
Cyfrowe przetwarzanie sygnałów
Transformaty ortogonalne (05)
Sławomir Kulesza
Wykład fakultatywny dla studentów
III r. spec. Informatyka ogólna
Rok akademicki 2012/2013
Transformaty skończone
●
Każde przekształcenie skończonego w sensie
czasu trwania sygnału z dyskretnym czasem na
sygnał o tej samej długości zależny od innej
wielkości nazywamy transformatą.
●
Transformata mapuje sygnał z dziedziny czasu
na przeciwdziedzinę (np. częstości).
●
Transformata odwrotna mapuje sygnał z
przeciwdziedziny z powrotem na dziedzinę
czasu.

Para transformat
●
Niech x[n] będzie sygnałem z dyskretnym
czasem (o długości N), zaś X[k] niech będzie
N-punktowym ciągiem współczynników jego
transformaty, wówczas prostą transformatę:
nazywamy równaniem analizy sygnału
X [k ]=
∑
n=0
N −1
x [n] Ψ
∗
[
k , n]

Para transformat
●
Analogicznie, transformatę odwrotną:
określa się mianem równania syntezy
sygnału.
●
Występujący w obu transformatach sygnał
Ψ[k,n] nazywany jest bazą transformaty.
x [n]=
1
N
∑
n=0
N −1
X [ k ] Ψ [k , n]
Transformaty ortogonalne
●
Spośród licznych transformat skończonych,
wyróżnioną grupę stanowią transformaty
ortogonalne spełniające warunek:
●
Transformaty ortogonalne zbudowane są
zatem w oparciu o ortogonalne sygnały
bazowe
1
N
∑
n=0
N −1
Ψ [
k , n] Ψ
∗
[
l , n]=
{
1⇔l=k
0⇔l≠k

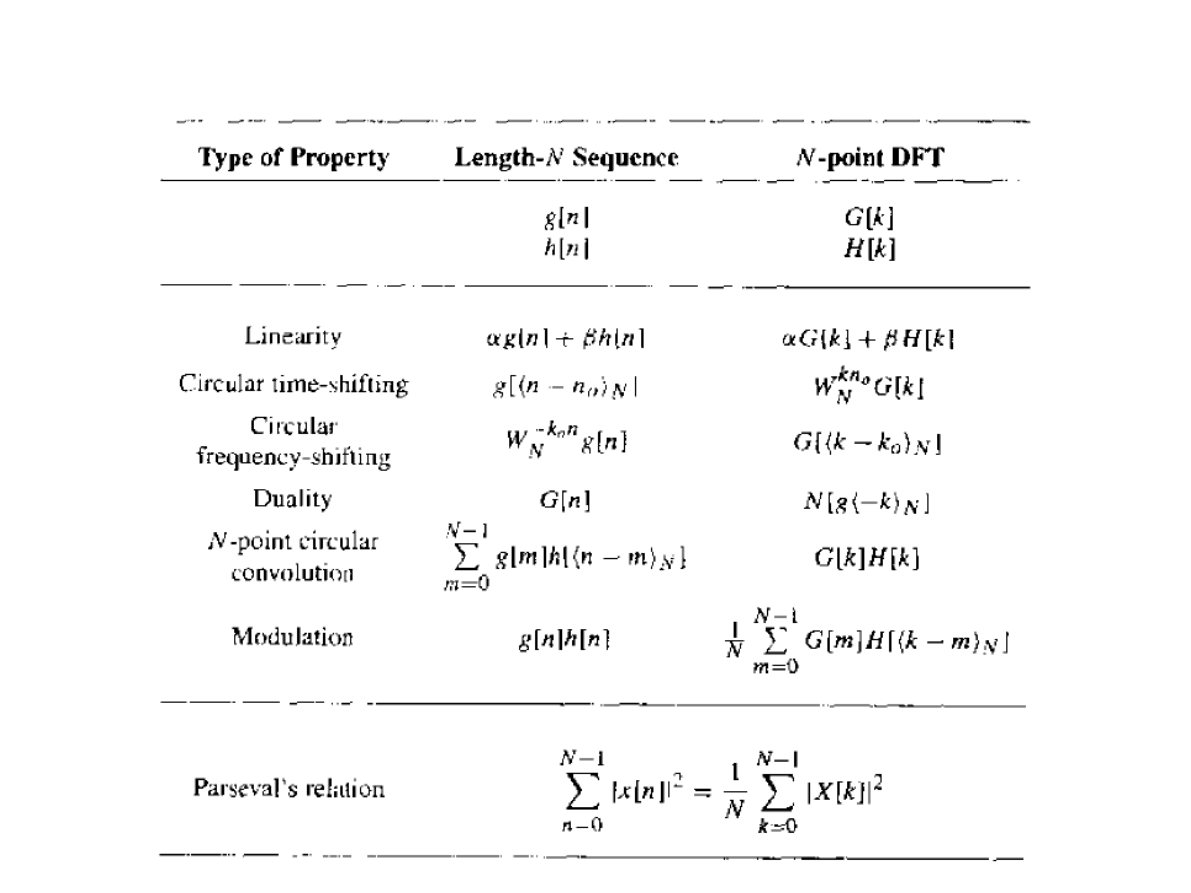
Zachowanie energii
●
Transformaty ortogonalne zachowują energię
sygnału:
Jest to tzw. równość Parsevala
∑
n=0
N −1
∣
x [n]∣
2
=
∑
n=0
N −1
x [n] x
∗
[
n]=
1
N
∑
n=0
N −1
∣
X [k ]∣
2

Dyskretna transformata Fouriera
●
N-punktowa dyskretna transformata Fouriera
(Discrete Fourier Transform – DFT) jest
zdefiniowana jako:
●
Gdzie sygnał bazowy zespolonym ciągiem
wykładniczym:
X [k ]=
∑
n=0
N −1
x [n]e
−
j2 π kn/ N
, k =0,1 ,... N −1
Ψ [
k , n]=e
j2 π k n/ N
Ortogonalność sygnałów bazowych
●
Sprawdźmy ortogonalność sygnałów
bazowych DFT:
●
Podstawmy:
1
N
∑
n=0
N −1
Ψ [
k , n] Ψ
∗
[
l , n]=
1
N
∑
n=0
N −1
e
j 2 π(k−l )n/ N
S
N −1
=
∑
n=0
N −1
e
j 2 π(k−l )n/ N
=
∑
n=0
N −1
u
n
Ortogonalność sygnałów bazowych
●
Suma szeregu wynosi:
●
Po podstawieniu:
S
N −1
=
1−u
N
1−u
S
N −1
=
1−e
j 2 π(k−l )
1−e
j 2 π(k−l )/ N
=
{
1⇔l=k +r ℤ
0⇔l≠k
Dyskretna Transformata Fouriera
●
Podstawiając:
●
DFT można zapisać jako:
●
Transformata odwrotna iDFT ma postać:
w
N
=
e
−
j 2 π/ N
X [k ]=
∑
n=0
N −1
x [n]w
N
kn
, k =0,1 ,... , N −1
x [n]=
1
N
∑
k=0
N −1
X [ k ] w
N
−
kn
, k =0,1 ,... , N −1

Szybka Transformata Fouriera
●
Aby ograniczyć złożoność obliczeniową DFT
opracowano algorytmy rzędu N(log
2
N), które
określane są mianem szybkiej transformaty
Fouriera (Fast Fourier Transform – FFT).
●
FFT jest identyczna z DFT, tyle że prowadzi do
wyniku w krótszym czasie, zwłaszcza gdy
N=2
k
.
Związki między DTFT a DFT
●
DTFT sygnału z dyskretnym czasem jest dana
jako:
●
Próbkując widmo DTFT w równoodległych
częstościach:
X (e
j ω
)=
∑
n=0
∞
x [n]e
−
j ω n
=
∑
n=0
N −1
x [n]e
−
j ω n
ω
k
=
2 π k
N
, k =0,1 ,... , N −1

Związki między DTFT a DFT
●
Próbkowaną DTFT można zapisać jako:
●
Przez porównanie widać, że N-punktowa DFT
X[k] jest ciągiem próbek transformaty DTFT
X(e
jω
) zebranych w N-równooldległych
punktach widma ω
k
.
X (e
j ω
)∣
ω
k
=
∑
n=0
N −1
x [n]e
−
j 2 π k n/ N

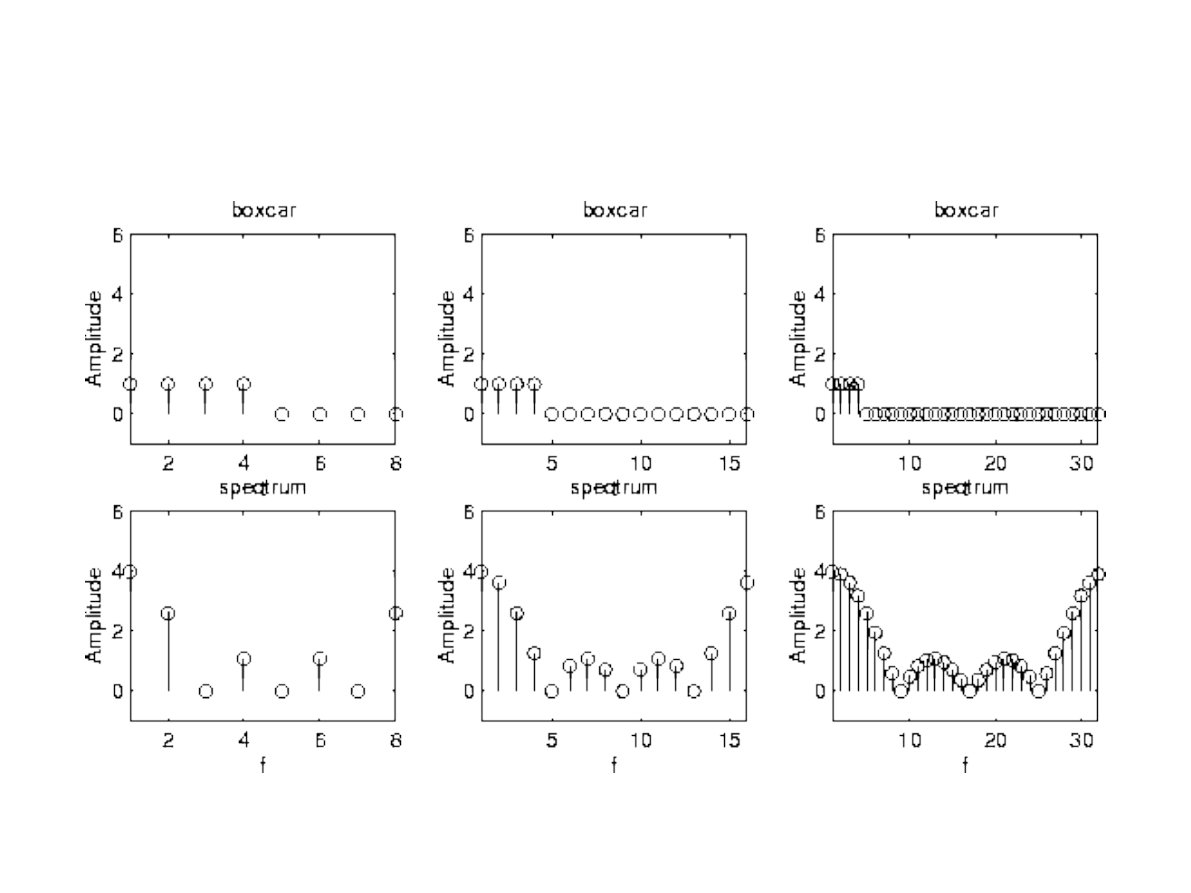
Zero-padding
●
Jeśli chcemy obliczyć transformatę DTFT na
gęstej siatce M-punktów dla sygnału N-
punktowego, możemy ten sygnał uzupełnić
(M-N)-zerami (zero padding):
●
Wówczas:
x [n]→ x
p
[
n]=[ x ,0 ,0,0 ,0 ,0]
X (e
j ω
k
)=
∑
n=0
N −1
x [n]e
−
j 2 π k n/ M
=
∑
n=0
M −1
x
p
[
n]e
−
j 2 π kn / M
Zero-padding

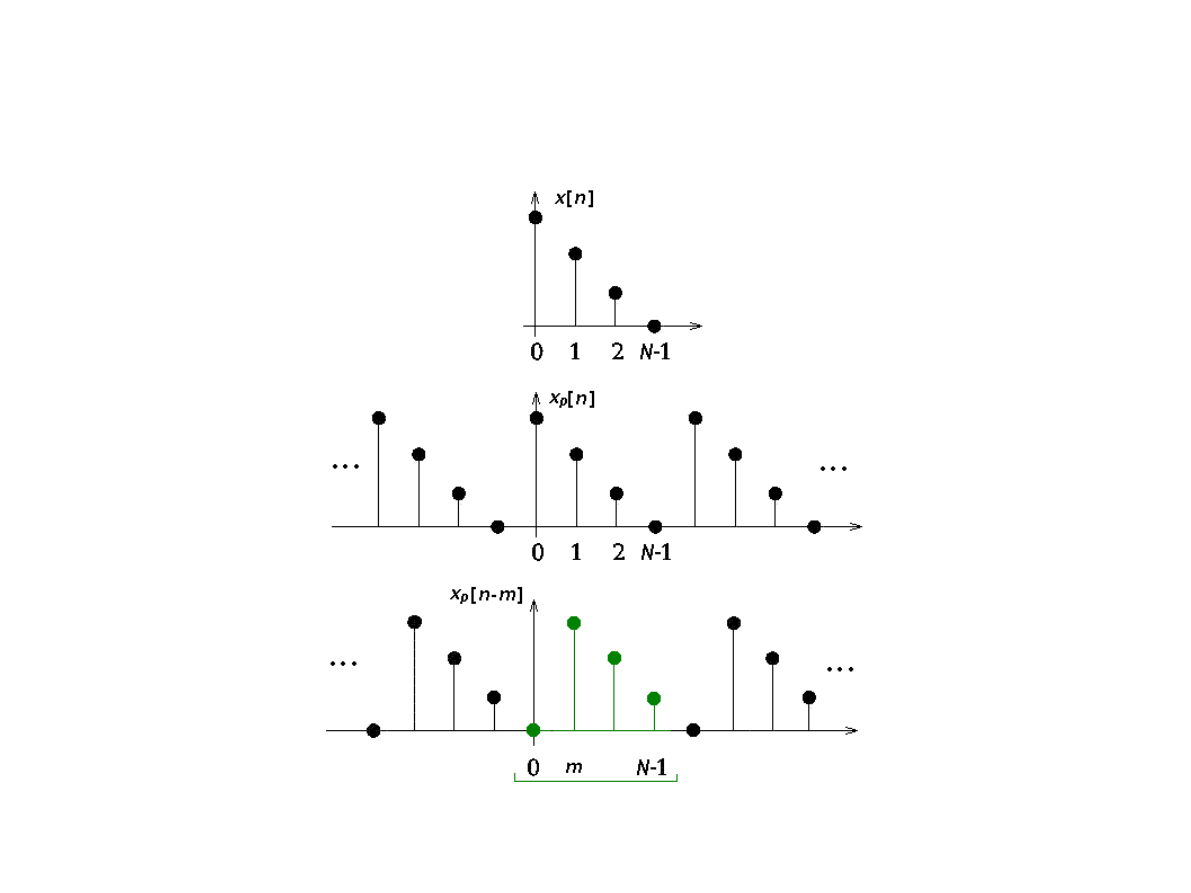
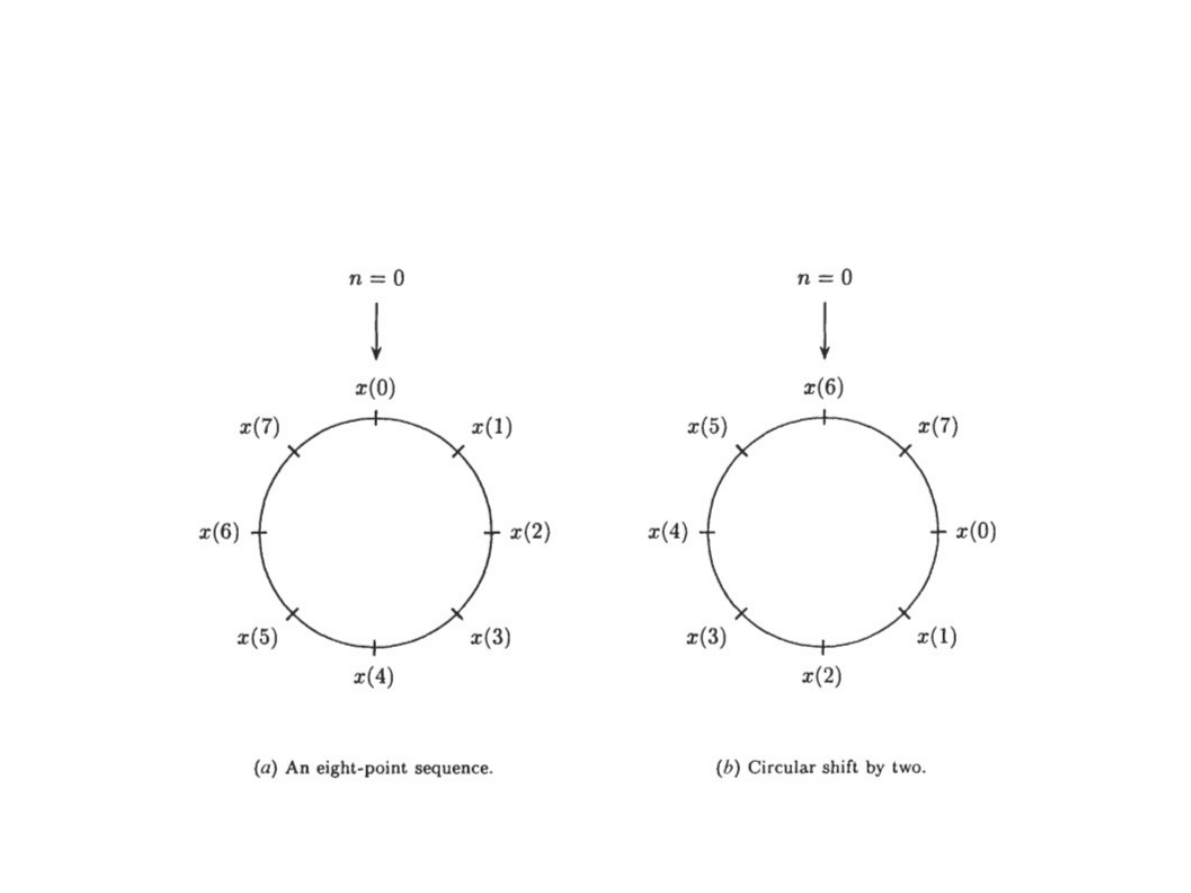
Kołowe przesunięcie sygnału
●
Ponieważ własności DFT wykorzystują
przesuwanie sygnału w dziedzinie i
przeciwdziedzinie, należy zdefiniować te
operacje.
●
Jeśli wyjściowy sygnał x[n] jest N-punktowy
(0≤n≤N-1), to jego przesunięta kopia nie może
wyjść poza ten zakres. Wykorzystuje się w tym
celu operację modulo, definiując przesunięcie
kołowe (circular shift).
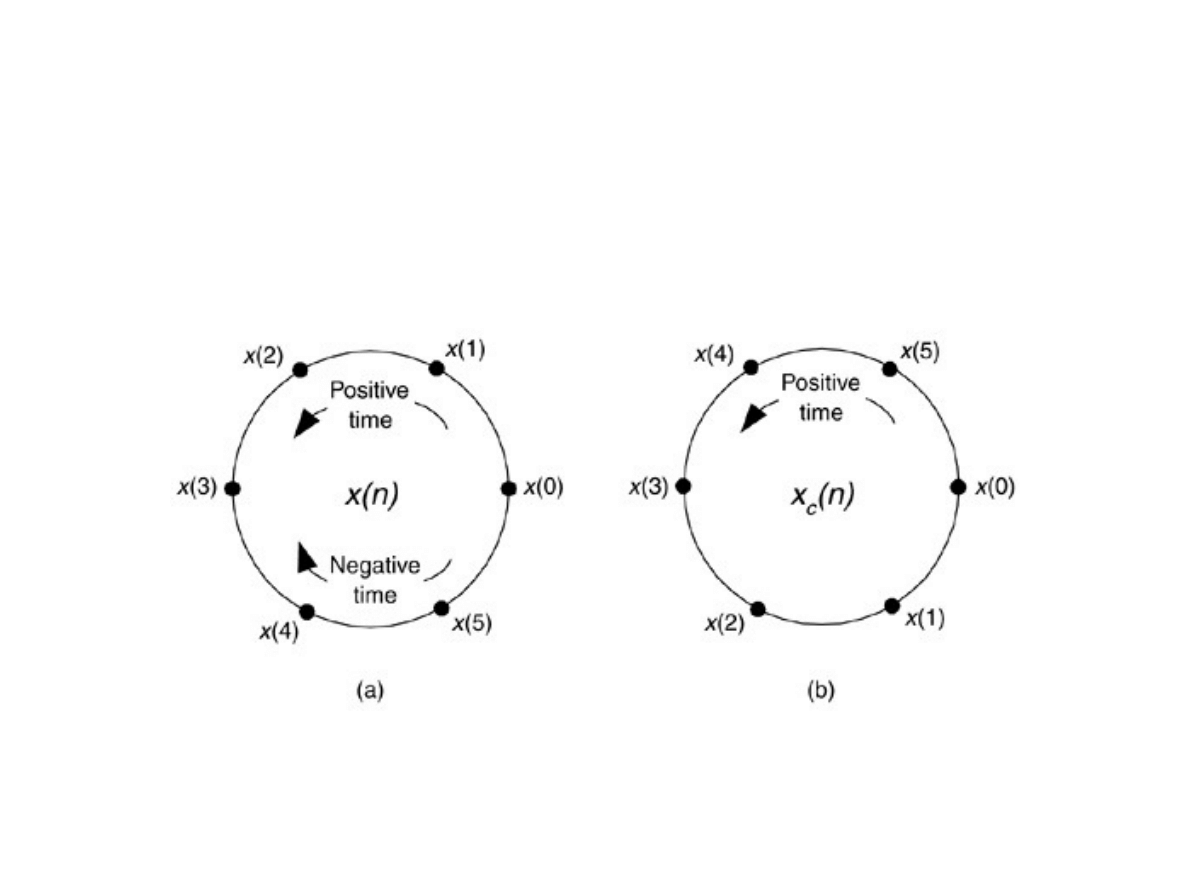
Kołowe przesunięcie sygnału

Kołowe przesunięcie sygnału
●
Zauważmy przy tym, że:
●
Tak więc przesunięcie w prawo o n
0
-próbek
jest tożsame przesunięciu w lewo o (N-n
0
)-
próbek.
x
s
[
n]= x [(n−n
0
)
N
]=
x [(n−N +n
0
)
N
]
Kołowe przesunięcie sygnału
Kołowe zawinięcie sygnału

Splot kołowy
●
Przypomnijmy, że splot dwóch N-punktowych
sygnałów x[n] oraz h[n] ma postać:
●
Aby jednak zachować długość ciągu
wynikowego, musimy operację splotu
zdefiniować wykorzystując operację kołowego
przesunięcia i odbicia sygnału.
y
L
[
n]=x⊗h=
∑
m=0
N −1
x [m] h[n−m] , 0≤n≤2N−2

Splot kołowy
●
Splot kołowy zdefiniowany jest jako:
●
Splot kołowy jest zawsze ciągiem N-
punktowym.
y
c
[
n]=
∑
m=0
N −1
x [n]h[(n−m)
N
]=
x ∘ h
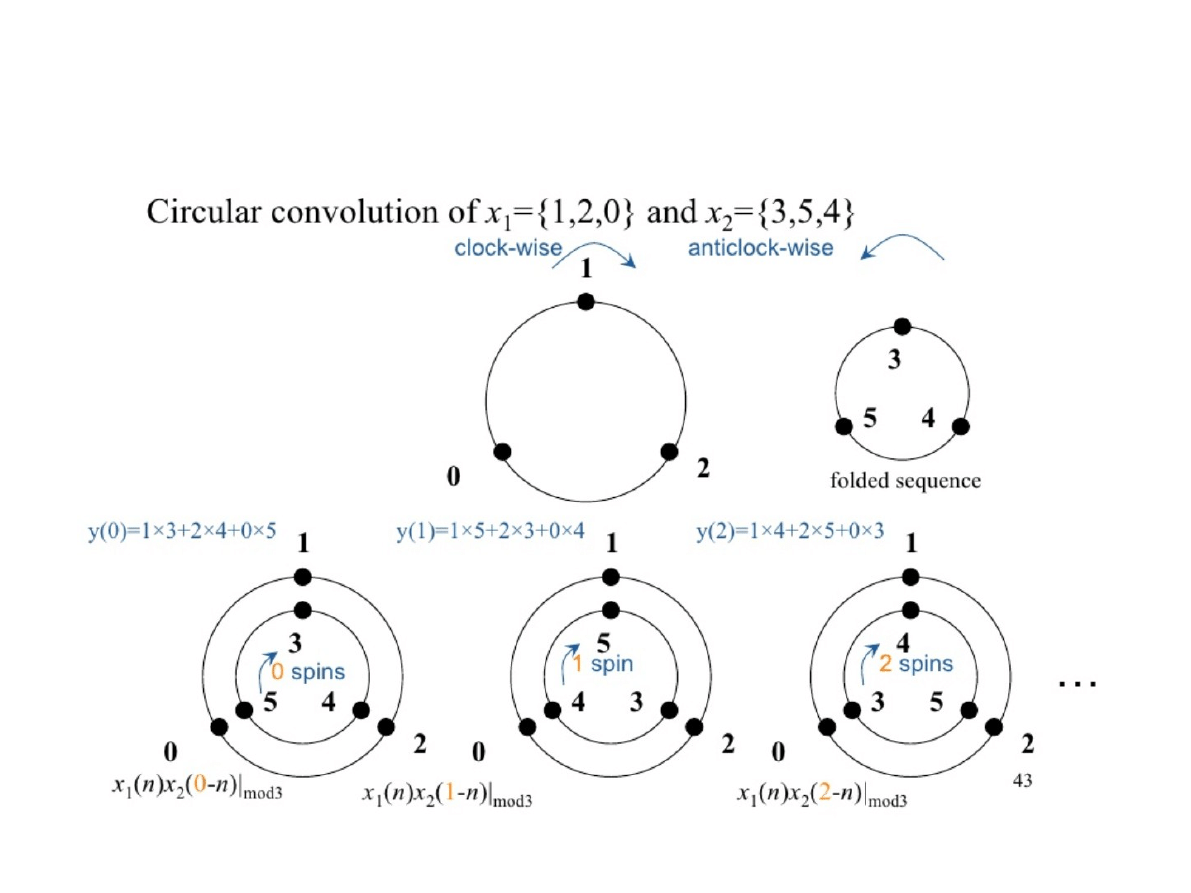
Obliczanie splotu kołowego

Obliczanie splotu kołowego
●
Metoda macierzowa
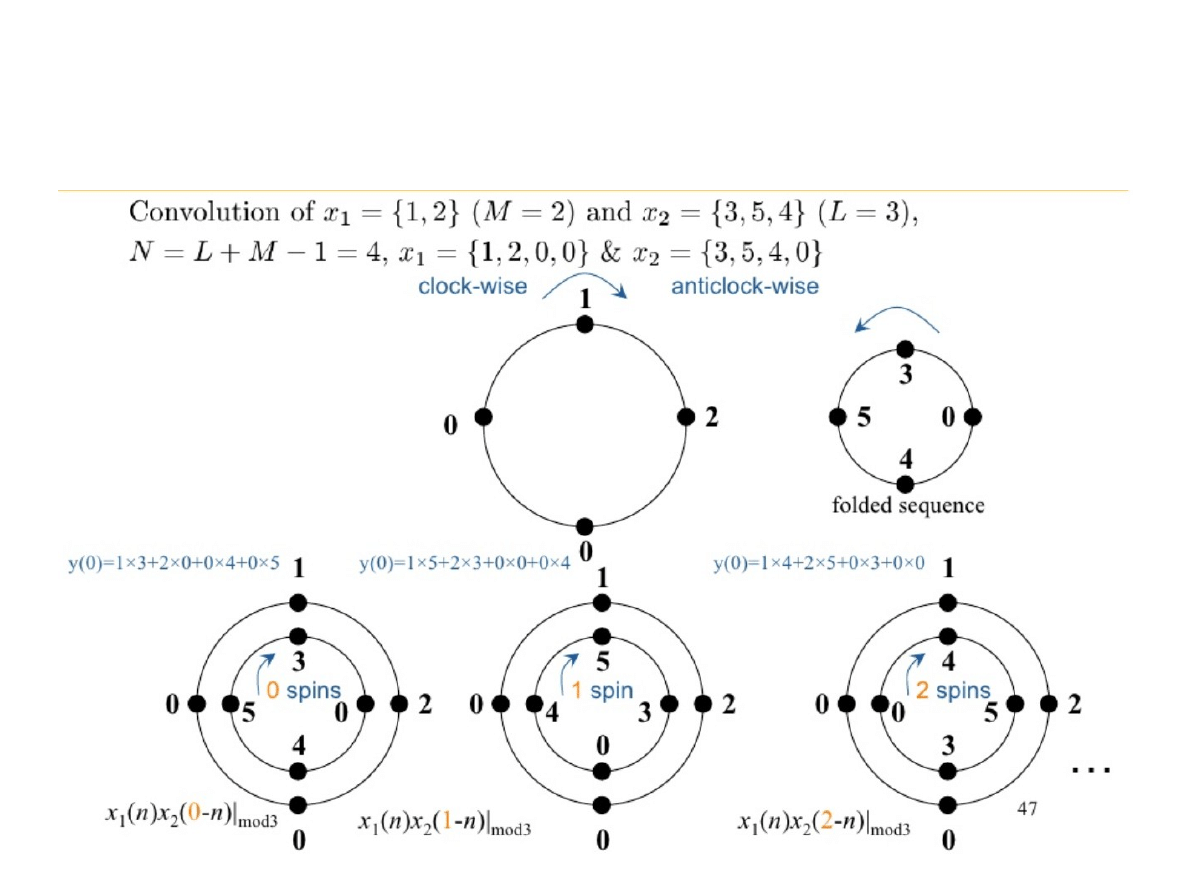
Obliczanie splotu liniowego przy
pomocy splotu kołowego

Filtracja sygnałów
●
Mając wydajne algorytmy obliczania DFT –
Fast Fourier Transform (FFT) możemy szybko
liczyć transformaty dowolnych sygnałów i
transformaty odwrotne.
●
Mając możliwość liczenia splotu liniowego jako
splotu kołowego sygnału uzupełnionego
zerami możemy zbudować wydajne filtry
cyfrowe.
Podział sygnałów N-punktowych
●
Każdy sygnał czasu dyskretnego można
przedstawić jako sumę składowych
sprzężonych kołowo: symetrycznej x
cs
[n] oraz
antysymetrycznej x
ca
[n]:
x [n]= x
cs
[
n]+ x
ca
[
n]
x
cs
[
n]=
1
2
(
x [n]+ x
∗
[(−
n)
N
])
x
ca
[
n]=
1
2
(
x [n] ax
∗
[(−
n)
N
])

Sygnały parzyste i nieparzyste
●
N-punktowy sygnał rzeczywisty czasu
dyskretnego rozkłada się według powyższego
wzoru na dwie składowe rzeczywiste: parzystą
(zespoloną symetryczną) oraz nieparzystą
(zespoloną antysymetryczną).

Symetrie geometryczne
●
N-punktowy sygnał x[n] jest symetryczny, gdy:
●
N-punktowy sygnał x[n] jest antysymetryczny,
gdy:
x [n]= x [ N −1−n]
x [n]=−x [ N −1−n]
Symetrie geometryczne

Związki DFT z symetriami
●
W ogólności, DFT jest sygnału z dyskretnym
czasem jest sygnałem zespolonym postaci:
gdzie poszczególne składowe liczy się ze
wzorów:
X [k ]= X
ℜ
[
k ]= X
ℑ
[
k ]
X
ℜ
[
k ]=
1
2
(
X [k ]+ X
∗
[
k ])
X
ℑ
[
k ]=
1
2
(
X [k ]− X
∗
[
k ])

Związki DFT z symetriami
●
W ogólności, DFT jest sygnału z dyskretnym
czasem jest sygnałem zespolonym postaci:
gdzie poszczególne składowe liczy się ze
wzorów:
X [k ]= X
ℜ
[
k ]= X
ℑ
[
k ]
X
ℜ
[
k ]=
1
2
(
X [k ]+ X
∗
[
k ])
X
ℑ
[
k ]=
1
2
(
X [k ]− X
∗
[
k ])
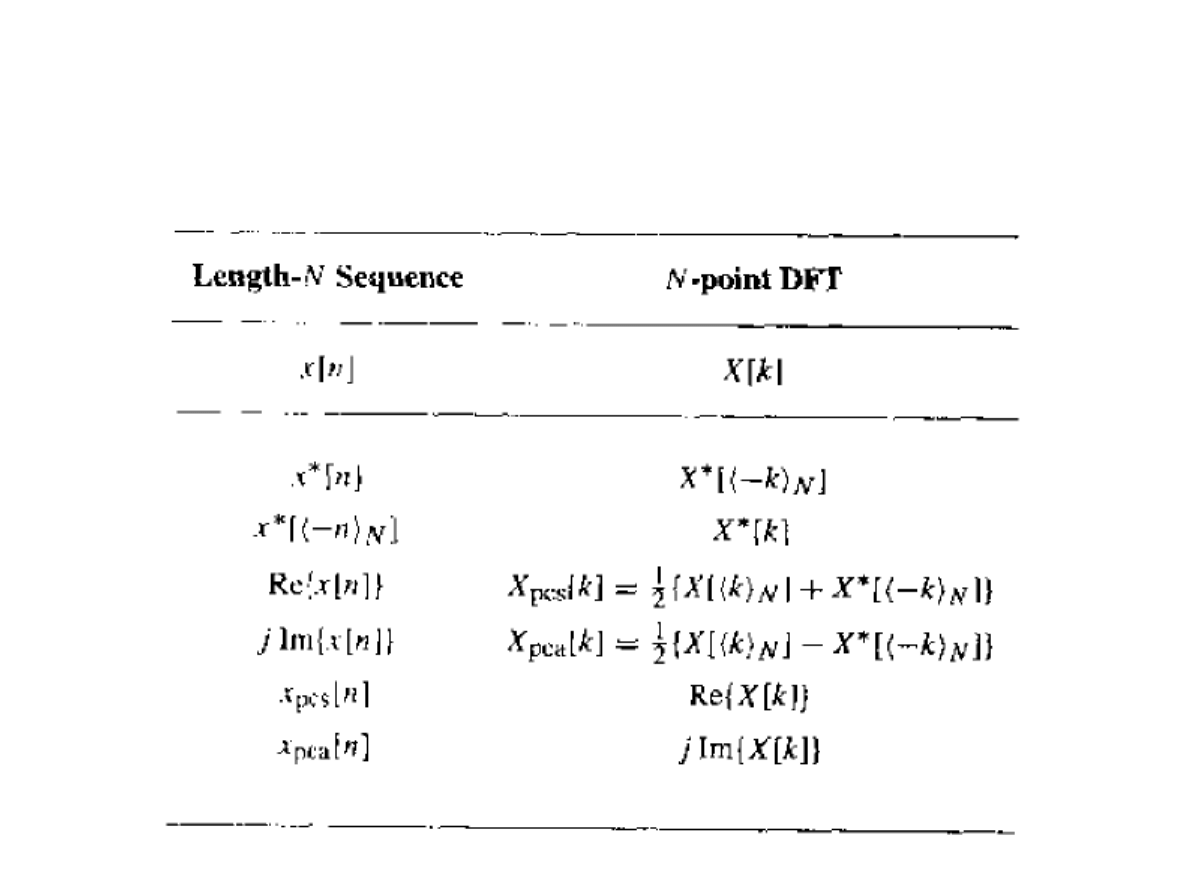
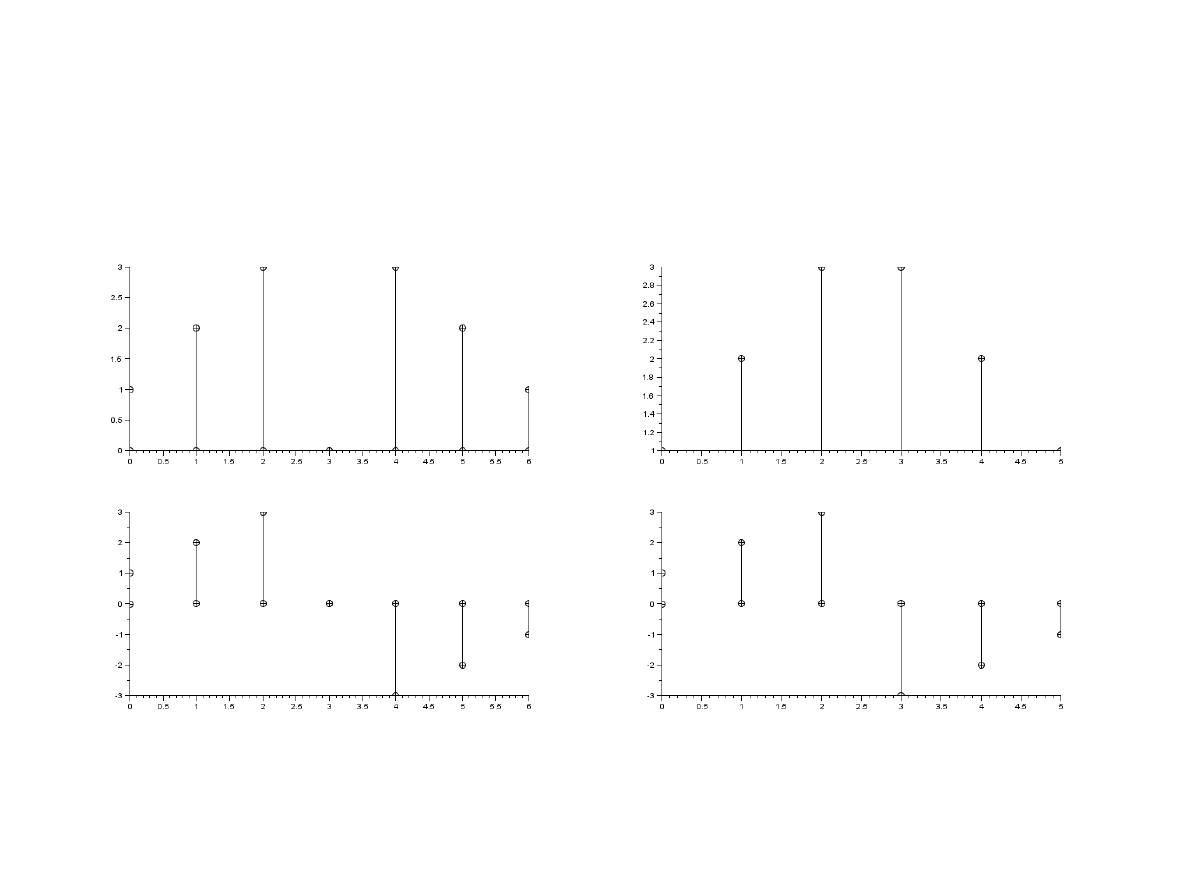
Symetrie DFT dla sygnałów
zespolonych
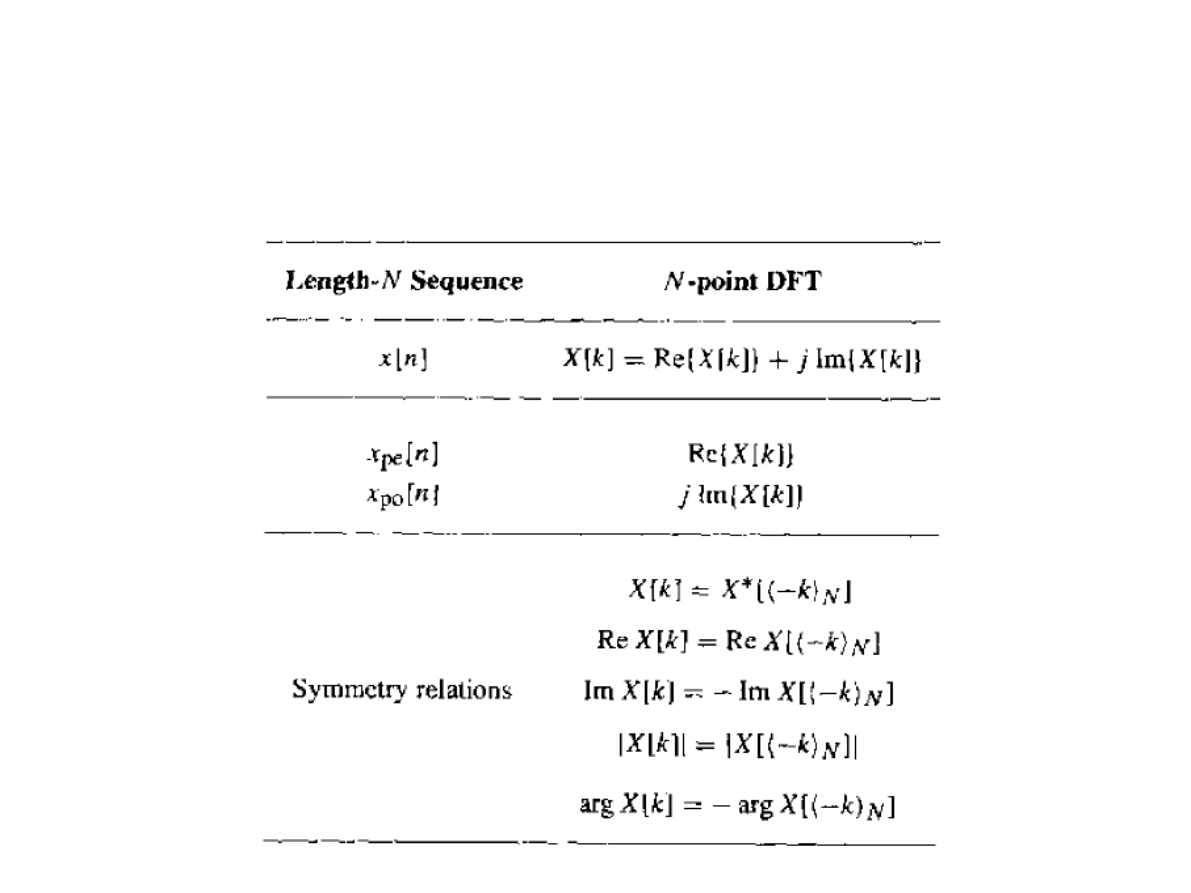
Symetrie DFT dla sygnałów
rzeczywistych
Własności DFT

Nadmiarowość DFT
●
Pamiętamy, że N-punktowa DFT sygnału
rzeczywistego jest sygnałem zespolonym
spełniającym warunek symetrii:
●
Dla parzystego N, próbki X[0] oraz X[(N-2)/2]
są rzeczywiste, zaś pozostałe (N-2)-próbki są
zespolone, jednak tylko połowa z nich jest
różna od reszty.
X [k ]= X
∗
[(−
k )
N
]

Nadmiarowość DFT
●
Dla nieparzystego N, X[0] jest próbką
rzeczywistą, a pozostałe (N-1) – zespolone,
jednak tylko połowa z nich jest odmienna od
reszty dzięki symetrycznemu sprzężeniu.
●
Świadczy to o nadmiarowości sygnału
(redundancy).

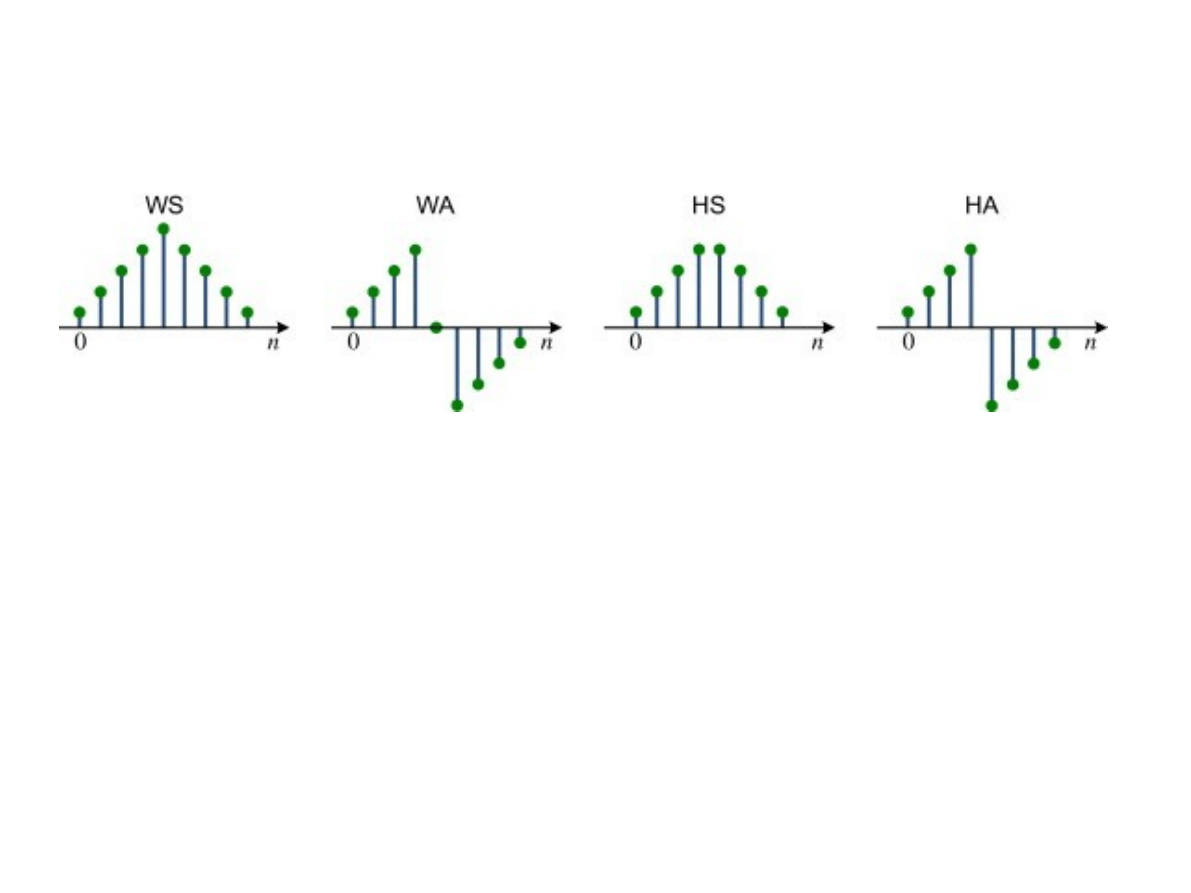
Przedłużanie sygnału
●
4 możliwe schematy przedłużania sygnału:
–
WS – whole-sample symmetry
–
WA – whole-sample antisymmetry
–
HS – half-sample symmetry
–
HA – half-sample antisymmetry
●
Po przedłużeniu obu końców sygnału
dostajemy 16 możliwych schematów
przedłużania, z czego 8 symetrycznych
stanowi bazę DCT, zaś 8 antysymetrycznych –
bazę DST
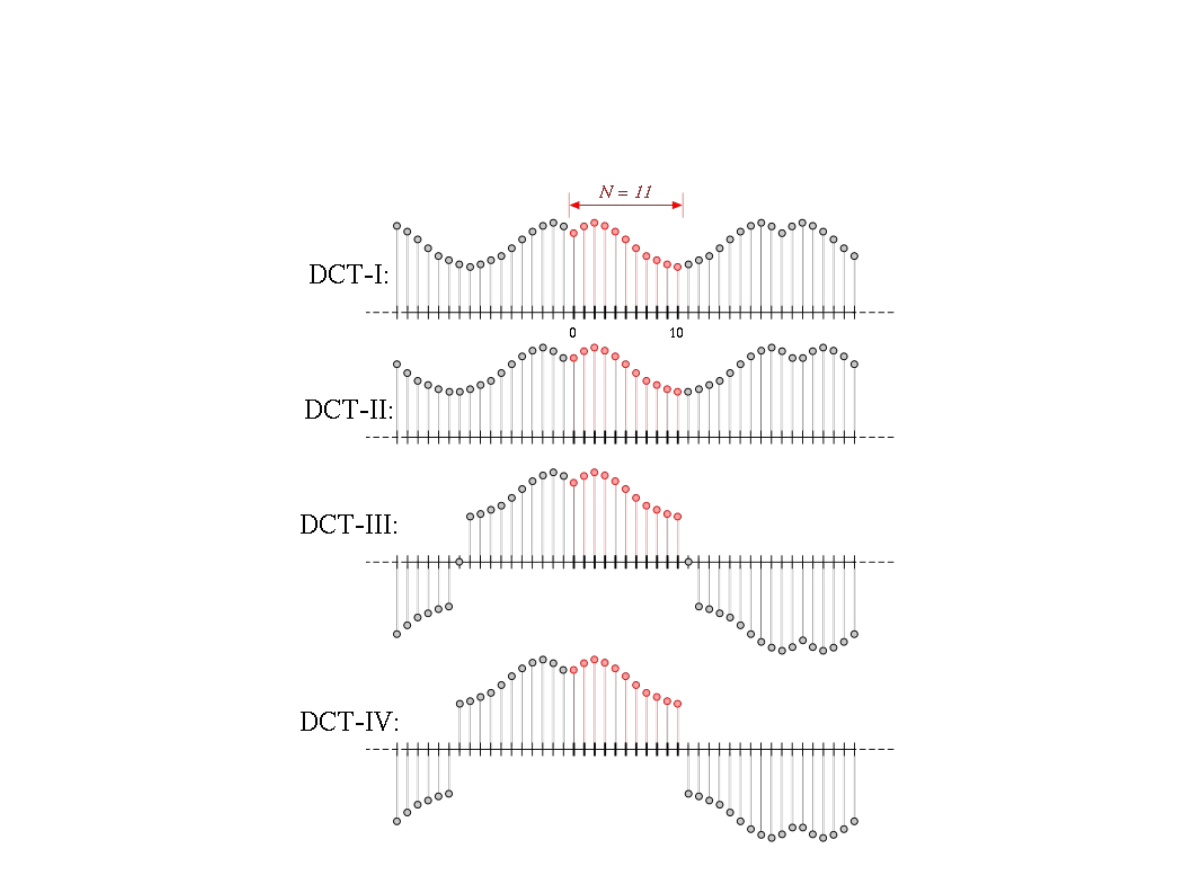
Przedłużanie sygnału
●
Jeśli sygnał wyjściowy ma postać: x[n] =
[a,b,c,d], to jego okresowy, przedłużony
odpowiednik ma postać:
●
x
WSWS
[n] = [a,b,c,d,c,b] – typ I
●
x
HSHS
[n] = [a,b,c,d,d,c,b,a] – typ II
Przedłużanie sygnału
DCT typ II
●
Standardem używanym do kodowania JPEG,
MPEG oraz H.261 jest transformata
kosinusowa bazująca na przedłużaniu typu II.
●
Ta transformata jest nazywana także parzystą,
symetryczną DCT.

DCT typu II
●
Niech dany jest N-punktowy sygnał x[n].
●
Najpierw sygnał ten jest uzupełniany zerami:
●
Następnie tworzy się sygnał symetryczny typu
II y[n]:
x
zp
[
n]=
{
x [n]⇔0≤n≤ N −1
0⇔ N ≤n≤2N−1
y [n]=x
zp
[
n]+ x
zp
[
2N−1−n]=…
…
{
x [n]⇔0≤n≤N −1
x [2N−1−n]⇔ N ≤n≤2N−1

DCT typu II
●
Powstały sygnał spełnia warunek symetrii:
●
2N-punktowa transformata DFT tego sygnału
ma postać:
y [n]= y [2N−1−n]
Y [k ]=
∑
n=0
2N−1
y [n]w
2N
kn
, k =0,1 ,... , 2N−1

DCT typu II
●
Po przekształceniach:
●
N-punktowa transformata DCT typu II powstaje
przez wybranie pierwszych N-próbek powyższej
transformaty DFT i przemnożenie ich przez w
2N
k/2
Y [k ]=w
2N
−
k /2
∑
n=0
N −1
2x [n]cos
(
π
k (2n+1)
2N
)
,…
0≤k ≤2N−1
DCT typu II
●
DCT typu II ma ostatecznie postać:
●
Zauważmy, że dla rzeczywistego x[n], X
DCT
jest
także rzeczywiste.
X
DCT
[
k ]=
∑
n=0
N −1
2 x [n]cos
(
π
k (2n+1)
2N
)
, 0≤k ≤ N −1

iDCT
●
Odwrotna transformata kosinusowa N-
punktowego DCT ma postać:
●
Gdzie:
x [n]=
1
N
∑
k=0
N −1
α[
k ] X
DCT
[
k ]cos
(
π
k (2n+1)
2N
)
,0≤n≤ N −1
α [
k ]=
{
1
2
⇔
k =0
1⇔1≤k ≤N −1
Własności DCT
●
Liniowość DCT:
●
Symetria DCT:
●
Zachowanie energii:
α
g [n]+β h[n] ⇔
DCT
α
G
DCT
[
k ]+β H
DCT
[
k ]
g
∗
[
n] ⇔
DCT
G
DCT
∗
[
k ]
∑
n=0
N −1
∣
g [n]∣
2
=
1
2N
∑
k=0
N −1
α[
k ]∣G
DCT
[
k ]∣
2
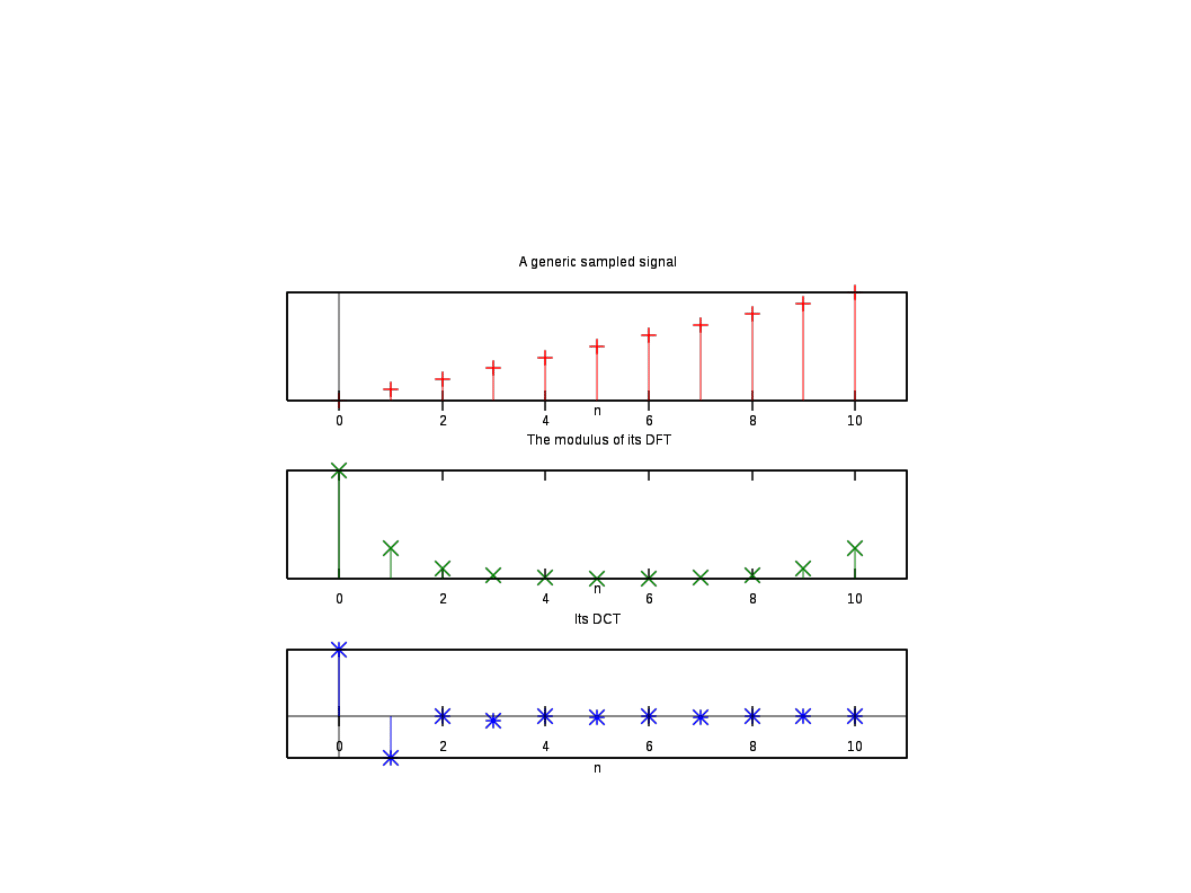
Kompaktowość DCT

Transformata Haara
●
Transformata Haara bazuje na sygnałach
powstałych ze spróbkowania ciągłych w
przedziale 0 ≤ t ≤ 1 funkcji Haara.
●
Zbiór funkcji Haara h
k
(t) zawiera N elementów,
k=0,1,...,N-1 (N jest potęgą 2).
●
Opisujący daną funkcję indeks k jest
jednoznacznie wyznaczony przez parę liczb p
oraz q takich, że:
k =2
p
+
q−1
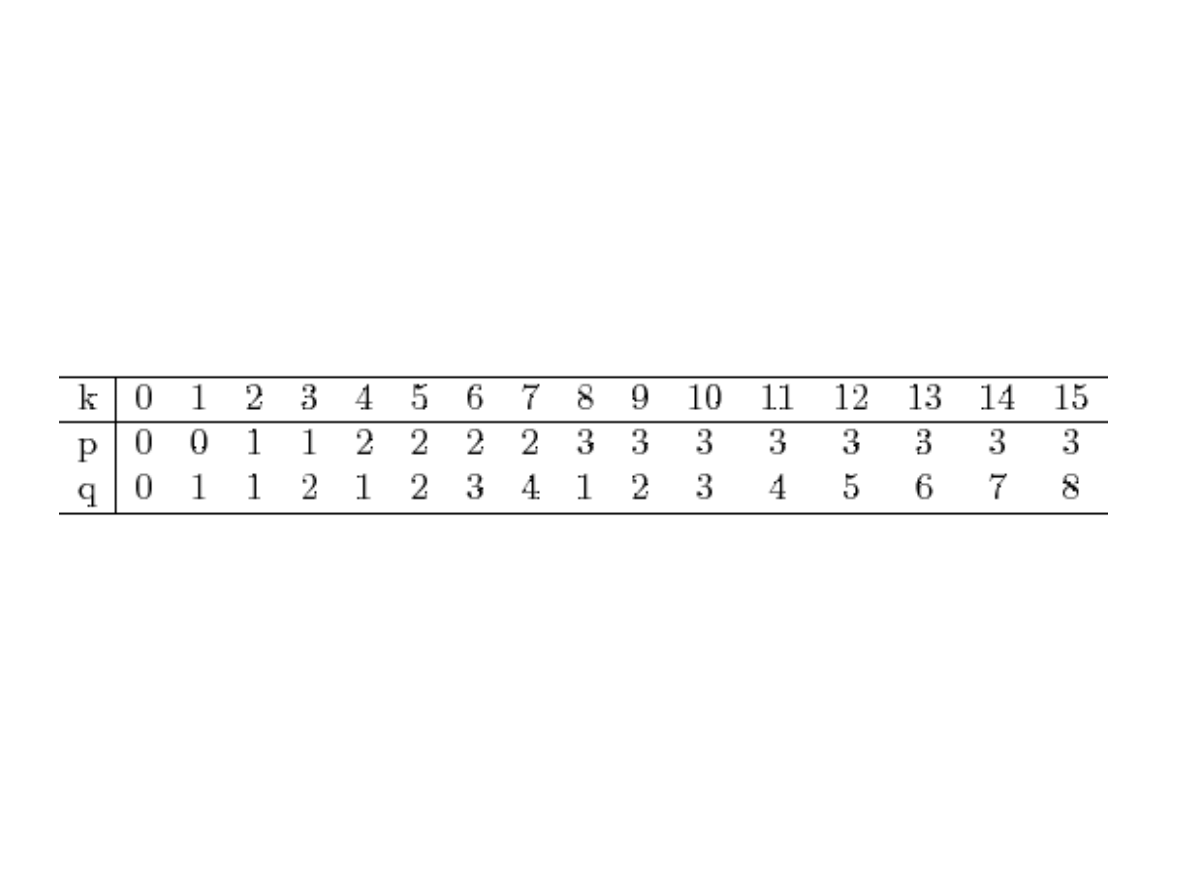
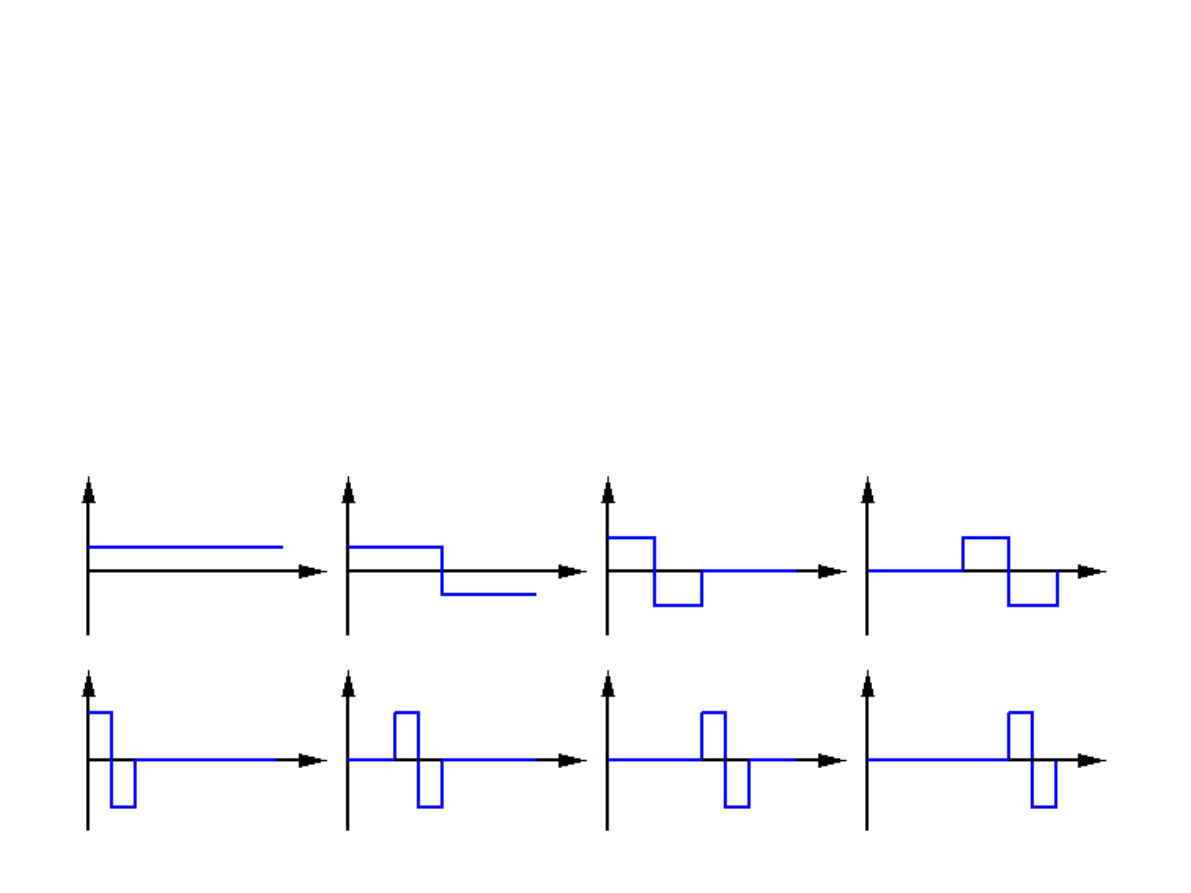
Indeksowanie funkcji Haara
●
Dla N=16:
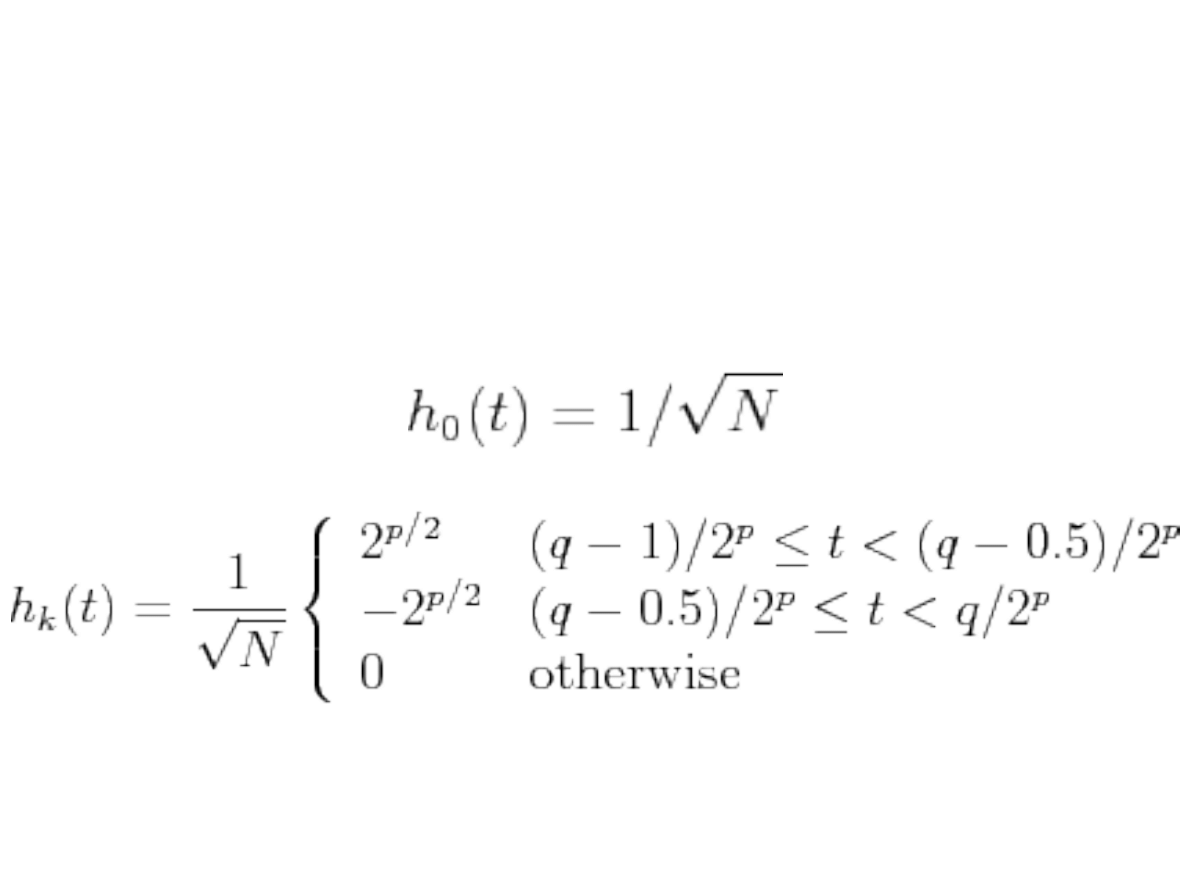
Znormalizowane funkcje Haara
●
Znormalizowane funkcje Haara zdefiniowane
są jako:
Macierz transformaty Haara
●
Macierzą transformaty Haara H
N
nazywamy
dyskretną funkcję Haara spróbkowaną w
punktach t=n/N, n=0,1,...,N-1.
●
Dla N=8:

Transformata Haara
●
N-punktowa transformata Haara ma postać:
●
O ile współczynniki transformat DFT oraz DCT
były powiązane ze specyficznymi
częstościami, transformata Haara (i inne
transformaty falkowe) odzwierciedla różne
położenia i skale składowych sygnału.
X
Haar
=
H
N
⋅
x [n]
Własności transformaty Haara
●
Ortogonalność:
wynika stąd łatwość liczenia transformaty
odwrotnej:
H
N
−
1
=
1
N
H
N
t
x [n]=
1
N
H
N
t
X
Haar
Własności transformaty Haara
●
Zachowanie energii sygnału:
∑
n=0
N −1
∣
x [n]∣
2
=
1
N
∑
k=0
N −1
∣
X
Haar
[
k ]∣
2
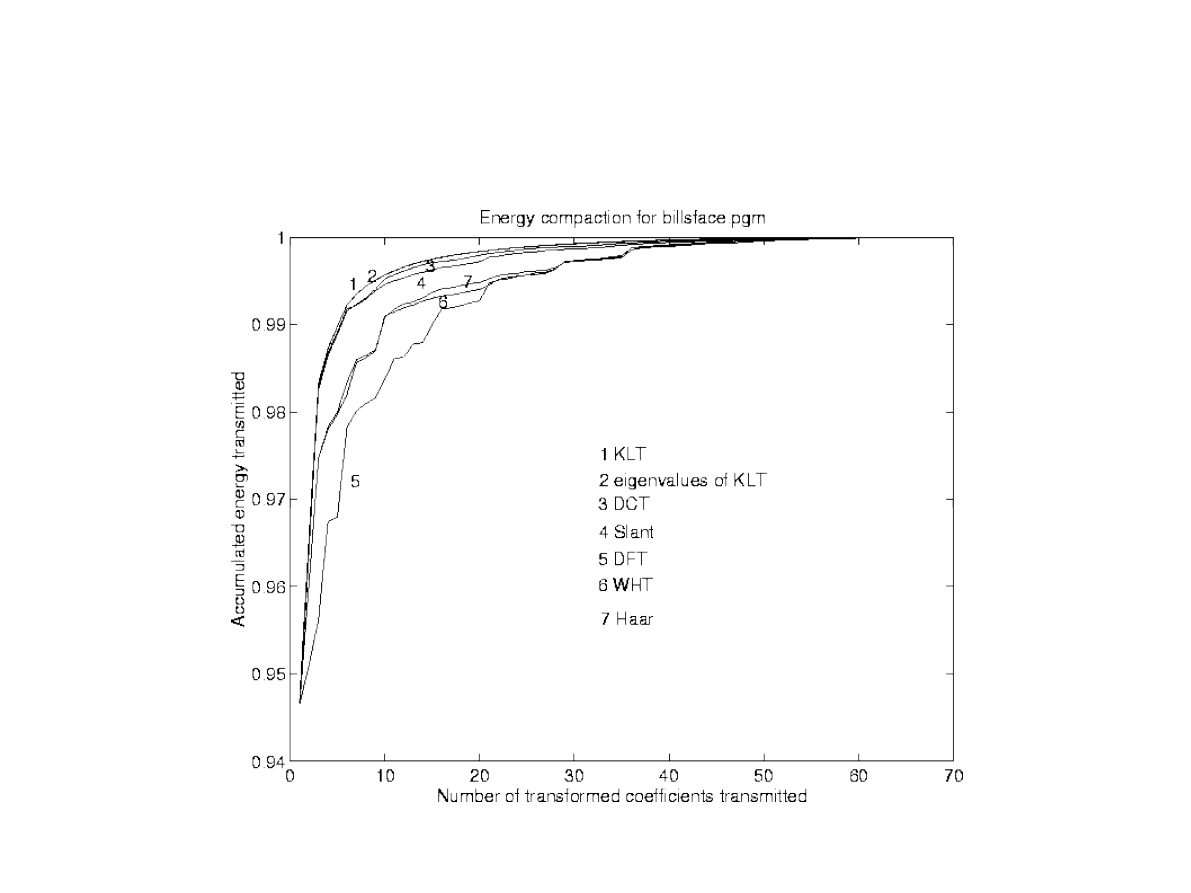
Kompaktowość transformat
Document Outline
- Slajd 1
- Slajd 2
- Slajd 3
- Slajd 4
- Slajd 5
- Slajd 6
- Slajd 7
- Slajd 8
- Slajd 9
- Slajd 10
- Slajd 11
- Slajd 12
- Slajd 13
- Slajd 14
- Slajd 15
- Slajd 16
- Slajd 17
- Slajd 18
- Slajd 19
- Slajd 20
- Slajd 21
- Slajd 22
- Slajd 23
- Slajd 24
- Slajd 25
- Slajd 26
- Slajd 27
- Slajd 28
- Slajd 29
- Slajd 30
- Slajd 31
- Slajd 32
- Slajd 33
- Slajd 34
- Slajd 35
- Slajd 36
- Slajd 37
- Slajd 38
- Slajd 39
- Slajd 40
- Slajd 41
- Slajd 42
- Slajd 43
- Slajd 44
- Slajd 45
- Slajd 46
- Slajd 47
- Slajd 48
- Slajd 49
- Slajd 50
- Slajd 51
- Slajd 52
- Slajd 53
- Slajd 54
- Slajd 55
- Slajd 56
Wyszukiwarka
Podobne podstrony:
DSP 06 z transformata
cwiczenie 1 oksydoreduktazy i transferazy wykrywanie aktywnosci enzymow w materiale biologicznym 05
05 Zab transfid 5893 Nieznany (2)
DSP Wyk%b3ad 05 UWM
notatki pracownia olej transformatorowy 06 05 11
05 Schematy zastępcze transformatora i generator synchronicznego
FIDE Trainers Surveys 2015 05 29 Jeroen Bosch The Transfer into the Pawn Ending
Warszawskie transformatory kioskowe Szz2009 05
T7 Transformacja układu odniesienia
podrecznik 2 18 03 05
regul praw stan wyjątk 05
11 BIOCHEMIA horyzontalny transfer genów
Transformacje91
5 Algorytmy wyznaczania dyskretnej transformaty Fouriera (CPS)
05 Badanie diagnostyczneid 5649 ppt
Podstawy zarządzania wykład rozdział 05
więcej podobnych podstron