Politechnika Lubelska
Katedra Automatyki i Napędu Elektrycznego
Laboratorium Napędu Elektrycznego
Temat:Regulacja prędkości kątowej indukcyjnego silnika pierścieniowego w podsynchronicznych kaskadach przekształtnikowych.
Grupa dziekańska : ED 6.1
Grupa laboratoryjna : Bara Maciej
Grochowski Grzegorz
Siwiec Robert
Wolanin Mariusz
Data wykonania : 1997.02.20
1. Cel ćwiczenia.
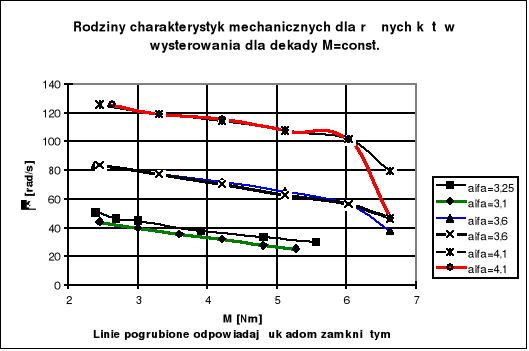
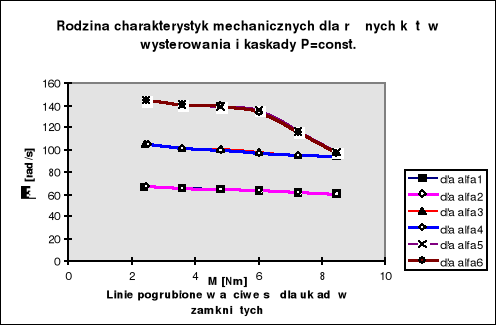
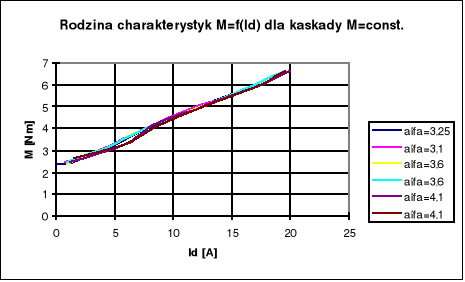
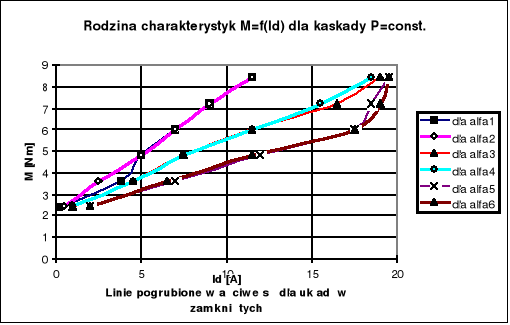
Celem ćwiczenia jest wyznaczenie charakterystyk silnika indukcyjnego pierścieniowego w układach kaskadowych, dla kaskady M=const. oraz P=const.
2. Wykonanie ćwiczenia.
Pomiary wykonano dla różnych kątów wysterowania oraz dla układów zamkniętych i otwartych, oraz dla różnych kaskad. Tabela pomiarowa przedstawiona jest poniżej wraz z obliczeniami pomocniczymi do wyznaczenia charakterystyk mechanicznych ω=f(M):
kaskada M=const |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Pomiary |
|
|
|
|
|
|
|
Obliczenia |
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
rodzaj układu |
a |
I1 |
U1 |
P1 |
Uw |
Id |
Ith |
w |
DP0 |
EH |
PW |
M |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
[V] |
[A] |
[V] |
[kW] |
[V] |
[A] |
[A] |
[rad/s] |
[W] |
[V] |
[W] |
[Nm] |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
otwarty |
3,25 |
5,4 |
403 |
0,24 |
44 |
0 |
0 |
46,08 |
110,0 |
13,97 |
110,0 |
2,39 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
3,25 |
5,5 |
403 |
0,24 |
48 |
1 |
0 |
50,26 |
120,0 |
15,24 |
120,0 |
2,39 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
3,25 |
5,9 |
403 |
0,36 |
44 |
2,5 |
1 |
46,08 |
110,0 |
13,97 |
124,0 |
2,69 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
3,25 |
6,3 |
403 |
0,45 |
43 |
4 |
2 |
45,03 |
107,5 |
13,65 |
134,8 |
2,99 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
3,25 |
7,4 |
403 |
0,66 |
36 |
7,5 |
5 |
37,70 |
90,0 |
11,43 |
147,2 |
3,90 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
3,25 |
8,5 |
403 |
0,84 |
32 |
11,5 |
8 |
33,51 |
80,0 |
10,16 |
161,3 |
4,81 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
3,25 |
9,4 |
403 |
0,102 |
28 |
15 |
10,5 |
29,32 |
70,0 |
8,89 |
163,3 |
5,57 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
zamknięty |
3,07 |
5,5 |
403 |
0,24 |
42 |
0,8 |
0,2 |
43,98 |
105,0 |
13,34 |
107,7 |
2,45 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
3,09 |
6,2 |
403 |
0,36 |
38 |
3,5 |
2 |
39,79 |
95,0 |
12,07 |
119,1 |
2,99 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
3,1 |
6,9 |
403 |
0,42 |
34 |
6 |
4 |
35,60 |
85,0 |
10,80 |
128,2 |
3,60 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
3,1 |
7,6 |
403 |
0,64 |
30 |
8,5 |
6 |
31,42 |
75,0 |
9,53 |
132,2 |
4,21 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
3,1 |
8,3 |
403 |
0,75 |
26 |
11 |
8 |
27,23 |
65,0 |
8,26 |
131,0 |
4,81 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
3,1 |
8,9 |
403 |
0,84 |
24 |
13,5 |
9,5 |
25,13 |
60,0 |
7,62 |
132,4 |
5,27 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
otwarty |
3,6 |
5,6 |
403 |
0,33 |
80 |
1 |
0 |
83,77 |
200,0 |
25,40 |
200,0 |
2,39 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
3,6 |
6,6 |
403 |
0,6 |
74 |
5 |
3 |
77,49 |
185,0 |
23,50 |
255,5 |
3,30 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
3,6 |
7,9 |
403 |
0,96 |
68 |
8,5 |
6 |
71,21 |
170,0 |
21,59 |
299,5 |
4,21 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
3,6 |
9,2 |
403 |
1,35 |
62 |
13 |
9 |
64,92 |
155,0 |
19,69 |
332,2 |
5,12 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
3,6 |
10,5 |
403 |
1,65 |
54 |
17,5 |
12 |
56,55 |
135,0 |
17,15 |
340,7 |
6,03 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
3,6 |
11,3 |
403 |
1,65 |
36 |
20 |
14 |
37,70 |
90,0 |
11,43 |
250,0 |
6,63 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
zamknięty |
3,6 |
5,6 |
403 |
0,3 |
80 |
1 |
0,2 |
83,77 |
200,0 |
25,40 |
205,1 |
2,45 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
3,6 |
6,6 |
403 |
0,66 |
74 |
5 |
3 |
77,49 |
185,0 |
23,50 |
255,5 |
3,30 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
3,6 |
7,7 |
403 |
0,96 |
67 |
8,5 |
6 |
70,16 |
167,5 |
21,27 |
295,1 |
4,21 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
3,6 |
9,1 |
403 |
1,26 |
60 |
13 |
9 |
62,83 |
150,0 |
19,05 |
321,5 |
5,12 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
3,6 |
10,4 |
403 |
1,65 |
54 |
17 |
12 |
56,55 |
135,0 |
17,15 |
340,7 |
6,03 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
3,6 |
10,2 |
403 |
1,68 |
44 |
19,5 |
14 |
46,08 |
110,0 |
13,97 |
305,6 |
6,63 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
otwarty |
4,1 |
5,6 |
403 |
0,42 |
120 |
1,2 |
0,2 |
125,66 |
300,0 |
38,10 |
307,6 |
2,45 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
4,1 |
6,9 |
403 |
0,93 |
114 |
6 |
3 |
119,38 |
285,0 |
36,20 |
393,6 |
3,30 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
4,1 |
8 |
403 |
1,35 |
109 |
8,5 |
6 |
114,14 |
272,5 |
34,61 |
480,1 |
4,21 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
4,1 |
9,4 |
403 |
1,89 |
103 |
13 |
9 |
107,86 |
257,5 |
32,70 |
551,8 |
5,12 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
4,1 |
10,8 |
403 |
2,34 |
97 |
17,5 |
12 |
101,58 |
242,5 |
30,80 |
612,1 |
6,03 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
4,1 |
11,8 |
403 |
2,35 |
76 |
20 |
14 |
79,58 |
190,0 |
24,13 |
527,8 |
6,63 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
zamknięty |
4,1 |
5,7 |
403 |
0,39 |
120 |
1,5 |
0,8 |
125,66 |
300,0 |
38,10 |
330,5 |
2,63 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
4,1 |
6,9 |
403 |
0,93 |
114 |
6 |
3 |
119,38 |
285,0 |
36,20 |
393,6 |
3,30 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
4,1 |
8,1 |
403 |
1,35 |
110 |
9 |
6 |
115,19 |
275,0 |
34,93 |
484,6 |
4,21 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
4,1 |
9,4 |
403 |
1,86 |
103 |
13,2 |
9 |
107,86 |
257,5 |
32,70 |
551,8 |
5,12 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
4,1 |
10,8 |
403 |
2,4 |
97 |
17,5 |
12 |
101,58 |
242,5 |
30,80 |
612,1 |
6,03 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
4,1 |
11,5 |
403 |
2,46 |
44 |
19,5 |
14 |
46,08 |
110,0 |
13,97 |
305,6 |
6,63 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Kaskada P=const |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Pomiary |
|
|
|
|
|
|
|
Obliczenia |
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
rodzaj układu |
I1 |
U1 |
P1 |
Uw |
Id |
Ith |
Im |
w |
DP0 |
EH |
PW |
M |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
[A] |
[V] |
[kW] |
[V] |
[A] |
[A] |
[A] |
[rad/s] |
[W] |
[V] |
[W] |
[Nm] |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
otwarty |
4 |
403 |
0,24 |
63 |
0,2 |
0 |
0,68 |
65,97 |
157,5 |
20,00 |
157,5 |
2,39 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
5,1 |
403 |
0,6 |
62 |
3,8 |
4 |
0,67 |
64,92 |
155,0 |
19,69 |
233,7 |
3,60 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
5,2 |
403 |
0,93 |
61 |
5 |
8 |
0,67 |
63,88 |
152,5 |
19,37 |
307,4 |
4,81 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
5,4 |
403 |
1,26 |
60 |
7 |
12 |
0,67 |
62,83 |
150,0 |
19,05 |
378,6 |
6,03 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
5,7 |
403 |
1,62 |
59 |
9 |
16 |
0,67 |
61,78 |
147,5 |
18,73 |
447,2 |
7,24 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
5,9 |
403 |
1,89 |
58 |
11,5 |
20 |
0,67 |
60,74 |
145,0 |
18,42 |
513,3 |
8,45 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
zamknięty |
5 |
403 |
0,24 |
64 |
0,5 |
0,2 |
0,66 |
67,02 |
160,0 |
20,32 |
164,1 |
2,45 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
5 |
403 |
0,6 |
62 |
2,5 |
4 |
0,66 |
64,92 |
155,0 |
19,69 |
233,7 |
3,60 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
5,2 |
403 |
0,93 |
61 |
5 |
8 |
0,66 |
63,88 |
152,5 |
19,37 |
307,4 |
4,81 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
5,5 |
403 |
1,29 |
60 |
7 |
12 |
0,66 |
62,83 |
150,0 |
19,05 |
378,6 |
6,03 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
5,6 |
403 |
1,59 |
59 |
9 |
16 |
0,66 |
61,78 |
147,5 |
18,73 |
447,2 |
7,24 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
5,9 |
403 |
1,92 |
58 |
11,5 |
20 |
0,66 |
60,74 |
145,0 |
18,42 |
513,3 |
8,45 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
otwarty |
5 |
403 |
0,3 |
100 |
1 |
0,1 |
0,19 |
104,72 |
250,0 |
31,75 |
253,2 |
2,42 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
5,2 |
403 |
0,84 |
97 |
4,5 |
4 |
0,19 |
101,58 |
242,5 |
30,80 |
365,7 |
3,60 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
5,5 |
403 |
1,35 |
96 |
7,5 |
8 |
0,19 |
100,53 |
240,0 |
30,48 |
483,8 |
4,81 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
5,9 |
403 |
1,95 |
93 |
11,5 |
12 |
0,19 |
97,39 |
232,5 |
29,53 |
586,8 |
6,03 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
6,4 |
403 |
2,4 |
91 |
16,5 |
16 |
0,19 |
95,29 |
227,5 |
28,89 |
689,8 |
7,24 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
6,9 |
403 |
2,94 |
90 |
19 |
20 |
0,19 |
94,25 |
225,0 |
28,58 |
796,5 |
8,45 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
zamknięty |
5,1 |
403 |
0,3 |
100 |
1 |
0,4 |
0,19 |
104,72 |
250,0 |
31,75 |
262,7 |
2,51 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
5,3 |
403 |
0,84 |
97 |
4,5 |
4 |
0,19 |
101,58 |
242,5 |
30,80 |
365,7 |
3,60 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
5,5 |
403 |
1,35 |
95 |
7,5 |
8 |
0,19 |
99,48 |
237,5 |
30,16 |
478,8 |
4,81 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
5,9 |
403 |
1,89 |
92 |
11,5 |
12 |
0,19 |
96,34 |
230,0 |
29,21 |
580,5 |
6,03 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
6,4 |
403 |
2,4 |
91 |
15,5 |
16 |
0,19 |
95,29 |
227,5 |
28,89 |
689,8 |
7,24 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
6,9 |
403 |
2,94 |
90 |
18,5 |
20 |
0,19 |
94,25 |
225,0 |
28,58 |
796,5 |
8,45 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
otwarty |
5 |
403 |
0,39 |
138 |
2 |
0,2 |
0,01 |
144,51 |
345,0 |
43,82 |
353,8 |
2,45 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
5,3 |
403 |
1,2 |
134 |
7 |
4 |
0,01 |
140,32 |
335,0 |
42,55 |
505,2 |
3,60 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
5,8 |
403 |
1,95 |
132 |
12 |
8 |
0,01 |
138,23 |
330,0 |
41,91 |
665,3 |
4,81 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
6,5 |
403 |
2,7 |
130 |
17,5 |
12 |
0,01 |
136,13 |
325,0 |
41,28 |
820,3 |
6,03 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
6,8 |
403 |
2,95 |
111 |
18,5 |
16 |
0,07 |
116,24 |
277,5 |
35,24 |
841,4 |
7,24 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
7,1 |
403 |
3 |
93 |
19,5 |
20 |
0,15 |
97,39 |
232,5 |
29,53 |
823,1 |
8,45 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
zamknięty |
5 |
403 |
0,36 |
138 |
2 |
0,2 |
0,01 |
144,51 |
345,0 |
43,82 |
353,8 |
2,45 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
5,3 |
403 |
1,14 |
134 |
6,5 |
4 |
0,01 |
140,32 |
335,0 |
42,55 |
505,2 |
3,60 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
5,8 |
403 |
1,92 |
133 |
11,5 |
8 |
0,01 |
139,27 |
332,5 |
42,23 |
670,3 |
4,81 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
6,7 |
403 |
2,7 |
128 |
17,5 |
12 |
0,01 |
134,04 |
320,0 |
40,64 |
807,7 |
6,03 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
6,9 |
403 |
2,95 |
110 |
19 |
16 |
0,07 |
115,19 |
275,0 |
34,93 |
833,8 |
7,24 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
7,1 |
403 |
3,06 |
92 |
19,5 |
20 |
0,15 |
96,34 |
230,0 |
29,21 |
814,2 |
8,45 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
3. Wnioski.
Do regulacji prędkości kątowej silników indukcyjnych pierścieniowych współcześnie wykorzystuje się powszechnie półprzewodnikowe układy z pośredniczącym obwodem prądu stałego, w którym działa napięcie zewnętrzne sterujące prędkością silnika. Źródłem zewnętrznym napięcia sterującego może być falownik zależny komutowany przez sieć zasilającą lub obcowzbudna maszyna prądu stałego sprzęgnięta mechanicznie z silnikiem indukcyjnym. W pierwszym przypadku jest to układ podsynchronicznej kaskady przekształtnikowej na stały moment (M=const.), a w drugim układ podsynchronicznej kaskady na stałą moc (P=const). W ćwiczeniu przebadaliśmy obydwa rodzaje układów. W wyników ćwiczenia można wyciągnąć wniosek, że kaskada typu P=const. jest korzystniejsza, gdyż odznacza się większą stabilnością prędkości kątowej silnika indukcyjnego klatkowego, co widać bezpośrednio z wykresów. Z kolei ze względu na charakterystyki M=f(Id), większą stabilność wykazuje kaskada typu M=const.
Wyszukiwarka
Podobne podstrony:
PROT21, sprawozdanie z nap˙du
Sprawozdanie 2 - analiza otrzymanej próbki soli, Politechika Białostocka, budownictwo semestr I 2013
Nap%c4%99d statku
Układ automatycznej regulacji sprawozdanie
GB napŕd, Automatyka i robotyka air pwr, VI SEMESTR, Notatki.. z ASE, naped elektrryczny lab, od chl
napŕd 1, Automatyka i robotyka air pwr, VI SEMESTR, Notatki.. z ASE, naped elektrryczny lab, od chlo
podstawy automatyki regulacja sprawozdanie
A-11CD 2, W sprawozdaniu b˙˙dnie obliczyli˙my Dg poniewa˙ przyj˙li˙my b˙˙d pomiaru k˙ta Df=5o nie p
Sterowanie napŕdem robota, ster nap rob, Politechnika Śląska
Sławomir Jawień sprawozdanie z nap pow
REGULATOR PID, SGGW Technika Rolnicza i Leśna, Automatyka, Sprawozdania
Regulamin walnego sprawozdawczo - wyborczego zgromadzenia członków koła, wędkarstwo
16 ?d przemieszczeń kratownicy sprawozdanie
07 lab ster elektr nap mat na sprawozd
DOBÓR NASTAW REGULATORÓW W MODELOWYM UKŁADZIE AUTOMATYCZNEJ REGULACJI, SGGW Technika Rolnicza i Leśn
A-11CD, W sprawozdaniu b??dnie obliczyli?my Dg poniewa? przyj?li?my b??d pomiaru k?ta Df=5o nie prz
więcej podobnych podstron