Rok studiów: pierwszy |
Nazwisko i imię: Krupa Michał |
Rok akademicki: 2000/2001 |
Numer ćwiczenia: 11 |
Temat: Sprawdzanie II zasady dynamiki dla ruchu obrotowego |
Nazwisko prowadzącego: Prof. Czesław Kajtoch |
Data rozpoczęcia ćwiczenia: Data zakończenia ćwiczenia: Data oddania sprawozdania: |
Ocena końcowa: |
|
Cele ćwiczenia
Doświadczalne sprawdzenie twierdzenia Steinera oraz sprawdzenie zależności (M) przy stałych momentach bezwładności.
Wstęp teoretyczny
Ruch obrotowy odbywa się wokół ustalonej osi. Gdy bryła obraca się wokół stałej osi to droga, prędkość i przyspieszenie liniowe każdego z jej punktów zależą od odległości od tej osi, wszystkie jednak punkty bryły przebywają taką samą drogę. Mają taką samą prędkość i przyspieszenie kątowe.
Druga zasada dynamiki dla ruchu obrotowego:
![]()
M - Moment sił wypadkowych działających na ciało,
I -Moment bezwładności
W ćwiczeniu tym korzystać będziemy ze wzorów:
opisujących spadek swobodny ciał ,
h- droga,
a- przyśpieszenie liniowe,
t- czas
związek między przyśpieszeniem kątowym, a liniowym,
a=r,
- przyśpieszenie kątowe
r- promień tulei łożyska osi obrotu.
Po przekształceniu otrzymamy:
![]()
,
Moment siły obliczamy ze wzoru:
M=mgr,
Twierdzenie Steinera mówi, że moment bezwładności względem osi O' jest równy sumie momentu bezwładności względem równoległej do niej osi O przechodzącej przez środek masy bryły i kwadratu odległości między obiema osiami.
![]()
![]()
Cele ćwiczenia.
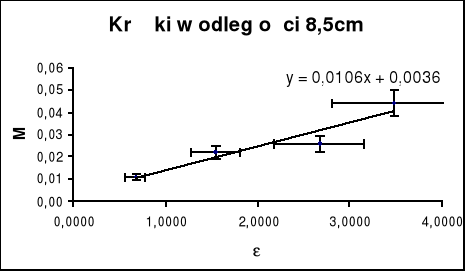
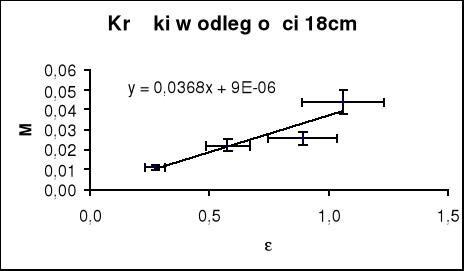
Doskonalenie umiejętności pomiarów długości, czasu, masy, planowanie pomiarów końcowych, sprawdzanie II zasady dynamiki przez wykreślenie graficznie zależności ε(M), przy stałych momentach bezwładności, oraz doświadczalne sprawdzenie twierdzenia Steinera.
TOK POSTĘPOWANIA
Należy ustawić wahadło, wyznaczamy masę krążków m. i masy obciążników oraz trzy wartości promieni. Wyznaczamy ruchy obciążników odległe o h, wykonujemy 4 serie pomiarów: bez krążków, krążki jak najbliżej osi obrotu, krążki w środkowym położeniu, oraz krążki maksymalnie odsunięte od osi obrotu, wyniki umieszczamy w tabelce i określamy zależność ε(M) przy I = const. Następnie z wykresów wyznaczamy momenty bezwładności, dla wybranego momentu siły przeprowadzamy pomiary w zależności od momentu bezwładności krzyża. Wyniki umieszczamy w tabeli i wykonujemy wykres ε(I-1). Tangens nachylenia otrzymanej prostej powinien być równy zadanemu momentowi siły, co sprawdzamy z danymi w tabeli.
Opracowanie wyników.
![]()
Niepewność pomiarową obliczamy metodą różniczki zupełnej:
![]()
Dla przyśpieszenia kątowego:
![]()
Dla momentu siły:
M=mgr
![]()
![]()
Dla poszczególnych momentów bezwładności:
![]()
, ![]()
![]()
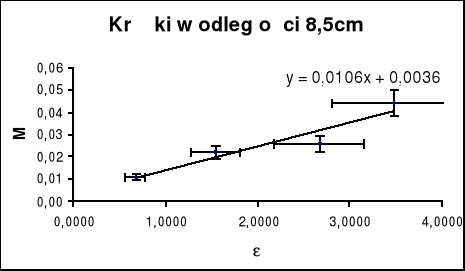
Pomiar 1
|
m [kg] |
t1 [s] |
t2 [s] |
tśr [s] |
M [Nm] |
[s-2] |
I [kgm2] |
1 |
0,1495 |
8,74 |
8,65 |
8,695 |
0,01100 |
2,43377 |
0,00452 |
2 |
0,2999 |
6,12 |
6,1 |
6,11 |
0,02206 |
4,92873 |
0,00448 |
3 |
0,3499 |
5,07 |
5,25 |
5,16 |
0,02574 |
6,91064 |
0,00372 |
4 |
0,5998 |
4,35 |
4,31 |
4,33 |
0,04412 |
9,81391 |
0,00450 |
Współczynnik kierunkowy wykresu względem pierwszej osi (tangens tego kąta jest szukaną przez nas wartością
|
m [kg] |
Procentowy udział |
t [s] |
Procentowy udział |
r [m] |
Procentowy udział |
h [m] |
Procentowy udział |
M [Nm] |
[s-2] |
I [kgm2] |
I I |
1 |
0,0001 |
0,02% |
0,2 |
14,61% |
0,001 |
84,71% |
0,001 |
0,92% |
0,0015 |
0,4400 |
0,0014 |
31,48% |
2 |
0,0001 |
0,02% |
0,2 |
19,61% |
0,001 |
79,86% |
0,001 |
0,87% |
0,0029 |
0,9870 |
0,0015 |
33,39% |
3 |
0,0001 |
0,02% |
0,2 |
22,41% |
0,001 |
77,09% |
0,001 |
0,84% |
0,0034 |
1,4671 |
0,0013 |
34,59% |
4 |
0,0001 |
0,01% |
0,2 |
25,61% |
0,001 |
73,94% |
0,001 |
0,80% |
0,0059 |
2,2293 |
0,0016 |
36,07% |
Uzyskaliśmy w ten sposób I0, które możemy podstawić do wzoru opisującego twierdzenie Steinera.
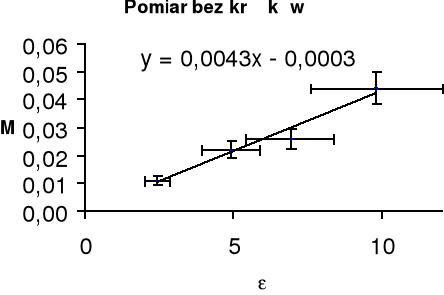
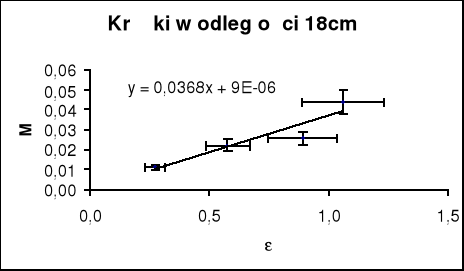
Pomiar 2
|
M [kg] |
t1 [s] |
t2 [s] |
tśr [s] |
M [Nm] |
[s-2] |
I [kgm2] |
1 |
0,1495 |
9,84 |
9,91 |
9,875 |
0,0110 |
1,8869 |
0,0058 |
2 |
0,2999 |
6,63 |
6,68 |
6,655 |
0,0221 |
4,1545 |
0,0053 |
3 |
0,3499 |
5,18 |
5,2 |
5,19 |
0,0257 |
6,8310 |
0,0038 |
4 |
0,5998 |
4,28 |
4,2 |
4,24 |
0,0441 |
10,2350 |
0,0043 |
Sprawdzimy teraz prawdziwość twierdzenia Steinera dla tego pomiaru.
![]()
m - masa krążków![]()
R1 - odległość krążków od osi obrotu![]()
Niepewność pomiarowa natomiast:
, dla i={1,2,3}
![]()
![]()
![]()
![]()
|
m [kg] |
Procentowy udział |
t [s] |
Procentowy udział |
r [m] |
Procentowy udział |
h [m] |
Procentowy udział |
M [Nm] |
[s-2] |
I [kgm2] |
I I |
1 |
0,0001 |
0,02% |
0,2 |
13,10% |
0,001 |
86,22% |
0,001 |
0,94% |
0,0015 |
0,3307 |
0,0018 |
30,93% |
2 |
0,0001 |
0,02% |
0,2 |
18,29% |
0,001 |
81,16% |
0,001 |
0,88% |
0,0029 |
0,8097 |
0,0017 |
32,86% |
3 |
0,0001 |
0,02% |
0,2 |
22,31% |
0,001 |
77,19% |
0,001 |
0,84% |
0,0034 |
1,4472 |
0,0013 |
34,55% |
4 |
0,0001 |
0,01% |
0,2 |
26,02% |
0,001 |
73,54% |
0,001 |
0,80% |
0,0059 |
2,3451 |
0,0016 |
36,26% |
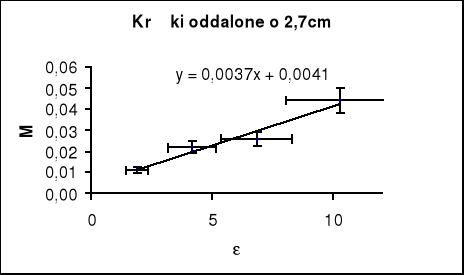
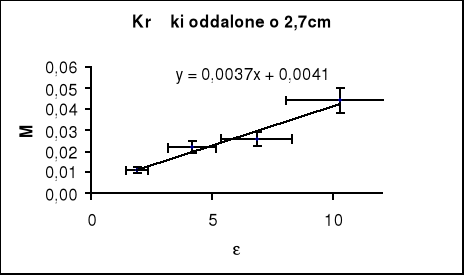
Pomiar 3
|
m [kg] |
t1 [s] |
t2 [s] |
tśr [s] |
M [Nm] |
[s-2] |
I [kgm2] |
1 |
0,1495 |
16,52 |
16,5 |
16,51 |
0,0110 |
0,6750 |
0,0163 |
2 |
0,2999 |
10,95 |
10,91 |
10,93 |
0,0221 |
1,5402 |
0,0143 |
3 |
0,3499 |
8,29 |
8,31 |
8,3 |
0,0257 |
2,6709 |
0,0096 |
4 |
0,5998 |
7,29 |
7,26 |
7,275 |
0,0441 |
3,4766 |
0,0127 |
![]()
m - masa krążków![]()
R2 - odległość krążków od osi obrotu![]()
![]()
![]()
![]()
![]()
|
m [kg] |
Procentowy udział |
t [s] |
Procentowy udział |
r [m] |
Procentowy udział |
h [m] |
Procentowy udział |
M [Nm] |
[s-2] |
I [kgm2] |
I I |
1 |
0,0001 |
0,01% |
0,2 |
8,27% |
0,001 |
91,01% |
0,001 |
0,99% |
0,0015 |
0,1073 |
0,0048 |
29,30% |
2 |
0,0001 |
0,01% |
0,2 |
12,00% |
0,001 |
87,42% |
0,001 |
0,95% |
0,0029 |
0,2640 |
0,0044 |
30,50% |
3 |
0,0001 |
0,01% |
0,2 |
15,22% |
0,001 |
84,23% |
0,001 |
0,92% |
0,0034 |
0,4887 |
0,0031 |
31,66% |
4 |
0,0001 |
0,01% |
0,2 |
17,01% |
0,001 |
82,49% |
0,001 |
0,90% |
0,0059 |
0,6597 |
0,0041 |
32,33% |
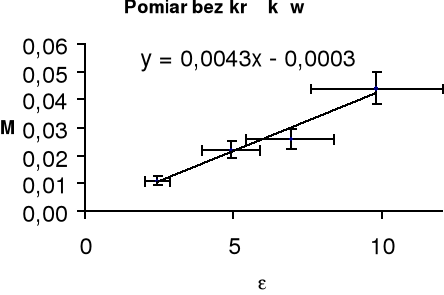
Pomiar 4
|
m [kg] |
t1 [s] |
t2 [s] |
tśr [s] |
M [Nm] |
[s-2] |
I [kgm2] |
1 |
0,1495 |
0,001 |
25,93 |
26,01 |
0,0110 |
0,2720 |
0,0404 |
2 |
0,2999 |
0,001 |
17,87 |
17,88 |
0,0221 |
0,5755 |
0,0383 |
3 |
0,3499 |
0,001 |
14,35 |
14,39 |
0,0257 |
0,8886 |
0,0290 |
4 |
0,5998 |
0,001 |
13,15 |
13,18 |
0,0441 |
1,0592 |
0,0416 |
![]()
m - masa krążków![]()
R3 - odległość krążków od osi obrotu![]()
![]()
![]()
![]()
![]()
|
m [kg] |
Procentowy udział |
t [s] |
Procentowy udział |
r [m] |
Procentowy udział |
h [m] |
Procentowy udział |
M [Nm] |
[s-2] |
I [kgm2] |
I I |
1 |
0,0001 |
0,01% |
0,2 |
5,41% |
0,001 |
93,84% |
0,001 |
1,02% |
0,0015 |
0,0408 |
0,0115 |
28,42% |
2 |
0,0001 |
0,01% |
0,2 |
7,69% |
0,001 |
91,69% |
0,001 |
1,00% |
0,0029 |
0,0904 |
0,0111 |
29,08% |
3 |
0,0001 |
0,01% |
0,2 |
9,38% |
0,001 |
90,03% |
0,001 |
0,98% |
0,0034 |
0,1445 |
0,0086 |
29,62% |
4 |
0,0001 |
0,00% |
0,2 |
10,16% |
0,001 |
89,30% |
0,001 |
0,97% |
0,0059 |
0,1749 |
0,0124 |
29,86% |
Wnioski.
Nie udało się potwierdzić prawdziwości twierdzenia Steinera w doświadczeniu z wahadłem Oberbecka. Spowodowane jest to zbyt dużą niepewnością pomiarową i mimo iż niektóre wyniki mieszczą się w granicach niepewności to jednak jest to zbyt duży rozrzut aby móc przyjąć te wyniki jako pewne. Największą niepewność pomiarową dawał promień tulei, ok. 90% oraz pomiar czasu co musiało wpłynąć ujemnie na uzyskane wyniki. Niepewność pomiarowa dla I wynosi ok. 34% uzyskanej wartości. Chcąc uzyskać mniejszą niepewność pomiarową należałoby zoptymalizować doświadczenie względem właśnie tego promienia.
Wyszukiwarka
Podobne podstrony:
I pracownia, wahadłomk, Rok studiów: pierwszy
FUNKCJE WYCHOWAWCZE GRUPY RÓWIEŚNICZEJ, materiały na studia, I rok studiów, Psychologia
stadiarozw, materiały na studia, I rok studiów, Psychologia
Aby nie dopuścić do nadwagi, materiały na studia, I rok studiów, Pedagogika społeczna i socjologia
referat1, materiały na studia, I rok studiów, Pedagogika społeczna i socjologia
POTRZEBY DZIECKA I POTRZEBY OPIEKUŃCZE, materiały na studia, I rok studiów, Teoria pracy opiekuńczo
instrukcja pierwszej pomocy wykaz pracownikow wyznaczonych do udzielania pierwszej pomocy
Bzyczy bzyk znad Bzury zbzikowane bzdury, materiały na studia, I rok studiów, Emisja głosu
zagadnienia na kolokwium z układu szkieletowego, I rok studiów WSR, I semestr
imiku sprawko zad5, Notatki, Elektronika AGH III rok, [STUDIA] rok 3, imiku, 6 pierwsze u tego czw
gen, imię, nazwisko i rok studiów
Silikonowe serum z Vitasource dla cery suchej dojrzałej, Moje;p, Kosmetyka, Pracownia Kosmetyczna, C
Akademia Rolnicza Rok studiow II
Pracownia dializa 5-6, I rok, Chemia ogólna, instrukcjewiczeniazchemiioglnej
etyka i deontologia tematy, I rok studiów WSR, II semestr, etyka i deontologia
Różano-migdałowy krem nawilżający, Moje;p, Kosmetyka, Pracownia Kosmetyczna, Cera sucha z pierwszymi
Konfucjonizm, materiały na studia, I rok studiów, Filozofia
więcej podobnych podstron