Grzegorz Kamyszek KBI 1
28.12.2006
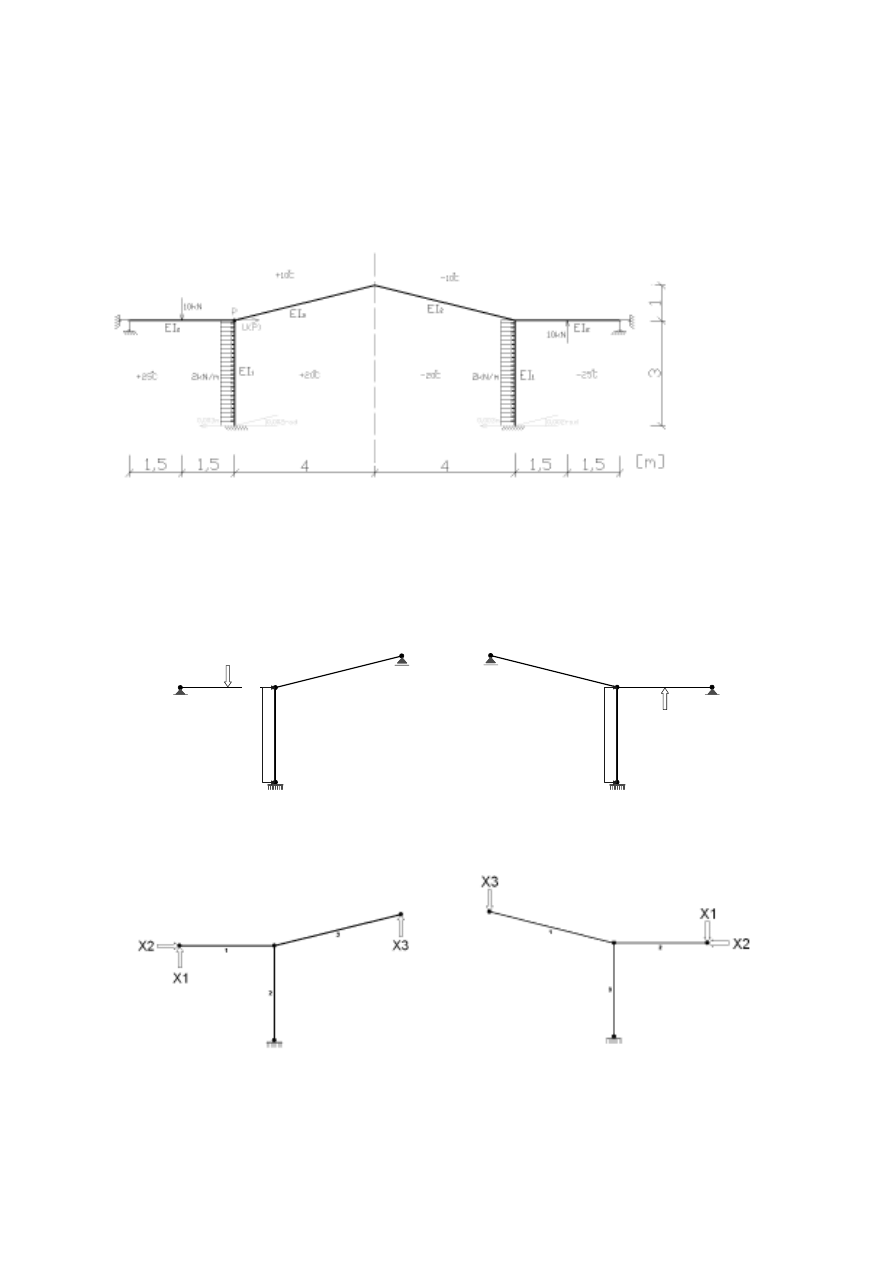
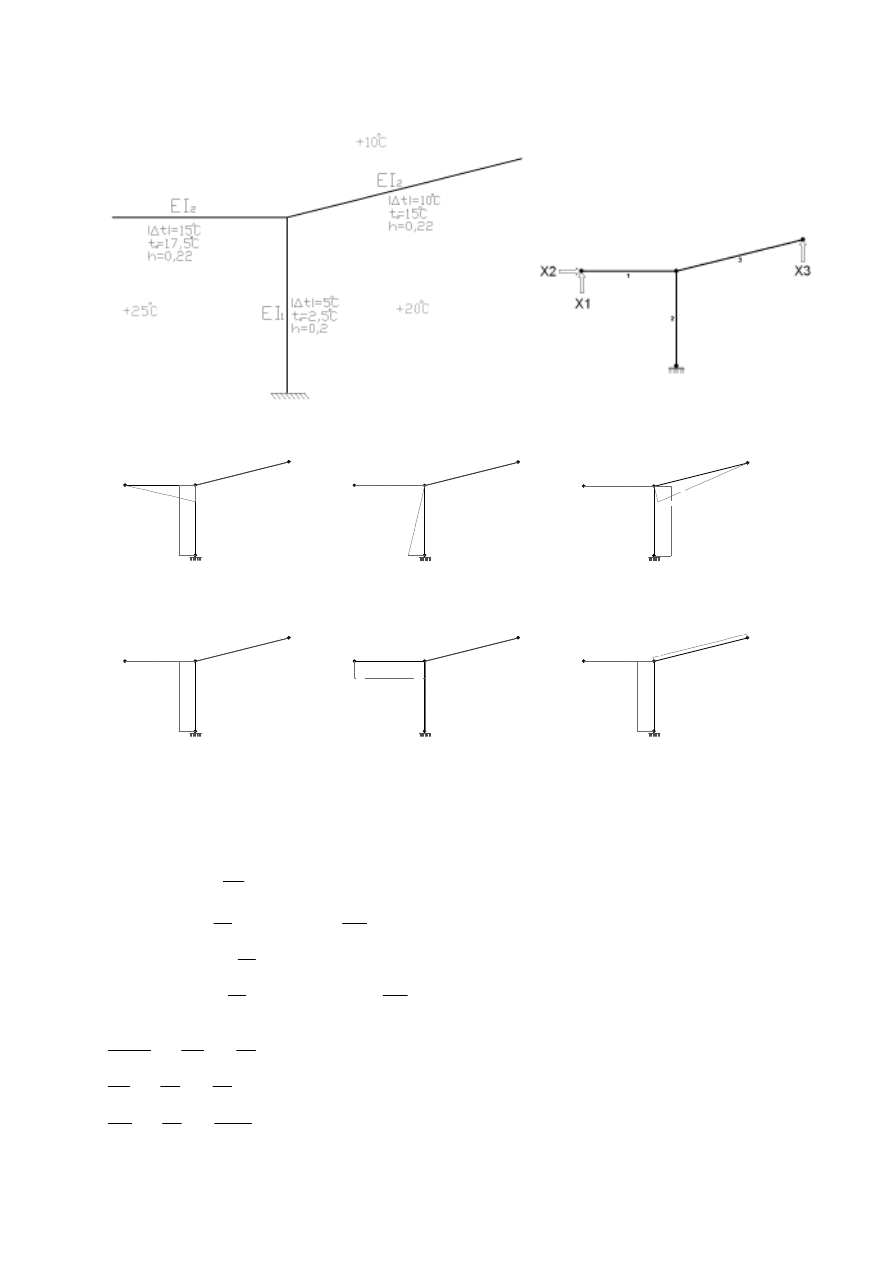
OBLICZANIE UKŁADÓW STATYCZNIE NIEWYZNACZALNYCH METOD
Ą SIŁ
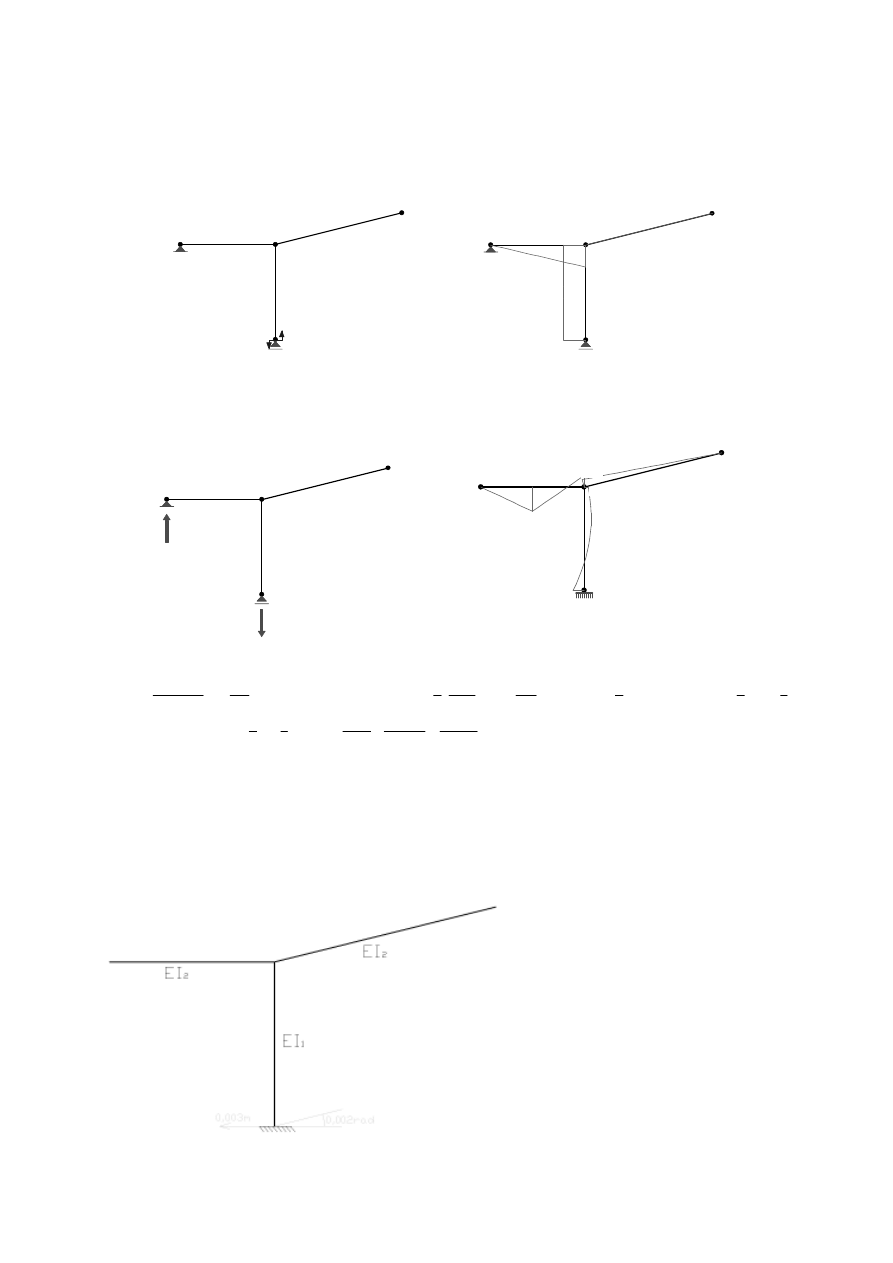
EI
1
=4387kN/m
2
EI
2
=6273kN/m
2
EI
2
=1,43EI
1
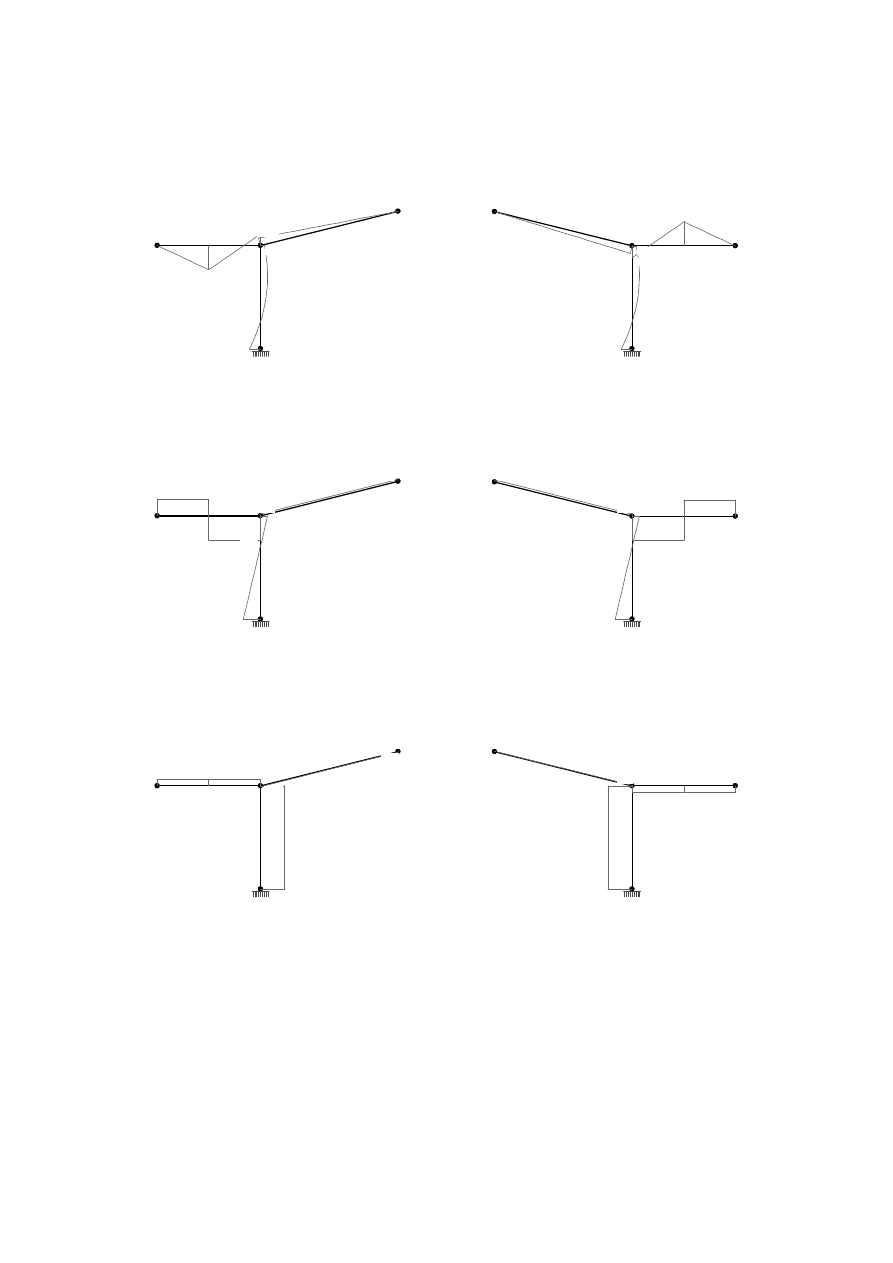
Z uwagi na anty-symetri
ę mogę podzielić układ na dwa układy wprowadzając na miejsce
podziału odpowiedni
ą podporę.
1
2
3
10,0000
2,0000
2,0000
1
2
3
10,0000
2,0000
2,0000
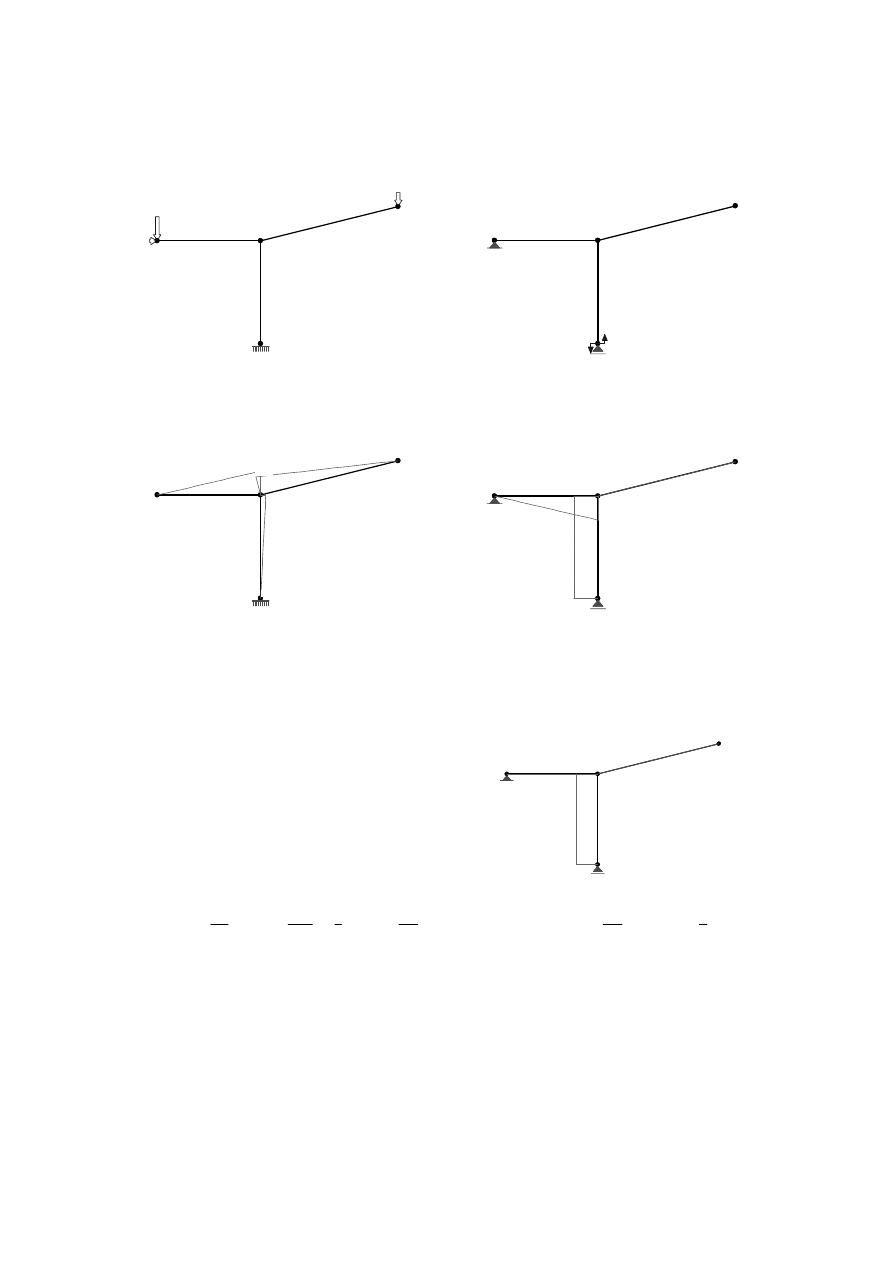
W ten sposób otrzymałem dwa układy, ka
żdy z SSN=3
Przyjmuj
ę układ podstawowy.
0
3
2
1
1
13
12
11
=
+
+
+
P
X
X
X
δ
δ
δ
δ
0
3
2
1
2
23
22
21
=
+
+
+
P
X
X
X
δ
δ
δ
δ
0
3
2
1
3
33
32
31
=
+
+
+
P
X
X
X
δ
δ
δ
δ
-1-
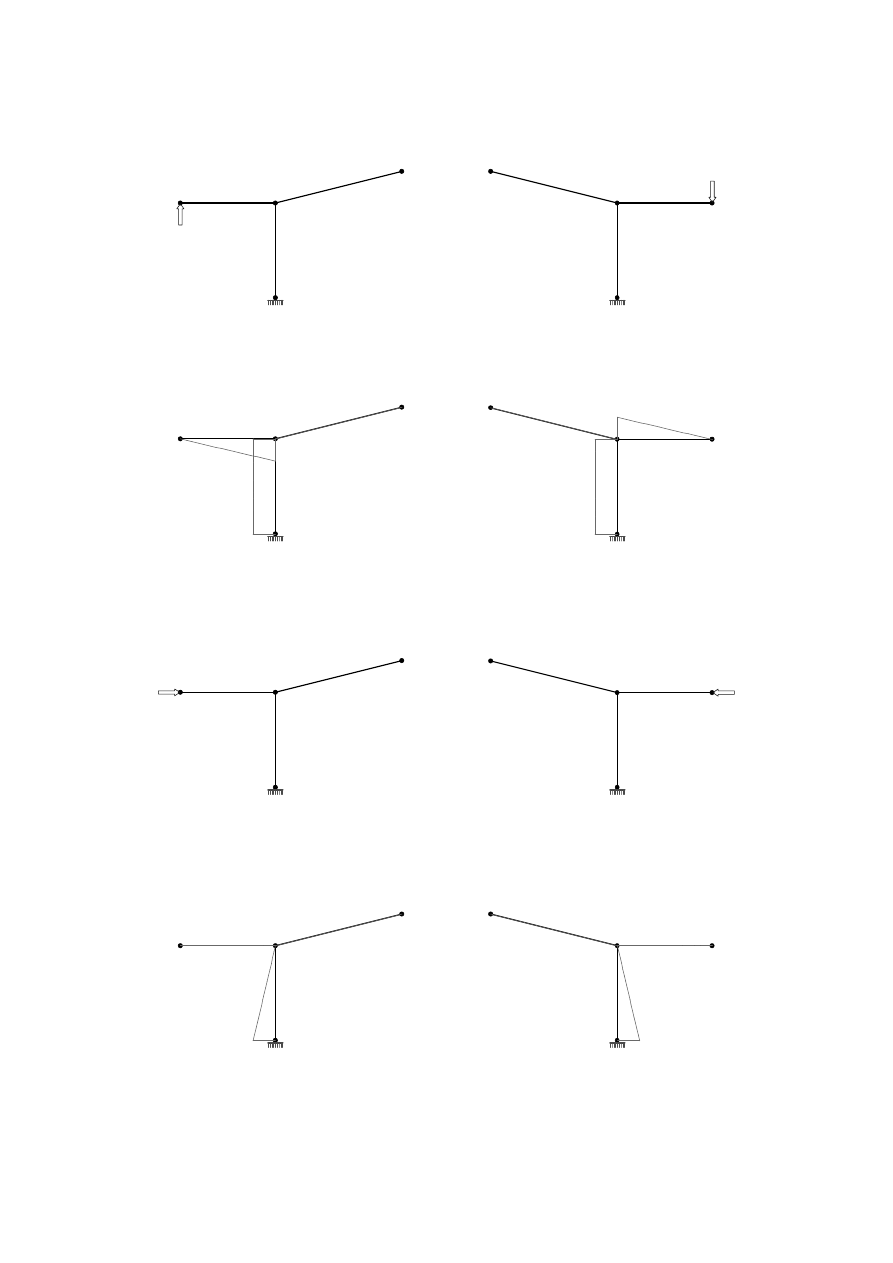
Stan X1=1
1
2
3
1,0000
1
2
3
1,0000
M1 [m]
1
2
3
3,0000
3,0000
3,0000
3,0000
3,0000
3,0000
1
2
3
-3,0000
-3,0000
3,0000
3,0000
3,0000
3,0000
Stan X2=1
1
2
3
1,0000
1
2
3
1,0000
M2 [m]
1
2
3
3,0000
3,0000
1
2
3
-3,0000
-3,0000
-2-
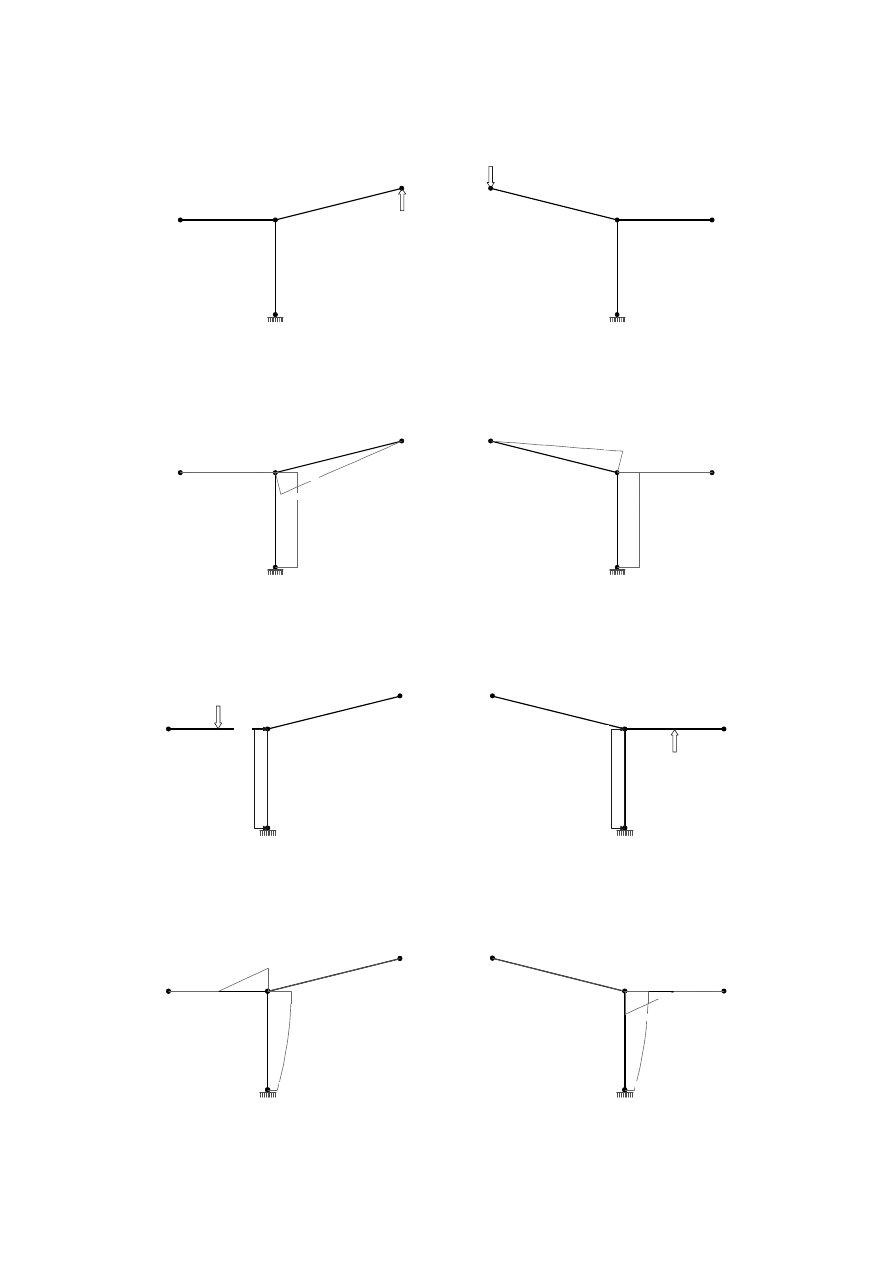
Stan X3=1
1
2
3
1,0000
1
2
3
1,0000
M3 [m]
1
2
3
-4,0000
-4,0000
-4,0000
-4,0000
4,0000
4,0000
1
2
3
-4,0000
-4,0000
-4,0000
-4,0000
-4,0000
-4,0000
Stan P
1
2
3
10,0000
2,0000
2,0000
1
2
3
10,0000
2,0000
2,0000
Mp [kNm]
1
2
3
-15,0000
-15,0000
-15,0000
-6,0000
-6,0000
-15,0000
1
2
3
15,0000
15,0000
-15,0000
-6,0000
-6,0000
-15,0000
-3-
1
1
1
2
1
11
2941
,
33
43
,
1
9
27
]
3
3
2
3
3
5
,
0
[
1
]
3
3
3
[
1
EI
EI
EI
EI
EI
=
+
=
⋅
⋅
⋅
⋅
+
⋅
⋅
=
δ
1
1
12
5
,
13
]
3
3
3
5
,
0
[
1
EI
EI
=
⋅
⋅
⋅
=
δ
1
1
13
36
]
4
3
3
[
1
EI
EI
−
=
⋅
⋅
−
=
δ
1
1
1
2
2
1
1
669
,
127
43
,
1
125
,
28
108
]
15
3
1
5
,
1
5
,
1
5
,
0
15
3
2
5
,
1
3
5
,
0
[
1
]
3
3
8
3
2
3
2
3
3
6
5
,
0
3
3
15
5
,
0
[
1
EI
EI
EI
EI
EI
P
−
=
−
−
=
⋅
⋅
⋅
⋅
+
⋅
⋅
⋅
⋅
−
⋅
⋅
⋅
⋅
+
⋅
⋅
⋅
+
⋅
⋅
⋅
−
=
δ
1
21
5
,
13
EI
=
δ
1
1
22
9
]
3
3
2
3
3
5
,
0
[
1
EI
EI
=
⋅
⋅
⋅
⋅
=
δ
1
1
23
18
]
4
3
3
5
,
0
[
1
EI
EI
−
=
⋅
⋅
⋅
−
=
δ
1
2
1
2
25
,
47
]
3
5
,
0
3
8
3
2
3
2
3
3
2
3
6
5
,
0
3
3
1
3
15
5
,
0
[
1
EI
EI
P
−
=
⋅
⋅
⋅
⋅
⋅
+
⋅
⋅
⋅
⋅
+
⋅
⋅
⋅
⋅
−
=
δ
1
31
36
EI
−
=
δ
1
32
18
EI
−
=
δ
1
1
1
2
1
33
367
,
63
43
,
1
)
3
(
97
,
21
48
]
4
3
2
12
,
4
4
5
,
0
[
1
]
4
3
4
[
1
EI
EI
EI
EI
EI
=
+
=
⋅
⋅
⋅
⋅
+
⋅
⋅
=
δ
1
2
1
3
144
]
4
3
8
3
2
3
2
4
3
6
5
,
0
4
3
15
5
,
0
[
1
EI
EI
P
=
⋅
⋅
⋅
⋅
+
⋅
⋅
⋅
+
⋅
⋅
⋅
=
δ
1
1
1
1
1
/
0
669
,
127
3
36
2
5
,
13
1
2941
,
33
EI
EI
X
EI
X
EI
X
EI
⋅
=
−
−
+
kN
X
018
,
4
1
=
1
1
1
1
1
/
0
25
,
47
3
18
2
9
1
5
,
13
EI
EI
X
EI
X
EI
X
EI
⋅
=
−
−
+
kN
X
752
,
1
2
−
=
1
1
1
1
1
/
0
144
3
367
,
63
2
18
1
36
EI
EI
X
EI
X
EI
X
EI
⋅
=
+
+
−
−
kN
X
4875
,
0
3
−
=
[kN]
1
2
3
4,0180
-1,7520
10,0000
2,0000
2,0000
0,4875
1
2
3
0,4875
10,0000
4,0180
1,7520
2,0000
2,0000
-4-
WYKRESY
M
(n)
[kNm]
1
2
3
6,0270
6,0270
-2,9460
6,0270
-2,9460
-0,9960
2,7480
2,7480
-1,7634
-1,9500
-1,9500
1
2
3
1,9500
1,9500
2,9460
-6,0270
-6,0270
2,9460
-6,0270
-0,9960
2,7480
2,7480
-1,7634
T
(n)
[kN]
1
2
3
4,018
4,018
-5,982
-5,982
4,018
-5,982
-1,752
4,248
4,248
-1,752
0,473
0,473
0,473
0,473
1
2
3
0,473
0,473
0,473
0,473
-5,982
-5,982
4,018
4,018
4,018
-5,982
-1,752
4,248
4,248
-1,752
N
(n)
[kN]
1
2
3
1,752
1,752
1,752
1,752
1,752
1,752
-6,469
-6,469
-6,469
-6,469
-0,118
-0,118
-0,118
-0,118
1
2
3
0,118
0,118
0,118
0,118
-1,752
-1,752
-1,752
-1,752
-1,752
-1,752
6,469
6,469
6,469
6,469
-5-
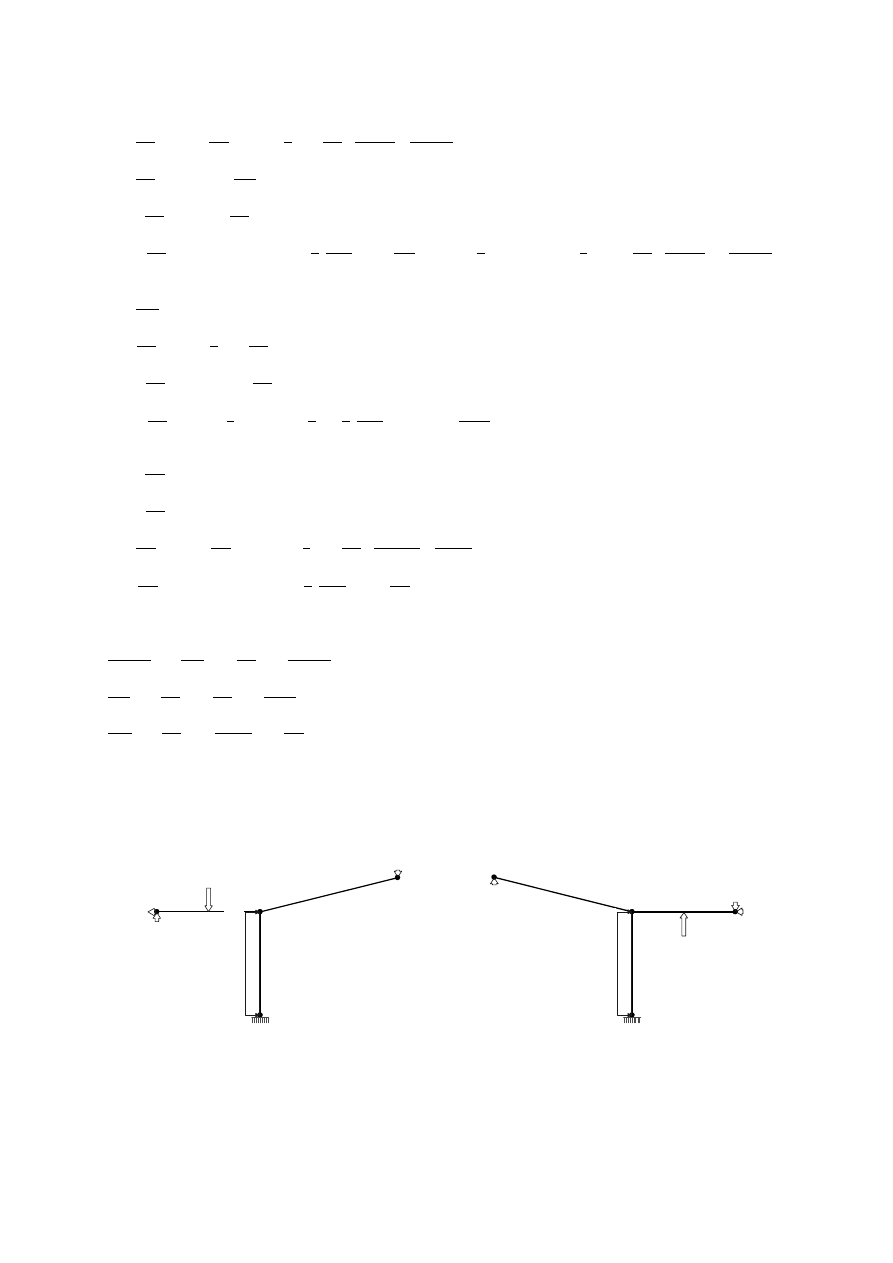
KONTROLA KINEMATYCZNA
Zmieniam układ podstawowy
M
(o)
[m]
1
2
3
1,0000
1
2
3
1,0000
1,0000
1,0000
1,0000
1,0000
1,0000
[kN]
M
(n)
[kNm]
1
2
3
4
0,3333
0,3333
1
2
3
6,0270
6,0270
-2,9460
6,0270
-2,9460
-0,9960
2,7480
2,7480
-1,7634
-1,9500
-1,9500
)
1
3
1
5
,
0
3
2
(
5
,
1
03
,
6
5
,
0
5
,
0
3
2
5
,
1
03
,
6
5
,
0
[
1
]
1
3
8
3
2
3
2
1
3
75
,
2
5
,
0
1
3
996
,
0
5
,
0
[
1
2
2
1
)
(
)
(
⋅
+
⋅
⋅
⋅
⋅
+
⋅
⋅
⋅
⋅
+
⋅
⋅
⋅
⋅
−
⋅
⋅
⋅
+
⋅
⋅
⋅
−
=
∑ ∫
=
EI
EI
dx
EI
M
M
o
n
B
ϕ
%
33
,
0
10
99
,
1
0088
,
0
43
.
1
685
,
2
869
,
1
)]
5
,
0
3
1
1
3
2
(
5
,
1
94
,
2
5
,
0
6
1
1
1
⇒
⋅
=
=
+
−
=
⋅
+
⋅
⋅
⋅
⋅
−
−
EI
EI
EI
OSIADANIE PODPÓR
0
3
2
1
1
13
12
11
=
+
+
+
∆
δ
δ
δ
δ
X
X
X
0
3
2
1
2
23
22
21
=
+
+
+
∆
δ
δ
δ
δ
X
X
X
0
3
2
1
3
33
32
31
=
+
+
+
∆
δ
δ
δ
δ
X
X
X
∆
∑
−
=
−
∆
i
i
R
δ
-6-
1
2
3
1,0000
1
2
3
1,0000
1
2
3
1,0000
X1=1
X2=1
X3=1
1
2
3
4
1,0000
3,0000
1
2
3
4
1,0000
3,0000
1
2
3
4
1,0000
4,0000
m
R
006000
,
0
)
3
002
,
0
(
1
1
−
=
⋅
−
=
∆
∑
−
=
−
∆
δ
m
R
009000
,
0
)
1
003
,
0
3
002
,
0
(
2
2
−
=
⋅
+
⋅
−
=
∆
∑
−
=
−
∆
δ
m
R
008000
,
0
)
4
002
,
0
(
3
3
=
⋅
−
=
∆
∑
−
=
−
∆
δ
1
1
1
1
/
0
006000
,
0
3
36
2
5
,
13
1
2941
,
33
EI
X
EI
X
EI
X
EI
⋅
=
−
−
+
kN
X
83
,
1
1
−
=
1
1
1
1
/
0
009000
,
0
3
18
2
9
1
5
,
13
EI
X
EI
X
EI
X
EI
⋅
=
−
−
+
kN
X
14
,
9
2
=
1
1
1
1
/
0
008000
,
0
3
367
,
63
2
18
1
36
EI
X
EI
X
EI
X
EI
⋅
=
+
+
−
−
kN
X
0
,
1
3
=
KONTROLA KINEMATYCZNA
1
2
3
1,83
9,14
1,00
1
2
3
1,0000
M
(n)
[kNm]
M
(o)
[m]
1
2
3
-5,49
-5,49
-9,49
17,93
17,93
-9,49
4,00
4,00
1
2
3
1,0000
1,0000
1,0000
1,0000
1,0000
1,0000
-7-
=
⋅
⋅
⋅
⋅
−
⋅
⋅
⋅
−
⋅
⋅
⋅
+
⋅
−
=
∑ ∫
∑
+
∆
−
=
)]
1
3
2
3
49
,
5
5
,
0
(
1
)
1
3
49
,
9
5
,
0
1
3
93
,
17
5
,
0
(
1
[
)
1
002
,
0
(
2
1
)
(
)
(
)
(
EI
EI
dx
EI
M
M
R
o
n
n
B
ϕ
`
%
37
,
0
0000106
,
0
000875
,
0
00289
,
0
002
,
0
43
,
1
49
,
5
66
,
12
002
,
0
1
1
⇒
=
−
+
−
=
−
+
−
rad
EI
EI
WYKRESY
M
(n)
[kNm]
1
2
3
-5,49
-5,49
-9,49
17,93
17,93
-9,49
4,00
2,00
2,00
4,00
1
2
3
-4,00
-4,00
5,49
5,49
-9,49
17,93
17,93
-9,49
T
(n)
[kN]
1
2
3
-1,83
-1,83
-1,83
-1,83
9,14
9,14
9,14
9,14
-0,97
-0,97
-0,97
-0,97
-0,97
-0,97
1
2
3
-0,97
-0,97
-0,97
-0,97
-1,83
-1,83
-1,83
-1,83
9,14
9,14
9,14
9,14
N
(n)
[kN]
1
2
3
-9,14
-9,14
-9,14
-9,14
-0,83
-0,83
-0,83
-0,83
0,24
0,24
0,24
0,24
0,24
0,24
1
2
3
-0,24
-0,24
-0,24
-0,24
9,14
9,14
9,14
9,14
0,83
0,83
0,83
0,83
-8-
TEMPERATURA
t
0
=0ºC
α
t
=1,2·10
-5
1/ºC
Układ podstawowy:
M1[m]
M2[m]
M3[m]
1
2
3
3,0000
3,0000
3,0000
3,0000
3,0000
3,0000
1
2
3
3,0000
3,0000
1
2
3
-4,0000
-4,0000
-4,0000
-4,0000
4,0000
4,0000
N1[-]
N2[-]
N3[-]
1
2
3
1,00
1,00
1,00
1,00
1
2
3
-1,00
-1,00
-1,00
-1,00
1
2
3
1,00
1,00
1,00
1,00
0,24
0,24
0,24
0,24
0
3
2
1
1
13
12
11
=
+
+
+
t
X
X
X
δ
δ
δ
δ
0
3
2
1
2
23
22
21
=
+
+
+
t
X
X
X
δ
δ
δ
δ
0
3
2
1
3
33
32
31
=
+
+
+
t
X
X
X
δ
δ
δ
δ
∑
∑ ∫
+
∫
∆
=
dx
t
N
dx
h
t
M
t
i
t
i
it
0
α
α
δ
m
t
006472
,
0
10
9
003682
,
0
002700
,
0
]
5
,
2
10
2
,
1
3
1
[
]
22
,
0
15
10
2
,
1
3
3
5
,
0
2
,
0
5
10
2
,
1
3
3
[
5
5
5
5
1
=
⋅
+
+
=
⋅
⋅
⋅
⋅
+
⋅
⋅
⋅
⋅
⋅
+
⋅
⋅
⋅
⋅
=
−
−
−
−
δ
m
t
00072
,
0
00063
,
0
00135
,
0
]
5
,
17
10
2
,
1
3
1
[
]
2
,
0
5
10
2
,
1
3
3
5
,
0
[
5
5
2
=
−
=
⋅
⋅
⋅
⋅
−
⋅
⋅
⋅
⋅
⋅
=
−
−
δ
m
t
003472
,
0
)]
15
10
2
,
1
12
,
4
24
,
0
(
)
5
,
2
10
2
,
1
3
1
[(
)]
22
,
0
10
10
2
,
1
12
,
4
4
5
,
0
(
)
2
,
0
5
10
2
,
1
3
4
(
[
5
5
5
5
3
=
⋅
⋅
⋅
⋅
+
⋅
⋅
⋅
⋅
+
⋅
⋅
⋅
⋅
⋅
+
⋅
⋅
⋅
⋅
−
=
−
−
−
−
δ
1
1
1
1
/
0
006472
,
0
3
36
2
5
,
13
1
2941
,
33
EI
X
EI
X
EI
X
EI
⋅
=
+
−
+
kN
X
048
,
3
1
−
=
1
1
1
1
/
0
00072
,
0
3
18
2
9
1
5
,
13
EI
X
EI
X
EI
X
EI
⋅
=
+
−
+
kN
X
642
,
0
2
=
1
1
1
1
/
0
003472
,
0
3
367
,
63
2
18
1
36
EI
X
EI
X
EI
X
EI
⋅
=
+
+
−
−
kN
X
79
,
1
3
−
=
-9-
KONTROLA KINEMATYCZNA
1
2
3
3,048
0,642
1,790
1
2
3
1,0000
M
(n)
[kNm]
M
(o)
[m]
1
2
3
-9,144
-9,144
-1,984
-0,058
-0,058
-1,984
-7,160
-7,160
1
2
3
1,0000
1,0000
1,0000
1,0000
1,0000
1,0000
N
(o)
[-]
1
2
3
0,333
0,333
0,333
0,333
=
⋅
⋅
⋅
⋅
−
⋅
⋅
⋅
+
⋅
⋅
⋅
−
⋅
⋅
+
⋅
⋅
⋅
+
⋅
⋅
⋅
=
−
]
1
3
2
3
144
,
9
5
,
0
[
1
]
1
3
058
,
0
5
,
0
1
3
984
,
1
5
,
0
[
1
)]
5
,
2
3
3
1
(
)
22
,
0
15
3
1
5
,
0
2
,
0
5
3
1
[(
10
2
,
1
1
1
5
EI
EI
B
ϕ
%
04
,
0
0000008
,
0
001458
,
0
0006982
,
0
002157
,
0
⇒
=
−
−
=
rad
-10-
WYKRESY
M
(n)
[kNm]
1
2
3
-9,144
-9,144
-1,984
-0,058
-0,058
-1,984
-7,160
-3,580
-3,580
-7,160
1
2
3
7,160
7,160
9,144
9,144
-1,984
-0,058
-0,058
-1,984
T
(n)
[kN]
1
2
3
-3,048
-3,048
-3,048
-3,048
0,642
0,642
0,642
0,642
1,737
1,737
1,737
1,737
1,737
1,737
1
2
3
1,737
1,737
1,737
1,737
-3,048
-3,048
-3,048
-3,048
0,642
0,642
0,642
0,642
N
(n)
[kN]
1
2
3
-0,642
-0,642
-0,642
-0,642
-4,838
-4,838
-4,838
-4,838
-0,434
-0,434
-0,434
-0,434
-0,434
-0,434
1
2
3
0,434
0,434
0,434
0,434
0,642
0,642
0,642
0,642
4,838
4,838
4,838
4,838
1
2
3
3,000
3,000
-11-
PRZEMIESZCZENIE POZIOME PUNKTU P
M
(n)
[kNm]
1
2
3
6,0270
6,0270
-2,9460
6,0270
-2,9460
-0,9960
2,7480
2,7480
-1,7634
-1,9500
-1,9500
1
2
3
-1,000
M
(o)
[m]
0
02
,
0
00002052
,
0
09
,
0
]
3
5
,
0
3
8
3
2
3
2
3
3
1
3
996
,
0
5
,
0
3
3
2
3
77
,
2
5
,
0
[
1
)
(
1
2
)
(
)
(
≈
=
=
=
⋅
⋅
⋅
⋅
⋅
−
⋅
⋅
∑
⋅
∫
⋅
−
⋅
⋅
⋅
⋅
=
=
mm
m
EI
EI
dx
EI
M
M
P
U
o
n
-12-
Wyszukiwarka
Podobne podstrony:
proj151
proj156 id 397568 Nieznany
proj155
proj158 id 397570 Nieznany
proj159
proj157 id 397569 Nieznany
proj154 id 397567 Nieznany
proj153
proj152
proj151
proj153
więcej podobnych podstron