8.5. Sprzęgła wychylne.
W transmisji momentu trakcyjnego pomiędzy osiami względem siebie ruchomymi najpowszechniej stosowane są wały przegubowe wyposażone w dwa sprzęgła wychylne. Tego rodzaju transmisja momentu ma ogromne zastosowania ogólnomaszynowe: w pojazdach samochodowych i w pojazdach szynowych, w transportowych jednostkach latających i pływających, w maszynach rolniczych i w walcarkach hutniczych.
Jako sprzęgło wychylne historycznie najbardziej znany jest przegub krzyżakowy, znany też jako sprzęgło (przegub) Cardana lub sprzęgło Hooke'a. Jego poprawne zastosowanie wymaga przede wszystkim gruntownej znajomości kinematyki.
Sprzęgło jednoramienne stanowi najogólniejszy rodzaj mechanizmu (typu H - według tabeli 8.1) pozwalającego realizować przez wał bierny B wszystkie pięć stopni ruchliwości względem wału aktywnego A: wysuwność, wychylność w dwóch płaszczyznach i odsuwność w dwóch płaszczyznach. Sprzęgło jednoramienne, jako najogólniejsza, przestrzenna postać strukturalna mechanizmu transmisji momentu, stanowi punkt wyjścia do badania kinematyki wszystkich wychylnych sprzęgieł będących mechanizmami klasycznymi.
8.5.1 Badanie (wspólne) kinematyki sprzęgła jednoramiennego oraz sprzęgła krzyżakowego metodą geometrii analitycznej.
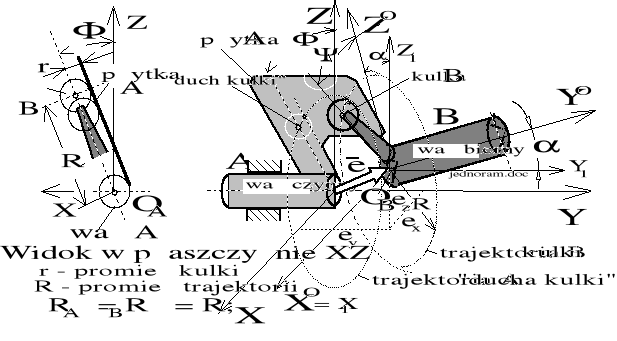
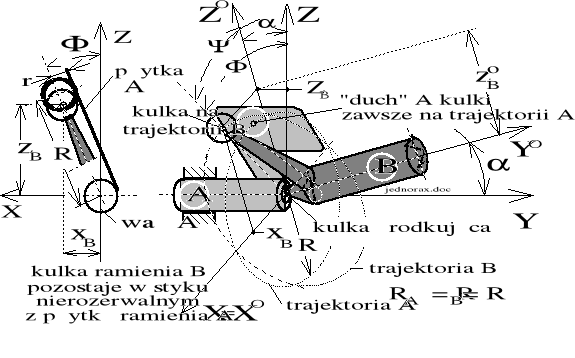
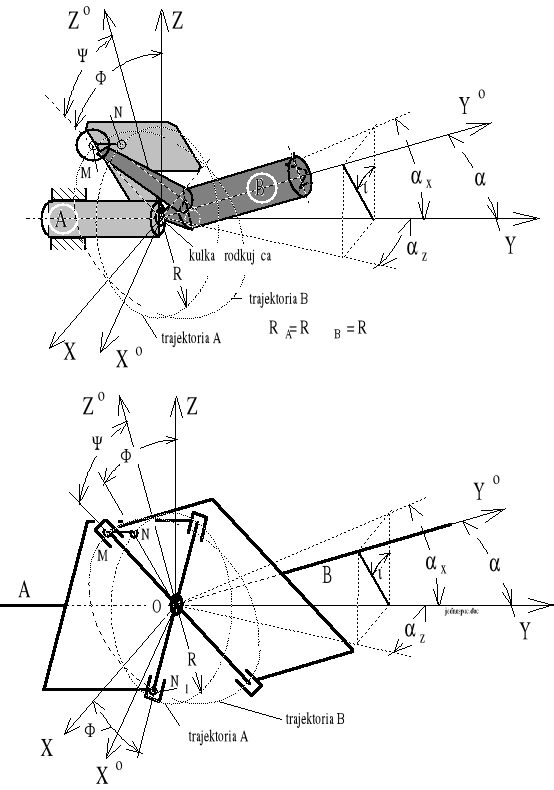
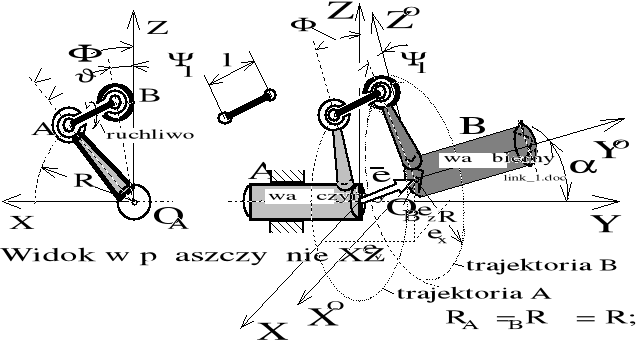
Rysunek 8.23. Schematyczny rysunek sprzęgła jednoramiennego z naniesionymi układami współrzędnych przyporządkowanymi do osi wałów: aktywnego A i biernego B.
Na rysunku 8.23. pokazano dwa układy współrzędnych związanych z odcinkami wałow aktywnego i czynnego. Z wałem A jest związany układ OAXYZ zaś z wałem B - układ OBXYZ.
Układ OBX1Y1Z1 jest układem pomocniczym, pośredniczącym pomiędzy układami, w których opisuje się położenia wałów aktywnego i biernego.
Transformacje pomiędzy układami współrzędnych: OAXYZ i OBX1Y1Z1 oraz OBX1Y1Z1 i OBXYZ są następujące:
(8.73)
(8.74)
Przed narzuceniem niewspółosiowości obydwóch obracających się wałów A i B, kulka styka się z płaszczyzną ramienia A zawsze w jednym punkcie. Z chwilą narzucenia niewspółosiowości kulka ramienia B, przemieszcza się w różne miejsca nie tracąc kontaktu z płaszczyzną ramienia A.. Na miejscu, przy płytce, pozostaje jedynie "duch kulki" oznaczony na rusunku jako biała, okrągła plamka.
Zapisy współrzędnych położenia środka "ducha kulki" na ramieniu A w układzie OAXYZ oraz kulki rzeczywistej ramienia B w układzie współrzędnych OBXYZ są bardzo proste:
(8.75)
Funkcja = (,ex,ey,ez,) stanowi opis kinematyki sprzęgła. Funkcja położenia sprzęgła wyraża się jako: ![]()
Funkcję tę wyznacza się korzystając ze związków (8.73), (8.74) i (8.75) traktując wektor niewspółosiowości "e" oraz promień ramienia wału R jako wielkości znane i stałe. Wielkość jest traktowana jako parametr; = (t)..
Sprzęgło przedstawione na rysunku powyżej nie stanowi struktury użytecznej w technice trakcyjnej. Dlatego rozważymy przypadek szczególny sprzęgła wychylnego (modelowo bardzo użyteczny): ex=0;,ey=0;,ez=0;
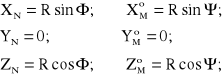
Korzystając z rysunku 8.24 możemy napisać:
![]()
(8.76)
Należy przy tym pamiętać, że XA= XB.
Po podstawieniu (8.75) (po uporządkowaniu indeksów) do (8.73), (8.74) i (8.76) otrzymujemy wzór ścisły opisujący kinematykę sprzęgła:
![]()
(8.77)
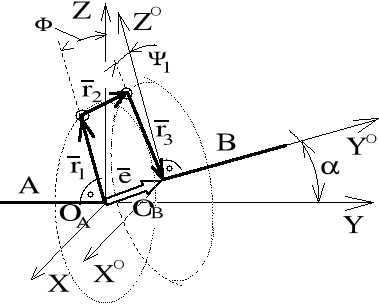
Rysunek 8.24. Schemat wzajemnie środkowanych wałów połączonych sprzęgłem jednoramiennym.
Podstawiając do (8.77) zapis: ![]()
z uwzględnieniem pierwszego wyrazu rozwinięcia, w szereg potęgowy, funkcji trygonometrycznych zawierających , jednakże przy uwzględnieniu rozwinięcia (w szereg) funkcji z dokładnością do drugiej potęgi wyrazów małych, otrzymujemy kolejno:
(8.78)
skąd bezpośrednio, po podstawieniu do (8.77), otrzymujemy:
![]()
(8.79)
Wzór (8.79), z uwzględnieniem zależności: ![]()
jest przybliżonym (technicznym) odpowiednikiem ścisłego wzoru (8.77). W tym miejscu należy zauważyć, że znak "" w ostatnim wyrażeniu zmieni się na "+", gdy kąt (według rysunków 8.23 i 8.24), będzie odmierzany od osi X do ramienia wału A.
Na rysunku 8.25 została przedstawiona strukturalne modyfikacja sprzęgła jednoramiennego ze środkowaniem wałów do postaci - powszechnie znanego i w technice szeroko stosowanego - sprzęgła krzyżakowego.
Poszczególne fazy modyfikacji prowadzą najpierw do sprzęgła krzyżakowego w odmianie jarzmowej a następnie do klasycznego sprzęgła krzyżakowego. Wzór (8.79) zachowuje moc dla sprzęgła krzyżakowego gdy w konfiguracji wału w prawoskrętnym układzie współrzędnych, pokazanym na rysunku 8.23, kąt jest odmierzany od osi Z do osi widełek wału A. Porównując bowiem etapy konfiguracji widzimy, że na rysunkach 8.23 i 8.24 kąt jest odmierzany nie do [tam niewystępującej] "osi widełek" lecz do ramienia prostopadłego do tej osi. Dodatni znak we wzorze (8.79) wystąpi więc, gdy odmierzanie kąta ma miejsce według zasad pokazanych na dolnych rysunkach 8.25 dotyczących obydwóch odmian sprzęgła krzyżakowego.
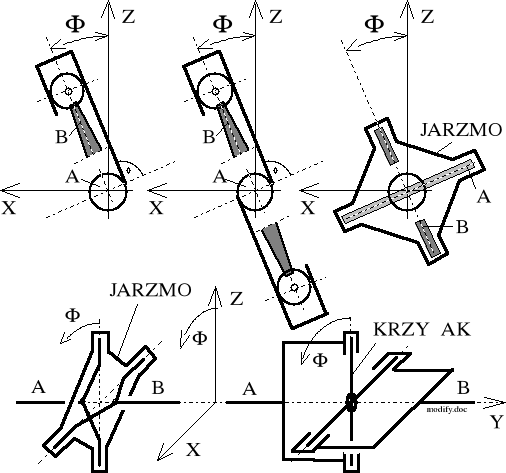
Rysunek 8.25. Modyfikacja jednoramiennego sprzęgła ze środkowaniem wałów do postaci sprzęgła krzyżakowego.
W przypadku przestrzennego załamania osi wałów tak, że występują dwie składowe kąta : x i z, kinematyka sprzęgła jednoramiennego ze środkowaniem i kinematyka sprzęga krzyżakowego są jednakowe.
Wzór ścisły ma następującą postać:
![]()
(8.80)
Wzór przybliżony ma następującą postać;
(8.81)
Ostatnie dwa wzory obowiązują dla konfiguracji geometrycznej układu wałów według rysunku 8.26, gdzie kąt z - w prawoskrętnym układzie współrzędnych - ma znak ujemny. Przy przestrzennym załamaniu osi wałów o kąt , punkt N, należący do ramienia B, z trajektorii A przemieszcza się do miejsca M, znajdującego się na trajektorii B. Punkt M przemieszcza się po trajektorii B.
Rysunek 8.26. Układ sprzęgła jednoramiennego ze środkowaniem wałów oraz układ sprzęgła krzyżakowego pomiędzy wałami o osiach załamanych przestrzennie. Kąt "" wskazuje pochylenie płaszczyzny załamania wału B.
Przy odmierzaniu kąta od osi Z do osi fizycznego ramienia wału A, we wzorze (8.81) wystąpi znak dodatni.
Kąty obrotu w tulejkach sprzęgła krzyżakowego
Zgodnie z rysunkiem 8.26, współrzędne położenia punktów N w układzie OXYZ oraz M w układzie OXYZ, są następujące:
(8.82)
Bezpośrednia transformacja przestrzenna współrzędnych opisanych wukładzie OXYZ do układu OXYZ jest następująca:
(8.83)
Skąd bezpośrednio otrzymujemy:
zatem, zgodnie z (8.82), możemy napisać:
(8.84)
Biorąc pod uwagę zależność: ![]()
otrzymuje się ścisły zapis kinematyki sprzęgła jednoramiennego (8.80).
Kinematyka sprzęgła jednoramiennego stanowi punkt wyjścia do badania kinematyki wielu odmian sprzęgieł wychylnych.
Wprowadźmy następujące oznaczenia według rysunku 8.26:
YM - bieżące poosiowe przemieszczenie punktu M w stosunku do trajektorii A;
N1 - kąt nachylenia prostej OM w stosunku do płaszczyzny XZ lub kąt obrotu czopa krzyżaka w łożysku N1 widełek wału A.
M - kąt nachylenia prostej ON1 w stosunku do płaszczyzny XZ lub kąt obrotu czopa krzyżaka w łożysku M widełek wału B.
Ponieważ, zgodnie z (8.84), ![]()
,
to z drugiej strony możemy napisać:
![]()
(8.85)
i podobnie dla punktu N1:
![]()
![]()
(8.86)
Wzory (8.85) i (8.86) opisują kątowe położenia czopa krzyżaka w widełkach. Wzory te są bardzo użyteczne przy projektowaniu łożysk widełek wału krzyżakowego.
8.5.2. Kinematyka sprzęgieł cięgłowych znakonieprzemiennych.
Znakookreśloność sprzęgła cięgłowego wyznaczają znaki napięć w cięgle (w cięgłach). Jeśli znaki napięć we wszystkich cięgłach sprzęgła są jednakowe (ściskanie - lub rozciąganie +) to sprzęgło jest znakonieprzemienne. Sprzęgła cięgłowe mogą być parzystocięgłowe albo nieparzystocięgłowe. Ze względu na konieczność zachowania "symetrii przez obrót", sprzęgła nieparzystocięgłowe są zawsze znakonieprzemienne. Sprzęgła parzystocięgłowe mogą być zarówno znakoprzemienne jak i znakonieprzemienne.
Sprzęgła cięgłowe znakonieprzemienne mają więc jednakowe (wszystkie dodatnie lub wszystkie ujemne) znaki napięć we wszystkich cięgłach. Zgodnie z powyższymi uwagami, mogą występować zarówno jako nieparzystocięgłowe lub parzystocięgłowe.
Badanie kinematyki rodziny wychylnych sprzęgieł znakonieprzemiennych najprościej jest rozpocząć od analizy sprzęgła jednocięgłowego - przypadku nietechnicznego. W technice - z tej rodziny - najczęściej występują sprzęgła dwucięgłowe i trójcięgłowe, niekiedy strukturalnie zdwojone szeregowo lub równolegle.
Rysunek 8.27. Schemat jednoramiennego sprzęgła cięgłowego. Kąt położenia ramienia wału A oznaczono jako . Kąt położenia ramienia wału B, [tylko] w przypadku zerowej długości cięgła oznaczono jako . W układach fizycznych długość cięgła jest [zawsze skończona i dość] znaczna. Kąt położenia fizycznego ramienia wału biernego oznaczono jako 1. Obydwa ramiona mają jednakowy promień osadzenia przegubu kulistego. Przeguby kuliste w cięgle sprawiają, że każde cięgło ma jeden własny stopień kinematycznej ruchliwości wewnętrznej.
Możemy wyodrębnić dwie szczegółowe odmiany eksploatacyjne sprzęgieł znakonieprzemiennych: a) gdy ramię wału A porusza się przed ramieniem wału B (znak górny) oraz b), gdy ramię wału B porusza się przed ramieniem wału A (znak dolny):
![]()
(8.87)
Szeregowe zdwojenie tworzy wał przegubowy. Różne kombinacje struktur szeregowo zdwojonych przynoszą skutki kinematyczne w postaci specyficznych charakterystyk zaburzeń ruchu obrotowego. Statycznie wyznaczalne struktury pojedynczych sprzęgieł i struktury zdwojone szeregowo mogą nie zawierać elementów sprężyście podatnych. W obrębie każdego statycznie wyznaczalnego cięgłowego sprzęgła wychylnego występują jednakowe znaki napięć w cięgłach.
Równoległe zdwojenie sprzęgieł odbiera stopnie ruchliwości kinematycznej, często tworzy struktury statycznie niewyznaczalne i wtedy wprowadza do struktury sprzęgła wychylnego wewnętrzny kontur dynamiczny (jeden lub więcej). Warunkiem wychylnej pracy struktur statycznie niewyznaczalnych jest obecność wewnętrznych więzów sprężyście podatnych. Równoległe zdwojenie przynosi także skutki kinematyczne, na ogół korzystne lecz kosztem zwiększonych napięć więzów sprężystych. Równoległe zdwojenie sprzęgieł wychylnych stanowi o parzystej liczbie ich cięgieł. Sprzęgła parzystocięgłowe mogą tworzyć odmiany znakoprzemienne i znakonieprzemienne. Niniejszy rozdział dotyczy tylko cięgłowych sprzęgieł znakonieprzemiennych.
Rysunek 8.28. Kontur wektorowy cięgłowego sprzęgła jednoramiennego
![]()
(8.88)
Trajektoria końca ramienia A w układzie OAXYZ oraz końca ramienia B w układzie współrzędnych OBXYZ ma zapis następujący:
(8.89)
Położenie końca ramienia B w układzie współrzędnych OAXYZ jest opisane następująco:
(8.90)
Pierwsze człony po prawej stronie znaku równości w powyższych równaniach opisują rzuty modułu wektora r3 na osie układu współrzędnych OAXYZ. Aby wyznaczyć rzuty modułu wektora r2 należy rozwiązać następujący układ równań konturu wektorowego stanowiący bilanse rzutów poszczególnych składowych konturu na osie wspólrzędnych.
(8.91)
Należy zauważyć, że musi być spełnione następujące równanie więzów geometrycznych jakie stanowi cięgło pomiędzy elementami A i B:
![]()
(8.92)
Wielkości r2j; (j=x,y,z) wyznaczamy z równań (8.91). Po ich podstawieniu do (8.92), otrzymujemy:
![]()
(8.93)
gdzie oznaczono:
(8.94)
Prawa strona (8.93) może zostać przedstawiona w postaci:

(8.95)
Dla N cięgieł istnieje N równań typu (8.93). Jeżeli ramiona są w sprzęgłe rozmieszczone równomiernie na obwodzie to ze względów konstrukcyjnych występuje zależność: ![]()
Podobnie jak przedstawiono prawą stronę równania (8.93) w postaci (8.95) tak też można przedstawić lewą stronę tego równania:
![]()
(8.96)
Dla N cięgieł otrzymamy N takich równań.
Przypadek sprzęgła dwucięgłowego
(8.97)
Dla przypadku technicznego '=, otrzymujemy:
![]()
(8.98)
Dodając i odejmując stronami równania (8.97) otrzymujemy:
(8.99)
W powyższych równaniach zastosujemy rachunek przybliżeń:
Po zastosowaniu rozwinięcia funkcji trygonometrycznych występujących w (8.99) w szereg Maclaurina dookoła wielkości małych, otrzymujemy równanie kinematyki sprzęgła wychylno - wysuwnego dla ruchu obrotowego:
![]()
(8.100)
Wprowadzając zapis: =+, gdzie - funkcja położenia sprzęgła, możemy zapisać jawną postać tej funkcji dla wychylno - wysuwnej pracy sprzęgła.
![]()
(8.101)
gdzie znaki górne odnoszą się do przypadku a), kiedy ramię wału A porusza się przed ramieniem wału B. Należy zauważyć, że dla przypadku konstrukcyjnego
![]()
otrzymujemy przypadek szczególny sprzęgła, które ma własności kinematyczne identyczne jak sprzęgło krzyżakowe:
![]()
Odnośnie uwzględnienia możliwości odsuwnej pracy sprzęgła, z wyrażeń (8.97) i (8.99) otrzymujemy:
![]()
Oznacza to, że wielkości x i z są od siebie zależne. Sprzęgło zachowuje się jako prowadnik między osiami A i B w płaszczyźnie XZ. W technice napędu maszyn z wykorzystaniem ruchu obrotowego taki przypadek nie jest użyteczny. Wały A i B, przy zastosowaniu sprzęgieł dwucięgłowych powinny być względem siebie środkowane przez narzucenie więzów dodatkowych.
Przypadek sprzęgła trójcięgłowego
dla trzech cięgieł otrzymujemy 3 równania typu (8.96).
(8.102)
W rozwiniętej postaci (jawnej) przedstawionego układu trzech równań występują trzy niewiadome: ![]()
Wielkość zmienną y traktujemy jako narzuconą i znaną (parametr).
Rozwiązania powyższego układu dla równomierergo rozstawu ramion,
'=2/3, przedstawiają się następująco:
(8.103)
Z powyższego wynika, że w przypadku =const; y = const, sprzęgło jest obrotowo synchroniczne.
Punkt OB w układzie OAXYZ na płaszczyźnie XZ zakreśla okrąg o równaniu:

(8.104)
Zgodnie (8.103) i (8.104), punkt OB zatacza na płaszczyźnie XZ okrąg z prędkością kątową trzykrotnie większą aniżeli prędkość kątowa wału A.
Konkluzje do p. 8.5.2.
Sprzęgło dwucięgłowe przy niezerowym kącie załamamia osi wałów A i B jest niesynchroniczne;
Sprzęgło dwucięgłowe wymaga poprzecznego środkowania osi wałów przez narzucenie więzów dodatkowych;
Sprzęgło dwucięgłowe jest obrotowo wrażliwe na zmianę wysuwności; zaburzenie wysuwności generuje zaburzenia ruchu obrotowego.
Sprzęgło trójcięgłowe jest obrotowo synchroniczne przy stałym kącie załamania osi wałów A i B;
Sprzęgło trójcięgłowe jest poprzecznie nierównobieżne;
Sprzęgło trójcięgłowe jest obrotowo wrażliwe na zmianę wysuwności; zaburzenie wysuwności generuje zaburzenia ruchu obrotowego.
Literatura źródłowa do p. 8.5.1 i 8.5.2.
[1] Madej J.: Mechanika napędu pojazdów szynowych... PWN Warszawa 1983.
224
Wyszukiwarka
Podobne podstrony:
ROZDZ 8U, PW SiMR, Inżynierskie, Semestr V, syf, laborki, Uklady napedowe, MTMT
ROZDZ 8C, PW SiMR, Inżynierskie, Semestr V, syf, laborki, Uklady napedowe, MTMT
ROZDZ 10B, PW SiMR, Inżynierskie, Semestr V, syf, laborki, Uklady napedowe, MTMT
ROZDZ 8E, PW SiMR, Inżynierskie, Semestr V, syf, laborki, Uklady napedowe, MTMT
ROZDZ 5A, PW SiMR, Inżynierskie, Semestr V, syf, laborki, Uklady napedowe, MTMT
ROZDZ 8G, PW SiMR, Inżynierskie, Semestr V, syf, laborki, Uklady napedowe, MTMT
ROZDZ 8O, PW SiMR, Inżynierskie, Semestr V, syf, laborki, Uklady napedowe, MTMT
ROZDZ 8A, PW SiMR, Inżynierskie, Semestr V, syf, laborki, Uklady napedowe, MTMT
ROZDZ 10A, PW SiMR, Inżynierskie, Semestr V, syf, laborki, Uklady napedowe, MTMT
ROZDZ 7A, PW SiMR, Inżynierskie, Semestr V, syf, laborki, Uklady napedowe, MTMT
ROZDZ 8P, PW SiMR, Inżynierskie, Semestr V, syf, laborki, Uklady napedowe, MTMT
ROZDZ 8T, PW SiMR, Inżynierskie, Semestr V, syf, laborki, Uklady napedowe, MTMT
COVER, PW SiMR, Inżynierskie, Semestr V, syf, laborki, Uklady napedowe, MTMT
TBL891, PW SiMR, Inżynierskie, Semestr V, syf, laborki, Uklady napedowe, MTMT
TBL871, PW SiMR, Inżynierskie, Semestr V, syf, laborki, Uklady napedowe, MTMT
TBL872, PW SiMR, Inżynierskie, Semestr V, syf, laborki, Uklady napedowe, MTMT
ACOVER, PW SiMR, Inżynierskie, Semestr V, syf, laborki, Uklady napedowe, TeoRuch
A-rys1-10, PW SiMR, Inżynierskie, Semestr V, syf, laborki, Uklady napedowe, TeoRuch
A-Rzdz3, PW SiMR, Inżynierskie, Semestr V, syf, laborki, Uklady napedowe, TeoRuch
więcej podobnych podstron