
1
Wykład 6
MECHANIKA TEORETYCZNA
Studia stacjonarne I stopnia – rok akademicki 2013/14
Autor:
Henryk Laskowski
Katedra Podstaw Mechaniki Ośrodków Ciągłych
Instytut Mechaniki Budowli
Wydział Inżynierii Lądowej
KINEMATYKA PUNKTU MATERIALNEGO
2
1.1. Ogólna klasyfikacja
MECHANIKA – dział fizyki poświęcony badaniu ruchów i stanów
równowagi ciał. Obejmuje statykę, kinematykę
i dynamikę
Statyka
– dział mechaniki badający prawa równowagi
ciał będących pod działaniem sił
Kinematyka – dział mechaniki zajmujący się opisem ruchu
ciał bez uwzględnienia jego przyczyn oraz
cech fizycznych ciał.
Dynamika
– dział mechaniki badający ruch ciał
materialnych pod wpływem działających
na nie sił
Statyka
– dział mechaniki badający prawa równowagi
ciał będących pod działaniem sił
Dynamika
– dział mechaniki badający ruch ciał
materialnych pod wpływem działających
na nie sił

Część 1
Równania ruchu punktu
4
1.1. Układy odniesienia
Układ odniesienia
– rzeczywiste lub umowne ciało sztywne, względem
którego
opisuje się ruch innych ciał. Z układem odniesienia jest
związany
układ współrzędnych
x
y
z
x
y
z
5
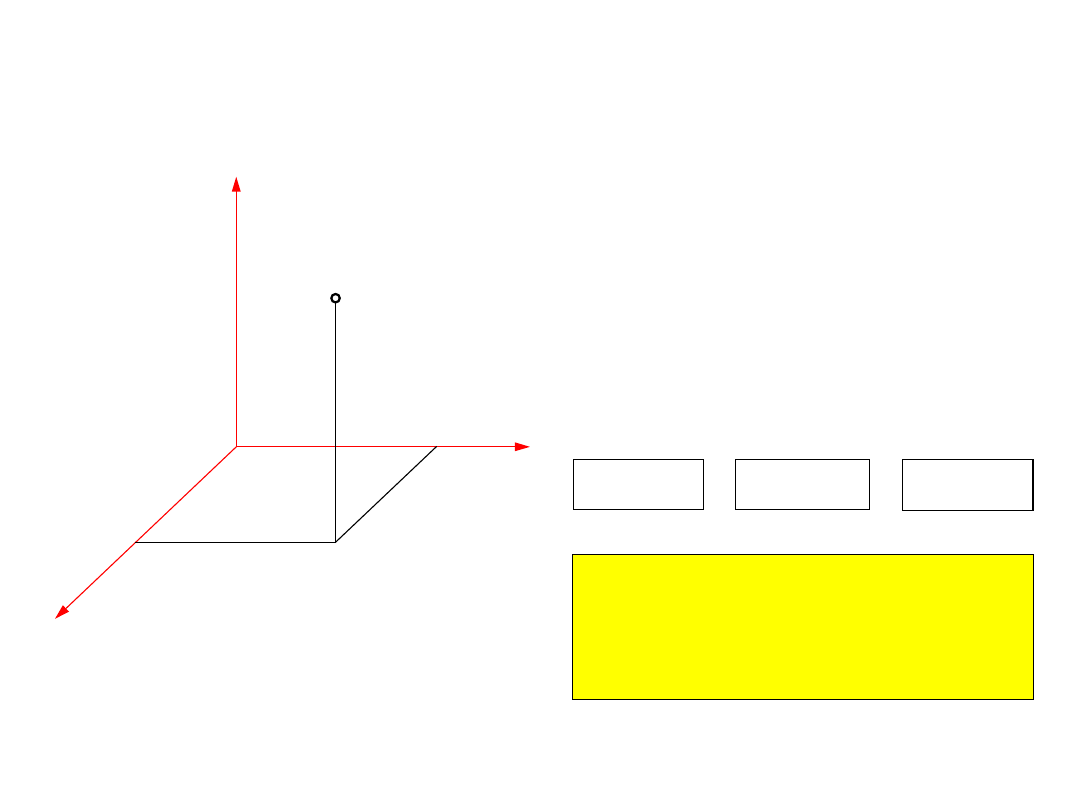
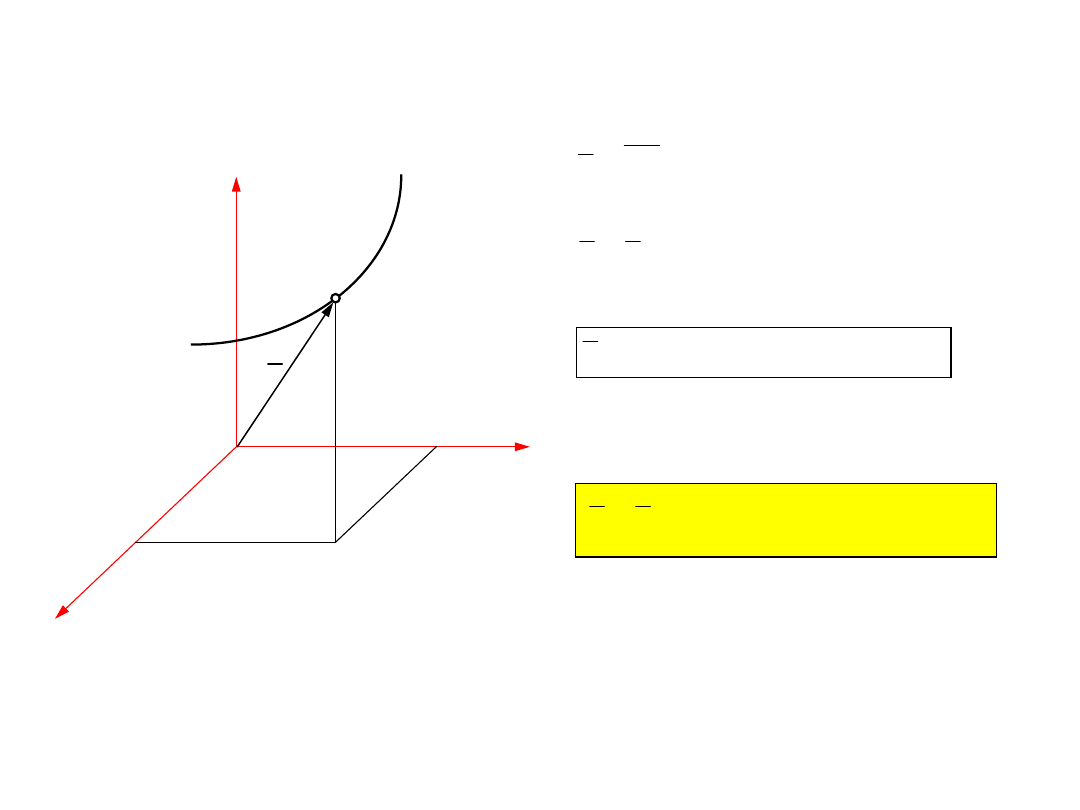
1.2. Równania ruchu w prostokątnym układzie
współrzędnych
x
y
z
A
x
A
y
A
z
A
O
A
A
A
x , y , z
- współrzędne punktu
A
w prostokątnym
układzie współrzędnych
Gdy punkt
A
zmienia swoje
położenie w czasie to
x
A
, y
A
, z
A
są
pewnymi funkcjami czasu
( )
A
x
f t
=
1
( )
A
y
f t
=
2
( )
A
z
f t
=
3
Powyższe równania są równaniami
ruchu punktu
A
w prostokątnym
układzie współrzędnych.
Jest to tzw. skalarny opis ruchu
6
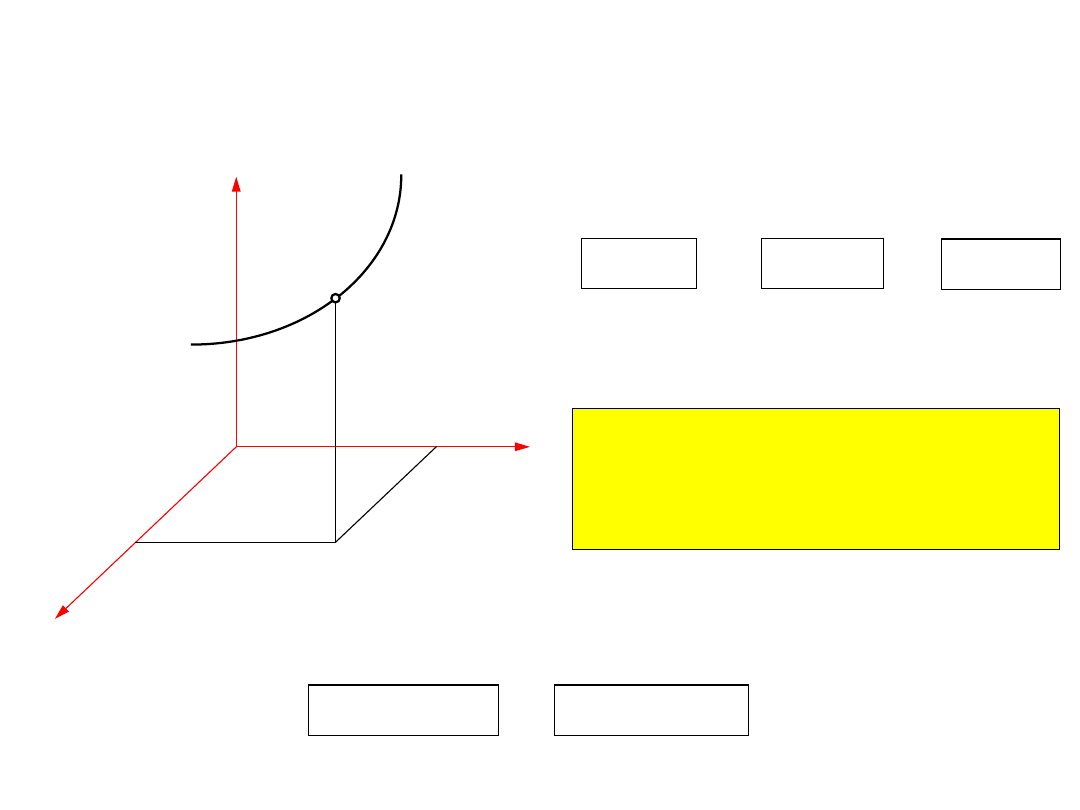
x
y
z
A
x
A
y
A
z
A
O
Jeśli założy się, że
t
jest parametrem
to równania:
( )
x f t
=
1
( )
y f t
=
2
( )
z f t
=
3
są równaniami toru punktu
A
Tor punktu
jest to zbiór wszystkich chwilowych
położeń punktu w trakcie trwania
ruchu
Po wyrugowaniu czasu z równań parametrycznych otrzymuje
się układ dwóch równań, które są równaniem krawędziowym
toru:
(
)
F x, y, z =
1
0
(
)
F x, y, z =
2
0
7
x
y
z
A
x
A
y
A
z
A
O
r
- wektor wodzący punktu A
( )
( )
( )
r
f t i f t j f t k
=
�+
�+
�
1
2
3
r OA
=
( )
r r t
=
- funkcja wektorowa
( )
r r t
=
- wektorowy opis
ruchu
8
x
y
z
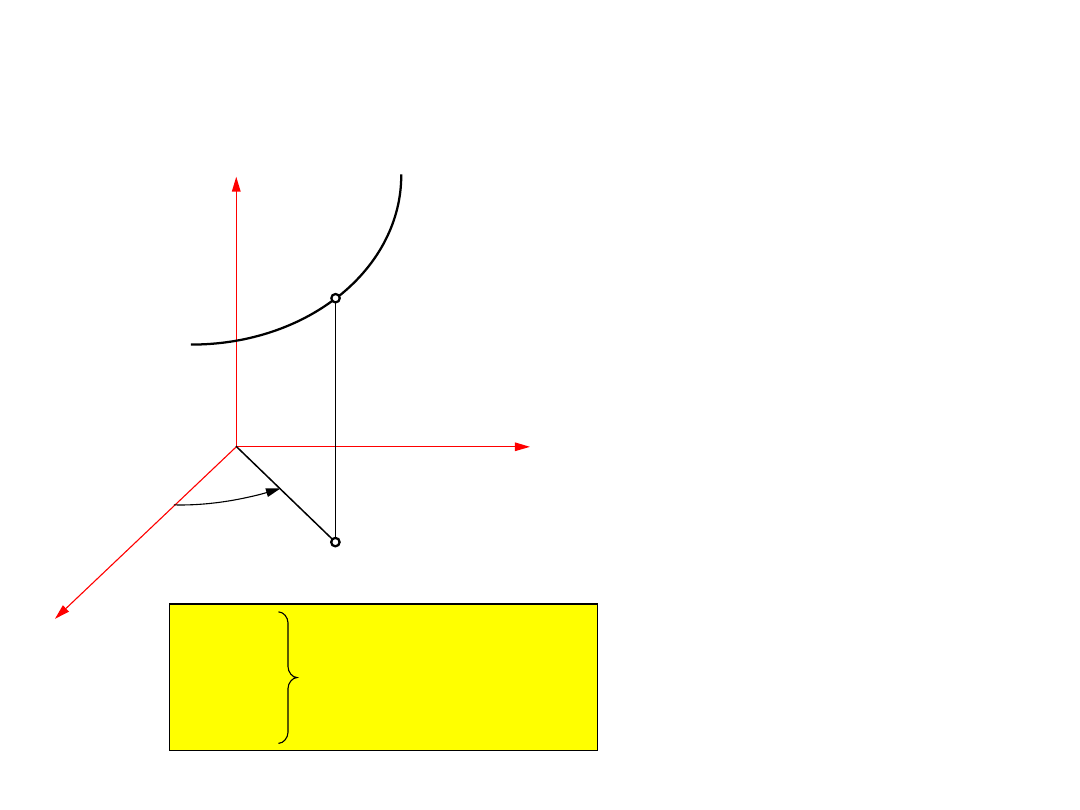
z
A
O
r
( )
r r t
=
- opis skalarny ruchu
we współrzędnych
walcowych
φ
( )
φ φ t
=
( )
z z t
=
A'
r
φ
z
- odległość rzutu punktu
A
na płaszczyznę
Oxy
od
początku
układu współrzędnych
- miara kąta pomiędzy płaszczyzną
Oxz
a płaszczyzną przechodzącą przez
punkty
A
i oś
Oz
- współrzędna
z
w
prostokątnym
układzie współrzędnych
φ
π
� <
0
2
r �0
x rcosφ
=
z z
=
y rsinφ
=
1.3. Równania ruchu we współrzędnych walcowych
9
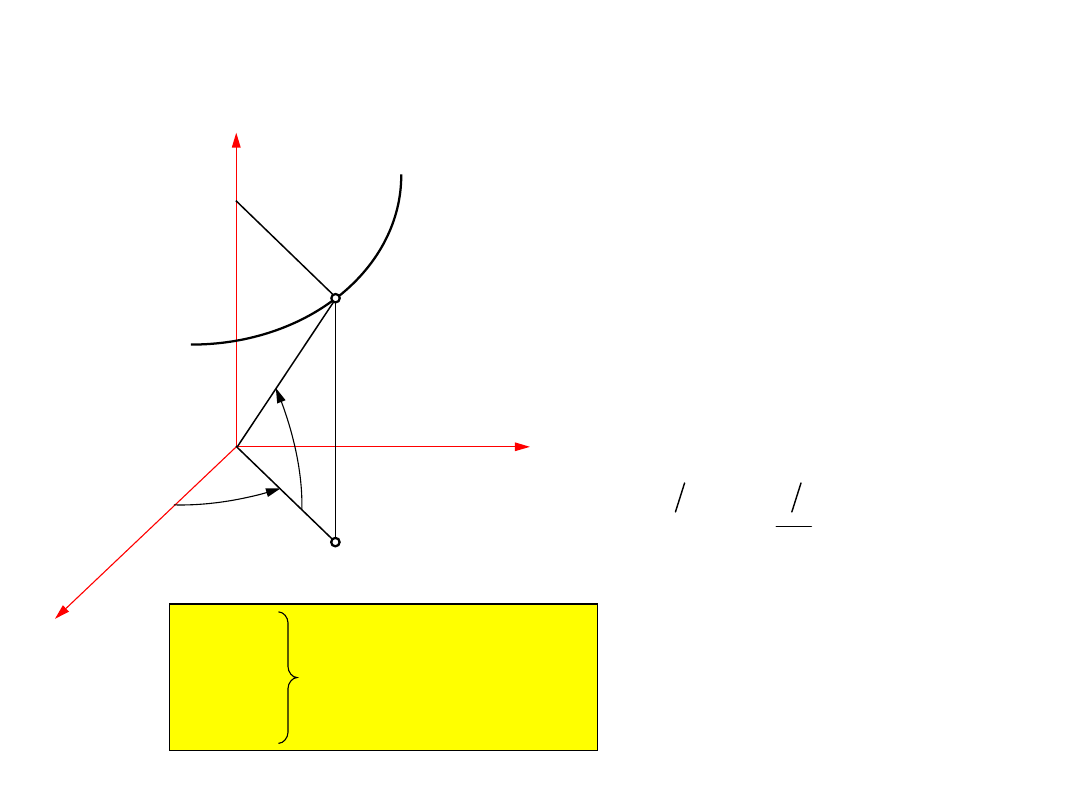
x
y
z
z
A
O
( )
r r t
=
- opis skalarny ruchu
we współrzędnych
sferycznych
φ
( )
φ φ t
=
( )
θ θ t
=
A'
r
φ
θ
- odległość punktu
A
od punktu
O
- miara kąta pomiędzy płaszczyzną
przechodzącą przez punkt
A
i oś
Oz
a płaszczyzną
Oxz
- miara kąta pomiędzy
płaszczyzną
Oxy
a promieniem
r
θ
r
φ
π
� <
0
2
r �0
π
θ π
-
� �
2
2
z
θ
gdy OA
Oz
>
��
0
z
A
x rcosφcosθ
=
z rsinθ
=
y rsinφcosθ
=
1.4. Równania ruchu w sferycznym układzie
współrzędnych

Część 2
Prędkość i przyspieszenie punktu
11
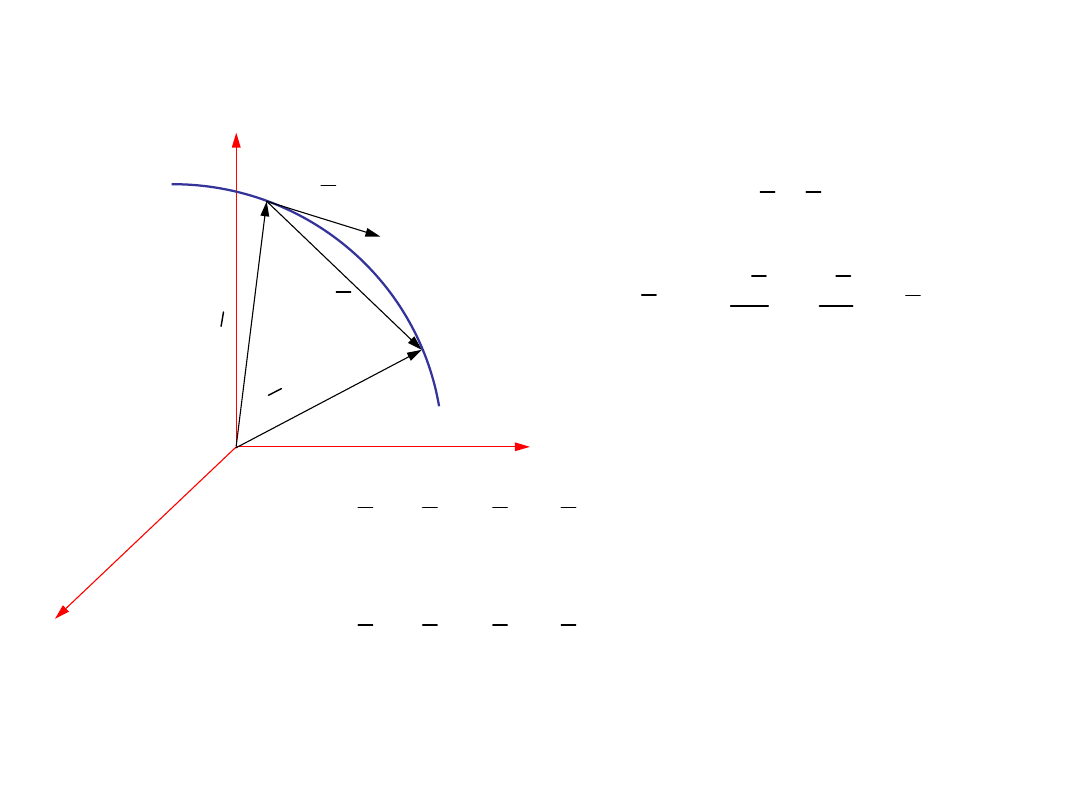
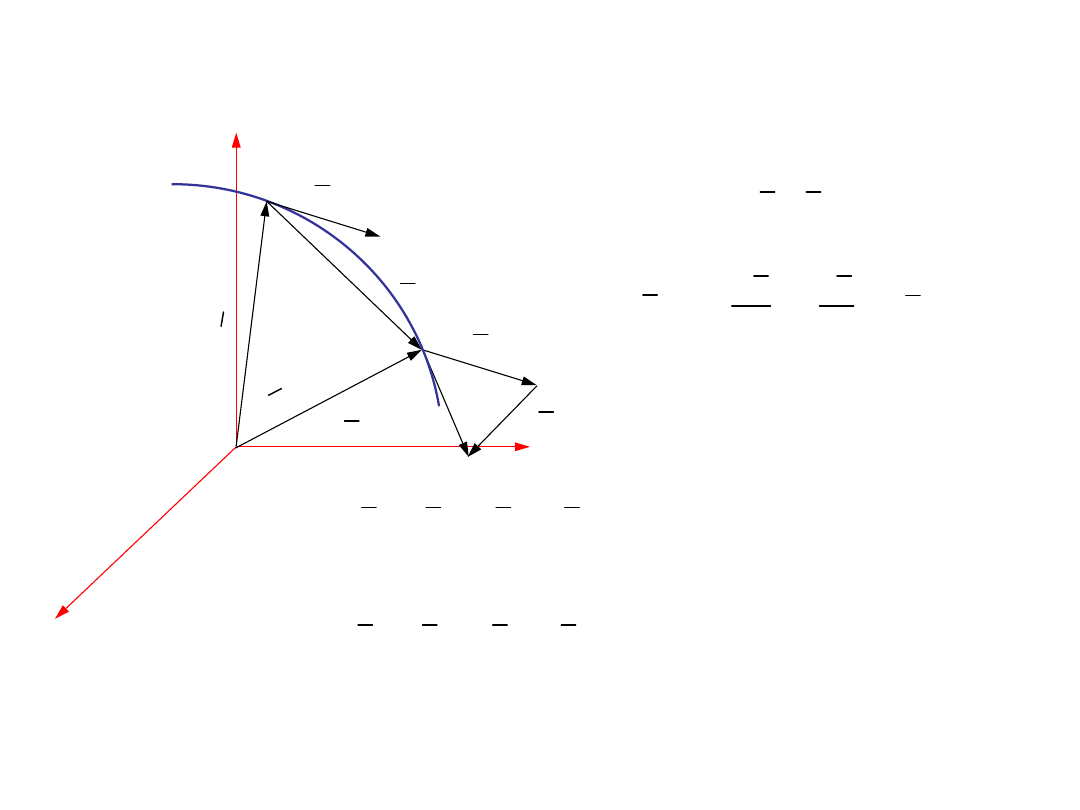
2.1. Prędkość punktu w opisie wektorowym i
skalarnym
x
y
z
O
t
A
tΔt
A
+
Δr
x
y
z
r xe
ye
ze
=
+
+
df
Δt
Δr
υ lim
Δt
�
=
0
dr
dt
=
( )
x f t
=
1
( )
y f t
=
2
( )
z f t
=
3
r
= &
Jeśli
to
- prędkość punktu w opisie
wektorowym
x
y
z
υ
x υ
y υ
z
=
=
=
&
&
&
x
y
z
υ xe
ye
ze
=
+
+
&
&
&
gdzie
- składowe prędkości
w prostokątnym
układzie
współrzędnych
( )
v t
r t
Δt
r
t
( )
r r t
=
Dany jest wektorowy opis
ruchu:
12
2.2. Przyspieszenie punktu w opisie wektorowym i
skalarnym
x
y
z
O
(
)
v tΔt
+
Δr
x
y
z
r xe
ye
ze
=
+
+
df
Δt
Δυ
a lim
Δt
�
=
0
dυ
dt
=
( )
x f t
=
1
( )
y f t
=
2
( )
z f t
=
3
r
=&&
Jeśli
to
- przyspieszenie punktu w
opisie
wektorowym
x
y
z
a
x a
y a
z
=
=
=
&&
&&
&&
x
y
z
a xe
ye
ze
=
+
+
&&
&&
&&
gdzie
- składowe
przyspieszenia
w prostokątnym
układzie
współrzędnych
( )
v t
r t
Δt
r
t
Δv
( )
v t
( )
r r t
=
Dany jest wektorowy opis
ruchu:
13
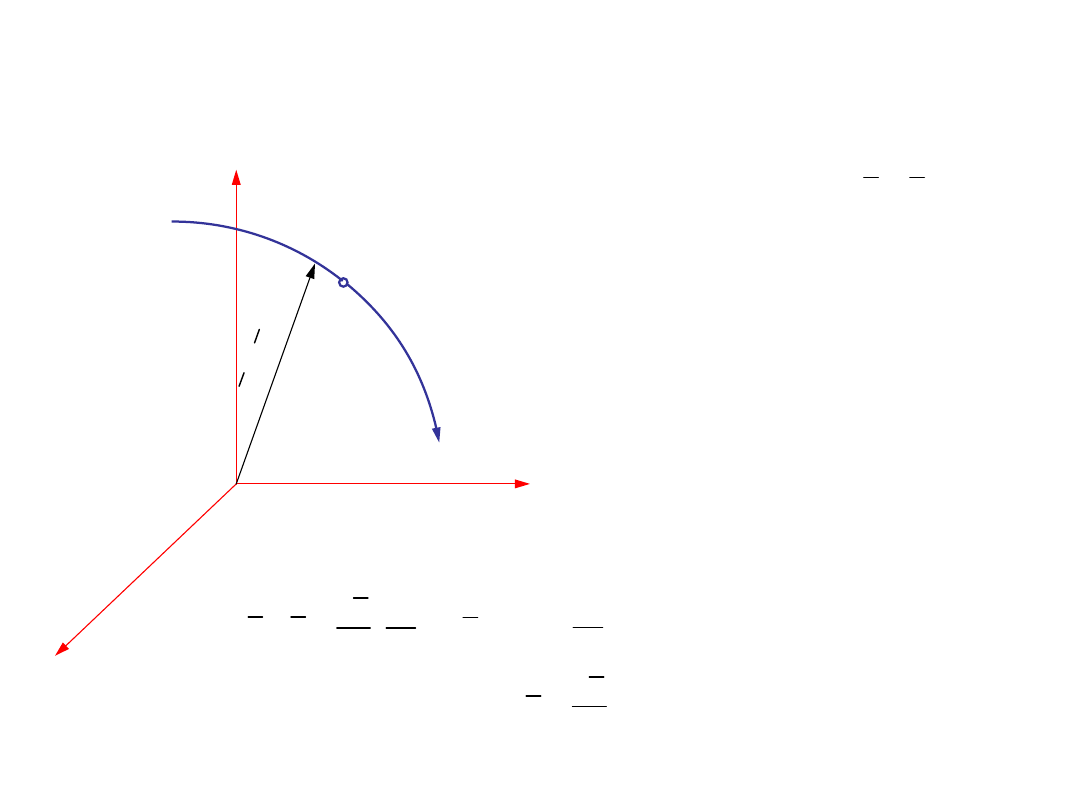
2.3. Prędkość i przyspieszenie punktu w opisie
naturalnym
x
y
z
O
3. Punkt początkowy toru
s <0
( )
s s t
=
r
r
s
Ω
0
s
s <0
Naturalny opis ruchu:
4. Równanie ruchu
2. Orientacja toru
Ω
0
( )
r r s
=
1. Równanie toru
dr
τ
ds
=
dr ds
υ r
sτ
ds dt
= =
� =
&
&
- wektor kierunku
stycznego do toru
ds
s
dt
=
&
- prędkość skalarna
Prędkość punktu w opisie naturalnym
14
( )
r t
(
)
r tΔt
+
Δr
Δs
Ω
0
τ
Δr
s
Δs <0
O
( )
r t
(
)
r tΔt
+
Δr
Δs
Ω
0
τ
Δr
s
Δs >0
O
υ
υ
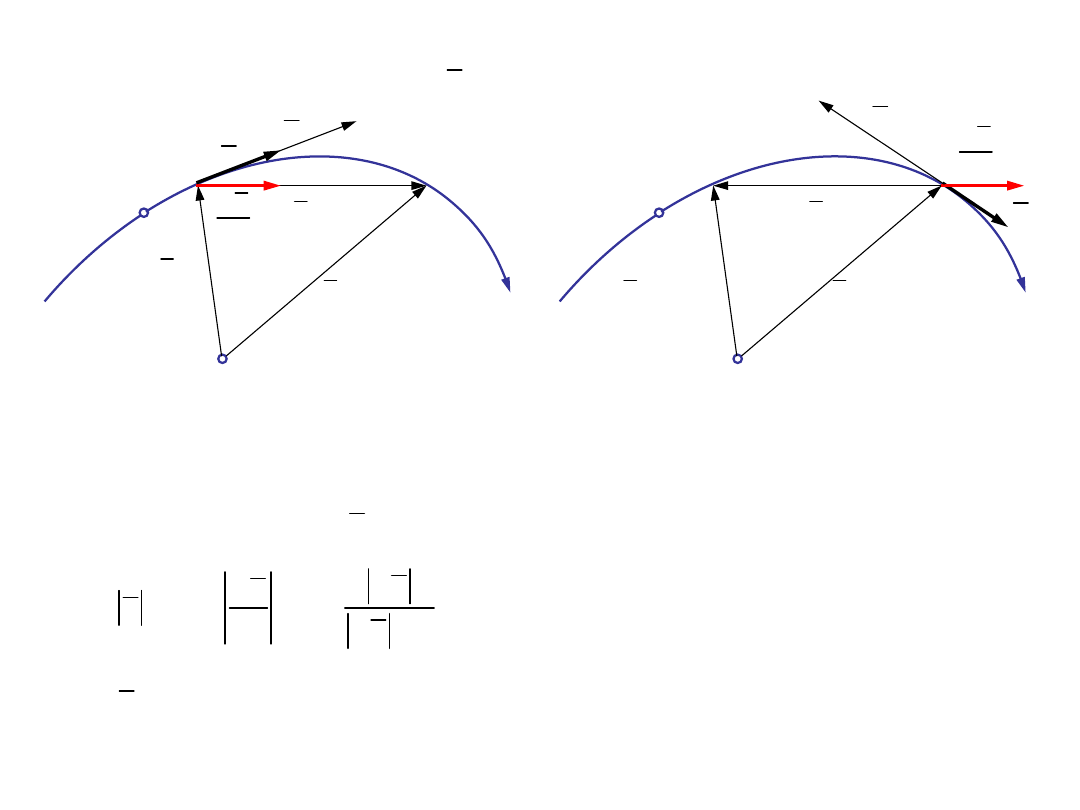
Zwrot wektora kierunku stycznego do
toru jest zawsze zgodny z orientacją toru
t
A
tΔt
A
+
t
A
tΔt
A
+
Wartość wektora
τ
Δs
ξ
Δr
Δr
τ
lim
lim
Δs
Δr ξ
�
�
=
=
=
+
0
0
1
Ustalenie zwrotu wektora
τ
τ
jest wersorem kierunku stycznego do toru
15
τ τ
^&
( )
d
aυ
sτ
sτ sτ
dt
= =
=
+
&
&
&
&& &
n
dτ
dτ ds
dτ dα
dτ
a
s
s
s
sκ
s κν
dt
ds dt
dα ds
dα
=
=
� =
� =
=
2
2
2
&
&
&
&
&
- przyspieszenie normalne do toru
Przyspieszenie punktu w opisie
naturalnym
d
τ
τ
τ τ
dt
=
=
=
2
2
1
2
0
&
s
sτ a
=
&&
- przyspieszenie styczne do toru
n
sτ a
=
&
&
s
n
a a a
= +
df
dα
κ
ds
=
- krzywizna krzywej (zakłada się, że
przyrosty
drogi i kąta są tego samego znaku)
ds
ρ
dα κ
=
=
1
- promień krzywizny
ν
- wektor współliniowy z a więc normalny do toru
τ&
16
(
)
s
υ
a
aτ τ
a
υ
υ
�
�
= �
= �
�
�
�
�
2
(
)
d
d
υ
υ υ
υ υ
a υ
dt
dt
=
� = �� = ��
2
2
2
&
s
d
aυ υ
dt
υ
�
�
=�
�
�
�
2
2
1
2
n
s
d
a
a a
aυ υ
dt
υ
�
�
= -
= - �
�
�
�
2
2
1
2
(
) (
)
(
)
n
s
υ
a
a a
a
aυ
a υ υ
a υ υ
υ a υ
υ
υ
υ
�
�
= -
= -
�
=
� � -
� � =
� �
�
�
�
�
�
�
�
�
2
2
2
1
1
Przyspieszenie normalne można wyznaczyć z zależności
Przyspieszenie styczne do toru jest rzutem przyspieszenia całkowitego na
kierunek styczny
17
Własności
wektora
ν
( )
r t
(
)
r tΔt
+
Δα
Δτ
sin
=2
2
Ω
0
tΔt
τ
+
s
O
Δτ
t
A
tΔt
A
+
t
τ
Δα
Δα 2
Δα 2
t
τ
tΔt
τ
+
r =1
Δα
Δα
Δα
sin
Δτ
ν
lim
lim
Δα
Δα
�
�
=
=
=
0
0
2
2
1
Wektor jest wersorem
ν
18
( )
r t
(
)
r tΔt
+
Ω
0
s
O
t
A
tΔt
A
+
t
τ
Δα
tΔt
τ
+
Δτ
Δs <0
Δs <0
Δτ
skierowany w obszar
po stronie wklęsłej toru
Δτ
Δs
skierowany w obszar
po stronie wypukłej
toru
( )
r t
(
)
r tΔt
+
Ω
0
tΔt
τ
+
s
O
t
A
tΔt
A
+
t
τ
Δα
tΔt
τ
+
Δτ
Δs >0
Δs >0
Δτ
skierowany w obszar
po stronie wklęsłej toru
Δτ
Δs
skierowany w obszar
po stronie wklęsłej toru
tΔt
τ
+
jest skierowany do środka
krzywizny
dτ
dτ dα
κν
ν
ds dα ds
=
� =
��
ν
19
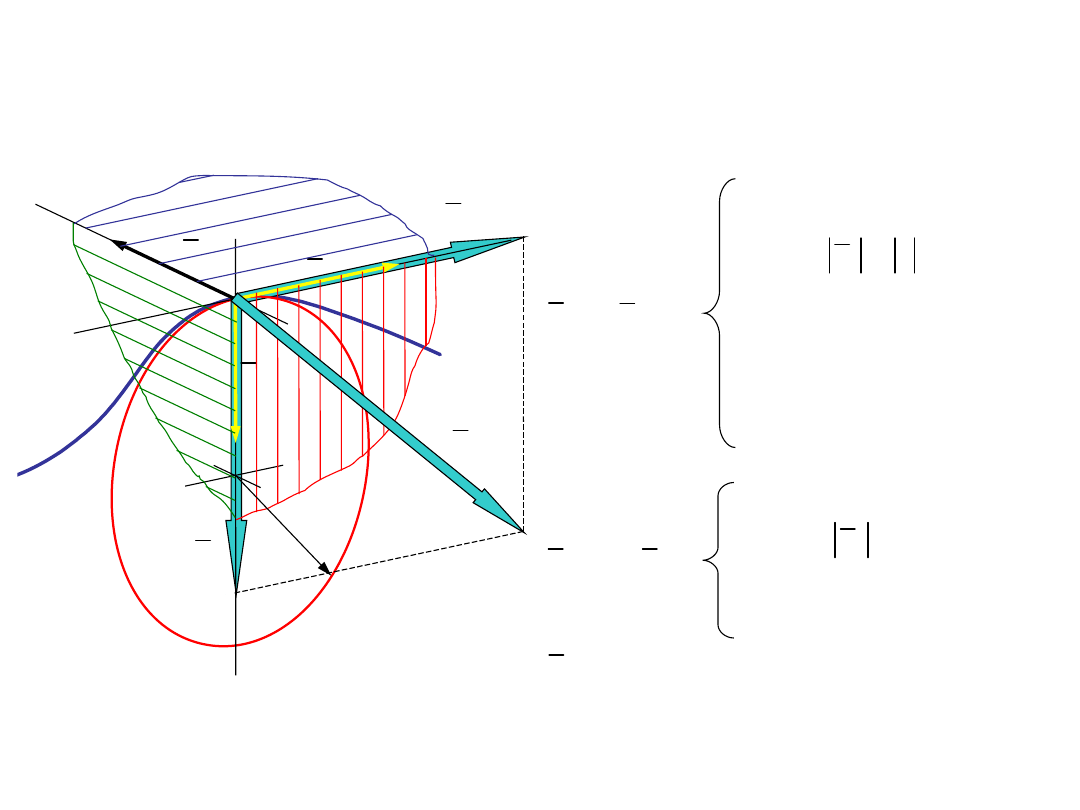
2.4. Trójścian Freneta
τ
ν
b
styczn
a
n
o
rm
a
ln
a
g
łó
w
n
a
bino
rmaln
a
płaszczyzna
ściśle styczna
płaszczyzn
a
normalna
okrąg
ściśle styczny
płaszczyzna
prostująca
ρ
τ
ν
b
- wersor binormalny
- wersor styczny
- wersor normalny
bτ ν
= �
20
Przyspieszenie w lokalnej bazie
Freneta
τ
ν
b
ρ
przeciwny do orientacji
toru
gdy
kierunek styczny
do toru
moduł
s
a
n
a
a
0
b
a =
s
a
sτ
=
�
&&
s
a
s
= &&
0
s <
&&
zwrot zależny od znaku
zgodny z orientacją toru
gdy
0
s >
&&
s&&
kierunek normalnej
głównej
moduł
zwrot zawsze do środka
krzywizny toru
2
2
n
a
sκ υ κ
=
=
&
Wektor przyspieszenia leży
w płaszczyźnie ściśle
stycznej
2
n
a
sκν
=
�
&

Część 3
Ruch po okręgu
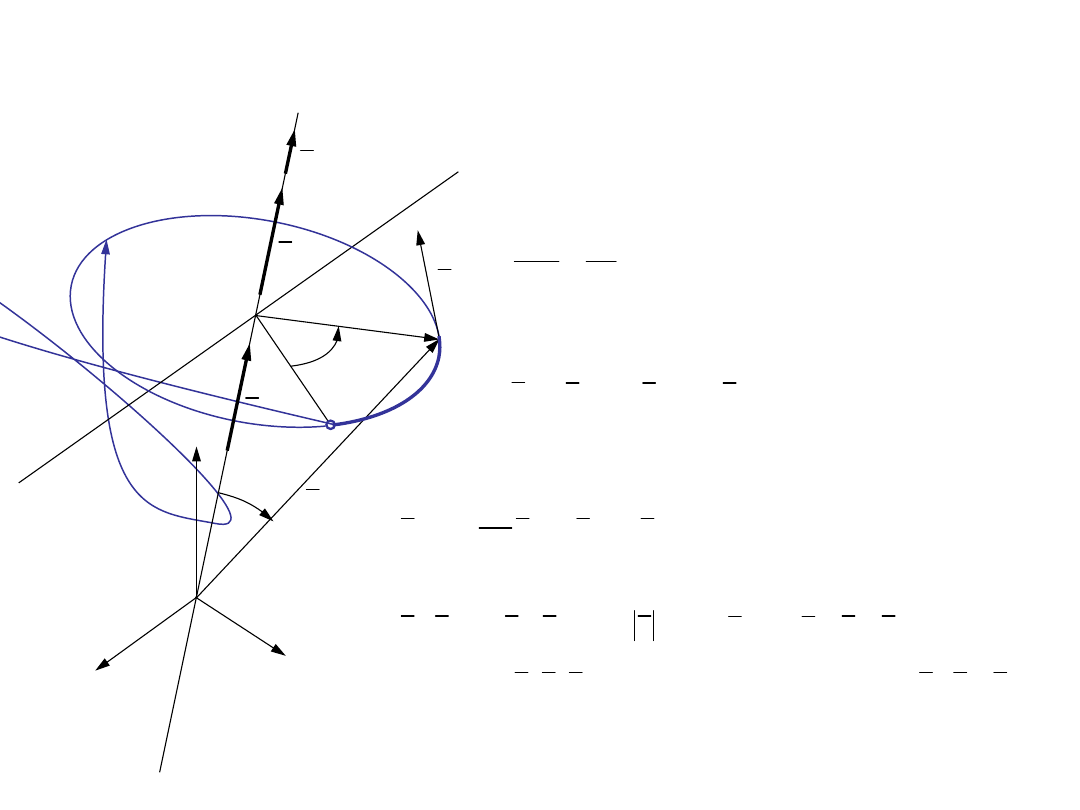
22
A
Ω
0
r
υ
R
φ
α
s
x
y
z
l
e
ε
O
ś
o
b
ro
tu
O
2
2
sφ
s Rφ
πR
π
=
�
=
υ sτ Rφτ Rωτ
=
=
=
&
&
df
ω φ
=&
- skalarna prędkość kątowa
0
df
l
l
l
Δt
Δφ
ω lim
e φe ωe
Δt
�
=
=
=
&
- wektor prędkości kątowej
3.1. Prędkość w ruchu po okręgu
gdzie
- zależność pomiędzy
drogą s a drogą kątową
φ
Punkt porusza się po okręgu o promieniu
R
i środku w punkcie O
Prędkość w ruchu po okręgu
1
l
ω r ω e r ω
r sinα τ Rωτ υ r
===����=״=�
&
ω, r, υ
Wektory związane są
zależnością
ω r υ
� =
ω
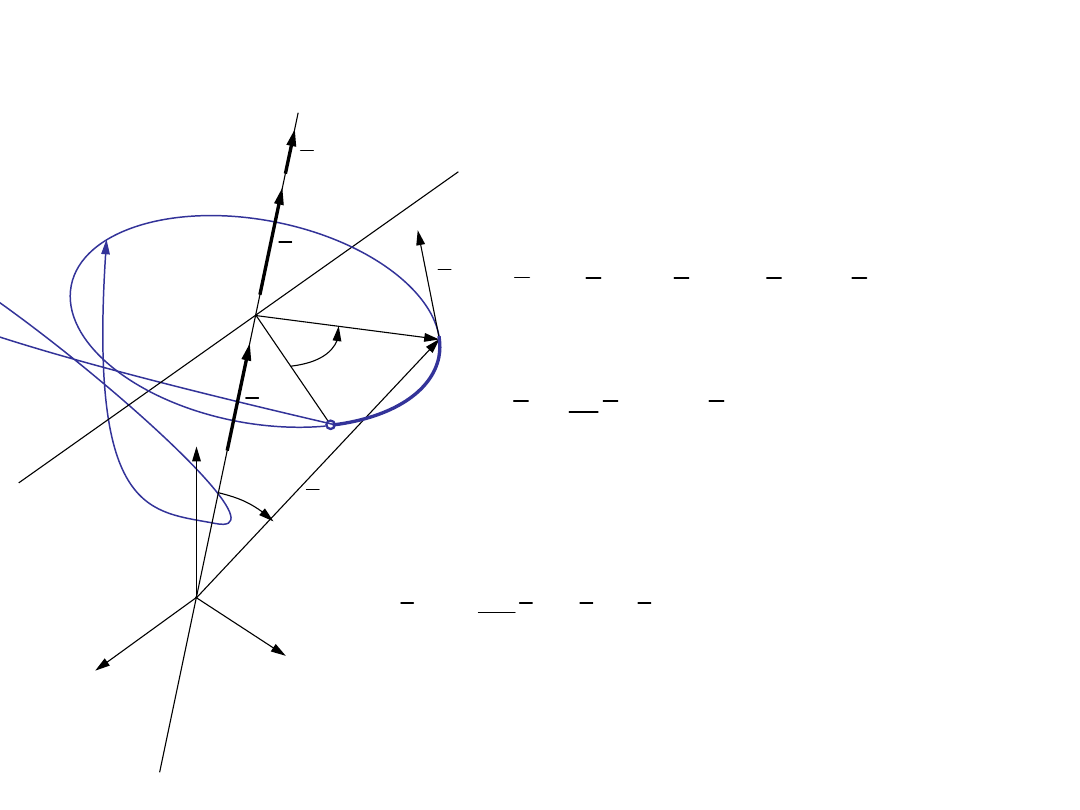
23
A
Ω
0
r
υ
R
φ
α
s
x
y
z
l
e
ω
O
ś
o
b
ro
tu
O
0
df
l
l
l
Δt
Δω
ε lim
e φe
εe
Δt
�
=
=
=
&&
- wektor przyspieszenia
kątowego
3.2. Przyspieszenie w ruchu po okręgu (opis
naturalny)
Przyspieszenie normalne do toru
s
a
sτ Rφτ Rωτ Rετ
=
=
=
=
&&
&&
&
Przyspieszenie styczne do toru
2
2
n
s
aν Rω ν
R
=
=
&
df
ε φ
=&&
- skalarne przyspieszenie kątowe
gdzie
ε
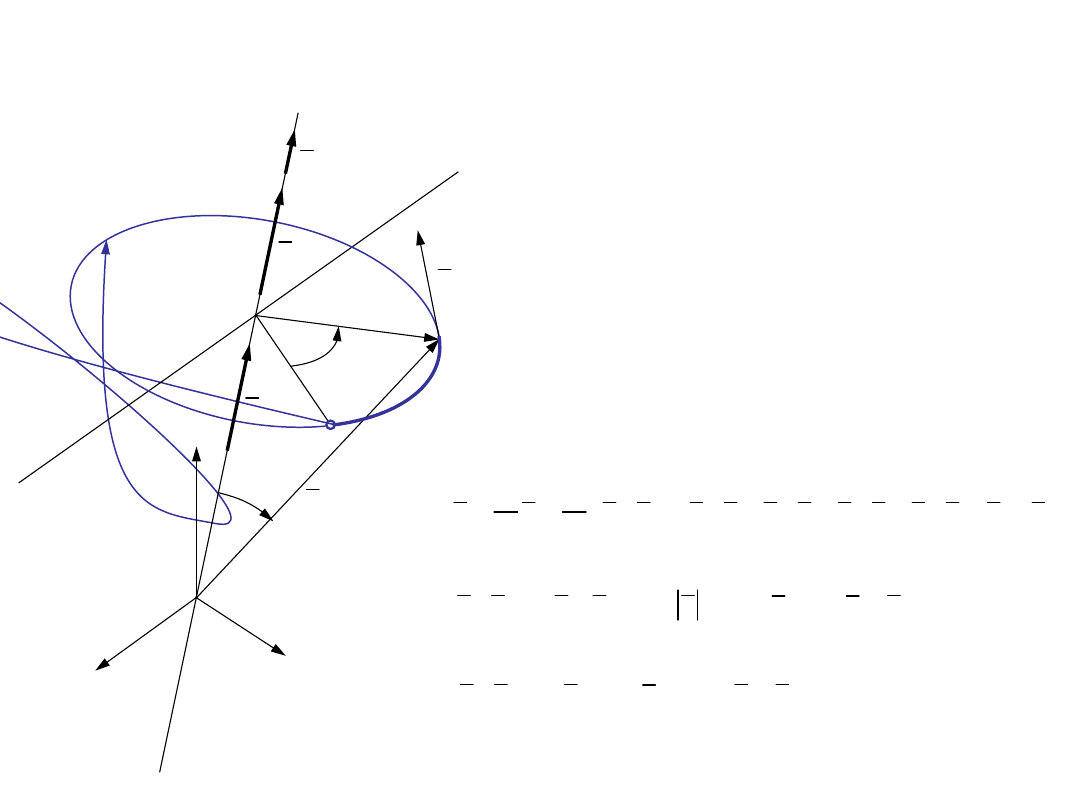
24
(
)
s
n
d
d
aυ
ω r
ω r ω r ε r ω υ a
a
dt
dt
=
=
� = � + � = � + � = +
&
&
1
l
s
ε r ε e r ε
r sinα τ Rετ a
==����=״=�
2
l
n
ω υ ω e Rωτ Rω ν a
==״=�
A
Ω
0
r
υ
R
φ
α
s
x
y
z
l
e
ω
O
ś
o
b
ro
tu
O
ε
3.3. Przyspieszenie w ruchu po okręgu (opis
wektorowy)
Document Outline
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Slide 22
- Slide 23
- Slide 24
Wyszukiwarka
Podobne podstrony:
MT st w 06 [tryb zgodności]
MT st w 06 [tryb zgodności]
MT st w 02a
MT I Wyklad 06
mechanika egzamin MT-2011-06-20-termin1
MT st w 08 [tryb zgodności]
MT st w 02a 2
MT st w 10
MT st w 13
MT st w 03
MT st w 04 cz1 [tryb zgodności]
MT st w 05 [tryb zgodności]
MT st w 15
MT st w 03
MT st w 04 cz2 [tryb zgodności]
więcej podobnych podstron