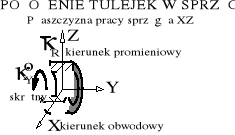
8.4. Sprzęgła odsuwne będące mechanizmami rzędu IV.
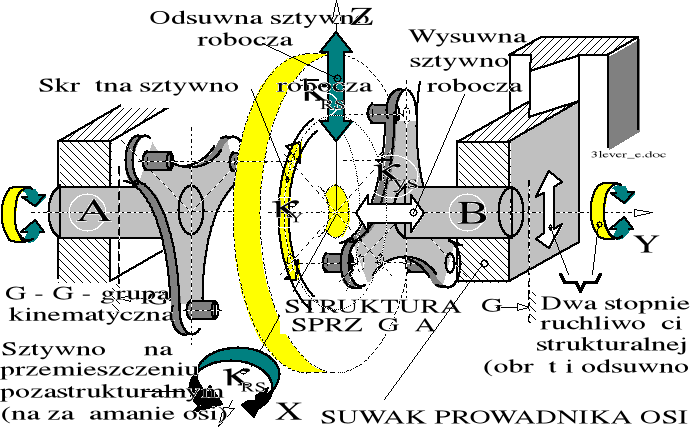
Rysunek 8.22. Schemat uogólnionego sprzęgła będącego mechanizmem rzędu czwartego.
Zgodnie z klasyczną teorią mechanizmów i maszyn rząd mechanizmu jest określony przez rząd jego grupy kinematycznej. W mechanizmie sprzęgła łożysko wału biernego B, traktowane formalnie jako para kinematyczna, należy do struktury grupy kinematycznej mechanizmu. Z powyższych względów, w mechanizmie rzędu czwartego, liczba czopów aktywnych wału A, będących formalnie obrotowymi parami kinematycznymi klasy piątej, wynosi 3.
W niniejszym podrozdziale będziemy omawiać sprzęgła rzędu czwartego będące mechanizmami klasycznymi oraz nieklasycznymi. Mechanizmy klasyczne będą zawierać wyłącznie człony i pary kinematyczne nieodkształcalne, wyidealizowane. Grupa kinematyczna płaskiego mechanizmu klasycznego, jak wiadomo, ma zerowy stopień ruchliwości. W przypadku występowania par kinematycznych odkształcalnych kinematyka trakcyjna takich mechanizmów będzie w głównej mierze określona przez ich strukturę wyidealizowaną. Formalnie traktowana grupa kinematyczna mechanizmów nieklasycznych będzie miała jeden stopień ruchliwości. Zatem mechanizmy nieklasyczne będą musiały zawierać conajmniej jedną parę kinematyczną z więzem sprężystym, dzięki któremu mechanizm będzie mógł zachować właściwą postać konstrukcyjną, w granicach dopuszczalnych obciążeń roboczych, bez utraty postaci konstrukcyjnej.
Poniżej, w skrócie, zostanie przedstawiona kinematyka i sztywności sprzęgieł rzędu IV według [1], [2], [3]. Badanie sprzęgieł rzędu IV jest bardziej złożone niż w przypadku rzędu III. Szczegóły zamieszczono w pracach [3], [4], [5] i [6].
Tabela 8.5
L.p |
SCHEMAT GRUPY KINEMATYCZNEJ rząd, klasa |
SCHEMAT KONSTRUKCYJNY SPRZĘGŁA |
LICZBA S |
1 |
|
|
0 |
2 |
|
|
0 |
3 |
|
|
1 |
4 |
|
|
1 |
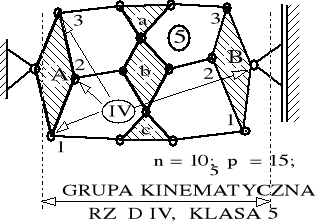
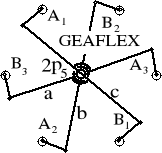
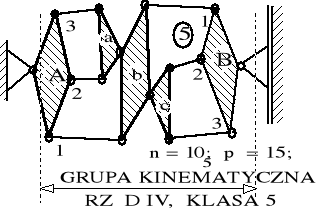
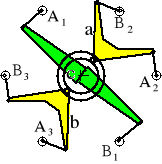
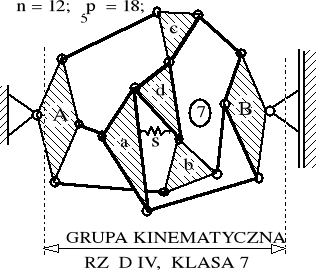
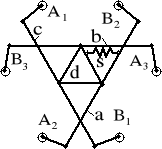
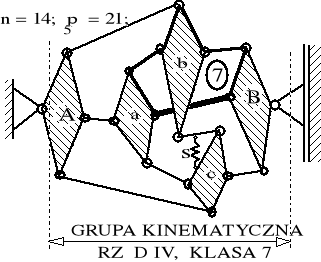
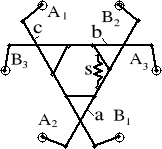
TABELA 8.6, POZ. 1
ODSUWNE SPRZĘGŁA BĘDĄCE MECHANIZMAMI RZĘDU 4
SPRZĘGŁO LOKOMOTYW DB 182001
W tabeli 8.5. poz. 1; PATENT GEAFLEX
KINEMATYKA SPRZĘGŁA
Sprzęgło równobieżne. - kąt obrotu wału A; - kąt obrotu wału B;
TABELA 8.6, POZ 1. c.d.
ODSUWNE SPRZĘGŁA BĘDĄCE MECHANIZMAMI RZĘDU 4
SPRZĘGŁO LOKOMOTYW DB 182001
W tabeli 8.5. poz. 1; PATENT GEAFLEX
SZTYWNOŚCI SPRZĘGŁA GEAFLEX:
![]()
- Sztywność sprzęgła (promieniowa) na przemieszczeniu odsuwnym,
![]()
- Robocza sztywność skrętna sprzęgła.
W punktach "A", "B", "D" i "F" - jednakowe tulejki z indeksem "A" sztywności kierunkowych; W węźle centralnym "O", tulejki z indeksem "O".
Wariant wykonawczy I:
Wariant wykonawczy II:
Wariant wykonawczy III:
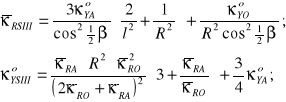
TABELA 8.6, POZ 3.
ODSUWNE SPRZĘGŁA BĘDĄCE MECHANIZMAMI RZĘDU 4
TRÓJDŹWIGNIOWE SPRZĘGŁO JARZMOWE
W tabeli 8.5. poz. 3; PATENT Nr.136145 OBRPS Poznań, 1987
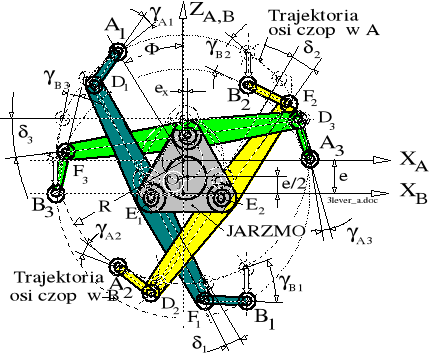
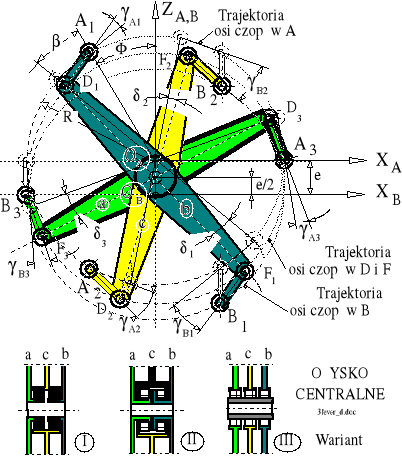
SCHEMAT SPRZĘGŁA PODCZAS PRACY Z NARZUCONĄ ODSUWNOŚCIĄ "e";
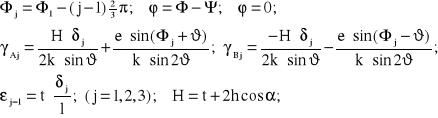
KINEMATYKA SPRZĘGŁA
Sprzęgło równobieżne gdy e<<R;
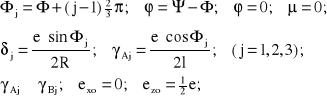
- kąt obrotu wału A;
- kąt obrotu wału B;
Środek masy sprzęgła znajduje się w punkcie OJ.
- kąt obrotu jarzma w statecznych warunkach odsuwnej pracy sprzęgła
TABELA 8.6, POZ 2 c.d.
ODSUWNE SPRZĘGŁA BĘDĄCE MECHANIZMAMI RZĘDU 4
TRÓJDŹWIGNIOWE SPRZĘGŁO JARZMOWE
W tabeli 8.5 poz. 3; PATENT Nr.136145 OBRPS Poznań, 1987
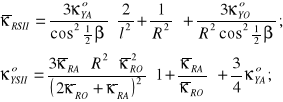
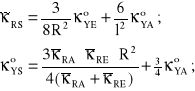
SZTYWNOŚCI SPRZĘGŁA:
![]()
- Sztywność sprzęgła (promieniowa) na przemieszczeniu odsuwnym,
![]()
- Robocza sztywność skrętna sprzęgła.
W punktach "A", "B", "D" i "F" - jednakowe tulejki z indeksem "A" sztywności kierunkowych; W węzłach "E" , jednakowe tulejki z indeksem "E".
|
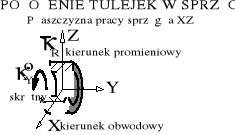
STATECZNOŚĆ POSTACI KONSTRUKCYJNEJ SPRZĘGŁA: kierunki destabilizacji postaci konstrukcyjnej.
Warunek zachowania stateczności:
|
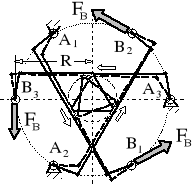
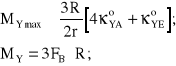
TABELA 8.6. POZ 3.
ODSUWNE SPRZĘGŁA BĘDĄCE MECHANIZMAMI RZĘDU 4
TRÓJDŹWIGNIOWE SPRZĘGŁO BEZJARZMOWE
W tabeli 8.5. poz. 4; PATENT Nr.155210; Politechnika Warszawska, 1992
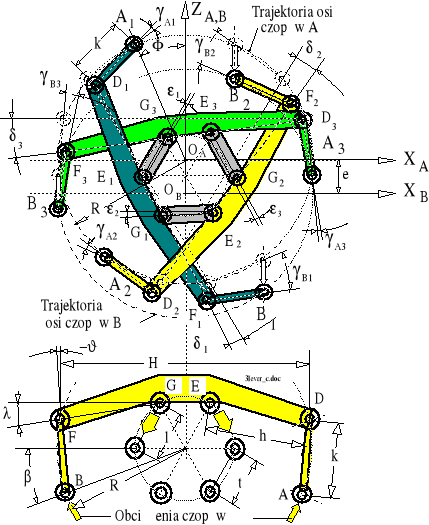
SCHEMAT SPRZĘGŁA PODCZAS PRACY Z NARZUCONĄ ODSUWNOŚCIĄ "e";
TABELA 8.6. POZ 3. c.d.
ODSUWNE SPRZĘGŁA BĘDĄCE MECHANIZMAMI RZĘDU 4
TRÓJDŹWIGNIOWE SPRZĘGŁO BEZJARZMOWE
W tabeli 8.5. poz. 4; PATENT Nr.155210 Politechnika Warszawska 1992
KINEMATYKA SPRZĘGŁA
Sprzęgło równobieżne gdy e << R;
- kąt obrotu wału A; - kąt obrotu wału B;
Sprzęgło nie ma jarzma; nie ma też rzeczywistego punktu środka masy.
gdy = 0, to: ![]()
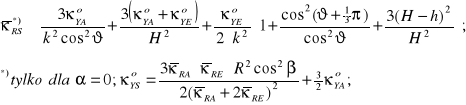
OZNACZENIA SZTYWNOŚCI KOMPLETNEGO SPRZĘGŁA:
![]()
- Sztywność sprzęgła (promieniowa) na przemieszczeniu odsuwnym,
![]()
- Robocza sztywność skrętna sprzęgła,
![]()
- Sztywność sprzęgła (poosiowa) na przemieszczeniu wysuwnym,
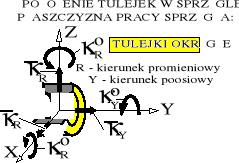
W punktach "A", "B", "D" i "F" - jednakowe tulejki z indeksem "A" sztywności kierunkowych; W węzłach "E" i "G", jednakowe tulejki z indeksem "E".
TABELA 8.6. POZ 3. c.d.
ODSUWNE SPRZĘGŁA BĘDĄCE MECHANIZMAMI RZĘDU 4
TRÓJDŹWIGNIOWE SPRZĘGŁO BEZJARZMOWE
W tabeli 2 poz. 4; PATENT Nr.155210 Politechnika Warszawska 1992
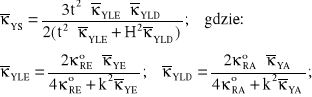
WZORY OPISUJĄCE SZTYWNOŚCI KOMPLETNEGO SPRZĘGŁA:
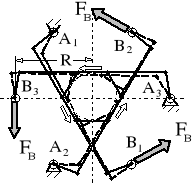
STATECZNOŚĆ POSTACI KONSTRUKCYJNEJ SPRZĘGŁA:
Utrata stateczności postaci konstrukcyjnej sprzęgła (według poniższego szkicu) może wystąpić, gdy jest przekroczone obciążenie graniczne czopów. Warunek (energetyczny) zachowania stateczności postaci konstrukcyjnej jest następujący:

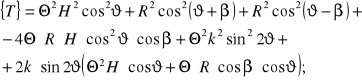
|
gdzie:
|
Literatura źródłowa do podrozdziału 8.3.3.
[1]. J. Madej, J. Żałopa: Równobieżne sprzęgło napędu osi zestawu kołowego pojazdu szynowego. Patent B 61F 3/00 Nr 136145 z dn. 31 III 1987.
[2]. J. Madej, J. Żałopa: Równobieżne sprzęgło dźwigniowo - cięgłowe napędu kół pojazdu szynowego. Patent B 61F 3/00 Nr. 136144 z dn. 31 III 1987.
[3]. J. Madej, Z. Tomczyński: Równobieżne odsuwno - wychylne sprzęgło trójdźwigniowe zwłaszcza do napędu osi pojazdu szynowego. Patent Nr.155210 z dnia 9 IX 1992.
[4]. Madej J.: Nowe mechanizmy równobieżnych bezjarzmowych odsuwnych sprzęgieł rzędu IV do transmisji momentu napędowego lokomotyw. Konferencja specjalistyczna IPPW-COBiRTK Warszawa, 1884.
[5]. Madej J.: Nowe równobieżne odsuwne sprzęgło trzydźwigniowe zespołu napędowego lokomotywy i jego własności techniczne. Konferencja specjalistyczna IPPW-COBiRTK Warszawa, 1884.
[6] Madej J.: Projektowanie mechanizmów napędowych pojazdów szynowych WKiŁ Warszawa, 1988.
212
Wyszukiwarka
Podobne podstrony:
ROZDZ 8U, PW SiMR, Inżynierskie, Semestr V, syf, laborki, Uklady napedowe, MTMT
ROZDZ 8K, PW SiMR, Inżynierskie, Semestr V, syf, laborki, Uklady napedowe, MTMT
ROZDZ 8C, PW SiMR, Inżynierskie, Semestr V, syf, laborki, Uklady napedowe, MTMT
ROZDZ 10B, PW SiMR, Inżynierskie, Semestr V, syf, laborki, Uklady napedowe, MTMT
ROZDZ 8E, PW SiMR, Inżynierskie, Semestr V, syf, laborki, Uklady napedowe, MTMT
ROZDZ 5A, PW SiMR, Inżynierskie, Semestr V, syf, laborki, Uklady napedowe, MTMT
ROZDZ 8O, PW SiMR, Inżynierskie, Semestr V, syf, laborki, Uklady napedowe, MTMT
ROZDZ 8A, PW SiMR, Inżynierskie, Semestr V, syf, laborki, Uklady napedowe, MTMT
ROZDZ 10A, PW SiMR, Inżynierskie, Semestr V, syf, laborki, Uklady napedowe, MTMT
ROZDZ 7A, PW SiMR, Inżynierskie, Semestr V, syf, laborki, Uklady napedowe, MTMT
ROZDZ 8P, PW SiMR, Inżynierskie, Semestr V, syf, laborki, Uklady napedowe, MTMT
ROZDZ 8T, PW SiMR, Inżynierskie, Semestr V, syf, laborki, Uklady napedowe, MTMT
COVER, PW SiMR, Inżynierskie, Semestr V, syf, laborki, Uklady napedowe, MTMT
TBL891, PW SiMR, Inżynierskie, Semestr V, syf, laborki, Uklady napedowe, MTMT
TBL871, PW SiMR, Inżynierskie, Semestr V, syf, laborki, Uklady napedowe, MTMT
TBL872, PW SiMR, Inżynierskie, Semestr V, syf, laborki, Uklady napedowe, MTMT
ACOVER, PW SiMR, Inżynierskie, Semestr V, syf, laborki, Uklady napedowe, TeoRuch
A-rys1-10, PW SiMR, Inżynierskie, Semestr V, syf, laborki, Uklady napedowe, TeoRuch
A-Rzdz3, PW SiMR, Inżynierskie, Semestr V, syf, laborki, Uklady napedowe, TeoRuch
więcej podobnych podstron