
POSZUKIWANIE
OBIEKTÓW NA MORZU

Poszukiwanie obiektów na morzu ma na celu wykrycie lub
stwierdzenie faktu nieobecności obiektu w określonym akwenie
(rejonie). Manewr poszukiwania składa się z dwóch zasadniczych
etapów:
– manewr zbliżenia się do określonego rejonu na odległość
efektywnego wykrywania obiektów przez środki obserwacji okrętu
poszukującego,
– przeszukanie określonego rejonu.
Wyróżniamy dwa zasadnicze rodzaje poszukiwania:
– poszukiwanie obiektów nieruchomych (nie będących w ruchu),
– poszukiwanie obiektów ruchomych (będących w ruchu).

POSZUKIWANIE OBIEKTU
NIERUCHOMEGO
Przez pojęcie „obiekt nieruchomy” należy rozumieć obiekt
nie przemieszczający się celowo za pomocą własnego napędu.
Jeżeli znamy prawdopodobne miejsce obiektu poszukiwane-
go, wówczas poszukiwanie możemy przeprowadzić następu-
jącymi sposobami:
– sposobem powiększającego się kwadratu,
– sposobem sektorowym,
– jeżeli gęstość rozkładu miejsca znajdowania obiektu
jest jednakowa na obszarze określonego rejonu,
wówczas rejon ten przeszukujemy sposobem halsów
(tras) równoległych.
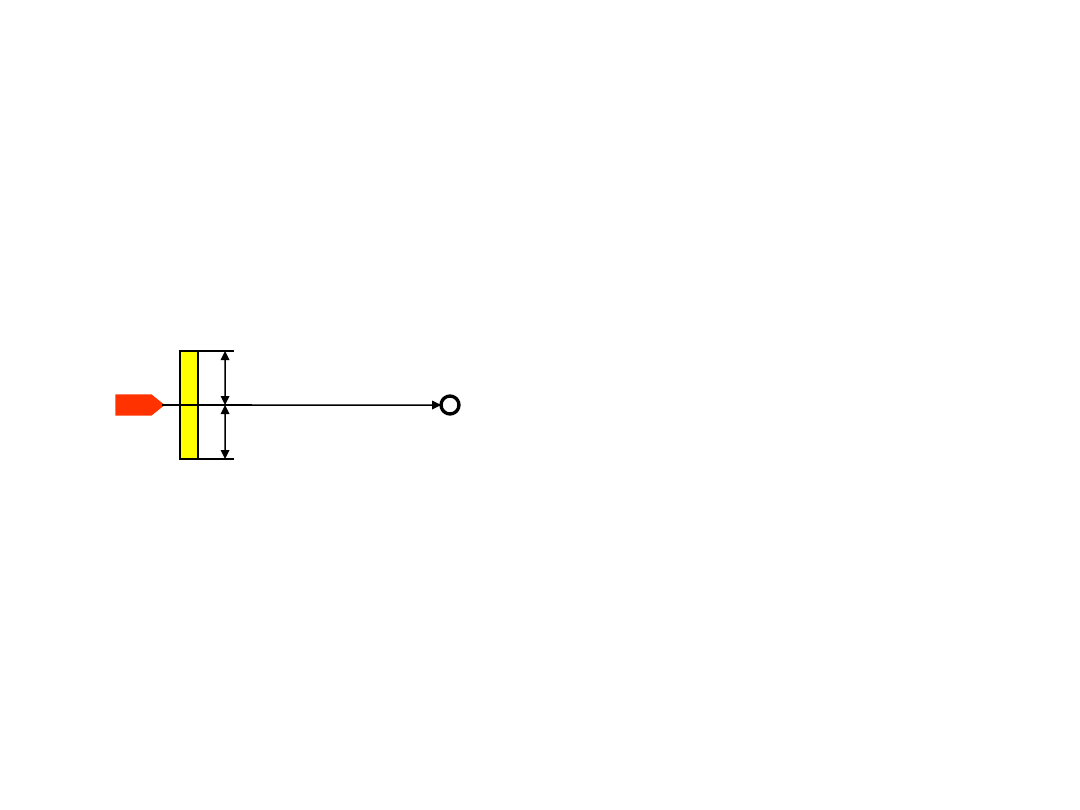
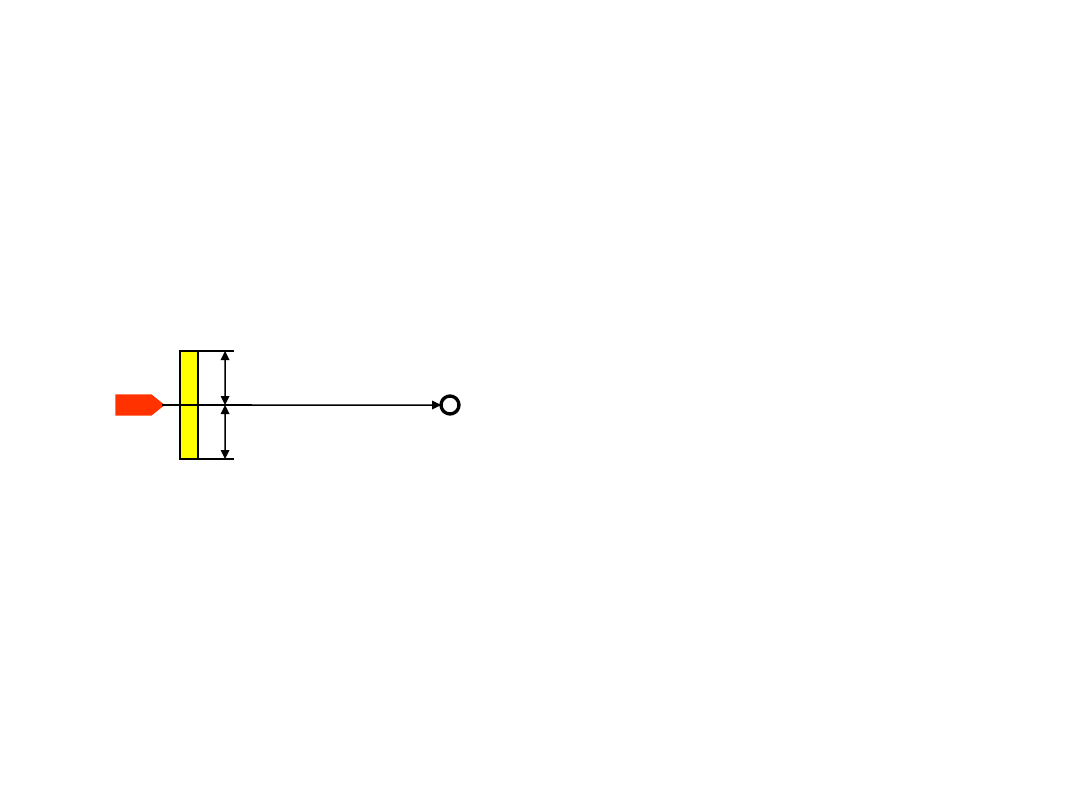
SPOSÓB POWIĘKSZJĄCEGO SIĘ
KWADRATU
Okręt poszukujący o
zasięgu wykrycia d
W
M
0
K
0
Kurs zbliżenia
d
W
d
W
z pozycji M
0
manewruje kursem
zbliżenia do
prawdopodobnej pozycji
obiektu poszukiwanego
K
0
.
M
0
K
0
Kurs zbliżenia
d
W
d
W
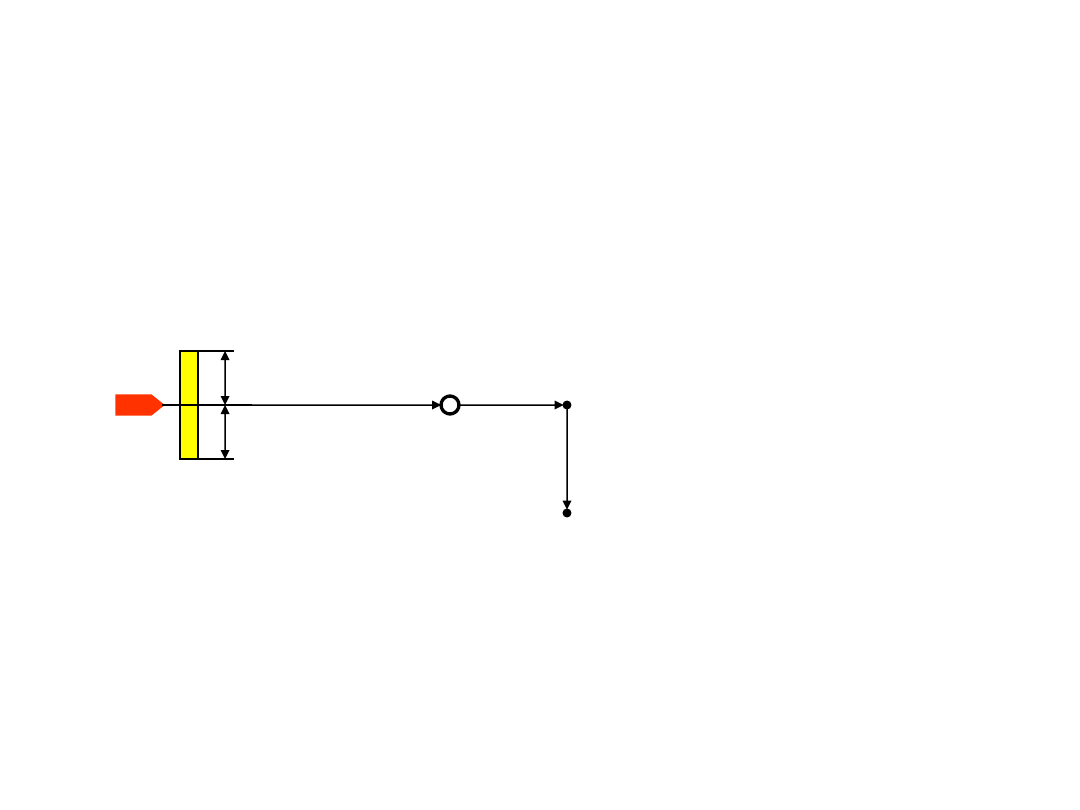
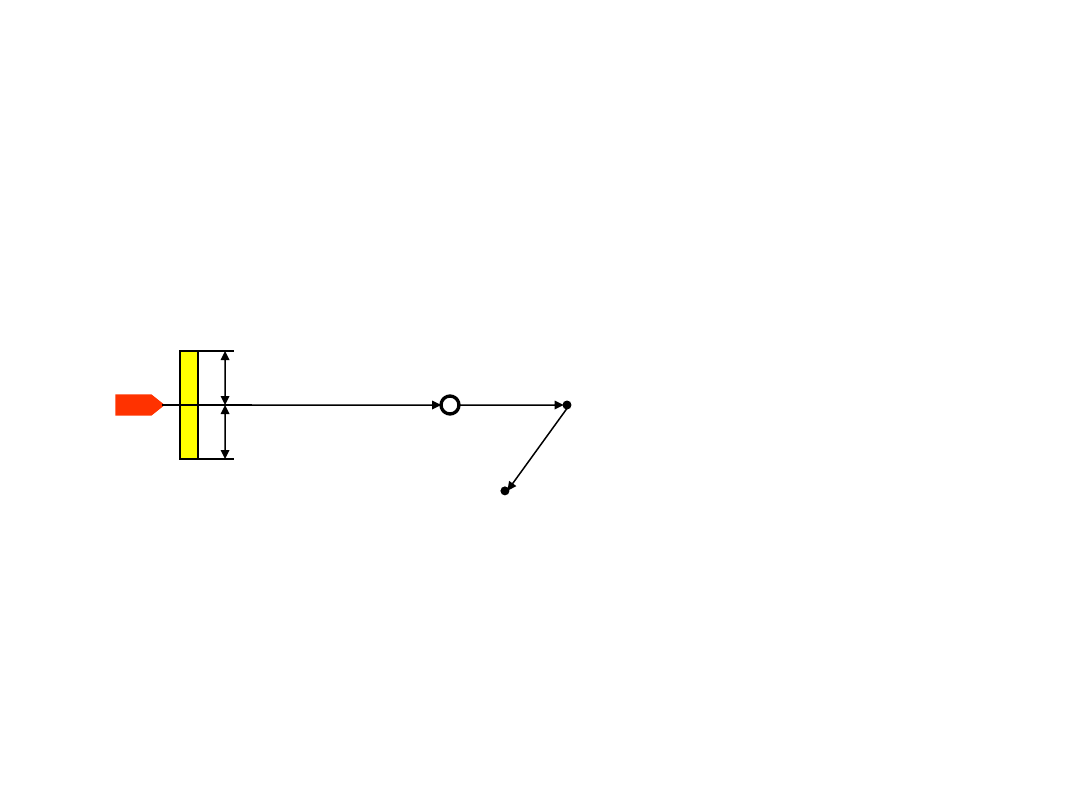
Jeżeli nie odnajdzie
poszukiwanego obiektu,
to manewruje dalej tym
samym kursem na
odległość dwóch
zasięgów wykrycia (2d
W
)
do pozycji M
1
.
2d
W
M
1
Przy negatywnym wyniku
poszukiwania wykonuje
zwrot w dowolną stronę o
90
0
i przechodzi drogę
równą dwom zasięgom
wykrycia do pozycji M
2
.
2d
W
M
2
M
0
K
0
Kurs zbliżenia
d
W
d
W
2d
W
M
1
2d
W
M
2
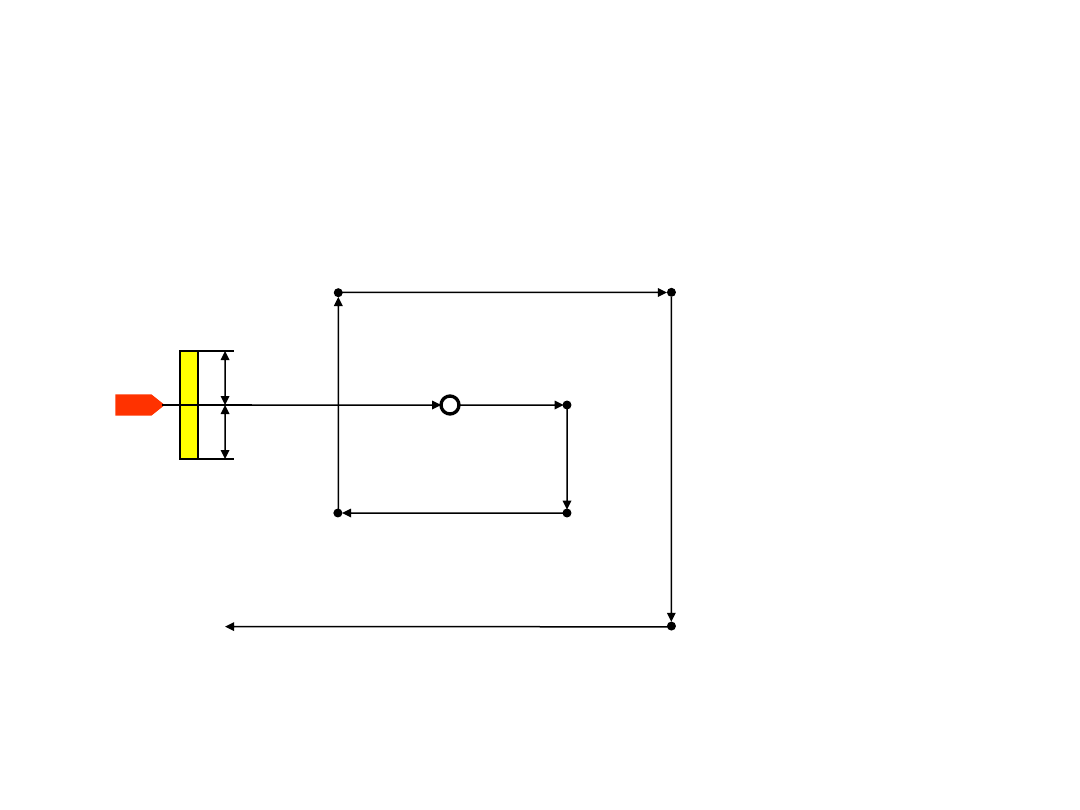
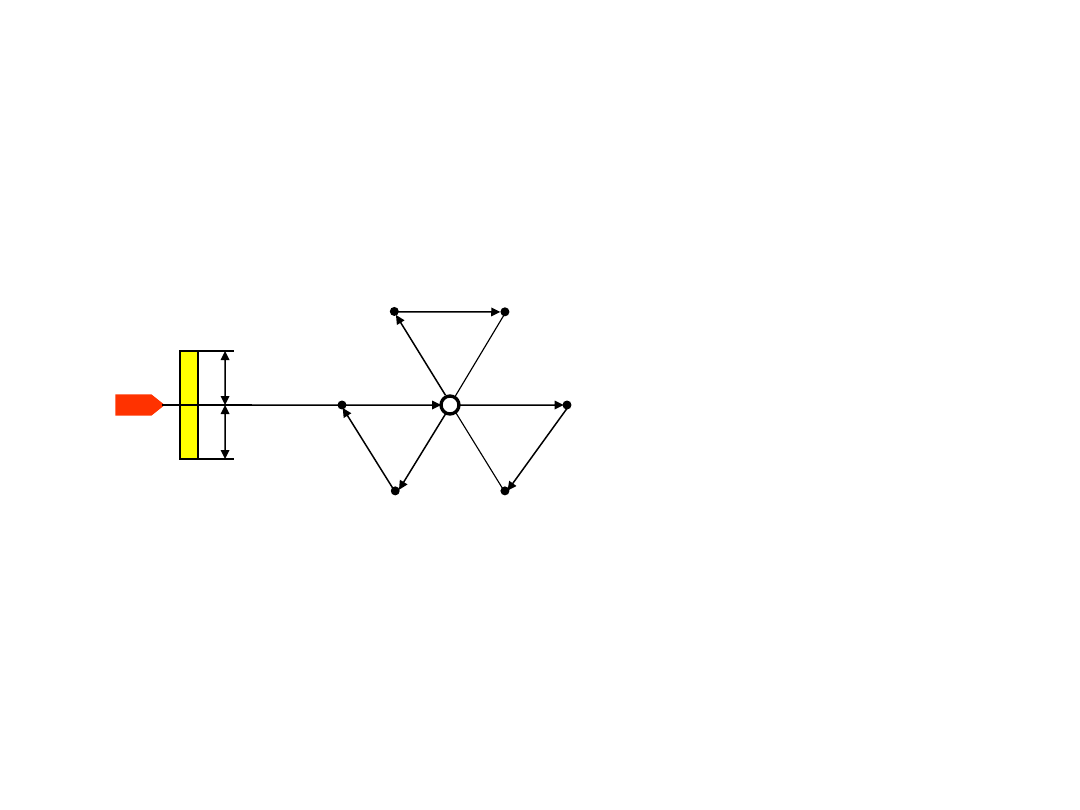
Manewr powtarza się
kilkakrotnie przebywając
na poszczególnych
halsach drogi: 4d
W
,
4d
W
M
3
4d
W
,
4d
W
M
4
6d
W
,
6d
W
6d
W
,
6d
W
M
5
8d
W
itd.
M
6
8d
W

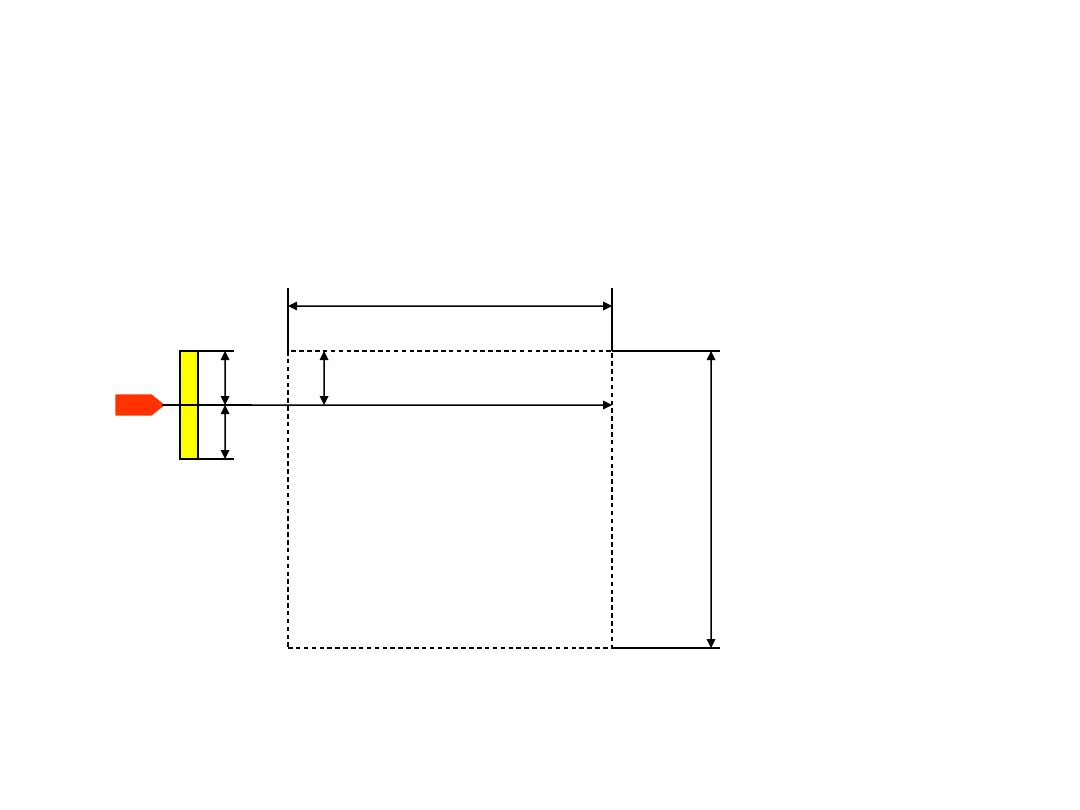
Poszukiwanie można zakończyć jeżeli kwadrat pokryje
zarówno błąd określania pozycji, jak też obszar
możliwego przemieszczenia się obiektu pod wpływem
wiatru lub prądu.
POSZUKIWANIE SPOSOBEM
SEKTOROWYM
Okręt poszukujący o
zasięgu wykrycia d
W
d
W
d
W
z pozycji M
0
M
0
manewruje kursem
zbliżenia do
prawdopodobnej
pozycji obiektu
poszukiwanego K
0
.
Kurs zbliżenia
K
0
M
0
d
W
d
W
Kurs zbliżenia
K
0
Jeżeli nie odnajdzie
poszukiwanego obiektu,
to manewruje dalej tym
samym kursem na
odległość dwóch
zasięgów wykrycia (2d
W
)
do pozycji M
1
.
2d
W
M
1
Przy negatywnym
wyniku poszukiwania
wykonuje zwrot o 120
0
i
przechodzi drogę równą
dwom zasięgom
wykrycia do pozycji M
2
.
2d
W
M
2
Następnie wykonuje
kolejny zwrot o 120
0
i
przechodzi drogę równą
4d
W
do pozycji M
3
.
Wykonuje następny
zwrot o 120
0
i przechodzi
drogę równą 2d
W
do
pozycji M
4
.
M
0
d
W
d
W
Kurs zbliżenia
K
0
2d
W
M
1
2d
W
M
2
2d
W
2d
W
M
3
2d
W
M
4
W podobny sposób
wykonuje kolejne
manewry do zakończenia
poszukiwania jeżeli
obszar pokryje zarówno
błąd określania pozycji,
jak też możliwe
przemieszczenie się
obiektu pod wpływem
wiatru lub prądu.
2d
W
2d
W
2d
W
M
5
M
6

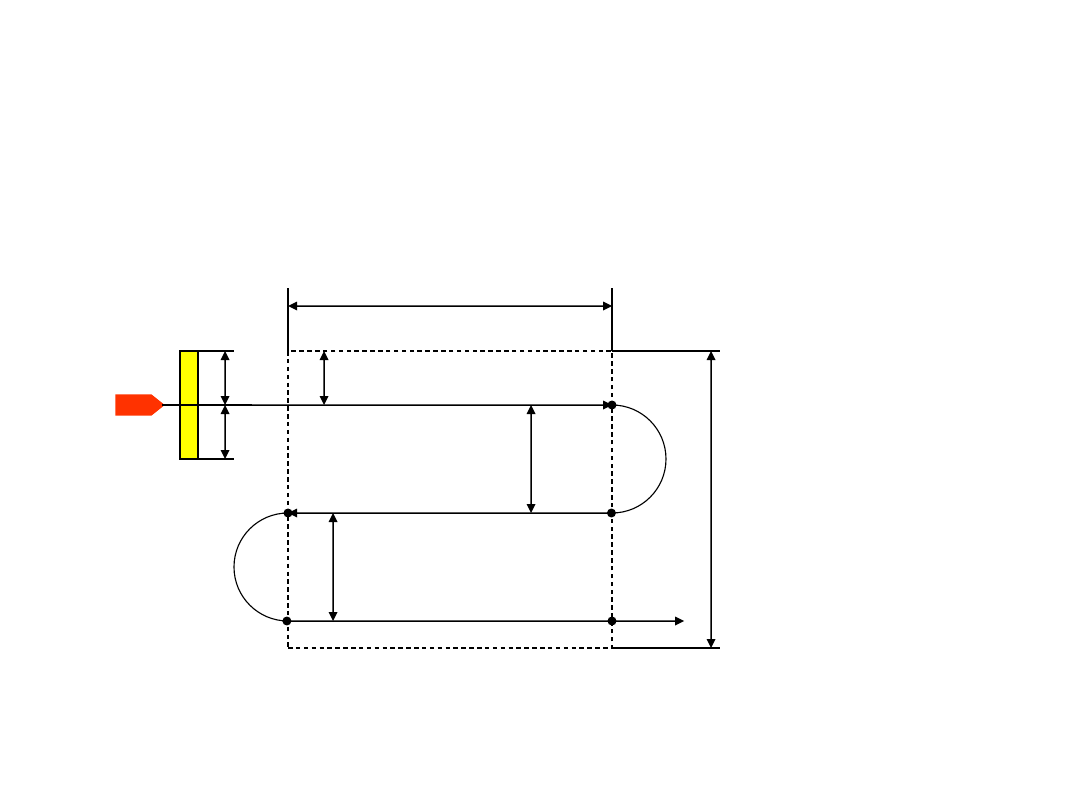
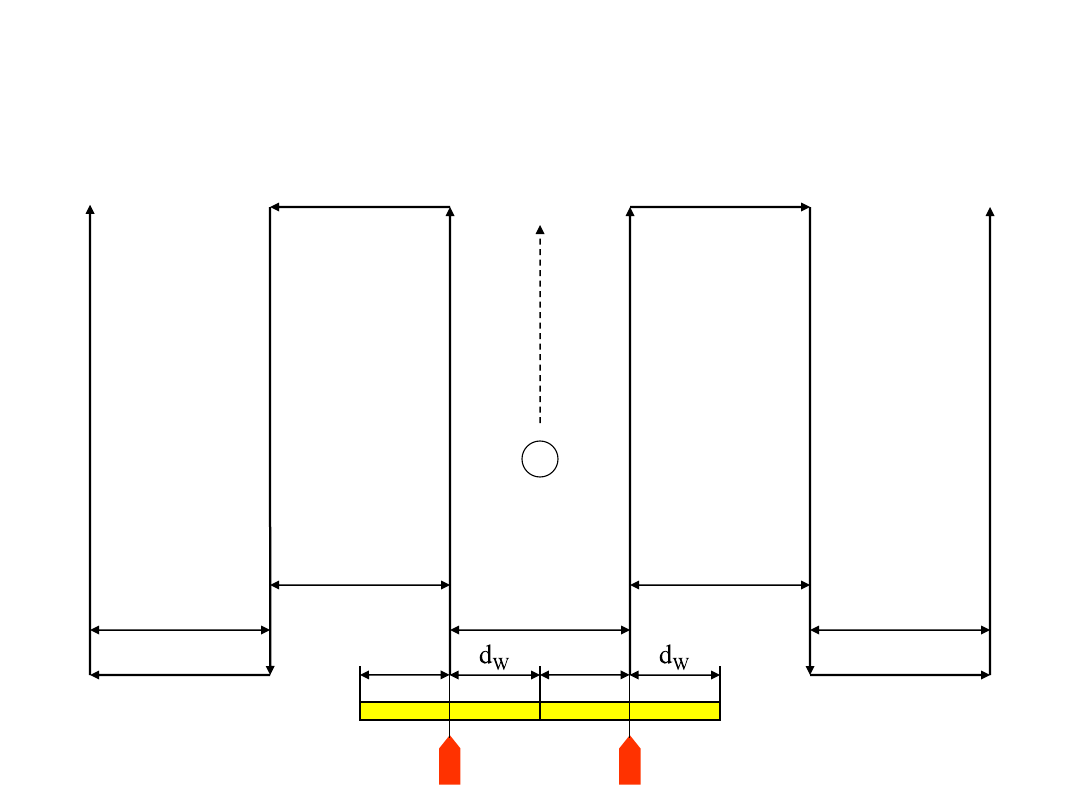
POSZUKIWANIE HALSAMI
RÓWNOLEGŁYMI
Okręt poszukujący
d
W
d
W
rozpoczyna
poszukiwanie od
krawędzi
wyznaczonego rejonu
L
rej
B
rej
idąc wzdłuż dłuższego
boku w odległości d
W
.
d
W
M
0
d
W
d
W
L
rej
B
rej
d
W
M
0
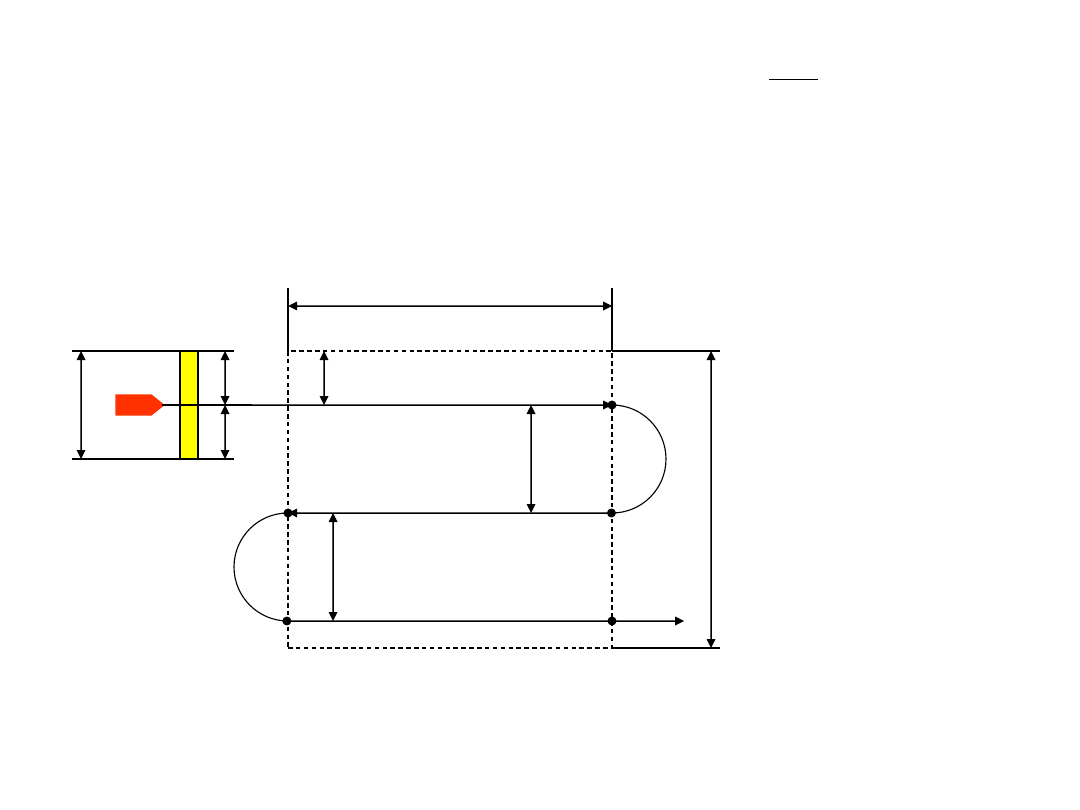
Po dojściu do krawędzi
bocznej rejonu (pozycja
M
1
),
M
1
wykonuje zwrot na
kontrkurs z takim
wyliczeniem, aby
następny hals był w
odległości 2d
W
od
poprzedniego.
2d
W
2d
W
M
2
M
3
M
4
M
5
d
W
d
W
L
rej
B
rej
d
W
M
0
M
1
2d
W
2d
W
M
2
M
3
M
4
M
5
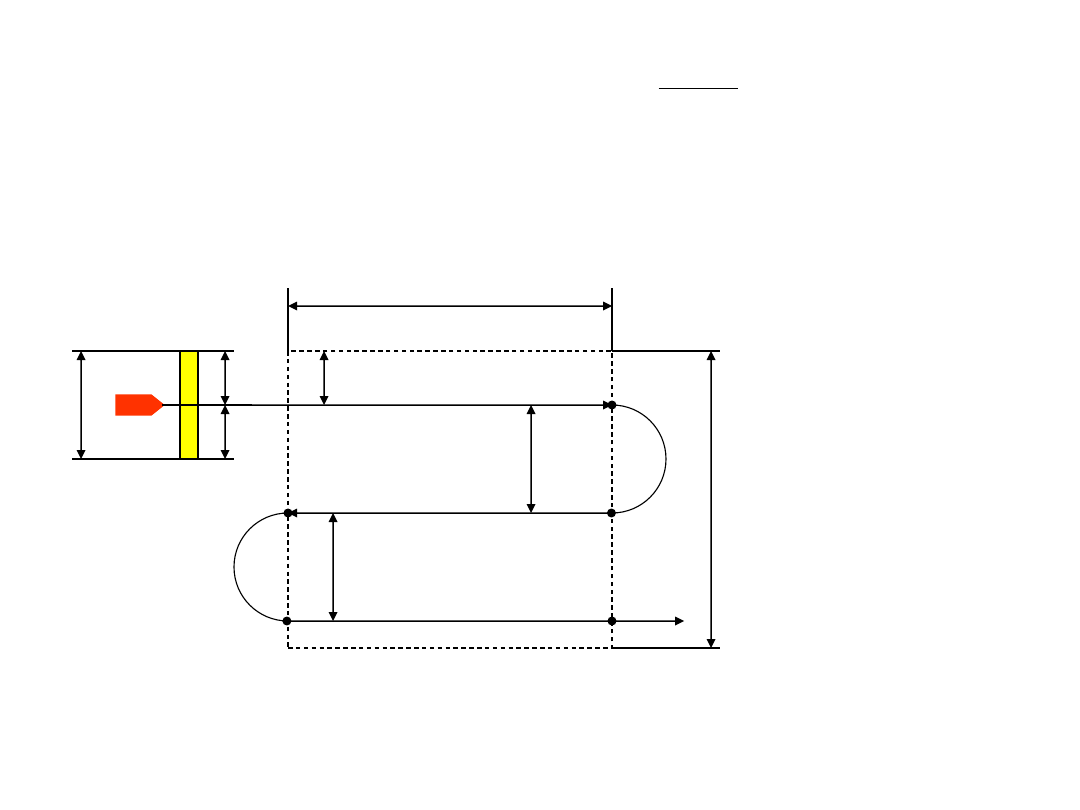
Liczbę halsów obliczamy ze wzoru
ef
rej
B
B
n
B
ef
gdzie: n – liczba halsów
B
rej
– szerokość rejonu
B
ef
– efektywna szerokość pasa poszukiwania
d
W
d
W
L
rej
B
rej
d
W
M
0
M
1
2d
W
2d
W
M
2
M
3
M
4
M
5
B
ef
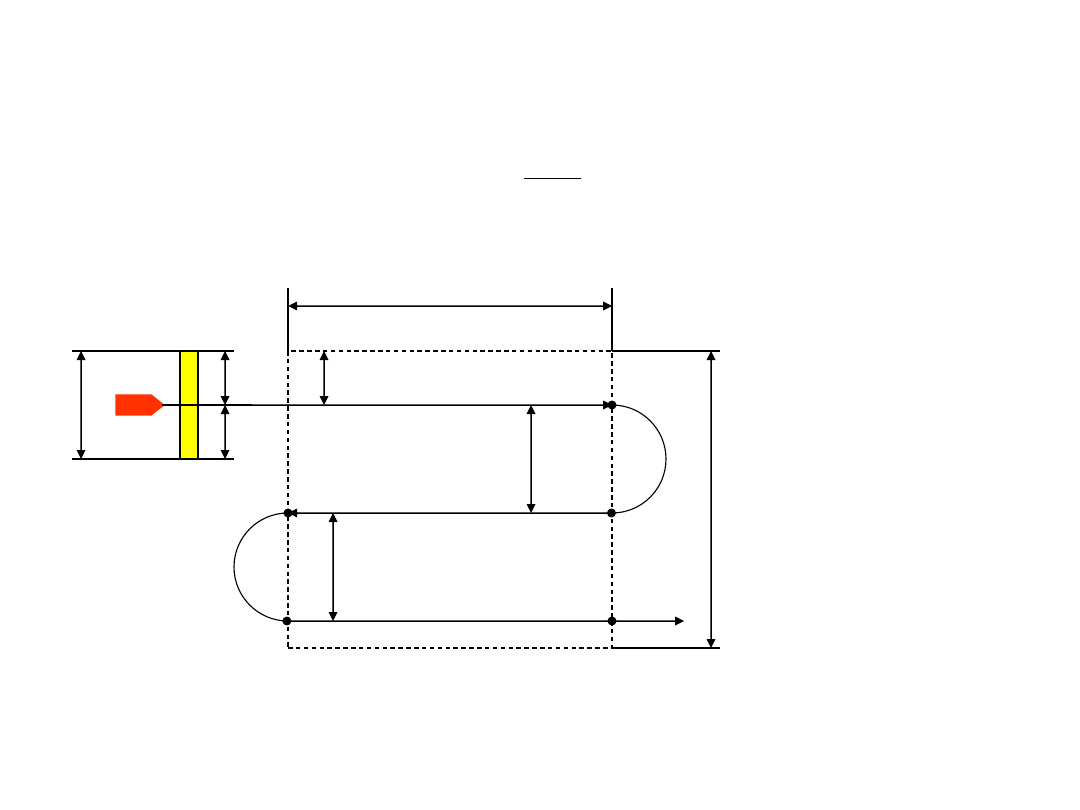
Czas poszukiwania obliczamy ze wzoru:
)
1
n
(
zwrotu
Mp
rej
p
T
V
L
n
T
gdzie: L
rej
– długość rejonu poszukiwania
V
Mp
– prędkość podczas poszukiwania
d
W
d
W
L
rej
B
rej
d
W
M
0
M
1
2d
W
2d
W
M
2
M
3
M
4
M
5
B
ef
Jeżeli B
ef
> B
rej
, to rejon zostanie przeszukany za pierwszym
halsem. Wówczas czas poszukiwania obliczamy ze wzoru:
Mp
rej
p
V
L
T
POSZUKIWANIE HALSAMI RÓWNOLEGŁYMI
PROWADZONE PRZEZ DWIE JEDNOSTKI
Prawdopodo-
bna pozycja
poszukiwan-
ego obiektu
Kier
u
n
ek dr
yfu
d
W
d
W
2d
W
2d
W
2d
W
2d
W
2d
W
Jednostka 1
Jednostka 2
POSZUKIWANIE HALSAMI RÓWNOLEGŁYMI
PROWADZONE PRZEZ CZTERY JEDNOSTKI
Prawdopodo-
bna pozycja
poszukiwan-
ego obiektu
Ki
er
u
n
ek
d
ryf
u
d
W
d
W
d
W
d
W
d
W
Jednostka 1
Jednostka 3
Jednostka 2
Jednostka 4
2d
W
2d
W
2d
W
2d
W
2d
W
2d
W
2d
W
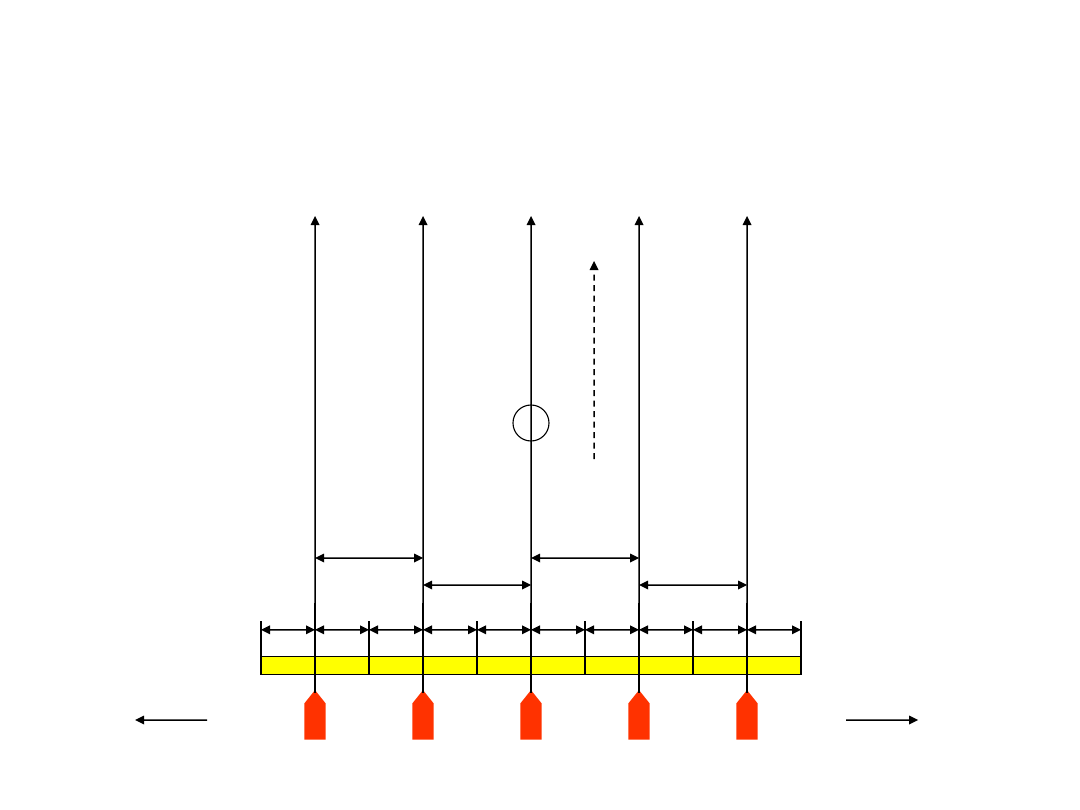
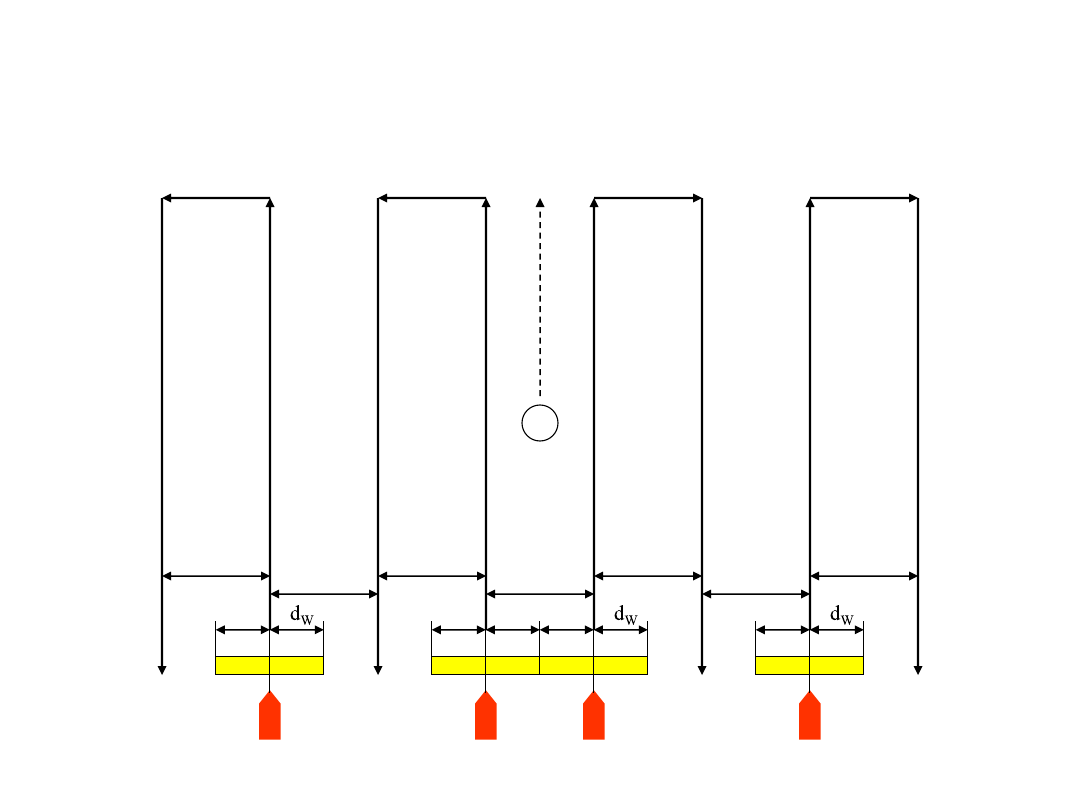
POSZUKIWANIE HALSAMI RÓWNOLEGŁYMI
PROWADZONE PRZEZ PIĘĆ LUB WIĘCEJ
JEDNOSTEK
Ki
er
u
n
ek
d
ryf
u
P
ra
wdopodobna
poz
y
cja
posz
ukiwa
ne
g
o
obiektu
d
W
d
W
d
W
d
W
d
W
d
W
d
W
d
W
d
W
d
W
2d
W
2d
W
2d
W
2d
W
Jednostka 1
Jednostka 3
Jednostka 5
Jednostka 2
Jednostka 4
7 itd
6 itd
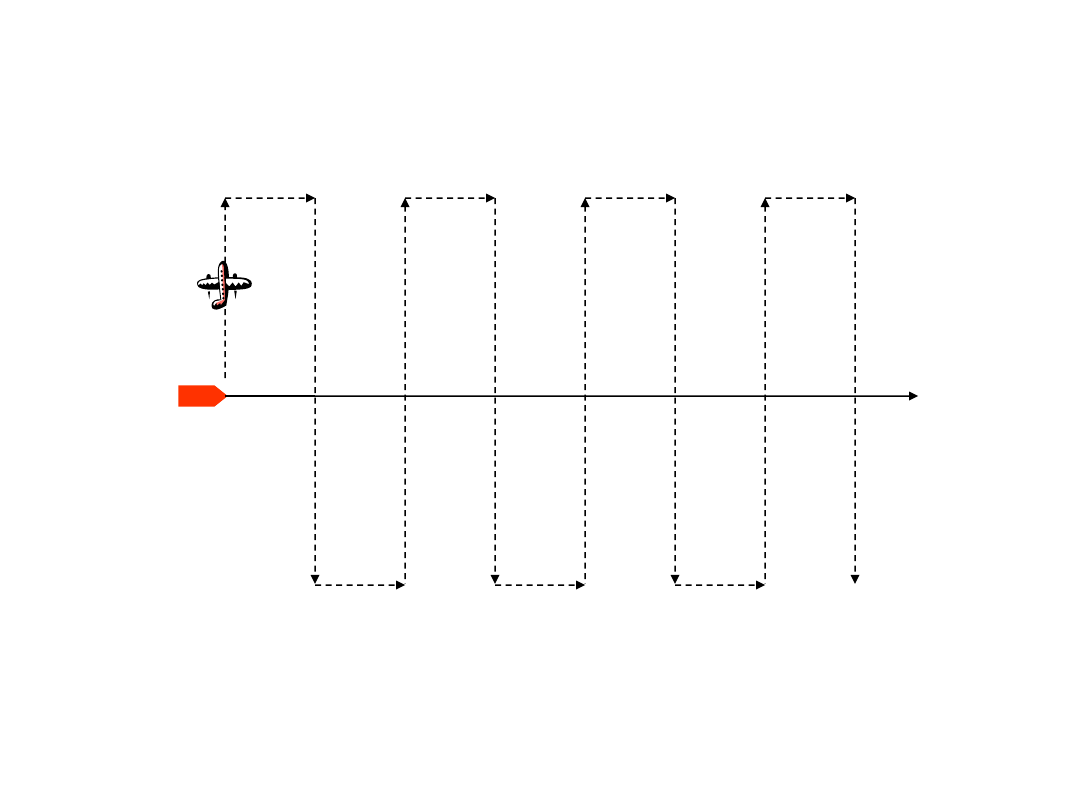
POSZUKIWANIE SKOORDYNOWANE 1
jednostka i 1 samolot
Kurs jednostki zalecony przez kierownika akcji na miejscu wypadku
Tego rodzaju poszukiwanie należy stosować wyłącznie, gdy na miejscu akcji znajduje się jej kierownik. Ideą tego
poszukiwania jest wykonywanie większości poszukiwań przez samolot, podczas gdy jednostka porusza się kursem
i prędkością wyznaczonymi przez kierownika akcji tak, aby samolot mógł jego pozycję traktować jako
nawigacyjny punkt odniesienia. Samolot, przelatując nad jednostką, może łatwo wprowadzić poprawki, aby
utrzymać się na trasie wynikającej z przyjętego wzoru poszukiwań. Takie skoordynowane poszukiwanie daje
większe prawdopodobieństwo wykrycia, niż może normalnie być osiągnięte przez samolot na obszarze o tych
wymiarach.
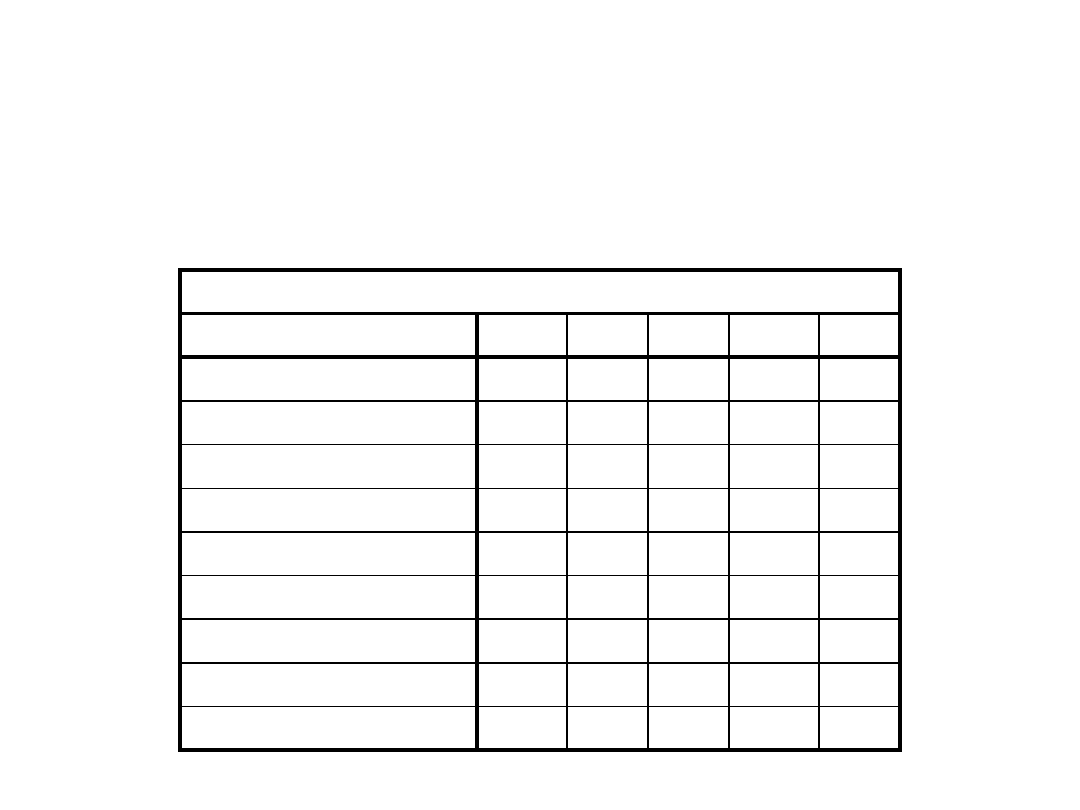
Odległości (2d
W
) między jednostkami pokazane w poniższej tabeli są zalecane do użycia we
wszystkich wzorach poszukiwań. Tabela uwzględnia typ poszukiwanego obiektu oraz
widzialność. Odległości między jednostkami mogą być jednak nieco zmniejszone dla
zwiększenia możliwości wykrycia lub mogą być zwiększone w celu pokrycia większego
obszaru w danym czasie.
Odległości między jednostkami
Widzialność (mile morskie)
Obiekt poszukiwany
3
5
10
15
20
Człowiek w wodzie
0,4
0,5
0,6
0,7
0,7
Tratwa 4-osobowa
2,3
3,2
4,2
4,9
5,5
Tratwa 6-osobowa
2,5
3,6
5,0
6,2
6,9
Tratwa 15-osobowa
2,6
4,0
5,1
6,4
7,3
Tratwa 25-osobowa
2,7
4,2
5,2
6,5
7,5
Łódź 5 m
1,1
1,4
1,9
2,1
2,3
Łódź 7 m
2,0
2,9
4,3
5,2
5,8
Łódź 12 m
2,8
4,5
7,6
9,4
11,6
Łódź 24 m
3,2
5,6
10,7
14,7
18,1
Wyszukiwarka
Podobne podstrony:
Obiekty religijne na nieruchomo Nieznany
biologia zakres materiau na egz Nieznany (2)
5 Wplyw dodatkow na recyklingu Nieznany
PISEMNY EGZAMIN TESTOWY NA STOP Nieznany
Aerobik Step aerobik na laweczk Nieznany (2)
Formowanie ladunkow na srodkach Nieznany
II Konwencja genewska o polepszeniu losu rannych, chorych i rozbitków sił zbrojnych na morzu
Poszukiwanie wzrokowe2007 id 21 Nieznany
Leki wplywajace na mechanizmy k Nieznany
,fizyka 1 C, dzialania na wekto Nieznany (2)
200402 kajak na morzu
2 Prognozowanie na podstawie s Nieznany (2)
Biuro rachunkowe ALFA poszukuje kandydatów na stanowisko księgowy
Geoffrey A Landis ?le na Morzu Diraca
7 Sterowanie logiczne na bazie Nieznany
II Konwencja genewska o polepszeniu losu rannych, chorych i rozbitków sił zbrojnych na morzu en
FOLIE porz udek na strzelnicy i Nieznany
więcej podobnych podstron