Przedmiot i metodologia
fizyki
- KINEMATYKA
Dr hab. inż. Jerzy
ZIELIŃSKI prof. WAT
Zakład Fizyki i Technologii
Kryształów bud 5, pok. 218
Tel. 6837545; 6839731
Email: jzielinski@wat.edu.pl
Wykład 1B
PROGRAM
Wykład – 16 godz. semestr I + 20 semestr II
Ćwiczenia – 14 godz. semestr I + 22
semestr II
Laboratoria -
18 godz. semestr
II
Kurs
Wykład – 10 godzin
Ćwiczenia – 20 godzin
Zasady zaliczania w semestrze I
Przedmiot jest zaliczany na ostatnich
zajęciach
Zaliczanie w formie pracy pisemnej polega
na od-powiedzi na 6 pytań definicyjnych i
jedno opisowe.
Podstawą
przystąpienia
do
zaliczenia
przedmiotu jest wcześniejsze zaliczenie
ćwiczeń rachun-kowych i kursu.
Literatura
1975
1997
1997
1994
2003
1994
2002
1991
2001
Fizyka dla inżynierów cz. I i cz.. II, WNT
Fizyka, WNT
Fizyka cz. I i cz. .II, WNT
Podstawy fizyki dla elektroników Skrypt WAT
Krótki kurs fizyki dla inżynierów, Skrypt
Fizyka ogólna. Przykłady i zadania z fizyki cz. I.
Rozwiązania i odpowiedzi do zadań z fizyki cz. .II.
Skrypt WAT
Wybrane przykłady zadań do wykładu z fizyki dla
inżynierów,
Fizyka ogólna – ćwiczenia laboratoryjne cz. I i II. Skrypt
WAT
Wybrane zagadnienia z fizyki skrypt WAT
J. Massalski
M. Massalska
Cz. Bobrowski
J. Orear,
A. Rogalski
M. Demianiuk
Z. Raszewski i
inni
M Demianiuk
S. Bartnicki i
inni
Z. Raszewski, J.
Zieliński, T.
Kostrzyński
Rok
wydania
Literatura
autor
Istota fizyki
poszukiwanie i poznawanie
podstawowych praw przyrody
ścisły związek fizyki z techniką
fizyka jest nauką ścisłą –
matematyczny opis praw
fizycznych
fizyka opiera się na pomiarach
PODSTAWY
KINEMATYKI
Kinematyka – klasyfikacja i
porównywanie różnych ruchów
(jak zmiany ruchu zależą od
czasu?)
Ruch mechaniczny
Ruch mechaniczny – zmiana położenia ciała konieczne
wskazanie innych ciał względem, których ruch się odbywa
(względne przemieszczanie się ciał)
Ruch – zmiana w przestrzeni i w czasie
Układ odniesienia – zbiór nieruchomych względem siebie ciał
służący do rozpatrywania ruchu innych ciał i zegar odmierzający
czas
Ruch tego samego ciała względem różnych układów
odniesienia różny charakter (pasażer w pociągu)
opis ruchu – podanie położenia dla każdej chwili czasu
Punkt materialny – ciało o znikomo małych rozmiarach w
warunkach danego zagadnienia, o danej masie i położeniu, które
można określić jak położenie punktu geometrycznego
Wektory
operacje na wektorach
ruch w dwóch i trzech
wymiarach
Wektory
i skalary
dla ruchu jednowymiarowego kierunek wyróżniamy
znakiem
do opisu ruchu w przestrzeni trójwymiarowej stosujemy
pojęcie wektora
wektor posiada wartość i kierunek
działania na wektorach podlegają prawom rachunku
wektorowego
wielkości wektorowe: przemieszczenie, prędkość,
przyspieszenie, siła
wielkości skalarne: temperatura, ciśnienie, energia, masa,
czas – nie wykazują żadnego kierunku w przestrzeni
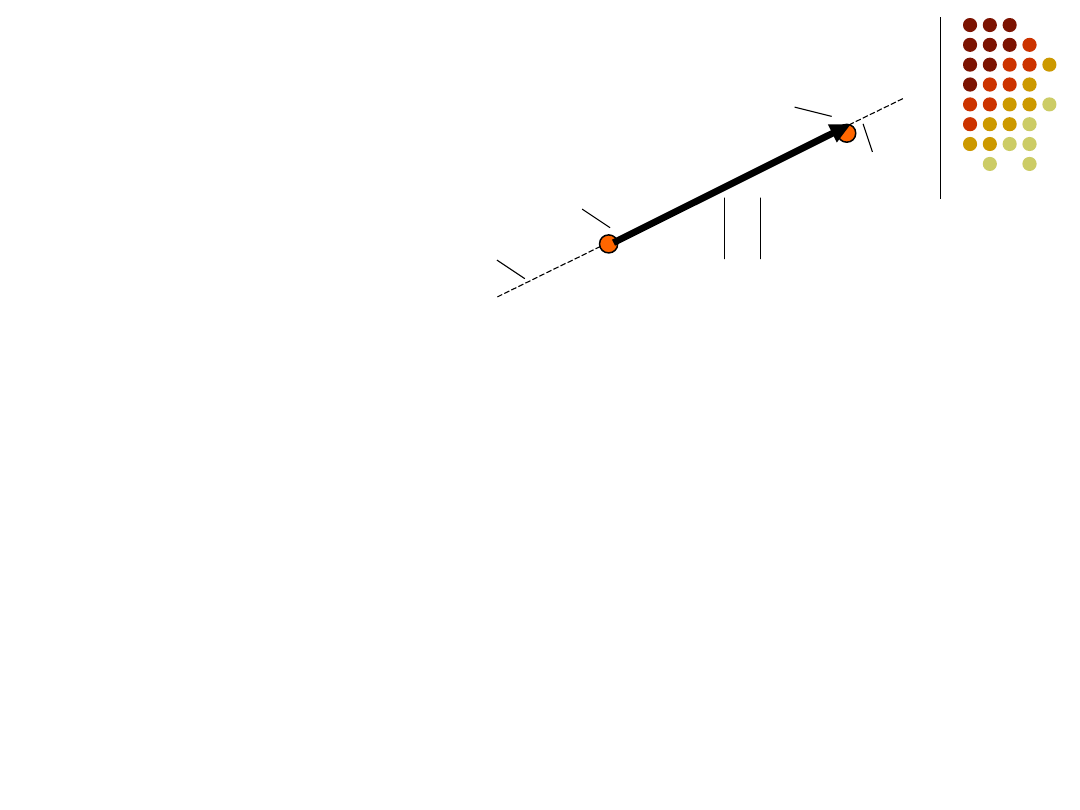
A
B
a
a
a ,
początek
koniec
moduł
zwrot
kierunek
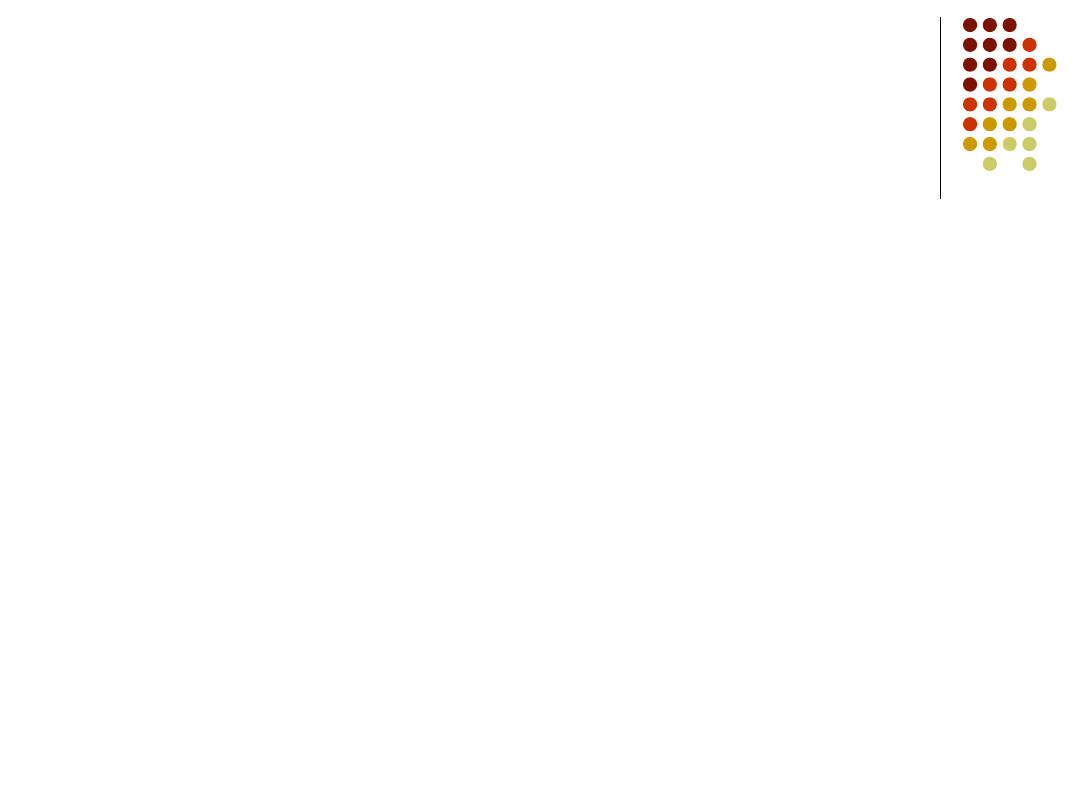
Działanie na wektorach
geometryczne dodawanie wektorów
składowe wektorów
wektory jednostkowe
dodawanie wektorów na składowych
mnożenie wektorów:
iloczyn skalarny
iloczyn wektorowy
Geometryczne dodawanie
wektorów
a
b
s
a
b
Szukamy sumy tych wektorów
Prawa dodawania:
przemienność
łączność
a
b
b
a
c
b
a
c
b
a
b
b
Odejmowanie wektorów to
dodawanie wektora przeciwnego
b
a
b
a
d
a
b
d
A
B
c
łączne
przemieszczenie
jest sumą
wektorową
przemieszczeń
składowych
b
a
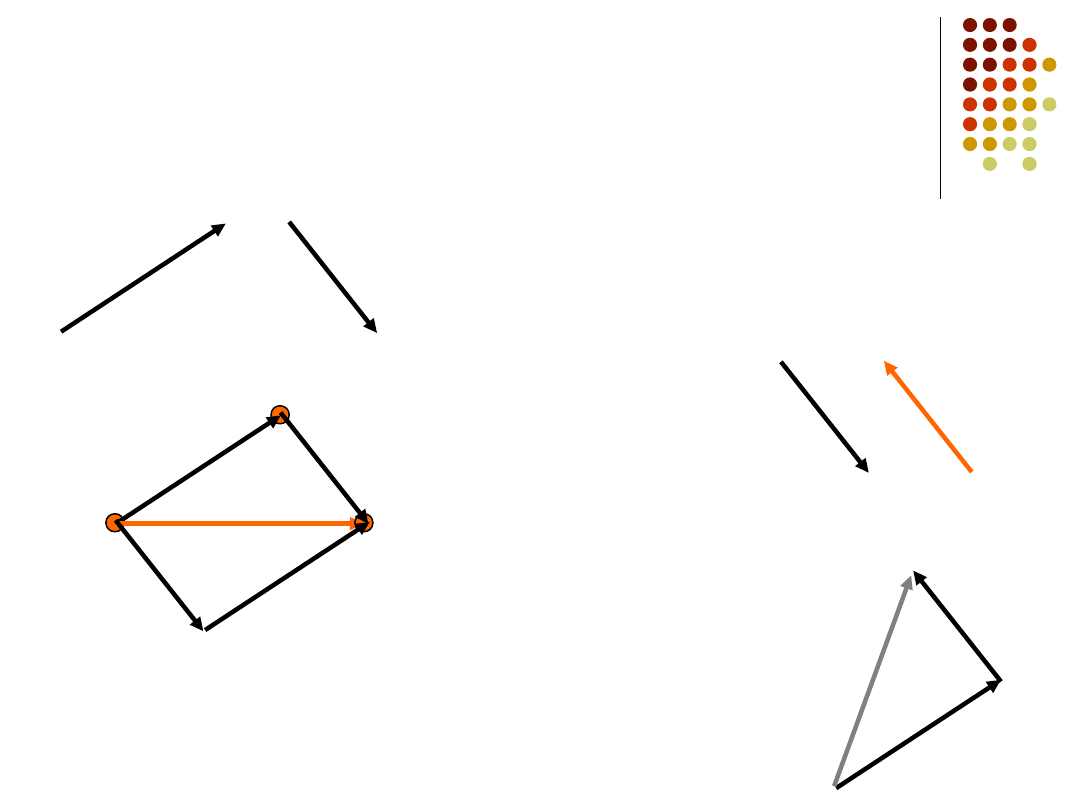
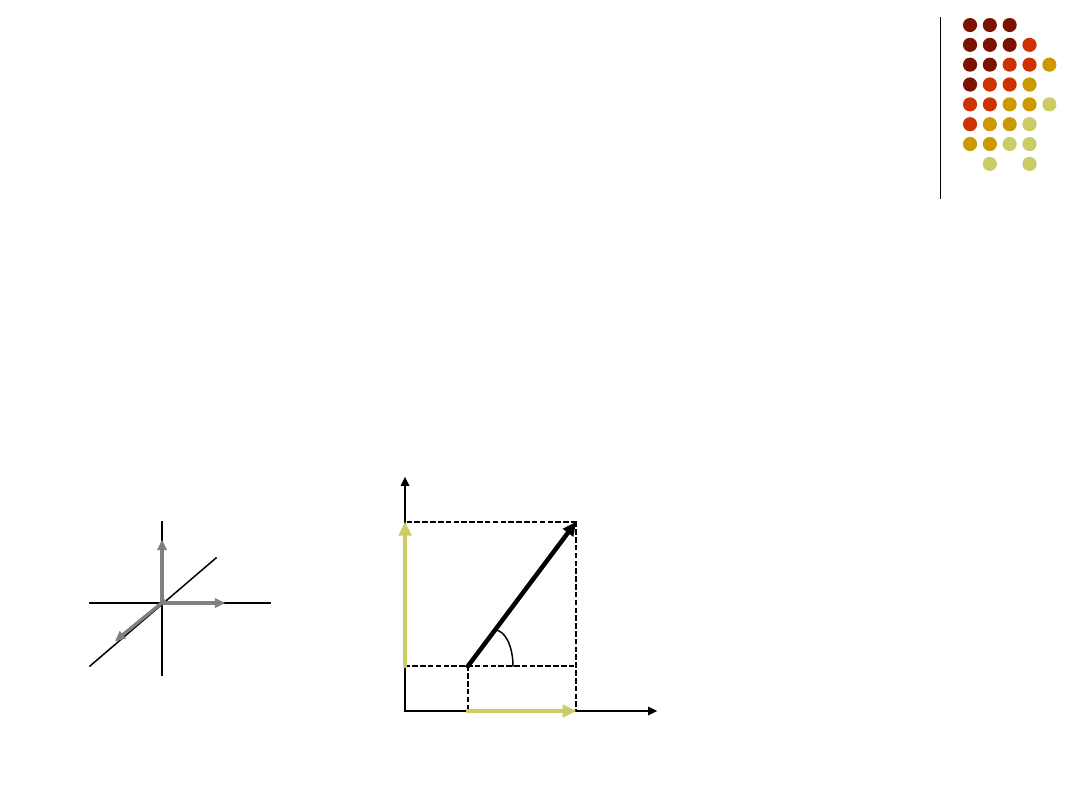
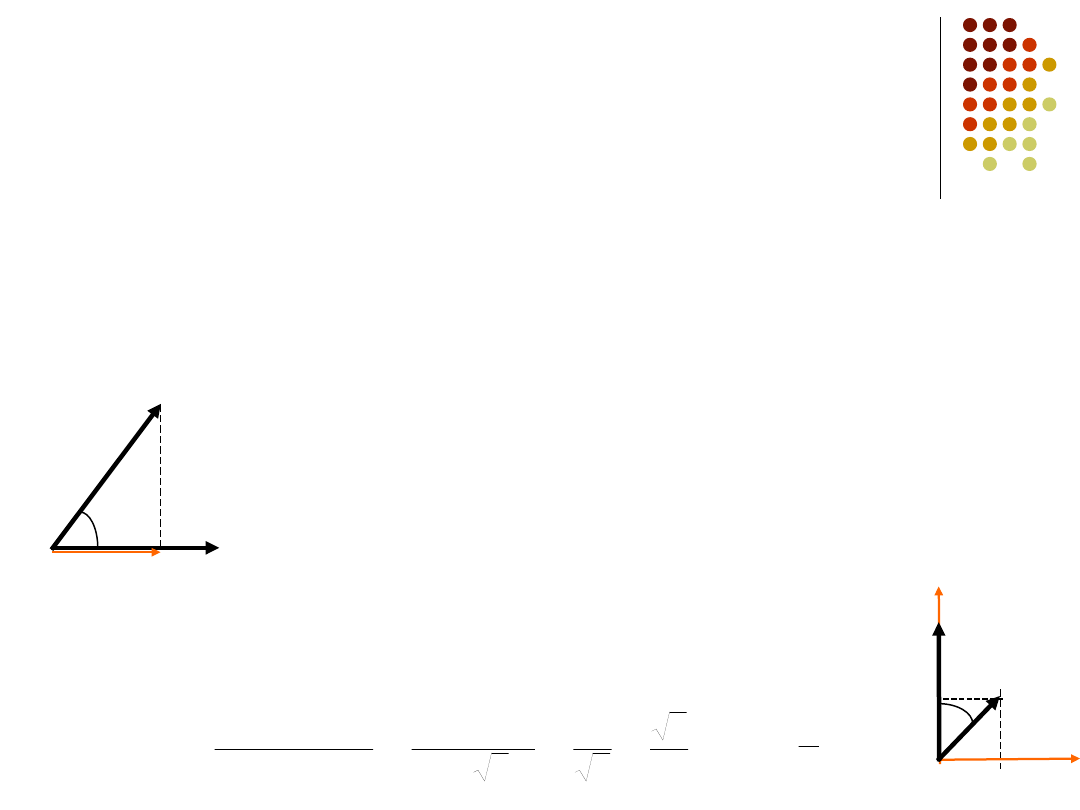
Składowe wektorów
Składową wektora nazywamy jego rzut na
wybraną oś np. x, y prostokątnego układu
współrzędnych
a
x
a
y
a
x
y
cos
a
a
x
sin
a
a
y
Dany wektor jest
jednoznacznie określony przez:
• wielkości a i , lub
• składowe a
x
i a
y
Wielkości te są powiązane
zależnościami:
a
2
2
y
x
a
a
a
x
y
a
a
tg
Wektory jednostkowe
Wektorem jednostkowym nazywamy wektor o długości
równej 1, skierowany w określonym kierunku.
W przypadku prawoskrętnego układu współrzędnych wektory
jednostkowe dodatnich kierunków osi x, y i z oznaczmy
k
j
i
ˆ
,
ˆ
,
ˆ
x
y
z
jˆ
iˆ
kˆ
a
i
a
x
ˆ
j
a
y
ˆ
x
y
y
x
a
a
a
j
a
i
a
a
y
x
ˆ
ˆ
y
x
a
a
a
,

Dodawanie wektorów na
składowych
z
y
x
a
a
a
a
,
,
z
y
x
b
b
b
b
,
,
z
y
x
r
r
r
r
,
,
b
a
r
skoro wektor jest taki sam jak wektor to
i ich składowe muszą być jednakowe
x
x
x
b
a
r
y
y
y
b
a
r
z
z
z
b
a
r
r
b
a
3
1
2 ,
,
a
3
2
1
,
,
b
0
1
3 ,
,
r
Obliczyć kąt pomiędzy
wektorami:
Mnożenie wektorów
iloczyn skalarny
jest wielkością skalarną iloczynowi modułu jednego wektora i
składowej drugiego wektora w kierunku pierwszego z nich
cos
ab
b
a
z
z
y
y
x
x
b
a
b
a
b
a
b
a
Jeśli znamy współrzędne
wektorów to iloczyn skalarny
równy jest sumie iloczynów
odpowiednich składowych
a
b
cos
a
2
0,
a
1
1,
b
2
2
2
1
2
2
1
2
1
0
b
a
b
a
b
a
y
y
x
x
cos
4
a
b
x
y
1
0
2
1
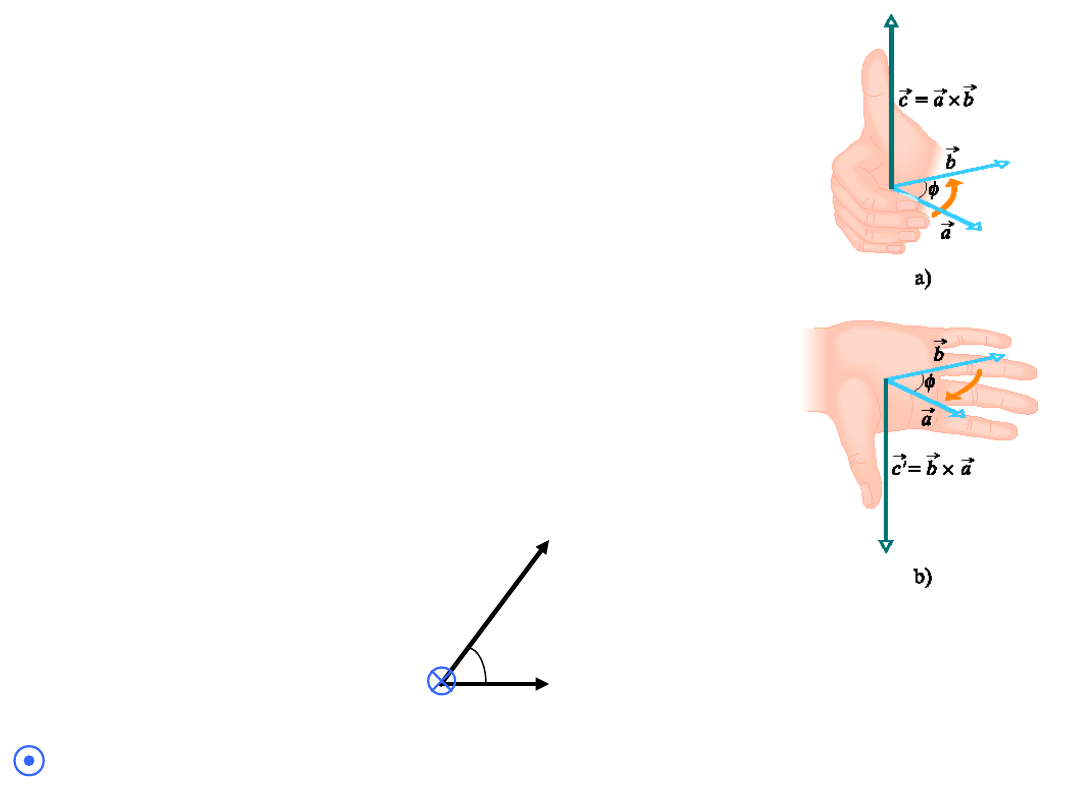
Mnożenie wektorów
iloczyn wektorowy
b
a
c
sin
ab
c
jest to wektor prostopadły do
płaszczyzny w której leżą ,
o zwrocie wyznaczony przez regułę
prawej dłoni i długości równej
c
b
i
a
wektor prostopadły do
ekranu i skierowany w głąb
a
b
c
c
z
a
b
b
a
j
a
b
b
a
i
a
b
b
a
b
a
y
x
y
x
x
z
x
z
z
y
z
y
skierowany
do nas
0
2
1 ,
,
a
0
0
1 ,
,
b
z
j
i
b
a
2
1
0
1
1
0
1
0
0
0
0
2
2
0
0
,
,
b
a
c
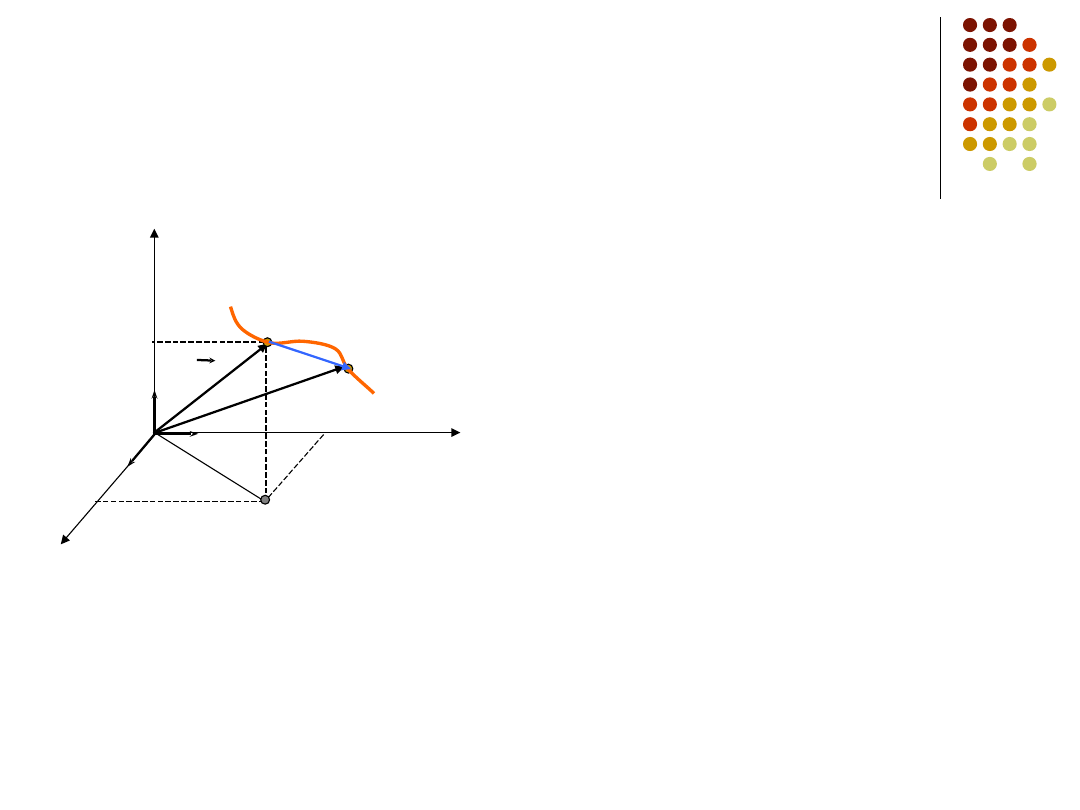
Ruch w trzech wymiarach
układ odniesienia - kartezjański
układ współrzędnych prostokątnych
położenie cząstki – podanie
współrzędnych cząstki (wektor
położenia)
ruch – zmiana położenia względem
układu odniesienia
tor (trajektoria) cząstki – linia którą
zakreśla poruszająca się cząstka
przemieszczenie
k
z
j
y
i
x
z
y
x
r
)
,
,
(
X
Y
Z
A
r
z
A
y
A
x
A
k
j
i
A
B
r
r
r
B
)
,
,
(
)
.
,
,
(
2
4
1
5
2
3
2
B
A
r
r
)
.
,
,
.
,
,
5
0
1
1
5
2
2
3
4
2
1
A
B
r
r
r
0
0
1 ,
,
i
0
1
0 ,
,
j
1
0
0 ,
,
k
wektory jednostkowe
r
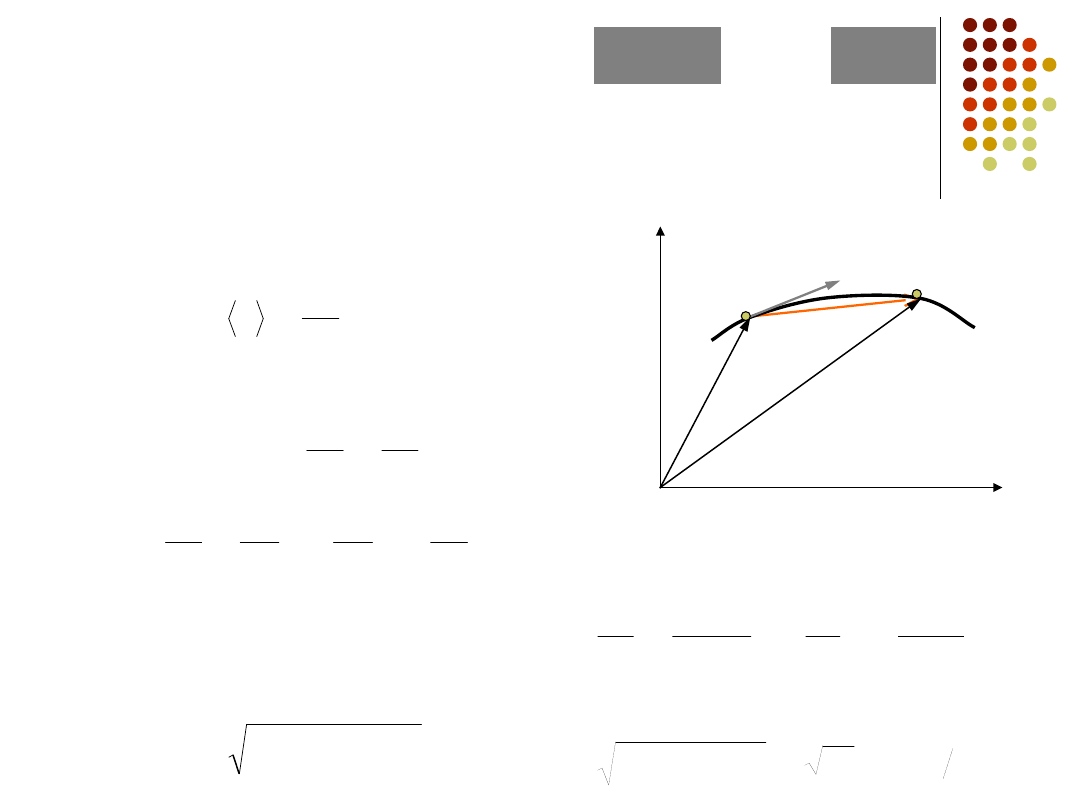
Prędkość
cząstka porusza się po krzywoliniowym torze z
punktu A do B w czasie t przebywając drogę
s
prędkość średnia
prędkość chwilowa
t
r
v
dt
r
d
t
r
v
t
lim
0
k
dt
dz
j
dt
dy
i
dt
dx
dt
r
d
v
k
v
j
v
i
v
v
z
y
x
2
2
2
z
y
x
v
v
v
v
y
x
A
B
t
r
r
r
t
t
r
r
s
v
tor
ProjKinematics.s wf
RacingBalls.s wf
z
y
x
v
v
v
v
,
,
m
t
t
r
3
3
2
2
,
,
k
dt
t
d
j
dt
d
i
dt
t
d
dt
r
d
v
3
3
2
2
Przykład:
3
0
4
,
,
t
v
s
t
Dla
1
3
0
4
1
,
,
s
v
s
m
v
5
25
3
0
4
2
2
2
wartość
prędkości
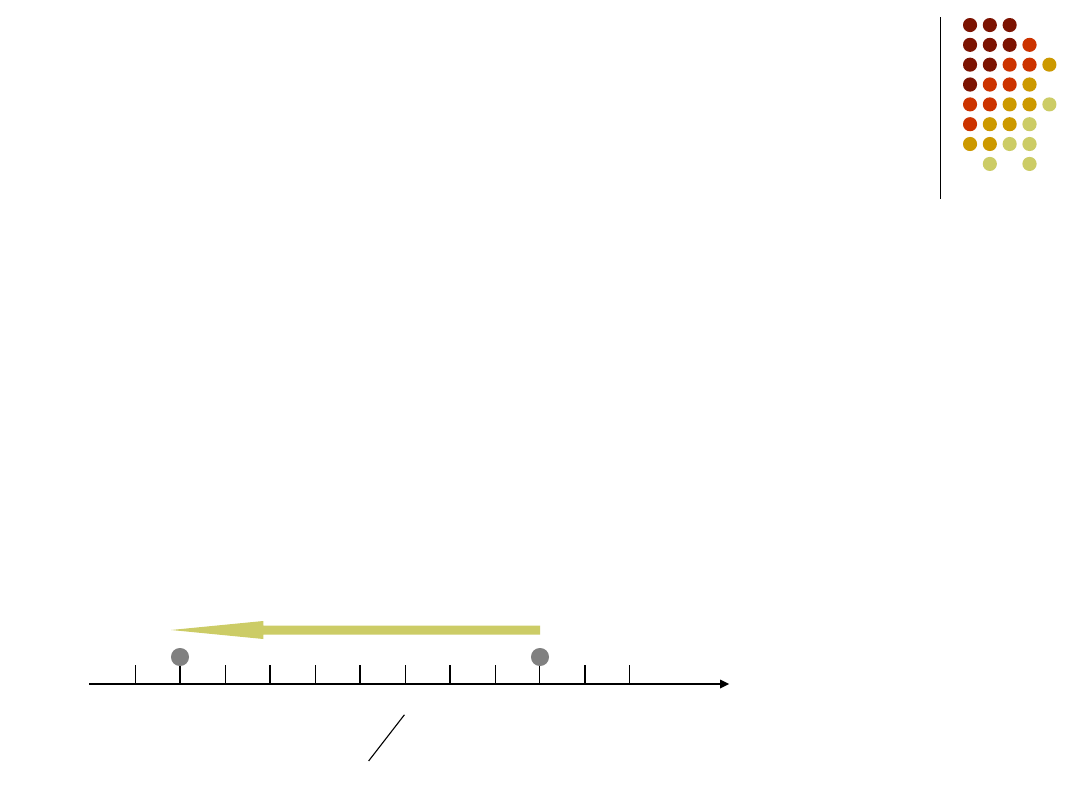
Ruch prostoliniowy
ruch zachodzący tylko wzdłuż linii prostej
położenie ciała, czyli współrzędną punktu w jakim się ono
znajduje, wyznaczamy względem punktu odniesienia
(początku osi) podając współrzędną punktu
przemieszczenie, zmiana położenia punktu materialnego
znak przemieszczenia określa kierunek ruchu
1
2
x
x
x
m
x
m
x
5
2
2
1
,
0 1 2 3 4 5
x [m]
-1
-2
-3
-4
-5
-6
początek osi
m
x
8
3
5
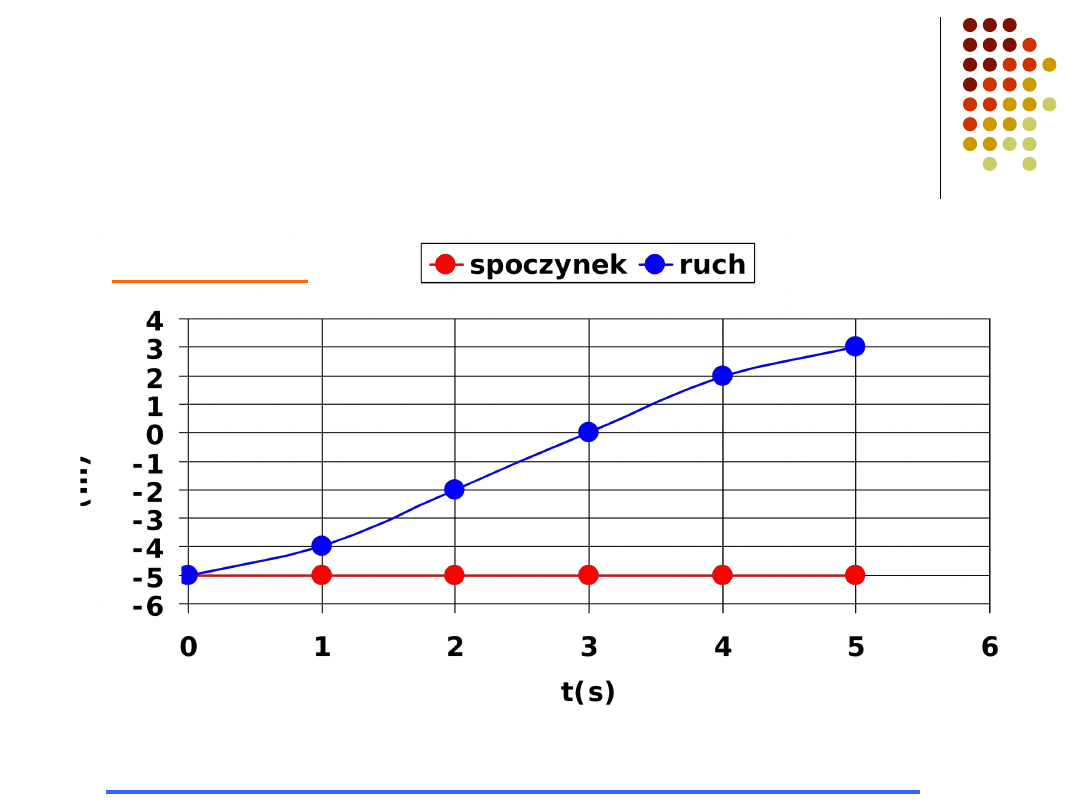
Sposób przedstawiania
ruchu – wykres x(t)
t
f
x
5
x
5
5
0
7
0
1
0
2
3
t
t
t
x
,
,
,
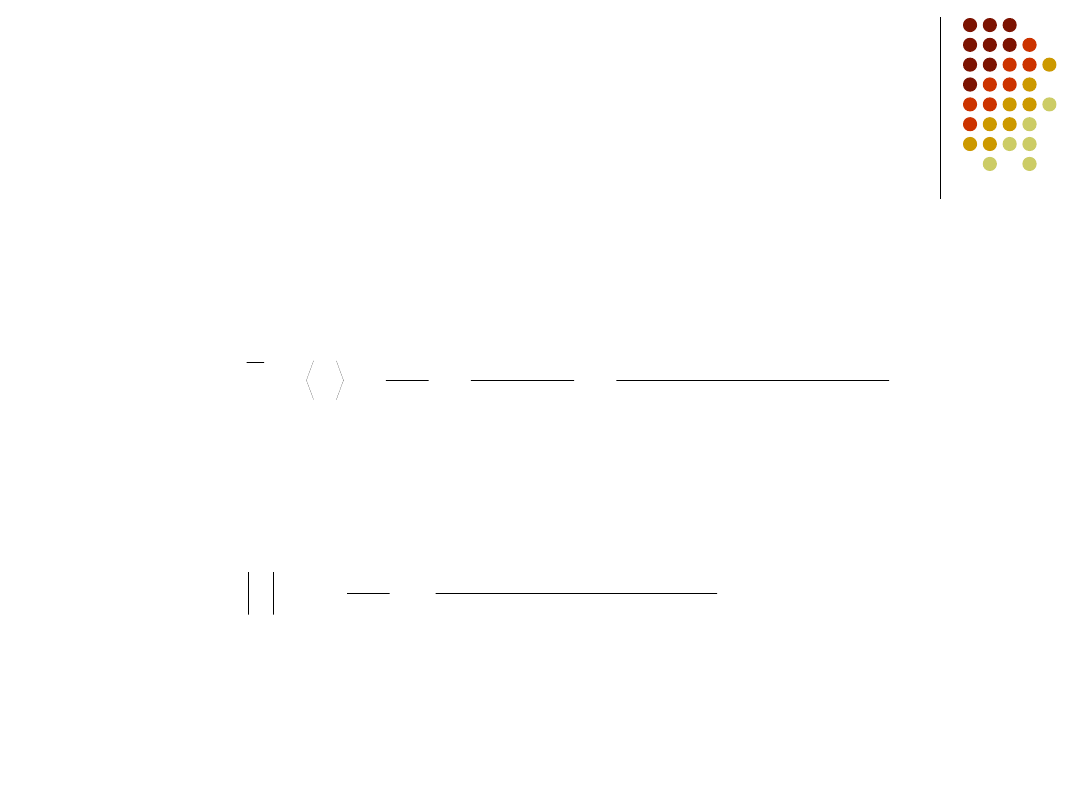
Prędkość średnia
jak szybko porusza się cząstka?
prędkość średnia
jednostka (m/s)
średnia wartość bezwzględnej prędkości
t
zenie
przemieszc
t
t
x
x
t
x
v
v
v
śr
1
2
1
2
t
droga
calkowita
t
s
v
śr
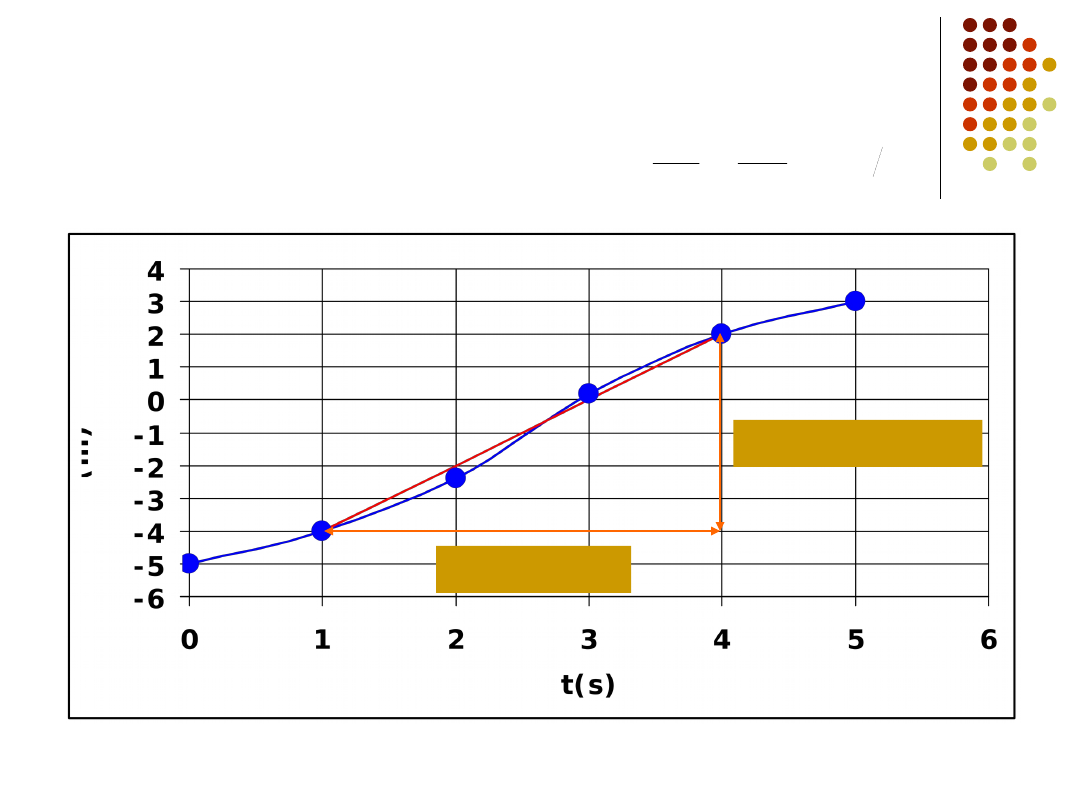
Wyznaczanie prędkości
średniej
x=2-(-4)=6 m
t=4-1=3 s
s
m
s
m
t
x
v
śr
2
3
6
prędkość średnia jako nachylenie prostej (współczynnik kierunkowy)

Prędkość chwilowa
czyli po prostu
„prędkość”
jak szybko porusza się cząstka w danej chwili
v – jest szybkością zmiany położenia cząstki
przy zmianie czasu w danej chwili (v jest
pochodną x względem t)
wartość v jest równa nachyleniu prostej
stycznej do wykresu x=f(t)
dt
dx
t
x
v
t
lim
0
Przy zmniejszaniu się t średnia prędkość dąży do granicy,
którą jest prędkość w danej chwili
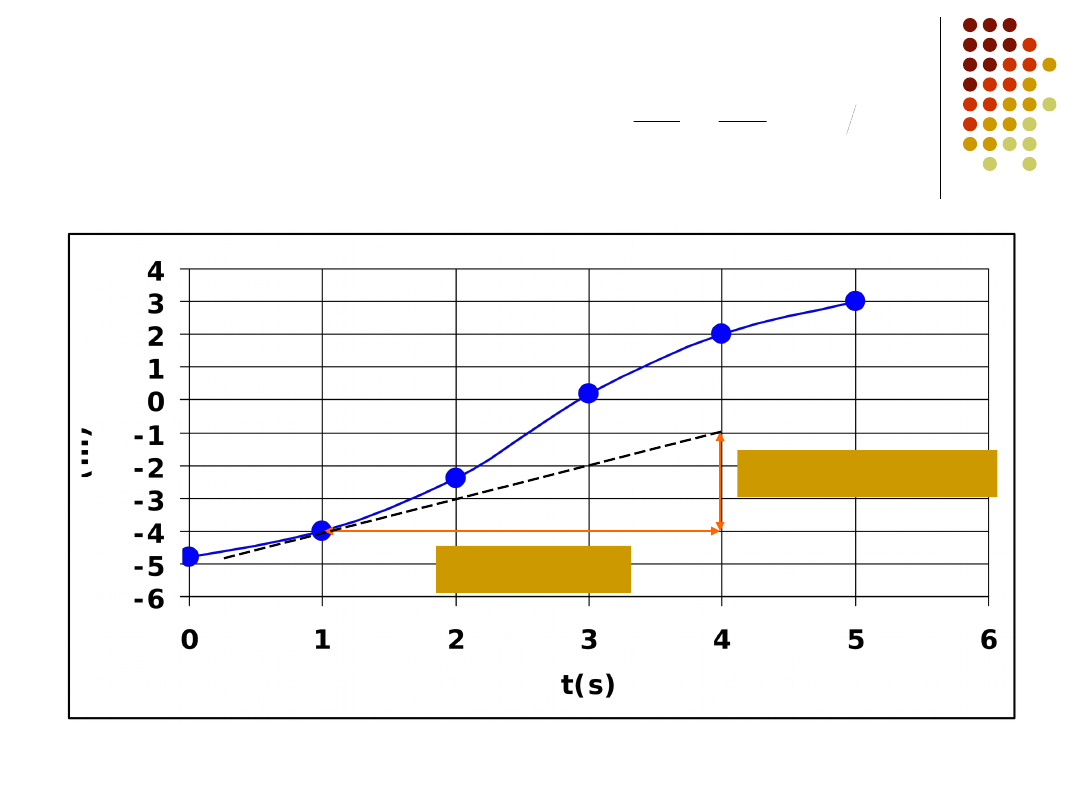
prędkości
chwilowa
s
m
s
m
t
x
s
v
1
3
3
1
prędkość chwilowa jako nachylenie stycznej do wykresu x(t)
x=-1-(-4)=3 m
t=4-1=3 s
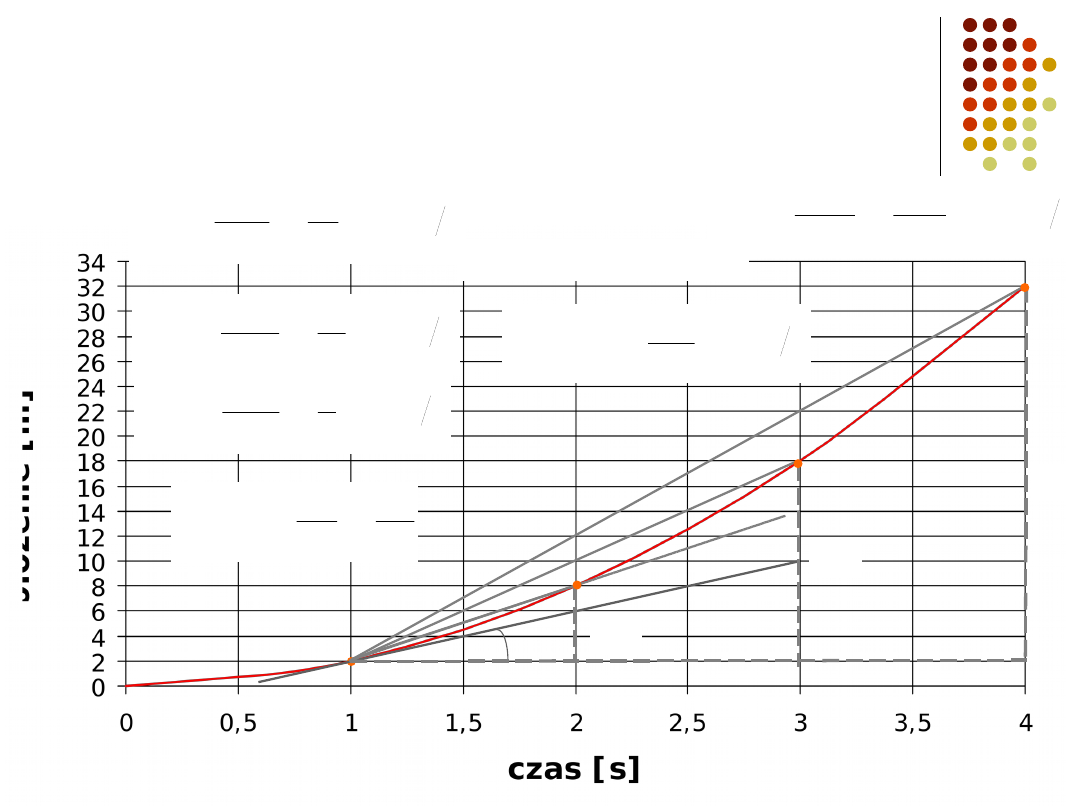
Pochodna - graficznie
funkcja x=2t
2
pochodna x’=4t [v(t=1)=4]
s
m
t
x
tg
v
4
s
m
t
x
v
śr
10
3
30
1
1
1
1
x
s
m
t
x
v
śr
8
2
16
2
2
2
2
x
s
m
t
x
v
śr
6
1
6
3
3
3
3
x
dt
dx
t
x
v
t
lim
0
s
t
1
0,
s
m
t
x
v
n
n
śrn
1
4
1
0
41
0
,
,
,
41
0
2
1
1
2
2
,
,
x
Pochodna funkcji
Funkcja
f(x)
Pochodna
f’(x)
stała
0
x
n
nx
n-1
sin(x)
cos(x)
cos(x)
- sin(x)
e
ax
ae
ax
ln(x)
1/x
x
dt
t
df
dt
dx
ozn
.
y
dx
x
df
dx
dy
ozn
.
Właściwości pochodnej:
(ax)’=ax’
(x+y)’=x’+y’
(x·y)’=x’·y+x·y’
(x/y)’= (x’·y-x·y’)/y
2
dt
dx
dx
dy
dt
t
x
dy
Przykład
Położenie cząstki, poruszającej się wzdłuż osi x, jest
opisane równaniem (x-w metrach, t- w sekundach):
3
1
2
2
9
8
7
t
t
x
,
,
,
Ile wynosi prędkość cząstki w chwili t = 3,5 s?
Czy ciało porusza się wówczas ze stałą prędkością, czy
zmienną?
3
1
2
2
9
8
7
t
t
dt
d
dt
dx
v
,
,
,
2
1
2
3
2
9
0
t
v
,
,
s
m
v
68
5
3
3
6
2
9
5
3
2
,
,
,
,
Cząstka porusza się w ujemnym kierunku osi x z prędko-
ścią o wartości bezwzględnej 68 m/s.
W równaniu v zależy od czasu, a więc prędkość nie
jest stała.
Rachunek całkowy
Całkowanie jest działaniem odwrotnym względem
różniczkowania. Polega na znalezieniu dla badanej funkcji
f(x) tzw. funkcji pierwotnej F(x) która w każdym punkcie
badanego przedziału spełnia równość F’(x) = f(x)
Funkcja pierwotna jest wyznaczana z dokładnością do
dowolnej stałej C, gdyż (F(x)+C)’=f(x)
Sumę F(x)+C nazywamy całką nieoznaczoną f(x) i
oznaczamy symbolem
dx
x
f
)
(
dx
......
symbol całkowania
funkcja zmienna
podcałkowa całkowania
Całka oznaczona
Jeżeli F(x) jest funkcją pierwotną funkcji f(x) to całką
oznaczoną funkcji f(x) w przedziale [a,b] nazywamy
)
(
)
(
)
(
)
(
a
F
b
F
x
F
dx
x
f
b
a
b
a
górna
dolna
granica
całkowania
Przykład:
5
7
1
4
2
1
2
1
2
2
4
1
2
4
1
,
x
dx
x
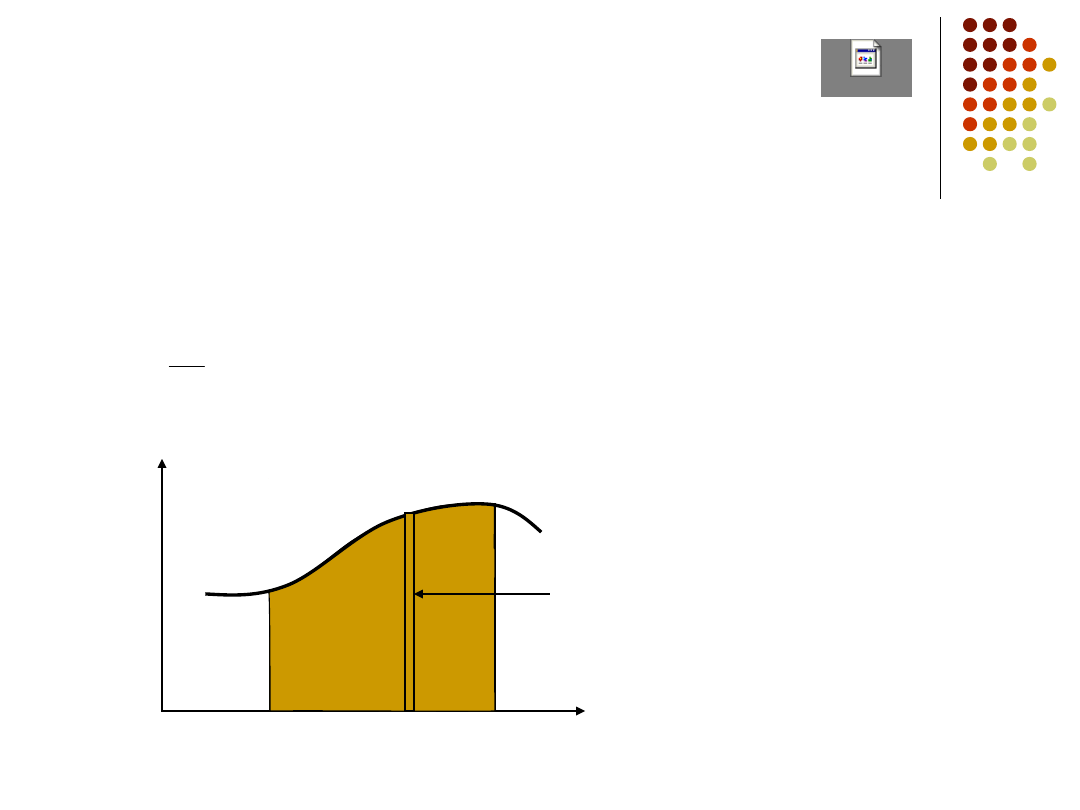
Całka jako suma
znajomość prędkości pozwala obliczyć drogę
przebytą przez punkt materialny
dt
ds
v
dt
v
ds
2
1
t
t
dt
v
s
v
t
t
1
t
2
s
v(t)
całka oznaczona
t
i
s
i
i
i
i
i
i
t
v
s
s
v
i
całka oznaczona
równa jest polu pod
krzywą
Integrals.s wf
Podstawowe wzory
C
x
dx
x
cos
sin
C
x
dx
1
C
ax
dx
a
C
n
x
dx
x
n
n
1
1
C
x
dx
x
ln
1
...
,
,
718
2
e
C
e
dx
e
x
x
C
dx
0
C
x
dx
x
sin
cos
Przykłady:
2
3
3
2
3
1
3
1
x
C
x
bo
C
x
dx
x
l
,
C
y
C
y
dy
y
dy
y
1
1
1
1
2
2
C
t
dt
t
5
5
1
5
cos
sin
Równanie różniczkowe typu ma rozwiązanie
ogólne postaci
Równania różniczkowe
x
f
dx
dy
dx
x
f
y
dx
x
f
dy
dx
x
f
dy
dx
x
f
y
Przykład:
t
e
y
2
'
t
e
dt
dy
2
dt
e
y
t
2
C
e
y
t
2
2
1
Document Outline
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Slide 22
- Slide 23
- Slide 24
- Slide 25
- Slide 26
- Slide 27
- Slide 28
- Slide 29
- Slide 30
- Slide 31
- Slide 32
Wyszukiwarka
Podobne podstrony:
02 Wykł 02 PODSTAWY KINEMATYKI
Wykl 1B Nowy
Wykł 01 wstępny
Dlaczego chemia wykł wstepny 1
Wykład 1B Definicje i pojęcia podstawowe, IŚ Tokarzewski 27.06.2016, VI semestr COWiG, Źródła
wykl 8 Mechanizmy
Obróbka wstępna ryb
Stomatologia czesc wykl 12
1 L9 KWykł 01a wstępnyid 9412 ppt
Wykł 1 Omówienie standardów
Wykl 1
KOMPLEKSY POLAKOW wykl 29 03 2012
więcej podobnych podstron