„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
MINISTERSTWO EDUKACJI
NARODOWEJ
Ryszard Szpunar
Stosowanie technologii GPS w pomiarach geodezyjnych
311[10].Z1.11
Poradnik dla ucznia
Wydawca
Instytut Technologii Eksploatacji – Państwowy Instytut Badawczy
Radom 2007
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
1
Recenzenci:
mgr inż. Marek Rosa
mgr inż. Adam Bielawa
Opracowanie redakcyjne:
dr inż. Ryszard Szpunar
Konsultacja:
mgr Małgorzata Sienna
Poradnik stanowi obudowę dydaktyczną programu jednostki modułowej 311[10].Z1.11
„Stosowanie technologii GPS w pomiarach geodezyjnych”, zawartego w modułowym
programie nauczania dla zawodu technik geodeta.
Wydawca
Instytut Technologii Eksploatacji – Państwowy Instytut Badawczy, Radom 2007

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
2
SPIS TREŚCI
1. Wprowadzenie
3
2. Wymagania wstępne
5
3. Cele kształcenia
6
4. Materiał nauczania
7
4.1. Podstawowe pojęcia z astronomii geodezyjnej
7
4.1.1. Materiał nauczania
7
4.1.2. Pytania sprawdzające
10
4.1.3. Ćwiczenia
11
4.1.4. Sprawdzian postępów
11
4.2. Kształt i rozmiar Ziemi
12
4.2.1. Materiał nauczania
12
4.2.2. Pytania sprawdzające
16
4.2.3. Ćwiczenia
17
4.2.4. Sprawdzian postępów
17
4.3. Satelitarne systemy pozycyjne
18
4.3.1. Materiał nauczania
18
4.3.2. Pytania sprawdzające
36
4.3.3. Ćwiczenia
37
4.3.4. Sprawdzian postępów
40
4.4. Wysokości elipsoidalne – niwelacja satelitarna
41
4.4.1. Materiał nauczania
41
4.4.2. Pytania sprawdzające
41
4.4.3. Ćwiczenia
42
4.4.4. Sprawdzian postępów
42
4.5. Aktywna Sieć Geodezyjna (ASG)
43
4.5.1. Materiał nauczania
43
4.5.2. Pytania sprawdzające
43
4.5.3. Ćwiczenia
44
4.5.4. Sprawdzian postępów
44
5. Sprawdzian osiągnięć
45
6. Literatura
50

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
3
1. WPROWADZENIE
Poradnik będzie pomocny w przyswajaniu wiedzy o korzystaniu ze Stosowania
technologii GPS w pomiarach geodezyjnych.
W poradniku zamieszczono:
–
wymagania wstępne – wykaz umiejętności, jakie powinieneś mieć już ukształtowane,
abyś bez problemów mógł korzystać z poradnika,
–
cele kształcenia – wykaz umiejętności, jakie ukształtujesz podczas pracy z poradnikiem,
–
materiał nauczania – wiadomości teoretyczne niezbędne do opanowania treści jednostki
modułowej,
–
zestaw pytań, abyś mógł sprawdzić, czy już opanowałeś określone treści,
–
ć
wiczenia, które pomogą Ci zweryfikować wiadomości teoretyczne oraz ukształtować
umiejętności praktyczne,
–
sprawdzian postępów,
–
sprawdzian osiągnięć, przykładowy zestaw zadań. Zaliczenie testu potwierdzi
opanowanie materiału całej jednostki modułowej,
–
literaturę.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
4
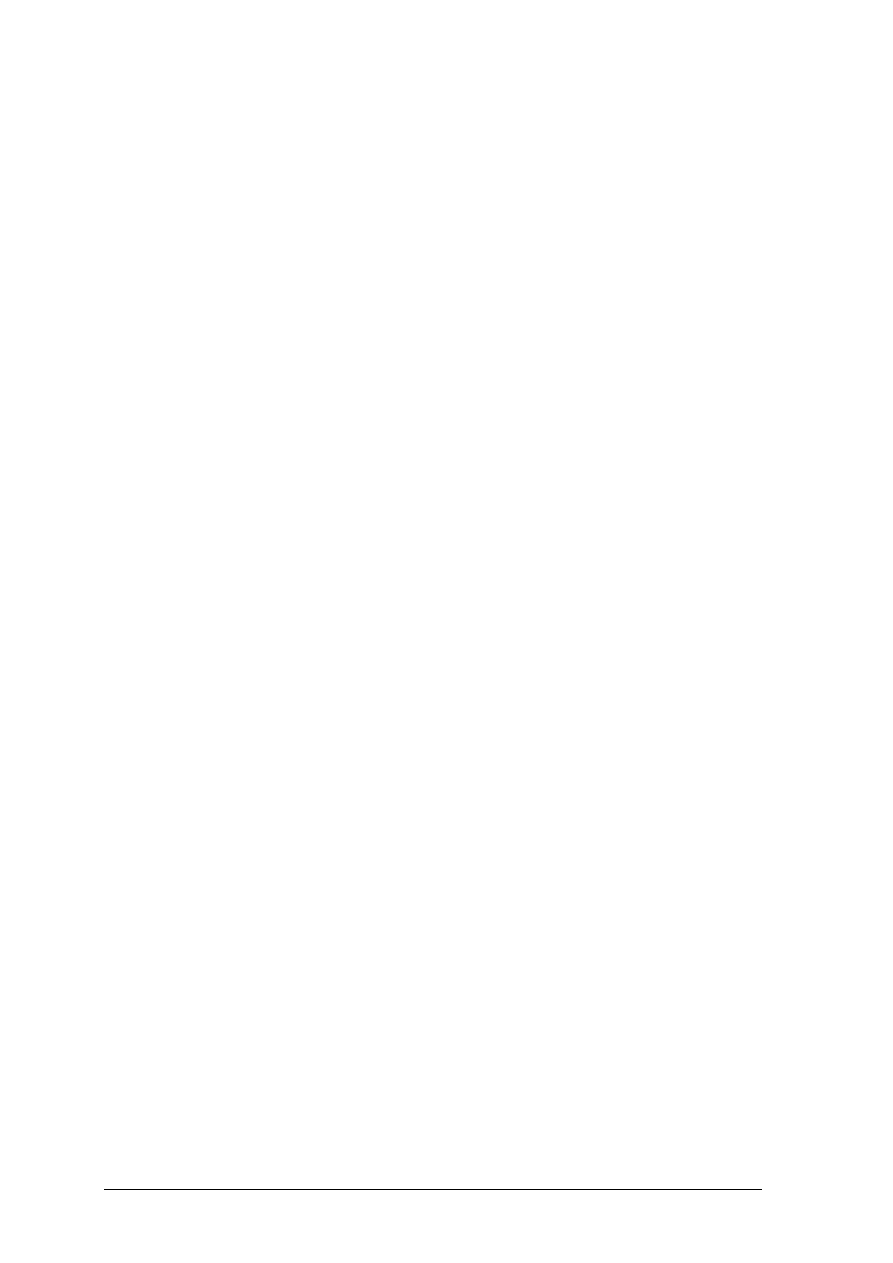
Schemat układu jednostek modułowych
311[10].Z1
Mapa sytuacyjno-wysokościowa
311[10].Z1.02
Opracowywanie mapy sytuacyjnej
311[10].Z1.03
Aktualizacja mapy sytuacyjnej na
podstawie pomiarów terenowych
311[10].Z1.04
Opracowywanie przekrojów
podłużnych i poprzecznych
311[10].Z1.05
Wykonywanie mapy warstwicowej
311[10].Z1.06
Stosowanie rachunku współrzędnych
w obliczeniach geodezyjnych
311[10].Z1.07
Wykorzystywanie teorii błędów do
opracowywania pomiarów
geodezyjnych
311[10].Z1.10
Sporządzenie mapy
sytuacyjno-wysokościowej na
podstawie pomiarów terenowych
311[10].Z1.09
Wykonywanie pomiarów sytuacyjnych
i sytuacyjno-wysokościowych
311[10].Z1.08
Projektowanie, pomiar i wyrównanie
szczegółowej osnowy geodezyjnej
311[10].Z1.11
Stosowanie technologii GPS
w pomiarach geodezyjnych
311[10].Z1.01
Stosowanie instrumentów
geodezyjnych

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
5
2. WYMAGANIA WSTĘPNE
Przystępując do realizacji programu jednostki modułowej powinieneś umieć:
–
określać rolę i zadania geodezji i kartografii w działalności gospodarczej,
–
posługiwać się jednostkami miar stosowanymi w geodezji,
–
określać zasady tworzenia odwzorowań kartograficznych,
–
określać cechy i przeznaczenie odwzorowań kartograficznych,
–
posługiwać się instrumentami geodezyjnymi (tachimetrami, niwelatorami),
–
wyrównywać metodą pośredniczącą sieci kątowo-liniowe i niwelacyjne,
–
określać rachunek błędów,
–
określić systemy odniesień przestrzennych obowiązujące w Polsce,
–
wykorzystywać transformacje Helmerta,
–
obliczać współrzędne punktów korzystając z różnych konstrukcji geometrycznych,
–
posługiwać się komputerem oraz Internetem,
–
przestrzegać przepisów bezpieczeństwa i higieny pracy, ochrony przeciwpożarowej oraz
ochrony środowiska,
–
wykreślać mapę sytuacyjno-wysokościową w oprogramowaniu typu CAD.

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
6
3. CELE KSZTAŁCENIA
W wyniku realizacji programu jednostki modułowej powinieneś umieć:
−
scharakteryzować wielkość i kształt ziemi,
−
objaśnić podstawowe pojęcia z zakresu astronomii geodezyjnej,
−
zastosować współrzędne geodezyjne BLH,
−
objaśnić strukturę i zasady funkcjonowania globalnych systemów satelitarnego
pozycjonowania,
−
wykorzystać technologie GPS do realizacji zadań geodezyjnych,
−
zdefiniować niwelację satelitarną.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
7
4. MATERIAŁ NAUCZANIA
4.1. Podstawowe pojęcia z astronomii geodezyjnej
4.1.1. Materiał nauczania
Aby określać położenie gwiazd (lub satelitów) i na podstawie ich obserwacji móc
obliczać naszą pozycję na Ziemi potrzebne jest zbudowanie układów współrzędnych.
Wszystkie te układy współrzędnych tworzymy na tzw. sferze niebieskiej czyli sferze
o nieskończenie wielkim promieniu na której przyjmujemy, że położone są wszystkie
widoczne ciała niebieskie. My, jako obserwatorzy znajdujemy się dokładnie w środku kuli.
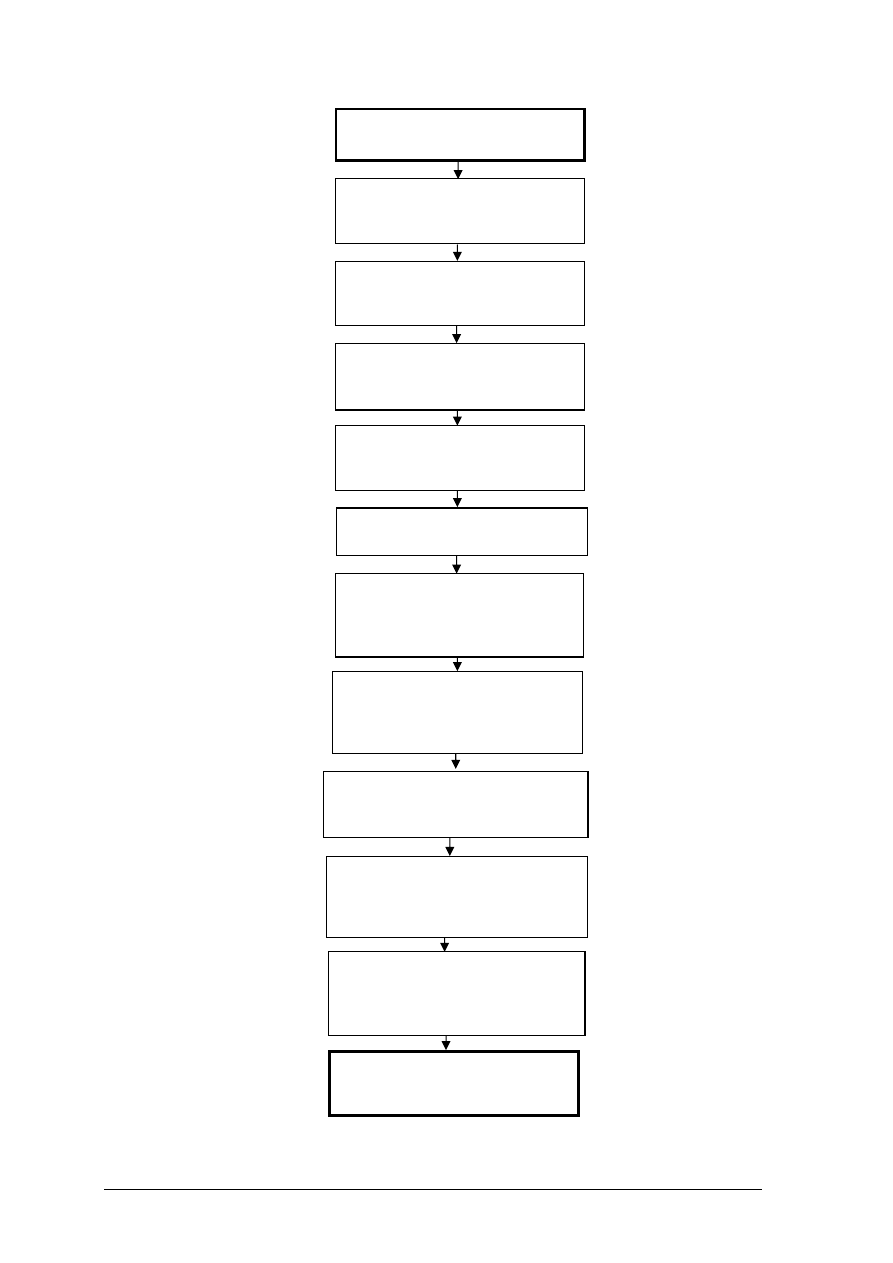
Na sferze niebieskiej, podobnie jak na powierzchni Ziemi definiujemy południki
niebieskie i równoleżniki niebieskie. Największym z równoleżników niebieskich jest
równik niebieski zdefiniowany jako ślad przecięcia płaszczyzny równika ziemskiego i sfery
niebieskiej. Prosta przechodząca przez dwa bieguny ziemskie N i S zwana osią świata
przecina sferę niebieską w punktach P
N
i P
S
, czyli północy niebieskiej i południa
niebieskiego.
równik n
iebieski
P
N
P
S
p
o
łu
d
n
ik
n
ie
b
ie
sk
i
o
ś
ś
w
ia
ta
Rys. 1. Południki i równoleżniki niebieskie
Nowym pojęciem, jakie musimy wprowadzić jest płaszczyzna horyzontu, czyli
płaszczyzna zawierająca limbus spoziomowanego instrumentu – prostopadła do kierunku linii
pionu w miejscu obserwacji. O ile płaszczyzna równika niebieskiego jest jedna, to
płaszczyzna horyzontu instrumentu jest charakterystyczna dla punktu. Prosta prostopadła do
płaszczyzny horyzontu przetnie sferę niebieską w punktach Zenitu (Z) i Nadiru (Nd). Prostą
tą możemy utożsamić z pionową osią obrotu instrumentu. Punkt zenitu znajduje się nad
płaszczyzną horyzontu natomiast nadir znajduje się po przeciwnej stronie sfery niebieskiej,
czyli w odległości zenitalnej 180
o
. Linie równoległe do horyzontu są nazywane
almukantaratami. Natomiast linie prostopadłe do płaszczyzny horyzontu nazywane są
wertykałami.
Pojęcia te umożliwiają zdefiniowanie następujących układów współrzędnych:
Z
Nd
płas
zczy
zn
a
h
ory
zo
ntu
w
e
rt
yk
a
ł
almukantarat

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
8
Układy współrzędnych
Układ horyzontalny
Oś pionowa układu horyzontalnego wyznacza w przecięciu ze sferą niebieską dwa
charakterystyczne punkty Zenit i Nadir. W układzie horyzontalnym występują dwie
charakterystyczne płaszczyzny, pierwsza nosi nazwę płaszczyzny południka miejscowego
(zależy od położenia Z na sferze niebieskiej a zatem od miejsca obserwacji) i wyznaczają ją
trzy punkty Zenit (Z), Północ Niebieska (P
N
) i środek Ziemi (O). Drugą charakterystyczną
płaszczyzną jest płaszczyzna horyzontu. Jest ona prostopadła do osi Zenit - Nadir i zawiera
ś
rodek świata.
W układzie tym występują dwie współrzędne wyznaczające jednoznacznie położenie
gwiazdy na sferze niebieskiej. Są to:
−
azymut gwiazdy (A) liczony jako kąt dwuścienny między płaszczyzną południka
miejscowego a południkiem przechodzącym przez gwiazdę (zgodnie z ruchem
wskazówek zegara) oraz
−
wysokość (h) liczona jako kąt między płaszczyzną horyzontu a promieniem wodzącym
wyprowadzonym ze środka Ziemi do gwiazdy. Inną stosowaną zamiennie z wysokością
współrzędną jest odległość zenitalna (z) określona jako odległość kątowa promienia
gwiazdy od Zenitu z = 90
°
- h.
Azymut gwiazdy może zmieniać się w zakresie od 0
°
przez 180
°
w punkcie S do 360
°
.
Wysokość gwiazdy h zawiera się między 90
°
w zenicie do -90
°
w nadirze. Odległość
zenitalna z zawiera się w granicach od 0
°
w zenicie do 180
°
w nadirze. Na płaszczyźnie
horyzontu wyróżnia się cztery charakterystyczne punkty. Punkt północy i południa (N i S)
znajdujące się na przecięciu płaszczyzny horyzontu z płaszczyzną południka miejscowego.
Punkty wschodu i zachodu (E i W) znajdują się na przecięciu tzw. I wertykału z płaszczyzną
horyzontu, czyli na azymutach odpowiednio 90
°
i 270
°
. Układ ten, choć bardzo wygodny do
zdefiniowania ma swoją istotną niedogodność, jest on, bowiem zależny od pozycji
obserwatora oraz czasu obserwacji, zatem nie nadaje się do katalogowania gwiazd.
Układ równikowy ekwinokcjalny
Układ ten związany jest z płaszczyzną równika niebieskiego (analogicznie jak równik
ziemski z tym że na sferze niebieskiej) i osią świata (łączącą dwa bieguny). Układ ten jest
podobnie skonstruowany jak ziemski układ współrzędnych
ϕ
,
λ
. Wyróżniamy tu:
−
deklinację
δδδδ
opisywaną jako kąt między płaszczyzną równika niebieskiego i promieniem
wodzącym gwiazdy G (analogia do szerokości geograficznej
ϕ
) Deklinacja gwiazdy nie
jest współrzędną zależną od ruchu dobowego gwiazdy, w swym ruchu gwiazda porusza
się bowiem po równoleżniku niebieskim (skoro pł. równoleżnika jest równoległa do pł.
równika to deklinacja nie zmienia się). Deklinację mierzy się w
stopniach a jej wartość
zmienia się od 90
°
(biegun północny) przez 0
°
(równik niebieski) do -90
°
(biegun
południowy).
Drugą współrzędna mierzymy po równiku niebieskim a jest nią.
−
rektascensja
αααα
. Za początek liczenia tej współrzędnej przyjęto punkt równonocy
wiosennej
ϒ
(tzw. punkt Barana) tj. punkt przecięcia płaszczyzny równika niebieskiego
płaszczyzną ekliptyki (pozornego ruchu Słońca). W tym punkcie Słońce przechodzi
z półkuli południowej na północną. Zatem rektascensją nazywamy kąt dwuścienny
zawarty między południkiem niebieskim przechodzącym przez punkt Barana
a południkiem danej gwiazdy. Rektascensję mierzymy w płaszczyźnie równika
niebieskiego od południka punktu Barana w kierunku przeciwnym do ruchu wskazówek
zegara. Rektascensje wygodnie jest liczyć w mierze godzinnej (h, m, s) wzrasta ona
z zachodu na wschód od 0
h
w punkcie równonocy do 24
h
. Zamianę miary godzinnej na
miarę stopniową można dokonać z zależności:
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
9
Punkt równonocy wiosennej uczestniczy razem z całą sferą niebieską w ruchu dobowym
sfery niebieskiej. Nie zmienia się zatem jego położenie wśród gwiazd, zatem i nie zmienia się
wartość rektanscensji. Ten układ równań służy do zestawiania pozycji gwiazd w specjalnych
katalogach gwiazd oraz rocznikach astronomicznych.
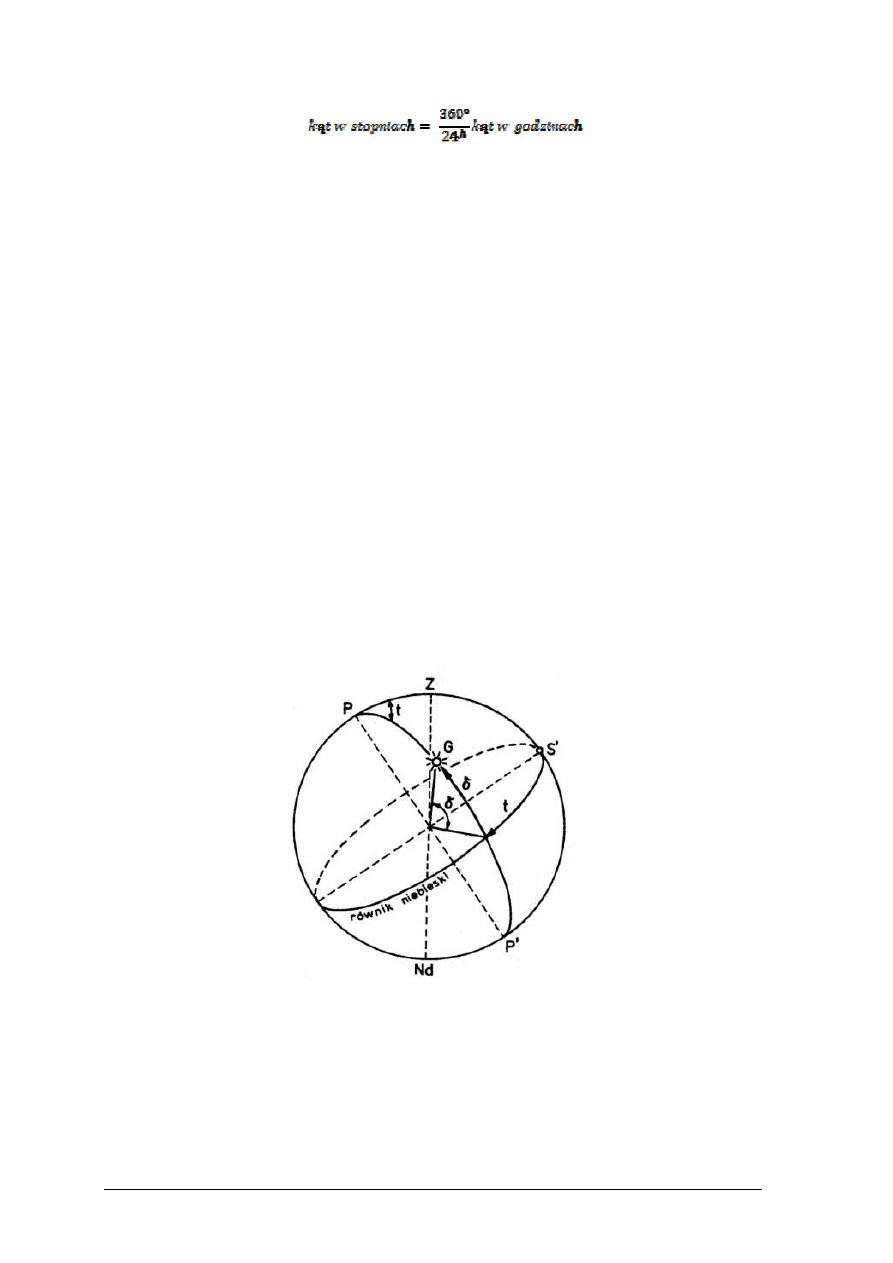
Układ równikowy godzinny
Podstawowymi płaszczyznami w tym układzie są płaszczyzna równika niebieskiego oraz
płaszczyzna południka miejscowego. Jedną ze współrzędnych jest definiowana identycznie
jak w poprzednim układzie
−
deklinacja
δδδδ
.
Drugą współrzędną jest:
−
kąt godzinny t zawarty między płaszczyzną południka miejscowego a południkiem danej
gwiazdy. Kąt godzinny mierzy się po równiku począwszy od południowej części
południka miejscowego PNZS w kierunku zgodnym z ruchem wskazówek zegara od 0 h
do 24h. O ile deklinacja jak poprzednio jest wartością stałą o tyle wartość kąta
godzinnego wzrasta proporcjonalnie do upływu czasu zgodnie z pozornym ruchem
gwiazdy po równoleżniku niebieskim. Zmiana tego kąta o 24 h odpowiada jednemu
obrotowi Ziemi dokoła własnej osi i stanowi jednostkę czasu zwaną dobą gwiazdową.
−
Za pomocą kąta godzinnego definiowany jest również czas gwiazdowy miejscowy
oznaczany jako S. Wyraża się go prostym wzorem
Pojęcie czasu gwiazdowego definiowane w powyższy sposób jest podstawowym
pojęciem w astronomii. Jest to zarazem związek transformujący układ równikowy godzinny
do ekwinokcjalnego.
Rys. 2. Układ równikowy godzinny
Mierzenie czasu
Przedział czasu pomiędzy kolejnymi i jednoimiennymi zgórowaniami środka widzialnej
tarczy słonecznej na tym samym południku nosi nazwę prawdziwej doby słonecznej.
S =
αααα
+ t
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
10
Prawdziwym czasem słonecznym m
s
nazywamy czas, który upłynął od momentu dolnego
górowania słońca (prawdziwa północ) do dowolnego jego położenia. Czas ten wyrażony jest
poprzez ułamek prawdziwej doby słonecznej:
Punkt, który porusza się ruchem jednostajnym wzdłuż równika w ten sposób, że jego
rektascensja jest równa średniej długości prawdziwego Słońca nosi nazwę średniego Słońca
równikowego. Zatem średnią dobą słoneczną nazywamy przedział czasu pomiędzy dwoma
kolejnymi jednoimiennymi górowaniami średniego Słońca równikowego na tym samym
południku.
Czas od momentu dolnego górowania średniego Słońca równikowego do dowolnego
położenia wyrażony w ułamku średniej doby słonecznej, nosi nazwę średniego czasu
słonecznego m
śr
Czas gwiazdowy, prawdziwy czas słoneczny oraz średni czas słoneczny dowolnego
południka nosi nazwę odpowiedniego czasu lokalnego tego południka.
Ś
redni lokalny czas słoneczny południka przechodzącego przez obserwatorium
Greenwich pod Londynem nosi nazwę czasu uniwersalnego.
Z praktycznych względów Ziemię podzielono na 24 piętnastostopniowe strefy. Dla
każdej strefy wprowadzono czas strefowy różniący się od sąsiednich stref o godzinę.
W Polsce w porze zimowej obowiązuje czas środkowoeuropejski (dla południka 15
°
-
o godzinę późniejszy od czasu uniwersalnego). Wiosną (aż do jesieni) ze względów
ekonomicznych następuje zmiana czasu na wschodnioeuropejski (czas dla południka 30
°
)
późniejszy o dwie godziny od czasu uniwersalnego.
Umowna linia na mapie stref czasowych, przebiegająca głównie wzdłuż południka 180
stopni (występują niewielkie odchylenia w przypadku miejsc zamieszkanych przez ludzi),
przy której przekraczaniu zmienia się datę nazywa się linią zmiany daty. Na wschód od niej
data jest o jedną dobę mniejsza niż na zachód. Przekraczając linię zmiany daty ze wschodu na
zachód należy dodać jedna dobę, natomiast przy przekroczeniu z zachodu na wschód drugi
raz wprowadzić tę samą datę.
4.1.2 Pytania sprawdzające
Odpowiadając na pytania, sprawdzisz czy jesteś przygotowany do wykonania ćwiczeń.
1.
Co to jest wertykał?
2.
Co to jest zenit?
3.
Co to jest oś świata?
4.
Co to jest równik niebieski?
5.
Jakie znasz układy współrzędnych astronomicznych?
6.
Co to jest rektascensja?
7.
Co to jest deklinacja?
8.
Co to jest czas gwiazdowy?
9.
Co to jest czas średni słoneczny?
10.
Co to jest czas strefowy?
11.
Co to jest linia zmiany daty?
12.
Co to jest czas uniwersalny?

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
11
4.1.3. Ćwiczenia
Ćwiczenie 1
Wykonaj obliczenie różnicy czasów strefowych dla różnych miast na świecie (dane
podaje nauczyciel).
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1)
zapoznać się z rozdziałem 4.1,
2)
określić różnicę długości geograficznych zadanych miast,
3)
obliczyć różnicę czasu dla zadanych stref czasowych.
Wyposażenie stanowiska pracy:
−
atlas geograficzny,
−
długopis.
4.1.4 Sprawdzian postępów
Czy potrafisz:
Tak
Nie
1)
zdefiniować południki niebieskie?
2)
zdefiniować równoleżniki niebieskie?
3)
określić prostą przechodzącą przez punkty N i S?
4)
wykonać obliczenia czasowe dla wybranych miejscowości?
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
12
4.2. Kształt i rozmiar Ziemi
4.2.1. Materiał nauczania
Powierzchnie ekwipotencjalne - geoida
Aby wyznaczyć pozycję (położenie) punktu za pomocą globalnego systemu satelitarnego
GPS musimy zdefiniować globalny (obejmujący całą Ziemię) układ odniesienia. Aby to
zrobić należy najpierw określić kształt ziemi.
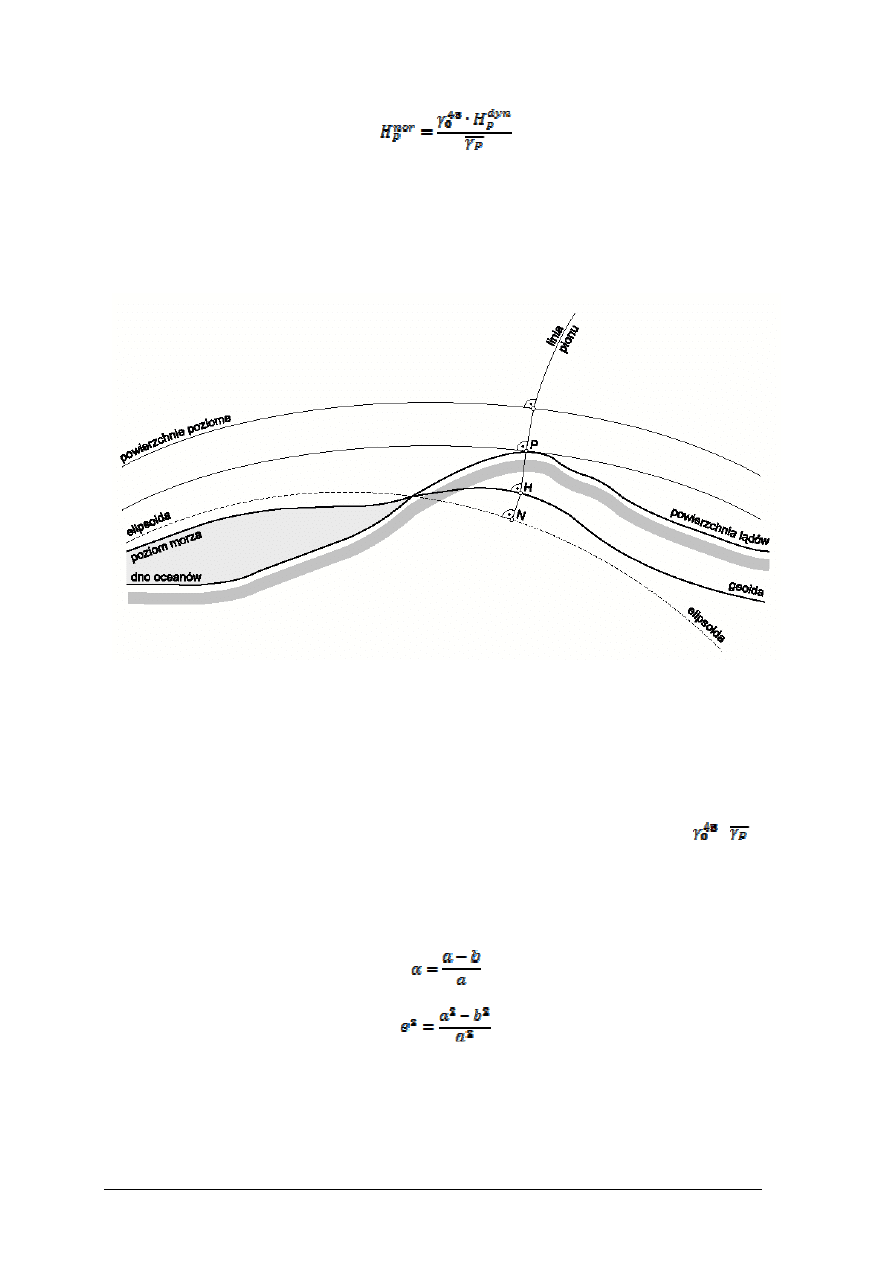
Fizyczna powierzchnia Ziemi ma kształt na tyle nieregularny i skomplikowany, że
opisanie jej za pomocą matematycznego wzoru jest niemożliwe. Kształt ten należy, więc
opisać poprzez porównanie do innych mniej skomplikowanych kształtów. Ponad 70%
powierzchni Ziemi pokrywają morza i oceany, których powierzchnia przyjmuje kształt zwany
geoidą, więc figura ta stanowi reprezentatywne przybliżenie kształtu ziemi.
Geoidą nazywamy ciągłą i gładką powierzchnię zamkniętą zawierającą swobodny
poziom mórz otwartych, znajdujących się w absolutnym spokoju, przy założeniu idealnych
warunków atmosferycznych oraz jednakowym składzie chemicznym, rozciągniętą pod lądami
wirującej Ziemi, gdyby można było je tam wpuścić.
Kształt geoidy determinowany jest, zatem poprzez siłę ciężkości (wypadkową siły
grawitacyjnej – przyciągania mas Ziemi, oraz siły odśrodkowej spowodowanej obrotem
Ziemi wokół własnej osi), która działa na morza i oceany w założonych „idealnych”
warunkach. Powierzchnie takie, które w każdym swoim punkcie mają stały potencjał siły
ciężkości nazywamy powierzchniami ekwipotencjalnymi lub poziomymi, i możemy opisać
wzorem:
W = const.
gdzie – W – jest potencjałem siły ciężkości.
Równanie to opisuję rodzinę powierzchni, wśród których jedna, pokrywająca się
„idealnym” poziomem mórz otwartych to właśnie geoida, którą opisujemy równaniem:
W
0
= const.
Kierunek linii pionu, określony przez wektor przyśpieszenia siły ciężkości, jest
w każdym punkcie prostopadły do powierzchni ekwipotencjalnych (poziomych).
Siła ciężkości, za pomocą, której możemy określić powierzchnie poziome (a wśród nich
geoidę) oraz kierunek linii pionu (w praktyce za pomocą pionu sznurkowego, libeli)
umożliwia również określenie pojęcia wysokości jako odległości między powierzchniami
ekwipotencjalnymi. Rozważając pracę w polu potencjalnym możemy zapisać:
Praca = Siła · Przesunięcie
Dla pola potencjalnego Ziemi, gdzie siłą będzie siłą ciężkości, otrzymamy:
dW = g · dh
gdzie dh – to wektor elementarnego przesunięcie o kierunku i zwrocie wektora przyspieszenia
siły ciężkości g między powierzchniami ekwipotencjalnymi między którymi różnica
potencjału wynosi dW. Stąd możemy wyrazić odległość sąsiednich powierzchni
ekwipotencjalnych poprzez różniczką potencjału i przyśpieszenie siły ciężkości:
Okazuje się, że praca w polu potencjalnym siły ciężkości jest równa potencjałowi.
Przemieszczenie punktu z powierzchni ekwipotencjalnej W
0
(geoidy) do powierzchni
ekwipotencjalnej (poziomej) przechodzącej przez punktu na fizycznej powierzchni Ziemi W
P
będzie się wiązało z wykonaniem pracy równej:
∆
W = W
0
– W
P
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
13
a długość odcinka na którym ta praca jest wykonywana – wysokość – zależy od siły
towarzyszącej przemieszczaniu punktu – siły ciężkości. Dla dowolnego punktu P można
zapisać:
Różnicę potencjałów oznaczamy jako liczbę geopotencjalną C:
C
P
= W
0
- W
P
Liczba ta wyraża prace w polu potencjalnym, niezależną od drogi, i jest wykorzystywana
do definicji wysokości. Jeżeli za wysokość przyjmiemy najkrótszą drogę, na jakiej wykonano
pracę określoną przez liczbę geopotencjalną to aby ją obliczyć należy liczbę C podzielić przez
przyspieszenie siły ciężkości właściwą dla drogi 0-P wzdłuż linii pionu.
Systemy wysokości
Sposób wyznaczenia wartości g reprezentatywnej dla drogi 0-P wiąże się z pojęciem
systemów wysokości. Wyróżniamy cztery systemy wysokości, różniące się przyjętą
wartością g.
1.
Wysokość geopotencialna – jeżeli za wartość przyspieszenia siły ciężkości przymniemy
stałą przybliżoną wartość równą 10 m·s
-2
. Wysokość geopotencjalna punktu P wyniesie:
2.
Wysokość dynamiczna – jeżeli za wartość przyspieszenia siły ciężkości przyjmiemy stałą
wartość przyjętą dla pewnego modelowego rozkładu masy w globie Ziemskim dla punktu
położonego na poziomie morza na szerokości 45° -
:
3.
Wysokość ortometryczna – określa wzniesienie punktu ponad geoidę mierzone wzdłuż
rzeczywistej linii pionu. Określamy ją dzieląc liczbę geopotencjalną przez przeciętną
wartość rzeczywistego przyspieszenia siły ciężkości wzdłuż linii pionu od geoidy do
punktu na fizycznej powierzchni Ziemi –
:
4.
W praktyce nie możliwe jest wyznaczenie przeciętnej wartości przyspieszenia siły
ciężkości bez założenia hipotetycznego rozkładu gęstości mas Ziemi wzdłuż linii pionu
0-P.
5.
Wysokość normalna – jeżeli za wartość przyspieszenia przyjmiemy przeciętną wartość
przyspieszenia wzdłuż linii pionu dla pewnego przyjętego modelu przyśpieszenia siły
ciężkości (przyśpieszenia normalnego) -
:
Zastąpienie przyspieszenia rzeczywistego (wysokości ortometryczne) przyspieszeniem
normalnym (modelowym) powoduje, że wysokości normalne nie odnoszą się do geoidy, ale
do powierzchni zwanej quasigeoidą, nie będącą powierzchnią ekwipotencjalną.
Przeliczanie wysokości między różnymi systemami możliwe jest gdy znamy
odpowiednie wartości przyśpieszenia. Stałość liczby geopotencjalnej w każdym systemie
umożliwia napisanie ogólnej zależności:
Na jej podstawie można powiązać wysokość przedstawioną w dwóch dowolnych
systemach, np. dla wysokości normalnej i dynamicznej mamy zależność:
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
14
Pojęcie geoidy pozwoliło nam opisać kształt Ziemi, jako powierzchni ekwipotencjalnej.
Opisanie geoidy jako figury geometrycznej jest jednak niemożliwe, gdyż nadal jest to
powierzchnia bardzo skomplikowana. Geometryczny kształt geoidy opisuje się porównując ją
z inną powierzchnią o zbliżonym a zarazem niezbyt skomplikowanym kształcie. Za taką
powierzchnię przyjmuję się elipsoidę obrotową o niewielkim spłaszczeniu, której
powierzchnia przebiega w jak najbliższym sąsiedztwie geoidy (rys. 1).
Rys. 3. Powierzchnie odniesienia stosowane w geodezji [1]
Elipsoida obrotowa – współrzędne geodezyjne
Elipsoida obrotowa, jako przybliżenie geometryczne geoidy umożliwia opisanie
powierzchni Ziemi funkcją analityczną, co pozwala rozwiązywać podstawowe zadania
geodezyjne na jej powierzchni: określać współrzędne, obliczać odległości, pola, kąty oraz
odwzorowywać ją na płaszczyznę przy tworzeniu map. Dodatkowo dodając elipsoidzie masę
(gęstość mas) oraz prędkość kątową wykorzystujemy ją jako model potencjału siły ciężkości.
Model ten jest wykorzystywany np. przy określaniu przyspieszenia normalnego
,
przy
systemach wysokości dynamicznych i normalnych.
Elipsoida obrotowa spłaszczona powstaje przez obrót elipsy dokoła małej osi. Określają
ją dwa stałe niezależne od siebie parametry, którymi mogą być np. półosie a (duża,
równikowa) i b (mała, biegunowa). Często używane są również do opisania kształtu elipsoidy
parametry – spłaszczenia:
oraz pierwszego mimośrodu:
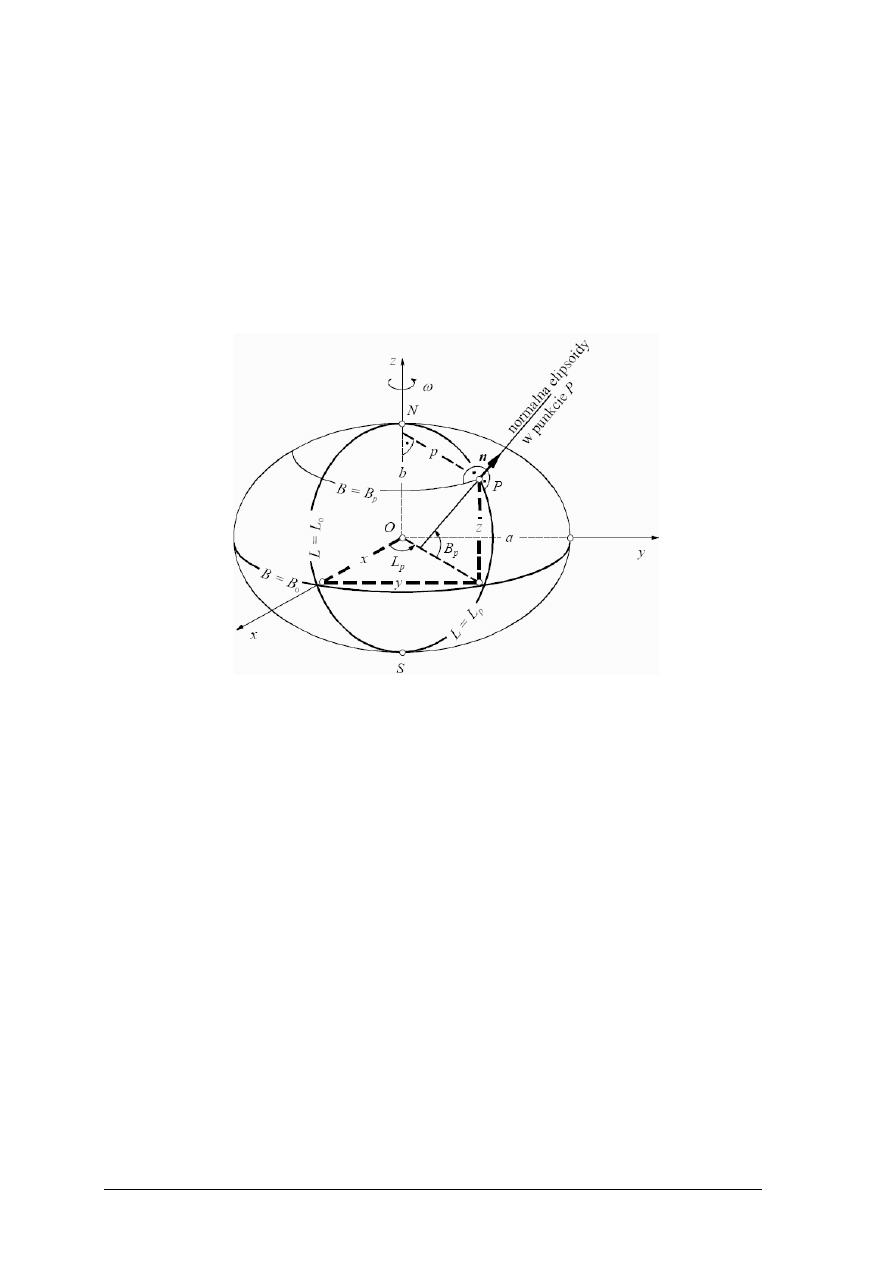
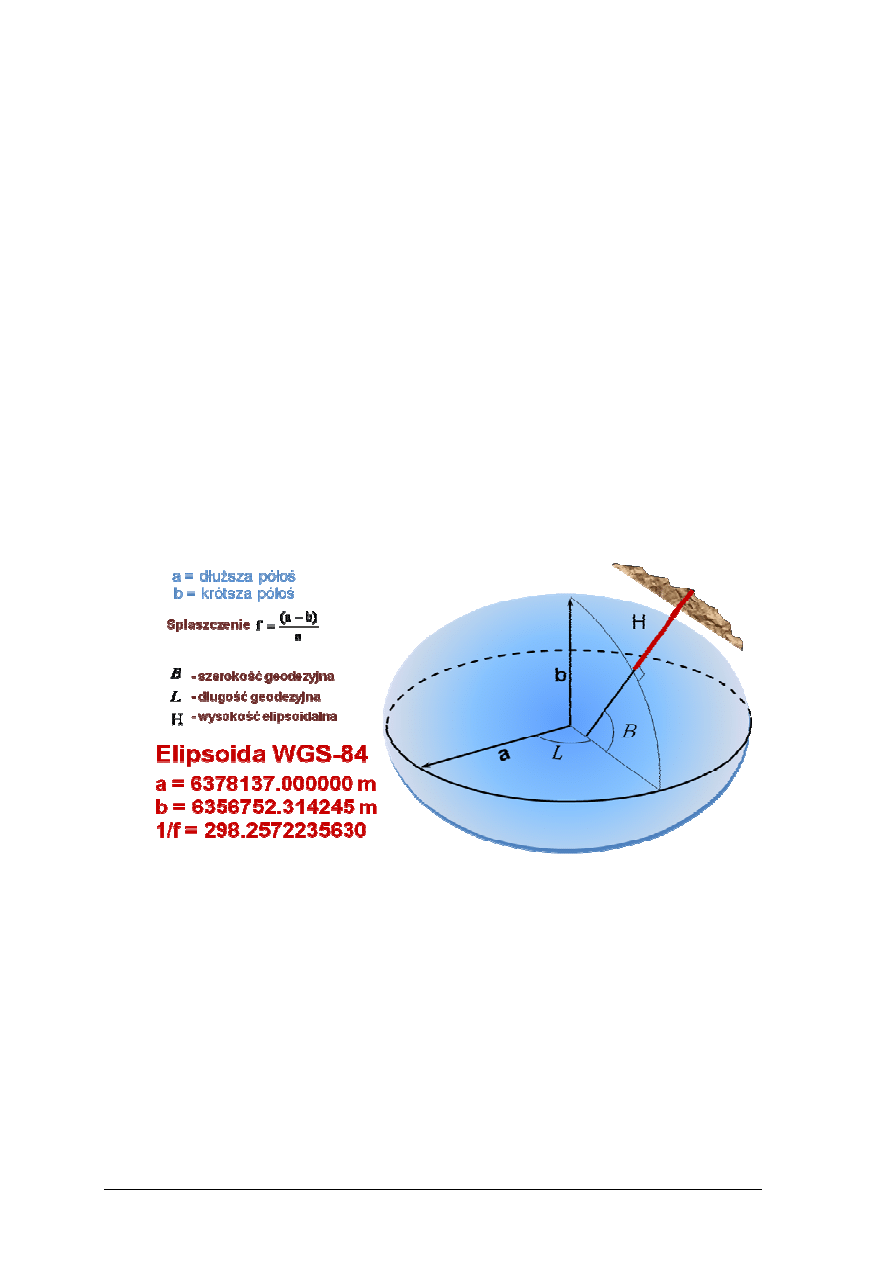
Aby określić położenie punktu na powierzchni elipsoidy obrotowej należy wprowadzić
układ współrzędnych geodezyjnych B,L,H. Układ ten przedstawia rysunek 2.
Szerokość geodezyjna B to kąt, jaki tworzy normalna do elipsoidy z płaszczyzną
równika geodezyjnego. Równik zaś jest kołem powstałym w wyniku przekroju elipsoidy
obrotowej płaszczyzną, do której oś obrotu elipsoidy jest prostopadła i która zawiera środek
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
15
elipsoidy O. Szerokość geodezyjna osiąga wartości o 0° (dla punktu na równiku) do 90°
(punkt na biegunie) oraz może być północna N lub południowa S.
Długość geodezyjna L to kąt dwuścienny pomiędzy płaszczyzną południka
początkowego zawierającego oś Ox i płaszczyzną południka zawierającego punkt P.
Południki geodezyjne (przekroje o kształcie elips) uzyskujemy prowadząc pęk płaszczyzn
przez oś Oz (małą półoś b). Długość geodezyjna osiąga wartości od 0° do 360° lub od 0° do
180° przy rozróżnieniu długości wschodniej E i zachodniej W.
Wysokość elipsoidalna H jest wysokością punktu nad elipsoidą. Wszystkim punktom
geoidy stykającym się z powierzchnią elipsoidy przypisane zostały zerowe wartości H,
natomiast punktom leżącym na zewnątrz elipsoidy dodatnie wartości odległości. Punkty
leżące wewnątrz elipsoidy otrzymują ujemne wartości odległości H.
Rys. 4. Współrzędne geodezyjne i prostokątne [1]
Układ współrzędnych prostokątnych xyz jest układem prawoskrętnym, w który początek
umieszczono w środku elipsoidy, oś oz pokrywa się z małą osią elipsoidy i zorientujemy ją
dodatnio w kierunku bieguna północnego. Oś x leżąc w płaszczyźnie równika przechodzi
przez punkt elipsoidy o zerowych wartościach szerokości B i długości L. Natomiast oś y leży
w płaszczyźnie równika i w związku z prawoskrętnością układu jest skierowana na wschód.
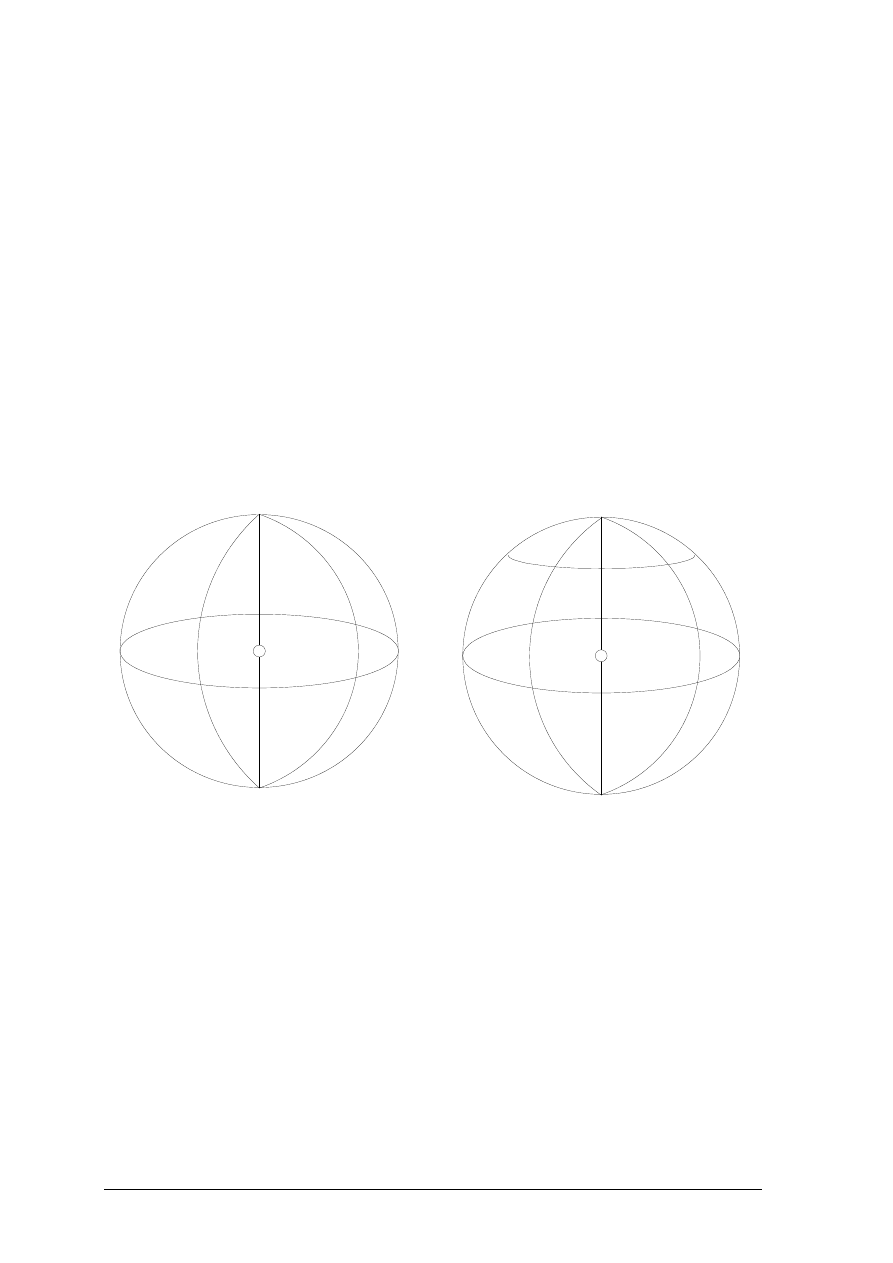
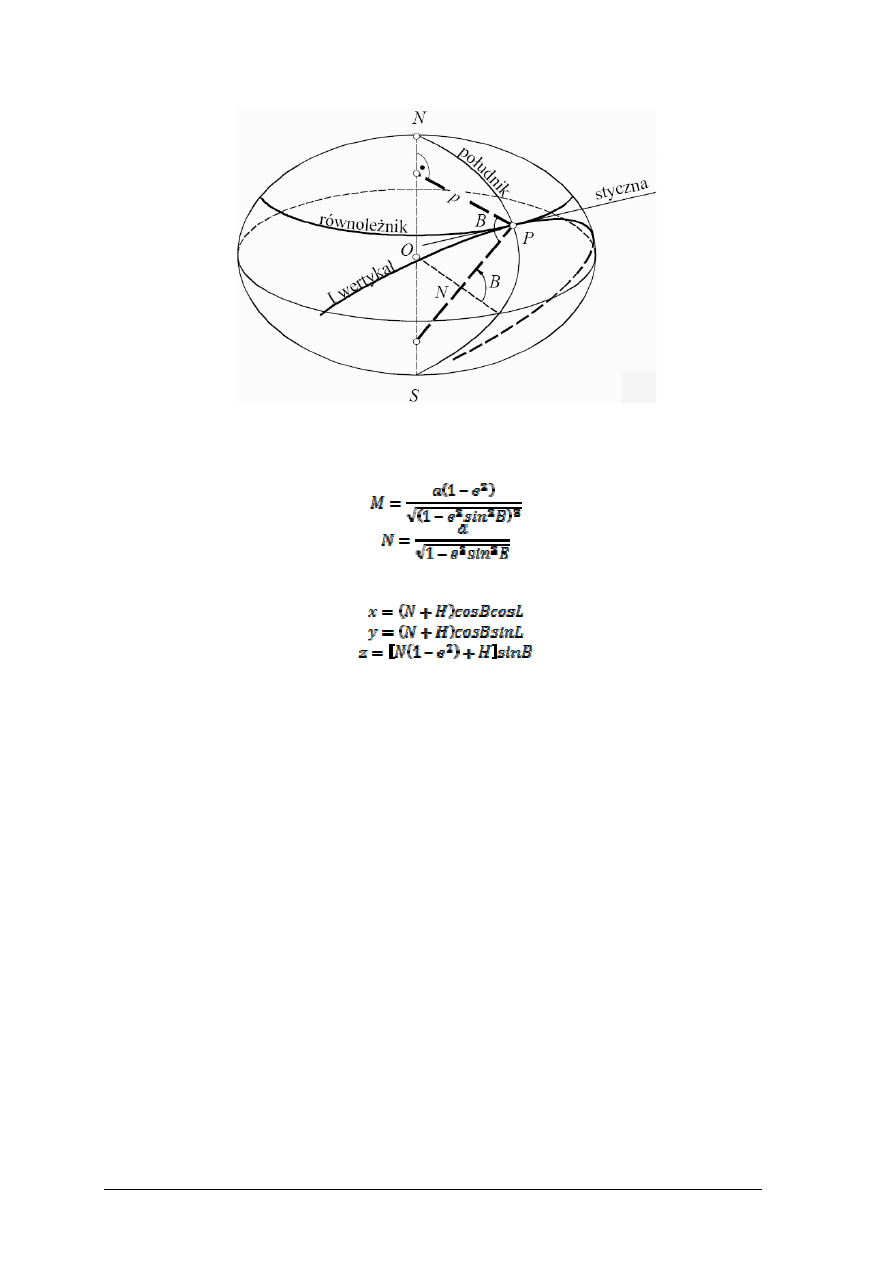
W każdym punkcie na powierzchni elipsoidy możemy znaleźć normalną do powierzchni
elipsoidy n, która leży w płaszczyźnie południka. Prowadząc przez normalną pęk płaszczyzn
otrzymamy płaszczyzny normalne w danym punkcie P, których ślad przecięcia z elipsoidą
obrotową da nam przekroje normalne w danym punkcie. Wśród wszystkich przekroi
wyróżniamy takie dwa, których krzywizny są ekstremalne – przekroje w kierunkach
głównych (rys. 3). Maksymalną krzywiznę (minimalny promień) ma przekrój w kierunku
południka geodezyjnego, którego promień oznaczamy M. Minimalną krzywizną,
a maksymalny promień ma przekrój w kierunku prostopadłym do południka, zwanym
I wertykałem – jego promień oznaczamy symbolem N.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
16
Rys. 5. Promień krzywizny pierwszego wertykału [1]
Do obliczenia promieni krzywizn w kierunkach głównych w danym punkcie P na
powierzchni elipsoidy służą wzory:
Znając współrzędne geodezyjne punktu B i L oraz wysokość elipsoidalną punktu H
można znaleźć współrzędne prostokątne geocentryczne punktu P na podstawie wzorów:
Odwrotne przeliczenie wymaga postępowania iteracyjnego.
Na podstawie obowiązujących w Polsce przepisów (instrukcja O-1/O-2) przy
wykonywaniu prac geodezyjnych przyjmujemy jako powierzchnię odniesienia elipsoidę
obrotową GRS 80 (Geodetic Reference System 1980) o parametrach:
a.
Promień równikowy a=6 317 137 m,
b.
Spłaszczenie geometryczne α=1/298,257222101
Układ wysokości tworzą wysokości normalne odniesione do średniego poziomu morza
Bałtyckiego, wyznaczone dla mareografu w Kronsztadzie.
Jako powierzchnia odniesienia dla globalnego systemu GPS wykorzystywana jest
elipsoida obrotowa WGS 84 (World Geodetic System 1984), która praktycznie kształtem nie
różni się od elipsoidy GRS 80.
4.2.2. Pytania sprawdzające
Odpowiadając na pytania, sprawdzisz, czy jesteś przygotowany do wykonania ćwiczeń.
1.
Co to jest geoida?
2.
Co to jest powierzchnia ekwipotencjalna?
3.
Co to jest wysokość?
4.
Co to jest wysokość ortometryczna?
5.
Co to jest wysokość normalna?
6.
Co to jest wysokość dynamiczna?
7.
Co to są współrzędne geodezyjne?

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
17
4.2.3. Ćwiczenia
Ćwiczenie 1
Wykonaj obliczenie promieni krzywizn w południku i w I wertykale dla zadanych
współrzędnych geodezyjnych BLH.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1)
zapoznać się z rozdziałem 4.2,
2)
obliczyć różnicę wartości promieni krzywizn stosując odpowiednie wzory.
Wyposażenie stanowiska pracy:
−
kalkulator,
−
długopis.
Ćwiczenie 2
Wykonaj obliczenie współrzędnych geocentrycznych XYZ mając dane współrzędne
geodezyjne BLH.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1)
zapoznać się z rozdziałem 4.2,
2)
obliczyć wartości współrzędnych XYZ stosując odpowiednie wzory.
Wyposażenie stanowiska pracy:
−
kalkulator,
−
długopis.
4.2.4. Sprawdzian postępów
Czy potrafisz:
Tak
Nie
1)
zdefiniować pojęcie geoidy?
2)
określić kształt geoidy?
3)
zdefiniować system wysokości?
4)
określić współrzędne geodezyjne?
5)
wyznaczyć pozycję punktu za pomocą globalnego systemu
satelitarnego?
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
18
4.3. Satelitarne systemy pozycyjne
4.3.1. Materiał nauczania
Prawa przyrody rządzące ruchem sztucznych satelitów Ziemi
Nauka, która zajmuje się badaniem ruchu ciał niebieskich odbywającego się pod
wpływem działania sił ciążenia nazywa się mechaniką nieba. Za początek rozwoju tej nauki
uważa się odkrycia przez Izaaka Newtona (1642-1727) praw dynamiki oraz prawa
powszechnego ciążenia.
1.
Jeśli na ciało nie działa żadna siła lub siły działające równoważą się, to ciało pozostaje
w spoczynku lub porusza się ruchem jednostajnym prostoliniowym.
(Philosophiae Naturalis Principia Mathematica, 1726 edition).
2.
Jeśli siły działające na ciało nie równoważą się (czyli siła wypadkowa jest różna od zera),
to ciało porusza się z przyspieszeniem wprost proporcjonalnym do siły wypadkowej.
3.
Oddziaływania ciał są zawsze wzajemne. Siły wzajemnego oddziaływania dwóch ciał
mają takie same wartości, taki sam kierunek, przeciwne zwroty i różne punkty
przyłożenia (każda działa na inne ciało).
Prawo powszechnego ciążenia:
Siła działająca między każdymi dwoma punktami materialnymi o masach m1 i m
2
znajdującymi się w odległości r jest siłą przyciągającą, skierowaną wzdłuż prostej łączącej te
punkty.
Iloczyn stałej grawitacji (stałej Cavendisha) i masy ciała dla Ziemi wynosi:
µ
=GM=398600.4356 [km
3
/s
2
]
Prawa te stanowią podstawę odkrytych przez Jana Keplera (1571-1630) trzech praw
rządzących ruchem planet wokół Słońca:
1.
Każda planeta porusza się po orbicie eliptycznej. W jednym z ognisk orbity znajduje się
Słońce. W ogólności, jeżeli będziemy rozpatrywać ruch punktu materialnego wokół ciała
centralnego (satelity wokół Ziemi) zatem pierwsze prawo przyjmuje postać.
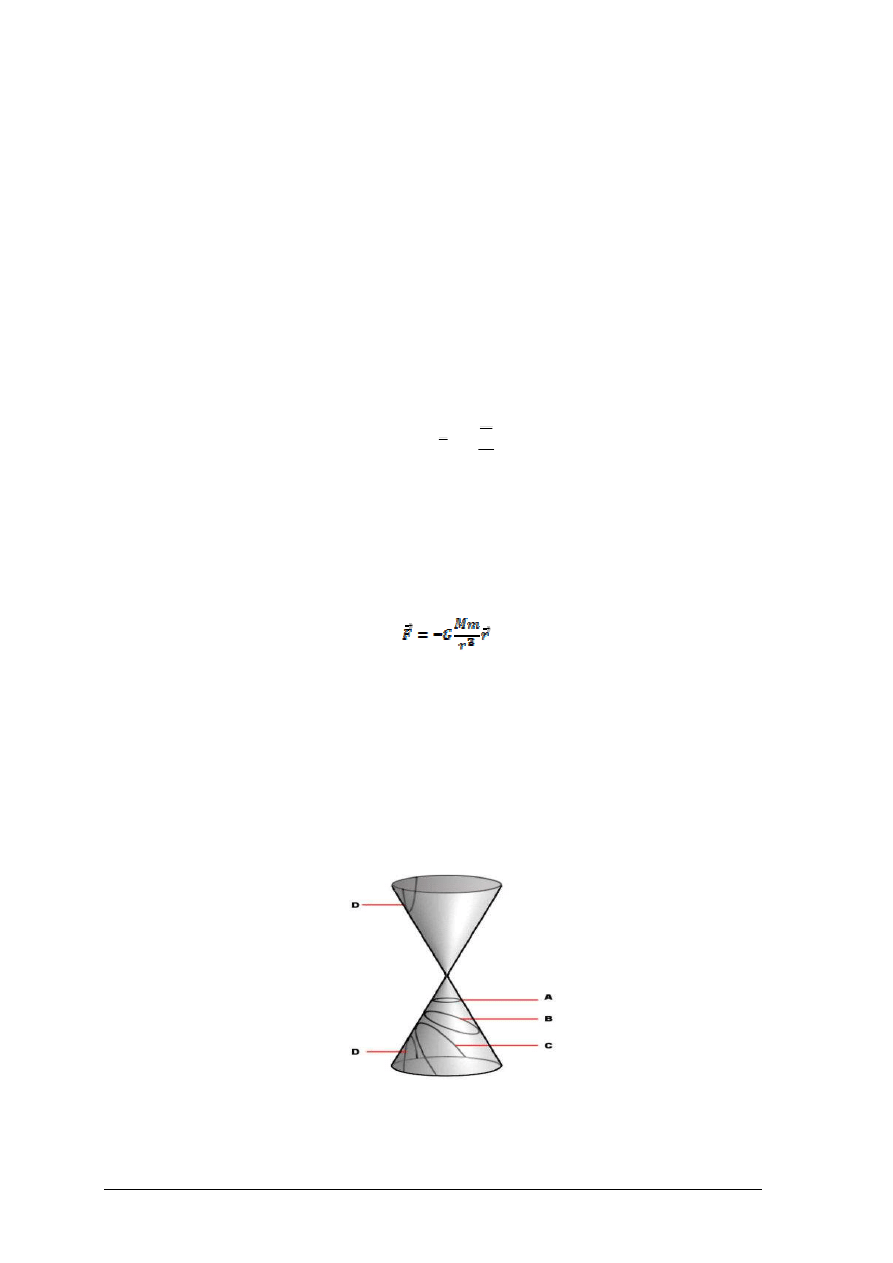
Satelita porusza się po orbicie będącej krzywą stożkową, w jednym z ognisk, której
znajduje się ciało centralne (Ziemia). Krzywa stożkowa jest śladem przecięcia płaszczyzną
pobocznicy stożka.
Rys. 6. Krzywa stożkowa
m
F
k
a
=
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
19
W zależności od kąta zawartego pomiędzy osią symetrii stożka i płaszczyzną cięcia
powstają następujące krzywe płaskie:
−
okrąg,
−
elipsa,
−
parabola,
−
hiperbola,
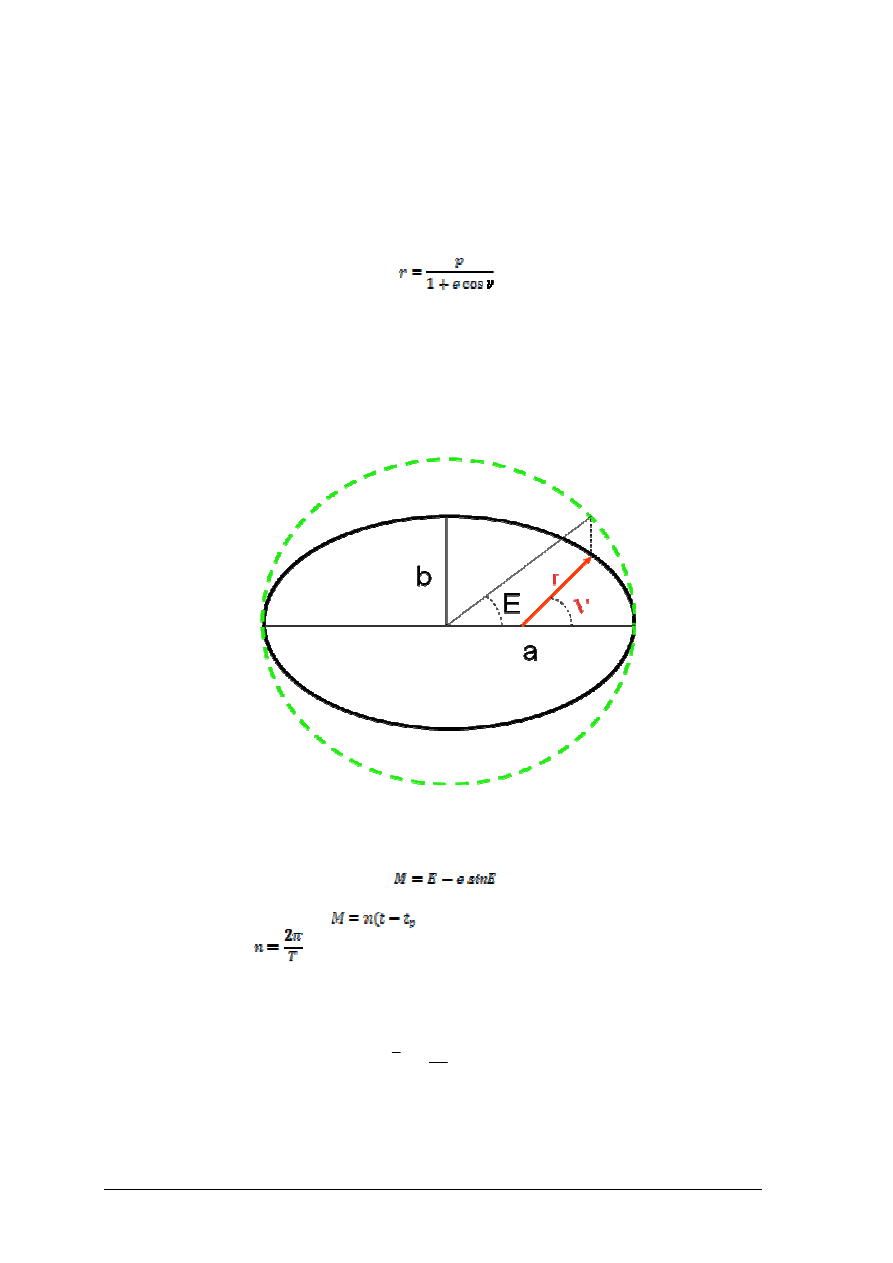
Wszystkie krzywe można na płaszczyźnie opisać jednym równaniem krzywej stożkowej:
e – mimośród orbity (krzywej),
p – parametr ogniskowy,
ν
,r – współrzędne biegunowe.
W mechanice nieba kąt
ν
nazywa się anomalią prawdziwą a r promieniem wodzącym
satelity.
E – jest to anomalia mimośrodowa.
Rys 7. Anomalia prawdziwa i anomalia średnia
Zależność pomiędzy anomalią prawdziwą i anomalią mimośrodową wyraża równanie
Keplera:
gdzie M jest anomalią średnią
n – średnim ruchem
n jest parametrem teoretycznym i oznacza ruch satelity ze stałą prędkością kątową (z praw
Keplera wynika że taki ruch jest możliwy tylko w szczególnym przypadku orbity kołowej).
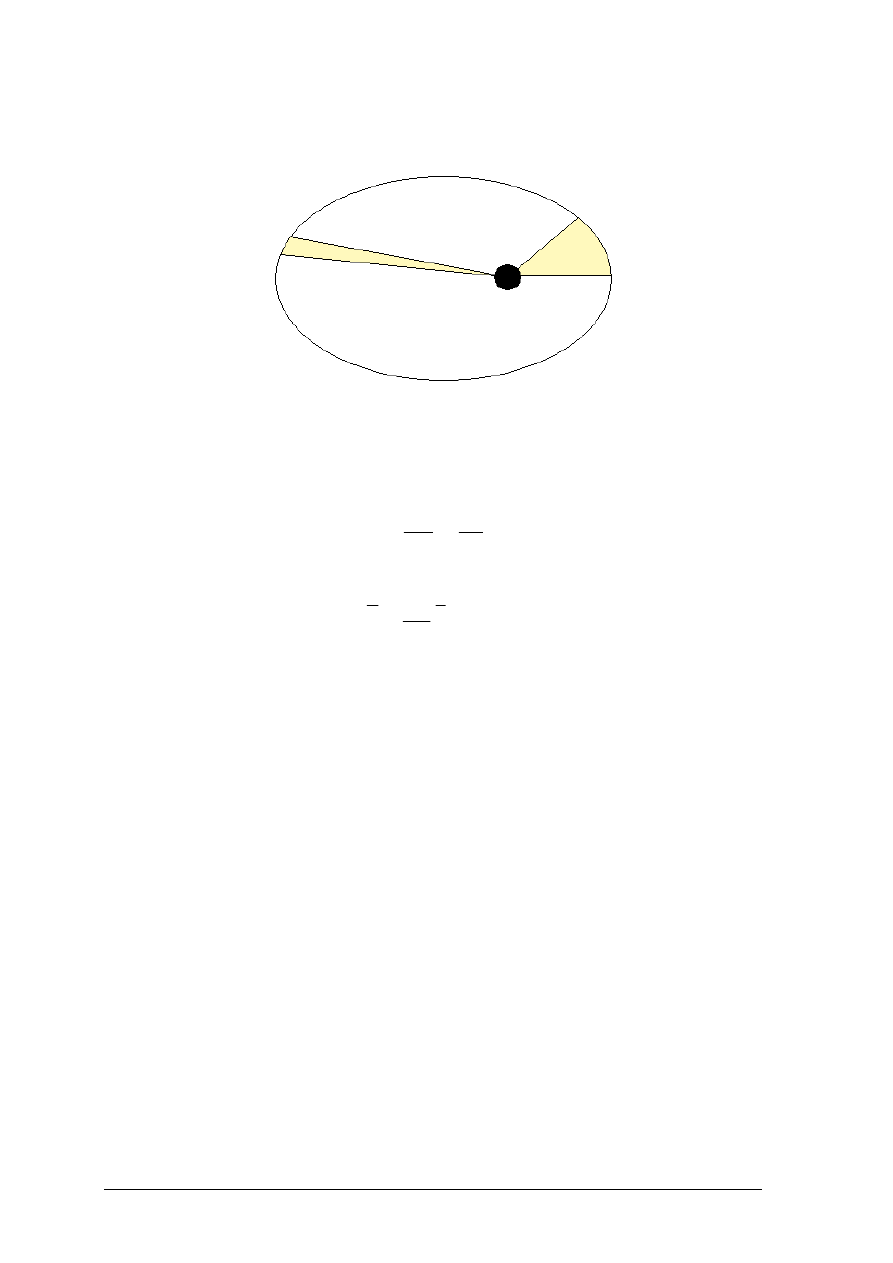
2. Promień wodzący planety zakreśla w równych interwałach czasu równe pola
W ogólności:
Promień wodzący satelity zakreśla w równych interwałach czasu równe pola. Pole (S)
zakreślone promieniem wodzącym satelity jest proporcjonalne do czasu.
const
dt
ds
p
=
=
ν
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
20
Prędkość polowa (S) satelity jest stała. Prędkość kątowa (
ϑ
) satelity zależy od odległości od
ciała centralnego.
Rys. 8. Prawo pól (zamalowane pola mają jednakową powierzchnię)
Ważną konsekwencją drugiego prawa Keplera jest zmienność prędkości kątowej.
3. Kwadraty okresów obiegu planet są proporcjonalne do sześcianów odległości od Słońca
W oparciu o prawa Newtona można napisać równanie ruchu sztucznych satelitów ziemi:
Równanie różniczkowe, wektorowe. W wyniku rozwiązania tego równania otrzymujemy
sześć elementów skalarnych – elementów orbity. Z rozwiązania tego równania wynikają
również przytoczone wyżej prawa Keplera.
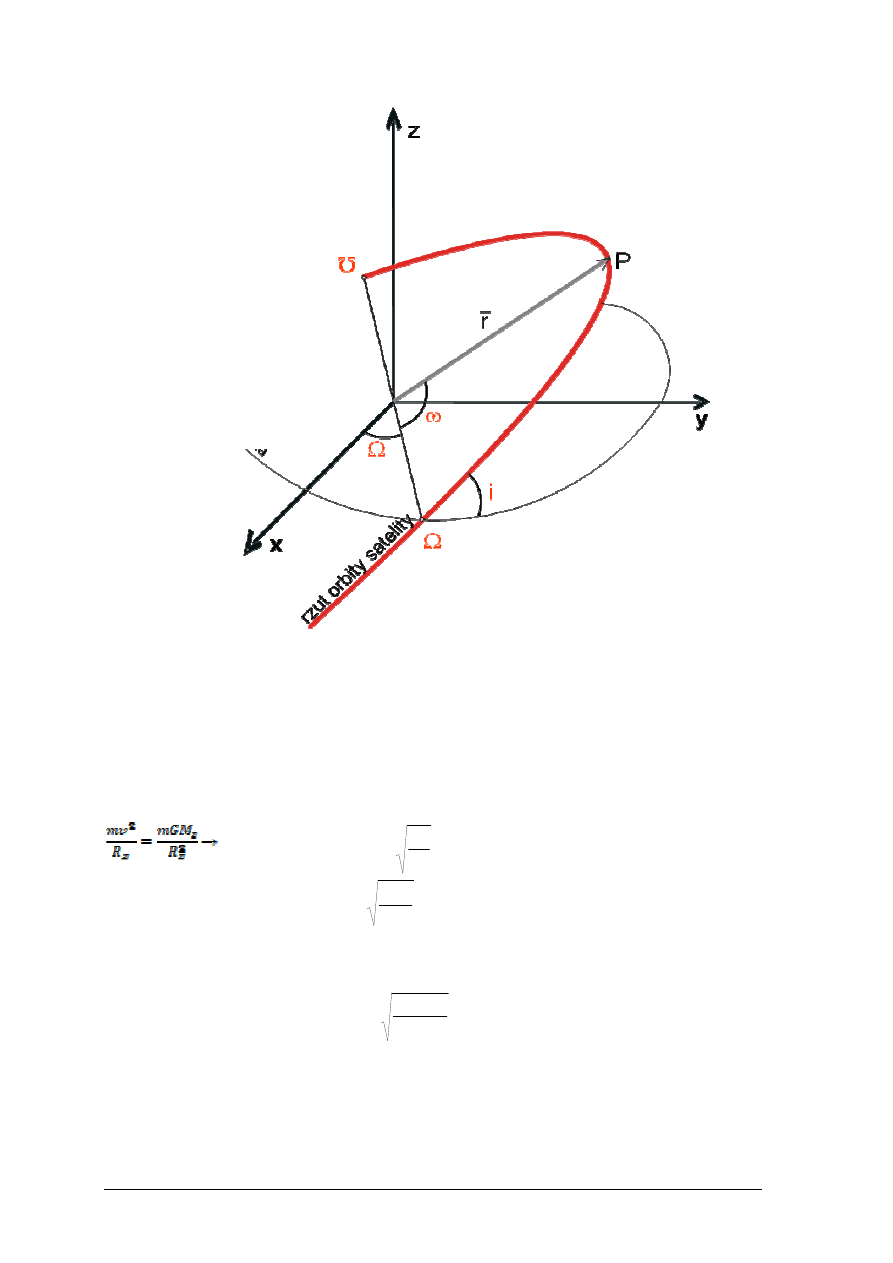
Elementy orbity są to wielkości, które pozwalają określić:
−
tor (trajektorię) satelity w przestrzeni,
−
położenie satelity w przestrzeni,
−
prędkość satelity, w dowolnym momencie.
Elementy określają:
−
położenia płaszczyzny orbity w przestrzeni (nachylenie płaszczyzny orbity do
płaszczyzny równiaka(i), położenie węzła wstępującego (Ω),
−
położenia orbity w jej płaszczyźnie (argument perigeum (ω)),
−
wielkości i kształtu orbity, duża półoś i mimośród orbity,
−
czasu przejścia satelity przez określony punkt orbity najczęściej perigeum (perigeum jest
to punkt orbity znajdujący się najbliżej ciała centralnego).
3
2
3
1
2
2
2
1
r
r
T
T
=
0
r
r
µ
3
=
+
..
r
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
21
Rys. 9. Elementy orbity
Prędkości sztucznych satelitów
Pierwszą prędkością kosmiczną nazywamy minimalną prędkość, jaką należy nadać
satelicie na powierzchni ciała centralnego, aby mógł on oderwać się od tego ciała i poruszać
się po jego powierzchni po orbicie kołowej.
Przyjmując dla Ziemi:
µ
= 3,986*10
5
km
3
/sek
2
, R = 6371 km,
pierwsza prędkość kosmiczna wynosi:
R=R
z
+h
Jeżeli chcemy obliczyć prędkość satelity, który ma się poruszać po orbicie kołowej na
wysokości H powyższy wzór przyjmuje postać:
Jak można zauważyć pojecie I prędkości jest czysto teoretyczne. Praktyczne znaczenie
ma formuła na prędkość satelity, który ma poruszać się po orbicie kołowej. Warto zaznaczyć,
ż
e wektor prędkości musi być prostopadły do promienia wodzącego. W przeciwnym
przypadku mimo nadania satelicie prędkości „kołowej” orbita będzie miała kształt eliptyczny.
sek
km
R
z
kosm
I
/
9
,
7
=
=
µ
υ
sek
km
H
R
z
kosm
I
/
9
,
7
=
+
=
µ
υ
3
2
2
4
π
µ
T
r
=
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
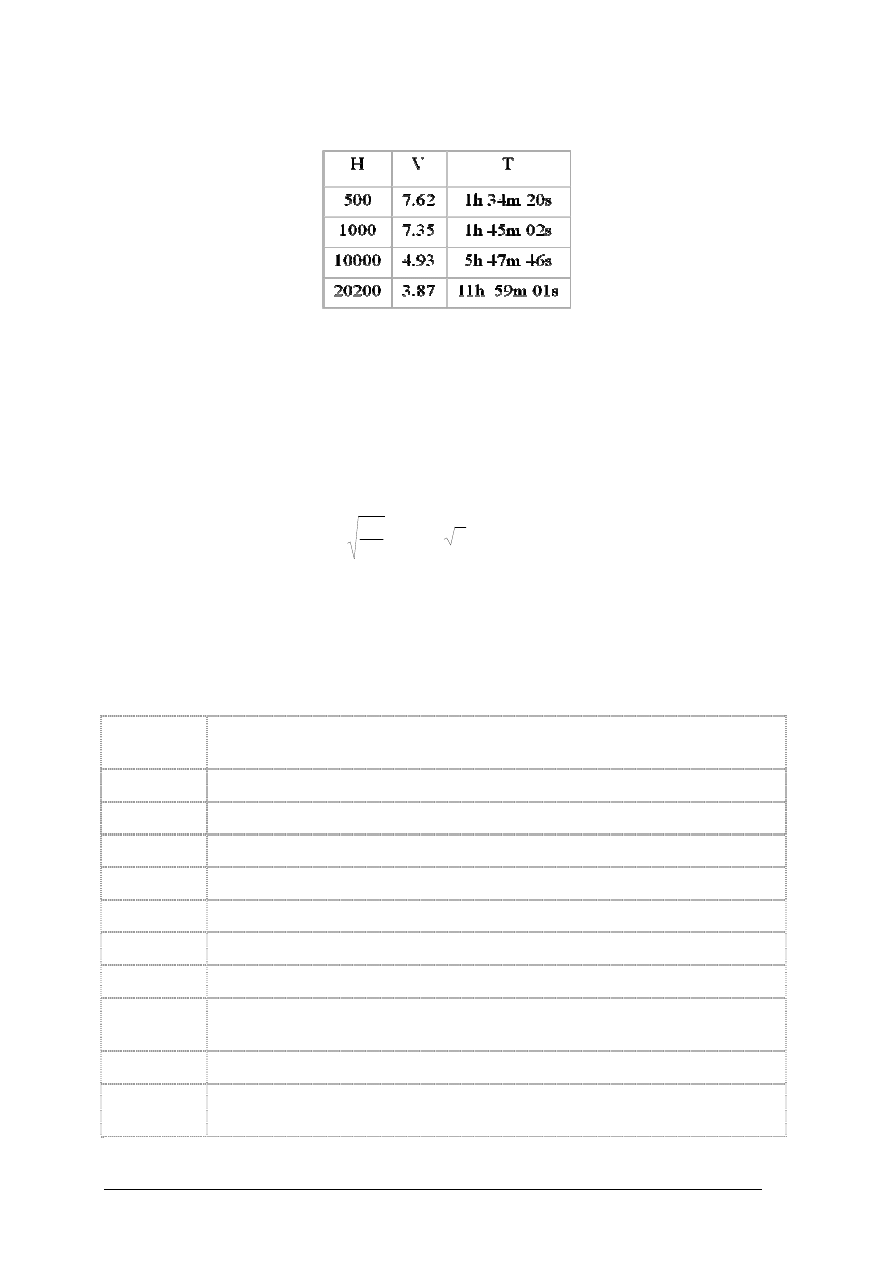
22
Przykładowe prędkości i okresy obiegów satelitów znajdujących się na różnych
wysokościach:
Jeżeli założymy, że okres obiegu satelity wokół Ziemi będzie równy okresowi obrotu
Ziemi wokół własnej osi (doba gwiazdowa), nachylenie orbity do równika będzie 0 to taki
satelita będzie satelitą geostacjonarnym. Pozostają nieruchome względem Ziemi („wiszą” nad
konkretnym punktem nad równikiem). Satelity geostacjonarne są zazwyczaj satelitami
telekomunikacyjnymi.
Druga prędkość kosmiczna – prędkość ucieczki (prędkość paraboliczną) nazywamy
minimalną prędkość, jaką należy nadać satelicie na powierzchni ciała centralnego, aby mógł
on opuścić strefę przyciągania tego ciała.
Sztuczny satelita Ziemi, któremu nadano drugą prędkość kosmiczną opuści strefę
przyciągania Ziemi, lecz zostanie przechwycony przez Słońce i stanie się jego sztuczną
„planetą”.
System GPS
Historia Systemu GPS
1973
Decyzja o projekcie system nawigacyjnego opartego na systemie TRANSIT
i TIMATON
1974 - 1979 Okres testowania
1977
Testowanie pierwszego odbiornika w oparciu o sygnał z pseudosatelity
1978 - 1985 Wystrzelenie 11 satelitów Bloku I
1986
Wypadek wahadłowca "Challenger" z satelitami Bloku II na pokładzie
1989
Uruchomienie satelitów Bloku II
Marzec 1994 Kompletna konstelacja satelitów
17.07.1995
System w pełni opreacyjny
01.05.2000
Wyłączenie selective availability - zwiąkszenie dokładności wyznaczenia
absolutnego z 100 m do ok 15 m
20.03.2004
Wystrzelenie 50 satelity GPS
25.09.2005
Wystrzelenie pierwszego satelity IIR-M z nowym militarnym sygnałem M
i cywilnym L2C
sek
km
2
11
2
V
R
2
V
kosm
I
kosm
II
/
,
=
=
=
µ
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
23
Satelitarny system wyznaczania pozycji GPS składa się zasadniczo trzech segmentów:
−
segmentu kosmicznego,
−
segmentu stacji kontrolnych,
−
segmentu użytkowników.
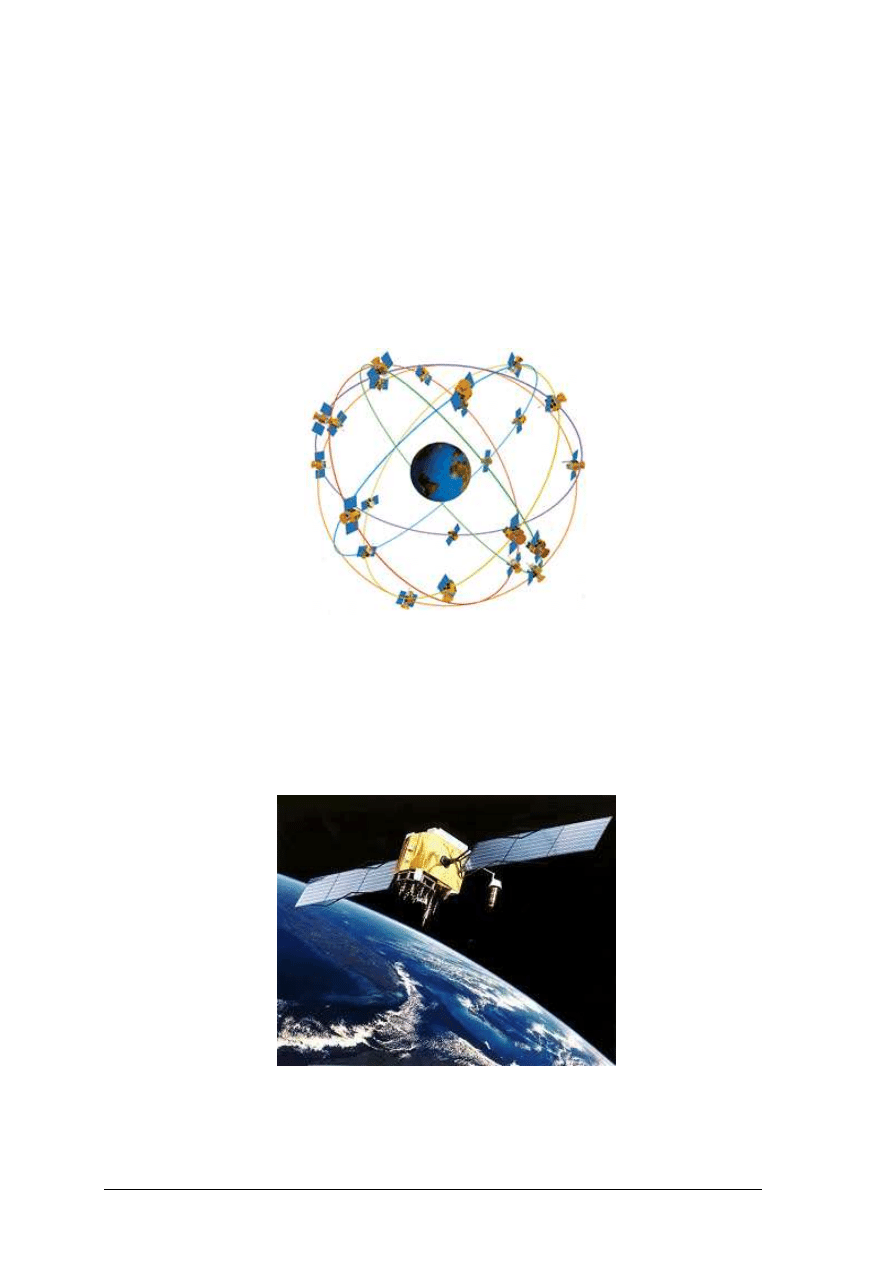
Segment kosmiczny składa się z 24 satelitów rozmieszczonych na sześciu orbitach
prawie kołowych nachylonych po kątem 55 stopni do równika (i=55 st). Na każdej orbicie
znajduje się 4 satelity. Satelity systemu GPS krążą na wysokości 20200 km nad powierzchnią
Ziemi. Okres obiegu satelitów systemu wynosi, zatem 12 godz. Elementy orbit satelitów są
tak dobrane, aby w każdym miejscu na powierzchni
Ziemi nad horyzontem znajdowały się
przynajmniej 4 satelity.
Rys. 10. Konstelacja satelitów GPS [http://www.aero.org]
Każdy satelita wyposażony jest między innymi w następujące systemy:
−
system wprowadzania na orbitę – po wyniesieniu w przestrzeń kosmiczną (najczęściej
przez prom kosmiczny) satelita umieszczany jest na orbicie parkingowej. System
wprowadzania na orbitę złożony z dwóch silników odrzutowych wprowadza satelitę na
orbitę roboczą nadając mu odpowiednią prędkość.
Rys. 11. Satelita systemu GPS [http://www.kowoma.de]
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
24
−
system śledzenia, telemetrii i sterowania (systemy pozwalające na łączność satelity
z ziamią),
−
system kontroli wysokości i prędkości (utrzymuje zaplanowane parametry ruch satelity)
−
blok zasilania,
−
system nawigacyjny.
Podstawowym zadaniem każdego satelity jest emisja wysoko stabilnych częstotliwości.
Z tego powodu na pokładzie każdego satelity znajdują się cztery atomowe wzorce czasu
(zegary atomowe) lub o rząd dokładniejsze masery wodorowe.
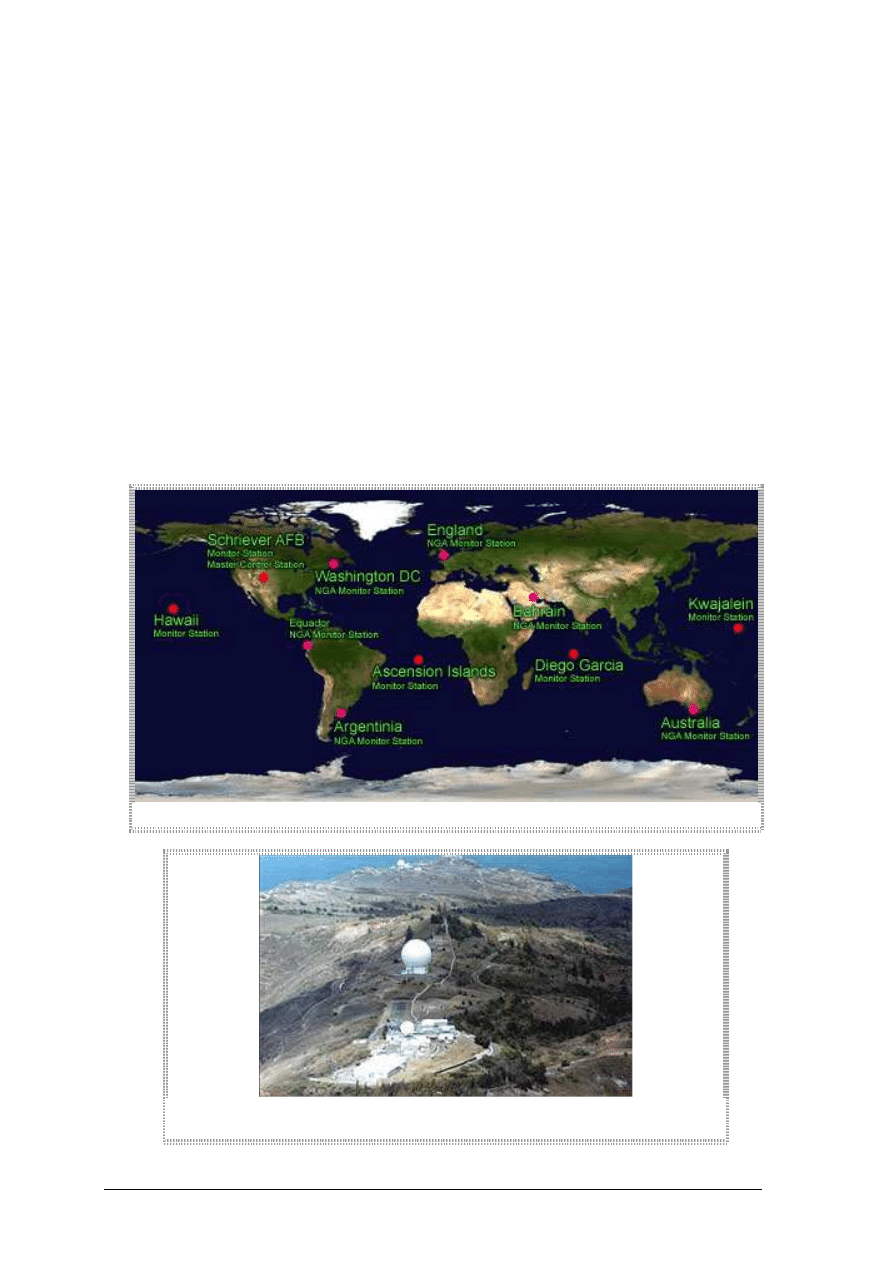
Segment kontrolny
Ciągłym śledzenie satelitów systemu GPS zajmuje się segment kontroli. Stacje
monitorujące znajdują się na Hawajach, na wyspach Wniebowstąpienia, Diego Garcia, na
Oceania Indyjskim, atolu Kwajalein na zachodnim Pacyfiku. Główna stacja znajduje się
w Colorado Springs. Każda stacja wyposażona jest w odbiornik sygnału GPS. Dane z każdej
stacji transmitowane są do głównej stacji, gdzie obliczane są (właściwie predykowane)
elementy orbity każdego satelity (w oparciu o model pola grawitacyjnego Ziemi), poprawki
zegarów. Dane te z powrotem przekazywane są do stacji monitorujących, a następnie
„wstrzykiwane” do pamięci komputerów pokładowych satelitów.
Rys. 12. Stacje monitorujące [http://www.kowoma.de/en/gps/control_segment.htm]
Rys. 13. Stacja śledząca na Hawajach
[http://www.kowoma.de/en/gps/control_segment.htm]

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
25
Główne zadania segmentu kontrolnego:
−
ciągłe monitorowanie i kontrola systemu,
−
konserwacja systemu czasu GPS,
−
wyznaczanie orbit i parametrów zegarów satelitów,
−
okresowe przesyłanie depeszy nawigacyjnej do poszczególnych satelitów.
Segment użytkowników
Wykorzystanie satelitarnego globalnego systemu pozycyjnego obecnie stało się
codziennością podobnie jak korzystanie z telefonów komórkowych. Prostota pomiaru -
(naciśnięcie guzika pozwala wyznaczyć natychmiast pozycję z dokładnością nie gorszą niż
15 m) oraz stosunkowo niedrogie odbiorniki spowodowały, że wykorzystanie systemu GPS
jest powszechne w wielu dziedzinach gospodarki:
−
policja – zautomatyzowana lokalizacja pojazdów i operacyjne dysponowanie pojazdami
specjalnymi i śledzenie ich ruchu; dokumentacja miejsc przestępstwa,
−
pogotowie ratunkowe – kontrola ruchu pojazdów sanitarnych,
−
straż pożarna – automatyczna lokalizacja miejsc pożaru,
−
ratownictwo – lokalizacja katastrof i wypadków, koordynacja akcji ratunkowych,
−
geodezja – zakładanie i aktualizacja sieci geodezyjnych, pomiary niwelacji satelitarnej,
pomiary dla tworzenia i aktualizacji baz danych o przestrzeni gospodarczej (systemy
informacji przestrzennej, w tym informacji geograficznej i informacji o terenie, a także
systemy katastralne), monitorowanie obiektów inżynieryjnych,
−
fotogrametria – rejestracja współrzędnych środka rzutów kamery fotogrametrycznej,
pomiar fotopunktów,
−
transport drogowy, transport publiczny i inżynieria ruchu – monitoring ruchu środków
transportowych,
kontrola
tras
pojazdów
(kontrola
transportu
materiałów
niebezpiecznych),
−
rolnictwo, leśnictwo i ochrona środowiska – monitoring upraw (w tym dla potrzeb
kontroli zasiewów systemu dopłat bezpośrednich IACS), nawigacja wspomagająca
działania w zakresie ochrony upraw i nawożenia, ewidencja zanieczyszczeń itp.,
−
ochrona mienia – automatyczna lokalizacja pojazdów w satelitarnych systemach anty-
kradzieżowych,
−
inżynieria – automatyzacja robót inżynieryjnych poprzez automatyczne sterowanie
maszynami roboczymi,
−
energetyka – ewidencja obiektów i tras przesyłu energii, lokalizacja uszkodzeń,
−
telekomunikacja – lokalizacja obiektów telekomunikacyjnych, synchronizacja czasu
i częstotliwości,
−
rekreacja i turystyka – inwentaryzacja i tyczenie tras i obiektów turystycznych,
wykorzystanie systemu przez turystów do nawigacji po ustalonych trasach.
Zasada wyznaczenia pozycji w systemie GPS
Wyznaczenie pozycji technologią GPS można podzielić na dwa zasadnicze sposoby: przy
wykorzystaniu obserwacji kodu generowanego i wysyłanego przez satelity oraz poprzez
pomiar fazy fali nośnej (ze sposobem pomiaru pseudoodległości do satelitów wiąże się
podział instrumentów na dwie kategorie: kodowe i fazowe). Dokładność wyznaczenia
absolutnej wartości położenia przy użyciu pomiaru kodowego szacowana jest na kilkanaście
metrów. Wyznaczenie pozycji instrumentami fazowymi jest znacznie dokładniejsze ale błąd,
jaki uzyskamy może kształtować się na poziomie kilku metrów. Pomiary względne zarówno
w obserwacjach kodowych jak i fazowych zdecydowanie polepszają jakość rozwiązania (dla
pomiaru kodowego to kilka metrów, a dla wyznaczenia fazowego osiągnąć można nawet
milimetrowe dokładności wyznaczenia wektora).
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
26
Sygnały z satelitów GPS
Jak już wspomniano satelity wyposażone są w bardzo precyzyjne zegary atomowe lub
masery wodorowe o stabilności na poziomie 10-14 s. Dzięki tym zegarom generują
zasadniczo dwie częstotliwości: L1= 1575.42 MHz co odpowiada długości fali 19.05 cm oraz
częstotliwość L2= 1227.60 MHz co odpowiada długości fali 24.45 cm. Dodatkowo na
częstotliwość L1 nakładany jest kod C/A (coarse acquisition lub clear acquisition) – ogólno
dostępny inny dla każdego satelity oraz kod P (precise, protected) - precyzyjny przeznaczony
dla autoryzowanych użytkowników (zamieniany na kod Y – tajny. Funkcja zamiany nosi
nazwę anti-spoofing – przeciwdziałanie zafałszowaniu). Kod P nakładany jest również na
częstotliwość L2. Obecnie planuje się modulowanie kodem C/A częstotliwości L2. Okres
kodu C/A wynosi 1 milisekundę, co odpowiada długości fali 293.1 m. Okres kodu P to 267
dni. Tej częstotliwości odpowiada długość fali równa 29.31 m. Kody są generowane binarnie
w postaci pseudo-przypadkowego szumu. Oprócz tak uformowanych sygnałów satelity
transmitują depeszę (50 bitów na sekundę). Depesza zawiera dane nawigacyjne (m in.
elementy orbity lub ich funkcje, wyrazy poprawkowe do elementów orbity, poprawkę zegara
satelity).
Wyznaczenie pozycji anteny odbiornika GPS umieszczonego na powierzchni Ziemi
odbywa się z wykorzystaniem sygnałów docierających z satelitów do odbiornika.
Współrzędne wyznaczane są w względem elipsoidy WGS’84 (GRS ‘80) (szerokość
geodezyjna, długość geodezyjna i wysokość elipsoidalna (długość odcina od powierzchni
elipsoidy do punktu na fizycznej powierzchni Ziemi)).
Rys. 14. Elipsoida WGS 84 [wykonano w oparciu o materiały edukacyjne Trimble]
Wyznaczenie pozycji z wykorzystaniem pomiaru kodu
Ogólna zasada wyznaczenia pozycji polega na pomiarze pseudoodległości do satelitów
systemu. Dzięki tym pomiarom i znanym pozycjom satelitów można wykonać liniowe
wcięcie wstecz. A więc zasadniczy problem sprowadza się do tego, w jaki sposób pomierzyć
odległość do satelitów.
Pomiar odbiornikiem kodowym polega na porównaniu przychodzącego z satelity kodu
C/A z kodem generowanym w odbiorniku (replica code).
Wyobraźmy sobie, że w tym samym momencie czasu satelita i odbiornik rozpoczynają
generowanie kodu C/A. Łatwo zauważyć, że kod wysyłany z satelity zanim dotrze do
odbiornika przebędzie drogę ok. 20200 km a więc będzie opóźniony w stosunku do kodu
generowanego w instrumencie. Kod generowany w odbiorniku musi zostać przesunięty, do
momentu maksymalnej korelacji z kodem przychodzącym. To przesunięcie w czasie jest
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
27
wielkością mierzoną i jest proporcjonalne do przebytej drogi. Można zatem napisać równanie
pseudoodległości w postaci:
gdzie w nawiasie występuje nominalna różnica czasu transmisji i odbioru kodu.
c – prędkość światła.
Pseudoodległości
Wartość D
p
jest obarczona różnymi błędami: błąd pomiaru czasu (niesynchronizacji
zegarów satelity i odbiornika), błąd wynikający z przejścia fali przez atmosferę (jonosferę
i troposferę). Zatem z pomiaru nie otrzymamy prawdziwej wartości odległości
(tzw. pseudoodległość). W celu wyznaczenia współrzędnych anteny odbiornik musi
pomierzyć pseudoodległości do przynajmniej czterech satelitów (niewiadome: współrzędne
x,y,z oraz poprawka zegara odbiornika). Przypomnijmy, że właśnie z tego powodu
zaprojektowano konstelację satelitów tak, aby w każdym miejscu na Ziemi bez względu na
porę dnia, porę roku czy pogodę można obserwować sygnały z przynajmniej 4 satelitów
systemu. Ten typ odbiorników najczęściej można spotkać w systemach nawigacji
samochodowej.
Wyznaczenie pozycji z wykorzystaniem pomiaru fazy fali nośnej
Pomiar fazowy polega na wyznaczeniu różnicy faz fali docierającej do odbiornika od
satelity GPS i fali generowanej przez oscylator kwarcowy w odbiorniku. Równanie
obserwacji fazowych ma postać (C
ZARNECKI
, 1996):
ϕ
ε
ϕ
ϕ
ϕ
+
+
−
=
s
k
k
s
s
k
N
t
t
t
)
(
)
(
)
(
,
gdzie:
−
ϕ
s
,
ϕ
k
oznaczają fazę fali wytwarzanej przez atomowy zegar satelity i fazę generowaną
w odbiorniku,
−
N
k
s
oznacza całkowitą nieznaną liczbę cykli fazowych,
−
ε
ϕ
oznacza błąd pomiaru różnicy faz.
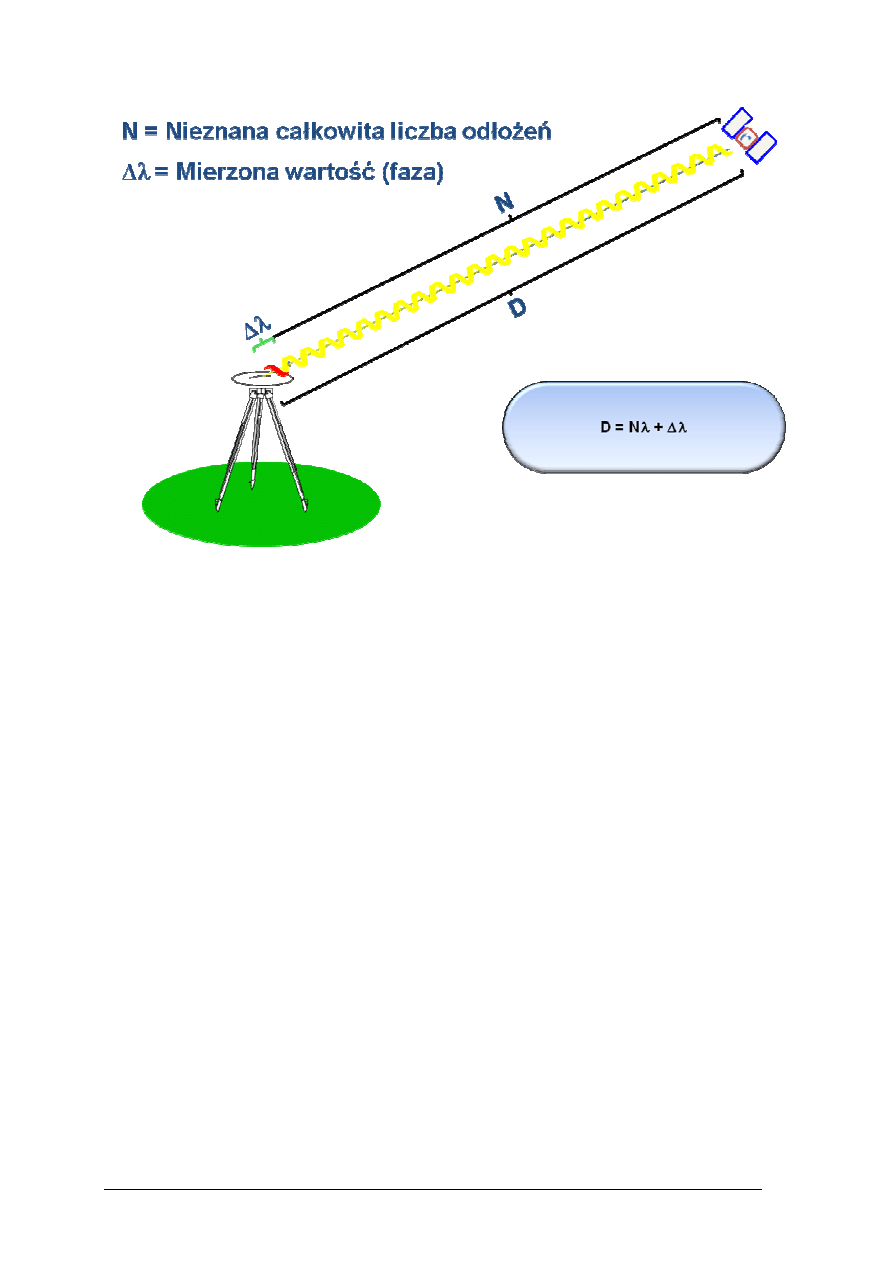
Gdyby na początku pomiaru znana była liczba cykli fazowych odległość topocentryczna
do satelity mogłaby być wyznaczona poprzez realizację następującego wzoru:
]
)
(
[
ϕ
ε
ϕ
λ
+
+
=
s
k
s
k
s
k
N
t
r
λ
– jest znaną długością fali transmitowaną przez satelitę.
Poniższy rysunek przedstawia zasadę wyznaczenia pseudoodległości w oparciu o pomiar
fazy.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
28
Rys. 15. Wyznaczenie pseudoodległości [wykonano w oparciu o materiały edukacyjne firmy Trimble]
Głównym problemem jest wyznaczenie nieoznaczoności czyli pełnej liczby cykli
fazowych N do każdego obserwowanego satelity. Proces wyznaczenia nieoznaczoności
nazywa się inicjalizacją odbiornika. Uzyskanie wartości N jest możliwe tylko wówczas, gdy
do jej wyznaczenia wykorzystamy obserwacje z przynajmniej dwóch odbiorników, które
pracowały w tym samym czasie (pomiary synchroniczne).
Pomiary absolutne i względne
Pojęcie pomiar absolutny oznacza, wyznaczenie pozycji anteny jednym instrumentem.
Dokładność wyznaczenia współrzędnych tym sposobem kształtuje się na poziomie ok. 15 m
dla instrumentów kodowych.
Pojęcie pomiar względny oznacza synchroniczną pracę przynajmniej dwóch
instrumentów, które obserwują te same satelity. Wyznaczamy w ten sposób wzajemne
położenie instrumentów – wektory pomiędzy odbiornikami. Dokładność względnego
wyznaczenia instrumentami kodowymi, można oszacować na poziomie ok. 3 m., natomiast
jeżeli użyjemy instrumentów mierzących fazę to można uzyskać dokładność wektora na
poziomie kilku milimetrów.
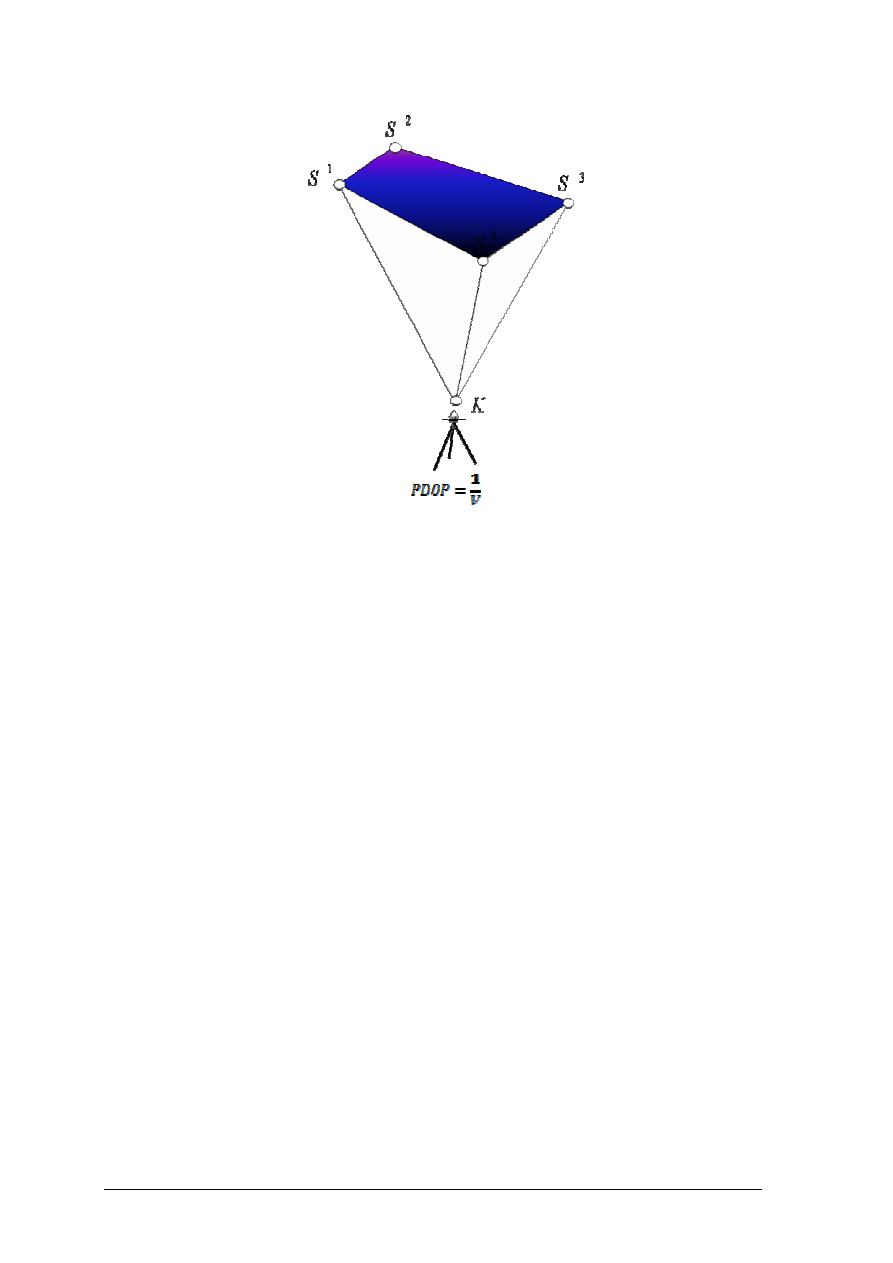
Istotne znaczenie dla dokładności wyznaczenia współrzędnych ma geometria
rozmieszczenia satelitów. Parametrem, wskazującym na jakość wcięcia jest współczynnik
PDOP. Posiada interpretację w postaci odwrotności wielościanu rozpiętego na
obserwowanych satelitach i wierzchołku w centrum fazowym anteny.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
29
Rys. 16. Graficzna prezentacja współczynnika PDOP
gdzie V oznacza objętość.
Wartości tego współczynnika (im mniejsza wartość tym lepsza geometria) można śledzić
najczęściej na wyświetlaczu odbiornika lub rejestratora połączonego z odbiornikiem.
Przyjmuje się, że graniczną wartością PDOP jest 7, powyżej której instrument nie powinien
obserwować satelitów ze względu na złą konfigurację wcięcia.
Wyznaczenie nieoznaczonej liczby cykli fazowych
Problem wyznaczenia nieoznaczoności w pomiarach fazowych znalazł rozwiązanie
w wielu algorytmach obliczeniowych Dotyczy to również algorytmów działających w czasie
rzeczywistym.
Historycznie rzecz ujmując, wyznaczenie całkowitej liczby cykli fazowych bardzo ściśle
wiązało się z samym procesem obserwacji oraz technologią pomiarową. Wykonywanie
obserwacji na znanej bazie dwoma instrumentami nastręczało kłopot pomiarowy, ponieważ
nie zawsze były znane współrzędne końcowych punktów bazy w układzie WGS-84. Była to
jedna z pierwszych procedur wyznaczenia nieoznaczoności. Inną procedurą pomiarową był
sposób z zamianą anten na kilkukilometrowej nieznanej bazie.
Przełomem okazało się opracowanie w 1992 roku algorytmów, które umożliwiają
inicjalizację, podczas, gdy antena znajduje się w ruchu. Procedury te nazwane zostały On-
The-Fly (OTF). Okazało się, że technologia ta znakomicie nadaje się do wyznaczania pozycji
z kilkucentymetrową dokładnością. Inicjalizacja rozwiązana jest w czasie kilku epok
pomiarowych w oparciu o wyznaczenie nieoznaczoności z wykorzystaniem kombinacji
obserwacji kodowych i fazowych pomiędzy epokami pomiarowymi. Jest to obecnie
najczęściej wykorzystywany algorytm inicjalizacji odbiorników fazowych (odbiorniki
kodowe nie wymagają inicjalizacji).
Wyznaczenie nieoznaczoności jest możliwe tylko, gdy dysponujemy obserwacjami, z co
najmniej dwóch instrumentów.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
30
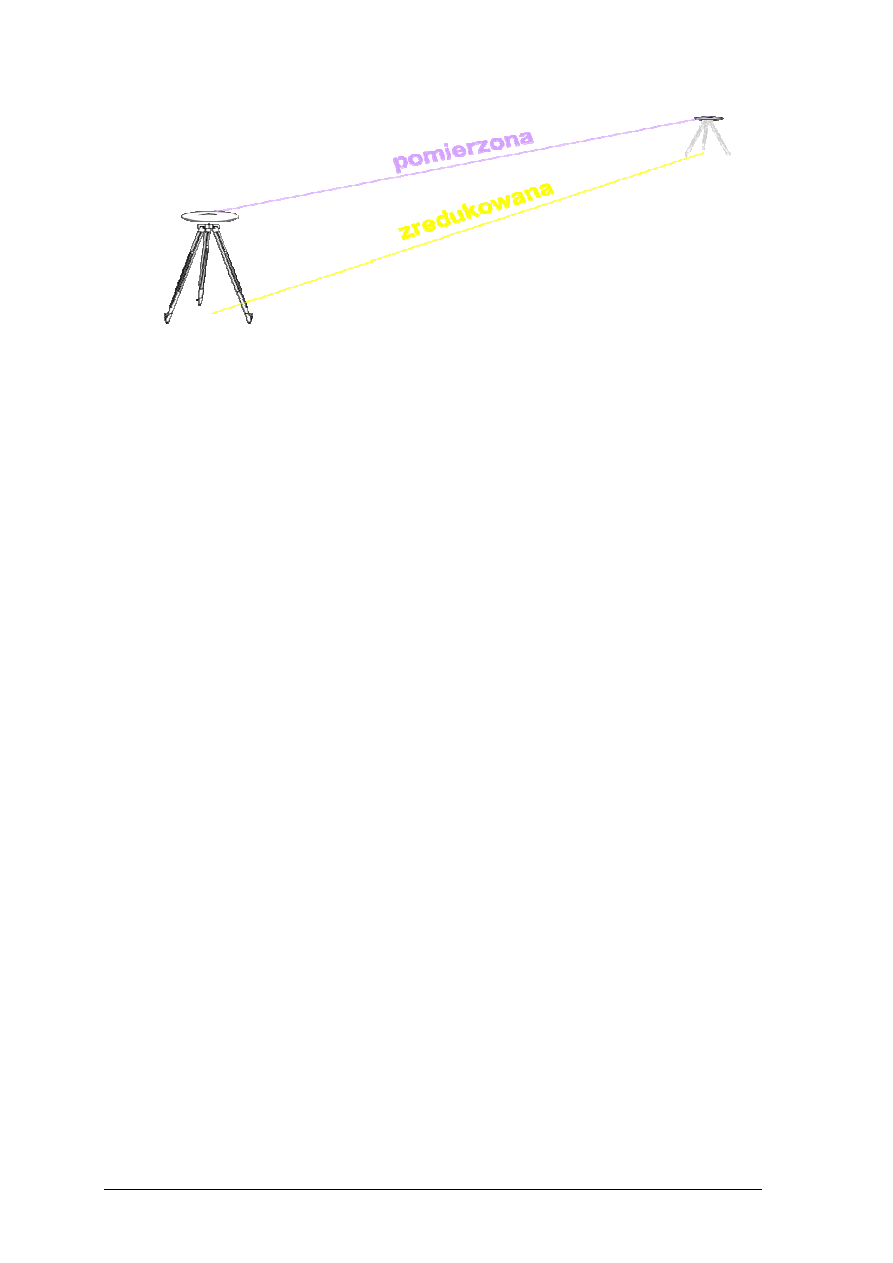
Rys. 17. Wektor pomierzony i zredukowany do centrów znaku (pomiary względne)
Technologie pomiarowe
W zależności od posiadanego sprzętu pomiarowego, od celu, jakiemu mają pomiary
służyć oraz od wymaganej dokładności możemy posłużyć się następującymi technologiami
pomiarowymi:
1.
Technologią statyczna (static).
2.
Technologią szybka statyczna (Fast Static, Rapid Static).
3.
Technologią pseudostatyczna (obecnie nieużywana).
4.
Technologią półkinematyczna (obecnie nieużywana).
5.
Technologią RTK (Real Time Kinematic - kinematyczna w czasie rzeczywistym).
6.
Technologią DGPS (różnicowe (względne) pomiary kodowe w czasie rzeczywistym).
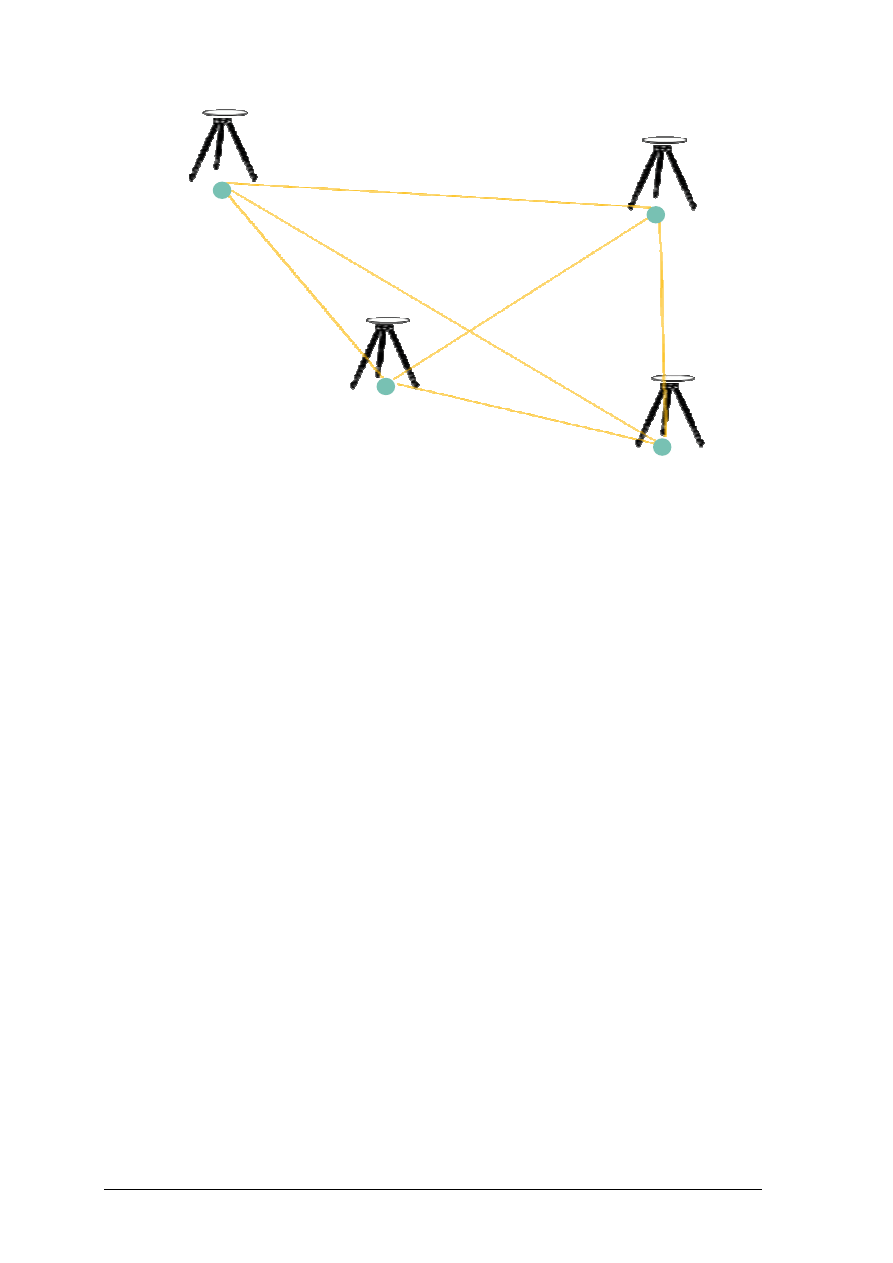
Technologia statyczna
Technologia pozwalająca osiągnąć najwyższą dokładność nawet dla długich cięciw
±
(2-3 mm).
Długość sesji obserwacyjnych (minimalny czas synchronicznych obserwacji) zależy
głównie od odległości pomiędzy punktami oraz przeznaczenia sieci i wynosi:
20-90 min
dla sieci lokalnych (wektory do 20-30km)
L1 30 min+3 min/km
L1/2 20 min+2 min/km
1-2 dni – dla punktów odniesienia sieci krajowych i geodynamicznych o charakterze
lokalnym
5-7 dni – dla sieci kontynentalnych i podstawowych sieci geodynamicznych
Minimalna liczba obserwowanych satelitów: 4.
Minimalna wysokość obserwowanych satelitów (maska, kąt obcięcia) 10
°
.
Technologia przydatna w pomiarach o najwyższej dokładności.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
31
Rys. 18. Pomiar technologią statyczną czterema odbiornikami
Na każdym mierzonym punkcie należy pomierzyć wysokość anteny oraz wypełnić
dziennik pomiarowy, który musi zawierać następujące dane:
−
nazwa projektu i punktu pomiarowego,
−
data i numer sesji,
−
czas rozpoczęcia i zakończenia pomiaru,
−
nazwa punktu (identyfikator) użyta do nazwania zbioru z obserwacjami (????-DOY-S),
−
imię i nazwisko obserwatora,
−
numer seryjny odbiornika i anteny,
−
wysokość anteny i elementy ekscentru punktu,
−
szkic pomiaru wysokości anteny,
−
uwagi.
DOY- kolejny dzień w roku (Day of year)
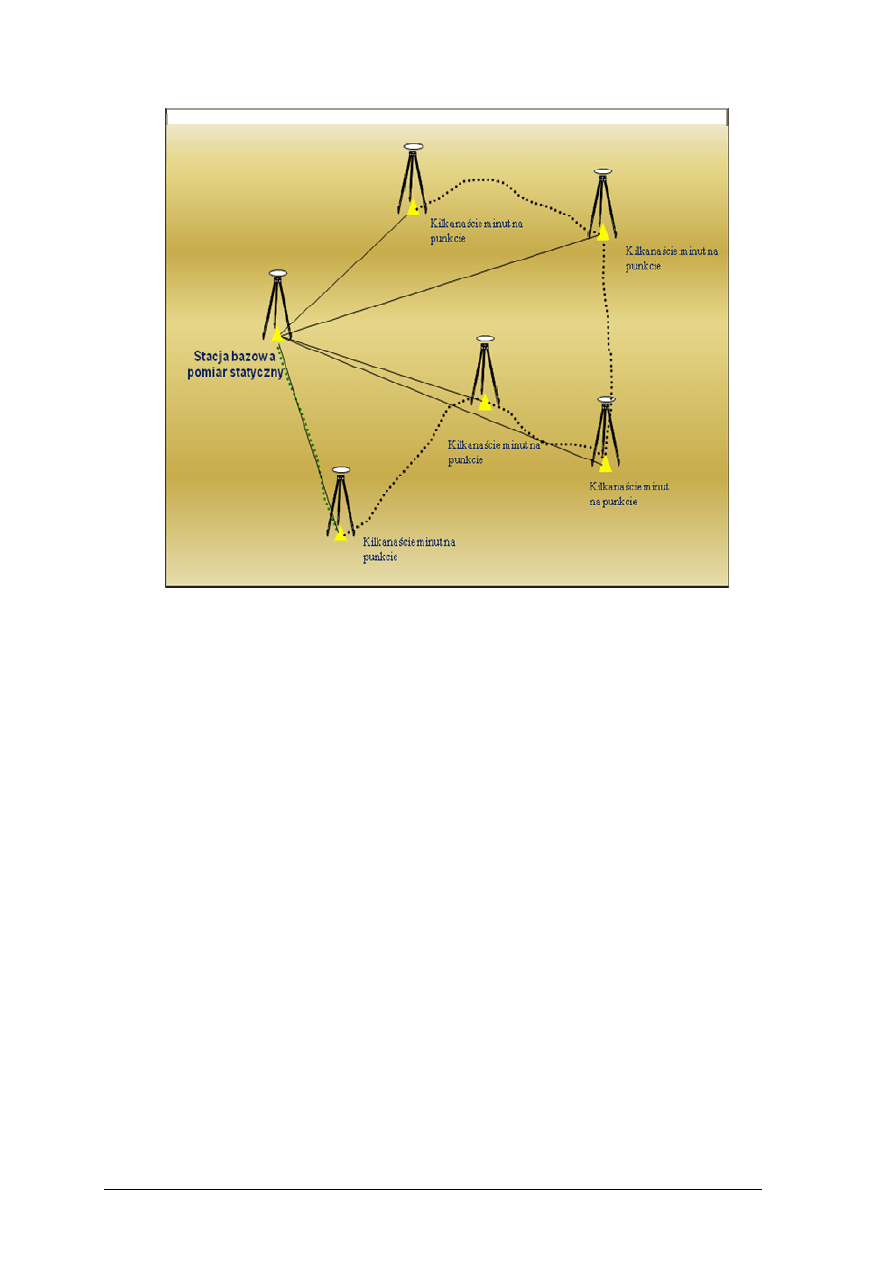
Technologia szybka statyczna
Technologia kompromisowa pomiędzy wysoką dokładnością metody statycznej
i szybkością pomiaru;
±
(5-10mm+1ppm)
Czas pomiaru planuje się w funkcji liczby obserwowanych satelitów (pożądane 5-6)
i długości wektora (do 15-20 km)
L1 20min+2min/km
L1/2 10min+1min/km
Metoda efektywna przy zastosowaniu odbiorników dwuczęstotliwościowych
Nie jest wymagana stała łączność z satelitami podczas przemieszczania odbiornika
z punktu na punkt.
Metoda przydatna w zakładaniu lokalnych sieci geodezyjnych, (osnowa III klasy).
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
32
Rys. 19. Pomiar technologią szybką statyczną
Na każdym mierzonym punkcie należy pomierzyć wysokość anteny oraz wypełnić
dziennik pomiarowy który musi zawierać następujące dane:
−
nazwa projektu i punktu pomiarowego,
−
data i numer sesji,
−
czas rozpoczęcia i zakończenia pomiaru,
−
nazwa punktu (identyfikator) użyta do nazwania zbioru z obserwacjami (????-DOY-S),
−
imię i nazwisko obserwatora,
−
numer seryjny odbiornika i anteny,
−
wysokość anteny i elementy ekscentru punktu,
−
szkic pomiaru wysokości anteny,
−
uwagi.
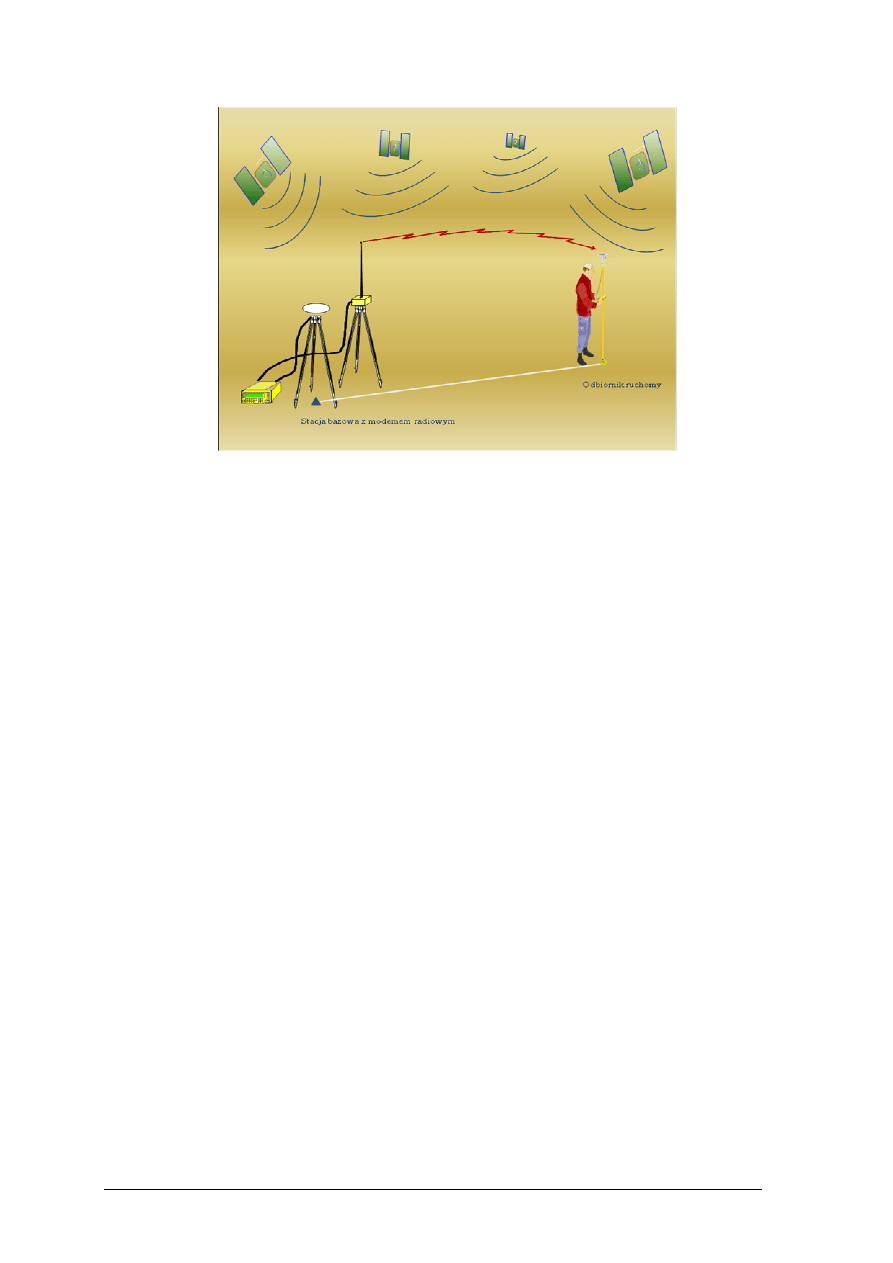
Technologia RTK
Technologie RTK wymaga oprócz śledzenia satelitów przez stację bazową i odbiornik
ruchomy łączności bezprzewodowej pomiędzy odbiornikami (modem radiowy, telefon
komórkowy). Stacja bazowa (ustawiona na punkcie o znanych współrzędnych) wyznacza
poprawkę do pomiarów fazowych a następnie wysyła ją do odbiornika ruchomego. Dzięki
temu odbiornik może wyznaczyć nieoznaczoność, a następnie współrzędne względem stacji
bazowej z dokładnością kilku centymetrów.
Technologia coraz powszechniej wykorzystywana do pomiarów szczegółów terenowych
i zakładania osnów pomiarowych. Trudna do stosowania w terenach zurbanizowanych
(wymaga ciągłego śledzenia przynajmniej 5 satelitów). Odległość odbiornika ruchomego od
stacji bazowej nie powinna przekraczać 10 km.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
33
Rys. 20. Pomiar technologią RTK [wykonano w oparciu o materiały edukacyjne Trimble]
Technologia DGPS
Wykorzystuje pomiary kodowe. Wymaga łączności bezprzewodowej pomiędzy stacją
bazową a odbiornikiem ruchomym. Nie wymaga inicjalizacji. Odległość od stacji bazowej
może osiągać nawet 500 km. Dokładność wyznaczenia wektora: ok. 3 m.
Stosowana w nawigacji. Poprawki mogą być transmitowane również z satelitów
geostacjonarnych (w systemie EGNOS stacje połączone w sieć wyznaczają poprawki
i przesyłają je do satelitów geostacjonarnych, a następnie mogą być odbierane przez
odbiorniki przystosowane do tego celu).
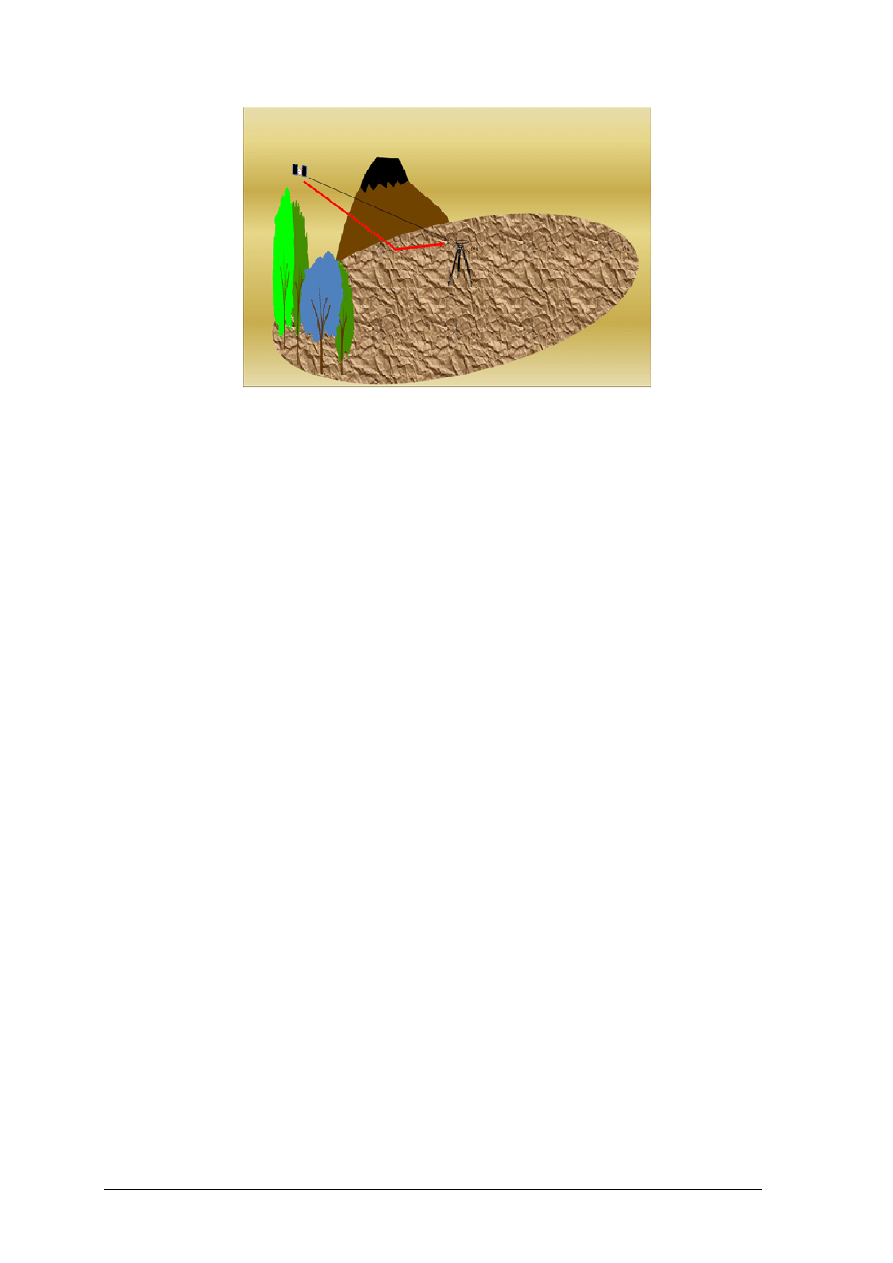
Zagadnienia związane z wykonywaniem pomiarów technologią GPS
Pomiary z wykorzystaniem technologii GPS oparte są jak przedstawiono wyżej na
pomiarze (obserwacji) sygnał radiowego (transmitowanego z satelitów systemu).
Właściwości fizyczne sygnału o takiej częstotliwości wprowadzają ograniczenia
w stosowaniu tej technologii pomiarowej.
Ze względu na to, że sygnał satelitarny nie przenika przez przeszkody terenowe (jest
odbijany) technologię GPS można stosować tylko w terenach otwartych (z dala od
budynków, drzew itp.). Odbicia sygnału od przeszkód terenowych powodują efekt
wieldrożności (odległość do satelity jest mierzona jako złożenie odległości od satelity do
przeszkody i od przeszkody do anteny), co w konsekwencji obniża dokładność wyznaczenia
współrzędnych punktów.
Na dokładność pomiarów mają również wpływ czynniki związane z przejściem fali przez
atmosferę, (jonosferę i troposferę). W celu zminimalizowania wpływu atmosfery opracowuje
się modele jonosfery i troposfery a następnie koryguje mierzone wielkości.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
34
Rys. 21. Efekt wielodrożności sygnału
Opracowanie obserwacji
Obserwacje satelitarne wykonane technologią statyczną i szybką statyczną wymagają
opracowania (postprocessingu).
Można wyróżnić następujące etapy opracowania obserwacji:
−
transmisja danych z instrumentów do komputera,
−
konwersja obserwacji do formatu RINEX (Receiver INdependent EXchange format -
Przyjęty przez międzynarodową społeczność geodezyjną w 1989 r. niezależny od typu
odbiornika i programu opracowania obserwacji. Zapisany jest w formacie ASCII;
maksymalnie 80 znaków w rekordzie (linii). Obejmuje trzy typy plików o standardowych
nazwach postaci ssssdddf.yyt (ssss - oznaczenie stacji, ddd - dzień roku, f - numer zbioru
w danym dniu; yy - rok; t - typ zbioru danych: O - obserwacyjny, N - nawigacyjny,
M - meteorologiczny),
−
obliczenie wektorów pomierzonej sieci (pomiary satelitarne tworzą sieć wektorową),
−
wyrównanie z oceną dokładności pomierzonej sieci,
−
transformacja do obowiązującego układu odniesień przestrzennych,
−
sporządzenie raportu z obliczeń.
Opracowanie
obserwacji
wymaga
specjalnego
oprogramowania
najczęściej
dostarczanego wraz ze sprzętem pomiarowym.
System GLONASS
Z założenia powinien składać się z 24 satelitów z rozmieszczonych na trzech orbitach
różniących się długością węzła wstępującego o 120
°
. Głównie ze względów ekonomicznych
aktualnie na orbicie znajduje się tylko ok. 15 operacyjnych satelitów, co jednak wystarcza do
prawidłowego funkcjonowania
Nominalne nachylenie orbit względem równika wynosi 64,48°, dzięki czemu możliwe jest
lepsze pokrycie satelitami wyższych szerokości geograficznych niż w przypadku systemu
GPS.
Orbity systemu:
prawie kołowe,
duża półoś: 25 510 km
okres obiegu T = 11 h 15 min 48 s
nachylenie i = 64.48°
co 17 okrążeń każdy satelita pojawia się nad tym samym punktem na ziemi,

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
35
o określonym czasie każdego dnia jakiś satelita tej samej orbity będzie widoczny w tym
samym punkcie na Ziemi.
Sygnały GLONASS
każdy satelita GLONASS transmituje sygnał na innej częstotliwości,
transmitowane częstotliwości są z przedziału:
−
L1 1602 do 1615.5 MHz,
−
L2 1246 do 1256.5 MHz.
−
częstotliwości L1 i L2 są związane zależnością fL1 / fL2 = 9 / 7 (przez pomiar na dwóch
częstotliwościach usuwa się refrakcję jonosferyczną),
−
wszystkie satelity GLONASS transmitują taki sam kod (satelity GPS różne kody),
−
każdy satelita GLONASS nadaje swoją precyzyjną pozycję na pełne pół godziny,
−
sygnały (czasu) są odniesione do systemu czasu UTCSU (uniwersalny czas
koordynowany Rosji),
−
współrzędne satelity podawane są w układzie odniesienia PZ 90,
−
system nie stosuje żadnych zakłóceń (satelity GLONASS nie są degradowane).
Segment Kontrolny składa się z Głównej stacji kontroli w Moskwie, 4 stacji
monitorująco-śledzących (St.Petersburg, Tarnopol na Ukrainie, Jenisejsk, Komsomolsk nad
Amurem), centralnego zegara systemu, systemu monitoringu sygnału nawigacyjnego
opartego na bezpośrednim porównywaniu sygnału dwu- i jednodrogowego. Funkcjonalnie
system kontroli naziemnej jest podobny do systemu GPS, jednak wszystkie jego elementy są
ulokowane na terenie Rosji i byłego ZSRR.
Obecnie są produkowane odbiorniki dwusystemowe (GPS+GLONASS). Jednoczesne
korzystanie z obu systemów wymaga jednak znajomości parametrów transformacji pomiędzy
układem WGS 84 i PZ90
System GALILEO
Z założenia ma to być system konkurencyjny w stosunku do już istniejących. Będzie
w odróżnieniu od pozostałych kontrolowany prze instytucje cywilne. Segment satelitarny ma
się składać z 24 satelitów + 3 zapasowe. Nachylenie orbit 56
°
w stosunku do równika. Duża
półoś ma mieć promień 30 000 km. Konstelacją satelitów będą zarządzać dwa europejski
centra wspomagane przez pięć stacji rozmieszczonych na całej powierzchni Ziemi. Sygnał
docierający do odbiorcy będzie zawierał informacje o wiarygodności działania systemu
(takich informacji nie ma w systemach GPS i GLONASS). Będzie to miało znaczenie przy
wykorzystaniu systemu np. do nawigacji (niezawodność wyznaczenia pozycji). Sygnały będą
zawierać się w paśmie 1.2 – 1.5 GHz.
Galileo będzie oferował następujące serwisy:
Serwis otwarty (Open Service - OS) - darmowy serwis przeznaczony do wyznaczania
współrzędnych horyzontalnych z dokładnością od 15 do 4 m, wysokości z dokładnością od 35
do 8 m.
Serwis bezpieczeństwa życia (Safety of Life Service - SoL) - jego zadaniem będzie
rozszerzenie serwisu otwartego o ostrzeżenia o utracie integralności danych. Użytkownik
w czasie kilku sekund zostanie powiadomiony o spadku dokładności wyznaczanej pozycji, co
ma szczególne znaczenie np. w lotnictwie, transporcie morskim itd.
Serwis komercyjny (Commercial Service - CS) - Będzie oferował większą dokładność
(do 0,8 m w poziomie i do 1 m w pionie) oraz umożliwi przesyłanie wiadomości od stacji
naziemnych do użytkowników. Prawdopodobnie też zostanie zapewniona gwarancja jakości
fukcjonowania systemu. Dostęp do tego serwisu będzie odpłatny.
Serwis regulowany publicznie (Public Regulated Service - PRS) - będzie
przeznaczony dla wybranych użytkowników wymagających bardzo wysokiej dokładności

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
36
i wiarygodności danych.. Dostęp do niego będą miały europejskie instytucje związane
z bezpieczeństwem.
Serwis poszukiwania i ratowania (Search and Rescue Service - SAR) - umożliwi
odebranie sygnału wzywania pomocy wraz z pozycją geograficzną pławy ratunkowej
i przekazanie go do służb ratowniczych.
Obecnie system Galileo jest na etapie testowania sygnału z jednego wystrzelonego
satelity.
Europejski układ odniesienia
Europejski układ odniesienia EUREF (ETRF) jest realizowany przez ok. 70 stacji
prowadzące obserwacje laserowe księżyca i sztucznych satelitów Ziemi oraz 20 stacji VLBI
(interferometria długich baz). Obserwacje te są prowadzone w ramach Międzynarodowej
Służby Ruchu obrotowego Ziemi. Jednolity europejski układ odniesienia ma duże znaczenie
gospodarcze przede wszystkim dla międzynarodowej nawigacji powietrznej, morskiej,
a obecnie coraz częściej lądowej. Stanowi również bazę kontynentalnych badań
geodynamicznych ruchów skorupy Ziemskiej. Ma również znaczenie dla międzynarodowych
projektów inżynierskich.
Polska część sieci EUREF to sieć EUREF-POL złożona z 11 punktów rozmieszczonych
na obszarze całego kraju (osnowa zerowego rzędu). Do tych punktów dowiązano pomierzoną
satelitarnie w 1994 roku sieć POLREF złożoną z 348 punktów na obszarze kraju (sieć
pierwszego rzędu).Błędy współrzędnych punktów sieci POLREF są na poziomie 1 cm
w stosunku do osnowy zerowego rzędu. Realizują układ ETRF na epokę 89. W oparciu o tak
zrealizowany układ odniesienia na terenie Polski został wprowadzony Rozporządzeniem
Rady Ministrów z dnia 8 sierpnia 2000 r. jako jeden z elementów państwowego systemu
odniesień przestrzennych: układ współrzędnych płaskich prostokątnych, oznaczony
symbolem "2000", stosowany w pracach geodezyjnych i kartograficznych, związanych
z wykonywaniem mapy zasadniczej.
4.3.2 Pytania sprawdzające
Odpowiadając na pytania, sprawdzisz, czy jesteś przygotowany do wykonania ćwiczeń.
1.
Jakie prawa rządzą ruchem sztucznych satelitów ziemi, wymień te prawa?
2.
Co jest satelita geostacjonarny?
3.
Z jakich segmentów składa się system GPS?
4.
Co to jest pseudoodległość?
5.
Co to jest PDOP?
6.
W jaki sposób wyznacza się pseudoodległości do satelitów?
7.
Co to jest inicjalizacja odbiornika?
8.
Co oznaczają pojęcia pomiar względny, pomiar absolutny?
9.
Wymień technologie pomiarowe?
10.
Cechy technologii pomiarowych?
11.
Jakie są ograniczenia stosowania technologii GPS?
12.
Co to jest format RINEX?
13.
Wymień różnice pomiędzy systemem GPS i GLONASS?
14.
Jakie serwisy będzie oferował system GALILEO?
15.
Ile punktów tworzy sieć EUREF-POL?
16.
Jaki układ odniesienia realizują punkty POLREF?

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
37
4.3.3. Ćwiczenia
Ćwiczenie 1
Wykonaj pomiar technologią statyczną. Miejsce przeprowadzenia pomiaru wyznaczy
nauczyciel.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1)
zapoznać się z przydzielonym terenem,
2)
odszukać istniejące punkty nawiązania,
3)
zastabilizować palikami nowe punkty w miejscach umożliwiających pomiar technologią
GPS,
4)
przygotować sprzęt pomiarowy,
5)
scentrować antenę nad punktem,
6)
pomierzyć wysokość anteny nad punktem,
7)
wykonać pomiar,
8)
wypełnić dziennik pomiarowy.
Wyposażenie stanowiska pracy:
−
szkicownik,
−
odbiorniki fazowe GPS,
−
statyw, pionownik,
−
dzienniki pomiarowe,
−
instrukcje i wytyczne techniczne,
−
długopis.
Ćwiczenie 2
Wykonaj pomiar technologią szybką statyczną. Miejsce przeprowadzenia pomiaru
wyznaczy nauczyciel.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1)
zapoznać się z przydzielonym terenem,
2)
odszukać istniejące punkty nawiązania,
3)
zastabilizować palikami nowe punkty w miejscach umożliwiających pomiar technologią
GPS,
4)
przygotować sprzęt pomiarowy,
5)
scentrować antenę nad punktem,
6)
pomierzyć wysokość anteny nad punktem,
7)
wykonać pomiar,
8)
wypełnić dziennik pomiarowy.
Wyposażenie stanowiska pracy:
−
szkicownik,
−
odbiorniki fazowe GPS,
−
statyw, pionownik,
−
dzienniki pomiarowe,

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
38
−
instrukcje i wytyczne techniczne,
−
długopis.
Ćwiczenie 3
Wykonaj transmisję danych z instrumentu do komputera przy użyciu specjalnego
programu. Miejsce przeprowadzenia ćwiczenia – pracownia komputerowa.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1)
zapoznać się ze sprzętem pomiarowym,
2)
zapoznać się z programem do transmisji danych,
3)
skonfigurować instrumenty i program w celu wykonania transmisji danych,
4)
wykonać transmisję,
5)
uzupełnić dziennik pomiarowy o nazwę zbioru dyskowego,
6)
zarchiwizować dane.
Wyposażenie stanowiska pracy:
−
poradnik dla ucznia,
−
odbiorniki fazowe GPS,
−
komputer z oprogramowaniem,
−
kabel do transmisji,
−
długopis.
Ćwiczenie 4
Dokonaj
konwersji
plików
obserwacyjnych
do
formatu
RINEX.
Miejsce
przeprowadzenia ćwiczenia – pracownia komputerowa.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1)
zapoznać się z programem do konwersji danych,
2)
ustawić odpowiednie parametry konwersji w oprogramowaniu,
3)
wykonać konwersję,
4)
zarchiwizować dane.
Wyposażenie stanowiska pracy:
−
komputer z oprogramowaniem,
−
instrukcja oprogramowania,
−
długopis.
Ćwiczenie 5
Wykonaj pomiar sytuacyjno-wysokościowy z wykorzystaniem technologii RTK
oraz opracuj mapę pomierzonego obszaru techniką komputerową. Miejsce przeprowadzenia
pomiaru wyznaczy nauczyciel.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1)
zapoznać się z przydzielonym terenem,

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
39
2)
zapoznać się z obsługą zestawu RTK,
3)
odszukać istniejące punkty do transformacji,
4)
wykonać pomiar na punktach dostosowania w oparciu własną stację bazową,
5)
wykonać pomiar korzystając z poprawki z systemu ASG-PL,
6)
wykonać pomiar pikiet (prowadzić szkic polowy).
Wyposażenie stanowiska pracy:
−
szkicownik,
−
odbiorniki fazowe GPS-RTK,
−
statyw, pionownik
−
tyczka, ruletka do pomiarów ekscentrycznych niedostępnych szczegółów,
−
Instrukcje i wytyczne techniczne,
−
długopis.
Ćwiczenie 6
Wykonaj transformację współrzędnych punktów pomierzonych technologią GPS-RTK
w oparciu o punkty dostosowania. Miejsce przeprowadzenia ćwiczenia – pracownia
komputerowa.
Sposób wykonania ćwiczenia.
Aby wykonać ćwiczenie, powinieneś:
1)
zapoznać się z programem opracowania danych (transformacji),
2)
wyznaczyć parametry transformacji na punktach dostosowania,
3)
wykonać ocenę dokładności parametrów transformacji,
4)
przetransformować pikiety w oparciu o wyznaczone parametry transformacji,
5)
zarchiwizować dane.
Wyposażenie stanowiska pracy:
−
komputer z oprogramowaniem,
−
instrukcja oprogramowania,
−
długopis.
Ćwiczenie 7
Wykonaj pomiar powierzchni z wykorzystaniem odbiornika kodowego i zestawu GPS-
RTK. Miejsce przeprowadzenia ćwiczenia – teren wskazany przez nauczyciela.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1)
zapoznać się ze sprzętem pomiarowym,
2)
wykonać pomiar,
3)
porównać wyniki z pomiarów kodowych i GPS-RTK,
4)
określić procentowy błąd wyznaczenia powierzchni w stosunku do pomierzonej
powierzchni.
Wyposażenie stanowiska pracy:
−
odbiorniki satelitarne,
−
instrukcja oprogramowania,
−
długopis.

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
40
Ćwiczenie 8
Wykonaj tyczenie punktów z wykorzystaniem technologii GPS-RTK. Miejsce
przeprowadzenia ćwiczenia – teren wskazany przez nauczyciela.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1)
zapoznać się ze sprzętem pomiarowym,
2)
wykonać tyczenie wcześniej zaprojektowanych punktów.
Wyposażenie stanowiska pracy:
−
odbiorniki satelitarne,
−
instrukcja oprogramowania,
−
długopis.
4.3.4. Sprawdzian postępów
Czy potrafisz:
Tak
Nie
1)
zdefiniować pojęcie „mechanika niebieska”?
2)
podać równanie krzywej stożkowej?
3)
podać definicję prawa Keplera?
4)
podać definicję prawa dynamiki, prawa powszechnego ciążenia?
5)
scharakteryzować systemy w które wyposażony jest każdy satelita?
6)
podać zasadnicze sposoby wyznaczania pozycji technologią GPS?
7)
scharakteryzować technologię wykorzystującą pomiary kodowe?
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
41
4.4. Wysokości elipsoidalne – niwelacja satelitarna
4.4.1. Materiał nauczania
Wysokością geometryczną (elipsoidalną) nazywamy długość (odcinek normalnej
elipsoidy) mierzoną od powierzchni elipsoidy GRS’80 do punktu na fizycznej powierzchni
Ziemi. Wartości wysokości elipsoidalną uzyskujemy bezpośrednio z pomiarów satelitarnych.
Mimo prostoty pomiaru niestety wysokości te mają poważną wadę – nie są związane
z ziemskim polem siły ciężkości (tylko z matematycznym modelem - elipsoidą). Nie można
ich stosować w inżynierii. Wyznaczenie wysokości z pomiarów satelitarnych nie jest
zatem niwelacją.
Niwelacja satelitarna jest procedurą wyznaczenia wysokości ortometrycznych
z wysokości geometrycznych oraz dodatkowych informacji o ziemskim polu siły
ciężkości. W praktyce procedura sprowadza się do wyznaczenia odstępu N geoidy od
elipsoidy GRS’80.
Wyznaczenie undulacji N jest procedurą dość skomplikowaną i nie mieści się w zakresie
omawianego tematu.
Na niewielkich obszarach można jednak stosować uproszczone metody wyznaczenia
geoidy. Jeżeli na punktach o znanych wysokościach ortometrycznych wykonamy pomiar
satelitarny (wyznaczymy wysokość elipsoidalną oraz współrzędne B i L) to korzystając
z powyższego wzoru uzyskamy odstęp geoidy od elipsoidy. Stosując teraz procedurę
interpolacji liniowej (znaną z matematyki) możemy wyznaczyć wartości N na pozostałych
punktach, które nie mają wysokości ortometrycznej, a zostały pomierzone satelitarnie.
Obecnie w naszym kraju dostępny jest również model geoidy, czyli algorytm obliczenia
odstępu geoidy od elipsoidy na podstawie znanych współrzędnych geodezyjnych satelitarnie
mierzonych punktów. Model ten można wykorzystywać do prac inżynierskich Błąd
określenia wysokości z modelu geoidy jest na poziomie 10 cm.
4.4.2 Pytania sprawdzające
Odpowiadając na pytania, sprawdzisz, czy jesteś przygotowany do wykonania ćwiczeń.
1.
Co to jest niwelacja satelitarna?
2.
Dlaczego wysokości elipsoidalnych nie można stosować w pomiarach inżynieryjnych?
3.
Jaka jest zależność matematyczna pomiędzy wysokością elipsoidalną i ortometryczną?
4.
Co to jest model geoidy?
5.
W jaki sposób wyznacza się wysokości ortometryczne na niewielkich obszarach?

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
42
4.4.3. Ćwiczenia
Ćwiczenie 1
Wykonaj wyznaczenie wysokości pikiet w oparciu o obowiązujący model geoidy.
Miejsce przeprowadzenia ćwiczenia – pracownia komputerowa.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1)
zapoznać się z programem opracowania danych (obowiązujący model geoidy),
2)
wykonać obliczenia wysokości dla punktów mierzonych technologią GPS-RTK,
3)
wykreślić mapę sytuacyjno-wysokościową,
4)
zarchiwizować dane.
Wyposażenie stanowiska pracy:
−
komputer z oprogramowaniem,
−
instrukcja oprogramowania,
−
długopis.
4.4.4 Sprawdzian postępów
Czy potrafisz:
Tak
Nie
1)
wyjaśnić co oznacza pojęcie niwelacja satelitarna?
2)
wyjaśnić model geoidy?
3)
określić jak wyznacza się wysokości ortometryczne na niewielkich
obszarach?
4)
określić
zależność
matematyczną
pomiędzy
wysokością
elipsoidalną i ortometryczną?

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
43
4.5. Aktywna sieć geodezyjna (ASG)
4.5.1. Materiał nauczania
Aktywna Sieć Geodezyjna (ASG) jest przedsięwzięciem realizowanym przez Główny
Urząd Geodezji i Kartografii jako Polska część Europejskiego systemu precyzyjnego
pozycjonowania EUPOS (system stacji permanentnych działający w wielu krajach
europejskich).
ASG pozwoli użytkownikom korzystać z trzech rodzajów usług:
−
pomiarów RTK z wykorzystaniem danych ze stacji referencyjnych (dokładność
wyznaczenia współrzędnych czasie rzeczywistym na poziomie 5 cm w oparciu o tzw.
poprawkę powierzchniową (poprawka ta jest wyznaczana na przybliżone współrzędne
odbiornika ruchomego w oparciu o trzy najbliższe stacje systemu ASG)),
−
pomiarów DGPS z wykorzystaniem danych ze stacji referencyjnych (dokładność
wyznaczenia współrzędnych w czasie rzeczywistym na poziomie 3 m),
−
wykonania obliczeń z obserwacji statycznych w nawiązaniu do stacji permanentnych
ASG-PL.
Składa się z trzech segmentów:
1.
Segment stacji referencyjnych
−
86 stacji referencyjnych średnio, co 70-80 km wyposażonych w odbiornik
geodezyjny L1/L2, antenę, komputer, zasilenie awaryjne i Internet.
2.
Segment zarządzania siecią
−
Archiwizacja i udostępnianie danych ze stacji referencyjnych,
−
Kontrola jakości obserwacji,
−
Obliczenia danych nadesłanych przez użytkowników,
−
Prowadzenie serwisu WWW,
−
Dystrybucja poprawek różnicowych DGNSS.
3.
Segment użytkownika
−
Odbiorniki satelitarne różnego typu (geodezyjne, nawigacyjne, turystyczne).
Aktywna sieć geodezyjna będzie systemem w pełni zautomatyzowanym. Przewiduje się,
ż
e użytkownikami systemu będą zarówno osoby fizyczne (geodeci, kierowcy turyści) jak
również instytucje i firmy, dla których system ASG będzie pomocny w sprawnym
zarządzaniu swoją działalnością. Przede wszystkim system ASG będzie zabezpieczał cele
nawigacji lądowej oraz będzie wykorzystywany przez służby kryzysowe (policja, straż
pożarna).
4.5.2 Pytania sprawdzające
Odpowiadając na pytania, sprawdzisz, czy jesteś przygotowany do wykonania ćwiczeń.
1.
Co to jest Aktywna Sieć Geodezyjna?
2.
Wymień segmenty ASG?
3.
Wymień usługi ASG?
4.
Z ilu stacji składa się ASG?
5.
Jakie dokładności wyznaczenia pozycji będzie oferować ASG?
6.
Jakie cele ma spełniać segment zarządzania siecią?

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
44
4.5.3. Ćwiczenia
Ćwiczenie 1
Wykonaj opracowanie obserwacji w systemie ASG-PL. Miejsce przeprowadzenia
ć
wiczenia – pracownia komputerowa.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1)
zapoznać się ze stroną internetową systemu ASG-PL,
2)
zalogować się do systemu,
3)
wysłać dane w formacie RINEX,
4)
wpisać typ anteny,
5)
wpisać wysokość anteny według wskazówek.
Wyposażenie stanowiska pracy:
−
komputer z dostępem do Internetu,
−
instrukcja oprogramowania,
−
długopis.
4.5.4. Sprawdzian postępów
Czy potrafisz:
Tak
Nie
1)
określić przez kogo realizowana jest Aktywna Sieć Geodezyjna?
2)
określić jakie rodzaje usług umożliwia Aktywna Sieć Geodezyjna?
3)
scharakteryzować segmenty Aktywnej Sieci Geodezyjnej?

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
45
5. SPRAWDZIAN OSIĄGNIĘĆ
INSTRUKCJA DLA UCZNIA
1.
Przeczytaj uważnie instrukcję.
2.
Podpisz imieniem i nazwiskiem kartę odpowiedzi.
3.
Zapoznaj się z zestawem pytań testowych.
4.
Test zawiera 20 zadań o różnym stopniu trudności. Są to zadania wielokrotnego wyboru.
Do każdego zadania dołączone są cztery możliwości odpowiedzi, tylko jedna jest
prawidłowa.
5.
Udzielaj odpowiedzi tylko na załączonej karcie odpowiedzi, stawiając w odpowiedniej
rubryce znak X. W przypadku pomyłki należy błędną odpowiedź zaznaczyć kółkiem,
a następnie ponownie zakreślić odpowiedź prawidłową.
6.
Pracuj samodzielnie, bo tylko wtedy będziesz miał satysfakcję z wykonanego zadania.
7.
Kiedy udzielenie odpowiedzi będzie sprawiało trudność, wtedy odłóż jego rozwiązanie na
później i wróć do niego, gdy zostanie czas wolny.
8.
Na rozwiązanie testu masz 45 minut.
Powodzenia!
ZESTAW ZADAŃ TESTOWYCH
1.
Płaszczyzna prostopadła do kierunku pionu w miejscu obserwacji, zawierająca limbus
spoziomowanego instrumentu to
a)
płaszczyzna równika niebieskiego.
b)
równoleżnik niebieski.
c)
płaszczyzna horyzontu.
d)
płaszczyzna równika ziemskiego.
2.
Układ współrzędnych astronomicznych horyzontalnych umożliwia zdefiniowanie
położenia gwiazdy na sferze niebieskiej za pomocą dwóch wielkości
a)
azymutu gwiazdy (A) i wysokości (h).
b)
deklinacji (
δ
) i rektascensji (
α
).
c)
deklinacji (
δ
) i kąta godzinnego (t).
d)
deklinacji i długości geodezyjnej.
3.
Układ współrzędnych astronomicznych służący do katalogowania gwiazd to układ
a)
horyzontalny.
b)
równikowy ekwinokcja lny.
c)
równikowy godzinny.
d)
2000.
4.
Punkt przecięcia płaszczyzny równika niebieskiego płaszczyzną ekliptyki (pozornego
ruchu Słońca) nosi nazwę
a)
Punktu perigeum.
b)
Punktu Barana.
c)
Nadiru.
d)
Almukantaratu.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
46
5.
Geoida to
a)
powierzchnia o stałym przyspieszeniu siły ciężkości.
b)
powierzchnia elipsoidy obrotowej.
c)
powierzchnia sfery.
d)
powierzchnia o stałym potencjale siły ciężkości.
6.
Liczba wyrażająca pracę w polu potencjalnym to
a)
liczba geopotencjalna.
b)
wysokość.
c)
przyspieszenie siły ciężkości na biegunie.
d)
przyspieszenie normalne.
7.
Aby wyznaczyć wysokość punktu w systemie wysokości ortometrycznych niezbędna jest
znajomość
a)
przeciętna wartość normalnego (modelowego) przyśpieszenia siły ciężkości wzdłuż
linii pionu.
b)
przybliżona wartość przyśpieszenia siły ciężkości równa 10 m/s
2
.
c)
przeciętna wartość rzeczywistego przyśpieszenia siły ciężkości wzdłuż linii pionu.
d)
wartość normalnego przyspieszenia siły ciężkości dla punktu położonego na
poziomie morza na szerokości 45°.
8.
Za geometryczne przybliżenie kształtu Ziemi przyjmuje się w geodezji powierzchnię
a)
elipsoidy obrotowej o niewielkim spłaszczeniu.
b)
geoidy.
c)
sfery.
d)
stałego potencjału.
9.
Kąt jaki tworzy normalna do elipsoidy w danym punkcie z płaszczyzną równika
geodezyjnego to
a)
długość geodezyjna.
b)
szerokość geodezyjna.
c)
azymut geodezyjny.
d)
kąt zenitalny.
10.
Aktualnie obowiązująca w Polsce powierzchnia odniesienia dla prac geodezyjnych to
powierzchnia
a)
sfery.
b)
elipsoidy obrotowej Krasowskiego.
c)
płaszczyzny.
d)
elipsoidy obrotowej GRS 80.
11.
Teoretyczny ruch satelity po orbicie odbywa się ze stałą
a)
prędkością kątową.
b)
prędkością polową.
c)
prędkością liniową.
d)
deklinacją.

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
47
12.
Satelita o okresie obiegu równemu dobie gwiazdowej i orbicie nachylonej do równika
pod kątem 0° to satelita
a)
systemu GPS.
b)
ziemski.
c)
geostacjonarny.
d)
systemu GLONASS.
13.
Wyznaczanie orbit i parametrów zegarów satelitów GPS to główne zadania
a)
segmentu kosmicznego.
b)
segmentu stacji kontrolnych.
c)
użytkowników.
d)
systemu EUPOS.
14.
Najdokładniejsze sposoby wyznaczania pozycji za pomocą systemu GPS wykorzystują
pomiary
a)
bezwzględne, kodowe.
b)
bezwzględne, fazowe.
c)
względne, kodowe.
d)
względne, fazowe.
15.
Wyznaczenie trójwymiarowej pozycji za pomocą systemu GPS możliwe jest przy
pomiarze pseudoodległości do
a)
przynajmniej 4 satelitów.
b)
przynajmniej 3 satelitów.
c)
przynajmniej 5 satelitów.
d)
przynajmniej 7 satelitów.
16.
Inicjalizacja odbiornika w przypadku pomiarów fazowych to
a)
włączenie odbiornika GPS.
b)
wyznaczeniem nieoznaczoności (pełnej liczby cykli fazowych obserwowanego
satelity).
c)
wyznaczeniem poprawki zegara.
d)
wyznaczeniem wysokości anteny nad znakiem pomiarowym.
17.
Przyjmuje się, że korzystna konfiguracja obserwowanych satelitów występuje dla
współczynnika PDOP
a)
PDOP>7.
b)
PDOP=0 .
c)
PDOP>10.
d)
PDOP<7.
18.
Ciągła bezprzewodowa łączność między stacją bazową a odbiornikiem ruchomym nie
jest wymagana przy technologii pomiaru
a)
RTK.
b)
DGPS.
c)
szybkiej statycznej.
d)
zawsze jest wymagana.

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
48
19.
Pojęcie wielodrożności sygnału GPS wiąże się zakłóceniami odbieranego sygnału
spowodowanymi
a)
odbiciem sygnału od przeszkód terenowych.
b)
przejściem fali przez jonosferę.
c)
przejściem fali przez troposferę.
d)
wyładowaniami atmosferycznymi.
20.
Wyznaczenie wysokości ortometrycznych na podstawie wysokości geometrycznych
(uzyskanych z GPS) wiąże się z wyznaczeniem
a)
odstępu między elipsoidą GRS’80 a elipsoidą WGS 84.
b)
odstępu geoidy od elipsoidy WGS 84.
c)
przeciętnej wartość przyśpieszenia rzeczywistego na odcinku linii pionu
wyznaczanego punktu.
d)
wysokości do satelity geostacjonarnego.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
49
KARTA ODPOWIEDZI
Imię i nazwisko:...........................................................................................................................
Stosowanie technologii GPS w pomiarach geodezyjnych
Zakreśl poprawną odpowiedź.
Nr
zadania
Odpowiedź
Punkty
1.
a
b
c
d
2.
a
b
c
d
3.
a
b
c
d
4.
a
b
c
d
5.
a
b
c
d
6.
a
b
c
d
7.
a
b
c
d
8.
a
b
c
d
9.
a
b
c
d
10.
a
b
c
d
11.
a
b
c
d
12.
a
b
c
d
13.
a
b
c
d
14.
a
b
c
d
15.
a
b
c
d
16.
a
b
c
d
17.
a
b
c
d
18.
a
b
c
d
19.
a
b
c
d
20.
a
b
c
d
Razem:

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
50
6.
LITERATURA
1.
Czarnecki, K.: Geodezja współczesna w zarycie. Wiedza i śycie, Warszawa 1996
2.
Góral W, Szewczyk J.: Zastosowanie technologii GPS w precyzyjnych pomiarach
deformacji. Uczelniane Wydawnictwa Naukowo-Dydaktyczne AGH, Kraków 2004
3.
Leick, A.: GPS Satelite Surveying, Second Edition. A Wiley-Interscience Publication
1995
5
Lamparski, J.: System Navstar GPS. Naukowe WSO im. Gen. J. Bema, Toruń 1997
6
Specht, C.: System GPS. Bernardinum, Pelplin 2007
Wyszukiwarka
Podobne podstrony:
POMIARY, GEODEZJA(14)
Planowanie Kampanii Pomiarow GPS, Uczelnia, Geodezja satelitarna
2 1 Podstawowe czynności pomiarowe w geodezji
Dzienniki pomiarowe Geodezja Szkic polowy
Metody Pomiarowe, Geodezja
14 Stosowanie technik laczenia Nieznany (2)
4 00 FABRYKACJA, STOSOWANE TECHNOLOGIE
Elektroniczna technika pomiarowa -, geodezja, Elektroniczna technika pomiarowa
Przeglad stosowanych technologi Nieznany
14 Stosowanie wybranych form te Nieznany (2)
Maszyny stosowane w technologii odlewania rotacyjnego, Studia, SEMESTR 3, TPM, prezentacja polimery,
KĄTY Z POMIARÓW, Geodezja i Kartografia, ETP
TECHNIKI POMIAROWE W GEODEZJI, Techniki pomiarowe w geodezji
9 Nape%b3niacze stosowane w technologii sztywnych pianek PUR
10 Wykorzystanie teorii błędów do opracowania pomiarów geodezyjnych
RAPORT DOTYCZĄCY STOSOWANIA TECHNOLOGII TELEINFORMACYJNEJ W PRACY NAUCZYCIELA
GPS-metody, Geodezja, 01-2sem, dżi pi es
Identyfikacja Procesów Technologicznych, 08 Pomiar gestosci prawdopodobienstwa
więcej podobnych podstron