1
Kinematyka i dynamika układów
mechatronicznych
Jacek Cieślik
Katedra Robotyki i Mechatroniki
WIMiR, AGH,
Kraków, Al. Mickiewicza 30
czwartek, 20 czerwca 2013
Podsumowanie
Większośd zadao i projektów technicznych mechanizmów stanowi kombinację
syntezy i analizy.
Na większości studiów inżynierskich w wykładach z TMM omawia się przede
wszystkim techniki analizy kinematycznej w rozmaitych sytuacjach.
Teoretycznie, nie można analizowad całości urządzenia, dopóki nie zostanie
ono syntetyzowane do istnienia.
Wiele problemów projektowania maszyn wymaga utworzenia urządzenia
o określonych właściwościach ruchu – tor ruchu, prędkośd i przyspieszenie
w określonych położeniach.
W ogólnym przypadku możliwości są nieograniczone, ale wspólnym
mianownikiem jest często koniecznośd wygenerowania i powiązania żądanych
ruchów.
Poniżej zostanie przedstawionych kilka prostych technik syntezy do utworzenia
potencjalnych rozwiązao projektowych dla niektórych typowych zastosowao
kinematycznych.
Synteza mechanizmu
20/06/2013
2
Jacek Cieślik
Podsumowanie
Dostępne na rynku programy, takie jak Working Model®, WATT czy
visualNastran lub chodby SAM pozwalają na szybką analizę kinematyczną
proponowanego projektu mechanicznego.
Proces projektowy przyjmuje charakter analizy jakościowej poprzez kolejne
analizy projektów, które tak naprawdę są kolejnymi iteracjami syntezy i analizy.
Bardzo wiele rozwiązao procesu może byd przebadane w krótkim czasie za
pomocą programów (narzędzi) wspomaganych komputerowo (CAD/CAE) .
Synteza mechanizmu
20/06/2013
3
Jacek Cieślik
Podsumowanie
Pojęcie syntezy wg typów odnosi się do definicji właściwego rodzaju
mechanizmu najlepiej przystosowanego do danego problemu i jest formą
syntezy jakościowej.
Jest to najtrudniejsze zadanie dla projektantów, ponieważ wymaga pewnego
doświadczenia i wiedzy na temat różnych rodzajów mechanizmów, które
istnieją i które również mogą byd wykonalne z punktu widzenia wydajności
i efektywności produkcji.
Jako przykład niech posłuży zadanie zaprojektowania urządzenie do śledzenia
liniowego ruchu części na przenośniku taśmowym i rozpylanie powłoki
chemicznej nad mijanym elementem.
Mechanizm musi byd sporządzony tak, aby utrzymywał stałą prędkośd z dobrą
(zadaną) dokładnością i powtarzalnością.
Rozwiązanie musi byd praktyczne (realne, możliwe do zrealizowania,
wiarygodne). Ponadto zwykle dodatkowym wymogiem jest to, że rozwiązanie
musi byd tanie.
Synteza wg typów
20/06/2013
4
Jacek Cieślik
Podsumowanie
Zadanie może potencjalnie byd wykonane przez którekolwiek z następujących
urządzeo:
- Płaski mechanizm realizujący linię prostą,
- Krzywka i popychacz,
- Siłownik pneumatyczny,
- Siłownik hydrauliczny,
- Robot,
- Cewka (solenoid) – elektrozawór.
Każde z tych rozwiązao może odbiegad od optymalnego, a nawet może byd
zupełnie niepraktyczne.
Synteza wg typów
20/06/2013
5
Jacek Cieślik
Podsumowanie
– Płaski mechanizm realizujący linię prostą może okazad się zbyt duży i mied
niepożądane przyspieszenia.
– Krzywka i popychacz będą kosztowne (wykonanie), chod dokładne oraz
powtarzalne.
– Siłownik pneumatyczny (cylinder) jest tani, ale bez odpowiedniego
wyposażenia jest głośny i mało dokładny (pozycjonowanie, sensory).
– Siłownik hydrauliczny jest droższy i również robot jest kosztowny.
– Elektrozawór jest tani, ma jednak wysokie obciążenia udarowe i dużą
prędkośd działania (uderzenia).
Wybór typu urządzenia może mied duży wpływ na jakośd projektu.
Nieodpowiedni wybór typu urzędzenia na tym etapie syntezy może w
przyszłości powodowad problemy nie do rozwiązania .
Urządzenie mogłoby stad się nieprzydatne i byd złomowane po zakooczeniu
projektu, przy dużym nakładzie finansowym.
Synteza wg typów
20/06/2013
6
Jacek Cieślik
2
Podsumowanie
Pojęcie syntezy ilościowej lub analitycznej oznacza generowanie jednego
lub kilku rozwiązao danego typu, które na pewno są odpowiednie do
problemu i dla których istnieje określony algorytm syntezy.
Ten typ rozwiązania można ocenić, jeśli istnieje układ równao (kilka), co
pozwala na uzyskanie odpowiedzi w postaci konkretnych wartości liczbowych.
Ocena czy odpowiedź jest dobra lub odpowiednia zależy od projektanta
i wymaga analizy oraz powtórzenia w celu jej optymalizacji.
Często dostępna jest mniejsza liczba równao niż liczba potencjalnych
zmiennych. W takim przypadku należy przyjąd sensowne wartości dla tylu
niewiadomych, aby zmniejszyd (dostosowad) liczbę pozostałych niewiadomych
do ilości dostępnych równao. Niektóre oceny jakościowe wchodzą w tym
przypadku do syntezy.
Z wyjątkiem bardzo prostych przypadków, do wykonania syntezy ilościowej
potrzebne są narzędzia CAD/CAE. Szybkośd obliczeo tych programów pozwala
na analizę wyników wielu projektów mechanizmu w krótkim czasie oraz
przyspiesza iteracje zmierzające do rozwiązania optymalnego.
Synteza ilościowa lub analityczna
20/06/2013
7
Jacek Cieślik
Podsumowanie
Synteza wymiarowa płaskiego mechanizmu ma na celu określenie proporcji
(długości) łączy niezbędnych do osiągnięcia pożądanych ruchów.
Może byd formą ilościową syntezy jeżeli algorytm jest zdefiniowany dla
danego problemu. Może też byd formą syntezy jakościowej jeżeli jest więcej
zmiennych niż równao.
Ta ostatnia sytuacja jest bardziej powszechna dla mechanizmów płaskich
(Synteza wymiarowa krzywek jest ilościowa).
Synteza wymiarowa zakłada, że za pośrednictwem syntezy według typu,
zostało już ustalone, że mechanizm płaski (lub krzywka) jest najbardziej
odpowiednim rozwiązaniem problemu.
W dalszym ciągu zostanie omówiona w szczegółach graficzna Synteza
wymiarowa mechanizmów płaskich.
Synteza wymiarowa
20/06/2013
8
Jacek Cieślik
Podsumowanie
Tworzenie funkcji jest definiowane jako korelacja ruchu wejściowego z
ruchem wyjściowym mechanizmu.
Generator funkcji jest koncepcyjnie "czarną skrzynką", która dostarcza dający
się przewidzied wyjściową odpowiedź na znane wejście.
Tworzenie ścieżki (trajektorii) jest zdefiniowane jako sterowanie punktem
na płaszczyźnie tak, że postępuje on po pewnej określonej ścieżce.
Zwykle jest to realizowane przez mechanizm czworoboku przegubowego,
w którym punkt na łączniku śledzi pożądaną drogę (postępuje po drodze).
Należy zauważyd, że przy tworzeniu ścieżki nie są podejmowane próby
kontroli kierunku (orientacji) członu, który zawiera punkt obserwacji.
Zwykle kontroluje się czas przybycia punktu do poszczególnych miejsc na
tworzonej ścieżce (osiągnięcie pozycji). Ten przypadek nazywa się tworzeniem
ścieżki z wymaganym czasem dotarcia i jest analogiczny do metody tworzenia
funkcji jeśli została określona szczególna funkcja wyjścia.
Tworzenie funkcji, ścieżki i ruchu punktu mechanizmu
20/06/2013
9
Jacek Cieślik
Podsumowanie
Tworzenie ruchu mechanizmu jest zdefiniowane jako kontrola linii w
płaszczyźnie tak, że zakłada się pewien określony zestaw następujących po
sobie (sekwencyjnych) pozycji.
Tutaj orientacja członu zawierającego linię jest ważna.
Jest to bardziej ogólny problem niż poprzednio omawiane tworzenie ścieżki.
W rzeczywistości tworzenie ścieżki jest podzbiorem tworzenia ruchu
mechanizmu.
Przykład problemu tworzenia ruchu mechanizmu - sterowanie łyżką koparki.
Łyżka musi przyjąd zestaw pozycji aby wykopad, podnieśd, przemieścid i
zrzucid wydobytą ziemię.
W założeniach przyjęto, że ruch linii namalowanej na bocznej stronie łyżki
posłuży do obserwacji pożądanych pozycje. Zwykle stosuje się rozwiązanie w
postaci płaskiego mechanizmu złożonego z członów połączonych przegubowo.
Tworzenie funkcji, ścieżki i ruchu punktu mechanizmu
20/06/2013
10
Jacek Cieślik
Podsumowanie
Poprzednio omawiane zagadnienie kontroli ruch zakłada, że pożądane ruchy
są płaskie (2-D).
Żyjemy w trójwymiarowym świecie i nasze mechanizmy muszą funkcjonowad
w świecie trójwymiarowym.
Mechanizmy przestrzenne są urządzeniami trójwymiarowymi.
Ich konstrukcja i analiza jest znacznie bardziej skomplikowana niż
mechanizmów płaskich, które są urządzeniami dwuwymiarowymi.
Badanie mechanizmów przestrzennych jest poza zakresem niniejszego
wprowadzającego wykładu.
Badanie mechanizmów przestrzennych nie stanowi ograniczenia, jak to się
może wydawad, ponieważ wiele urządzeo trójwymiarowych jest budowane
z wielu zestawów połączonych ze sobą urządzeo dwuwymiarowych.
Mechanizmy płaskie a mechanizmy przestrzenne
6/20/2013
11
Jacek Cieślik
Podsumowanie
Ważny test, opisany poniżej, jest stosowany w ramach procedur syntezy.
Jest niezbędny do sprawdzenia, czy mechanizm płaski w rzeczywistości może
dotrzed do wszystkich z wymienionych pozycji, nie napotykając ograniczeo
lub przełączenia pozycji, zwany również stacjonarną konfiguracją.
Procedury syntezy mechanizmu często tylko zapewniają, że poszczególne
pozycje określone zostaną uzyskane. Nie mówią nic o zachowaniu płaskiego
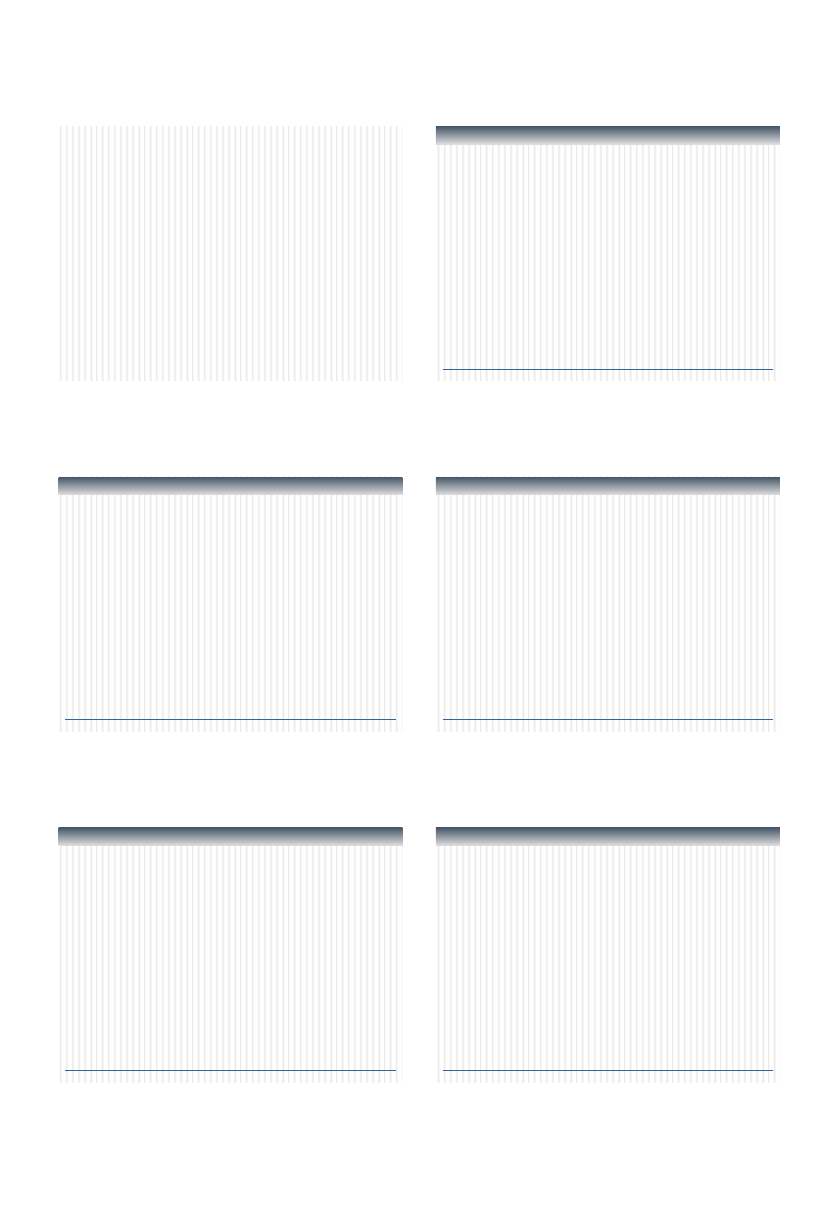
mechanizmu między tymi pozycjami. Rysunek 3-1 pokazuje mechanizm
czworoboku płaskiego w dowolnej pozycji CD (linie przerywane), a także
w dwóch pozycjach przełącznika, C
1
D
1
(czarne linie) i C
2
D
2
(linie ciągłe).
Warunki ograniczające – przełączanie, punkty zwrotne
20/06/2013
12
Jacek Cieślik
3
Podsumowanie
Pozycje przełączania są określone przez współliniowośd dwóch członów w
ruchu. Mechanizm czworoboku z dwoma lub trzema członami (wahaczami)
będzie miał co najmniej dwie z tych pozycji przełączania, w którym płaski
mechanizm posiada trójkątną konfigurację.
Kiedy w trójkątnym położeniu, nie będzie możliwe dalszy ruch w jednym
kierunku jednego z członów - wahacz (jeden człon 2 z pozycji C
1
D
1
lub człon 4
z pozycji C
2
D
2
).
Pozostały człon (wahacz) będzie musiał byd tak poprowadzony, aby
wyprowadzid mechanizm z położenia przełączania (punkt zwrotny).
Przełączanie, punkty zwrotne
20/06/2013
13
Jacek Cieślik
Podsumowanie
Płaski mechanizm czworoboku korba-wahacz obejmie również dwie pozycje
przełączania jak pokazano na rys. 3-1b, gdy najkrótszy człon (korba O
2
C) jest
współliniowy z łącznikiem CD (człon 3) albo przedłużony współliniowo
(O
2
C
2
D
2
) lub nakłada się współliniowo (O
2
C
1
D
1
).
Nie może z powrotem poruszad się od wahacza O
4
D (człon 4) tych
współliniowych pozycji . Ale gdy korba O
2
C (człon 2) jest napędzana,
to możliwe jest przejście przez obydwa punkty zwrotne.
Należy zauważyd, że te pozycje przełączania (punkty zwrotne) również
określają granice ruchu napędzanego wahacza (człon 4), w którym jego
prędkośd kątowa będzie przechodzid przez zero.
Przełączanie, punkty zwrotne
20/06/2013
14
Jacek Cieślik
Podsumowanie
Po dokonaniu syntezy mechanizmu dwu-lub trzy-wahaczowego rozwiązanie
problemu pozycji (problem generacji ruchu), należy sprawdzid obecnośd
pozycji przełączania (punkt zwrotny).
Łatwym sposobem sprawdzenia problemu jest użycie narzędzi CAE,
takich jak np. visualNastran , Working Model.
Ważne jest uświadomienie sobie, że warunek przełączania jest stanem
niepożądanym, jeżeli uniemożliwia przejście mechanizmu płaskiego się
z jednej z wybranej pozycji do drugiej.
Może to stworzyd własności samohamowne, gdy mechanizm płaski zostanie
przemieszczony nieco poza pozycję przełączania (punkt zwrotny).
Każda próba odwrócenia ruchu mechanizmu powoduje możliwośd powstania
dwóch ruchów ( w przeciwnych kierunkach.
Przełączanie, punkty zwrotne
20/06/2013
15
Jacek Cieślik
Podsumowanie
Inny przydatnym testem, który można szybko zastosowad do mechanizmu
płaskiego, aby ocenid jego jakośd jest pomiar jego kąta transmisji.
Można to zrobid analitycznie lub graficznie (w sposób przybliżony). Należy
przedłużyd człony poza miejsce obrotu w parze kinematycznej i zmierzyd kąt.
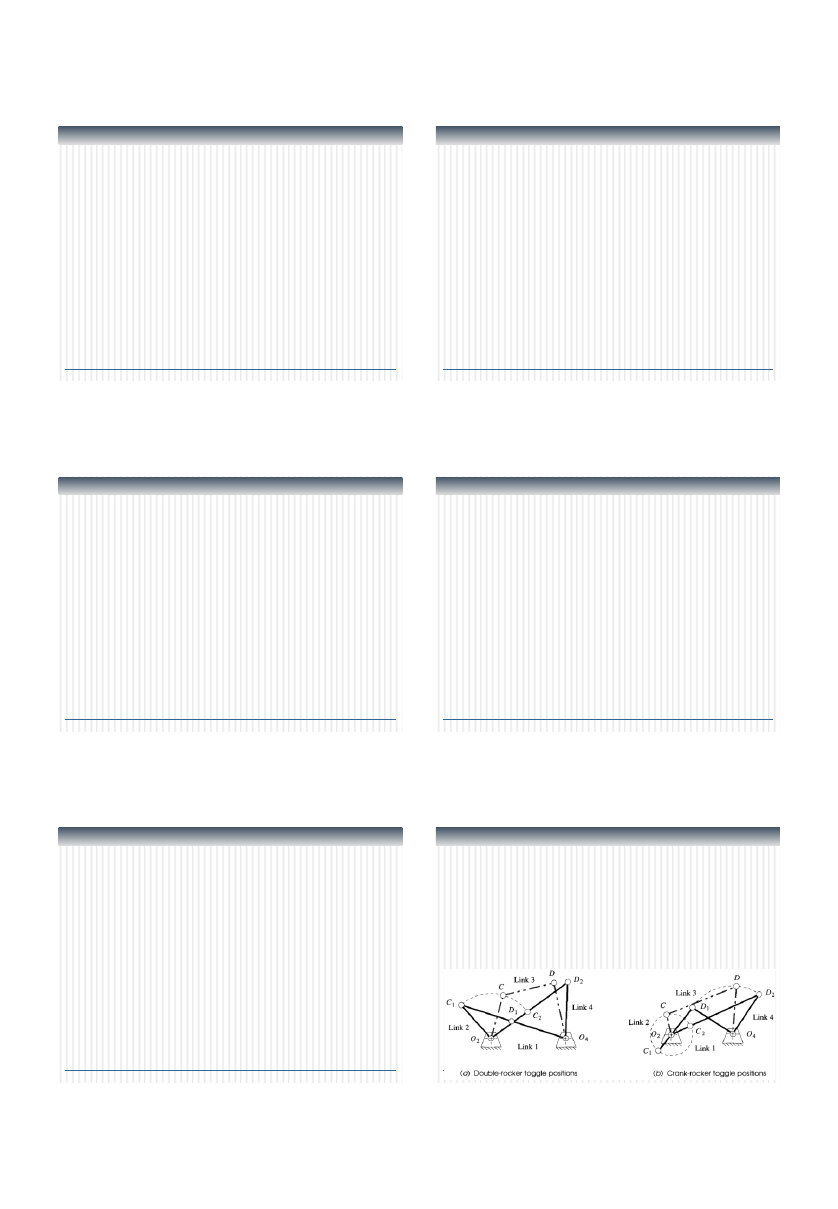
μ - kąt transmisji przedstawiono na rys. 3-2a. Jest definiowany jako kąt między
członem wyjściowym i łącznikiem.
Jest to zazwyczaj wartośd bezwzględna kąta ostrego z pary kątów
na skrzyżowaniu dwóch członów i zmienia się w sposób ciągły od minimalnej
do maksymalnej wartości w miarę jak mechanizm przechodzi przez cały zakres
ruchu.
Jest to miara jakości siły i prędkości transmisji w parze kinematycznej
(połączeniu członów).
Warunki ograniczające – Kąt
20/06/2013
16
Jacek Cieślik
Podsumowanie
Rys. 3-2. Kąt transmisji dla mechanizmu czworoboku przegubowego
Warunki ograniczające – Kąt
20/06/2013
17
Jacek Cieślik
Podsumowanie
Rysunek 3-2b przedstawia T
2
moment obrotowy członu 2. Nawet zanim ruchu
się rozpocznie powoduje powstanie statycznej, współliniowej siły F
34
oddziaływania członu 3 na człon 4 w punkcie D. Jego promieniowe (normalne)
i styczne współrzędne F
t34
i F
r34
są rozwinięte równolegle i prostopadle do
członu 4.
Wymaga się, aby wszystkie składowe siły F
34
powodowały moment obrotowy
T
4
na człon 4.
Tylko składowa styczna powoduje moment obrotowy na człon 4. Składowa
normalna F
r34
powoduje rozciąganie lub ściskanie w członie 4,powoduje
zwiększenie tarcia obrotu i nie wpływa na moment wyjściowy.
Dlatego optymalna wartośd dla kąta transmisji wynosi 90 °. Jeżeli μ jest
mniejsze niż 45 ° to składowa normaln będzie większa niż składowa styczna.
Większośd projektantów maszyn starad się utrzymad minimalny kąt transmisji
powyżej 40 ° dla sprawnego funkcjonowania mechanizmu i przenoszenie siły.
Warunki ograniczające – Kąt
20/06/2013
18
Jacek Cieślik
4
Podsumowanie
Synteza wymiarowa płaskiego mechanizmu polega na określeniu proporcji
(długości) członów niezbędnych do osiągnięcia pożądanych ruchów.
Zakłada się, że dla tego rodzaj syntezy płaskie mechanizmy są najbardziej
odpowiednim rozwiązaniem problemu.
Istnieje wiele technik do wykonania tego zadania syntezy wymiarowej
dla mechanizmów czworoboku przegubowego.
Najprostsze i najszybsze są metody graficzne. Działają one do trzech położeo
projektowych mechanizmu. Analityczne podejście do syntezy wymaga użycia
programów komputerowych.
Należy pamiętad, że zasady stosowane w tych technikach graficznych syntezy
są takie jak dla geometrii euklidesowej. Zasady podziału odcinków i kątów,
własności linii równoległych i prostopadłych i definicje łuków, itd. są potrzebne
do wygenerowania tych mechanizmów płaskich.
Synteza wymiarowa
20/06/2013
19
Jacek Cieślik
Podsumowanie
Syntezę na podstawie dwóch pozycji można podzielid na dwie kategorie:
- wahacz na wyjściu (pełny obrót),
- łącznik na wyjściu (ruchu złożony).
Wahacz na wyjściu jest najbardziej odpowiedni do sytuacji, w których
mechanizm w układzie korba-wahacz jest pożądany i jest to łatwy przypadek
generowania funkcji, w którym funkcja wyjścia jest definiowana jako dwa
oddzielne położenia wahacza.
Łącznik na wyjściu jest bardziej ogólnym i prostym przypadkiem generowania
ruchu, w którym dwa położenia linii w płaszczyźnie są definiowane jako
wyjście.
Takie rozwiązanie często prowadzi do układu potrójnego wahacza. Jednak
czworobok przegubowy w układzie potrójnego wahacza może byd napędzany
silnikiem poprzez dodanie dwójki (łaocuch złożony z dwóch członów),
co sprawia, że koocowy wynik ma postad mechanizmu Watta (sześd członów)
zawierający czworobok przegubowy, jako element składowy (pod-łaocuch).
Synteza wymiarowa – Synteza na podstawie dwóch położeo
20/06/2013
20
Jacek Cieślik
Podsumowanie
Mechanizm czworoboku przegubowego jest najprostszym możliwym rodzajem
płaskiego mechanizmu połączonego za pomocą sworzni o jednym stopniu
swobody.
Występuje w różnych odmianach, jak np. mechanizm korbowo-suwakowy.
Jest to najbardziej powszechne urządzenie stosowane w maszynach.
Jest wszechstronny pod względem osiąganych rodzajów ruchu i powinien byd
jednym z pierwszych badanych rozwiązao.
Warunek Grashofa przewiduje zachowanie (obracanie się) mechanizmu
czworoboku przegubowego (w różnych wersjach) na podstawie długości
członów.
S = długośd najkrótszego członu (połączonego z podstawą),
L = długośd najdłuższego członu,
P = długośd jednego z pozostałych członów, Q = długośd ostatniego członu
Jeżeli:
S + L ≤ P + Q
to mechanizm jest mechanizmem Grashofa i co najmniej jeden człon będzie w
stanie dokonad pełnego obrotu względem osi należącej do podstawy.
Taki mechanizm nosi nazwę - łaocuch kinematyczny klasy I.
Jeśli nierównośd nie jest prawdziwa, to mechanizm nie jest mechanizmem
Grashofa i żaden człon nie będzie w stanie wykonad pełnego obrotu.
To jest łaocuch kinematyczny klasy II.
Warunek Grashofa
20/06/2013
21
Jacek Cieślik
Podsumowanie
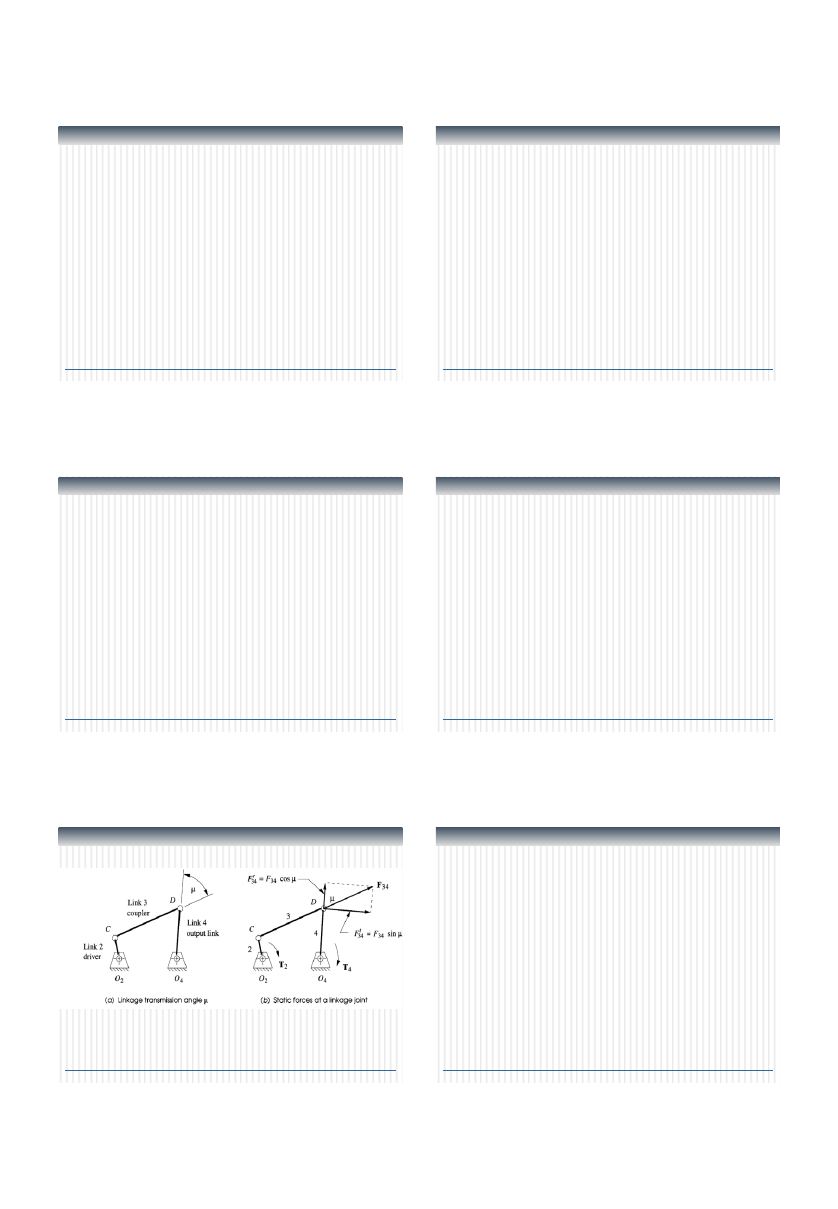
Wszystkie przypadki mechanizmu nie będące mechanizmem Grashofa.
Warunek Grashofa
20/06/2013
22
Jacek Cieślik
Podsumowanie
Problem: Zaprojektowad mechanizm czworoboku przegubowego w układzie
korba-wahacz dający 45 ° obrotu dźwigni wahacza z równym czasem do
przodu i do tyłu, przy stałej prędkości obrotowej silnika.
Rozwiązanie: (patrz rys. 3-3)
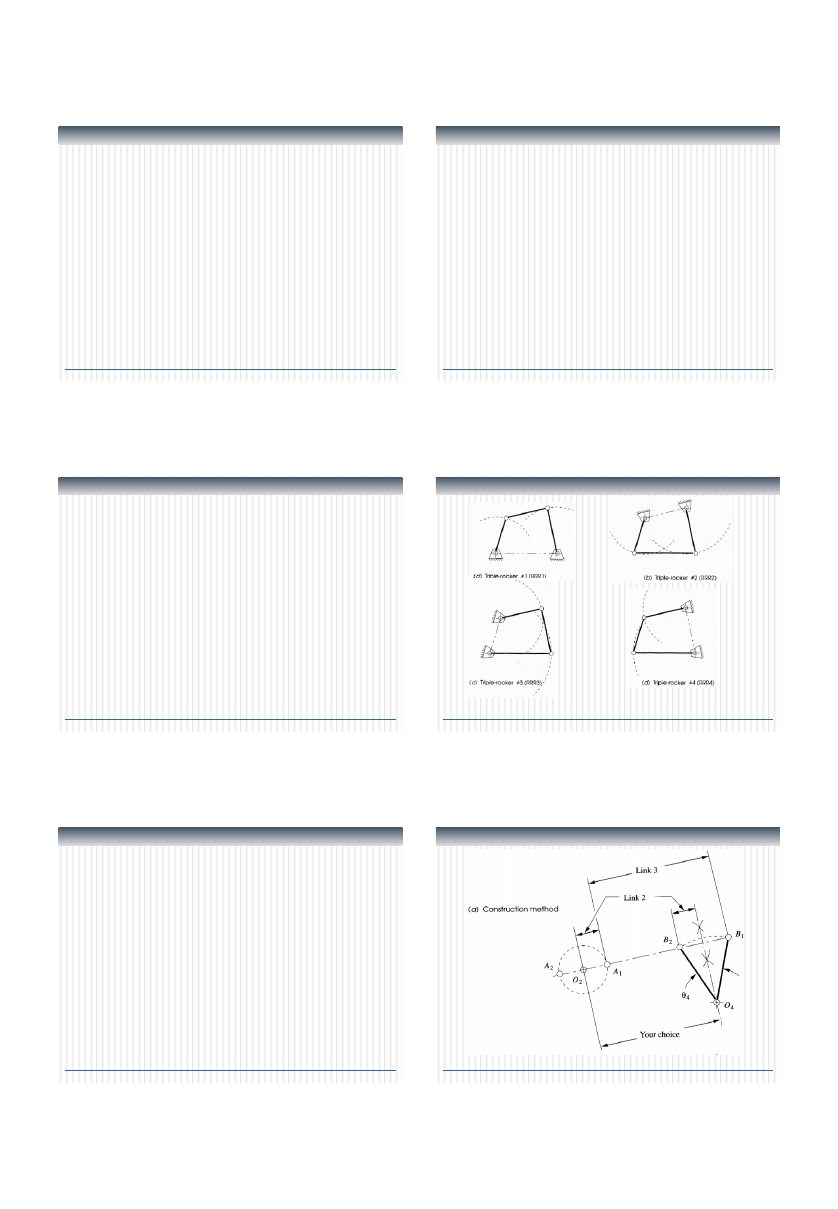
1. Narysuj człon wyjściowy O
4
B w obu skrajnych położeniach, B
1
i B
2
w
dowolnym dogodnym miejscu, np. tak, że uzyskano żądany kąt ruchu θ4.
2. Narysuj łuk B
1
B
2
i przedłuż go w dowolnym kierunku.
3. Wybierz dogodny punkt O
2
na przedłużeniu linii B
1
B
2
.
4. Podziel na połowę odcinek B
1
B
2
narysuj okrąg o tym promieniu o środku
w O
2
.
5. Oznacz dwa przecięcia okręgu i przedłużonego łuku B
1
B
2
odpowiednio A
1
i A
2
.
6. Zmierz długośd łącznika A
1
do B
1
lub A
2
do B
2
.
7. Zmierz długośd członu 1, długośd korby 2 i długośd wahacza 4.
8. Sprawdź warunek Grashofa. Jeśli nie jest spełniony powtórz kroki od 3 do 8
z O
2
umieszczonym dalej od O
4
.
Przykład 1
20/06/2013
23
Jacek Cieślik
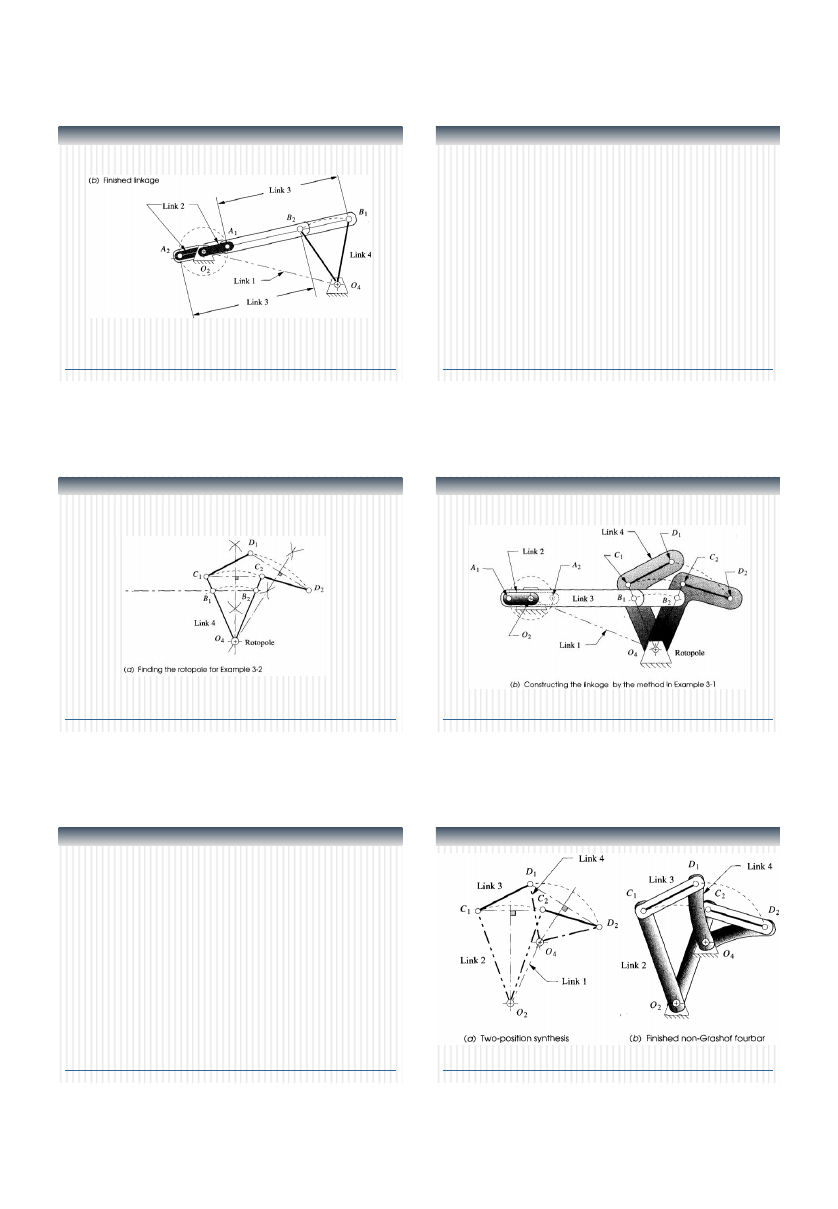
Rys. 3-3a. Synteza mechanizmu na podstawie dwu pozycji z wahaczem na wyjściu
Przykład 1
20/06/2013
24
Jacek Cieślik
5
Przykład 1
20/06/2013
25
Jacek Cieślik
Fig. 3-3b. Synteza mechanizmu na podstawie dwu pozycji z wahaczem na wyjściu
Podsumowanie
Wahacz na wyjściu - dwie pozycje, przy złożonym ruchu. (Generacja ruchu)
Problem: Zaprojektowad mechanizm czworoboku przegubowego przenoszący
człon CD z pozycji C
1
D
1
do C
2
D
2
Rozwiązanie: (patrz rys. 3-4)
1. Narysuj człon CD w dwóch wymaganych pozycjach C
1
D
1
i C
2
D
2
w płaszczyźnie, jak pokazano.
2. Narysuj linie konstrukcyjne z punktu C
1
do C
2
i D
1
z punktu do D
2
.
3. Podziel na połowę odcinki C
1
C
2
i D
1
D
2
i przedłuż ich symetralne tak,
aby przecięły się w punkcie O
4
. Punkt Ich przecięcia jest środkiem obrotu.
4. Wybierz dogodny promieo i narysuj łuk względem środka obrotu do
przecięcia z obu liniami O
4
C
1
i O
4
C
2
. Oznacz przez B
1
i B
2
punkty przecięcia.
5. Wykonaj kroki od 2 do 8 z Przykład 1, aby zakooczyd budowanie
mechanizmu przegubowego.
Przykład 2
20/06/2013
26
Jacek Cieślik
Rys. 3-4a. Synteza mechanizmu na podstawie dwu pozycji z wahaczem na wyjściu
Przykład 2
20/06/2013
27
Jacek Cieślik
Rys. 3-4a. Synteza mechanizmu na podstawie dwu pozycji z wahaczem na wyjściu
Przykład 2
20/06/2013
28
Jacek Cieślik
Podsumowanie
Łącznik na wyjściu - dwie pozycje, przy złożonym ruchu.
Problem: Zaprojektowad mechanizm czworoboku przegubowego przenoszący
człon CD z pozycji C
1
D
1
do C
2
D
2
(z ruchomymi sworzniami w punktach C i D).
Rozwiązanie: (patrz rys. 3-5)
1. Narysuj człon CD w dwóch wymaganych pozycjach C
1
D
1
i C
2
D
2
w płaszczyźnie.
2. Narysuj linie konstruowane z punktu C
1
do C
2
i D
1
z punktu do D
2
.
3. Podziel na połowę odcinki C
1
C
2
i D
1
D
2
i przedłuż ich symetralne tak, aby
przecięły się w punkcie O
4
. Środek obrotu nie będzie używany w tym rozwiązaniu.
4. Wybierz po jednym dowolnym punkcie na każdej dwusiecznej, odpowiednio
jako stałe punkty obrotu O
2
i O
4
,.
5. Połącz O
2
z C
1
i nazwij członem 2. Podłącz O
4
z D
1
i nazwij członem 4.
6. Odcinek C
1
D
1
jest członem 3. Odcinek O
2
O
4
jest członem 1.
7. Sprawdź warunek Grashofa i powtórz kroki od 4 do 7 jeśli nie jest spełniony.
Należy pamiętad, że wszystkie warunki Grashofa są dopuszczalne.
8. Zbuduj model i sprawdź jego działanie, aby upewnid się czy może dostad się od
położenia wyjściowego do koocowego, nie napotykając żadnych ograniczeo
(przełącznik pozycji).
9. Sprawdź kąt transmisji.
Przykład 3
20/06/2013
29
Jacek Cieślik
Fig. 3-5. Synteza mechanizmu na podstawie dwu pozycji z łącznikiem na wyjściu.
Przykład 3
20/06/2013
30
Jacek Cieślik
6
Problem: Zaprojektowad grupę strukturalną do napędu i sterowania ruchem
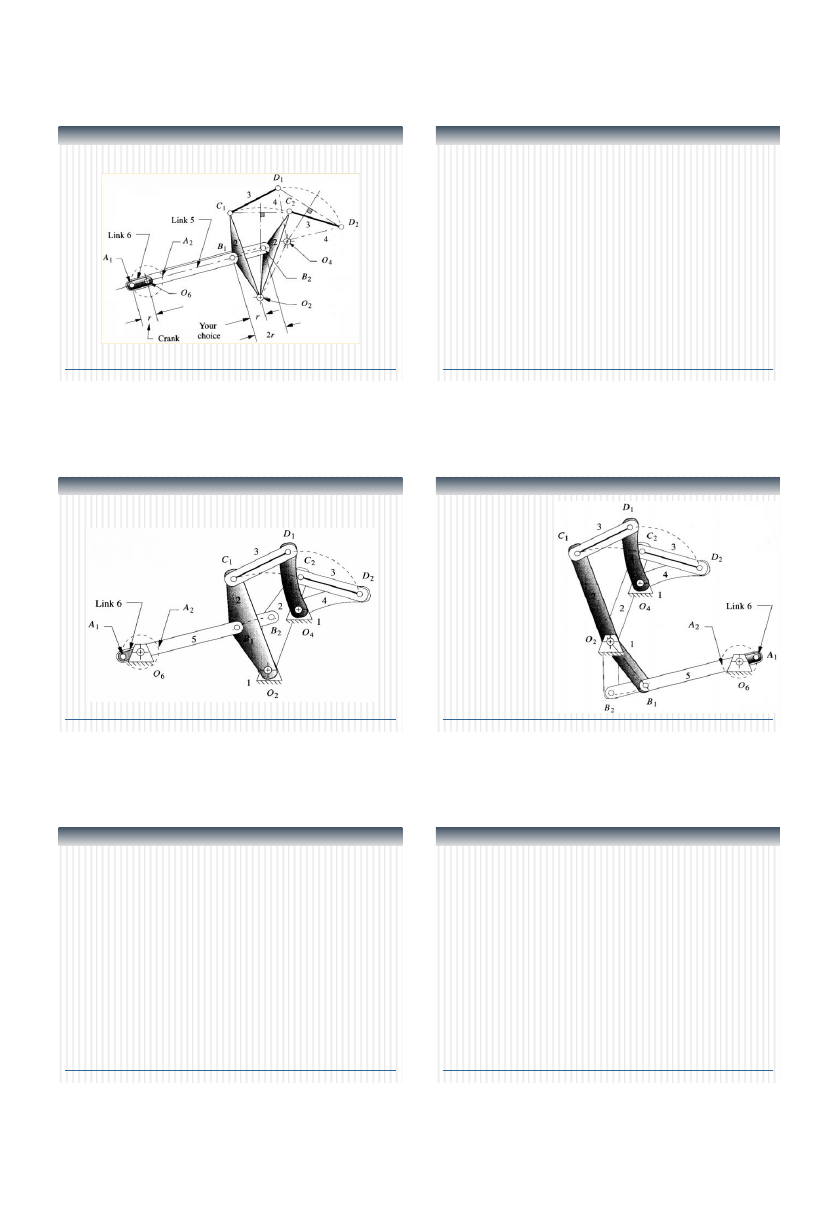
układu z przykładu 3. Rozwiązanie przedstawiono na rys. 3.6a.
Rys. 3-6a. Dodawanie grupy strukturalnej do mechanizmu dźwigniowego.
Przykład 4 – dodanie grupy strukturalnej do sterowania ruchem mechanizmu z przykładu 3.
20/06/2013
31
Jacek Cieślik
1. Wybrad dogodny punkt na członie 2 mechanizmu projektowanego w
przykładzie 3.
2. Nie może to byd punkt leżący na linii O
2
C
1
. Oznacz ten punkt jako B
1
,
3. Narysuj łuk o środku w punkcie O
2
przechodzący przez B
1
tak, aby przecinał
linię O
2
C
2
w drugim położeniu członu 2. Oznacz ten punkt jako B
2
. Łuk B
1
B
2
wyznaczy położenia jak w Przykładzie 1.
4. Wykonaj kroki od 2 do 9 z przykładu 1 w celu ukooczenia mechanizmu, z
wyjątkiem dodanych członów 5 i 6. Znajdź środek O
6
jako środek obrotu
członu 6, który będzie członem napędowym (korba).
Czworobok (podłaocuch) złożony z członów O
6
, A
1
, B
1
, O
2
musi spełniad
warunek Grashofa.
Przykład 4 – dodanie grupy strukturalnej do sterowania ruchem mechanizmu z przykładu 3.
20/06/2013
32
Jacek Cieślik
Rys. 3-6b. Ukooczony 6-cio członowy mechanizm dźwigniowy z napędem w O
6
.
Przykład 4 – dodanie grupy strukturalnej do sterowania ruchem mechanizmu z przykładu 3.
20/06/2013
33
Jacek Cieślik
Rys. 3-6c. Inne położenie
6-cio członowego
mechanizm dźwigniowego
z napędem w O
6
.
Przykład 4 – dodanie grupy strukturalnej do sterowania ruchem mechanizmu z przykładu 3.
20/06/2013
34
Jacek Cieślik
Synteza przez trzy punkty (trójpozycyjna) umożliwia zdefiniowanie trzech pozycji
linii w płaszczyźnie i utworzy konfigurację mechanizmu czworoboku
przegubowego, umożliwiającą przeniesienie go do każdego z tych położeo. Jest to
problem generacji ruchu.
Technika syntezy jest logiczną kontynuacją metody stosowanej w przykładzie 3 dla
dwu-pozycyjnej syntezy z wyjściem w postaci łącznika.
Wynikowy mechanizm może mied dowolny warunek Grashofa i zwykle wymaga
dodania grupy strukturalnej do sterowania i ograniczenia jej ruchu do
wymaganych położeo (pozycji).
Synteza przez trzy punkty z poruszającymi się sworzniami
20/06/2013
35
Jacek Cieślik
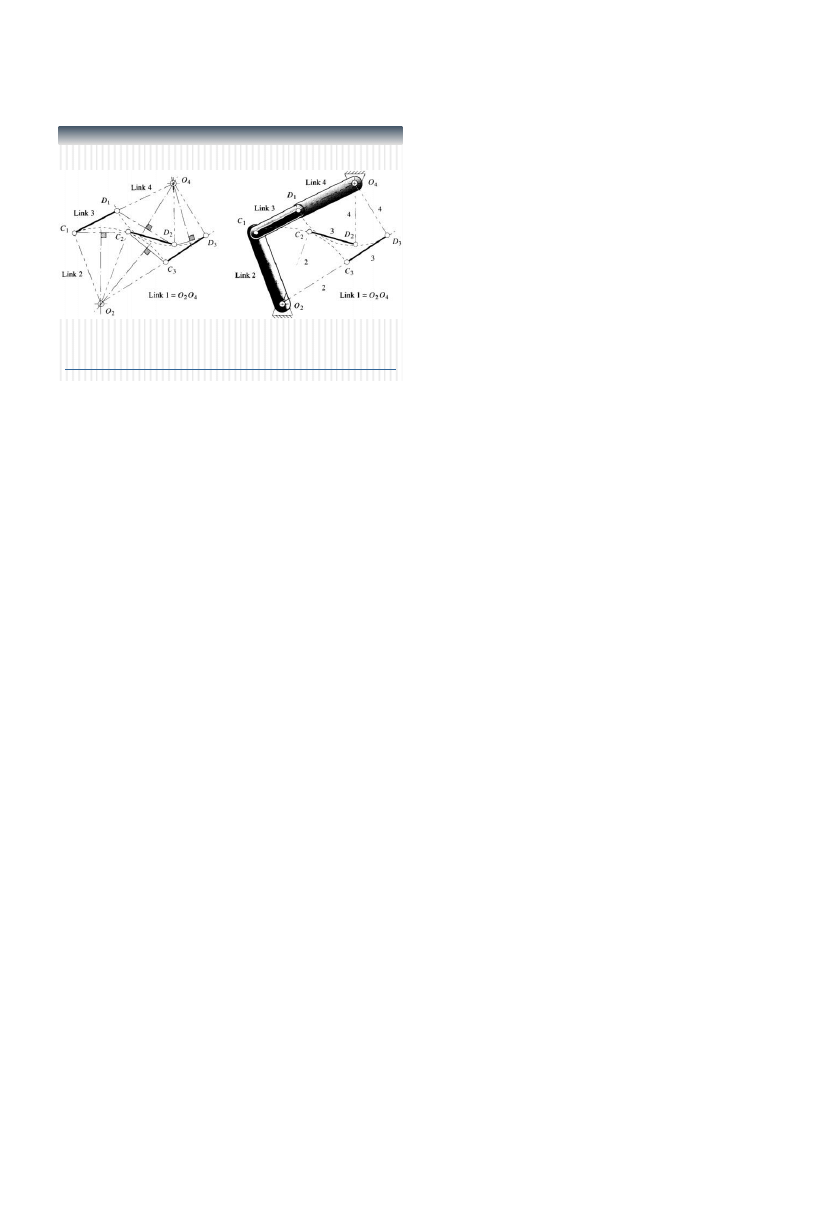
Problem: Zaprojektuj mechanizm czworoboku przegubowego do poruszania
członu CD z położenia C
1
D
1
do C
2
D
2
i dalej do C
3
D
3
. Ruchome sworznie to punkty C
i D. Znajdź położenia stałych sworzni.
Rozwiązanie: (patrz Rys. 3.8)
1. Narysuj człon CD w trzech położeniach projektowych C
1
D
1
, C
2
D
2
, C
3
D
3
na
płaszczyźnie jak pokazano.
2. Narysuj linie konstrukcyjne od punktu C
1
do C
2
i od punktu C
2
do C
3
3. Znajdź środki odcinków C
1
C
2
oraz C
2
C
3
i przedłuż ich prostopadłe aż do punktu
przecięcia. Oznacz punkt przecięcia jako O
2
.
4. Powtórz kroki 2 i 3 dla odcinków D
1
D
2
and D
2
D
3
. Oznacz punkt przecięcia jako
O
4
.
5. Połącz punkt O
2
z punktem C
1
i oznacz jako człon 2. Połącz punkt O
4
z punktem
D
1
i oznacz jako człon 4.
6. Odcinek C
1
D
1
jest członem 3. Odcinek O
2
O
4
jest członem 1.
7. Sprawdź warunek Grashofa. Każdy wynik jest akceptowalny w tym przypadku.
8. Zbuduj napędową grupę strukturalną zgodnie z metodą podaną w przykładzie
4 stosując przedłużenie członu 3 do dołączenia grupy strukturalnej.
Przykład 5 – projekt mechanizmu przez trzy punkty
20/06/2013
36
Jacek Cieślik
7
Rys. 3-7a. Metoda konstrukcji Rys. 3-7b. Ukooczony mechanizm czworoboku.
Nie spełnia warunku Grashofa.
Przykład 5 – projekt mechanizmu przez trzy punkty
20/06/2013
37
Jacek Cieślik
Wyszukiwarka
Podobne podstrony:
KiDUM p w02 CG
RBD W02
w02
RBD W02
c cxx w02
Gazownictwo w02
inf2 w02
AISD W02
2wekten w02
Biochemia - W02 - 09.10.2000, Wykład II
anl1 w02 zima2012 id 65272 Nieznany (2)
anl1 w02 lato2009 id 65271 Nieznany (2)
KZ BD w02
AM23 w02 Szeregi liczbowe cz 1 Nieznany
CG 10 (7)
imw w02 strukturysp analiza przeplywow
IMW W02 analiza stanow id 21233 Nieznany
W02 SCR historia pojecia definicje
Antropologia kulturowa W02
więcej podobnych podstron