
Cyfrowe przetwarzanie sygnałów
z-transformata (06)
Sławomir Kulesza
Wykład fakultatywny dla studentów
III r. spec. Informatyka ogólna
Rok akademicki 2012/2013

z-transformata
●
Istnieją sygnały czasu dyskretnego, które nie
są zbieżne w sensie DTFT, a więc nie
posiadają transformat DTFT, np.:
●
Aby badać własności tych sygnałów w
dziedzinie innej niż czas należy zdefiniować
odpowiednią transformatę - z-transformatę.
x [n]=u[n]
x [n]=sin (ω n)
x [n]=(0.5)
n
u[−n]

z-transformata
●
Z-transformatą sygnału czasu dyskretnego
x[n] nazywamy funkcję:
gdzie: z – jest zmienną zespoloną.
●
Z-transformatę oznaczamy symbolicznie:
X ( z)=
∑
n=−∞
∞
x [n] z
−
n
z [n]⇔
ℤ
−
1
ℤ
X (z)
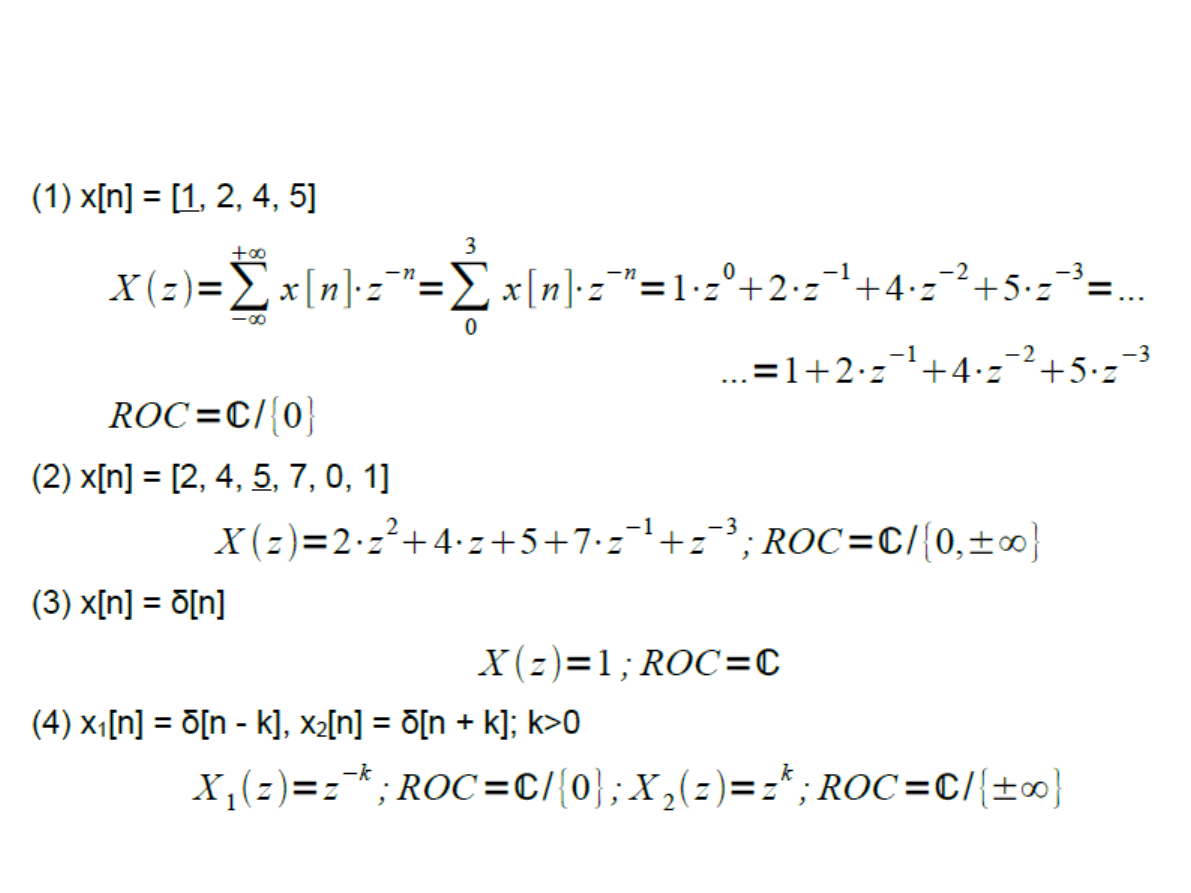
Przykłady

Z-transformata a DTFT
●
Wyraźmy zmienną z w postaci wykładniczej:
●
Wówczas z-transformata przyjmie postać:
●
Dla porównania, DTFT ma postać:
z=r e
j ω
Z (r e
j ω
)=
∑
n=−∞
∞
x [n] r
−
n
e
−
j ω n
X (e
j ω
)=
∑
n=−∞
∞
x [n]e
−
j ω n

Z-transformata a DTFT
●
Z porównania DTFT oraz z-transformaty
widać, że ta ostatnia jest tożsama DTFT
zmodyfikowanego sygnału x[n]:
̃x [n]= x [n]⋅r
−
n
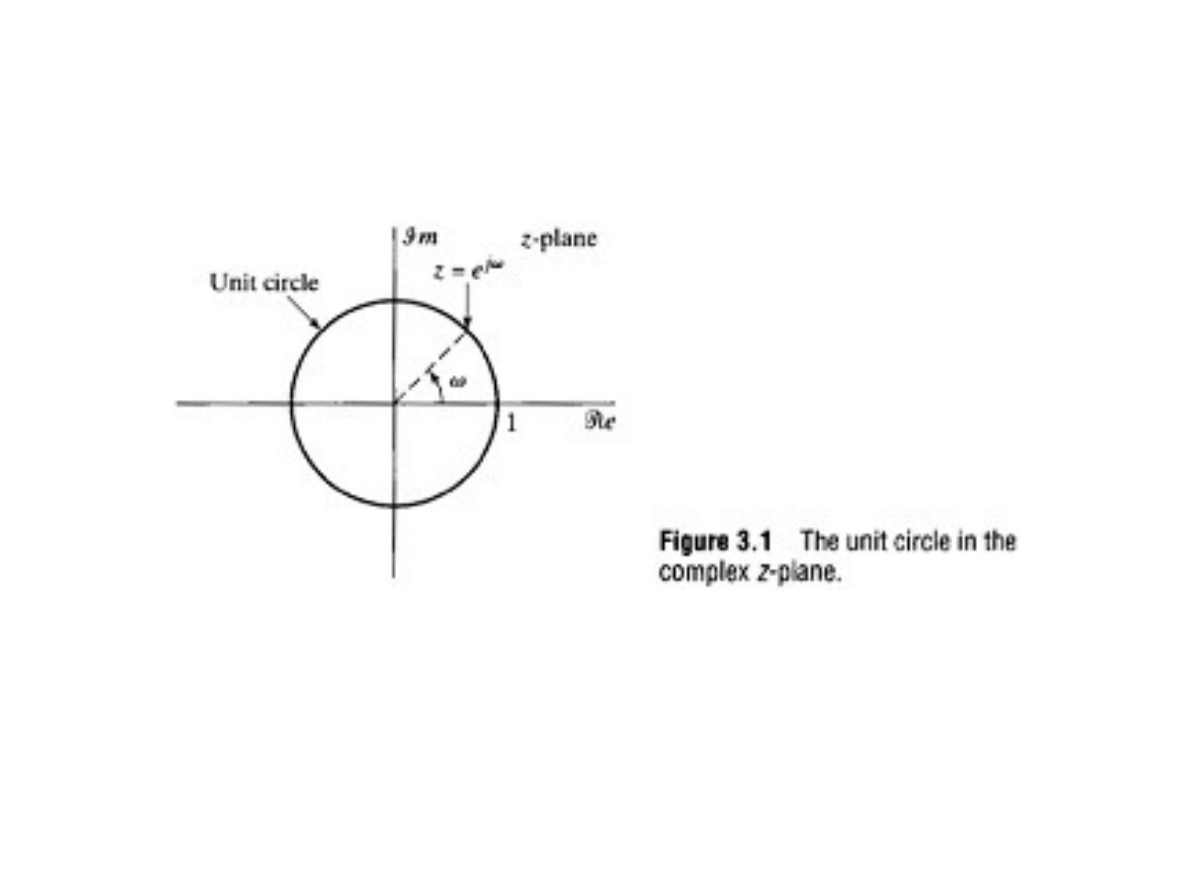
Interpretacja geometryczna
●
DTFT sygnału x[n] jest zbieżna wtedy i tylko
wtedy, gdy ROC jego z-transformaty zawiera
okrąg jednostkowy.

Zbieżność z-transformaty
●
Z-transformata jest bezwzględnie sumowalna
wtedy i tylko wtedy, gdy:
●
Może zatem zajść sytuacja, że dla pewnych
wartości parametru r z-transformata sygnału
x[n] będzie zbieżna, a jego DTFT – nie.
●
Zbiór wszystkich wartości r, dla których z-
transformata jest zbieżna nazywa się obszarem
zbieżności – ROC (Region of Convergence).
∑
n=−∞
∞
∣
x [n] r
−
n
∣
<∞
Zbieżność z-transformaty
●
Zauważmy, że:
∣
X (z)∣=
∑
n=−∞
∞
∣
x [n]∣⋅∣r
−
n
∣=
∑
n=−∞
−
1
∣
x [n] r
−
n
∣+
∑
n=0
∞
∣
x [n]
r
n
∣
=
...
...=
∑
n=1
∞
∣
x [−n]r
n
∣+
∑
n=0
∞
∣
x [n]
r
n
∣
Zbieżność z-transformaty
Zbieżność
∑
n=1
∞
∣
x [−n]⋅r
n
∣
Zbieżność
∑
n=0
∞
∣
x [n]
r
n
∣
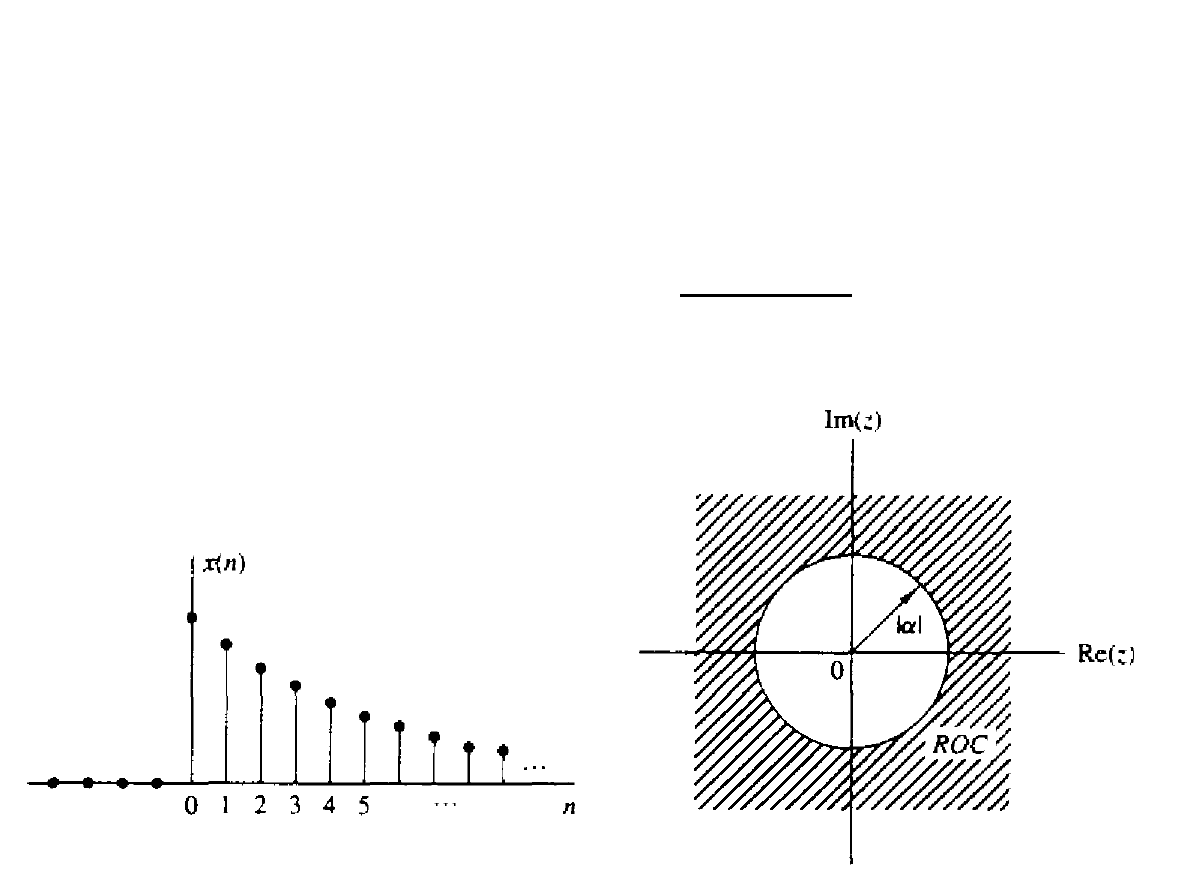
Przykład
●
Wyznaczyć z-transformatę sygnału: x [n]=a
n
⋅
u [n]
X ( z)=
∑
n=0
∞
a
n
⋅
z
−
n
=
∑
n=0
∞
(
a⋅z
−
1
)
n
=
1
1−a⋅z
−
1
; ROC :∣z∣>∣a∣
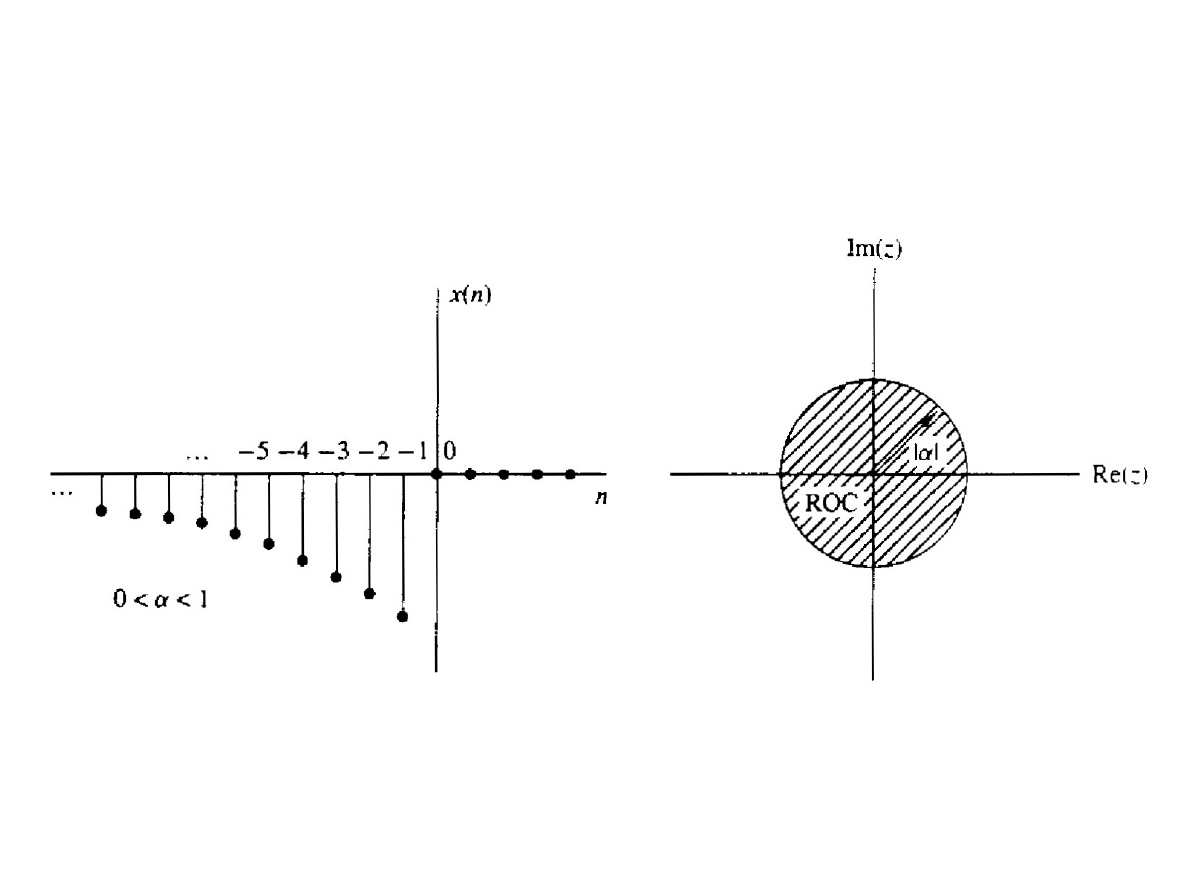
Przykład
●
Wyznaczyć z-transformatę sygnału:
x [n]=−a
n
⋅
u [−n−1]
X ( z)=
∑
n=−∞
−
1
(−
a
n
)⋅
z
−
n
=−
∑
n=1
∞
(
a
−
1
⋅
z)
n
=−
a
−
1
⋅
z
1−a
−
1
⋅
z
=
...
...=
1
1−a⋅z
−
1
; ROC :∣z∣<∣a∣
Przykład (cd.)
Jednoznaczność z-transformaty
●
Istnieją sygnały posiadające identyczną z-
transformatę, np. przyczynowy sygnał u[n]
oraz antyprzyczynowy sygnał u[-n-1]:
●
Zamknięta postać z-transformaty nie pozwala
jednoznacznie odtworzyć sygnału w dziedzinie
czasu – wymagana jest także znajomość
ROC.
Z (u [n])=Z (u [−n−1])=
1
1−z
−
1

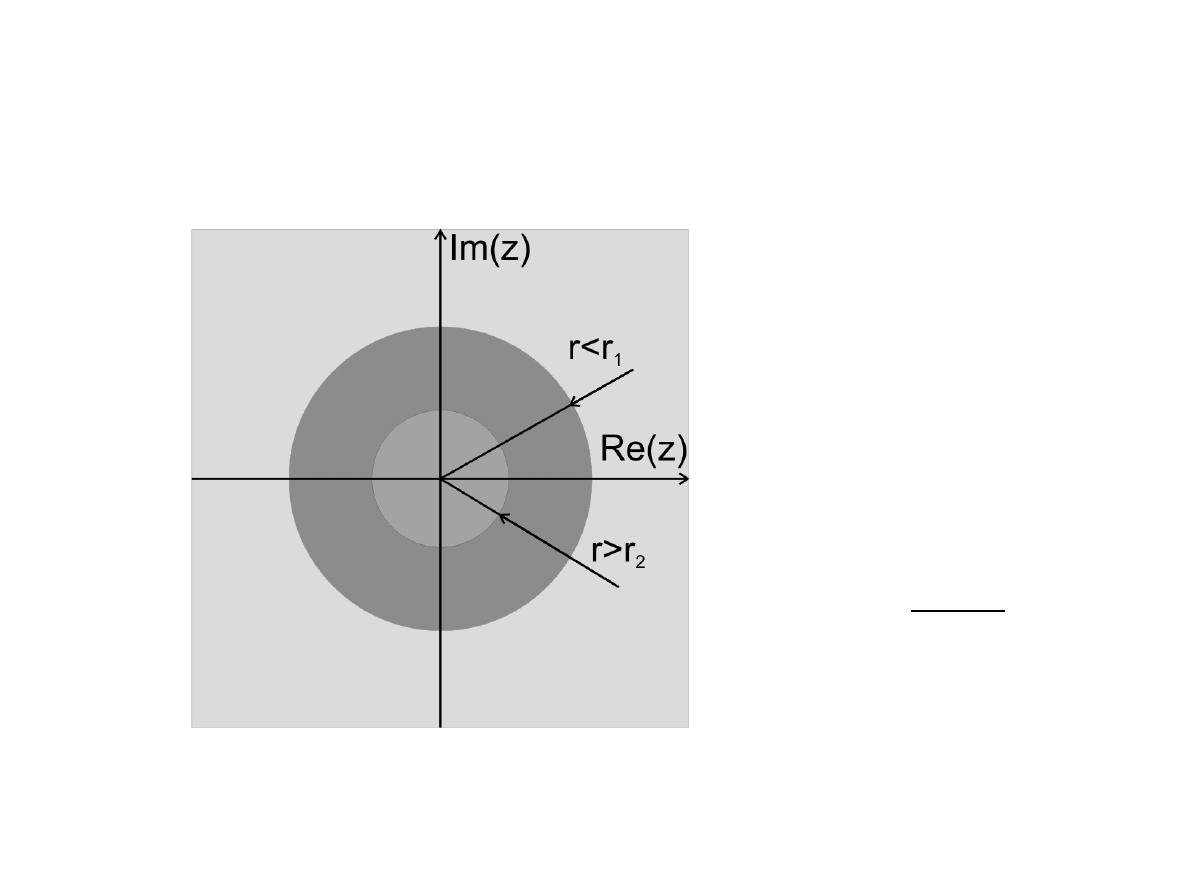
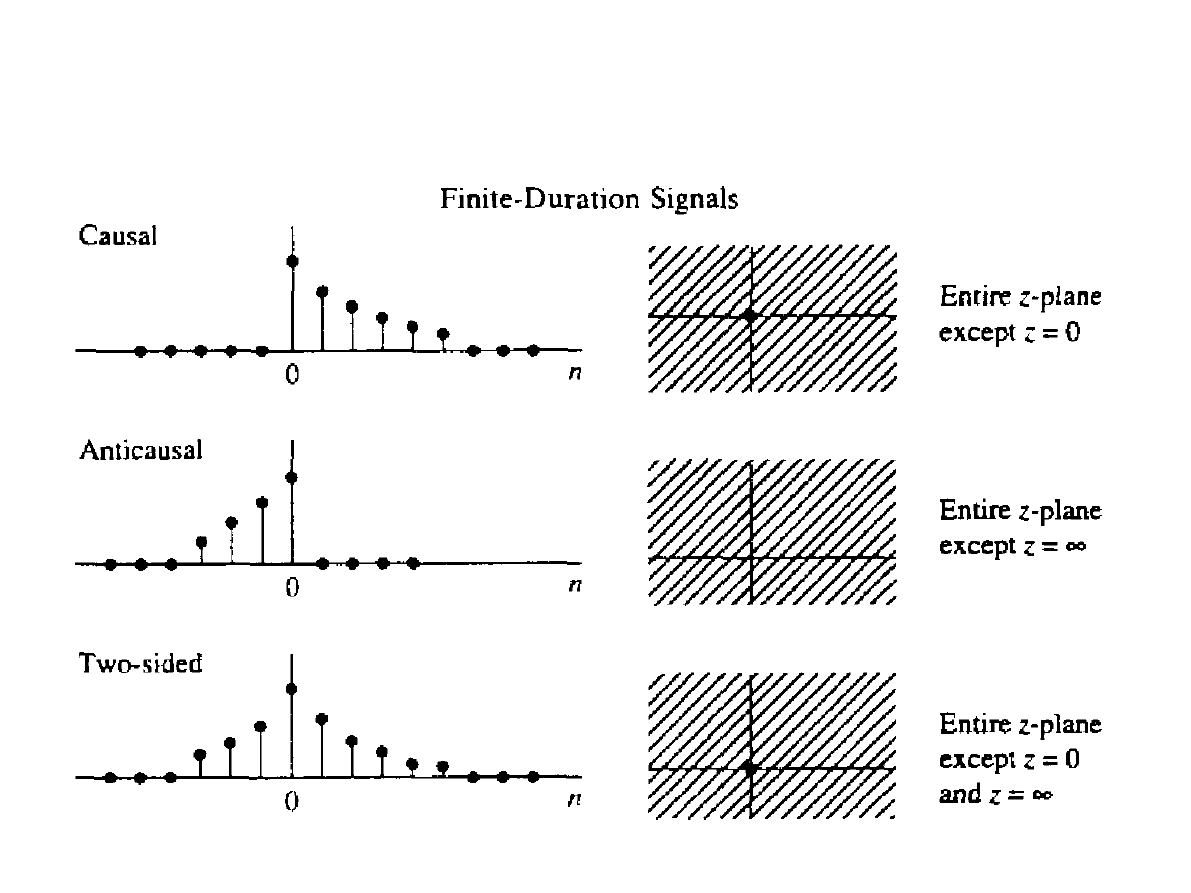
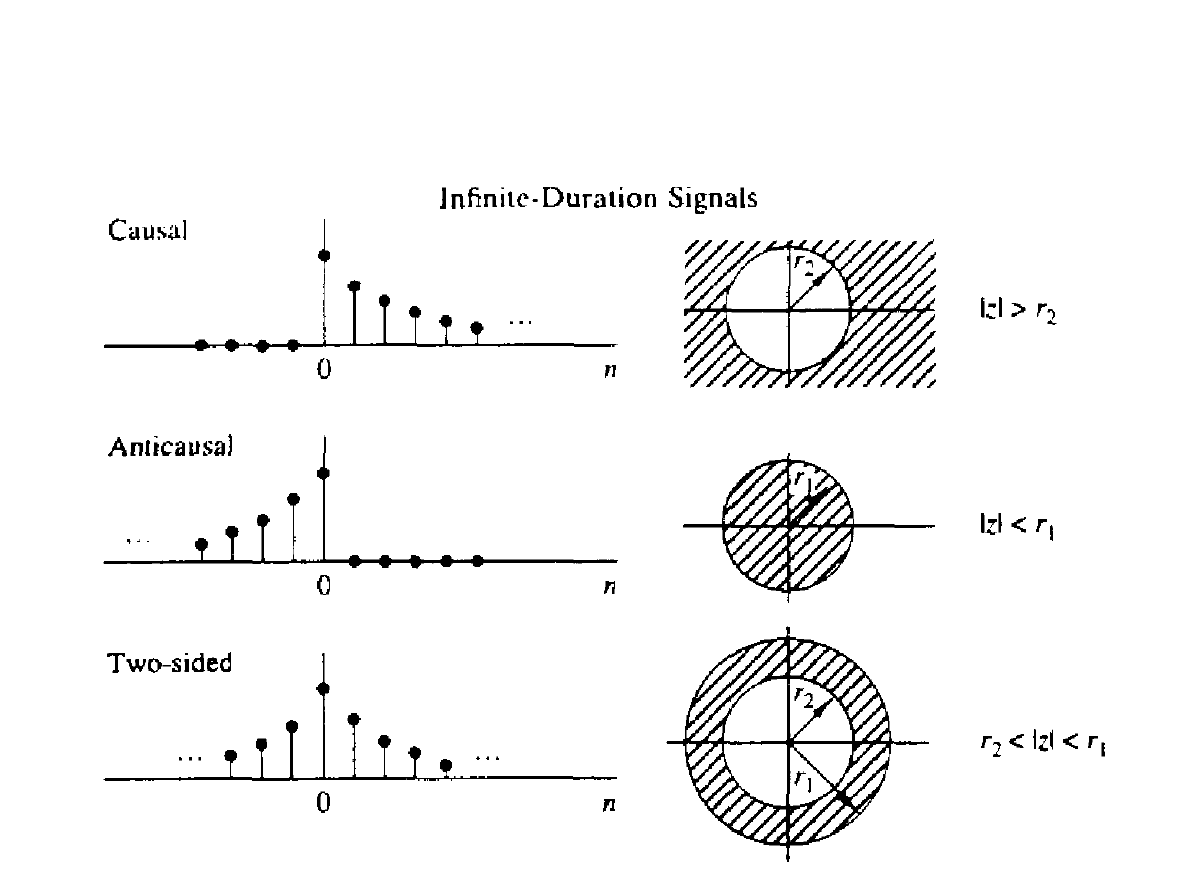
Jednoznaczność z-transformaty
●
Sygnały czasu dyskretnego x[n] są określone
jednoznacznie poprzez podanie ich z-
transformaty X(z) oraz obszaru zbieżności
ROC.
●
ROC sygnałów antyprzyczynowych leży
wewnątrz okręgu o promieniu r
1
, zaś ROC
sygnałów przyczynowych leży poza okręgiem
o promieniu r
2
.
Przykład
●
Wyznaczyć z-transformatę sygnału:
●
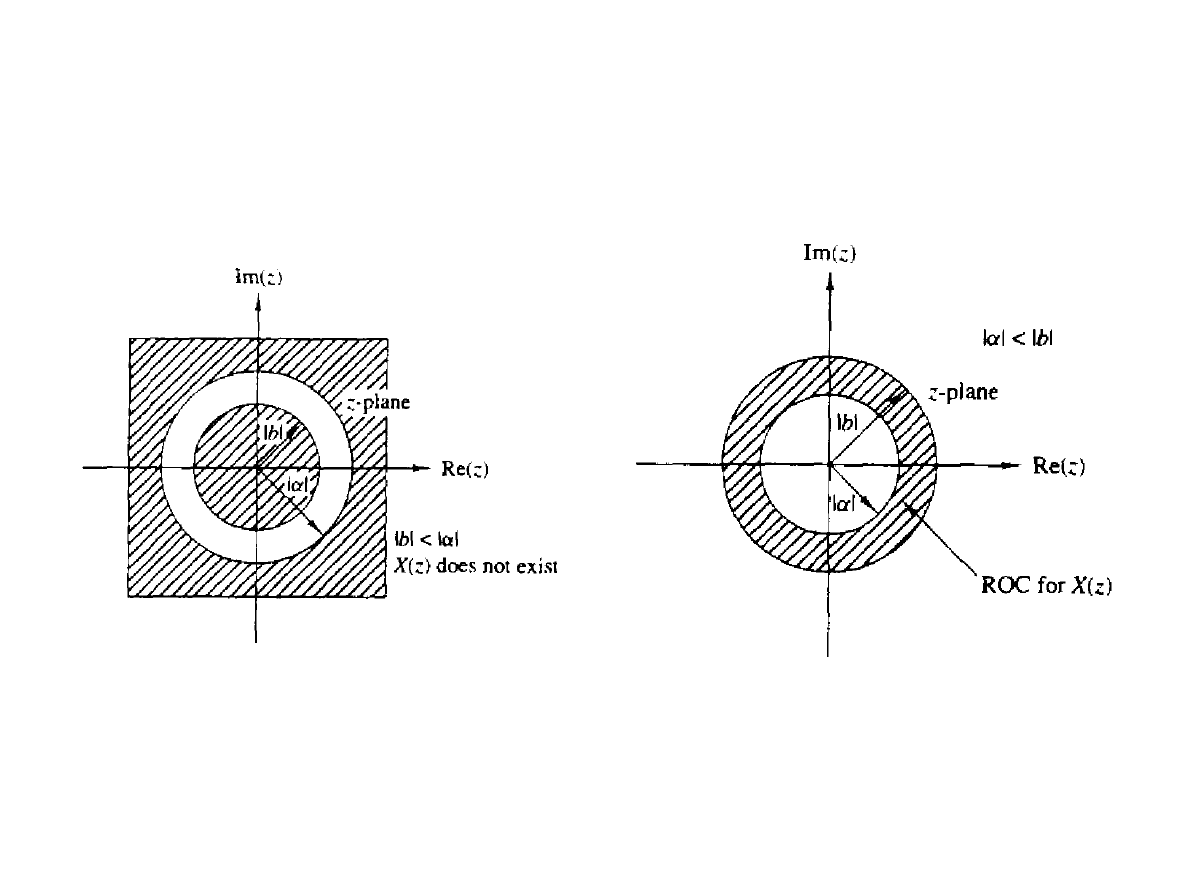
Rozpatrzmy 2 przypadki:
●
|b| < |a|: obszary nie przekrywają się, więc X[z]
nie istnieje,
●
|b| > |a|:
x [n]=a
n
u [n]+b
n
u [−n−1]
X ( z)=
∑
n=0
∞
(
a⋅z
−
1
)
n
+
∑
n=1
∞
(
b
−
1
⋅
z)
n
; ROC :∣z∣>∣a∣,∣z∣<∣b∣
X [ z ]=
1
1−a⋅z
−
1
−
1
1−b⋅z
−
1
=
b−a
a+b− z−a⋅b⋅z
−
1
; ROC :∣a∣<∣z∣<∣b∣
Przykład
Przykład
Przykład
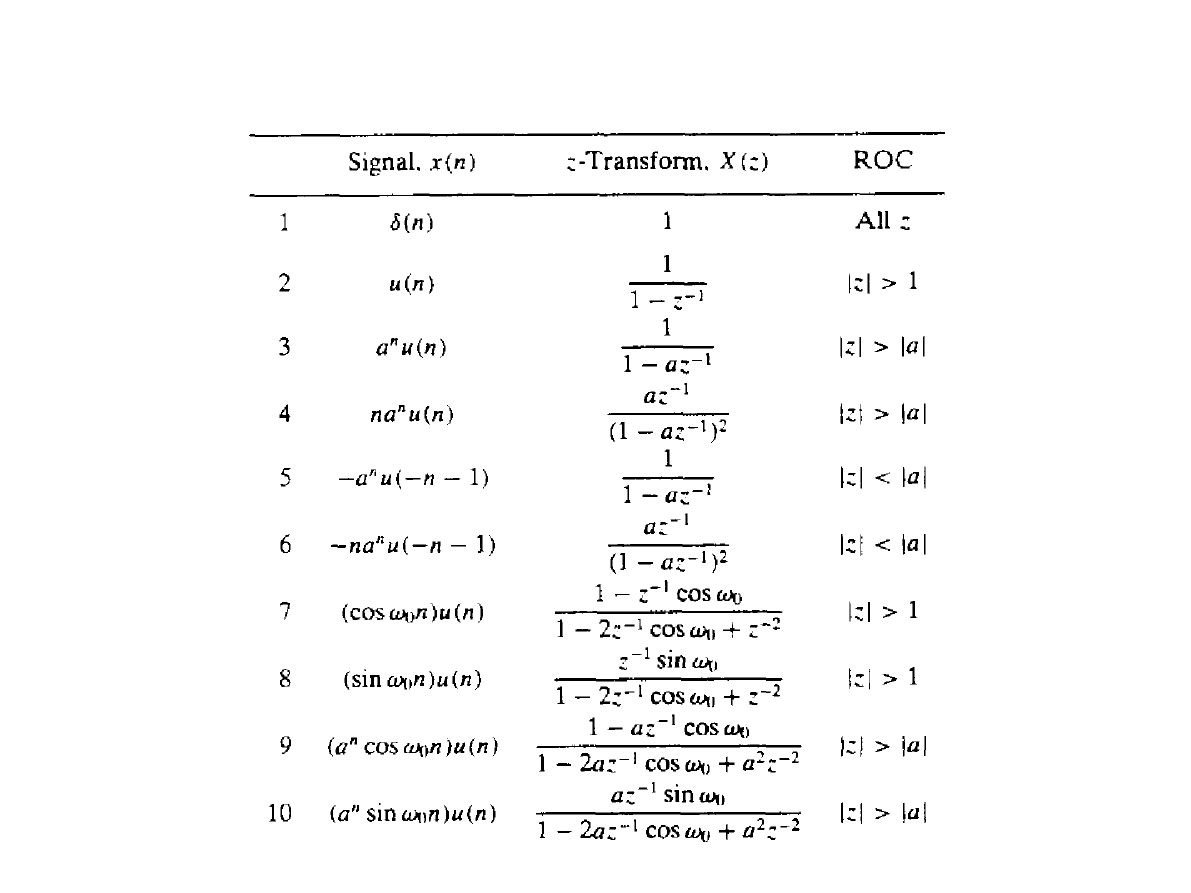
Pary z-transformat
Wymierna z-transformata
●
Wymierna z-transformata opisywana jest
wyrażeniem postaci:
gdzie: M – jest stopniem wielomianu P(z), zaś
N – stopniem wielomianu D(z)
H (z)=
P ( z)
D( z)
=
p
0
+
p
1
z
−
1
+…+
p
M
z
−
M
d
0
+
d
1
z
−
1
+…+
d
N
z
−
N
Wymierna z-transformata
●
Alternatywna postać wymiernej z-transformaty
opisywana jest wyrażeniem:
Lub w postaci iloczynowej:
H (z)=z
(
N −M )
p
0
z
M
+
p
1
z
M −1
+…+
p
M
d
0
z
N
+
d
1
z
N −1
+…+
d
N
H (z)=z
(
N −M )
p
0
d
0
∏
k=1
M
(
z−α
k
)
∏
k=1
N
(
z−β
k
)

Zera i bieguny wymiernej
z-transformaty
●
Zauważmy, że z-transformata w postaci
iloczynowej:
w punktach α
k
przyjmuje wartość zero, zaś w
punktach β
k
dąży do nieskończoności.
●
Wartości α
k
to zera z-transformaty (zeros -
(o)), zaś wartości β
k
– jej bieguny (poles - (x)).
H (z)=z
(
N −M )
p
0
d
0
∏
k=1
M
(
z−α
k
)
∏
k=1
N
(
z−β
k
)
Zera i bieguny z-transformaty
●
Z postaci iloczynowej:
wynika także, że z-transformata posiada (N-M)
zer w początku układu (z=0).
●
Wymierna z-transformata jest całkowicie
reprezentowana przez podanie wzmocnienia
p
0
/d
0
oraz lokalizację biegunów β
k
i zer α
k
.
H (z)=z
(
N −M )
p
0
d
0
∏
k=1
M
(
z−α
k
)
∏
k=1
N
(
z−β
k
)
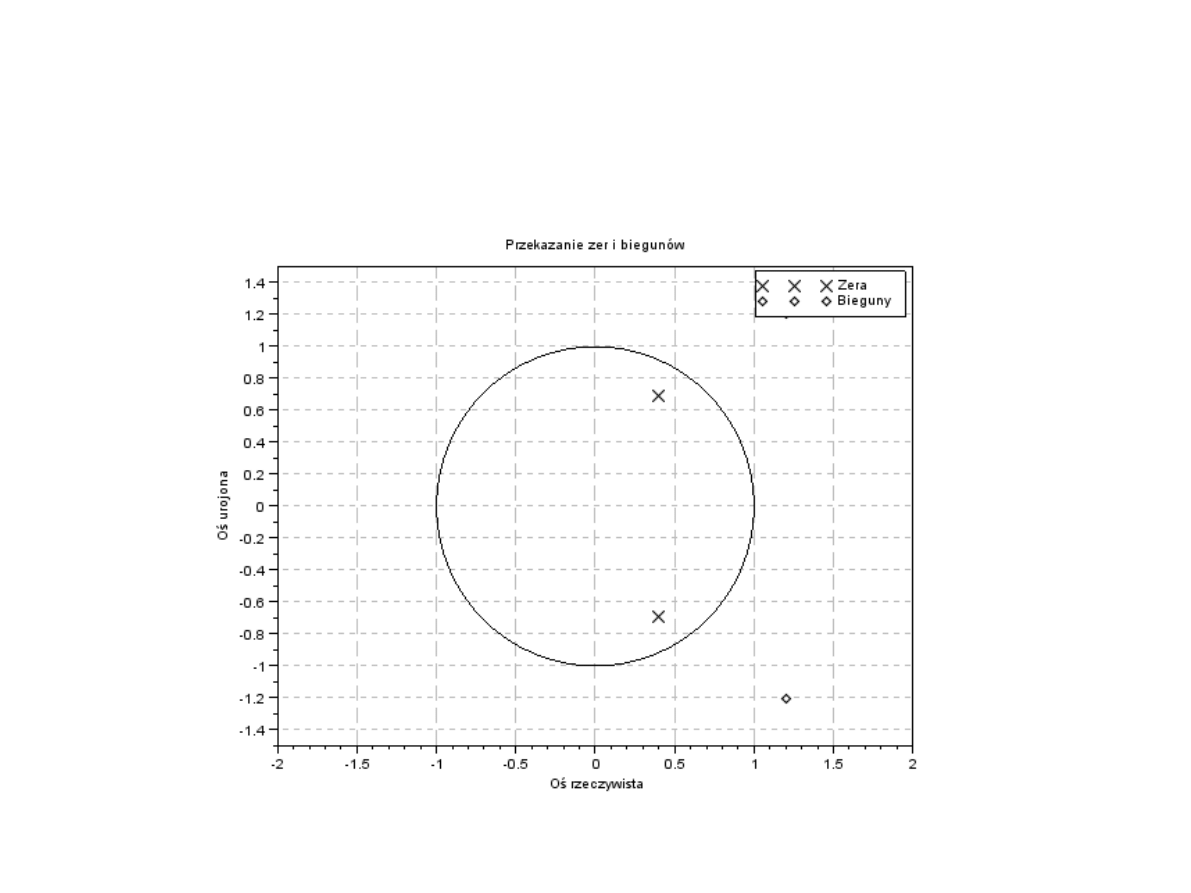
Przykład
●
Wyznaczanie zer i biegunów z-transformaty
postaci:
zera: α = 1.2 ± j1.2
bieguny: β = 0.4 ± j0.69
H (z)=
1−2.4 z
−
1
+
2.88 z
−
2
1−0.8 z
−
1
+
0.64 z
−
2
Przykład

Wymierna z-transformata o
współczynnikach rzeczywistych
●
Zera i bieguny wymiernej z-transformaty o
współczynnikach rzeczywistych są liczbami
zespolonymi parami sprzężonymi:
Fakt ten wykorzystuje się przy projektowaniu
filtrów cyfrowych metodą zer i biegunów z-
transformaty.
(
z−(a+ jb)
)
⋅
(
z−(a− jb)
)
=…
…=
z
2
−
2az+a
2
+
b
2
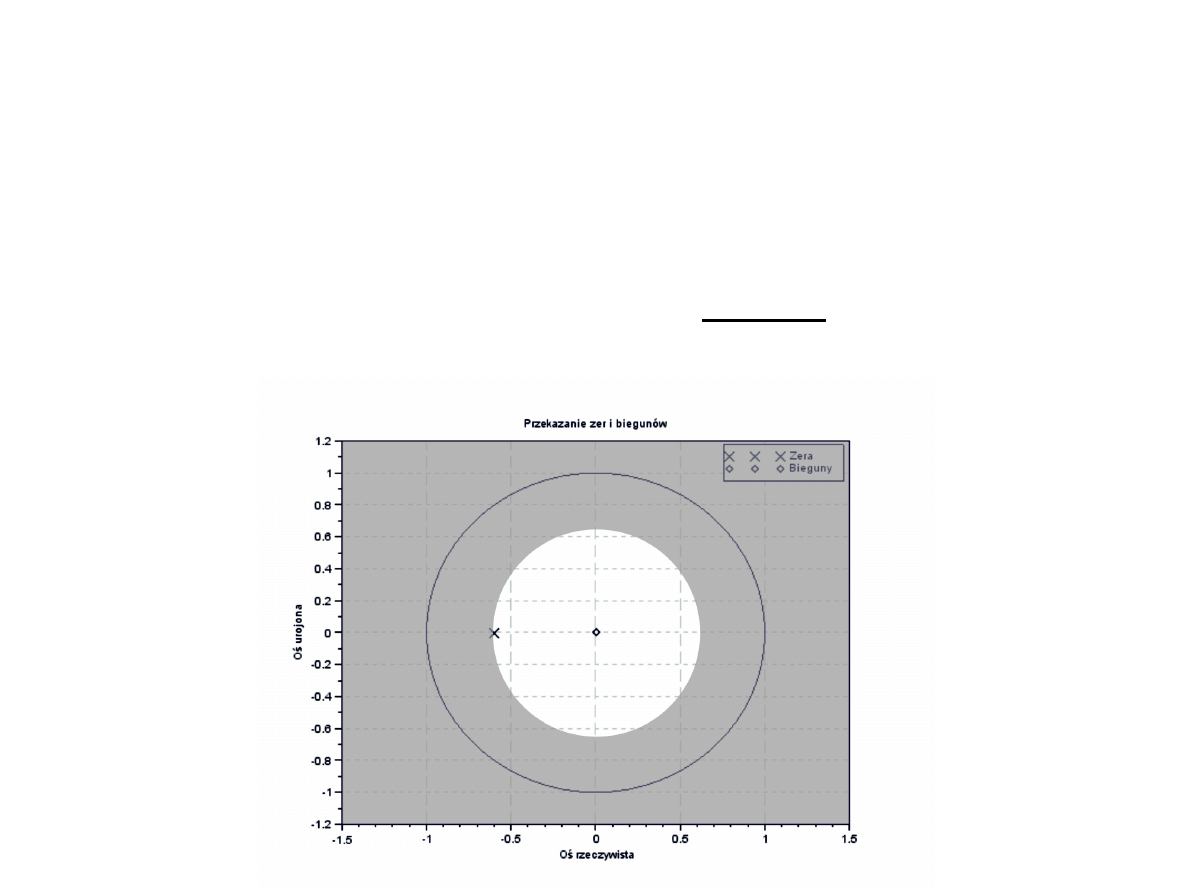
Obszar zbieżności
wymiernej z-transformaty
●
Określmy ROC z-transformaty sygnału:
h[n]=(−0.6)
n
u [n] , H ( z)=
z
z +0.6
⇔
|z|>0.6

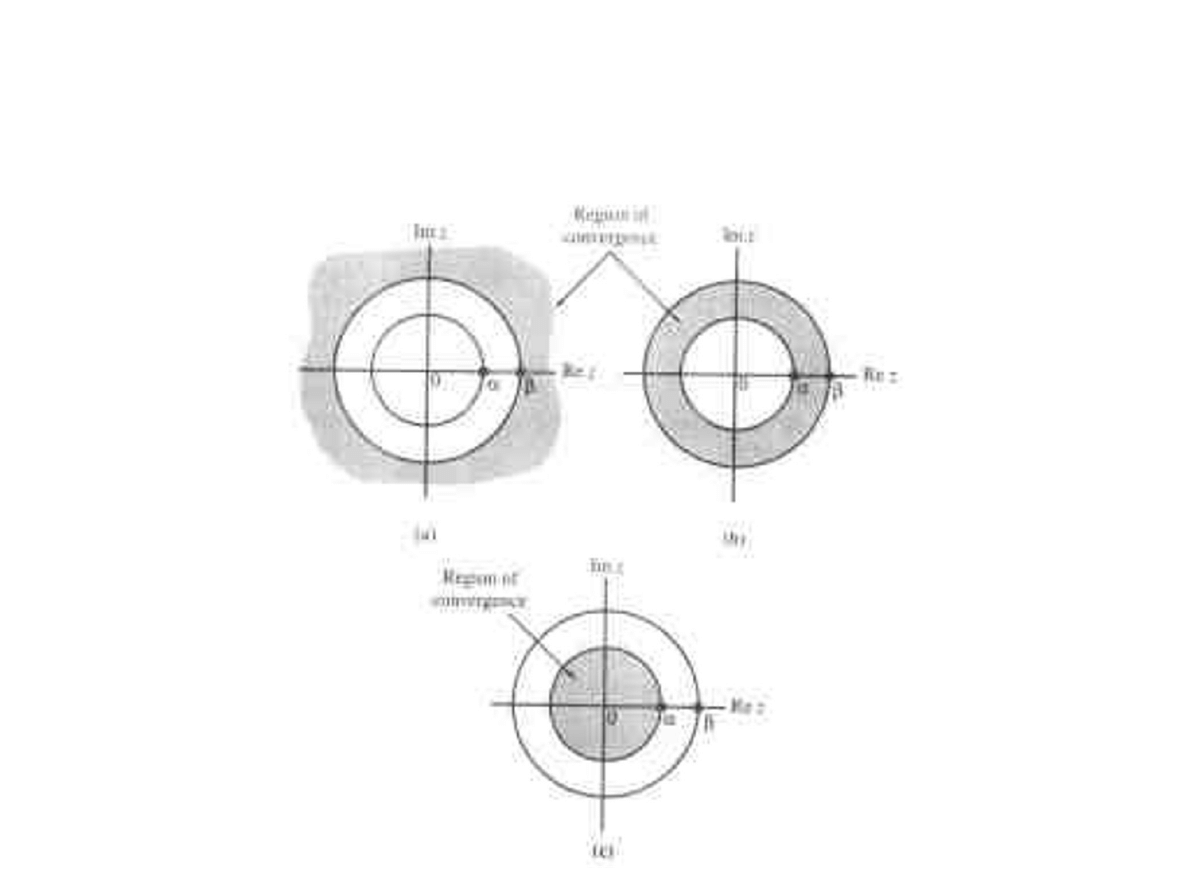
ROC wymiernej z-transformaty
●
ROC z-transformaty sygnału prawostronnego
postaci:
jest określona warunkiem:
●
ROC z-transformaty sygnału lewostronnego:
●
Jest określona warunkiem:
x [n]=
(
a (α)
n
+
b(β)
n
)
u [n− N
0
]
,∣α∣<∣β∣
∣β∣<∣
z∣<∞
x [n]=
(
a (α)
n
+
b(β)
n
)
u [−n− N
0
]
,∣α∣<∣β∣
0≤∣z∣<∣α∣
ROC wymiernej z-transformaty
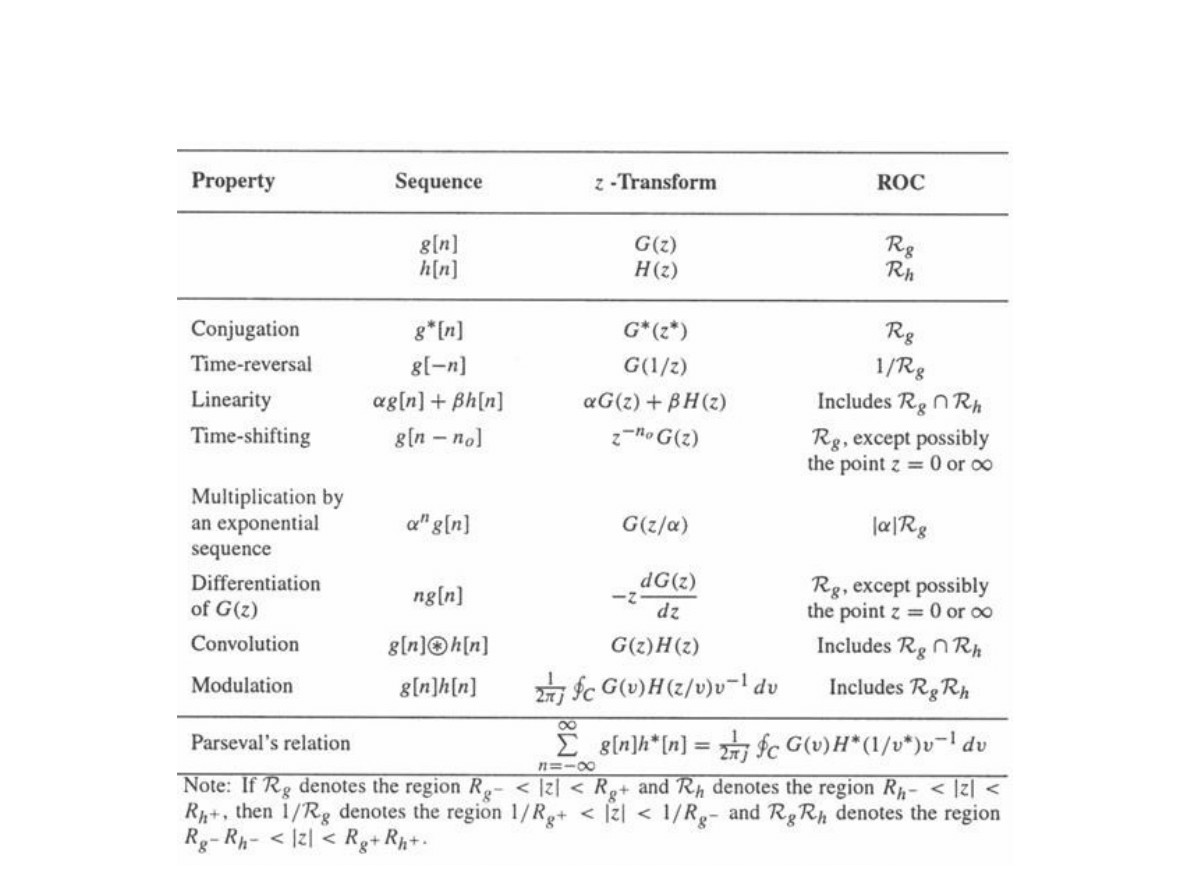
Własności z-transformaty

Odwrotna z-transformata
●
W wielu aspektach technicznych związanych z
przetwarzaniem sygnału istotnego znaczenia
nabiera problem odwracania z-transformaty,
czyli przejścia od X(z) do x[n].
●
Odwracanie z-transformaty odbywa się
zasadniczo metodami:
–
całek Cauchy'ego,
–
tablicową,
–
rozkładu na ułamki proste,
–
długiego dzielenia.
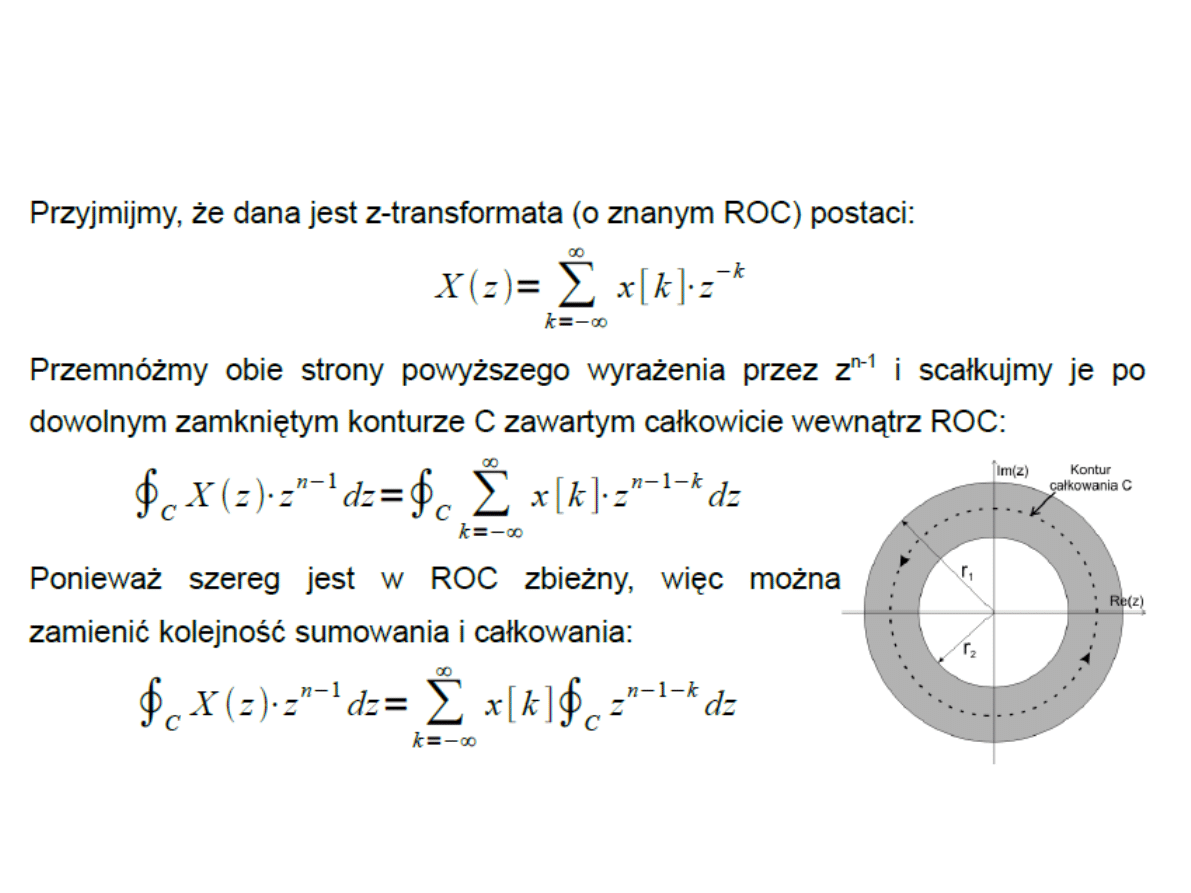
Metoda całek Cauchy'ego
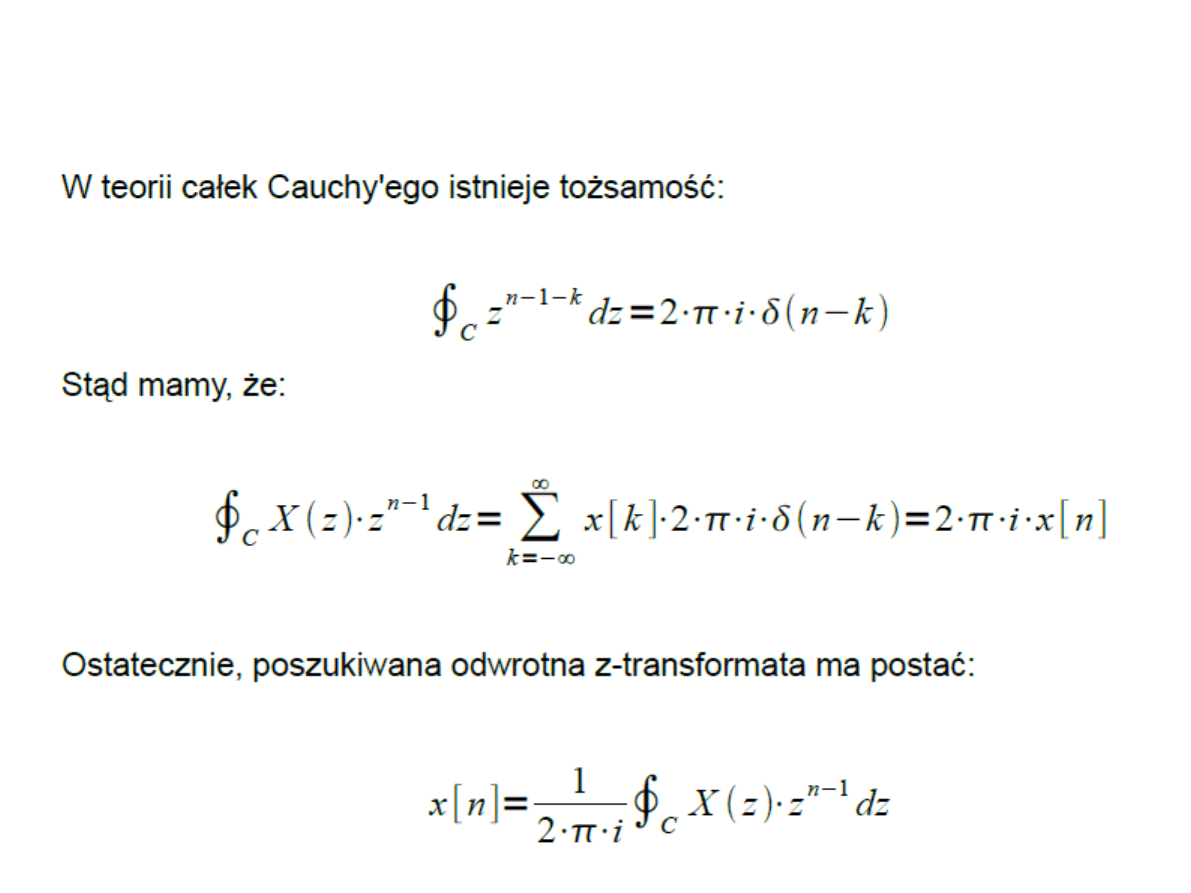
Metoda całek Cauchy'ego

Metoda tablicowa
●
Najprostszą metodą jest doprowadzenie danej z-
transformaty do postaci ujętej w tablicach i
skorzystanie z gotowego wyrażenia na odwrotną
z-transformatę funkcji.
●
Ponieważ z-transformata jest przekształceniem
liniowym, wystarczy przedstawić ją jako
kombinację liniową z-transformat elementarnych.
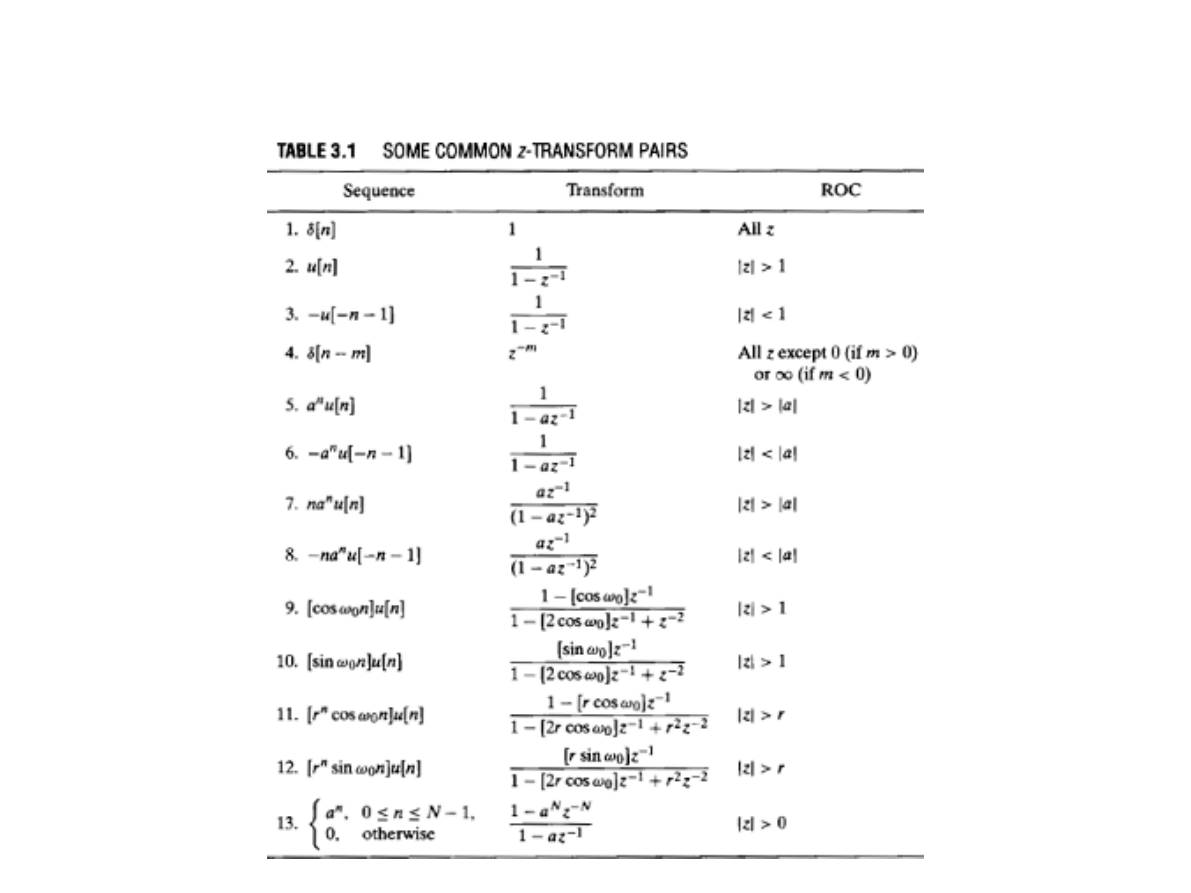
Tablica par z-transformat
Przykład
●
Znaleźć odwrotną z-transformatę funkcji:
●
Przekształćmy powyższe wyrażenie do postaci:
●
Porównując z danymi z tabeli znajdujemy, że:
H (z)=
0.5z
z
2
−
z+0.25
∣
z∣>0.5
H (z)=
0.5z
−
1
(
1−0.5z
−
1
)
2
h[n]=n(0.5)
n
u [n]

Metoda rozkładu na ułamki proste
●
Obszarem zbieżności wymiernej z-transformaty
H(z) sygnału przyczynowego h[n] jest obszar
leżący na zewnątrz koła.
●
Metoda rozszerzania ułamków częściowych
polega rozbijaniu funkcji H(z) na sumę
prostszych wyrazów, których odwrotne z-
transformaty można znaleźć np. metodą
tablicową.
Rozkładanie na ułamki proste
●
Wymierna z-transformata dana jest wyrażeniem:
●
Jeśli M≥N, wówczas funkcja wymierna H(z) jest
ułamkiem niewłaściwym.
●
Można w takiej sytuacji dokonać dzielenia
wielomianu P(z) przez D(z) i zapisać wynik w
postaci zawierającej ułamek właściwy P
1
/D:
H (z)=
∑
k=0
M −N
α
k
z
−
k
+
P
1
(
z)
D( z)
H (z)=
P ( z)
D( z)
=
p
0
+
p
1
z
−
1
+…+
p
M
z
−
M
d
0
+
d
1
z
−
1
+…+
d
N
z
−
N
Przykład
●
Dany jest ułamek niewłaściwy postaci:
●
Dokonując długiego dzielenia wielomianów
otrzymamy ostatecznie, że:
H (z)=
2+0.8 z
−
1
+
0.5 z
−
2
+
0.3 z
−
3
1+0.8 z
−
1
+
0.2 z
−
2
H (z)=−3.5+1.5 z
−
1
+
5.5+2.1 z
−
1
1+0.8z
−
1
+
0.2z
−
2
Wydzielanie ułamka właściwego
1.5 z
−
1
−
3.5
0.3 z
−
3
+
0.5 z
−
2
+
0.8 z
−
1
+
2: 0.2 z
−
2
+
0.8 z
−
1
+
1
−(
0.3 z
−
3
+
1.2 z
−
2
+
1.5 z
−
1
)
= −
0.7 z
−
2
−
0.7 z
−
1
+
2
−
0.7 z
−
2
−
2.8 z
−
1
−
3.5
=
2.1 z
−
1
+
5.5
Reszta z dzielenia
Odwrotna
kolejność!!!
Część wydzielona

Bieguny pojedyncze
●
Gdy H(z) jest ułamkiem właściwym z
pojedynczymi, rozdzielonymi biegunami λ
k
,
można ją wówczas przedstawić w postaci
sumy ułamków prostych:
●
Stałe r
k
w powyższym wzorze to tzw. residua
funkcji H(z).
H (z)=
∑
k=1
N
r
k
1−λ
k
z
−
1

Residua
●
Wartości residuów obliczamy ze wzoru:
●
Ponieważ zakładamy przyczynowość
badanych sygnałów (ROC: |z| > |λ
k
|), zatem:
r
k
=(
1−λ
k
z
−
1
)⋅
H ( z)∣
z=λ
k
H (z)=
∑
k=1
N
r
k
1−λ
k
z
−
1
⇒
Z
−
1
g [n]=
∑
k=1
N
r
k
(λ
k
)
n
u [n]
Przykład
●
Znaleźć odwrotną z-transformatę funkcji:
●
Funkcja ma dwa rozdzielone bieguny: -0.6, 0.2
●
Dokonujemy rozkładu na ułamki proste:
H (z)=
1+2z
−
1
(
1−0.2z
−
1
)(
1+0.6z
−
1
)
H (z)=
r
1
1−0.2z
−
1
+
r
2
1+0.6z
−
1
Przykład
●
Obliczamy wartości residuów:
●
Poszukiwana odwrotna z-transformata ma
więc postać:
r
1
=(
1+0.6z
−
1
)
H ( z)∣
z=−0.6
=
1+2z
−
1
1−0.2z
−
1
∣
z=−0.6
=−
1.75
r
2
=(
1−0.2z
−
1
)
H (z)∣
z=0.2
=
1+2z
−
1
1+0.6z
−
1
∣
z=0.2
=
2.75
h[n]=−1.75(−0.6)
n
u [n]+2.75(0.2)
n
u [n]
Przykład
●
Wartości residuów można także obliczyć
doprowadzając sumę ułamków prostych z
powrotem do postaci wyjściowej i porównując
wartości powstałych wyrażeń:
H ( z)=
r
1
1−0.2z
−
1
+
r
2
1+0.6z
−
1
=…
…=
(
r
1
+
r
2
)+(−
0.2 r
1
+
0.6 r
2
)
z
−
1
(
1−0.2z
−
1
)(
1+0.6z
−
1
)
=
1+2z
−
1
(
1−0.2z
−
1
)(
1+0.6z
−
1
)
{
r
1
+
r
2
=
1
−
0.2 r
1
+
0.6 r
1
=
2
⇒
{
r
1
−
1.75
r
2
=
2.75

Bieguny wielokrotne
●
Gdy H(z) jest ułamkiem właściwym z L-krotnym
biegunem λ
1
, i pozostałymi biegunami
pojedynczymi, należy ją wówczas przedstawić w
postaci:
H (z)=
∑
k=1
L
β
k
(
1−λ
1
z
−
1
)
k
+
∑
k=2
N − L+1
r
k
1−λ
k
z
−
1
Bieguny wielokrotne
●
Stałe β
k
w powyższym wzorze (nie będące
residuami dla k>1) oblicza się ze wzoru:
●
Użyteczny wzór dla biegunów podwójnych:
β
k
=
1
(
L−k )! (−λ
1
)
L−k
d
L−k
d ( z
−
1
)
L−k
(
(
1−λ
1
z
−
1
)
L
H (z)
)
∣
z=λ
1
H (z)=
1
(
1−λ z
−
1
)
2
⇔
Z
h [n]=(n+1)(λ)
n
u [n]
Przykład
●
Dana jest funkcja H(z) postaci:
H ( z)=
1
(
1−
1
2
z
−
1
)(
1+
1
3
z
−
1
)
2
=
...
...=
r
1
1−
1
2
z
−
1
+
β
1
1+
1
3
z
−
1
+
β
2
(
1+
1
3
z
−
1
)
2
=
...
...=
0.36
1−
1
2
z
−
1
+
0.24
1+
1
3
z
−
1
+
0.4
(
1+
1
3
z
−
1
)
2

Metoda długiego dzielenia
wielomianów
●
Istotą tej metody jest przedstawienie funkcji
wymiernej w postaci szeregu potęgowego z
-k
,
gdy sygnał jest przyczynowy, i z
k
, gdy sygnał
jest antyprzyczynowy.
●
Z własności z-transformaty wynika, że
współczynnik stojący przy wyrazie z
-k
jest
jednocześnie poszukiwaną k-tą próbką
sygnału h[n].
●
Metoda długiego dzielenia prowadzi zwykle do
nieskończonych szeregów potęgowych
zmiennej z
-k
.
Przykład
●
Wyznaczyć odwrotną z-transformatę funkcji
metodą długiego dzielenia wielomianów:
H (z)=
z
−
1
1−2z
−
1
+
z
−
2
,∣z∣>1

Przykład
z
−
1
+
2 z
−
2
+
3 z
−
3
+…
z
−
1
:1−2 z
−
1
+
z
−
2
−(
z
−
1
−
2 z
−
2
+
z
−
3
)
=
2 z
−
2
−
z
−
3
−(
2 z
−
2
−
4 z
−
3
+
2 z
−
4
)
=
3 z
−
3
−
2z
−
4
H (z)=0+ z
−
1
+
2 z
−
2
+
3 z
−
3
+…
h[n]=[0 ,1, 2, 3,…]

Funkcja przenoszenia
●
Funkcja odpowiedzi częstotliwościowej H(e
jω
)
układu LTI jest transformatą DTFT jego
odpowiedzi impulsowej h[n].
●
Funkcja odpowiedzi częstotliwościowej zawiera
kompletną informację o zachowaniu się układu w
dziedzinie częstotliwości, jednak z uwagi na
zespoloną postać, trudno nią manipulować przy
kształtowaniu charakterystyk filtrów.
●
Z drugiej strony, z-transformata jest wielomianem
zmiennej z
-1
i dla rzeczywistych h[n] jest
wielomianem o współczynnikach rzeczywistych.

Funkcja przenoszenia
●
Wiemy, że:
●
Funkcja przenoszenia H(z) dana jest jako:
●
Jest to więc funkcja wymierna zmiennej z
y [n]=
∑
k=−∞
∞
x [n] h[n−k ]
Y (z)= X ( z) H ( z)
H (z)=
Y ( z)
X ( z)

Funkcja przenoszenia filtrów FIR
●
W przypadku filtrów FIR ich odpowiedź
impulsowa zawiera skończoną liczbę próbek,
a odpowiedź układu ma postać:
●
Funkcja przenoszenia ma zatem postać:
y [n]=
∑
k=N
1
N
2
x [k ] h[n−k ]
H (z)=
∑
k=N
1
N
2
h[k ] z
−
k

Funkcja przenoszenia filtrów IIR
●
Filtry IIR opisywane są równaniami
różnicowymi o stałych współczynnikach:
●
Po zastosowaniu z-transformaty, otrzymujemy
wyrażenie:
∑
k=0
N
a
k
y [n−k ]=
∑
k=0
M
b
k
x [n−k ]
∑
k=0
N
a
k
z
−
k
Y ( z)=
∑
k=0
M
b
k
z
−
k
X ( z)
Funkcja przenoszenia filtrów IIR
●
Stąd, po przekształceniach funkcja przenoszenia
ma postać:
●
Ponieważ odpowiedź jest sygnałem
przyczynowym, ROC tej funkcji spełnia warunek:
H (z)=
Y ( z)
X ( z)
=
∑
k=0
M
b
k
z
−
k
∑
k=0
N
a
k
z
−
k
∣
z∣>max
k
∣λ
k
∣

Stabilność filtrów
●
Filtry z odpowiedzią impulsową h[n] są
stabilne wtedy, gdy:
●
Często trudno jednak sprawdzić ten warunek
wprost, zatem kryterium stabilności
wyprowadza się w oparciu o położenie
biegunów funkcji przenoszenia H(z).
∑
k=−∞
∞
∣
h[n]∣<∞

Stabilność filtrów
●
Jeśli ROC funkcji przenoszenia filtru LTI
zawiera koło jednostkowe, filtr jest stabilny w
sensie BIBO.
●
Wszystkie bieguny stabilnej funkcji
przenoszenia H(z) filtra przyczynowego
muszą leżeć wewnątrz koła jednostkowego.
●
Wszystkie bieguny stabilnej funkcji
przenoszenia H(z) filtra antyprzyczynowego
muszą leżeć na zewnątrz koła
jednostkowego.
Document Outline
- Slajd 1
- Slajd 2
- Slajd 3
- Slajd 4
- Slajd 5
- Slajd 6
- Slajd 7
- Slajd 8
- Slajd 9
- Slajd 10
- Slajd 11
- Slajd 12
- Slajd 13
- Slajd 14
- Slajd 15
- Slajd 16
- Slajd 17
- Slajd 18
- Slajd 19
- Slajd 20
- Slajd 21
- Slajd 22
- Slajd 23
- Slajd 24
- Slajd 25
- Slajd 26
- Slajd 27
- Slajd 28
- Slajd 29
- Slajd 30
- Slajd 31
- Slajd 32
- Slajd 33
- Slajd 34
- Slajd 35
- Slajd 36
- Slajd 37
- Slajd 38
- Slajd 39
- Slajd 40
- Slajd 41
- Slajd 42
- Slajd 43
- Slajd 44
- Slajd 45
- Slajd 46
- Slajd 47
- Slajd 48
- Slajd 49
- Slajd 50
- Slajd 51
- Slajd 52
- Slajd 53
- Slajd 54
- Slajd 55
- Slajd 56
- Slajd 57
- Slajd 58
- Slajd 59
Wyszukiwarka
Podobne podstrony:
DSP 05 Transformaty ortogonalne
80 Nw 06 Transformatory
80 Nw 06 Transformatory
notatki pracownia olej transformatorowy 06 05 11
DSP Wyk%b3ad 06 UWM
06 Heat transfer
Alan Dean Foster Spellsinger 06 The Time Of The Transferance
Ćw 06 Odpowiedź immunologiczna typu komórkowego Transformacja blastyczna
89 Nw 06 Zasilacze transformatorowe
MT st w 06
T7 Transformacja układu odniesienia
11 BIOCHEMIA horyzontalny transfer genów
Kosci, kregoslup 28[1][1][1] 10 06 dla studentow
06 Kwestia potencjalności Aid 6191 ppt
06 Podstawy syntezy polimerówid 6357 ppt
06
więcej podobnych podstron