Katedra Mechaniki, Robotów 24.II.1999
i Maszyn Roboczych Ciężkich
Politechniki Śląskiej
Zespół Mechaniki i Mechanicznej
Teorii Maszyn
Ćwiczenie nr 1
Temat: WYZNACZANIE PRĘDKOŚCI I PRZYSPIESZEŃ PUNKTU MECHANIZMU METODĄ TORU OCECHOWANEGO
Prowadzący ćwiczenia: mgr inż. J. Margielewicz
Sprawozdanie zawiera:
Cel ćwiczenia.
Krótki opis metody.
Postać konstrukcyjna mechanizmu.
Wykres toru ocechowanego.
Hodograf wektora prędkości i wektora przyspieszeń.
Wyniki pomiarów.
Wnioski.
Szymik Tadeusz
Wydział MT
Semestr IV Grupa I
Podgrupa I
1.Cel ćwiczenia.
Celem ćwiczenia jest zapoznanie się z wyznaczaniem prędkości i przyspieszeń wskazanego punktu mechanizmu płaskiego metodą toru ocechowanego.
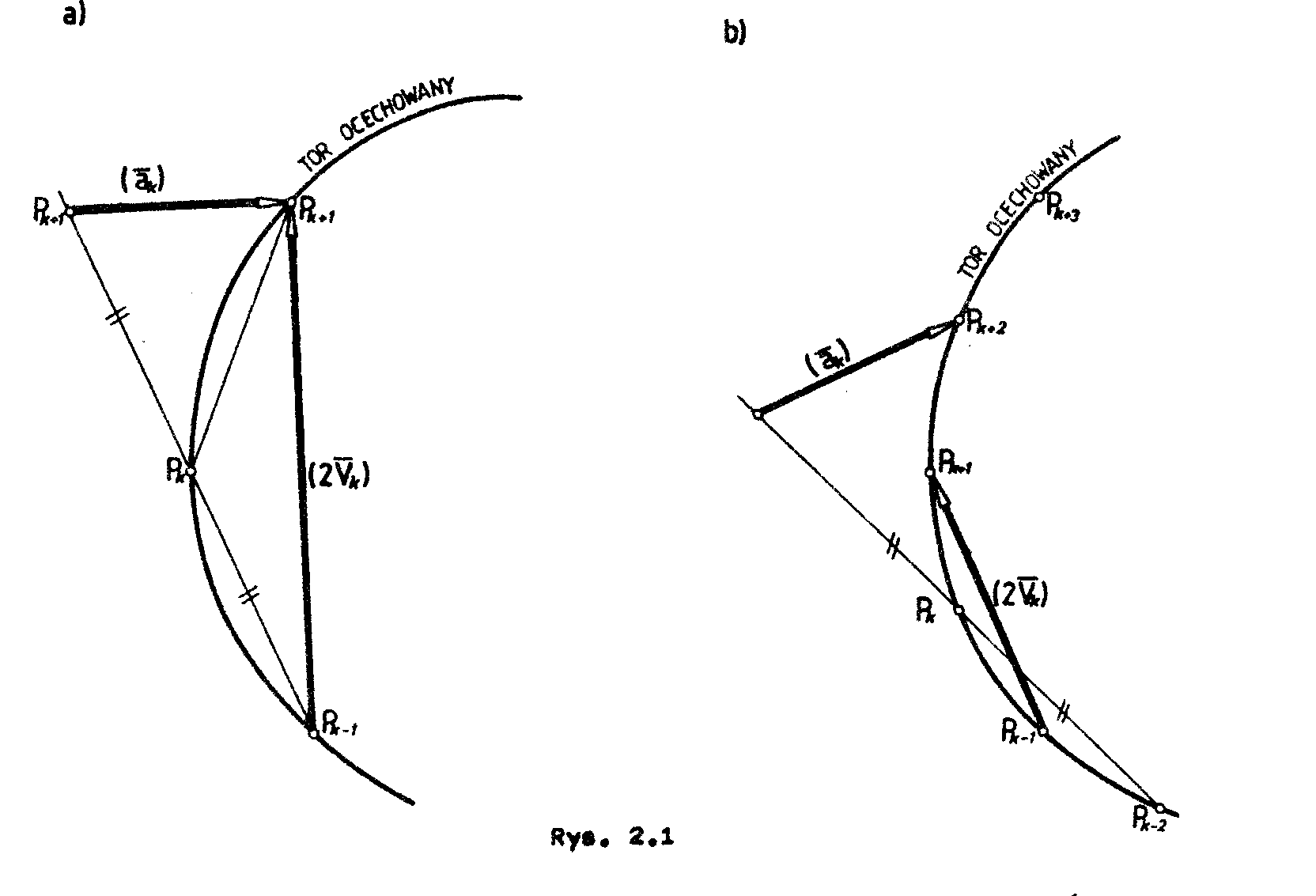
2.Krótki opis metody.
W metodzie tej posługujemy się torem ocechowanym i wykorzystujemy fakt że: podwójny wektor prędkości(2Vk) punktu Pk jest sumą wektorową dwóch sąsiednich boków utworzonego z cięciw toru ocechowanego, natomiast wektor przyspieszenia āk tego punktu, jest równy ich różnicy(rys. a. W praktyce przy wyznaczaniu prędkości celowe jest przyjmowanie dwa razy gęstszego podziału niż przy obliczaniu przyspieszeń(rys. b).
3.Postać konstrukcyjna mechanizmu I.
1-korba
2-łącznik
3-ołówek
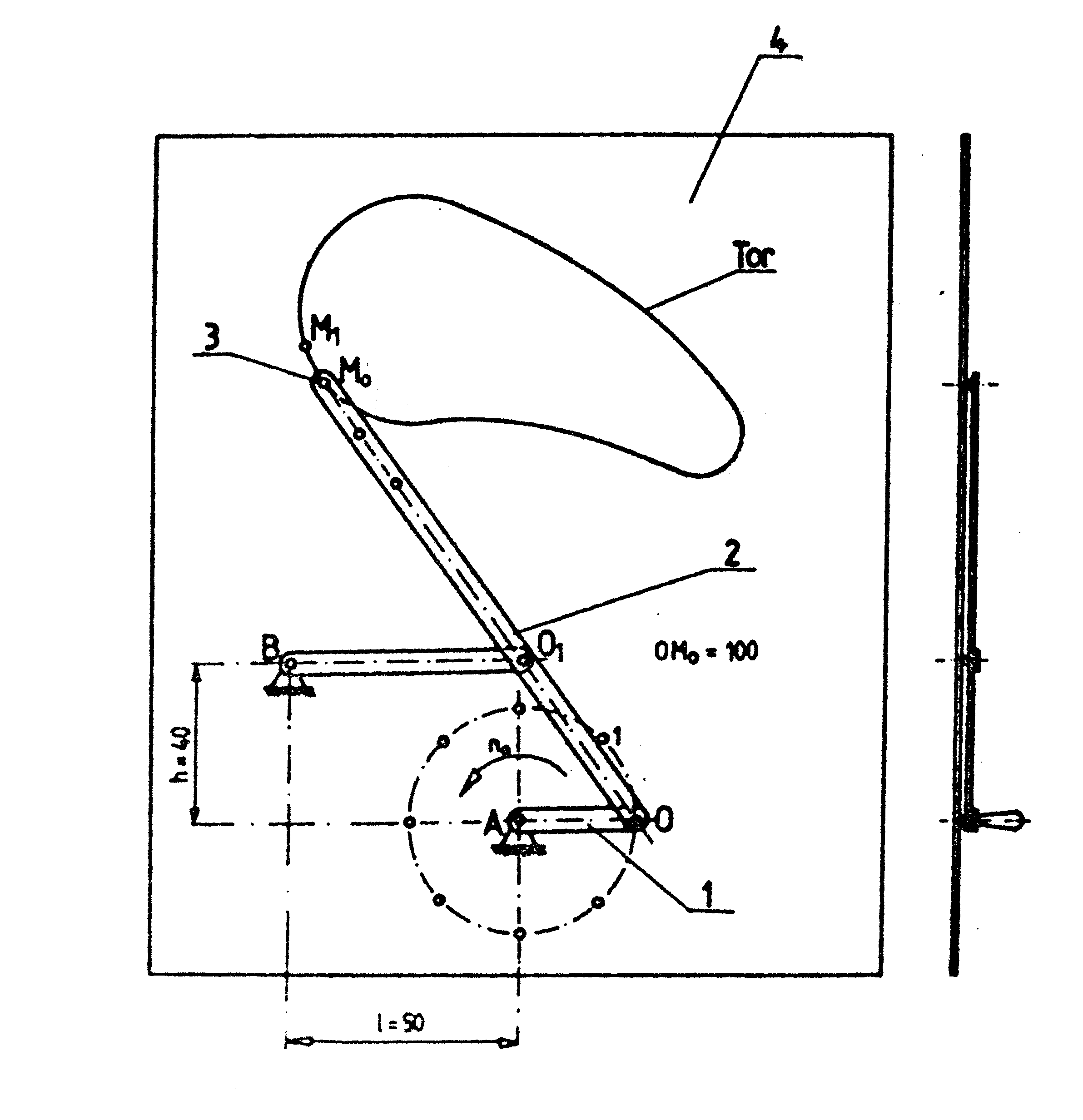
4-płyta
6.Wyniki pomiarów.
Rysunek I z urządzenia I
Lp. |
ϕ1k[°] |
(2Vk) [cm] |
Vk [cm/s] |
(ak) [cm] |
ak [cm/s2] |
mv =21 |
0 |
17,143 |
3,2 |
28 |
|
|
ℋ1=1 |
1 |
32,286 |
3,7 |
32,4 |
1,4 |
107,2 |
ℋv =8,75 |
2 |
51,429 |
4,0 |
35 |
|
|
ℋa =76,6 |
3 |
68,572 |
3,9 |
34,12 |
0,7 |
54 |
N0=50 |
4 |
85,715 |
3,4 |
29,75 |
|
|
[obr/min] |
5 |
102,86 |
2,5 |
22 |
2,7 |
207 |
|
6 |
120 |
2,1 |
18,4 |
|
|
|
7 |
137,14 |
2,2 |
19,25 |
5,5 |
421,1 |
|
8 |
154,28 |
5,9 |
52 |
|
|
|
9 |
171,43 |
7,2 |
63 |
2,7 |
207 |
|
10 |
188,57 |
6,6 |
57,75 |
|
|
|
11 |
205,72 |
5,7 |
50 |
3,3 |
253 |
|
12 |
222,86 |
4,7 |
41,12 |
|
|
|
13 |
240 |
3,2 |
28 |
4,1 |
314 |
|
14 |
257,14 |
2,7 |
24 |
|
|
|
15 |
274,3 |
2,8 |
24,5 |
1,8 |
138 |
|
16 |
291,43 |
3,0 |
26,25 |
|
|
|
17 |
308,6 |
3,0 |
26,25 |
0,7 |
54 |
|
18 |
325,72 |
2,8 |
24,5 |
|
|
|
19 |
342,9 |
2,5 |
22 |
1,5 |
115 |
|
20 |
360 |
2,4 |
21 |
|
|
|
21 |
377,15 |
2,6 |
22,75 |
1,7 |
130,2 |
|
Rysunek II z urządzenia I
Lp. |
ϕ1k[°] |
(2Vk) [cm] |
Vk [cm/s] |
(ak) [cm] |
ak [cm/s2] |
Mv =21 |
0 |
17,143 |
38 |
33,25 |
|
|
ℋ1=1 |
1 |
32,286 |
38 |
33,25 |
0,7 |
53,6 |
ℋv =8,75 |
2 |
51,429 |
40 |
35 |
|
|
ℋa =76,6 |
3 |
68,572 |
38 |
33,25 |
0,7 |
53,6 |
N0=50 |
4 |
85,715 |
33 |
29 |
|
|
[obr/min] |
5 |
102,86 |
25 |
22 |
2,7 |
206,7 |
|
6 |
120 |
18 |
15,75 |
|
|
|
7 |
137,14 |
31 |
27,12 |
5,1 |
390,5 |
|
8 |
154,28 |
54 |
47,25 |
|
|
|
9 |
171,43 |
67 |
59 |
2,7 |
206,7 |
|
10 |
188,57 |
63 |
55,12 |
|
|
|
11 |
205,72 |
57 |
50 |
3,2 |
245 |
|
12 |
222,86 |
45 |
39,4 |
|
|
|
13 |
240 |
32 |
28 |
3,8 |
291 |
|
14 |
257,14 |
25 |
22 |
|
|
|
15 |
274,3 |
25 |
22 |
1,7 |
130,25 |
|
16 |
291,43 |
27 |
24 |
|
|
|
17 |
308,6 |
27 |
24 |
0,8 |
61,25 |
|
18 |
325,72 |
24 |
21 |
|
|
|
19 |
342,9 |
22 |
19,25 |
1,5 |
114,8 |
|
20 |
360 |
22 |
19,25 |
|
|
|
21 |
377,15 |
27 |
24 |
1,5 |
114,8 |
|
Rysunek I z urządzenia II
Lp. |
ϕ1k[°] |
(2Vk) [cm] |
Vk [cm/s] |
(ak) [cm] |
ak [cm/s2] |
mv =16 |
0 |
22,5 |
48 |
32 |
|
|
ℋ1=1 |
1 |
45 |
56 |
37,3 |
0,5 |
22,22 |
ℋv =6,66 |
2 |
67,5 |
50 |
33,3 |
|
|
ℋa =44,44 |
3 |
90 |
38 |
25,3 |
3,9 |
173,32 |
N0=50 |
4 |
112,5 |
30 |
20 |
|
|
[obr/min] |
5 |
135 |
50 |
33,3 |
9,9 |
440 |
|
6 |
157,5 |
95 |
63,3 |
|
|
|
7 |
180 |
109 |
72,6 |
5,8 |
258 |
|
8 |
202,5 |
61 |
40,6 |
|
|
|
9 |
225 |
17 |
11,3 |
7,3 |
324,4 |
|
10 |
247,5 |
23 |
15,3 |
|
|
|
11 |
270 |
31 |
20,6 |
1,2 |
53,33 |
|
12 |
297,5 |
34 |
22,6 |
|
|
|
13 |
315 |
34 |
22,6 |
1,4 |
62,22 |
|
14 |
337,5 |
33 |
22 |
|
|
|
15 |
360 |
25 |
16,6 |
5,6 |
250 |
|
16 |
382,5 |
20 |
13,3 |
|
|
|
7.Wnioski.
O wielkości błędów przy wyznaczaniu prędkości i przyspieszeń decydują głównie niedokładności podczas wyznaczania położeń punktów na torze ocechowanym i przyjęta liczba przedziałów m.v.
Wyszukiwarka
Podobne podstrony:
Mechanizm strugarki, Księgozbiór, Studia, Maszynoznastwo i Automatyka
Tensor bezwladnosci, Księgozbiór, Studia, Maszynoznastwo i Automatyka
Regulacja trojpolozeniowa, Księgozbiór, Studia, Maszynoznastwo i Automatyka
Regulacja dwupolozeniowa, Księgozbiór, Studia, Maszynoznastwo i Automatyka
Analiza komputerowa mech tloko, Księgozbiór, Studia, Maszynoznastwo i Automatyka
Analiza strukturalna mechanizmow, Księgozbiór, Studia, Maszynoznastwo i Automatyka
Przekazniki, Księgozbiór, Studia, Maszynoznastwo i Automatyka
Przekazniki trojpolozeniowe, Księgozbiór, Studia, Maszynoznastwo i Automatyka
Mechanizm strugarki, Księgozbiór, Studia, Maszynoznastwo i Automatyka
Metoda Rungego-Kutty, Księgozbiór, Studia, Mechnika Doświadczalna, Zwykła
metoda Bragga, Księgozbiór, Studia, Fizyka
Metoda Angstoma, Księgozbiór, Studia, Fizyka
Maszyny do obrobki plastycznej, Księgozbiór, Studia, LOOS
Ladunek wlasciwy-metoda magnetronowa, Księgozbiór, Studia, Fizyka
Maszyny technologiczne sterowane numerycznie, Księgozbiór, Studia, LOOS
Sciaga maszynoznastwo wyklad, Księgozbiór, Studia, LOOS
Maszyny energetyczne, Księgozbiór, Studia, LOOS
Metoda Angstroema, Księgozbiór, Studia, Fizyka
więcej podobnych podstron