Drgania ram – wersja komputerowa
q
+
q
q =
q
+
q =
=
o
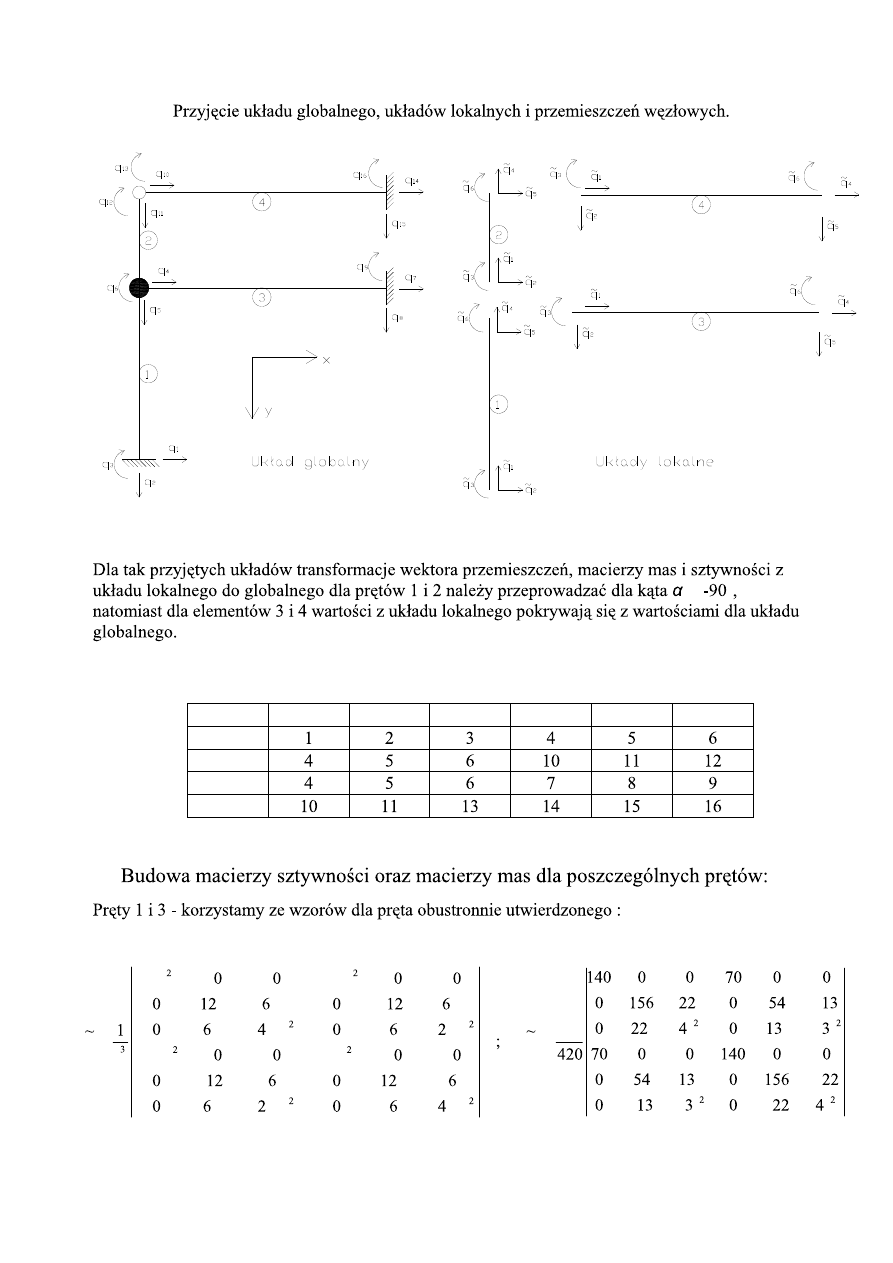
Tabela powiązań
nr pręta
1
2
3
4
5
6
1
2
3
4
l
l
l
l
l
l
l
l
l
l
l
l
l
M
EIl
EIl
EIl
EIl
EIl
EI
EIl
EI
EAl
EAl
EIl
EIl
EIl
EIl
EIl
EI
EIl
EI
EAl
EAl
l
K
−
−
−
−
−
−
=
−
−
−
−
−
−
−
−
=
µ
l
l
l
l
l
l
M
EI
EIl
EI
EAl
EAl
EIl
EIl
EIl
EI
EIl
EI
EAl
EAl
l
K
µ
=
−
−
−
−
−
−
=
l
l
l
l
l
l
M
EIl
EIl
EIl
EIl
EI
EI
EAl
EAl
EIl
EI
EI
EAl
EAl
l
K
−
−
−
−
=
−
−
−
−
−
−
=
µ
α
α
α
α
α
α
α
α
−
−
=
T
−
−
=
α
α
α
α
α
α
α
α
−
−
=
T
T
−
−
=
T
M
T
M
T
K
T
K
T
T
⋅
⋅
=
⋅
⋅
=
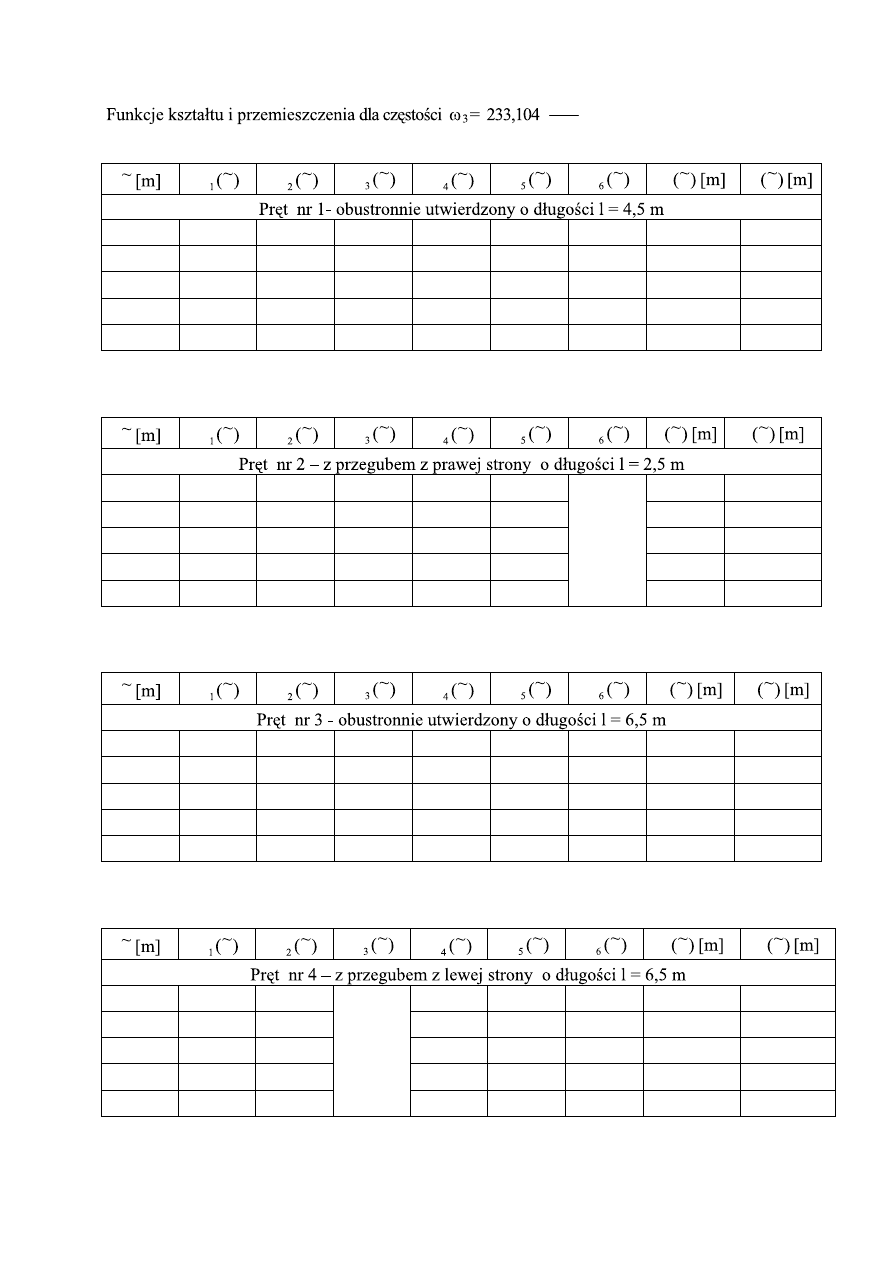
Pręt nr 1
−
−
−
−
−
−
=
−
−
−
−
−
−
−
−
=
M
K
−
−
−
−
−
−
−
−
=
K
−
−
−
−
−
−
=
M
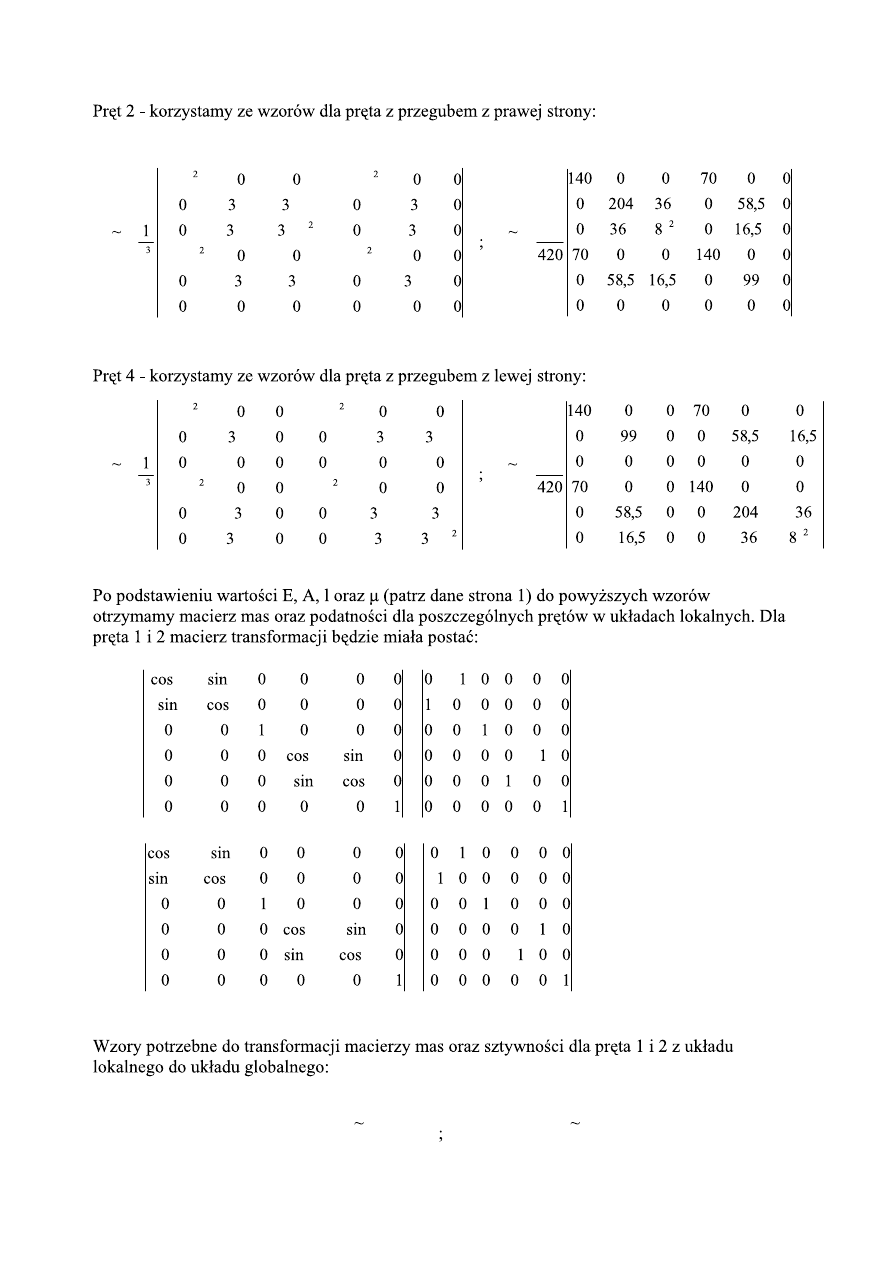
Pręt nr 2
=
−
−
−
−
−
−
=
M
K
=
−
−
−
−
−
−
=
M
K
Pręt nr 3
−
−
−
−
−
−
=
=
−
−
−
−
−
−
−
−
=
=
M
M
K
K
Pręt nr 4
−
−
−
−
=
=
−
−
−
−
−
−
=
=
M
M
K
K
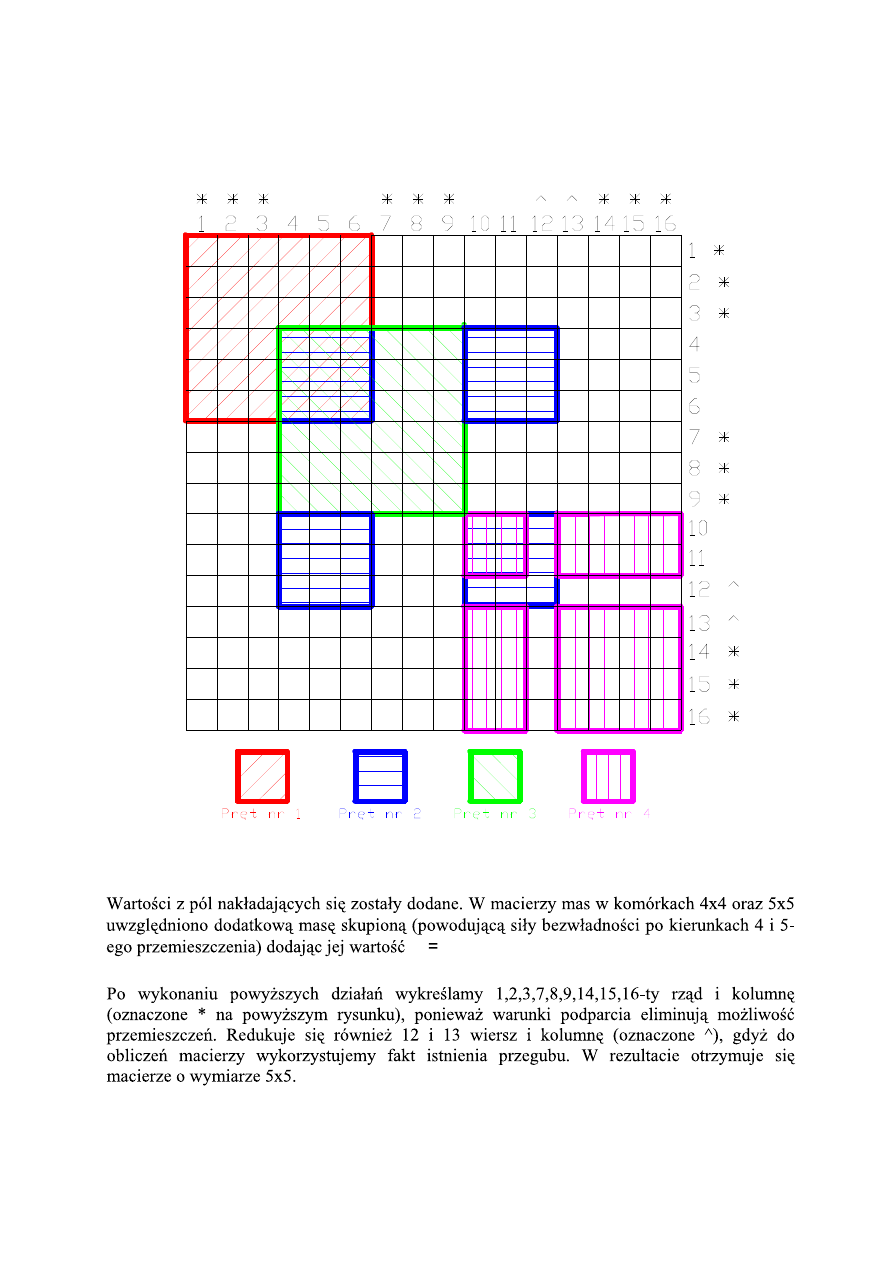
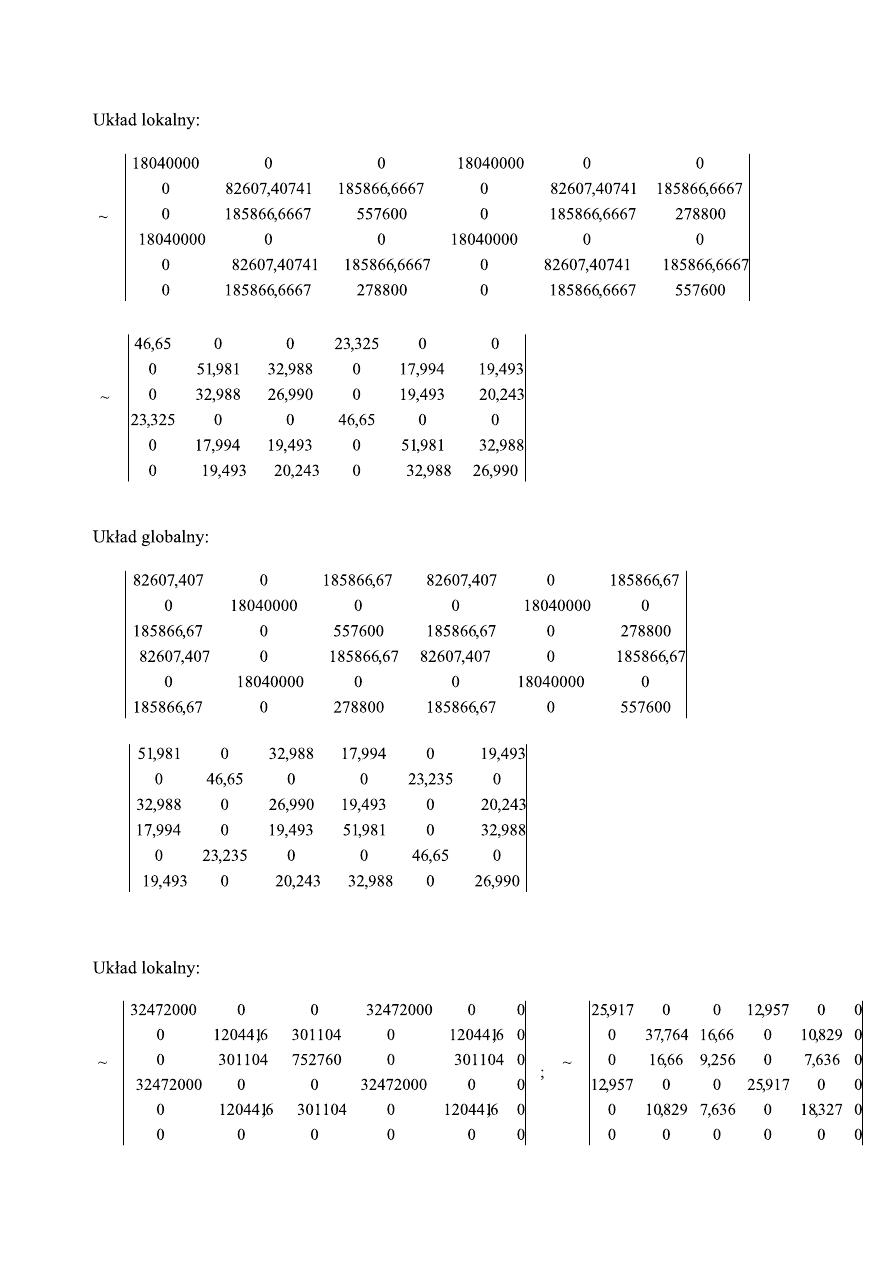
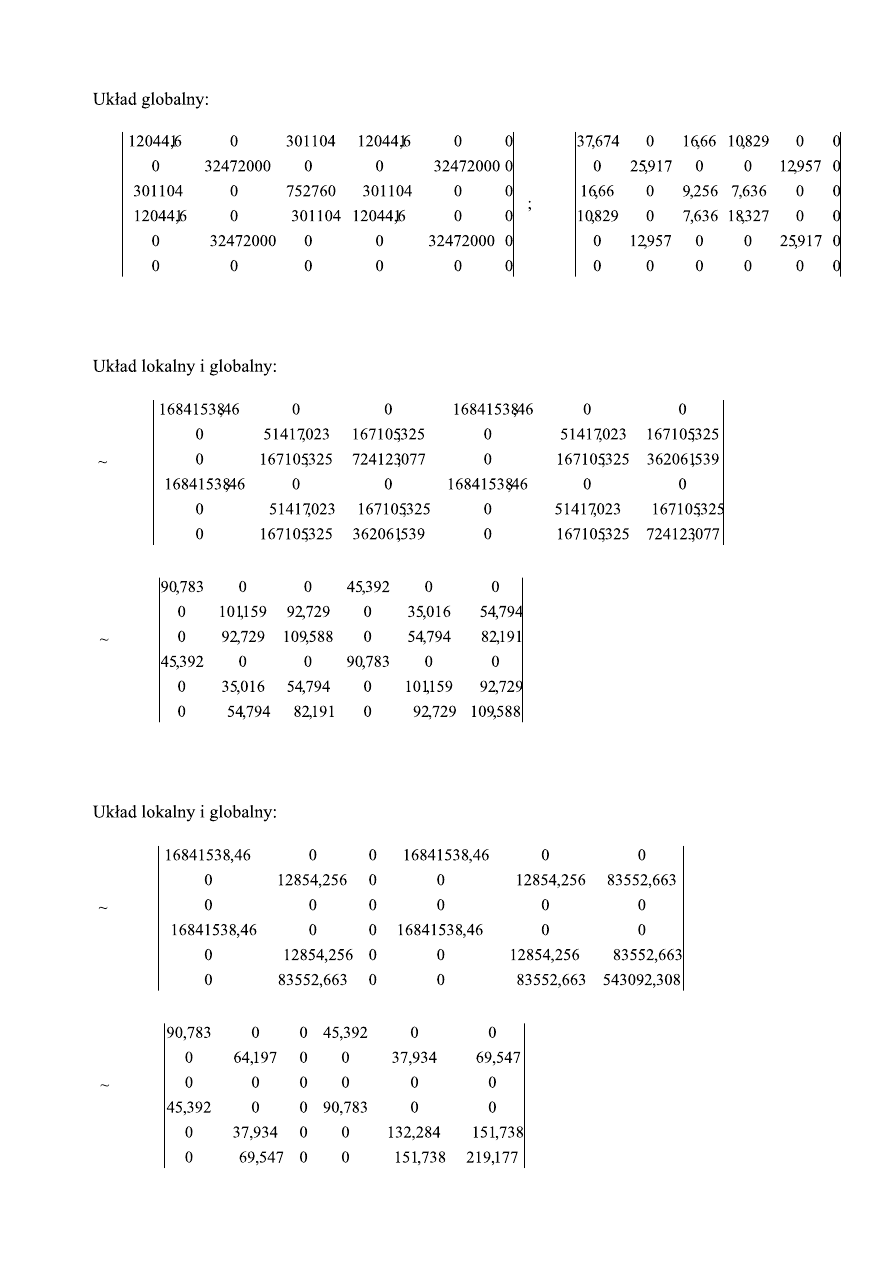
Agregacja macierzy mas i macierzy sztywności :
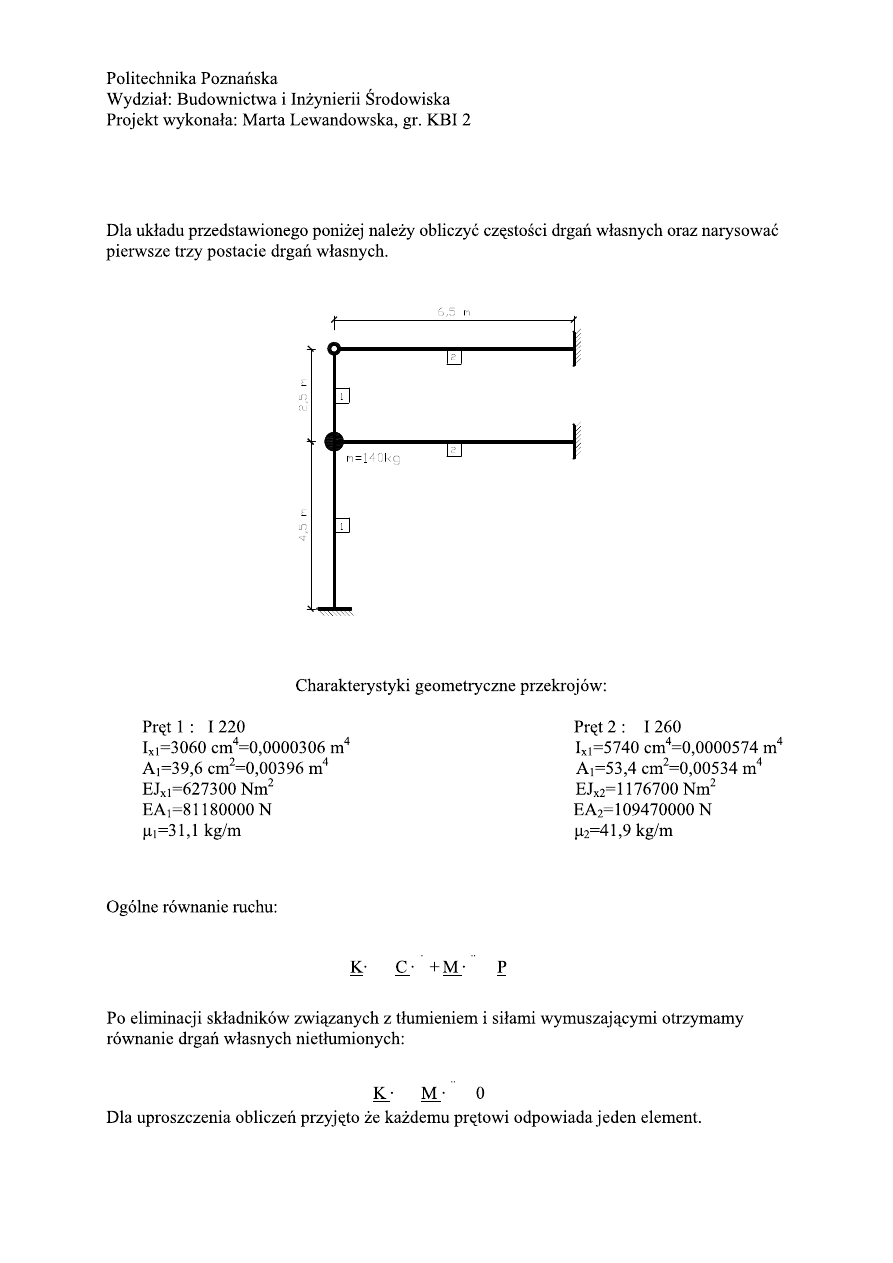
m 140[kg]
Macierz sztywności i odpowiadający jej wektor przemieszczeń węzłowych:
q
q
q
q
q
q
K
=
−
−
−
−
−
−
=
Macierz mas i odpowiadający jej wektor przemieszczeń węzłowych:
q
q
q
q
q
q
M
=
−
−
=
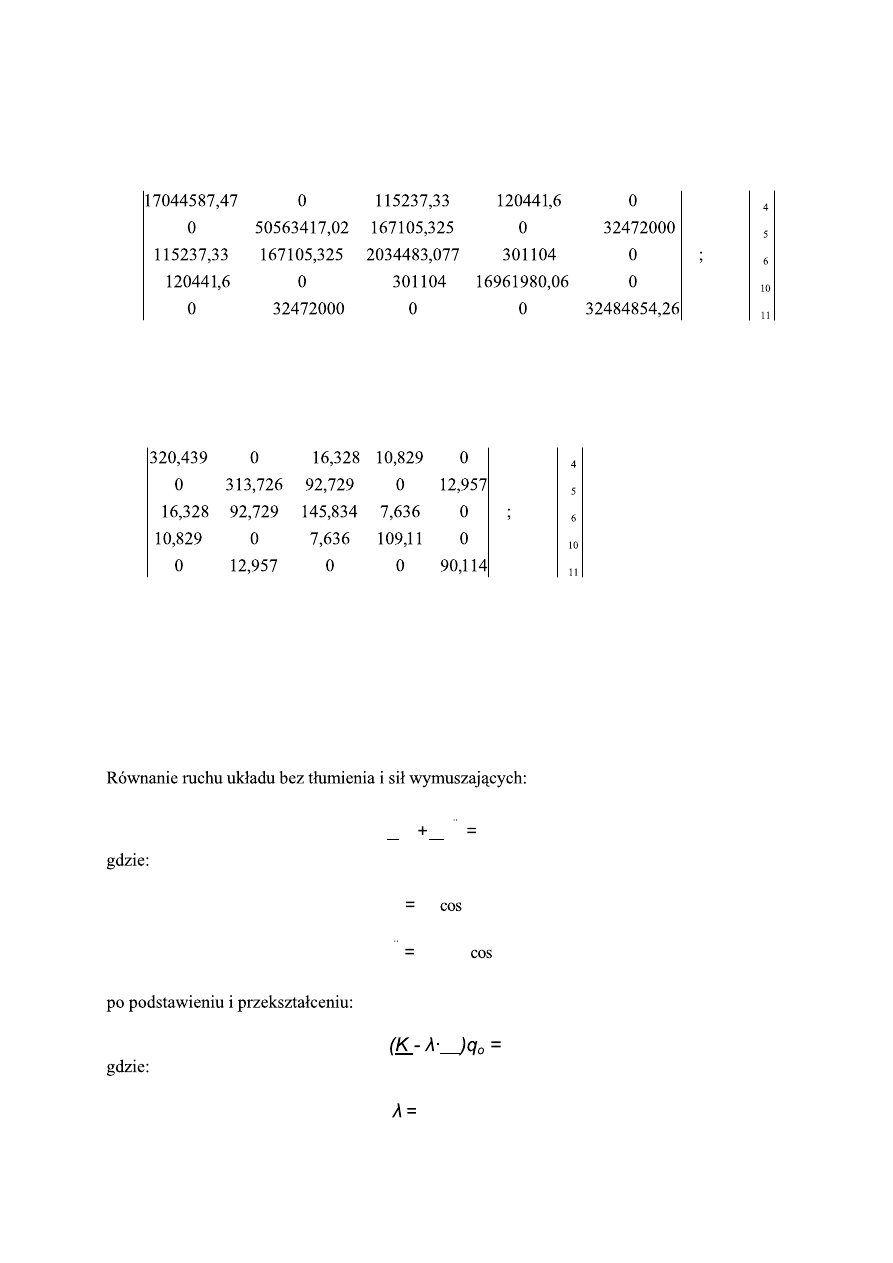
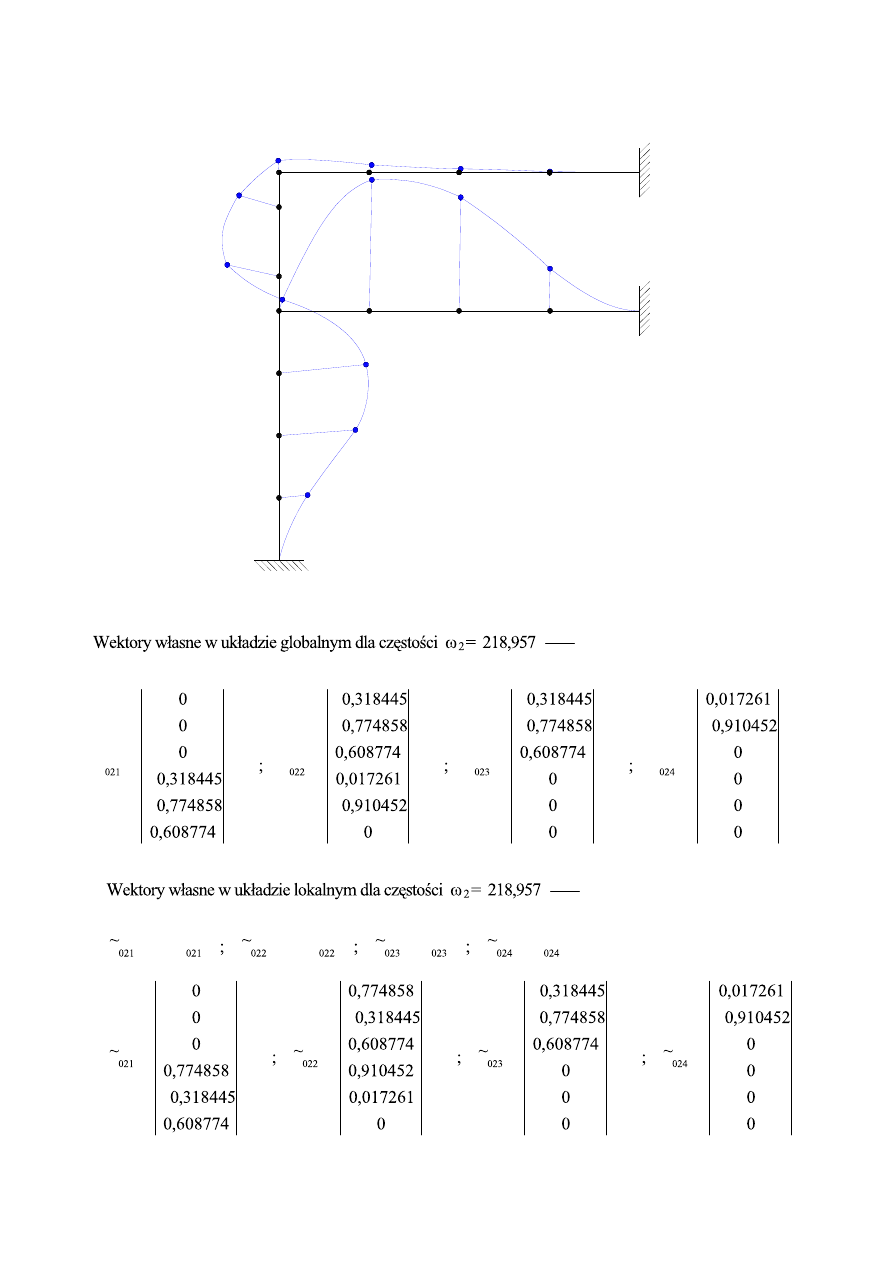
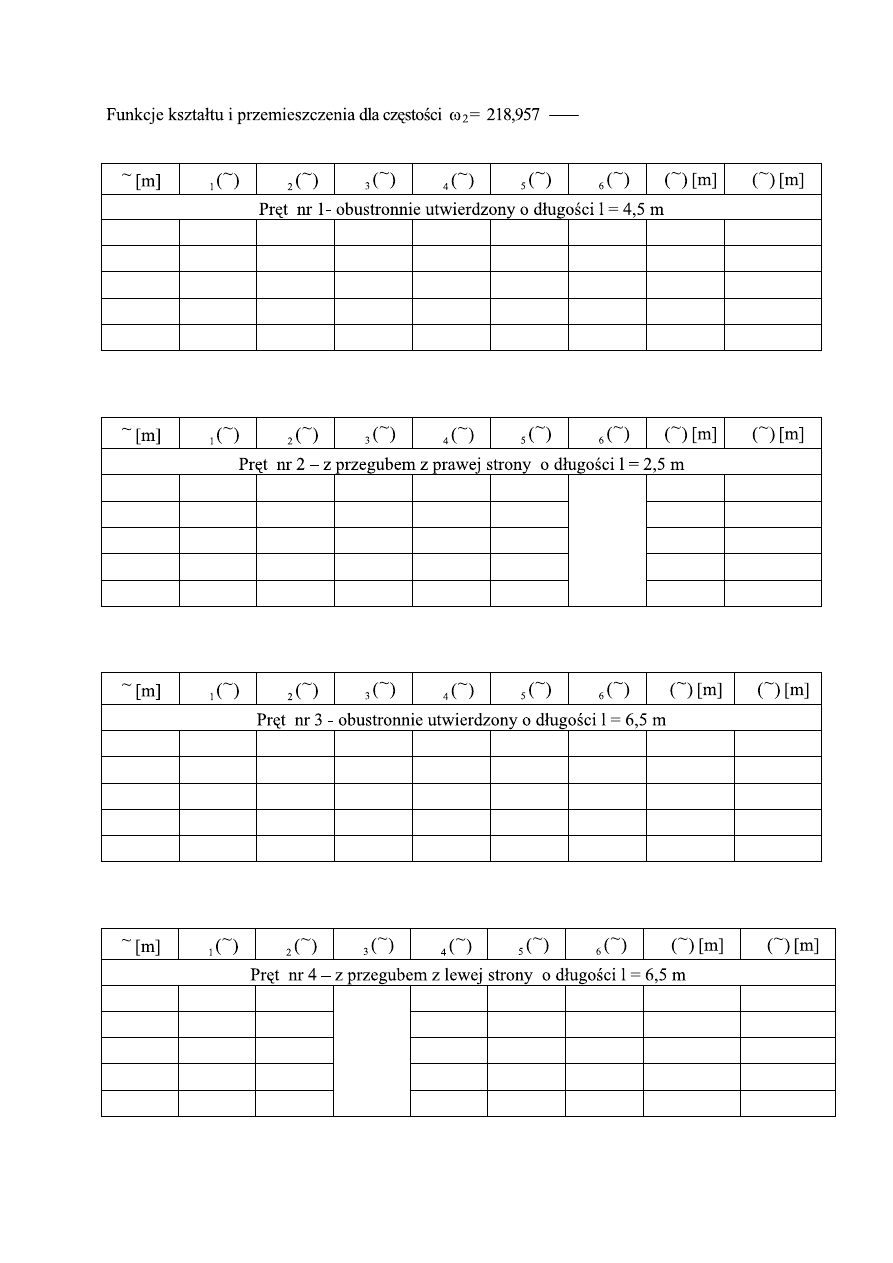
Obliczenie częstości drgań własnych i wektorów amplitud przemieszczeń dla
poszczególnych postaci drgań :
K·q M· q 0
q q
o
·
ωt
q
-q
o
·ω
2
·
ωt
M
0
ω
2
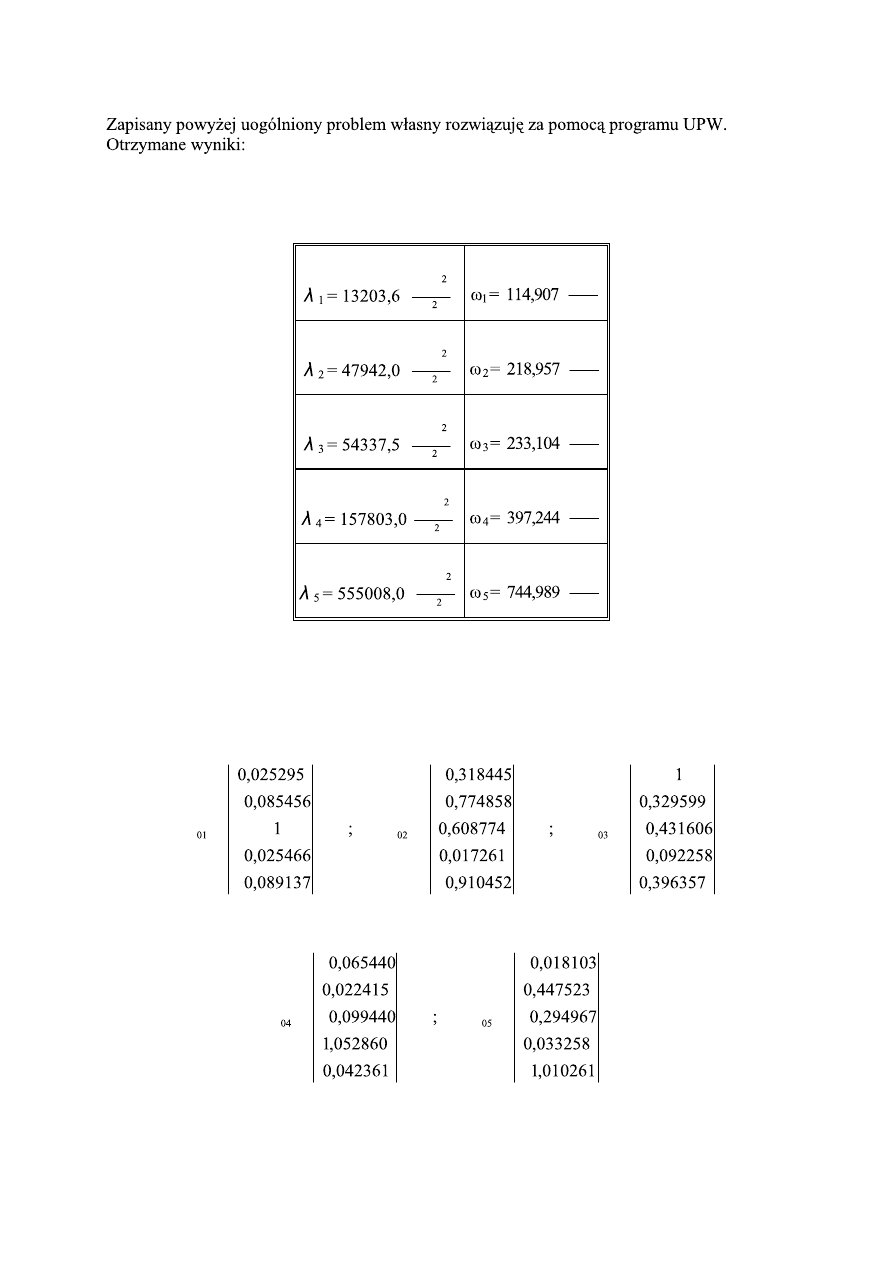
Wartości własne i odpowiadające im częstości drgań własnych:
s
rad
s
rad
s
rad
s
rad
s
rad
s
rad
s
rad
s
rad
s
rad
s
rad
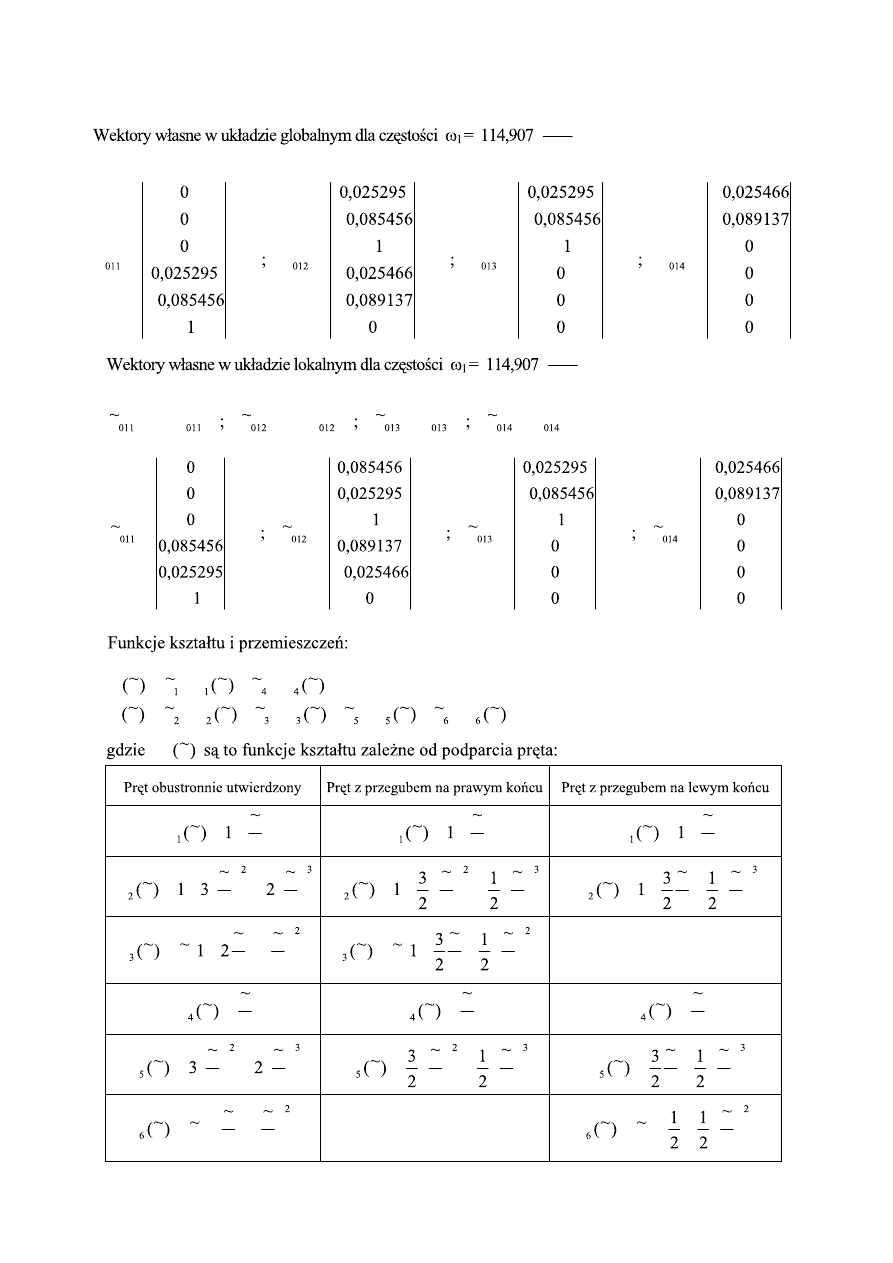
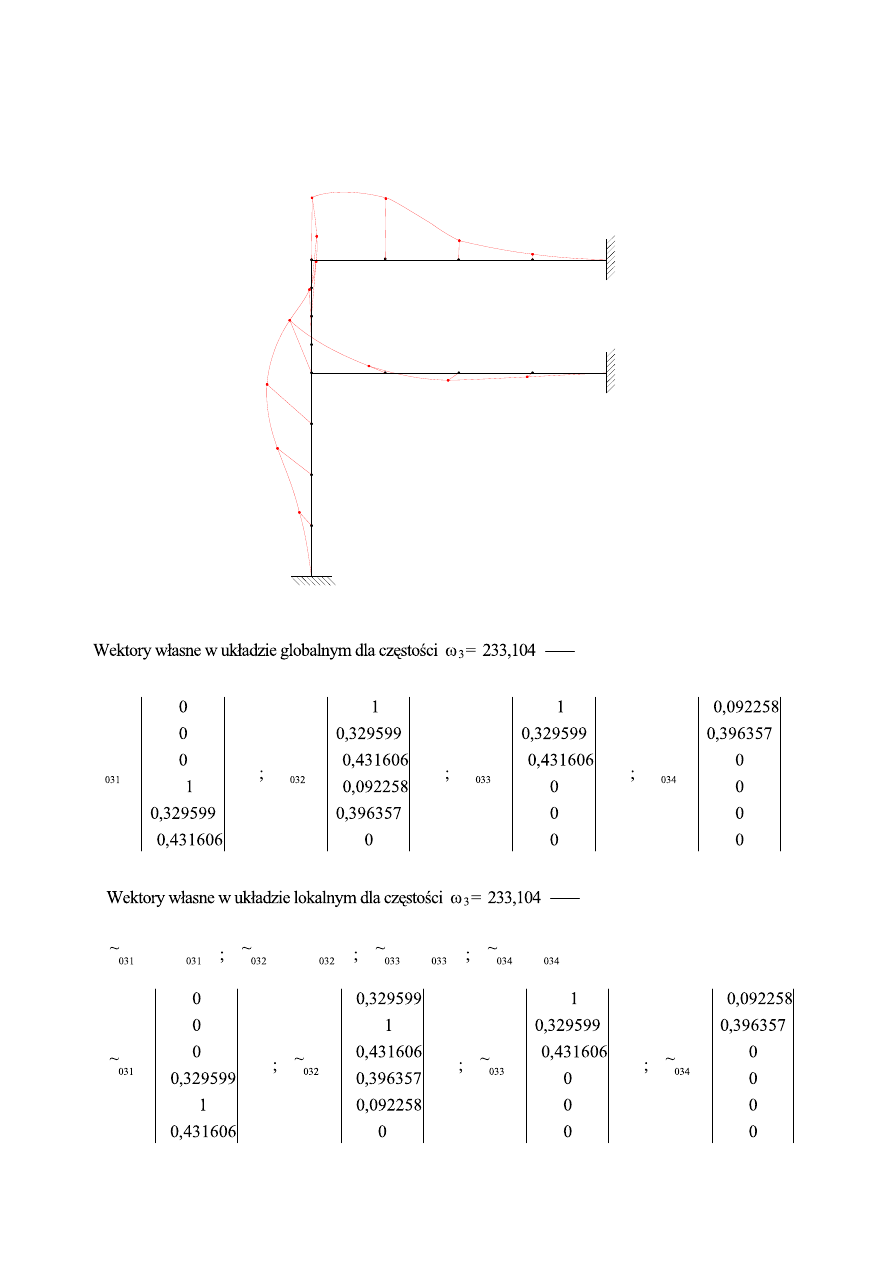
Wektory własne:
−
−
−
=
−
−
−
=
−
−
−
−
=
q
q
q
−
−
−
=
−
−
=
q
q
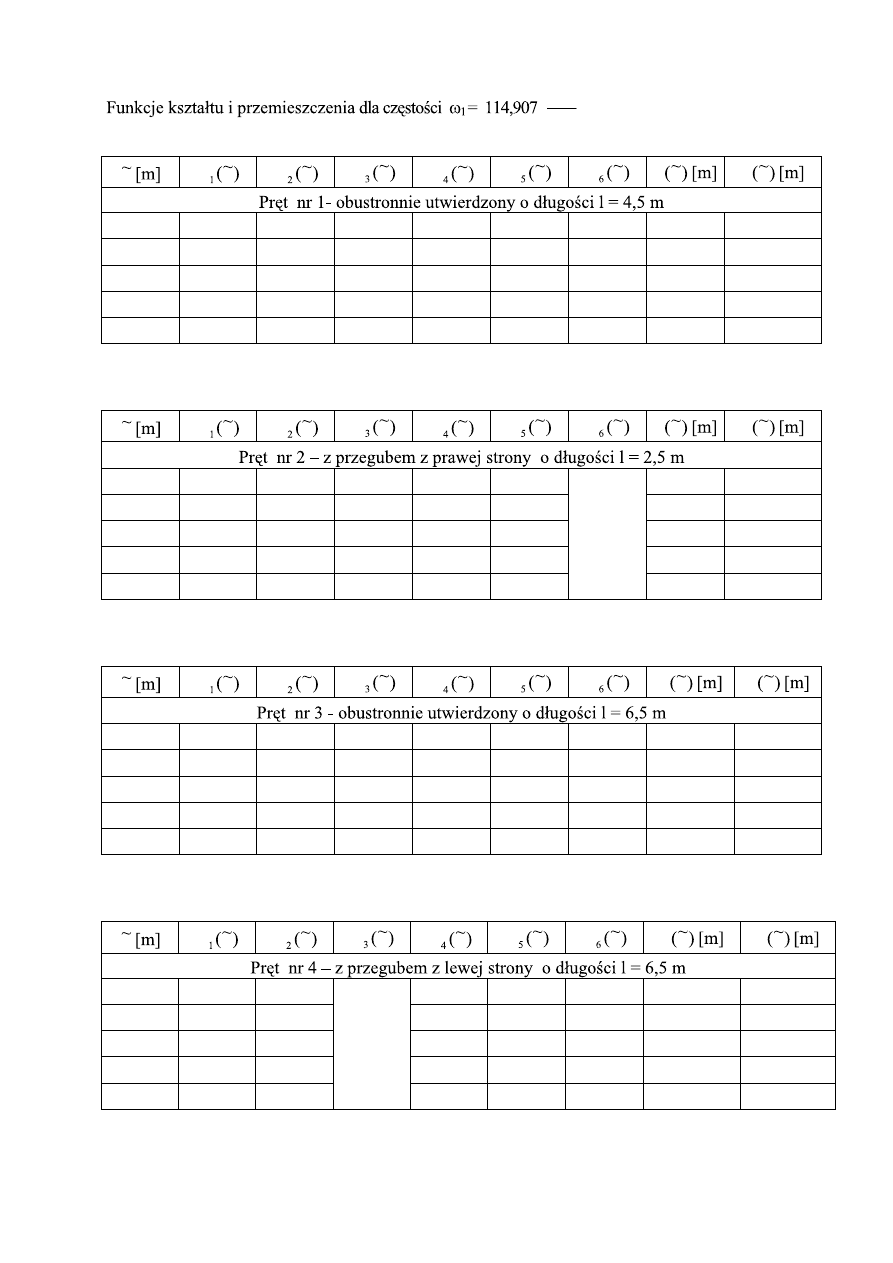
Wyznaczenie pierwszych trzech postaci drgań własnych:
s
rad
−
−
=
−
−
=
−
−
−
−
=
−
−
=
q
q
q
q
s
rad
q
q
q
q
q
T
q
q
T
q
=
=
⋅
=
⋅
=
−
−
=
−
−
=
−
−
=
−
=
q
q
q
q
x
N
q
x
N
q
x
u
⋅
+
⋅
=
- przemieszczenie poziome
x
N
q
x
N
q
x
N
q
x
N
q
x
v
⋅
+
⋅
+
⋅
+
⋅
=
- przemieszczenie pionowe
x
N
i
l
x
x
N
−
=
l
x
x
N
−
=
l
x
x
N
−
=
+
−
=
l
x
l
x
x
N
+
−
=
l
x
l
x
x
N
+
−
=
l
x
l
x
x
N
+
−
=
l
x
l
x
x
x
N
+
−
=
l
x
l
x
x
x
N
l
x
x
N
=
l
x
x
N
=
l
x
x
N
=
−
=
l
x
l
x
x
N
−
=
l
x
l
x
x
N
−
=
l
x
l
x
x
N
+
−
=
l
x
l
x
x
x
N
+
−
=
l
x
x
x
N
s
rad
x
x
N
x
N
x
N
x
N
x
N
x
N
x
u
x
v
0
1
1
0
0
0
0
0
0
1,125
0,75
0,84375
0,632813
0,25
0,15625
-0,21094 0,021364
0,2148898
2,25
0,5
0,5
0,5625
0,5
0,5
-0,5625
0,042728
0,5751475
3,375
0,25
0,15625
0,210938
0,75
0,84375
-0,63281 0,064092
0,6541552
4,5
0
0
0
1
1
0
0,085456
0,025295
x
x
N
x
N
x
N
x
N
x
N
x
N
x
u
x
v
0
1
1
0
0
0
0,085456
0,025295
0,625
0,75
0,914063 0,410156
0,25
0,085938
0,086376
-0,389224
1,25
0,5
0,6875
0,46875
0,5
0,3125
0,087297
-0,459318
1,875
0,25
0,367188 0,292969
0,75
0,632813
0,088217
-0,299796
2,5
0
0
0
1
1
0,089137
-0,025466
x
x
N
x
N
x
N
x
N
x
N
x
N
x
u
x
v
0
1
1
0
0
0
0
0,025295
-0,08546
1,625
0,75
0,84375
0,914063
0,25
0,15625
-0,30469
0,018971
-0,98617
3,25
0,5
0,5
0,8125
0,5
0,5
-0,8125
0,012648
-0,85523
4,875
0,25
0,15625
0,304688
0,75
0,84375
-0,91406
0,006324
-0,31804
6,5
0
0
0
1
1
0
0
0
x
x
N
x
N
x
N
x
N
x
N
x
N
x
u
x
v
0
1
1
0
0
0
-0,025466
-0,089137
1,625
0,75
0,632813
0,25
0,367188 -0,76172
-0,0190995
-0,056407
3,25
0,5
0,3125
0,5
0,6875
-1,21875
-0,012733
-0,0278553
4,875
0,25
0,085938
0,75
0,914063 -1,06641
-0,0063665
-0,0076602
6,5
0
0
1
1
0
0
0
Pierwsza postać drgań :
s
rad
−
=
−
−
=
−
−
−
=
−
−
=
q
q
q
q
s
rad
q
q
q
q
q
T
q
q
T
q
=
=
⋅
=
⋅
=
−
=
−
−
=
−
=
−
=
q
q
q
q
s
rad
x
x
N
x
N
x
N
x
N
x
N
x
N
x
u
x
v
0
1
1
0
0
0
0
0
0
1,125
0,75
0,84375
0,632813
0,25
0,15625
-0,21094 0,193715
-0,17817
2,25
0,5
0,5
0,5625
0,5
0,5
-0,5625
0,387429
-0,501658
3,375
0,25
0,15625
0,210938
0,75
0,84375
-0,63281 0,581144
-0,653928
4,5
0
0
0
1
1
0
0,774858
-0,318445
x
x
N
x
N
x
N
x
N
x
N
x
N
x
u
x
v
0
1
1
0
0
0
0,774858
-0,318445
0,625
0,75
0,914063 0,410156
0,25
0,085938
0,808757
-0,039903
1,25
0,5
0,6875
0,46875
0,5
0,3125
0,842655
0,071826
1,875
0,25
0,367188 0,292969
0,75
0,632813
0,876554
0,072346
2,5
0
0
0
1
1
0,910452
0,017261
x
x
N
x
N
x
N
x
N
x
N
x
N
x
u
x
v
0
1
1
0
0
0
0
-0,31845
-0,77486
1,625
0,75
0,84375
0,914063
0,25
0,15625
-0,30469
-0,23883
-0,09733
3,25
0,5
0,5
0,8125
0,5
0,5
-0,8125
-0,15922
0,1072
4,875
0,25
0,15625
0,304688
0,75
0,84375
-0,91406
-0,07961
0,064414
6,5
0
0
0
1
1
0
0
0
x
x
N
x
N
x
N
x
N
x
N
x
N
x
u
x
v
0
1
1
0
0
0
0,017261
-0,910452
1,625
0,75
0,632813
0,25
0,367188 -0,76172
0,0129458
-0,5761454
3,25
0,5
0,3125
0,5
0,6875
-1,21875
0,0086305
-0,2845163
4,875
0,25
0,085938
0,75
0,914063 -1,06641
0,0043153
-0,078242
6,5
0
0
1
1
0
0
0
Druga postać drgań :
s
rad
−
=
−
−
=
−
−
−
=
−
−
=
q
q
q
q
s
rad
q
q
q
q
q
T
q
q
T
q
=
=
⋅
=
⋅
=
−
=
−
−
=
−
−
−
−
−
=
−
−
−
=
q
q
q
q
s
rad
x
x
N
x
N
x
N
x
N
x
N
x
N
x
u
x
v
0
1
1
0
0
0
0
0
0
1,125
0,75
0,84375
0,632813
0,25
0,15625
-0,21094
-0,0824
-0,065208
2,25
0,5
0,5
0,5625
0,5
0,5
-0,5625
-0,1648
-0,257222
3,375
0,25
0,15625
0,210938
0,75
0,84375
-0,63281
-0,247199
-0,570624
4,5
0
0
0
1
1
0
-0,329599
-1
x
x
N
x
N
x
N
x
N
x
N
x
N
x
u
x
v
0
1
1
0
0
0
-0,3296
-1
0,625
0,75
0,914063 0,410156
0,25
0,085938
-0,34629
-1,099017
1,25
0,5
0,6875
0,46875
0,5
0,3125
-0,36298
-0,918646
1,875
0,25
0,367188 0,292969
0,75
0,632813
-0,37967
-0,552017
2,5
0
0
0
1
1
-0,39636
-0,092258
x
x
N
x
N
x
N
x
N
x
N
x
N
x
u
x
v
0
1
1
0
0
0
0
-1
0,329599
1,625
0,75
0,84375
0,914063
0,25
0,15625
-0,30469
-0,75
-0,11642
3,25
0,5
0,5
0,8125
0,5
0,5
-0,8125
-0,5
-0,18588
4,875
0,25
0,15625
0,304688
0,75
0,84375
-0,91406
-0,25
-0,08001
6,5
0
0
0
1
1
0
0
0
x
x
N
x
N
x
N
x
N
x
N
x
N
x
u
x
v
0
1
1
0
0
0
-0,092258
0,396357
1,625
0,75
0,632813
0,25
0,367188 -0,76172
-0,0691935
0,25081966
3,25
0,5
0,3125
0,5
0,6875
-1,21875
-0,046129
0,12386156
4,875
0,25
0,085938
0,75
0,914063 -1,06641
-0,0230645
0,03406193
6,5
0
0
1
1
0
0
0
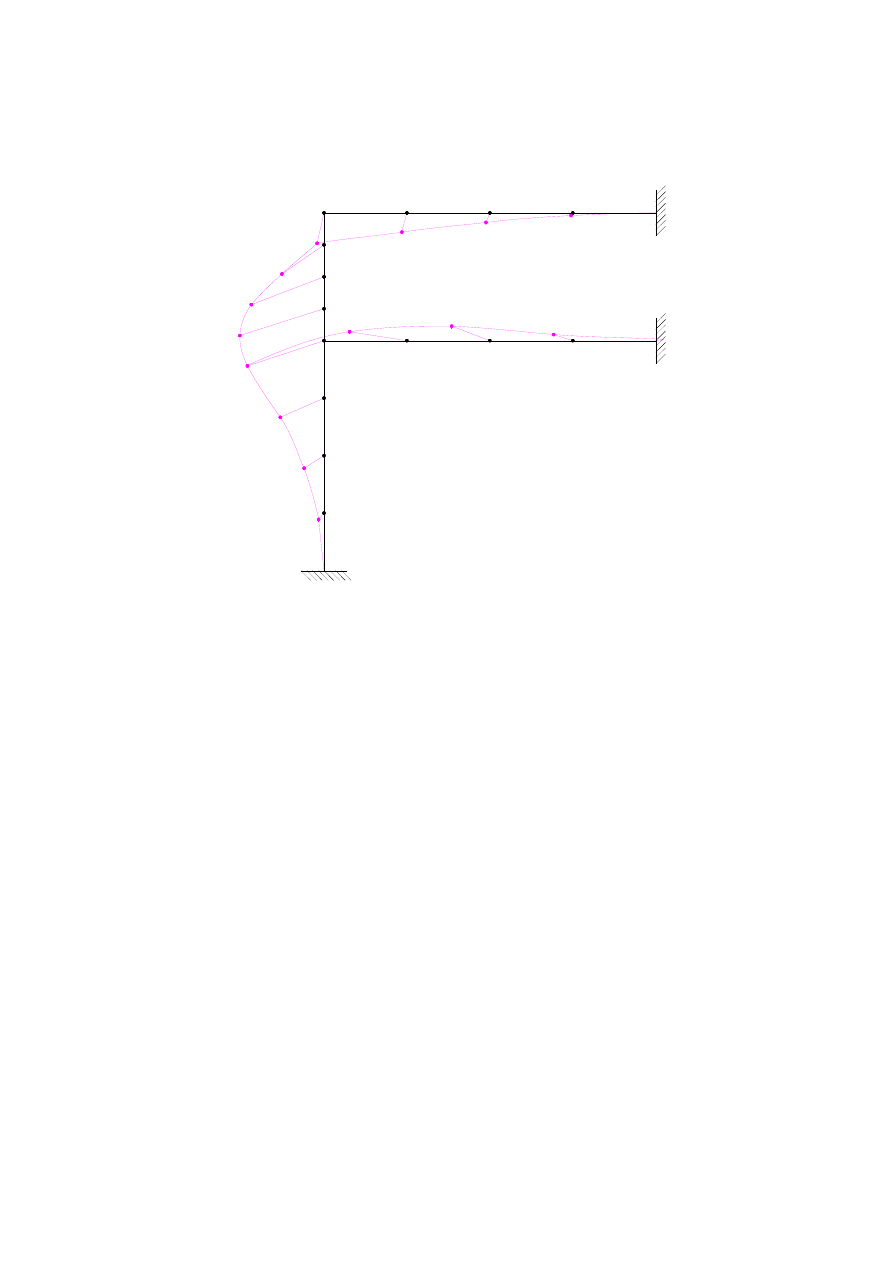
Trzecia postać drgań :
Wyszukiwarka
Podobne podstrony:
proj151
proj156 id 397568 Nieznany
proj150
proj158 id 397570 Nieznany
proj159
proj157 id 397569 Nieznany
proj154 id 397567 Nieznany
proj153
proj152
proj151
proj153
więcej podobnych podstron