Podstawy budowy komputera PC (na podstawie WIKIPEDII)
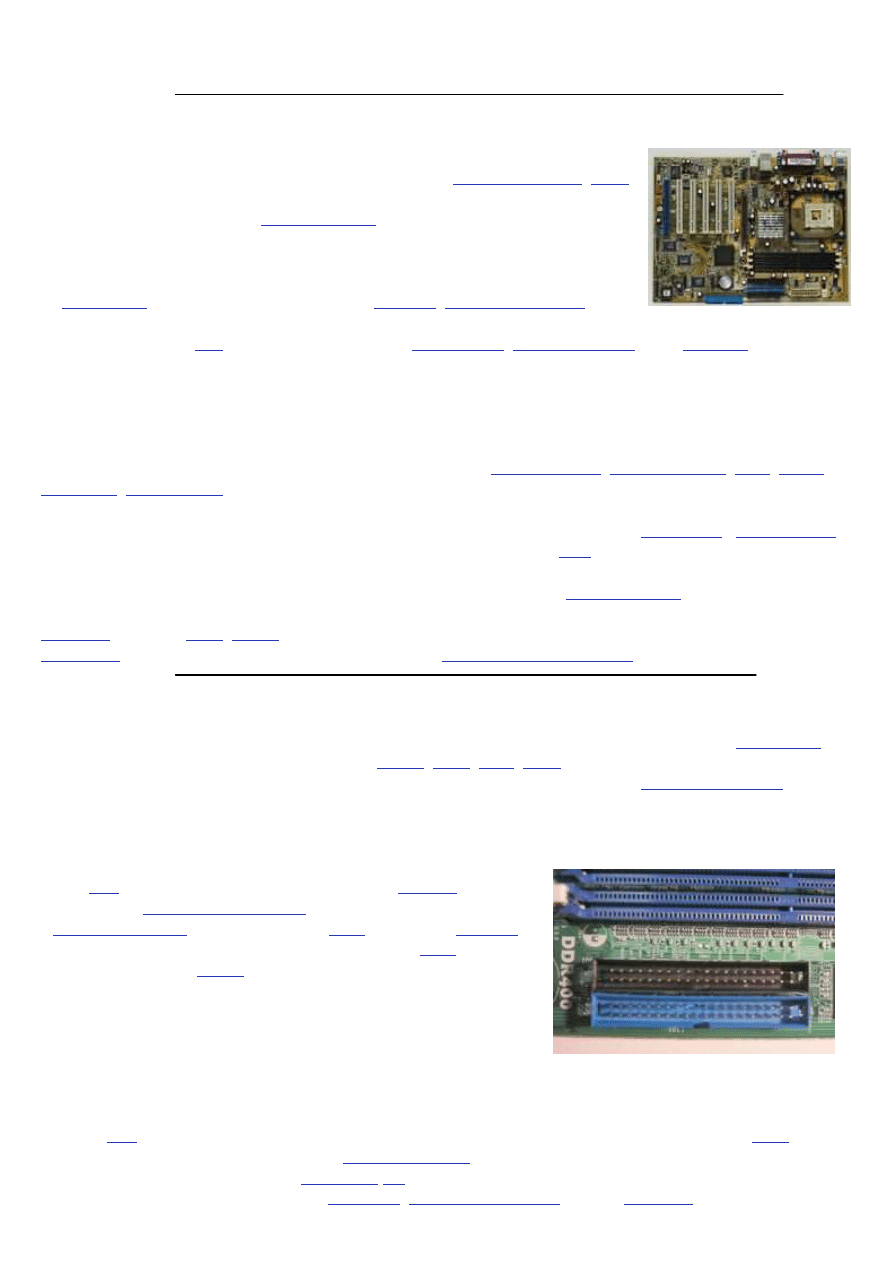
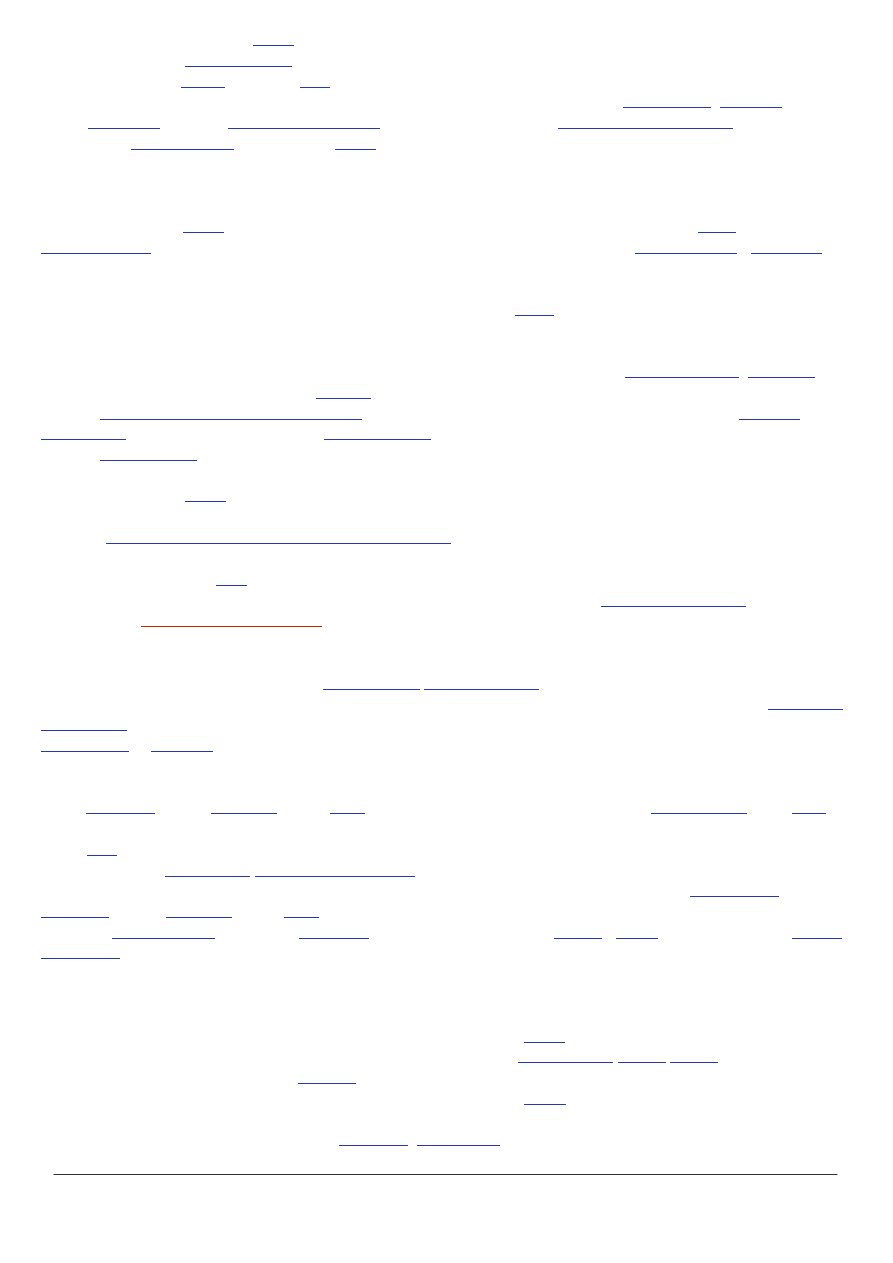
Płyta główna
Płyta główna P4PE firmy
ASUSTeK Computer
(
ASUS
)
Płyta główna w urządzeniach
elektronicznych
to najważniejsza płyta drukowana
urządzenia na której zamontowano najważniejsze elementy urządzenia,
umożliwiająca komunikację wszystkim pozostałym komponentom i modułom.
W
komputerze
na płycie głównej znajdują się
procesor
,
pamięci operacyjna
lub
gniazda do zainstalowania tych urządzeń oraz gniazda do zainstalowania dodatkowych płyt zwanych kartami
rozszerzającymi (np.
PCI
), urządzeń składujących (
dyski twarde
,
napędy optyczne
itp.) i
zasilacza
.
Koncepcję zbudowania komputera osobistego wyposażonego tylko w minimum potrzebnych urządzeń
zmontowanych na jednej płycie drukowanej oraz gniazd do których podłącza się dodatkowe urządzenia
zapoczątkowała firma IBM wprowadzając komputer osobisty zwany PC.
W konstrukcjach oraz dla niektórych urządzeń zewnętrznych (
port szeregowy
,
port równoległy
,
USB
,
złącze
klawiatury
,
złącze myszy
).
Kontrolery poszczególnych urządzeń zgrupowane są głównie w dwóch mostkach -
północnym
i
południowym
.
Mostek północny, podłączony bezpośrednio do procesora przy pomocy
FSB
, zawiera kontroler pamięci oraz
kontroler szyny graficznej (w przypadku zintegrowania kontrolera pamięci z procesorem mostek ten może nie
występować, wówczas bezpośrednio do procesora podłączany jest przez
HyperTransport
mostek południowy).
Mostek południowy, podłączony do mostka północnego, może zawierać kontrolery PCI, USB, dźwięku,
Ethernetu
, dysków (
ATA
,
SATA
); do niego też zazwyczaj podłączone są dodatkowe zewnętrzne kontrolery (np.
IEEE 1394
). Na płycie głównej umieszczony jest także
zegar czasu rzeczywistego
.
Kontroler
Kontroler, urządzenie kontrolujące i regulujące pracę różnych urządzeń znajdujących się np. w
komputerze
.
Można tam znaleźć między innymi kontrolery
SATA
,
ATA
,
USB
,
SCSI
itd. Komputerowe kontrolery można
podzielić na wewnętrzne (wbudowane w płytę główną) lub umieszczane wewnątrz
jednostki centralnej
portach
PCI, PCI X, PCI E, ISA i zewnętrzne umieszczane w portach USB, PCIMCA (w laptopach), COM.
ATA (
ang.
Advanced Technology Attachments) -
interfejs
systemowy w
komputerach klasy PC
przeznaczony do komunikacji
z
dyskami twardymi
zaproponowany w
1983
przez firmę
Compaq
.
Używa się także skrótu IDE (zamiennie z ATA), od
2003
roku
(kiedy wprowadzono
SATA
) standard ten jest określany jako PATA
(od "Parallel ATA").
Standard ATA jest ciągle rozwijany w kierunku zwiększania
szybkości transmisji. Początkowo stosowano oznaczenia ATA-1, -2
itd., obecnie używa się określeń związanych z zegarem taktującym interfejs (ATA/33, ATA/66, ATA/100,
ATA/133).
ATAPI (
ang.
Advanced Technology Attachment Packet Interface) - rozszerzona wersja standardu
ATA
, który
początkowo przeznaczony był do obsługi
dysków twardych
. Wersja ta stworzona ze względu na
zapotrzebowanie na podłączanie do
komputera
PC
innych urządzeń, zazwyczaj obsługujących wymienne
media. Głównie dotyczyło to, napędów
CD-ROM
,
napędów taśmowych
, czy też
dyskietek
o dużych rozmiarach
PeCetologia str. 2 z 12
-
ZIP
,
SuperDisk
. W wyniku wprowadzonych zmian w standardzie ATA, od tamtej pory przyjął on nazwę
ATA/ATAPI - jednak większość osób posługuje się jego starą, krótszą nazwą.
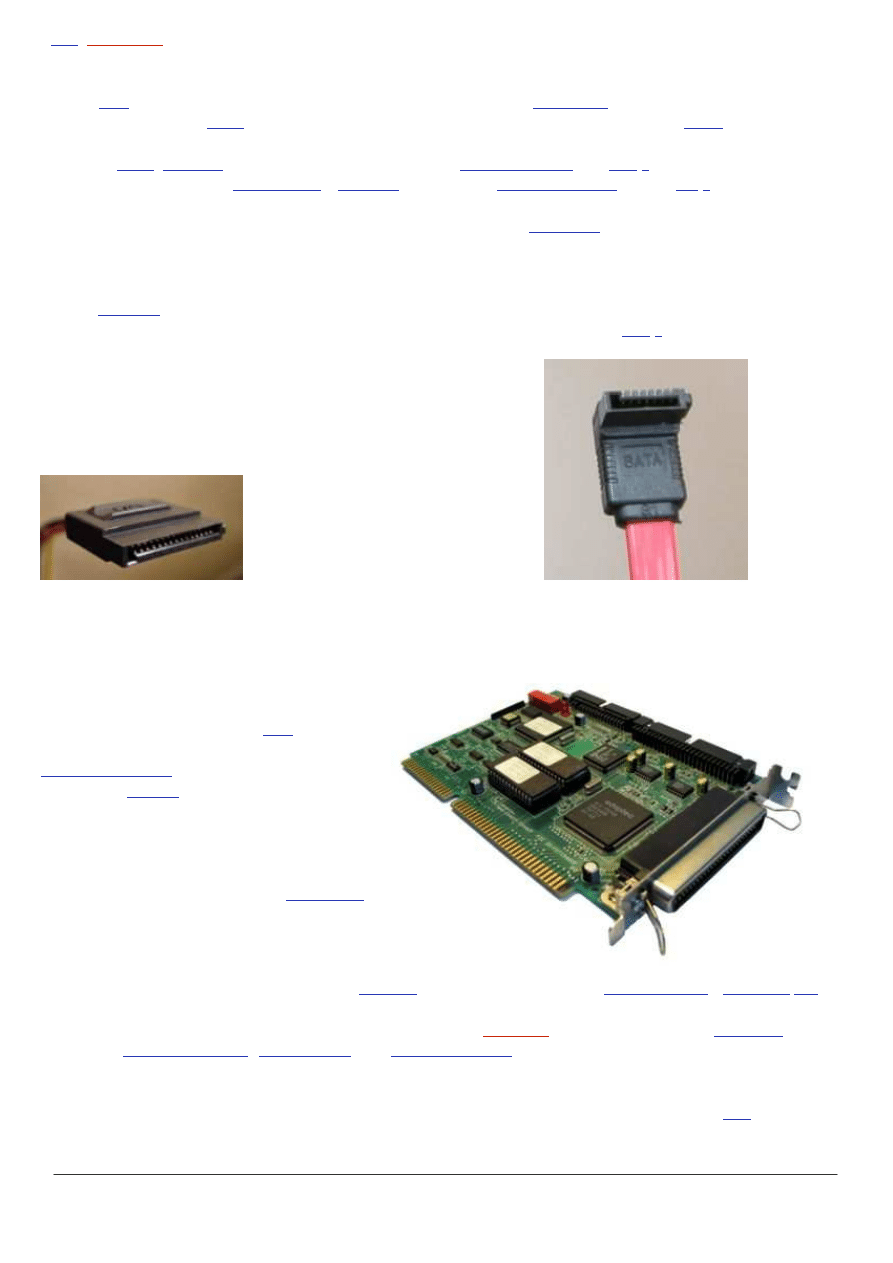
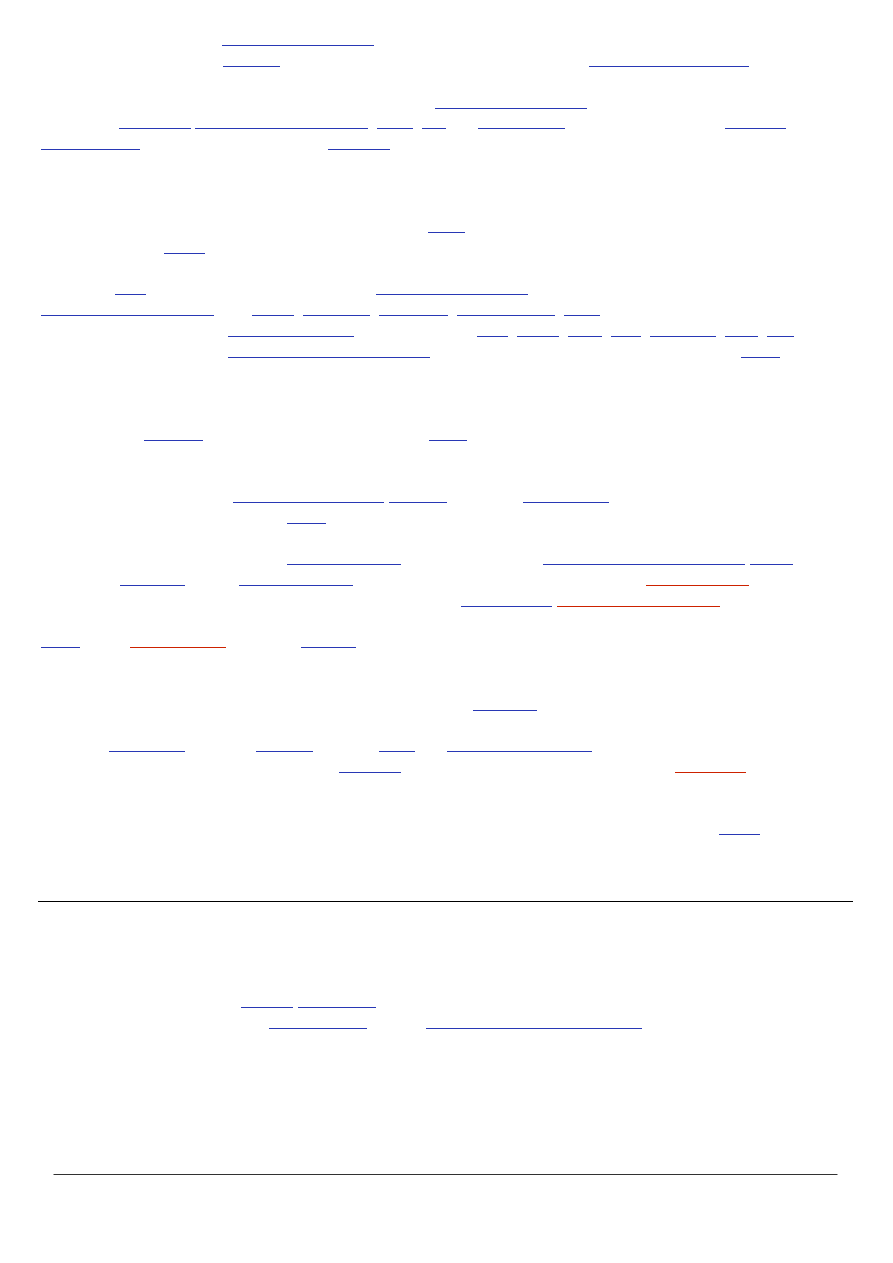
SATA (
ang.
Serial Advanced Technology Attachment) - szeregowa
magistrala
Serial ATA jest następcą
równoległej magistrali
ATA
. Do transmisji przewidziane są cieńsze i bardziej elastyczne
kable
z mniejszą
ilością styków, co pozwala na stosowanie mniejszych złączy na płycie głównej w porównaniu do równoległej
magistrali
ATA
.
Interfejs
przeznaczony do komunikacji z
przepływnością
150
MB
/
s
, umożliwiający szeregową
transmisję danych między
kontrolerem
a
dyskiem
komputera z
przepustowością
ok. 1,5
Gb
/
s
.
Dodatkowo budowa kabli upraszcza instalację i prowadzenie ich w
obudowie
, co poprawia warunki chłodzenia
wewnątrz obudowy.
Organizacja Serial ATA Working Group pracująca nad tym standardem zakończyła już prace nad jego drugą
wersją (
SATA-2
), która umożliwia dwukrotnie większy transfer niż jej poprzednik. Planowana jest też trzecia
wersja tego interfejsu, która ma umożliwić przesyłanie danych z prędkością 600
MB
/
s
.
15 – pinowa wtyczka zasilająca
7 – pinowa wtyczka kabla do przesyłania danych
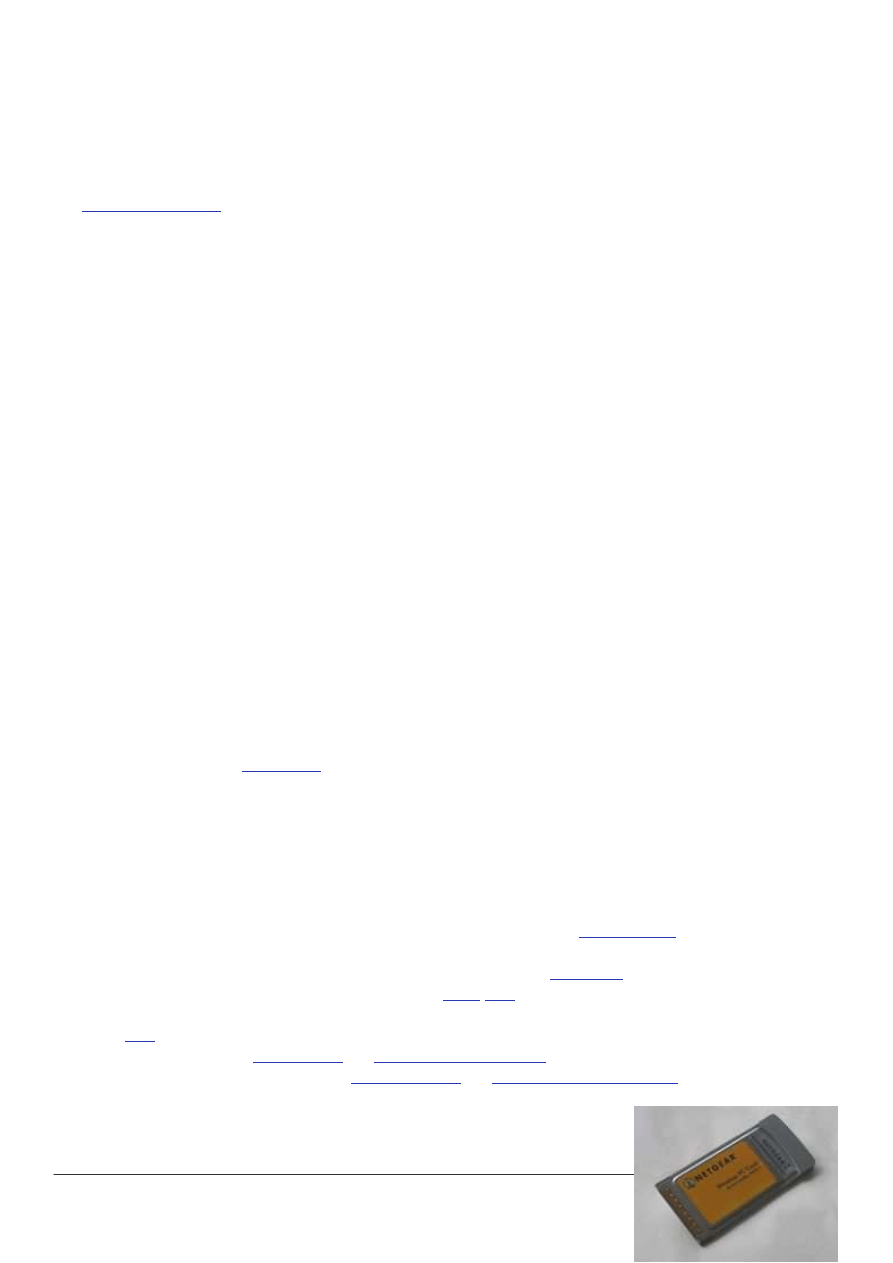
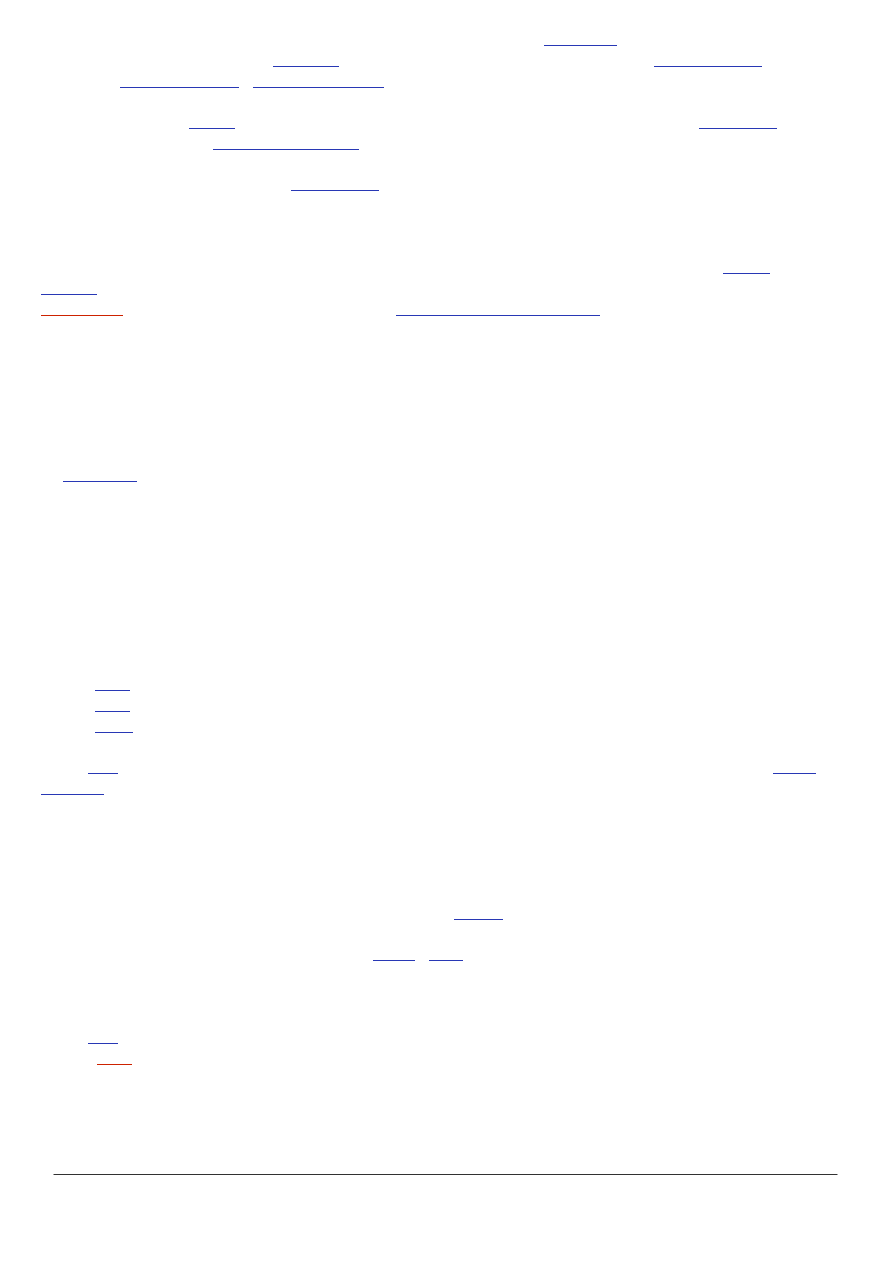
SCSI
SCSI [wym. SKAZI] - skrót z
ang.
Small
Computer Systems Interface - równoległa
magistrala danych
przeznaczona do
przesyłania
danych
między urządzeniami.
Wszystkie urządzenia podłączone do
magistrali są równorzędne, każde z nich może
pełnić rolę zarówno inicjatora (rozpoczynać
operację) jak i celu (wykonywać operację
zleconą przez inicjator). Niektóre
urządzenia
potrafią pełnić tylko jedną z ról.
Kontroler
SCSI-2 ze złączami 50-pin na
karcie rozszerzeń
z
interfejsem
ISA
W znakomitej większości konfiguracji do magistrali poprzez
kontroler
podłączony jest jeden
komputer
oraz
urządzenia
pamięci masowej
(
dyski twarde
oraz
napędy taśmowe
).
Każde z urządzeń podłączonych do magistrali SCSI posiada unikatowy w obrębie magistrali adres -
identyfikator (ang. SCSI ID). Pierwotnie do adresowania urządzeń wykorzystywane były trzy
bity
magistrali co
pozwalało na połączenie ze sobą maksymalnie 8 urządzeń. W chwili gdy magistrala danych rozrosła się do
szerokości 16 bitów została również rozszerzona do 4 bitów część adresująca urządzenia. Identyfikator pełni
PeCetologia str. 3 z 12
również rolę priorytetu przy rozstrzyganiu próby jednoczesnego dostępu więcej niż jednego urządzenia do
magistrali. Zwyczajowo kontroler posługuje się identyfikatorem 7. W obrębie jednego identyfikatora istnieją
również tzw. LUN (ang. Logical Unit Number) identyfikujące tzw. urządzenie logiczne na jakie może być
podzielone urządzenie fizyczne SCSI. Przykładem takiego urządzenia mogą być zmieniarki płyt CD, w których
poszczególne elementy składowe (magazynki, czytniki) mogą być identyfikowane przy pomocy LUN.
Magistrala SCSI pozwala na podłączenie dysku do więcej niż jednego komputera (tzw. układ V). Możliwe jest
również przesyłanie danych bezpośrednio pomiędzy urządzeniami bez ingerencji komputera (np. wykonanie
kopii
macierzy dyskowej
na taśmie magnetycznej).
Magistralę SCSI można podzielić ze względu na kilka kryteriów:
•
sposób transmisji:
o
asynchroniczny
o
synchroniczny
•
prędkość (częstotliwość) transmisji
o
5 MHz
o
10 MHz
o
20 MHz
o
80 MHz
o
160 MHz (przy 16 bitach daje to 320 MB/s)
•
szerokość magistrali
o
8 bitów
o
16 bitów
•
parametry elektryczne
o
sterowanie napięciowe (Single Ended) oznaczane jako SE
o
sterowanie różnicowe (Differential lub High Voltage Diferenetial) - HVD
o
sterowanie różnicowe niskonapięciowe (Low Voltage Differential) - LVD
Wyróżniamy kilka odmian SCSI:
•
SCSI-1: pierwsza wersja standardu. Pozwalała na transfer z prędkością 5 MB/s na odległość 6 m,
•
SCSI-2: kolejna wersja standardu. Składa się z dwóch wariantów, zwiększających transfer do 10 lub 20
MB/s (odpowiednio Fast SCSI i Wide SCSI). Maksymalna odległość to około 3 metry,
•
SCSI-3: znany jako
Ultra SCSI
, prędkość transferu 20-40 MB/s, teoretycznie maksymalna odległość
zostaje nadal 3 metry,
•
Ultra2 SCSI: wprowadzono technologię Low Voltage Differential, pozwalającą na zwiększenia
maksymalnej odległości do ~12 m. Prędkość transferu 40-80 MB/s,
•
Ultra3 SCSI (Ultra160 SCSI): maksymalny transfer 160 MB/s, dodano funkcje wspomagające
wykrywanie i usuwanie przekłamań.
•
Ultra4 SCSI (Ultra320 SCSI): maksymalny transfer 320 MB/s.
Elektryczna budowa magistrali SCSI wymaga zakończenia jej specjalnym
terminatorem
.
System SCSI jest obecnie wykorzystywany głównie w wysokiej klasy
serwerach
i stacjach roboczych. Tańsze
komputery domowe wykorzystują przeważnie standard
ATA
/
IDE
.
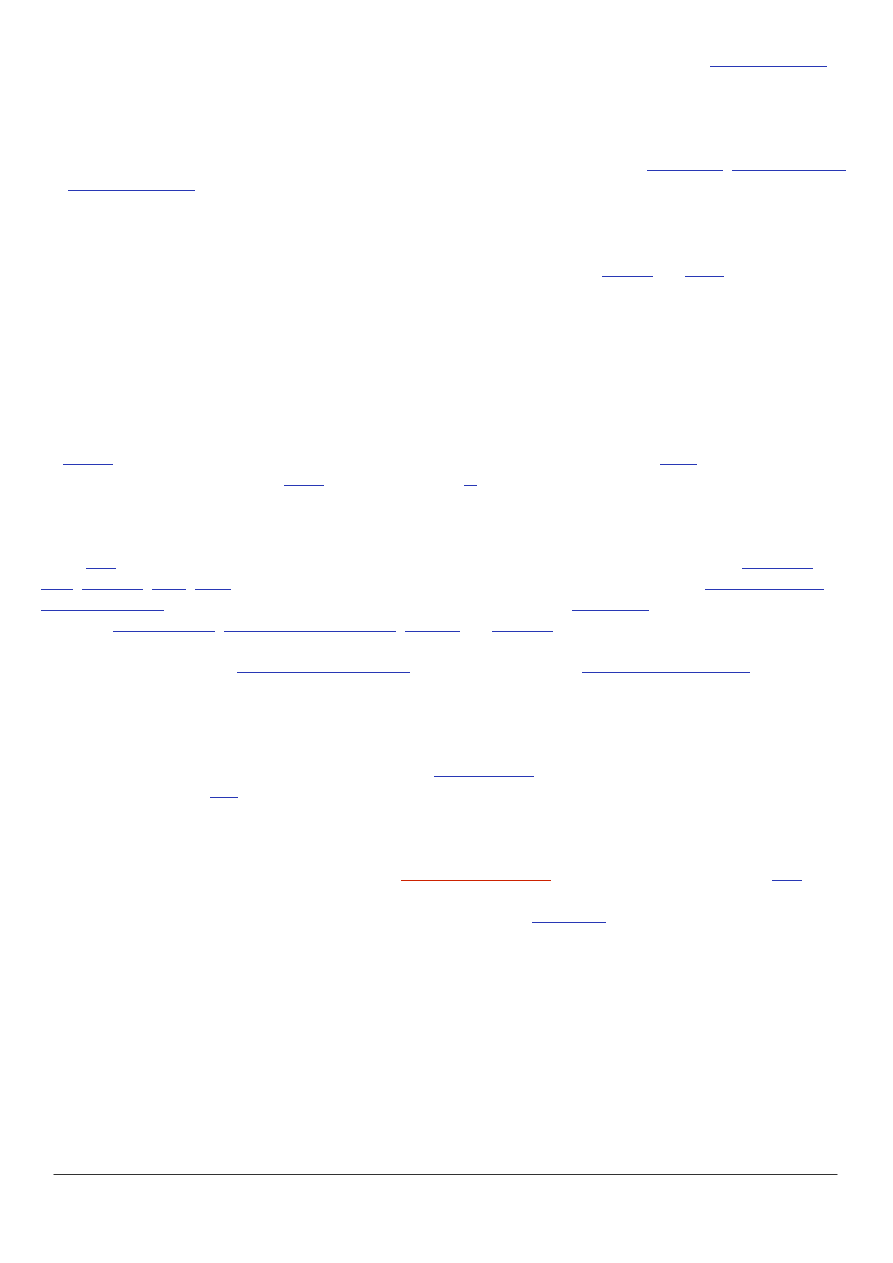
PCMCIA (
ang.
Personal Computer Memory Card International Association) to międzynarodowe
stowarzyszenie producentów
kart pamięci
dla
komputerów osobistych
. Celem organizacji jest wprowadzenie
i rozwijanie międzynarodowego standardu
kart rozszerzeń
dla
komputerów przenośnych
.
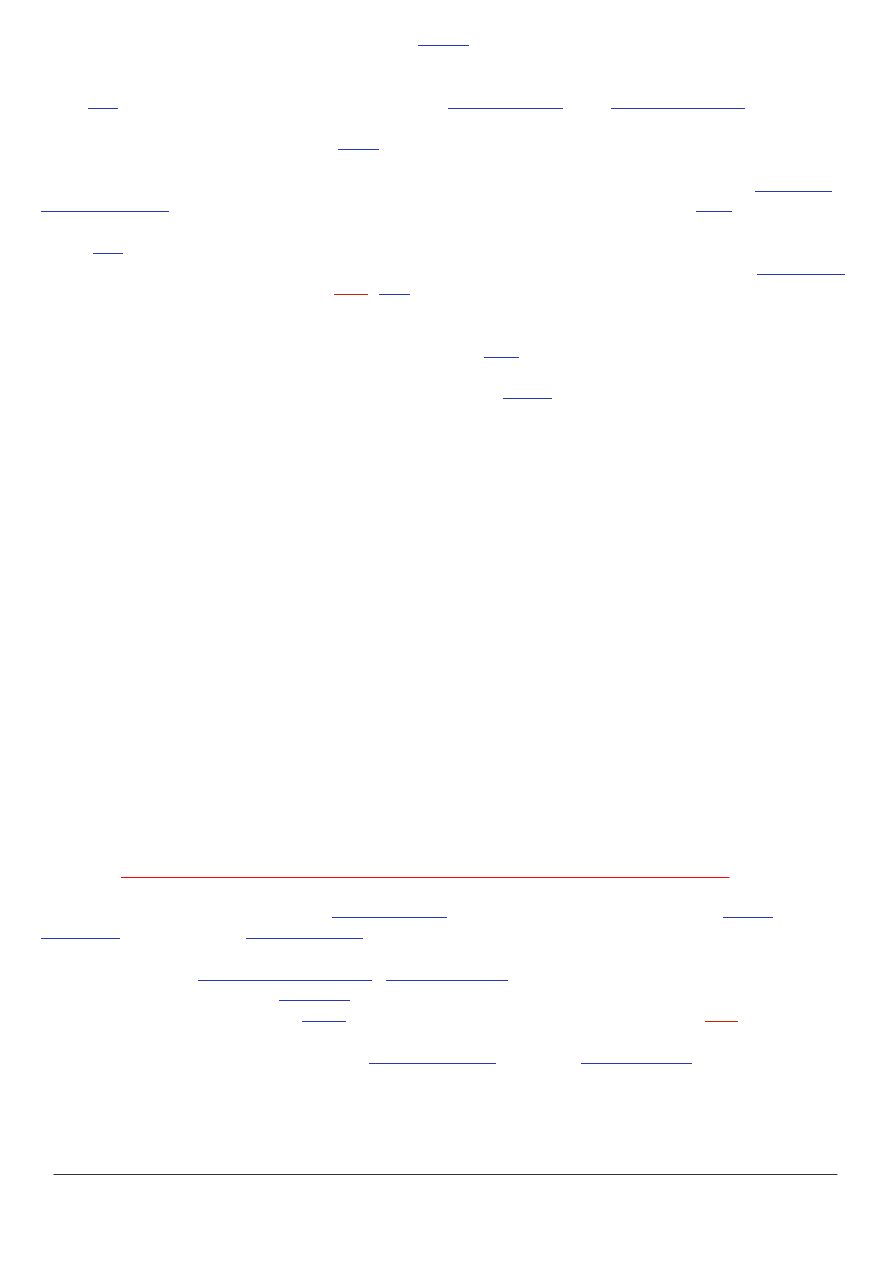
Karty PCMCIA
Karta WLAN-PCMCIA Netgear WG511 802.11b/g, PCMCIA Typ II.
PeCetologia str. 4 z 12
Karty PCMCIA pełnią obecnie funkcje kart rozszerzeń. Celem ich zastosowania jest rozszerzenie
funkcjonalności komputera. Posiadają ustandaryzowane wymiary przypominając wielkością
kartę kredytową
(85,6 × 54 mm). Poszczególne generacje kart przestrzegają powyższego standardu, w swych wymiarach różniąc
się jedynie grubością.
Pierwotnym obszarem zastosowań kart PCMCIA było rozszerzanie pamięci komputera przenośnego. Wraz z
rozwojem technologii obszar ten uległ poważnej ekspansji i obecnie pełnią one rolę
modemów
,
kart sieciowych
lub
dysków twardych
.
Rodzaje kart PCMCIA
•
Karta typu I - karta o grubości 3,3 mm pełniąca funkcje karty pamięci
SRAM
lub
Flash
.
•
Karta typu II - karta o grubości 5,0 mm pełniąca funkcje karty rozszerzeń (modem lub karta sieciowa).
•
Karta typu III - karta o grubości 10,5 mm pełniąca funkcje karty rozszerzeń (dysk twardy).
Montaż kart PCMCIA umożliwia gniazdo PCMCIA.
Gniazdo PCMCIA
Umożliwia łatwy montaż kart PCMCIA w komputerach przenośnych. Pierwsze gniazda PCMCIA zapewniały
16
bitowy
przepływ danych. Obecnie jest on 32 bitowy i pracuje z częstotliwością 33
MHz
(zapewniając
maksymalny transfer danych 133
MB/s
) przy napięciu 3,3
V
.
USB
(
ang.
Universal Serial Bus - uniwersalna magistrala szeregowa) to opracowany przez firmy
Microsoft
,
Intel
,
Compaq
,
IBM
,
DEC
rodzaj portu komunikacyjnego komputerów, zastępującego stare
porty szeregowe
i
porty równoległe
. Port USB jest uniwersalny, pozwala na podłączanie do
komputera
wielu urządzeń, na
przykład:
kamery wideo
,
aparatu fotograficznego
,
skanera
lub
drukarki
.
Większość współczesnych
systemów operacyjnych
obsługuje złącze USB.
Microsoft Windows 95
od wersji
OSR2 (istnieje także poprawka do wersji OSR1 udostępniająca obsługę USB).
Praca w sieci
Jedną z ważniejszych cech portu USB jest zgodność z
Plug and Play
. Urządzenia w tym standardzie można
łączyć ze sobą tworząc
sieć
. W całej sieci można podłączyć do 127 urządzeń USB, jednak ze względu na pobór
mocy ich liczbę trzeba ograniczyć. W jednej sieci mogą pracować urządzenia o różnych prędkościach
transmisji.
Magistrala wymaga obecności dokładnie jednego
kontrolera magistrali
, którego rolę pełni komputer (
host
).
Uniemożliwia to bezpośrednie połączenie dwóch komputerów (wymagany przewód ze specjalnym układem)
oraz bezpośrednie połączenie ze sobą urządzeń peryferyjnych (brak
kontrolera
)
Typy i prędkości
Urządzenia USB możemy podzielić ze względu na zgodność z przyjętymi specyfikacjami na:
•
1.1 Urządzenia spełniające warunki tej specyfikacji mogą pracować z prędkościami 1.5 Mbit/s lub 12
Mbit/s
•
2.0 Urządzenia zgodne z warunkami nowej specyfikacji mogą pracować z prędkością 480 Mbit/s
Na opakowaniach produktów można znaleźć oznaczenia USB 2.0 i podobne, ważniejszą informacją jest jednak
szybkość transmisji.

PeCetologia str. 5 z 12
•
Full Speed
- 12 Mbit/s największa prędkość przed USB 1.1
•
Hi-Speed
- 480 Mbit/s - dostępne w USB 2.0 - urządzenia działające z tą prędkością powinny mieć
nalepkę
Hi-Speed
Typy złącz USB
Wtyczka USB typu A
Wtyczka USB typu B
Piny wtyczek standardowych
Wtyczka mini-USB
Piny wtyczek mini
Wtyczka USB typu A - grafika w formacie
SVG
Transmisja elektryczna
Transmisja odbywa się przy wykorzystaniu dwóch przewodów (zielonego Data+ i białego Data-). Magistrala
zawiera również linię zasilającą (czerwony (+5
VDC
) i czarny (
masa
) przewód) o napięciu 5 V i maksymalnym
poborze prądu 0,5 A. W starszych płytach głównych występuje zamiast czterech pięć styków dla każdego
gniazda USB, piąty styk należy połączyć z czarnym przewodem
GND
płytki z gniazdem.
Przewód
Nr
Sygnał
Opis
czerwony
1
VDC lub VCC
zasilanie +5
V
(maks. 0,5
A
)
biały albo żółty
2
transmisja danych D-
zielony
3
transmisja danych D+
czarny
4
GND
masa
Kontroler USB
Jest
kartą rozszerzeń
umożliwiająca podłączanie urządzeń korzystających z interfejsu USB do komputerów nie
posiadających tego złącza. Karty takie występują w różnych wersjach w zależności od ilości portów i ich
rodzaju (USB 1.1 lub USB 2.0).
BIOS (akronim
ang.
Basic Input/Output System - podstawowe procedury wejścia-wyjścia) to zapisany w
pamięci stałej, inny dla każdego typu
płyty głównej
komputera
, zestaw podstawowych procedur
pośredniczących pomiędzy
systemem operacyjnym
a sprzętem. Program konfiguracyjny BIOS-a to
BIOS setup
.
PeCetologia str. 6 z 12
Program zapisany w pamięci
ROM
(Read Only Memory - pamięć tylko do odczytu) płyty głównej oraz innych
urządzeń takich jak
karta graficzna
. W wypadku płyty głównej BIOS testuje sprzęt po włączeniu komputera,
przeprowadza tzw.
POST
(akronim
ang.
"Power On Self Test"), zajmuje się wstępną obsługą urządzeń
wejścia/wyjścia, kontroluje transfer danych pomiędzy komponentami takimi jak
dysk twardy
,
procesor
czy
napęd
CD-ROM
. Inicjuje
program rozruchowy
. BIOS potrzebny jest w
komputerach osobistych
ze względu na
architekturę
płyt głównych
, gdzie dzięki
ACPI
kontroluje zasilanie, a poza tym monitoruje temperaturę itp.
Za pomocą wbudowanego w BIOS programu setup można zmieniać standardowe ustawienia BIOS-u, np.
parametry podłączonych dysków twardych lub zachowanie się komputera po jego włączeniu (np. szybkość
testowania pamięci
RAM
), a także włączać/wyłączać niektóre elementy płyty głównej, np.
porty
komunikacyjne
. Za pomocą BIOS-u można też przetaktowywać procesor (zmiana
częstotliwości
i
mnożnika
),
jednak nie jest to zalecane, ponieważ może doprowadzić do przeciążenia urządzenia, a nawet jego uszkodzenia.
Obecnie większość BIOS-ów zapisywana jest w pamięciach typu
Flash
, co umożliwia ich późniejszą
modyfikację.
Sektor rozruchowy jest obszarem obejmującym najczęściej pierwsze 512 bajtów
dysku twardego
,
dyskietki
,
podobnego nośnika danych lub samej
partycji
. Każda partycja posiada sektor rozruchowy, natomiast cały dysk
posiada
Główny Sektor Rozruchowy (MBR)
. Sektor rozruchowy partycji może posiadać własny
program
rozruchowy
, co wykorzystuje program
NT OS Loader
służący do uruchamiania systemów operacyjnych z
rodziny
Windows NT
, z wyjątkiem Windows Vista. Program rozruchowy zawarty w sektorze rozruchowym
partycji może zostać wykonany tylko po przekazaniu mu sterowania przez program rozruchowy zawarty w
MBR-ze, ponieważ
BIOS
umie uruchamiać program rozruchowy tylko z MBR-u.
Ź
ródło: "
http://pl.wikipedia.org/wiki/Sektor_rozruchowy
"
Program rozruchowy (
ang.
boot loader) to program uruchamiany jako pierwszy po wykonaniu początkowego
programu BIOS-u (lub EFI). Służy do załadowania systemu operacyjnego do
pamięci operacyjnej
. Wiele ma
także funkcje
menedżera uruchamiania
(pozwala wybrać system do uruchomienia).
Nagłówek (segment startowy) programu rozruchowego w komputerach PC może być umieszczony w
pierwszym, 446-bajtowym fragmencie
sektora MBR
dysku twardego
. W systemach DOS/Win32 jest tam
zapisany program, który ładuje kolejny program rozruchowy z partycji oznaczonej jako aktywna. W
systemach
uniksowych
pliki dodatkowe programu rozruchowego znajdują się zazwyczaj w katalogu lub partycji
montowanej
w
katalogu
/boot.
Program rozruchowy oraz cały system operacyjny może być pobierany także z innych urządzeń takich jak
stacja
dyskietek
, napęd
CDROM
, dyski
USB
a nawet spoza komputera, z serwera w
sieci lokalnej
(zob.
PXE
).
PXE (
ang.
Preboot Execution Environment) – rozwiązanie w technice komputerowej, umożliwiające
uruchomienie na
komputerze
systemu operacyjnego
, mimo że nie jest on na nim zainstalowany, a nawet gdy
komputer nie posiada żadnych urządzeń mogących taki system przechowywać, takich jak
dysk twardy
, stacja
dyskietek
, napęd
CDROM
, dyski
USB
, czy inne. PXE to tryb pracy, w którym komputer wyposażony w
specjalną
kartę sieciową
łączy się z
serwerem
obsługującym protokoły
DHCP
i
TFTP
, i z niego pobiera
system
operacyjny
.
Działanie PXE składa się z kilku etapów.
•
Po włączeniu komputera uruchamia się procedura startowa
BIOS
z pamięci karty sieciowej (zazwyczaj
jest to pamięć typu Flash). Program ten próbuje znaleźć w
lokalnej sieci
serwer
DHCP
.
•
Od serwera otrzymuje swój
adres IP
oraz nazwę pliku z programem, przechowywanego na serwerze.
•
Otrzymawszy adres IP, PXE pobiera z serwera protokołem
TFTP
wskazany plik. Procedura startowa ma
do dyspozycji bardzo mało pamięci, dlatego pobierany plik nie zawiera systemu operacyjnego, a jedynie
krótki program rozruchowy (ang.
bootstrap
,
boot loader
).
PeCetologia str. 7 z 12
•
Po uruchomieniu
program rozruchowy
pobiera z serwera TFTP dalsze pliki z systemem operacyjnym,
rozmieszcza je w
pamięci
komputera i przeprowadza właściwy start
systemu operacyjnego
.
NT OS Loader (NTLDR New Technology Loader) to
program rozruchowy
służący przede wszystkim do
ładowania
systemów
Microsoft Windows NT
,
2000
,
XP
lub
Server 2003
. Kod umieszczony w
sektorze
rozruchowym
pierwszej partycji (nie w
MBR-ze
) wczytuje do pamięci program NTLDR, który po odczytaniu
pliku BOOT.INI wyświetla menu wyboru systemu lub od razu uruchamia Windows. Zależy to od liczby
wpisów w BOOT.INI.
NT OS Loader potrafi również odczytać bootsektor z
pliku
. Dzięki temu można załadować inny program
rozruchowy (np.
LILO
) lub system operacyjny.
GRUB (z
ang.
GRand Unified Bootloader) to
program rozruchowy
. Za jego pomocą można uruchomić wiele
systemów operacyjnych
(np.
Linux
,
FreeBSD
,
Windows
,
Windows NT
,
DOS
, i innych). GRUB potrafi
odczytywać bardzo wiele
systemów plików
między innymi:
ext2
,
minix
,
FAT
,
FFS
,
ReiserFS
,
XFS
,
JFS
. W ten
sposób można załadować
jądro systemu operacyjnego
oraz ewentualne wirtualny dysk startowy (
initrd
).
Dodatkowo GRUB potrafi ładować systemy bezpośrednio z urządzenia.
GRUB obsługuje zabezpieczenia hasłem uruchamiania dowolnego systemu operacyjnego lub możliwości
uruchomienia
powłoki
. Dla haseł obliczana jest suma
MD5
co powoduje trudności w odgadnięciu hasła nawet,
gdy przez przypadek mamy do dyspozycji sumę kontrolną.
LILO (LInux LOader) to
program rozruchowy
Linuksa
. LILO w
informatyce
jest także skrótem od Last In
Last Out (co jest równoznaczne z
FIFO
).
LILO nie jest zależne od żadnego
systemu plików
, potrafi załadować
jądro systemu operacyjnego
Linux
zarówno z
dyskietki
jak i z
dysku twardego
. Program obsługuje od 1 do 16 różnych
obrazów jądra
. Różne
parametry startowe (takie jak urządzenie z którego należy
zamontować
główny system plików
) mogą być
ustawiane niezależnie dla każdego jądra. LILO może zostać zainstalowany jako główny program rozruchowy w
MBR
lub w
boot sektorze
aktywnej
partycji
.
LILO był kiedyś najbardziej rozpowszechnionym programem rozruchowym Linuksa, ale ostatnio jego
popularność maleje. Znaczna część użytkowników wybiera
GRUB-a
doceniając jego ogromne możliwości.
loadlin -
bootloader
ładujący
Linuksa
poprzez
DOS
lub
Microsoft Windows
. Po uruchomieniu, loadlin
zatrzymuje uruchomiony system, tworzy
ramdysk
i ładuje kernel i jego moduły do tego
ramdysku
. Wtedy
kernel bootuje i kontynuuje na partycji z loadlinem.
Ta metoda może być wykorzystywana jeżeli użytkownik nie chce lub nie może modyfikować
MBR
.
loadlin nie ma wpływu na sektor MBR, zainstalowany bootloader czy twardy dysk. Wymaga jednak
uruchomionego środowiska DOS lub Windows.
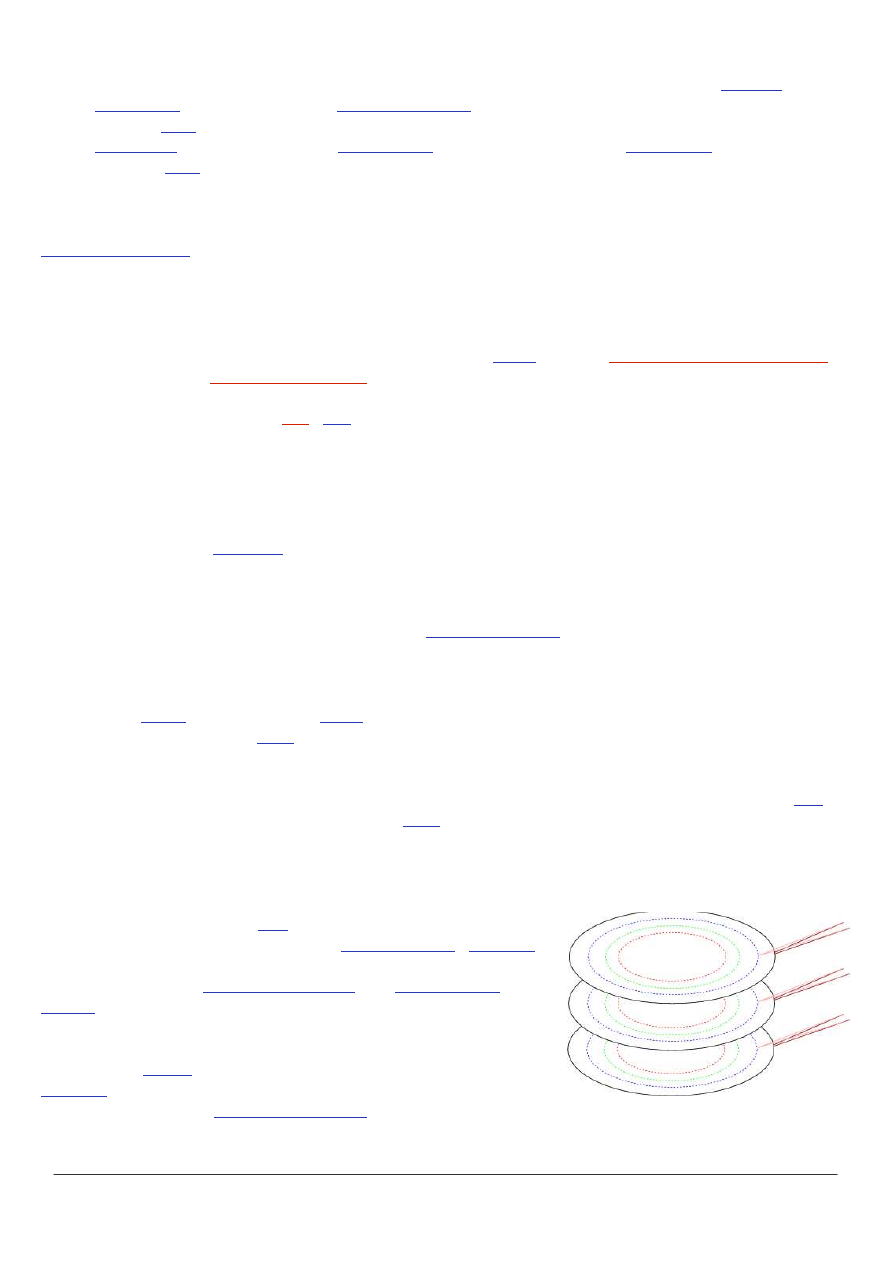
Dysk twardy
Dysk stały składa się z zamkniętego w hermetycznej obudowie, wirującego talerza (dysku) lub zespołu talerzy,
wykonanych najczęściej ze
stopów
aluminium
, o wypolerowanej powierzchni pokrytej nośnikiem
magnetycznym (grubości kilku
mikrometrów
) oraz z
głowic elektromagnetycznych
umożliwiających zapis i
odczyt danych. Na każdą powierzchnię talerza dysku przypada po jednej głowicy odczytu i zapisu. Głowice są
umieszczone na elastycznych ramionach i w stanie spoczynku stykają się z talerzem blisko osi, w czasie pracy
unoszą się, a ich odległość nad talerzem jest stabilizowana dzięki sile aerodynamicznej (głowica jest odpychana
od talerza podobnie jak skrzydło samolotu unosi samolot) powstałej w wyniku szybkich obrotów talerza. Jest to
najpopularniejsze obecnie rozwiązanie (są też inne sposoby prowadzenia głowic nad talerzami).
PeCetologia str. 8 z 12
Ramię głowicy dysku ustawia głowice w odpowiedniej odległości od
osi obrotu
talerza w celu odczytu lub
zapisu danych na odpowiednim
cylindrze
. Pierwsze konstrukcje były wyposażone w
silnik krokowy
, stosowane
również w
stacjach dysków
i
stacjach dyskietek
. Wzrost liczby cylindrów na dysku oraz konieczność
zwiększenia szybkości dysków wymusił wprowadzenie innych rozwiązań. Najpopularniejszym obecnie jest
tzw. voice coil czyli
cewka
, wzorowana na układzie magnetodynamicznym stosowanym w
głośnikach
.
Umieszczona w silnym
polu magnetycznym
cewka porusza się i zajmuje położenie zgodnie z przepływającym
przez nią prądem, ustawiając ramię w odpowiedniej pozycji. Dzięki temu czas przejścia między kolejnymi
ś
cieżkami jest nawet krótszy niż 1
milisekunda
a przy większych odległościach nie przekracza kilkudziesięciu
milisekund. Układ regulujący prądem zmienia natężenie prądu, tak by głowica ustabilizowała jak najszybciej
swe położenia w zadanej odległości od środka talerza (nad wyznaczonym cylindrem).
Informacja jest zapisywana na dysk przez przesyłanie strumienia elektromagnetycznego przez
antenę
albo
głowicę
zapisującą, która jest bardzo blisko magnetycznie polaryzowalnego materiału, zmieniającego swoją
polaryzację
(kierunek namagnesowania) wraz ze
strumieniem magnetycznym
. Informacja może być z
powrotem odczytana w odwrotny sposób, gdyż zmienne pole magnetyczne powoduje indukowanie napięcia
elektrycznego w cewce głowicy lub zmianę oporu w głowicy magnetyczno oporowej.
Ramiona połączone są zworą i poruszają się razem. Zwora kieruje głowicami promieniowo po talerzach a w
miarę rotacji talerzy, daje każdej głowicy dostęp do całości jej talerza.
Zintegrowana elektronika kontroluje ruch zwory, obroty dysku, oraz przygotowuje odczyty i zapisy na rozkaz
od
kontrolera
dysku. Niektóre nowoczesne układy elektroniczne są zdolne do skutecznego szeregowania
odczytów i zapisów na przestrzeni dysku oraz do remapowania sektorów dysku, które zawiodły.
Szczelna obudowa chroni części napędu od pyłu, pary wodnej, i innych źródeł zanieczyszczenia. Jakiekolwiek
zanieczyszczenie głowic lub talerzy może doprowadzić do uszkodzenia głowicy (head crash), awarii dysku, w
której głowica uszkadza talerz, ścierając cienką warstwę magnetyczną. Awarie głowicy mogą również być
spowodowane przez błąd elektroniczny, zużycie i zniszczenie, błędy produkcyjne dysku.
Sposoby adresowania danych na dysku
•
CHS
(cylinder, head, sector)
•
LBA
(Logical Block Adressing)
•
MZR
(Multiple Zone Recording)
CHS (
ang.
Cylinder-Head-Sector, czyli cylinder-głowica-sektor) jest metodą adresowania danych na
dysku
twardym
.
Każdy dysk twardy zawiera talerze i głowice do odczytu i zapisu. Głowice znajdują się po obydwu stronach
talerza tzn. jeżeli dysk zawiera 2 talerze to posiada 4 głowice. Każdy talerz podzielony jest na ścieżki. Wartość
cylindrów określa ilość ścieżek znajdujących się po każdej ze stron talerza. Pojedynczy cylinder jest więc
zbiorem ścieżek będących jedna nad drugą (jest ich tyle samo co głowic). Wartość sektorów określa ilość
sektorów w każdym cylindrze, każdy sektor zawiera 512
bajtów
.
Starsze dyski twarde stosujące metody zapisu
MFM
i
RLL
, dzieliły każdy cylinder na równą ilość sektorów a
wartości CHS odpowiadały fizycznej budowie dysku. Dysk z wartościami CHS 500x4x32 posiadał 500 ścieżek
po każdej stronie talerza, 2 talerze, i 32 sektory na cylinder.
Dyski
IDE
, które zastąpiły dyski z metodami zapisu MFM i RLL używają efektywniejszej metody zapisu
danych
ZBR
. Przy metodzie zapisu Zone Bit Recording liczba sektorów w cylindrze zależy od jego położenia
na dysku. Cylindry bliżej krawędzi talerza zawierają więcej sektorów niż te bliżej środka talerza. Adresowanie
CHS nie działa na tych dyskach z powodu zróżnicowanej ilości sektorów w cylindrach.
PeCetologia str. 9 z 12
Każdy dysk IDE można dowolnie skonfigurować w
CMOS
, byle ustawienia CHS nie przekraczały pojemności
dysku. Dysk przekonwertuje podane adresowanie CHS na adresowanie specyficzne dla konfiguracji sprzętowej.
LBA (
ang.
Logical Block Addressing) - metoda obsługi
dysku twardego
przez
system operacyjny
.
Dla pokonania granicy 528 MB standard
EIDE
wykorzystuje metodę LBA, która powoduje przenumerowanie
wszystkich sektorów, tzn. dokonuje tzw. translacji adresów, czyli zamiany rzeczywistych numerów głowicy,
cylindra i sektora na ich logiczny odpowiednik; odpada więc skomplikowana adresacja za pomocą
cylindrów,
głowic i sektorów
(CHS). Metoda ta funkcjonuje w każdym systemie operacyjnym oprócz
DOS
-a.
MZR (
ang.
Multiple Zone Recording, czyli nagrywanie wieloma strefami) - technika formatowania i określania
lokacji sektorów danych na fizycznej przestrzeni takich nośników magnetycznych, jak na przykład
dysk twardy
.
Technika ta wywodzi się z mechanizmu
ZBR
(
ang.
Zone Bit Recording), nie jest jednak dostrzegalna z punktu
widzenia interfejsu urządzenia.
W klasycznym modelu dysku twardego, opartym o adresację
CHS
, dane zapisywane są wzdłuż cylindrycznych
ś
cieżek. Każda ścieżka zawiera w sobie fragmenty, należące do dokładnie takiej samej liczby sektorów. Jest to
jednak negatywne zjawisko, ponieważ - przy takiej samej ilości
bajtów
zapisanych w określonym sektorze, na
wyznaczonej ścieżce - zewnętrzne obszary dysku nie są w pełni wykorzystane. Zawierają one taką samą ilość
danych, jak obszary bliższe środkowi nośnika, a przecież są od nich znacznie dłuższe.
Technika MZR pozwala zapobiec temu niekorzystnemu zjawisku. Sąsiadujące ścieżki dysku są zebrane w
grupach, których ilość zależy od producenta i serii dysku (zwykle od 3 do 20). W ramach grupy wszystkie
ś
cieżki mają dokładnie taką samą ilość sektorów. Im grupa jest położona bliżej zewnętrznej krawędzi nośnika,
tym jej ścieżki mają więcej sektorów. Czasem grupy tworzone są według zasady, że ścieżka, która jest w stanie
pomieścić o jeden sektor więcej niż poprzednia, rozpoczyna nową grupę. Jednak przy dyskach o bardzo dużych
gęstościach zapisu reguła ta traci na znaczeniu, gdyż często każda ścieżka jest w stanie pomieścić więcej
sektorów niż poprzednia.
Multiple Zone Recording ma jeszcze jedną, bardzo ważną zaletę. Głowica, przeniesiona nad zewnętrzne
obszary nośnika, jest w stanie w tym samym czasie odczytać znacznie więcej sektorów niż przy krawędzi
wewnętrznej. W klasycznym modelu ilość ta jest dokładnie taka sama. Przy wykorzystaniu MZR, głowica
częściej znajduje się przy zewnętrznych obszarach dysku, bo jest tam wykonywanych więcej odczytów i
zapisów, a co za tym idzie, dane z obszarów zewnętrznych (najliczniejsze) są dla głowicy najszybciej dostępne.
Z punktu widzenia obsługi takiego urządzenia, technologia MZR nie wpływa w żaden sposób na komunikację
zewnętrzną, gdyż za zamianę klasycznej adresacji sektorów na adresację zgodną z MZR odpowiada
elektroniczny układ sterowania wbudowany w dysk twardy. Jednak zmiana szybkości transferu może być
wyraźnie zauważalna.
Partycja
- logiczny, wydzielony obszar
dysku twardego
, który może być sformatowany przez
system
operacyjny
w odpowiednim
systemie plików
.
Rozmaici producenci
systemów operacyjnych
i
oprogramowania
stosują różną terminologię, często z powodów
kulturowo-marketingowych (np.
Microsoft
nazywa ją dyskiem lokalnym), oraz z powodów techniczno-
technologicznych (np. w systemach
*BSD
zamiast określenia partycja używa się określenia
slice
).
Partycjonowanie umożliwia posiadanie kilku
systemów plików
na jednym
dysku twardym
. Powodem
partycjonowania mogą być:
PeCetologia str. 10 z 12
•
ograniczenia techniczne (np. stare wersje
FAT
mają ograniczenia co do wielkości partycji, stare
biosy
nie mogą zaadresować obszaru poza 1024
cylindrem
, więc partycja startowa musi znajdować się przed
tą granicą)
•
uszkodzenie danych na jednej partycji nie ma wpływu na inne partycje
•
często systemy operacyjne nie mogą być zainstalowane na jednej partycji lub używają innego systemu
plików. Wtedy instaluje się je na oddzielnych partycjach.
•
by zapobiec zapełnieniu dysku przez określoną usługę, można jej dane umieścić na oddzielnej partycji
(np. logi systemowe).
•
każda partycja może być dostosowana do konkretnych wymagań. Np. jeśli zapis na partycje ma być
zabroniony można ją
zamontować
jako tylko do odczytu. Jeśli na partycji ma się znajdować wiele
plików można użyć systemu plików z wieloma
i-węzłami
.
Tablica partycji w komputerach PC
Tablica partycji w architekturze PC została wprowadzona wraz z pojawieniem się dysków twardych w
1982
. W
1987
wraz z DOS 3.3 format tablicy partycji został rozszerzony o tablice rozszerzoną na której mogły się
znajdować logiczne partycje.
Specyfikacja
Tablica partycji (
ang.
partition table) – jest przechowywana w
master boot rekordzie
pierwszego sektora
dysku twardego. Struktura ta zajmuje 64 bajty w której są 4 wpisy (po 16 bajtów każdy)
Master Boot Record
(offset)
0x0000 do 0x01BD - pierwsze 446 bajty
0x01BE do 0x01CD - partycja 1
0x01CE do 0x01DD - partycja 2
0x01DE do 0x01ED - partycja 3
0x01EE do 0x01FD - partycja 4
0x01FE do 0x01FF - Boot signature
Każdy wpis w tablicy partycji ma następujący układ:
|==========================================================|
| Numer bajta| Opis |
|==========================================================|
| 1 | flaga aktywno
ś
ci |
|==========================================================|
| 3 | startowy CHS |
|==========================================================|
| 1 | typ partycji |
|==========================================================|
| 3 | ko
ń
cowy CHS |
|==========================================================|
| 4 | sektor pocz
ą
tkowy |
|==========================================================|
| 4 | liczba sektorów partycji |
|==========================================================|
Przykładowa tablica partycji: (wszystkie bajty są w formacie
little endian
)
offset: value explanation
======: ===== ===========
0x01BE: 0x80 flaga aktywno
ś
ci
0x01BF: 0x00 0x02 0x00 startowy CHS
0x01C2: 0x83 typ partycji
0x01C3: 0x1A 0x5B 0x8C ko
ń
cowy CHS
0x01C6: 0x02 0x00 0x00 0x00 sektor pocz
ą
tkowy
0x01CA: 0x00 0x35 0x0C 0x00 liczba sektorów partycji
PeCetologia str. 11 z 12
Znaczenie poszczególnych pól
•
flaga aktywności – określa tzw. aktywną partycję, czyli partycję, z której standardowy
program
rozruchowy
powinien załadować
system operacyjny
. Tylko jedna partycja może mieć ustawioną tą flagę
•
startowy
CHS
– adres początku partycji w notacji cylinder, głowica, sektor
•
typ partycji
– określa typ partycji
podstawowej
lub oznacza partycję jako
rozszerzoną
•
końcowy
CHS
– adres końca partycji
•
sektor początkowy – adres pierwszego sektora
•
liczba sektorów – liczba sektorów należących do partycji
Partycja rozszerzona
pozwala na założenie więcej niż 4 partycji na dysku.
Inne implementacje partycjonowania
Popularyzacja architektury IBM PC sprawiła, że tablica partycji będzie używana przez najbliższy czas. Pojawił
się jednak nowy projekt firm Intel i Microsoft dla architektury
IA-64
nazwany
Extensible Firmware Interface
(EFI) zawiera składnik
GUID Partition Table
(GPT). Microsoft dodał wsparcie dla GPT w Windows Server
2003 SP1 i wszystkich innych wariantach Windows x64 (bazujących na Windows Server 2003 SP1). GPT nie
jest wspierane przez architektury
x64
i
x86
więc nie może być użyty na tych platformach.
Schematy partycjonowania
Microsoft Windows
W systemach z rodziny
Windows
standardowym schematem partycjonowania jest stworzenie pojedynczej
partycji będącej dyskiem C:, na którym jest przechowywany system operacyjny, dane i programy. Zalecane jest
stworzenie kilku partycji lub użycie kilku dysków twardych, gdzie na jednej partycji znajduje się system
operacyjny, a na pozostałych programy i dane. Jeśli jest to możliwe plik wymiany powinien znajdować się na
oddzielnej partycji dysku, na którym nie znajduje się
system operacyjny
.
UNIX
W systemach
UNIX
-owych takich jak
Linux
bezpiecznie jest stworzyć oddzielne partycje dla /, /boot, /home,
/tmp, /usr, /var, /opt i partycji
swap
. Dzięki temu mamy pewność, że nawet jeśli jeden system plików zostanie
uszkodzony nie spowoduje on uszkodzenia danych na innych partycjach, minimalizując utratę danych. Wadą
takiego rozwiązania jest konieczność podziału dysku na małe części o ustalonej wielkości. Dobranie ich
wielkości jest czasami bardzo trudnym zadaniem. Typowy system typu desktop używa jednej partycji / (
root
)
zawierającej cały system operacyjny oraz partycji
swap
. Oddzielna partycja /home jest przydatna podczas
reinstalacji systemu pozwalając na zachowanie danych użytkowników.
Master Boot Record, MBR
(
ang.
główny rekord startowy) – umowna
struktura zapisana w pierwszym sektorze
dysku twardego
i
dyskietki
.
Często nazywany też Master Boot Block (ang. główny blok
startowy). Zawiera on
program rozruchowy
oraz
główną tablicę
partycji
(w przypadku dysku twardego – dyskietki zwykle nie
posiadają tablicy partycji).
MBR ma 512
bajtów
długości, z czego pierwsze 446 bajtów zajmuje
bootstrap
. Druga część MBR – tablica partycji – zawiera 4 struktury
opisujące poszczególne
partycje podstawowe
, każda po 16 bajtów. MBR kończą 2 bajty sygnatury –
szesnastkowo 0x55AA, co daje 446 + (4 · 16) + 2 = 512.
PeCetologia str. 12 z 12
MBR znajduje się na pierwszej ścieżce, w pierwszym cylindrze, w pierwszym sektorze dysku (
CHS
— 0, 0, 1).
Budowa MBR
000…445 446…509
510…511
bootstrap partycja 1 partycja 2 partycja 3 partycja 4 0x55 0xAA
Informacje zawarte w MBR można edytować, np. za pomocą programu
MBRtool
. Program pozwala także na
wykonanie kopii MBR na dyskietce.
Wyszukiwarka
Podobne podstrony:
sprawko pbm, Szkoła, Semestr 2, Podstawy Budowy Maszyn I, PBM'y
Część I, Szkoła, Semestr 2, Podstawy Budowy Maszyn I, Spawanko, Spawanie, Sprawko Spawanie, Sprawko
spawanie do wydruku, Szkoła, Semestr 2, Podstawy Budowy Maszyn I, Spawanko, Spawanie, Sprawko Spawan
Laboratoria z techniki pomiarowej, tech.pom., LABORATORIUM PODSTAW BUDOWY URZĄDZEŃ TRANSPORTOWYCH
Podstawy budowy raportów w Oracle Reports 2 5 ćwiczenia Materiały Szkoleniowe
Tabela pomiarów dla blachy 0, Szkoła, Semestr 2, Podstawy Budowy Maszyn I, Spawanko, Spawanie, Spraw
Podstawy budowy komórki roślinnej
Podstawy budowy ciał stałych
04 SPAWALNICTWO, Szkoła, Semestr 2, Podstawy Budowy Maszyn I, PBM'y
04 SPAWALNICTWO OLO, Szkoła, Semestr 2, Podstawy Budowy Maszyn I, PBM'y
04 SPAWALNICTWO WZ R, Szkoła, Semestr 2, Podstawy Budowy Maszyn I, PBM'y
Laboratoria z techniki pomiarowej, Cw2LO1, LABORATORIUM PODSTAW BUDOWY URZĄDZEŃ TRANSPORTOWYCH
ERGOnomia, Oswietlenie 1, Zakład Podstaw Budowy Urządzeń Transportowych
Moje SPAWALNICTWO, Szkoła, Semestr 2, Podstawy Budowy Maszyn I, PBM'y
Część II, Szkoła, Semestr 2, Podstawy Budowy Maszyn I, Spawanko, Spawanie, Sprawko Spawanie, Sprawko
Podstawy budowy i działania sieci komputerowych
więcej podobnych podstron