1
Politechnika Świętokrzyska
Wydział Mechatroniki i Budowy Maszyn
Laboratorium Silników Cieplnych
1
Dr inż. Piotr Łagowski

2
Rozwój
algorytmów
diagnostycznych
wywodzi
się
od
pierwszych systemów diagnostyki pokładowej nazwanych OBD I
(ang. - On Board Diagnosis). Wprowadzony po raz pierwszy w 1984 w
USA.
W systemie tym istnieją nastepujące procedury sprawdzające:
poziom sygnałów elektrycznych pochodzących od czujników
pokładowych,
wartości parametrów programu sterowania,
poziom sygnałów elektrycznych układów wykonawczych.
Przeprowadzana jest również autokontrola kodu programu
sterującego (polegająca na zliczaniu sumy bajtów wchodzących w skład
pamięci stałej sterownika). System alarmuje kierowcę samochodu o
wystąpieniu pogorszenia się stanu technicznego pewnych elementów
systemu sterowania.
Kryteria określające próg wystąpienia rejestracji błędu każdego z
elementów ustala na takim poziomie, że jego przekroczenie rejestrowane
jest
w
systemie
samodiagnostyki
jako
błąd w postaci kodu
diagnostycznego. Wykrycie błędu sygnalizowane jest poprzez zapalenie
się lampki ostrzegawczej, znajdującej się na kokpicie kierowcy.

3
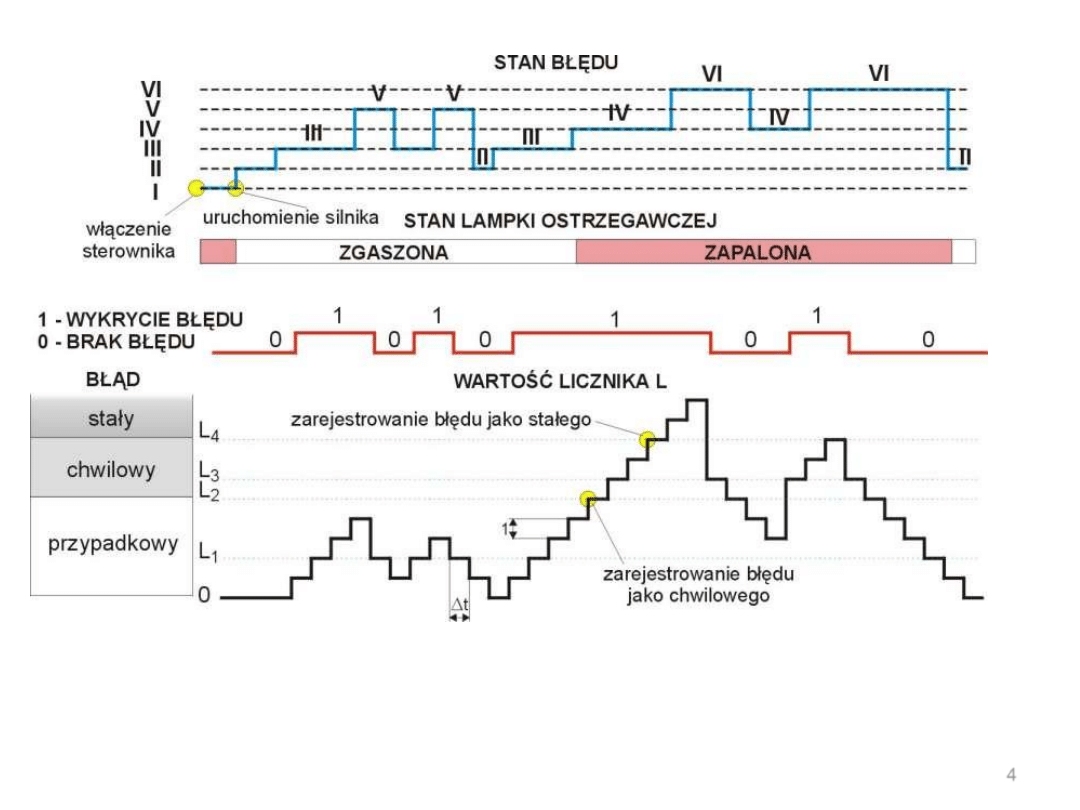
Aby uniknąć przypadkowych alarmów wprowadzono algorytm
kwalifikacji zauważonego błędu jako błąd przypadkowy, chwilowy lub
stały.
Ustalono sześć stanów błędu (od I do VI) oraz cztery poziomy
licznika wystąpienia błędu L (L1, L2, L3, L4).
Licznik L jest zwiększany lub zmniejszany o 1 w odstępach czasu
t w zależności od tego, czy wykryto błąd.
Po przekroczeniu wartości L2 uważany jest za błąd chwilowy, po
przekroczeniu wartości L4 za błąd stały.
Stan błędu przyjmuje wówczas stany odpowiednio III i IV.
Lampka kontrolna zapalana jest dopiero po zakwalifikowaniu błędu
jako stały, jest on wówczas zapisywany w pamięci sterownika.
Ponieważ przed rozruchem program sterujący nie jest w stanie
wykryć błędu, dla bezpieczeństwa lampka ostrzegawcza jest włączona,
stan błędu przyjmuje stan I. Po udanym uruchomieniu silnika lampka
gaśnie, licznik L przyjmuje 0, stan błędu ustalany jest jako II.
4
Rys.1. Przebieg czasowy kwalifikacji błędu jako przypadkowego, chwilowego lub
stałego w oparciu o wartość licznika wystąpień błędu L

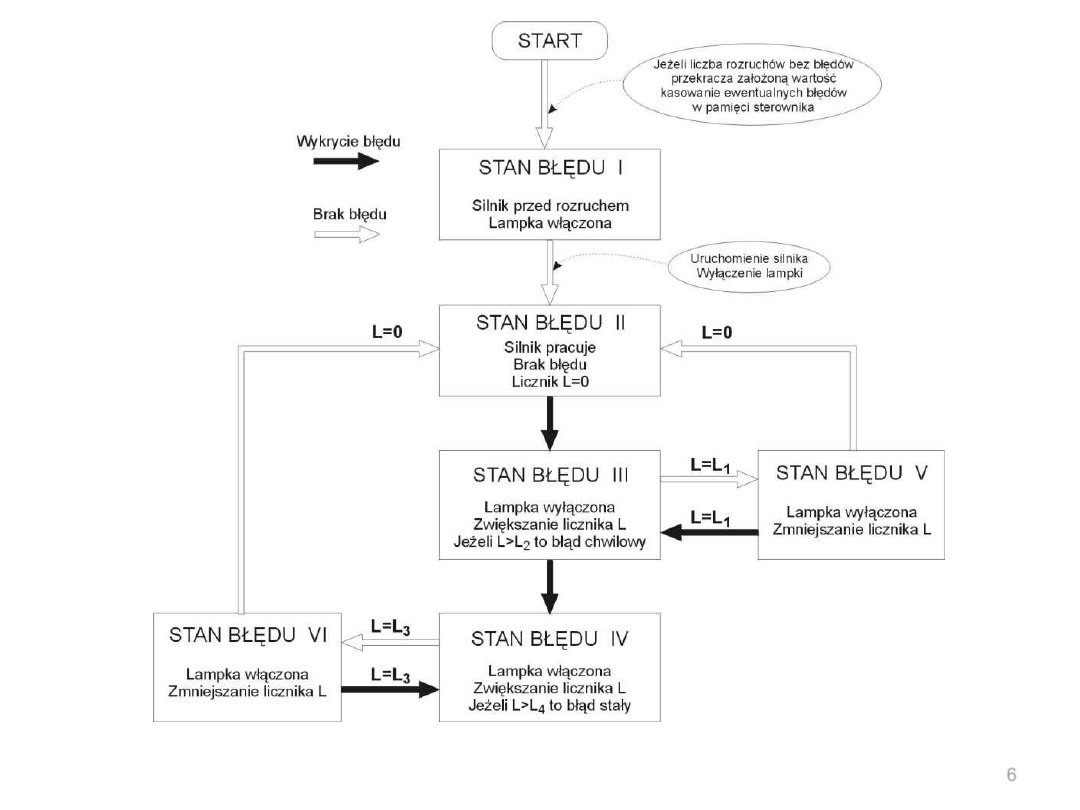
Wykrycie błędu powoduje przyjęcie stanu błędu III.
Wzrost wartości licznika skutkuje podwyższaniem klasy błędu. W
celu eliminowania przypadkowości wprowadzono dwie wartości
pośrednie licznika L
1
i L
3
, które są przypisywane w chwilach, gdy
następuje zmiana wyniku poszukiwania błędu. Schemat przejścia
pomiędzy stanami wykrycia błędu przedstawia rys.2.
5
6
Rys.2. Schemat przejścia pomiędzy stanami wykrycia błędu

7
System samodiagnostyczny – OBD II
Celem tego systemu jest stworzenie efektywnych, uniwersalnych metod
monitorowania
elektronicznego
układu
sterowania
silnikiem
oraz
elektronicznego układu kontroli emisji spalin.
Główną uwagę zwrócono na niebezpieczeństwo wzrostu emisji toksycznych
składników spalin. W tym celu analizuje się poprawność spalania w
kolejnych cyklach silnikowych (wykrywanie tzw. wypadania zapłonów) czy
też sprawność działania katalizatora.
Najważniejszymi kontrolowanymi procesami, układami i elementami
układów są te, których nieprawidłowy przebieg (odnośnie procesów) lub
uszkodzenia powodują największy wzrost emisji składników toksycznych
spalin oraz mogą stać się przyczyną uszkodzeń innych elementów układów.
Są to:
procesy spalania w komorach spalania poszczególnych cylindrów
czujniki zawartości tlenu w spalinach (sondy lambda)
konwerter katalityczny
układ pochłaniania oparów paliwa ze zbiornika pojazdu

8
Układy OBD II/E-OBD nadzorują również pracę układów i
elementów układów, o których wiadomo, że ich nieprawidłowe
działanie spowoduje wzrost emisji składników toksycznych spalin.
Są to:
układ zasilania paliwem
układ recyrkulacji spalin (EGR -Exhaust Gas Recirculation)
układ dotłaczania dodatkowego powietrza (AI - Air Injection)
termostat układu chłodzenia silnika - kontrolowany od 2000 r.,
tylko przez układy standardu OBD II
układ sterujący przepływem oparów ze skrzyni korbowej do
kolektora dolotowego
9
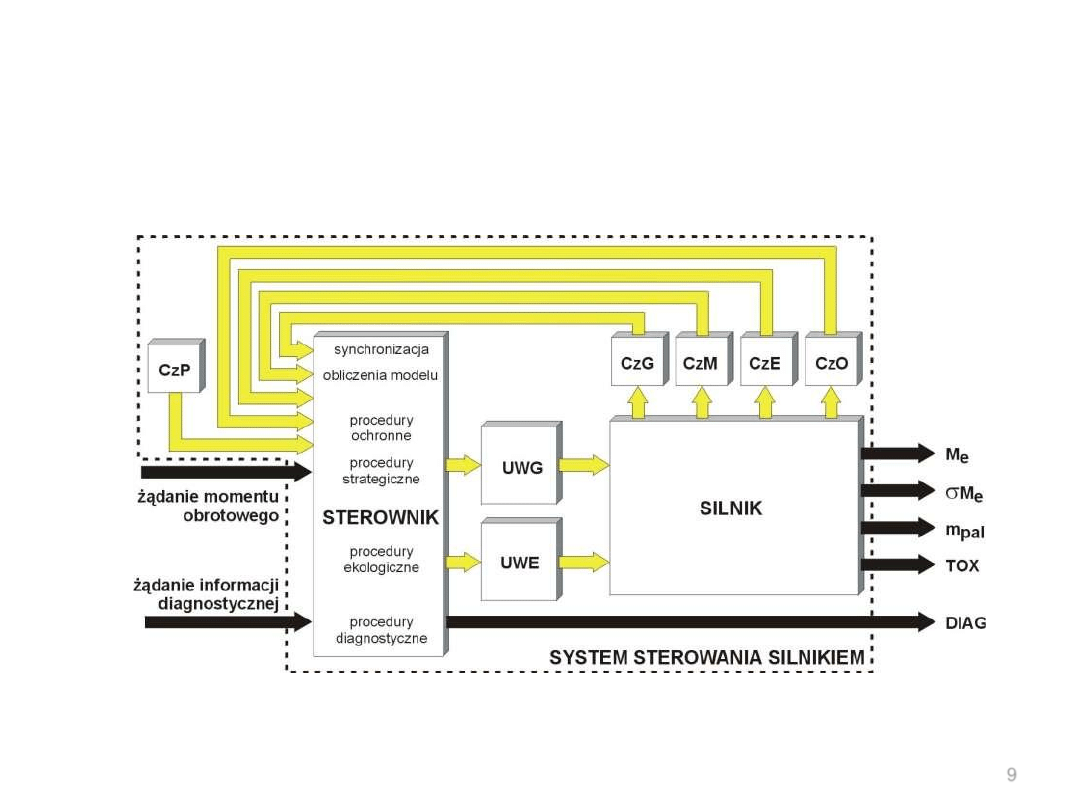
Zapewnienie niezawodnej pracy silnika oznacza również, że elektroniczny moduł
sterujący powinien, oprócz swoich podstawowych funkcji sterujących, mieć
możliwość przesyłania wyników przeprowadzonej kontroli do zewnętrznego
urządzenia diagnostycznego (rys.3). Praktycznie każdy produkowany obecnie
system sterowania silnikiem wyposażony jest w specjalny interfejs służący do
komunikacji z wyspecjalizowanymi urządzeniami diagnostycznymi.
Rys.3. Schemat zadań algorytmu sterującego silnikiem z dodaniem zadań
autodiagnostyki i ochrony silnika
Wyszukiwarka
Podobne podstrony:
FIZLAB, SPR B12, Tabela do sprawozdań
b12 (2)
B12
B12 Funkcjonalno systemów?S
b12
Leczenie choroby Alzheimera witaminą B12
B12, kulturystyka, Teksty
Witamina B12 (Cyjanokobalamina), Witaminy
witaminy, Witamina B12, Witamina B12
B12 ( Transport )
B12 Funkcjonalno systemów DCS
wit B12 plaga awitaminozy
food B12
więcej podobnych podstron