RADOM WYDZ. TRANSPORT |
LABORATORIUM AUTOMATYKI |
Data:
|
|
ROBERT ADAMCZAK TOMASZ MISIEWICZ MARCIN PUDZIANOWSKI ROBERT MRÓZ |
GRUPA 34,A' |
ZESPÓŁ |
Rok akademicki: 1998/99 |
Ćwiczenie nr: |
TEMAT: Ch -ki częstotliwościowe i czasowe liniowych członów regulacji automatycznej.
|
Ocena: |
|
Cel ćwiczenia:
Zapoznanie z podstawowymi członami automatyki modelowanymi na czwórnikach biernych oraz ich charakterystykami częstotliwościowymi i czasowymi.
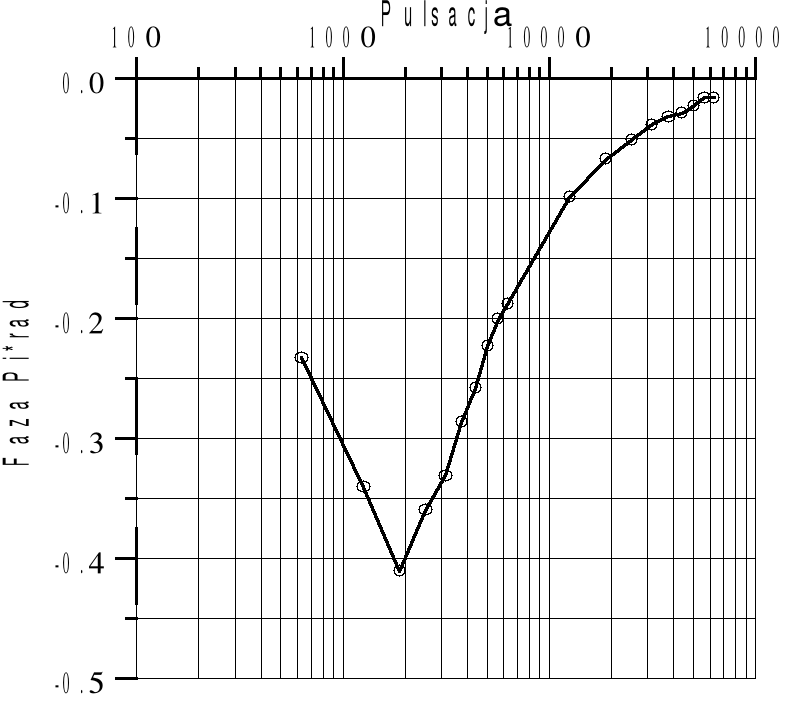
Badane elementy:
Wszystkie czwórniki zasilane były z generatora przebiegu sinusoidalnego. Obserwowaliśmy na oscyloskopie w trybie XY zachowanie układu, otrzymując elipsy o parametrach A, B, C, które notowaliśmy.
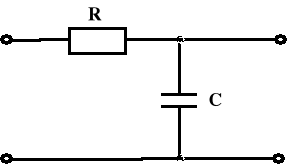
1.Układ całkujący :
R=20 kΩ, C=10 nF
Stała czasowa wynosi :
T = R C
T = 2 *10 4 *10*10 -9 = 0,2 ms
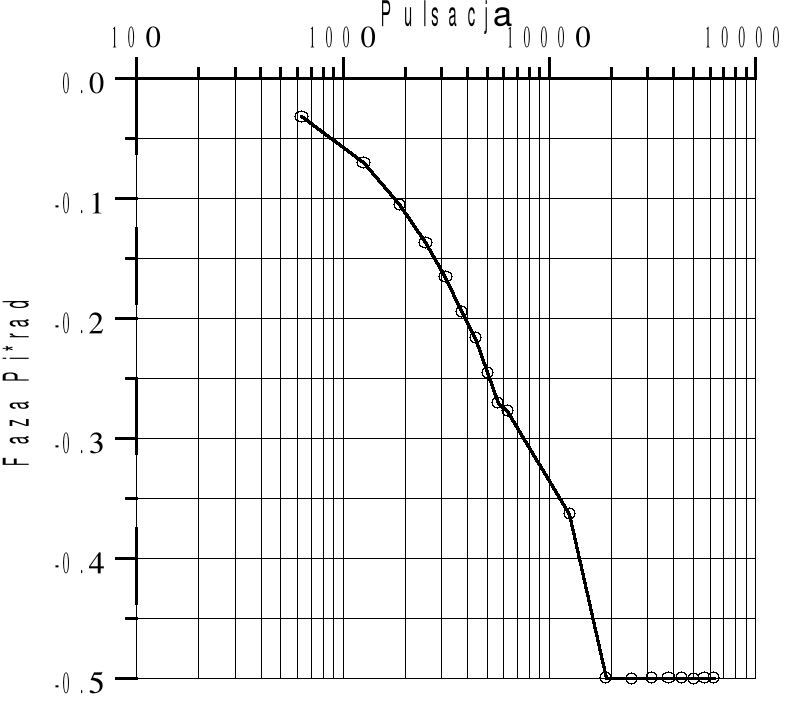
Z wykresu odczytujemy s dla której = -∏/4= - 45o
s = 5000 rad/s
Stała czasowa na podstawie charakterystyki wynosi :
T =1 / s
T = 1/5000 =0,2 ms
Wzmocnienie k wynosi :
k = 1
Tabela pomiarowa nr 1.
f |
ω |
A |
B |
C |
M(ω) |
L(ω) |
ϕ(ω) |
Hz |
rad/s |
dz |
dz |
dz |
|
dB |
rad |
100 |
628 |
6.3 |
6.1 |
0.6 |
0.97 |
-0.26 |
0.10 |
200 |
1257 |
6.5 |
6.0 |
1.3 |
0.92 |
-0.72 |
0.22 |
300 |
1885 |
6.4 |
5.8 |
1.9 |
0.91 |
-0.82 |
0.33 |
400 |
2513 |
6.5 |
5.5 |
2.3 |
0.85 |
-1.41 |
0.43 |
500 |
3142 |
6.5 |
5.2 |
2.6 |
0.80 |
-1.94 |
0.52 |
600 |
3770 |
6.5 |
4.9 |
2.8 |
0.75 |
-2.50 |
0.61 |
700 |
4398 |
6.5 |
4.6 |
2.9 |
0.71 |
-2.97 |
0.68 |
800 |
5027 |
6.5 |
4.3 |
3.0 |
0.66 |
-3.61 |
0.77 |
900 |
5655 |
6.5 |
4.0 |
3.0 |
0.62 |
-4.15 |
0.85 |
1000 |
6283 |
6.4 |
3.8 |
2.9 |
0.59 |
-4.58 |
0.87 |
2000 |
12566 |
6.4 |
2.2 |
2.0 |
0.34 |
-9.37 |
1.14 |
3000 |
18850 |
6.4 |
1.5 |
1.5 |
0.23 |
-12.77 |
1.57 |
4000 |
25133 |
6.4 |
1.2 |
1.1 |
0.19 |
-14.42 |
1.16 |
5000 |
31416 |
6.4 |
1.0 |
1.0 |
0.16 |
-15.92 |
1.57 |
6000 |
37699 |
6.4 |
0.8 |
0.8 |
0.13 |
-17.72 |
1.57 |
7000 |
43982 |
6.4 |
0.7 |
0.7 |
0.11 |
-19.17 |
1.57 |
8000 |
50265 |
6.4 |
0.7 |
0.6 |
0.11 |
-19.17 |
1.03 |
9000 |
56549 |
6.4 |
0.6 |
0.6 |
0.09 |
-20.92 |
1.57 |
10000 |
62832 |
6.4 |
0.5 |
0.5 |
0.08 |
-21.94 |
1.57 |
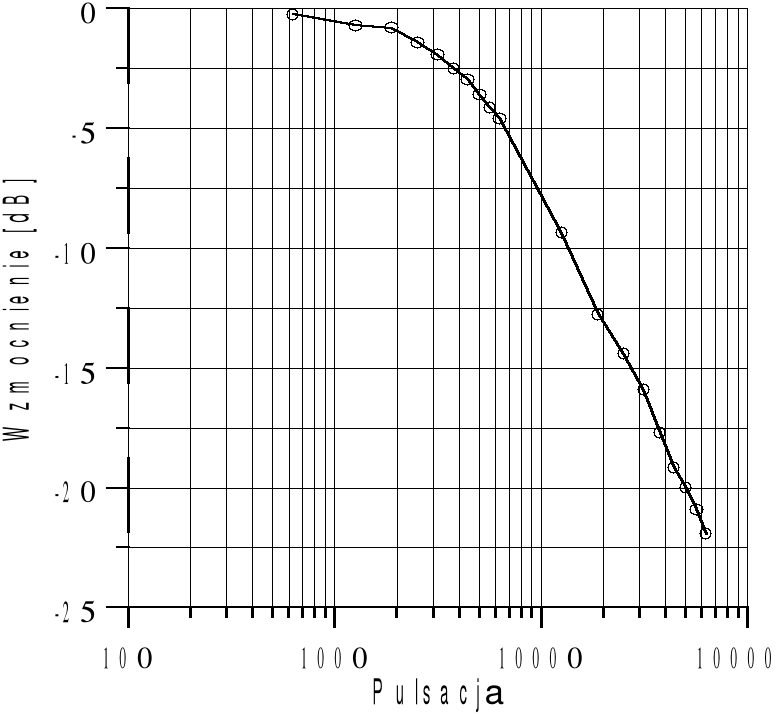
Charakterystyki dla członu całkującego RC.
a).Funkcja L(ω)=f(ω)
b).Funkcja ϕ=f(ω)
2.Układ różniczkujący:
R=20 kΩ, C=10 nF
Stała czasowa wynosi:
T = R C
T = 2 *10 4 *10*10 -9 = 0,2 ms
Z wykresu odczytujemy s dla której = ∏/4= 45o
s = 4800 rad/s
Stała czasowa na podstawie charakterystyki wynosi :
T =1 / s
T = 1/4800 =0,21 ms
Wzmocnienie k wynosi :
k = 1
Tabela pomiarowa nr 2.
f |
ω |
A |
B |
C |
M(ω) |
L(ω) |
ϕ(ω) |
Hz |
rad/s |
dz |
dz |
dz |
|
dB |
rad |
100 |
628 |
6.5 |
0.7 |
0.7 |
0.11 |
-19.17 |
1.57 |
200 |
1257 |
6.5 |
1.4 |
1.3 |
0.22 |
-13.15 |
1.19 |
300 |
1885 |
6.5 |
2.1 |
1.9 |
0.32 |
-9.90 |
1.13 |
400 |
2513 |
6.5 |
2.6 |
2.4 |
0.40 |
-7.96 |
1.18 |
500 |
3142 |
6.5 |
3.2 |
2.6 |
0.49 |
-6.20 |
0.95 |
600 |
3770 |
6.5 |
3.6 |
2.9 |
0.55 |
-5.19 |
0.94 |
700 |
4398 |
6.5 |
4.0 |
3.0 |
0.62 |
-4.15 |
0.85 |
800 |
5027 |
6.5 |
4.3 |
2.9 |
0.66 |
-3.61 |
0.74 |
900 |
5655 |
6.5 |
4.5 |
2.9 |
0.69 |
-3.22 |
0.70 |
1000 |
6283 |
6.5 |
4.8 |
2.9 |
0.74 |
-2.62 |
0.65 |
2000 |
12566 |
6.5 |
5.7 |
2.0 |
0.88 |
-1.11 |
0.36 |
3000 |
18850 |
6.5 |
6.0 |
1.5 |
0.92 |
-0.72 |
0.25 |
4000 |
25133 |
6.5 |
6.0 |
1.2 |
0.92 |
-0.72 |
0.20 |
5000 |
31416 |
6.5 |
6.1 |
1.0 |
0.94 |
-0.54 |
0.16 |
6000 |
37699 |
6.5 |
6.1 |
0.9 |
0.94 |
-0.54 |
0.15 |
7000 |
43982 |
6.5 |
6.1 |
0.8 |
0.94 |
-0.54 |
0.13 |
8000 |
50265 |
6.5 |
6.1 |
0.6 |
0.94 |
-0.54 |
0.10 |
9000 |
56549 |
6.5 |
6.2 |
0.6 |
0.95 |
-0.45 |
0.10 |
10000 |
62832 |
6.5 |
6.2 |
0.6 |
0.95 |
-0.45 |
0.10 |
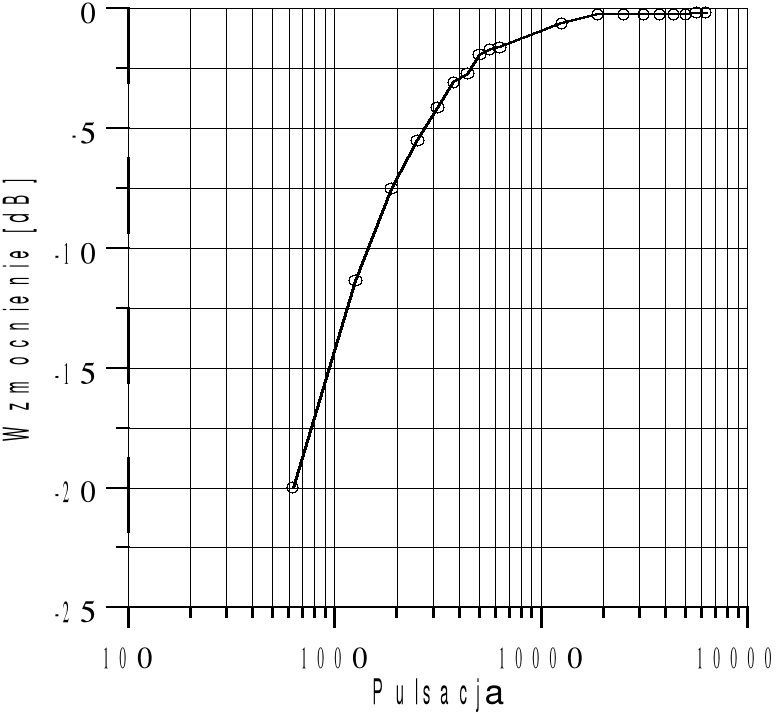
Charakterystyki dla członu różniczkującego RC.
a).Funkcja L(ω)=f(ω)
b).Funkcja ϕ=f(ω)
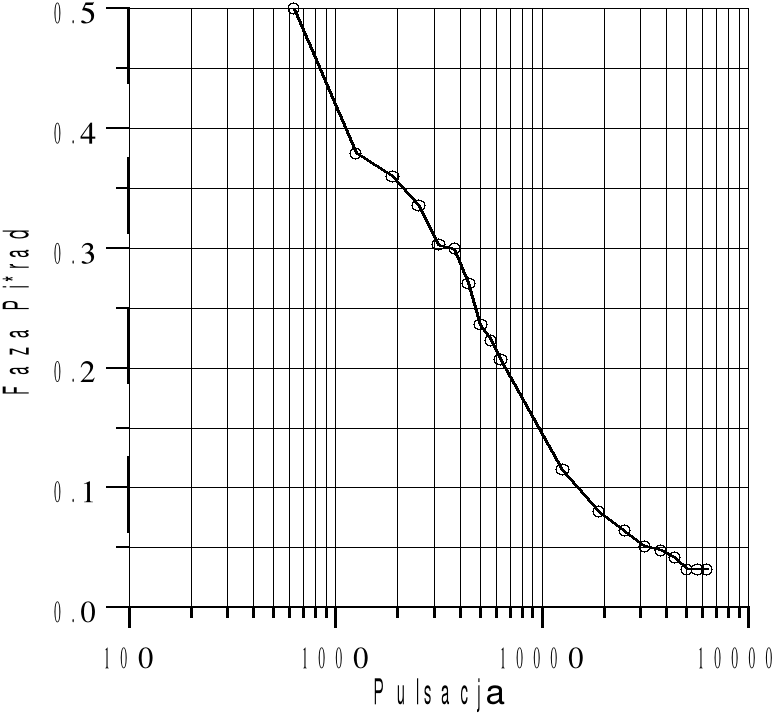
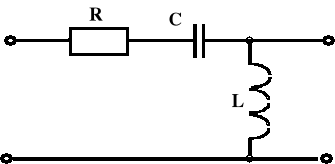
3.Układ oscylacyjny:
R=2 kΩ, C=500 nF, L=0,5H
Z wykresu odczytujemy :
=2000 rad/s
Z wykresu L = f ( ) odczytujemy :
L2 0
Maksymalna wartość modułu transmitancji widmowej wynosi :
Mp = 10 0,05L4
Mp = 10 0,05*10 = 10 0,5 =3,16
Wzmocnienie k wynosi:
k = 10 0 = 1
Pulsacja wynosi :
=
= =2000rad/s
Charakterystyki dla członu oscylacyjnego RLC.
a).Funkcja L(ω)=f(ω)
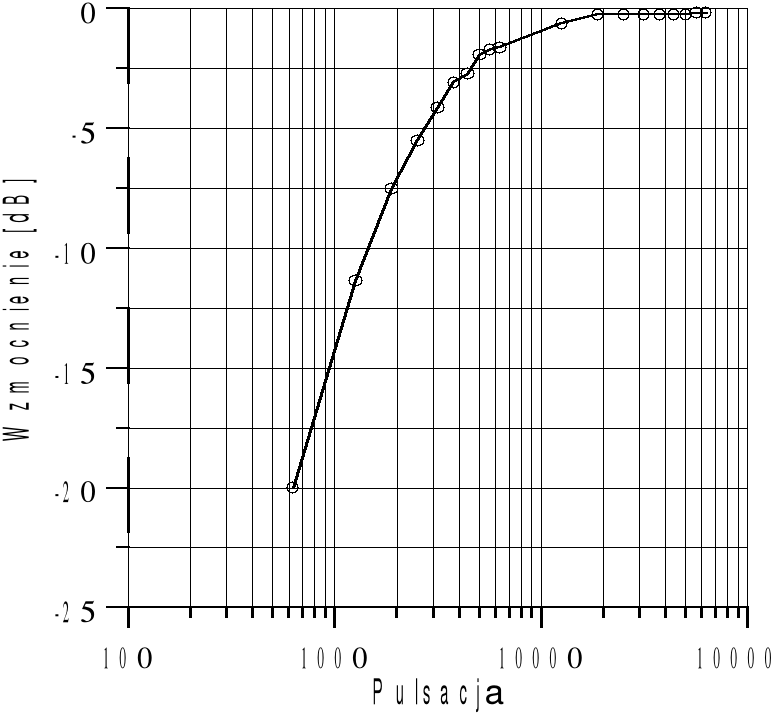
b).Funkcja ϕ=f(ω)
Mając wartości elementów R L C członu oscylacyjnego, współczynnik tłumienia można obliczyć ze wzoru :
= 1
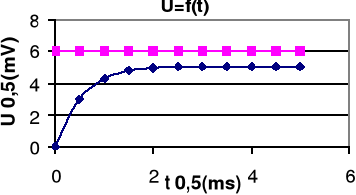
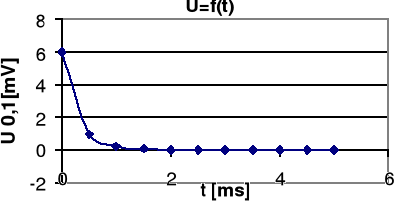
4.Charakterystyki czasowe układów RC.
a).Układ całkujący
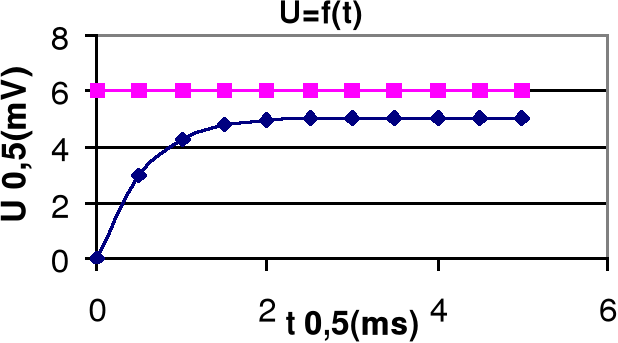
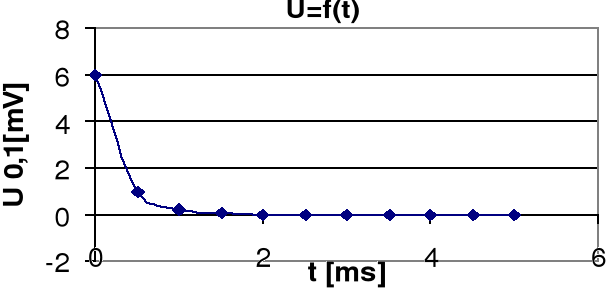
b). Układ różniczkujący.
Wnioski:
Przeprowadzone ćwiczenie umożliwiło nam wykreślenie charakterystyk amplitudowych i fazowych. Zauważamy, że dla członów inercyjnych w miarę wzrostu częstotliwości amplituda sygnału na wyjściu maleje. Widać przy tym dosyć wyraźne przegięcia charakterystyk. Na podstawie punktu, w którym charakterystyka fazowa przecina punkt -∏/4 oszacowaliśmy częstotliwości graniczne poszczególnych członów. Jak się okazało były one bardzo zbliżone do wartości wyznaczonych analitycznie.
Człon oscylacyjny w badanej przez nas konfiguracji charakteryzował się wzrostem amplitudy w funkcji częstotliwości (jak dla członu różniczkującego).
Nie zauważyliśmy także zwiększenia amplitudy w punkcie częstotliwości rezonansowej. Jak się potem okazało wynikło to z nieco nietrafnego doboru elementów, co spowodowało duży współczynnik tłumienia.
8
Wyszukiwarka
Podobne podstrony:
Regulatory przem, Studia, mechatronika, automatyka
automatyka sciaga na exam(1), Studia - Mechatronika PWR, Podstawy automatyki - wykład (Mirosław Łuko
PA pytania, Studia - Mechatronika PWR, Podstawy automatyki - wykład (Mirosław Łukowicz)
odpowiedzi -zarządzanie, Studia - Mechatronika PWR, Podstawy zarządzania - wykład (Teresa Maszczak)
Ch w9 8.12, Studia (Geologia,GZMIW UAM), I rok, Chemia
sprawozdanie automatyka2, studia, V semestr, Automatyka i robotyka, sprawko automaty stabilność
opracowanie 4 mechana, Studia - Mechatronika, III semestr, Mechanika Techniczna
Mechanizm strugarki, Księgozbiór, Studia, Maszynoznastwo i Automatyka
Ch w8 1.12, Studia (Geologia,GZMIW UAM), I rok, Chemia
TMM projekt, Studia Mechatronika, Semestr 4, TMM, Projekty
Elekrotechnika sprawko 1, Studia - Mechatronika, III semestr, Elektrotechnika
Metoda toru ocechowanego, Księgozbiór, Studia, Maszynoznastwo i Automatyka
Ch w1 6.10, Studia (Geologia,GZMIW UAM), I rok, Chemia
Zadania z kół z fizy, Studia Mechatronika, sem 1 i sem 2, fizyka
Tabelka OP, Studia - Mechatronika, II semestr, Obróbka Plastyczna
macierz2, studia, V semestr, Automatyka i robotyka, sprawko automaty stabilność
podstawy, studia - mechatronika UWM, rok I sm I i II, podstawy mechatroniki
więcej podobnych podstron