CZĘŚĆ III: TRANSMISJA MOMENTU TRAKCYJNEGO
POMIĘDZY OSIAMI WZGLĘDEM SIEBIE RUCHOMYMI
Rozdział 8.
MECHANIZMY KOMPENSACJI NIEWSPÓŁOSIOWOŚCI W NAPĘDACH TRAKCYJNYCH
8.1. Trakcyjny napęd łańcuchowy z kompensacją niewspółosiowości.
Napęd łańcuchowy pojazdów jednośladowych, motocykli i rowerów, jest znany powszechnie. Jego szeregowa struktura mechaniczna jest czytelna w sposób oczywisty, gdyż napędzane jest tylko jedno koło pojazdu.
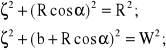
Rozważymy mechanikę napędu łańcuchowego gdy usprężynowane tylne koło pojazdu jest w prowadzone ramie za pomocą wahacza o promieniu R, wahliwie osadzonego w jego gnieździe obrotu. Napęd trakcyjny jest transmitowany na koło napędowe od zębatki silnika osadzonego w ramie pojazdu. Podstawowe wymiary geometryczne układu przedstawiono na rysunku 1.
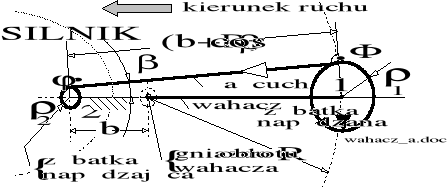
Rysunek 8.1. Układ łańcuchowego napędu koła motocykla w pozycji "zerowej", przed narzuceniem obrotu wahacza w gnieździe.
Oznaczenia: - kąt pochylenia cięgna (łańcucha);
b - odległość osi zębatki napędzającej i gniazda wahacza;
R - promień wahacza;
- promień zębatki łańcuchowej
1, 2 - indeksy odnoszące się do zębatek koła i silnika;
i - przełożenie przekładni łańcuchowej.
Jako wielkości stałe, charakteryzujące geometrię i kinematykę analizowanego układu, przyjmijmy następujące współczynniki - parametry tego układu:
![]()
(8.1)
Z chwilą narzucenia obrotu wahacza o kąt , konfiguracja układu zmienia się. Odległość osi zębatek nieco się zmniejsza o wielkość l: z początkowej wartości (b+R), do wartości W "na przełaj" w nowym położeniu. Zmienia się też czynna długość łańcucha. Także początkowa wartość kąta nachylenia łańcucha w stosunku do prostej łączącej środki obydwóch zębatek nieznacznie się zmienia. Nowy układ geometryczny napędu łańcuchowego pokazano na rysunku 8.2.
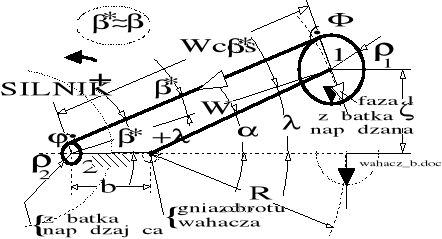
Rysunek 8.2. Układ łańcuchowego napędu koła motocykla po narzuceniu obrotu wahacza w lewym kierunku, ku górze.
Obrót wahacza zachodzi w lewo lub w prawo, zawsze w otoczeniu położenia "zerowego". Przykładowo rozważymy obrót w lewo. Kierunek obrotu w lewo będziemy dalej traktować jako dodatni.
Dla sporządzeniu zapisu następstw zmiany geometrycznej konfiguracji układu będziemy przyjmować, że początkowe kątowe położenie zębatki napędzanej "1", po narzuceniu obrotu ramienia wahacza o kąt pozostało niezmienione, co pokazano na obydwóch rysunkach przez naniesienie znacznika.
Odnośnie kąta pochylenia osi cięgna - łańcucha w stosunku do prostej łączącej środki zębatek możemy napisać:
![]()
(8.2)
W praktyce, z dobrym przybliżeniem można przyjmować, *.
Należy zauważyć, że przy niezmienionym położeniu kątowym zębatki napędzanej, skróceniu aktywnej części łańcucha o wielkość l towarzyszył dodatkowy obrót aktywnej zębatki silnika w lewo o kąt l.
(3)
Równocześnie także wystąpił obrót zębatki silnika wywołany obrotem wahacza. Obrót ten możemy sobie wyobrazić w dwóch fazach. W fazie pierwszej, zębatka napędzana "1", pozostając w pozycji obrotowo unieruchomionej w stosunku do ramienia wahacza, wywołuje obrót zębatki silnika "2" w lewo o kąt tak, jakby łańcuch był sztywnym prętem, przyłączonym przegubowo do obydwóch zębatek na ich promieniach. W fazie drugiej, przywracamy początkowe, pionowe położenie znacznika zębatki "1" przez obrót tej zębatki w prawo o kąt . Tym samym, także zębatka "2" obróci się w prawo lecz o kąt odpowiednio większy, wynikający ze stosunku promieni obydwóch zębatek.
(8.4)
Wypadkowy obrót zębatki silnika "2", wynikający wyłącznie z uniesienia koła motocykla w stosunku do ramy o wielkość , czyli wynikający z obrotu wahacza, jest sumą wyżej opisanych kątowych przemieszczeń składowych:
![]()
(8.5)
W dalszym ciągu będziemy korzystać z rozwinięć funkcji trygonometrycznych w szereg ograniczając się do uwzględnienia argumentu w potędze co najwyżej drugiej.
(8.6)
i podobnie:
![]()
(8.7)
Wielkość W możemy wyznaczyć porównując dwa prostokątne trójkąty występujące na rysunku 8.2, których jedną przyprostokątną - w obydwóch przypadkach - stanowi wielkość , zaś przeciwprostokątną jest kolejno R i W.
(8.8)
Po wykonaniu elementarnych przekształceń z wykorzystaniem oznaczeń (8.1), otrzymujemy:
![]()
(8.9)
Na mocy (8.3), korzystając z (8.6) i (8.9), możemy otrzymać zapis pierwszej składowej dodatkowego obrotu zębatki "2" silnika:

(8.10)
Pierwsze po prawej stronie znaku równości wyrażenie w nawiasie kwadratowym, po uwzględnieniu zapisu (8.9), może zostać przekształcone do znacznie prostszej postaci według (zamieszczonych w każdym poradniku matematyki wyższej) zasad rachunku przybliżonego: ![]()
Wzór ten zapewnia dokładność poniżej 1%, gdy -0,247a2<x<0,328a2, co w omawianym przypadku technicznym, zawsze jest spełnione. Postępując według powyższego schematu, otrzymujemy:
![]()
![]()
(8.11)
Druga składowa obrotu zębatki "2", zgodnie z (8.4), (8.7) i (8.9), zawiera ![]()
w mianowniku:
![]()
(8.12)
W tym przypadku rachunek przybliżeń przynosi wzór następujący: ![]()
![]()
który także zapewnia dobrą dokładność, poniżej 1%, gdy: 0,157a2<x<0,166a2, co, podobnie jak poprzednio, w omawianym przypadku technicznym, zawsze jest spełnione. Postępując według powyższego schematu, przy zachowaniu wyrazów zawierających w potędze co najwyżej drugiej, otrzymujemy kolejno:

![]()
(8.13)
Całkowity obrót zębatki silnika jest opisany wzorem (8.5), przy wykorzystaniu (8.10), (8.11) i (8.13). Otrzymujemy więc ostatecznie:

(8.14)
Teraz jest miejsce na zwięzłą dyskusję jakościową transmisji momentu. W ruchu pojazdu po nierównościach drogi zarówno wielkość =(t) jak też wielkości , , W, , są funkcjami czasu. Z punktu widzenia transmisji momentu trakcyjnego zmienna w czasie wartość stanowi źródło zaburzeń dynamicznych w układzie napędowym i powoduje zarówno niszczenie mechanicznego układu transmisji momentu jak też sprawia, że pokonywane nierówności drogi, w sposób nieuchronny, odwzorowują się dynamicznie w szkodliwych zaburzeniach prędkości zarówno samego silnika jak też całego pojazdu.
Oznaczając ![]()
otrzymujemy wzór opisujący kątowe zaburzenie prędkości zębatki silnika w funkcji zaburzeń położenia i prędkości koła pojazdu. W podobny sposób możemy otrzymać zapis sprzężenia przyspieszeń.

(8.15)
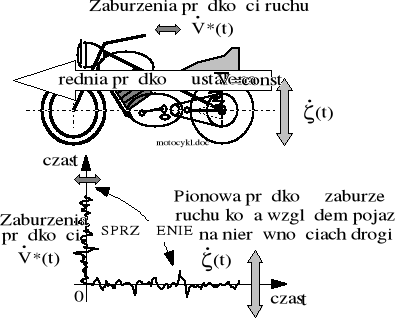
Rysunek 8.3. Pojęciowa ilustracja sprzężenia pionowych prędkości ruchu koła względem ramy z teoretycznymi zaburzeniami prędkości ruchu pojazdu.
Sprzężenie zaburzeń pionowego położenia koła względem ramy w ruchu pojazdu po nierównościach drogi (t) z wielkością opisującą zmianę obrotowego położenia zębatki silnika, według rysunku 8.2 i wzoru (8.14), będziemy nazywać funkcją położenia przekładni łańcuchowej. Każde zaburzenie kątowego położenia zębatki silnika wywołuje zaburzenie położenia w ruchu całego pojazdu. To samo dotyczy prędkości i przyśpieszeń. Oczywiście, całkowite uniknięcie szkodliwego sprzężenia zaburzeń obrotowego ruchu zębatki silnika z nierównościami drogi jest możliwe, gdy są równocześnie spełnione dwa warunki: i=1; oraz =0, [czyli b=0]. Tylko wtedy jest możliwy płynny, niezaburzony ruch obrotowy silnika przy dowolnej, także płynnej, niezaburzonej prędkości ruchu pojazdu poruszającego się wzdłuż drogi po jej nierównościach.
W praktyce sprzężenie to jest przez większość producentów ignorowane: w motocyklach rajdowych nikt nie troszczy się o komfort podróżowania i trwałość pojazdu; na asfalcie zaś nierówności drogi są znikome.
Istnieje jeszcze trzecia przyczyna zaburzeń ruchu układu przy napędzie łańcuchowym. Tą przyczyną jest immanentna cecha kinematycznej współpracy łańcucha Galla z zębatką.
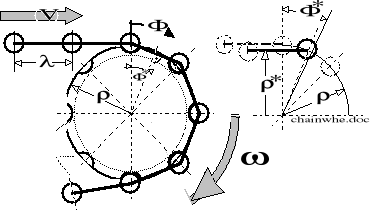
Rysunek 8.4. Schemat kinematycznej współpracy łańcucha z zębatką.
VŁ - prędkość ruchu łańcucha
Na podstawie rysunku 4, możemy napisać:

(8.16)
Promień * zmienia się w zakresie ruchu zębatki od kąta położenia -* do wartości +*. W tym zakresie kąta, przy ustalonej prędkości obrotowej zębatki, czas t zawiera się w granicach: -t*<t<+t*; ![]()
Prędkość łańcucha wynosi więc VŁ(t) =*; *=*(t); albo VŁ(t)=cost;
Prędkość średnia łańcucha wynosi:

(8.17)
Omówiliśmy trzy źródła zaburzeń ruchu w układzie napędu łańcuchowego:
- obrót wahacza oraz zębatki silnika na nierównościach drogi,
- zmianę odległości osi i roboczej długości łańcucha,
- niesynchroniczną współpracę kinematyczną łańcucha z zębatką.
Zaburzenia te, występując łącznie, wzbudzają poprzeczne drgania łańcucha i stanowią przyczynę szybkozmiennych obciążeń dynamicznych, powodując hałas i zmęczeniowe zużycia elementów napędu. Obciążenia dynamiczne w znacznym stopniu są kompensowane podłużnymi, sprężystymi odkształceniami łańcucha.
169
Wyszukiwarka
Podobne podstrony:
ROZDZ 8U, PW SiMR, Inżynierskie, Semestr V, syf, laborki, Uklady napedowe, MTMT
ROZDZ 8K, PW SiMR, Inżynierskie, Semestr V, syf, laborki, Uklady napedowe, MTMT
ROZDZ 8C, PW SiMR, Inżynierskie, Semestr V, syf, laborki, Uklady napedowe, MTMT
ROZDZ 10B, PW SiMR, Inżynierskie, Semestr V, syf, laborki, Uklady napedowe, MTMT
ROZDZ 8E, PW SiMR, Inżynierskie, Semestr V, syf, laborki, Uklady napedowe, MTMT
ROZDZ 5A, PW SiMR, Inżynierskie, Semestr V, syf, laborki, Uklady napedowe, MTMT
ROZDZ 8G, PW SiMR, Inżynierskie, Semestr V, syf, laborki, Uklady napedowe, MTMT
ROZDZ 8O, PW SiMR, Inżynierskie, Semestr V, syf, laborki, Uklady napedowe, MTMT
ROZDZ 10A, PW SiMR, Inżynierskie, Semestr V, syf, laborki, Uklady napedowe, MTMT
ROZDZ 7A, PW SiMR, Inżynierskie, Semestr V, syf, laborki, Uklady napedowe, MTMT
ROZDZ 8P, PW SiMR, Inżynierskie, Semestr V, syf, laborki, Uklady napedowe, MTMT
ROZDZ 8T, PW SiMR, Inżynierskie, Semestr V, syf, laborki, Uklady napedowe, MTMT
COVER, PW SiMR, Inżynierskie, Semestr V, syf, laborki, Uklady napedowe, MTMT
TBL891, PW SiMR, Inżynierskie, Semestr V, syf, laborki, Uklady napedowe, MTMT
TBL871, PW SiMR, Inżynierskie, Semestr V, syf, laborki, Uklady napedowe, MTMT
TBL872, PW SiMR, Inżynierskie, Semestr V, syf, laborki, Uklady napedowe, MTMT
ACOVER, PW SiMR, Inżynierskie, Semestr V, syf, laborki, Uklady napedowe, TeoRuch
A-rys1-10, PW SiMR, Inżynierskie, Semestr V, syf, laborki, Uklady napedowe, TeoRuch
A-Rzdz3, PW SiMR, Inżynierskie, Semestr V, syf, laborki, Uklady napedowe, TeoRuch
więcej podobnych podstron