8960330284
14 3. Makieta
przypadku serwomechanizmów, do sterowania używa się odpowiednio spreparowanych sygnałów PWM.
Źródłem zasilania modelu jest pakiet litowo-polimerowy firmy 3E Model - „Drivers”, złożony z 2 baterii połączonych szeregowo o łącznym napięciu 7,4V oraz pojemności 3,8Ah. Wydajność prądowa układu wynosi 25C, co daje maksymalne możliwe natężenie prądu równe 95A. Pakiet nie jest wyposażony w żaden układ zapobiegający nadmiernemu rozładowywaniu ogniw.
Do celów sterowania przyjęto kinematykę modelu taką samą jak dla samochodu kinematycznego o napędzie różnicowym na przednich kołach. Do celu sterowania wykorzystano informację z koderów umieszczonych w tylnych kołach.
Do sterowania użyto 2 sygnałów sterujących prędkości liniowej kół przednich oraz zmia-
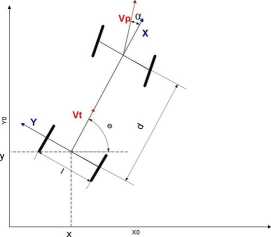
Rysunek 3.1 Schemat kinematyki
ny kąta skrętu tych kół. Natomiast dzięki koderom w kołach tylnych możemy odczytać prędkości ich obrotu, z których można wyznaczyć prędkość liniową kół tylnich vt oraz prędkość obrotową pojazdu uipoj. Wzory (3.1) oraz (3.2) opisują transformację z prędkości obrotowych, otrzymanych z koderów dla koła lewego uti oraz prawego utp na vt oraz
Upój.
(3.1)
(3.2)
Wtp + u>ti
vt = r—-
* 2 _ wtp — u>u Wpój — v ,
Z równań (3.3) opisujących kinematykę robota klasy (1,1) z początkiem układu lokalnego robota umieszczonym na środku tylnej osi kół samochodu oraz równań kinematyki (3.4) przy pomocy vt i wp0j, można wyprowadzić równania przedstawiające prędkość liniową pojazdu oraz prędkość zmiany kąta kół przednich.
|
' X ' |
cos (a) cos (9) |
0 | |
|
y |
cos (a) sin (0) |
0 | |
|
e |
sin (a) d |
0 | |
|
. 7 . |
0 |
1 |
Wyszukiwarka
Podobne podstrony:
img008 3 14 Do wtrętów używa się wkrętaków /rys.10/ Przy łączeniu plaskioh powier
- kierunek cybernetyczny to próby zastosowania modeli cybernetycznych typu serwomechanizm do sterowa
CCF20081123�015 197 u r. puszczalnych. Do zabiegów używa się opryskiwaczy ręcznych, plecakowych lub
26. Przepisy od p. 19 do p.25 stosuje się odpowiednio w przypadku rocznej (semestr
3) W przypadku, gdy do WKU zgłosi się żołnierz rezerwy bez nadanego przydziału mobilizacyjnego (ofic
ulega zniszczeniu, a próbka plastyczna zostaje spłaszczona. Do badań używa się próbek okrągłych, wyj
Pozycyjny system dwójkowy. Do programowania używa się systemu dwójkowego. Podstawą tego systemu
Zdjęcie681 1 ■■■ T Do ram i do listowia używa się złota raczej cienkiego, a do lamowań delikatnych w
W przypadku pomiarów elektromagnetycznych i akustycznych używa się pojęcia poziomu wielkości mocy lu
M-14.01.02 157 Do płatności przyjmuje się tonaż zgodnie z dokumentacją projektową, zwiększony lub
49968 Untitled Scanned 04 (14) nowie, od rana do wieczora, a zdarza się, że i w nocy. Muszą przeznac
W przypadku pomiarów elektromagnetycznych i akustycznych używa się pojęcia poziomu wielkości mocy lu
35211 Strona148 W przypadku gdy do masy -Wprowadza się lepiszcze w postaci ciekłej (np. żywicę roz
więcej podobnych podstron