Wyk
ł
ad 5
MECHANIKA TEORETYCZNA
Studia stacjonarne I stopnia – rok akademicki 2013/14
1
Wyk
ł
ad 5
Autor:
Henryk Laskowski
Katedra Podstaw Mechaniki Ośrodków Ciąg
ł
ych
Instytut Mechaniki Budowli
Wydzia
ł
Inżynierii Lądowej
RODZAJE OBCIĄŻEŃ
REDUKCJA – PODSUMOWANIE DZIA
Ł
U

Część 1
RODZAJE OBCIĄŻEŃ
2.1. Klasyfikacja si
ł
def: działa na ka
ż
dy element obj
ę
to
ś
ci (masy)
ciała.
Przykłady:
- siły grawitacji
- siły bezwładno
ś
ci
def: działa tylko na jeden punkt ciała;
zast
ę
puje siły rozło
ż
one.
Warto
ść
siły skupionej oraz jej miejsce
przyło
ż
enia musz
ą
by
ć
takie, aby efekt działania
siły skupionej był identyczny z działaniem siły
SIŁA
POWIERZCHNIOWA
MASOWA
SKUPIONA
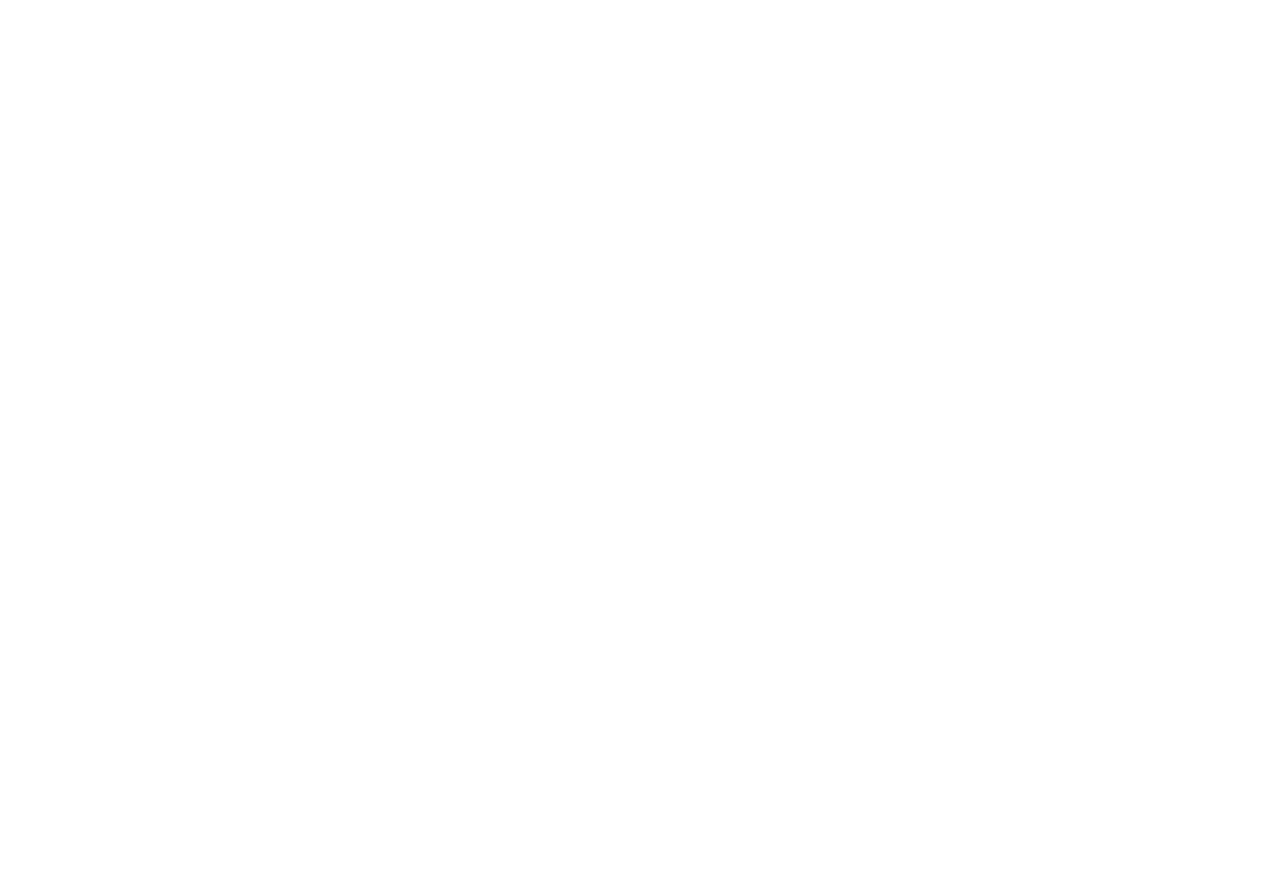
def.: dzia
ł
a na każdy element powierzchni cia
ł
a.
Przyk
ł
ady
- dzia
ł
anie gruntu na p
ł
ytę fundamentową
- dzia
ł
anie śniegu na dach
- dzia
ł
anie wiatru na powierzchnię budynku
3
siły skupionej był identyczny z działaniem siły
rozło
ż
onej na powierzchni lub w obj
ę
to
ś
ci

4
2.2. Obciążenia w uproszczonych modelach ustrojów budowlanych
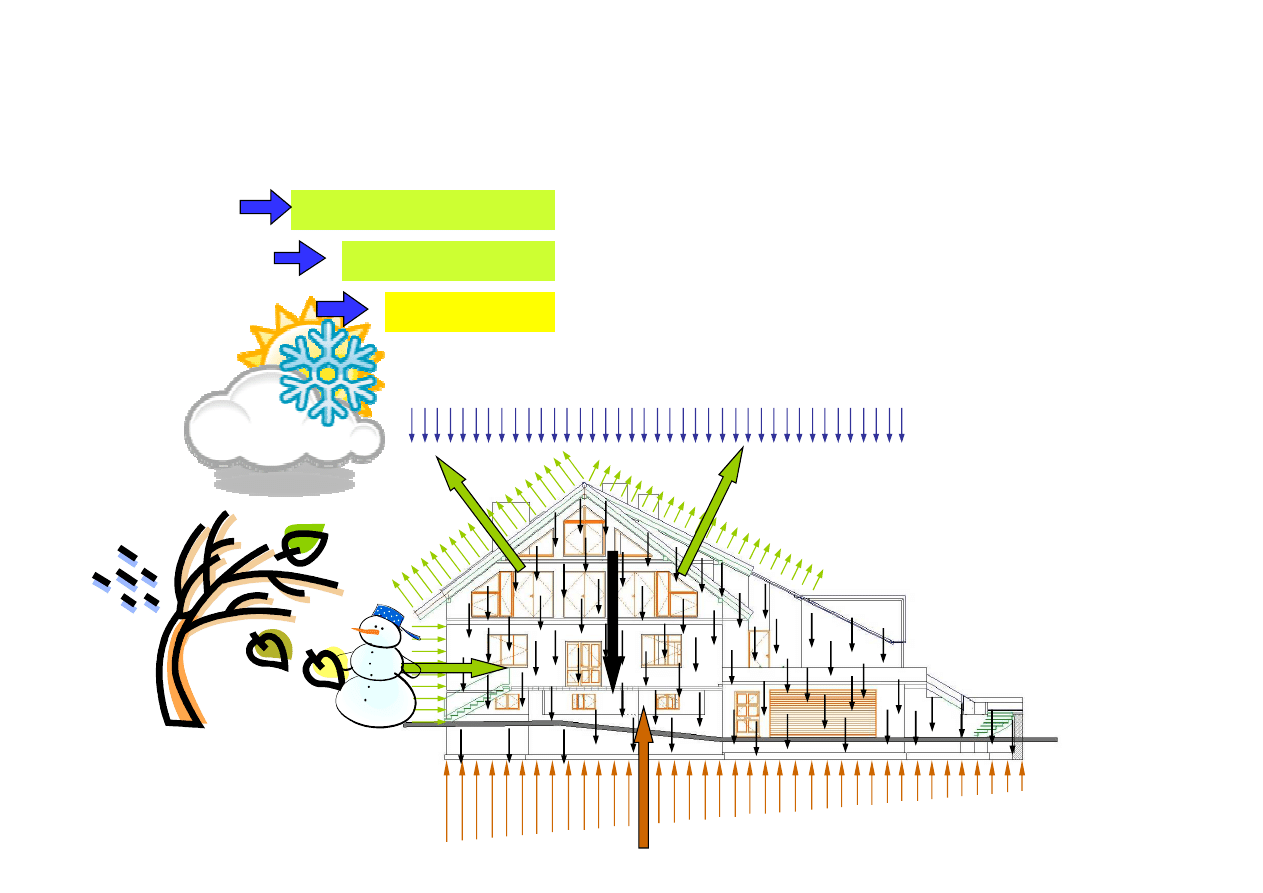
Pręt
Pod
ł
użny element ustroju
budowlanego, w którym jeden
wymiar (d
ł
ugość) jest znacznie
większy od dwóch pozosta
ł
ych
(szerokość i wysokość)
Oś pręta
Linia, na której leżą środki
Pręt
Oś pręta
a) Model pręta wraz z uk
ł
adem obciążeń
5
Linia, na której leżą środki
geometryczne wszystkich
przekrojów pręta
Ze względu na zaniechanie wymiarów przekroju poprzecznego pręta
punktom osi przypisuje się charakterystyki geometryczne przekroju
Model pręta
W mechanice modelem pręta jest
linia pokrywająca się z osią pręta
Model pręta
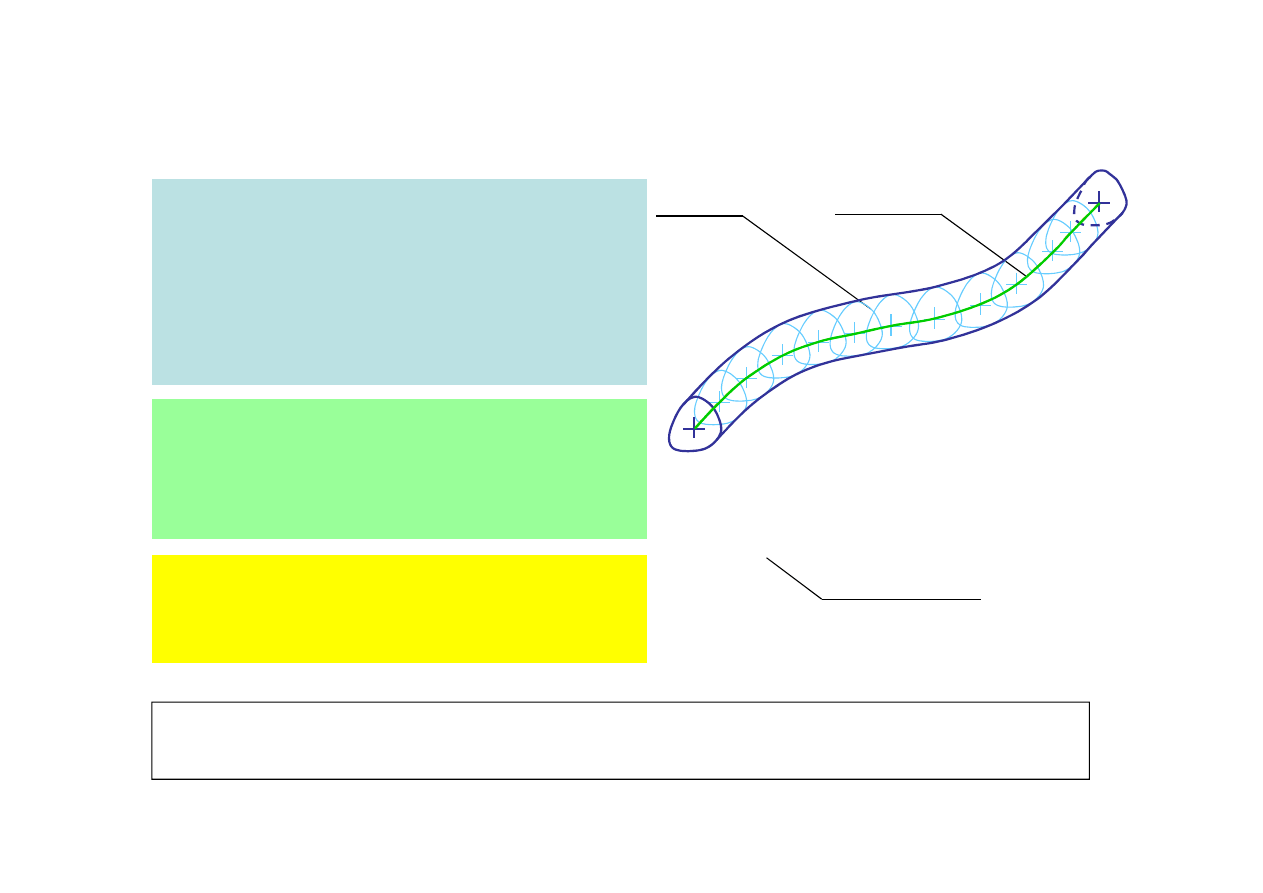
Za
ł
ożenia odnośnie obciążeń
przy
ł
ożonych do pręta
1. Kierunki dzia
ł
ania si
ł
skupionych
przecinają się z osią pręta.
6
2. Si
ł
y powierzchniowe i masowe
przy
ł
ożone do pręta zamienia się
na obciążenia liniowe dzia
ł
ające
wzd
ł
uż tworzących powierzchni
walcowej zawierającą oś pręta
3. W modelu pręta si
ł
y skupione
i liniowe są przy
ł
ożone do jego osi
Obciążenia w modelu pręta
Tarcza
P
ł
aski element ustroju
budowlanego, w którym dwa
wymiary są znacznie większe od
trzeciego a kierunki dzia
ł
ania
wszystkich obciążeń są równoleg
ł
e
do p
ł
aszczyzny tarczy
Tarcza
b) Model tarczy wraz z uk
ł
adem obciążeń
7
Model tarczy
W mechanice modelem tarczy jest
p
ł
aszczyzna w po
ł
owie grubości
tarczy. Przyjmuje się, że w tej
p
ł
aszczyźnie zawierają się kierunki
dzia
ł
ania wszystkich obciążeń
Model tarczy
Obciążenie
w płaszczyźnie tarczy
Obciążenia masowe tarczy zamie-
nia się na obciążenia powierzchnio-
we dzia
ł
ające w p
ł
aszczyźnie tarczy
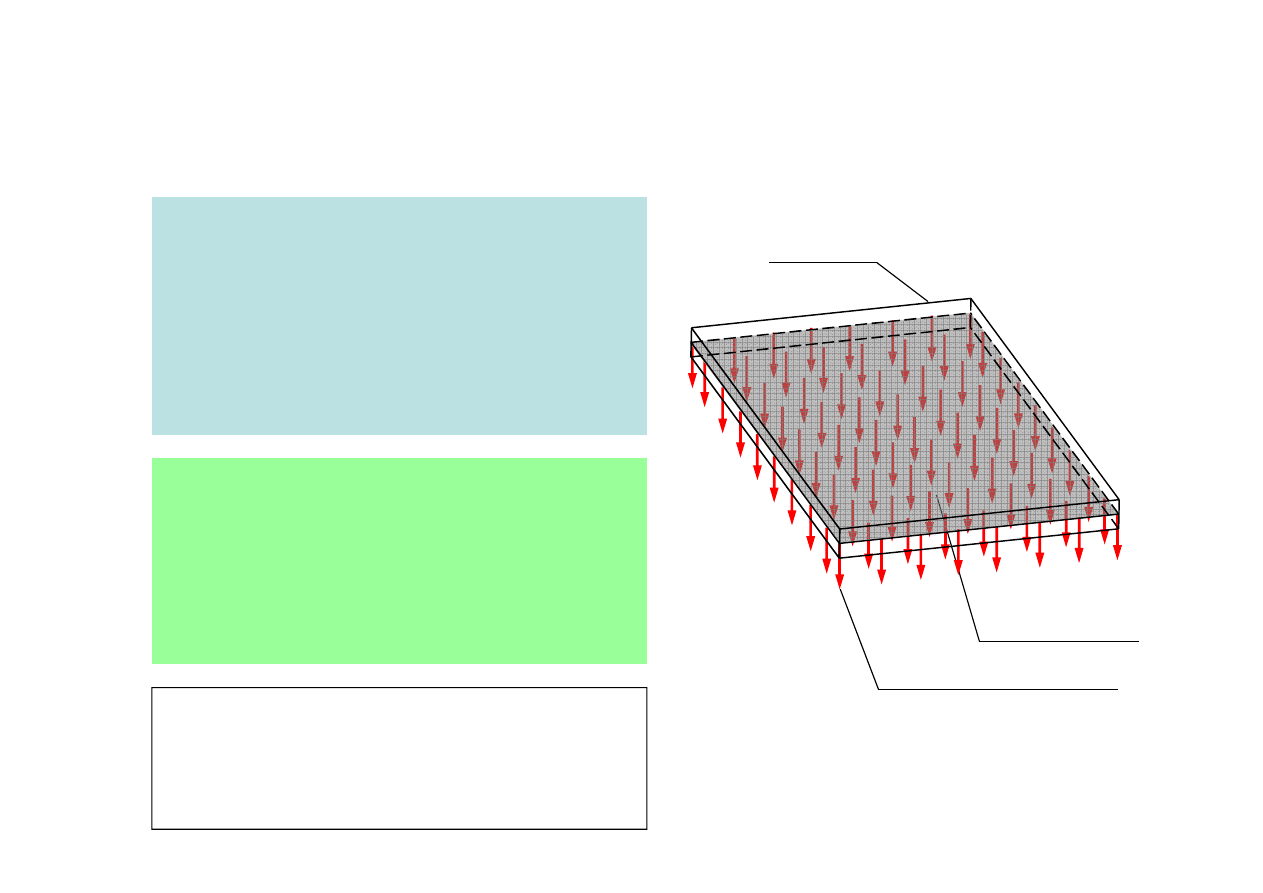
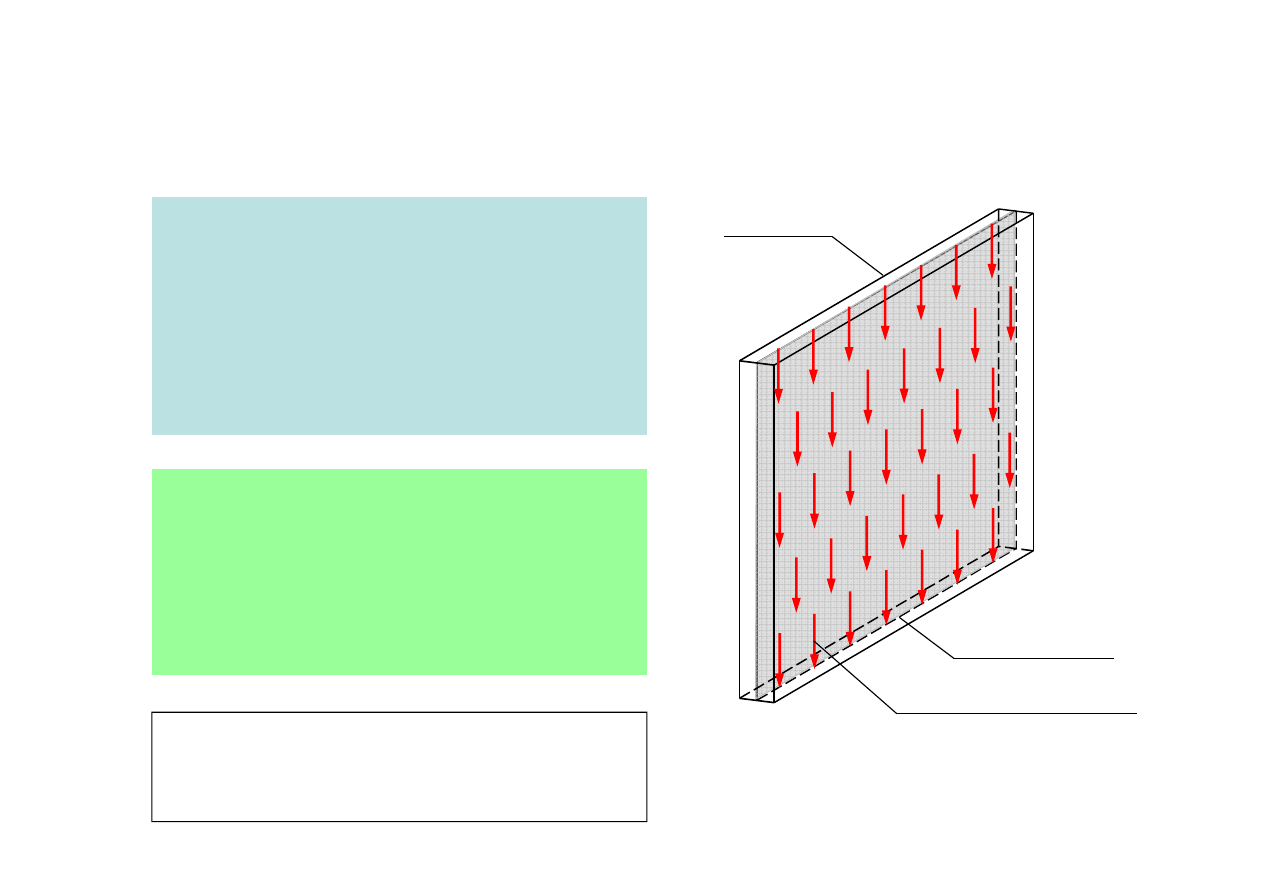
P
ł
yta
P
ł
aski element ustroju
budowlanego, w którym dwa
wymiary są znacznie większe od
trzeciego a kierunki dzia
ł
ania
wszystkich obciążeń są prostopad
ł
e
do p
ł
aszczyzny p
ł
yty
c) Model p
ł
yty wraz z uk
ł
adem obciążeń
Płyta
8
Model p
ł
yty
W mechanice modelem p
ł
yty jest
p
ł
aszczyzna w po
ł
owie grubości
p
ł
yty. Przyjmuje się, że kierunki
dzia
ł
ania wszystkich obciążeń są
prostopad
ł
e do tej p
ł
aszczyzny
Model płyty
Obciążenie
w płaszczyźnie płyty
Obciążenia masowe p
ł
yty zamienia
się na obciążenia powierzchniowe
dzia
ł
ające w kierunku prostopad
ł
ym
do p
ł
yty
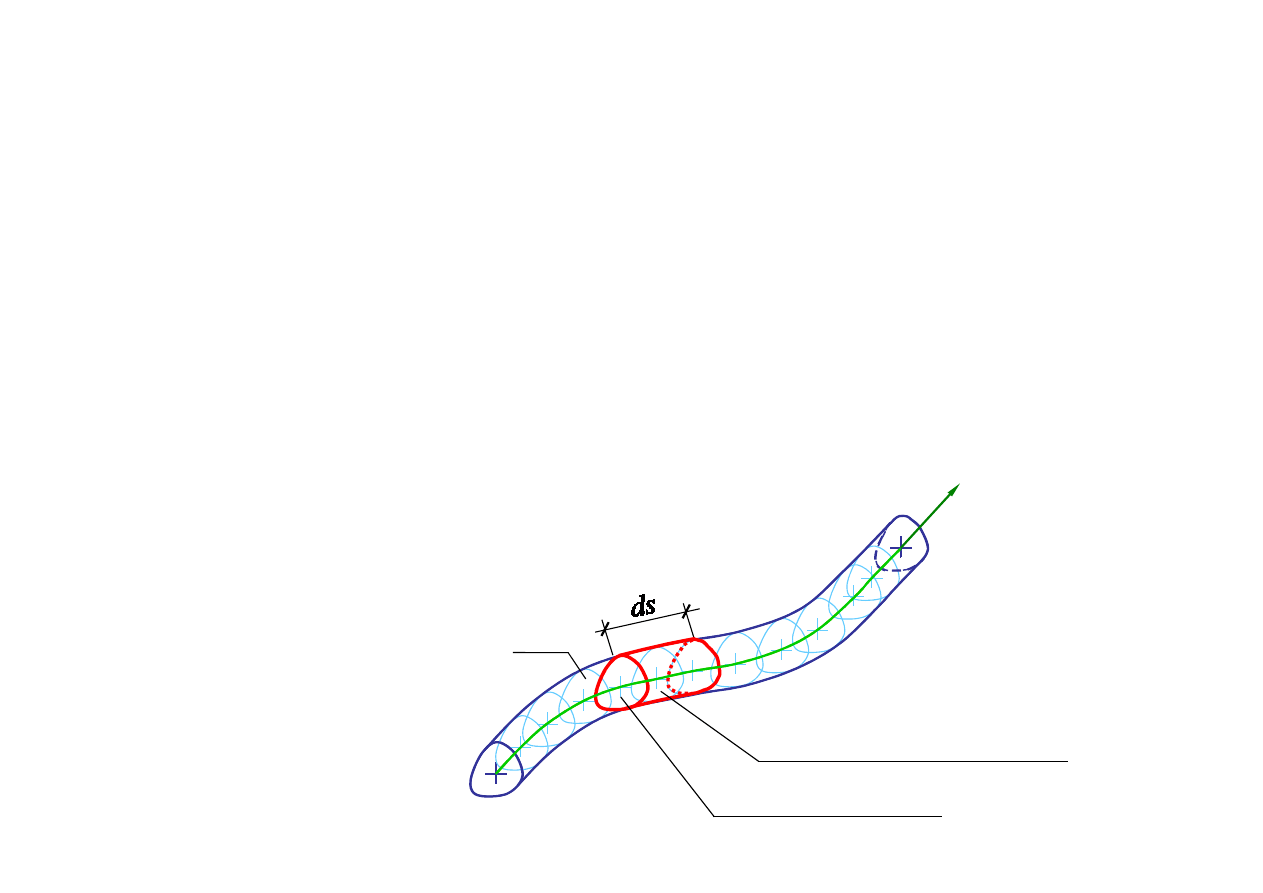
2.3. Obliczanie obciążeń
a) Przeliczenie obciążenia masowego pręta (ciężaru w
ł
asnego)
na równoważne obciążenie liniowe
( )
( )
( ) ( )
( ) ( ) ( )
q s
ds
γ s
dV
γ s
A s
ds
q s
γ s
A s
⋅ =
⋅
=
⋅
⋅
→
=
⋅
( )
γ s
[N/m
3
]
- obciążenie masowe (ciężar w
ł
aściwy)
d s
[m]
- d
ł
ugość elementarnego odcinka pręta
s
[m]
- wspó
ł
rzędna
ł
ukowa
9
( )
q s
[N/m]
- obciążenie roz
ł
ożone wzd
ł
uż osi pręta
( )
A s
[m
2
]
- pole przekroju
d s
[m]
- d
ł
ugość elementarnego odcinka pręta
s
γ
(
s)
elementarny odcinek pręta
Pole przekroju
( )
A s
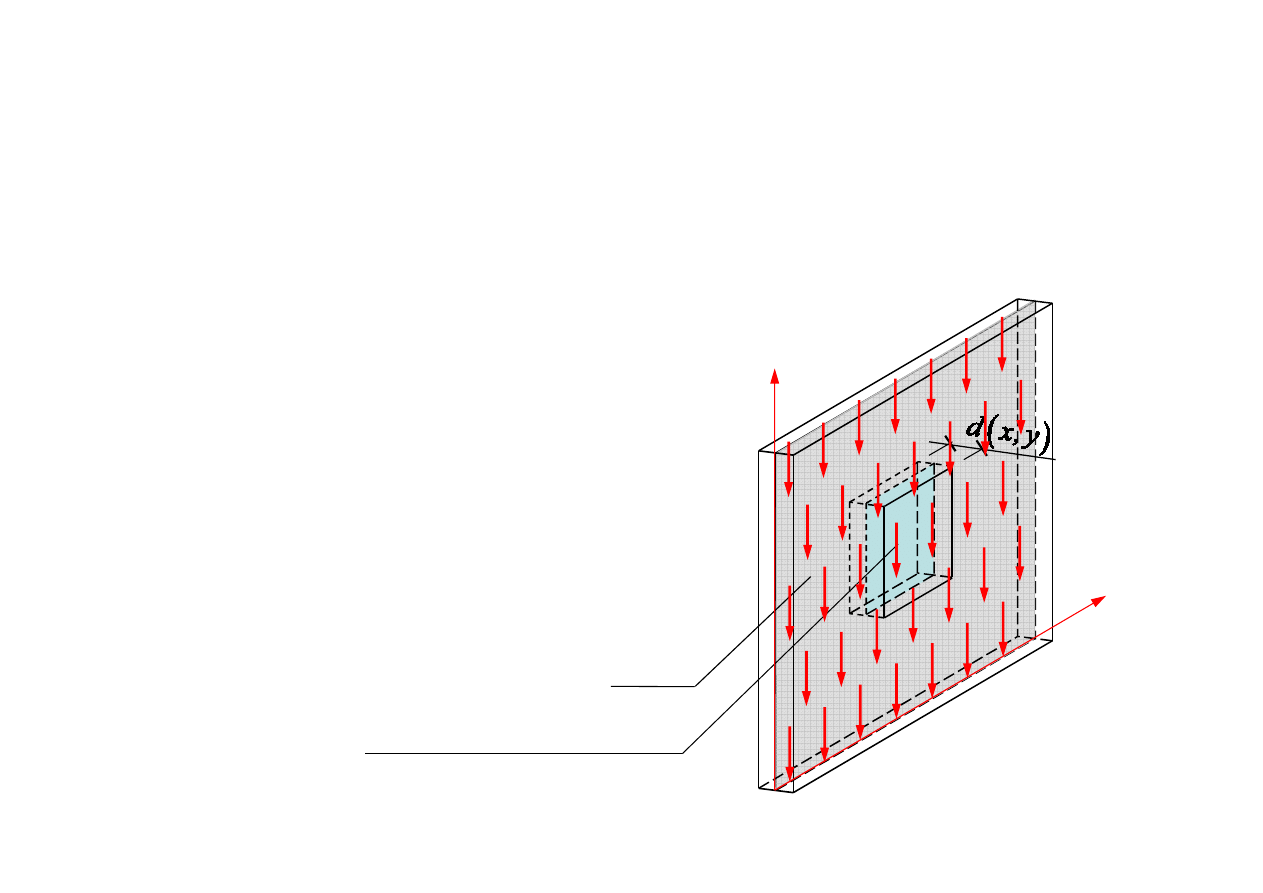
b) Przeliczenie obciążenia masowego tarczy (ciężaru w
ł
asnego)
na równoważne obciążenie powierzchniowe
( )
( )
( ) ( )
( ) ( ) ( )
p x, y
dA
γ x, y
dV
γ x, y
d x, y
dA
p x, y
γ x, y
d x, y
⋅
=
⋅
=
⋅
⋅
→
=
⋅
( )
γ x, y
[N/m
3
]
- obciążenie masowe
(ciężar w
ł
aściwy)
x, y
[m]
- wspó
ł
rzędne
y
10
( )
p x, y
[N/m
2
]
- obciążenie powierzchniowe
( )
d x, y
[m]
- grubość tarczy
dA
[m
2
]
- powierzchnia elementarnego
wycinka tarczy
elementarny wycinek tarczy
γ
(
x, y)
x
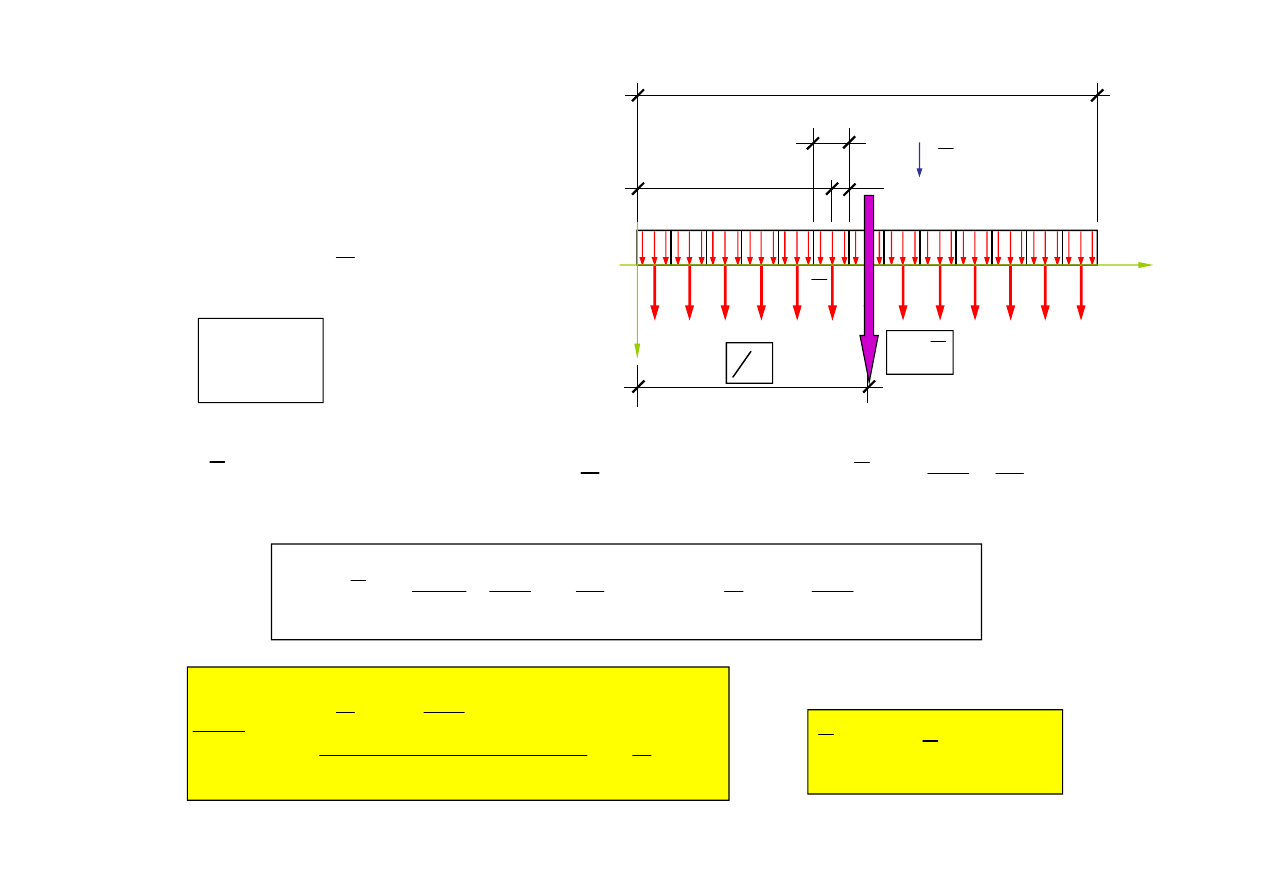
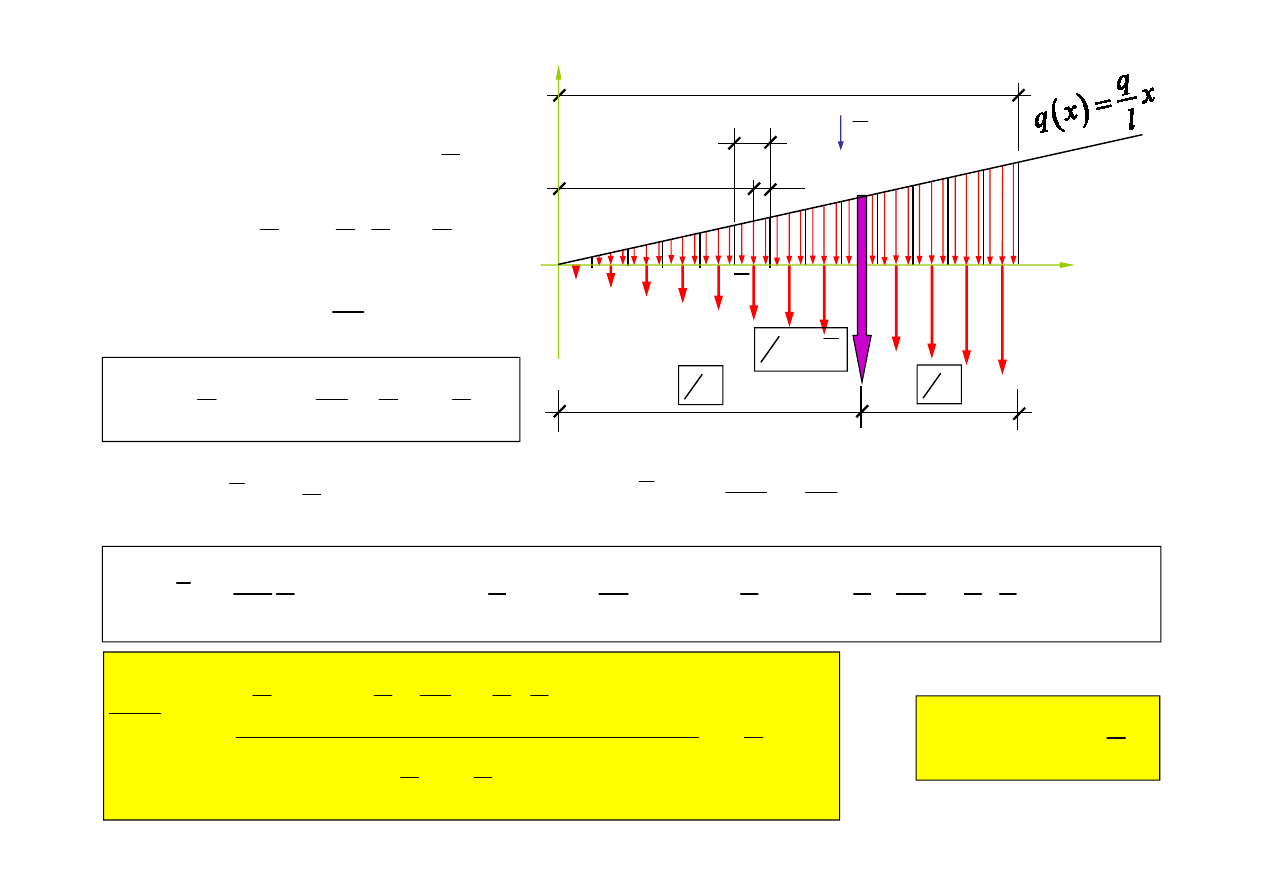
2.3. Redukcja obciążenia ciąg
ł
ego
i
∆x
i
x
l
i
F
(
)
e
=
1 0
x
y
i
i
l
F
q∆x
q
n
=
=
(
) (
)
l
ql
ql
2
n
i
i
F
ql
=
=
∑
1
δ
q
l
1
2
ql e
⋅
a) Obciążenie równomiernie
roz
ł
ożone
11
(
) (
)
i
i
i
l
r
x
i
∆
x
δ
i
δ
n
=
=
−
=
−
0
0
0
i
i
ql
ql
F r
i
δ
n
n
⋅ =
−
2
2
0
n
i
i
i
n
ql
ql
ql
F r
n
n
δ
ql
qlδ
n
n
n
=
+
⋅ =
−
=
+
−
∑
2
2
2
2
1
1
1
0
0
2
2
2
*
n
ql
ql
qlδ
n
OO
lim
l
ql
→∞
+
−
=
=
2
2
1
0
2
2
1
0
2
(
)
n
i
i
F
F e
ql
=
=
=
∑
1
0
i
∆x
i
x
l
i
F
(
)
e
= −
1 0
x
y
( )
i
i
i
F
q x ∆x
=
δ
q
l
2
3
ql e
⋅
1
2
l
1
3
( )
i
i
q
q l
q
q x
x
i
i
l
l n
n
=
=
=
i
ql
F
i
n
=
2
(
)
n
i
i
ql
F
n n
ql
n
n
=
=
+
=
+
∑
2
1
1
1
1
1
1
2
2
i
l
∆x
n
=
b) Obciążenie trójkątne
12
(
)
(
)
n
i
i
i
ql
ql
F r
n
n
n
n n
δ
ql
qlδ
n
n
n
n
n
=
⋅ =
+
+ −
+
=
+ +
−
+
∑
2
3
2
2
3
2
2
1
1
1
1
3
1
1 1
2
3
1
0
2
1
0
6
2
6
2
i
l
r
i
δ
n
=
−
0
i
i
ql
ql
F r
i
i
δ
n
n
⋅ =
−
2
2
3
2
0
*
n
ql
qlδ
n
n
n
OO
lim
l
ql
n
→∞
+ +
−
+
=
=
+
2
2
1
3
1
1 1
2
1
0
6
2
2
0
1
1
3
1
2
n
i
n
i
F
lim
F
ql
→∞ =
=
=
∑
1
1
2

dx
x
l
dF
(
)
e
= −
1 0
x
y
( )
i
F
dF
f x dx
→
=
( )
q
f x
=
c
x
Pe
c
l
x
−
( )
l
n
i
i
F
f x dx
P
=
→
=
∑
∫
1
0
(
)
i
r
r
x
→ =
0
( )
(
)
F r
dF r
f x xdx
⋅ →
⋅ =
0
c) Obciążenie
q = f(x)
P
13
( )
l
n
i
i
i
F r
f x xdx
=
⋅ →
∑
∫
1
0
0
( )
(
)
i
i
F r
dF r
f x xdx
⋅ →
⋅ =
0
( )
l
df
y
f x xdx
S
=
∫
0
( )
(
)
l
y
f x xdx
S
=
∫
0
0
( )
( )
(
)
l
n
i
y
*
i
l
n
i
i
f x xdx
F r
S
OO
P
F
f x dx
=
=
⋅
=
→
=
∫
∑
∑
∫
0
1
1
0
0
0
df
y
C
S
x
P
=
(
)
*
C
OO
x
==
0
Część 2
TEORIA RÓWNOWAŻNOŚCI UK
Ł
ADÓW SI
Ł
podsumowanie dzia
ł
u
podsumowanie dzia
ł
u
Uwaga 1
Dzia
ł
rachunku wektorowego, który opisuje równoważność uk
ł
adów
wektorów jako obiektów matematycznych bez względu na to, jakie
fizyczne wielkości wektorowe są przez nie reprezentowane.
3.1. Teoria równoważności uk
ł
adów wektorów – uwagi
Uwaga 2
Teoria równoważności uk
ł
adów wektorów znajduje zastosowanie tylko
w tych zagadnieniach fizyki, w których dwa równoważne, zgodnie z tą
15
Uwaga 3
W wys
ł
uchanych wyk
ł
adach rozważano równoważność uk
ł
adów
wektorów, w odniesieniu do których, tylko ze względu na charakter
kierunku studiów przyjęto, że wektory reprezentują si
ł
y.
w tych zagadnieniach fizyki, w których dwa równoważne, zgodnie z tą
teorią, uk
ł
ady wektorów wywo
ł
ują w tym zagadnieniu ten sam skutek.
Uwaga 4
Teorię równoważności uk
ł
adów wektorów w mechanice stosuje się m.
in. do opisu zagadnień związanych z równowagą uk
ł
adów materialnych.
Każdy uk
ł
ad si
ł
jest równoważny uk
ł
adowi z
ł
ożonemu z wektora
równego sumie, zaczepionego w dowolnym punkcie i pary si
ł
o momencie równym momentowi uk
ł
adu si
ł
względem tego punktu.
3.2. Twierdzenie o redukcji
Jeżeli parę si
ł
wyznaczymy w taki sposób, by jedna z nich by
ł
a
zaczepiona w punkcie redukcji a następnie dodamy ją do wektora
16
Każdy uk
ł
ad si
ł
można zastąpić uk
ł
adem równoważnym z
ł
ożonym
z dwóch wektorów, z których jeden jest zaczepiony w dowolnie
wybranym punkcie.
zaczepiona w punkcie redukcji a następnie dodamy ją do wektora
równego sumie to:
O
ś
ś
ro
d
k
o
w
a
M
B
M
B
O
M
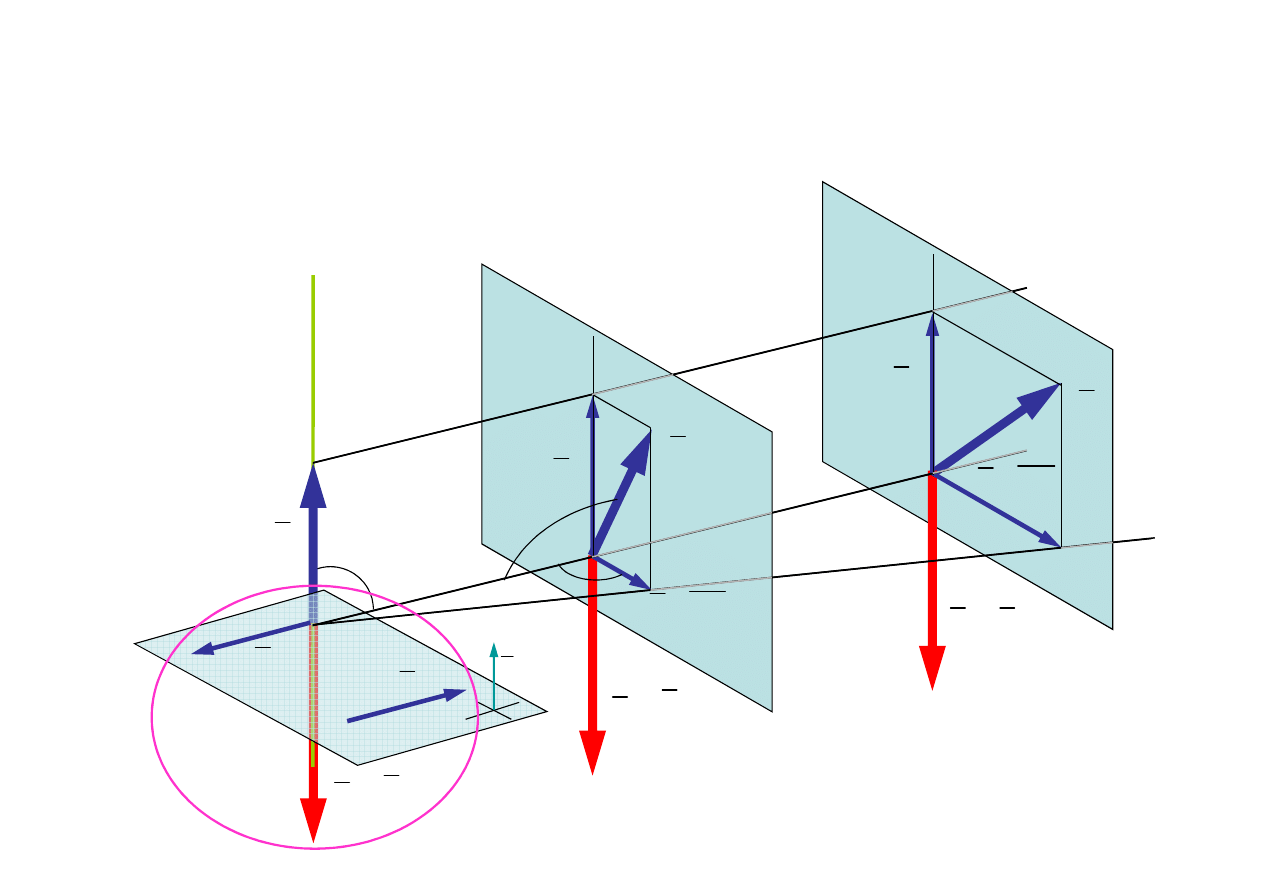
3.3. Przypadek ogólny
K
≠
0
- w
ł
asności wektorów zredukowanych
17
A
π
B
π
O
M
O
w
S
=
o
a
S
=
b
S
=
A
M
A
B
O
M
n
S
OA
×
F
F
−
o
o
S
OB
×
Skrętnik
O
ś
ś
ro
d
k
o
w
a
B
M
B
M
O
M
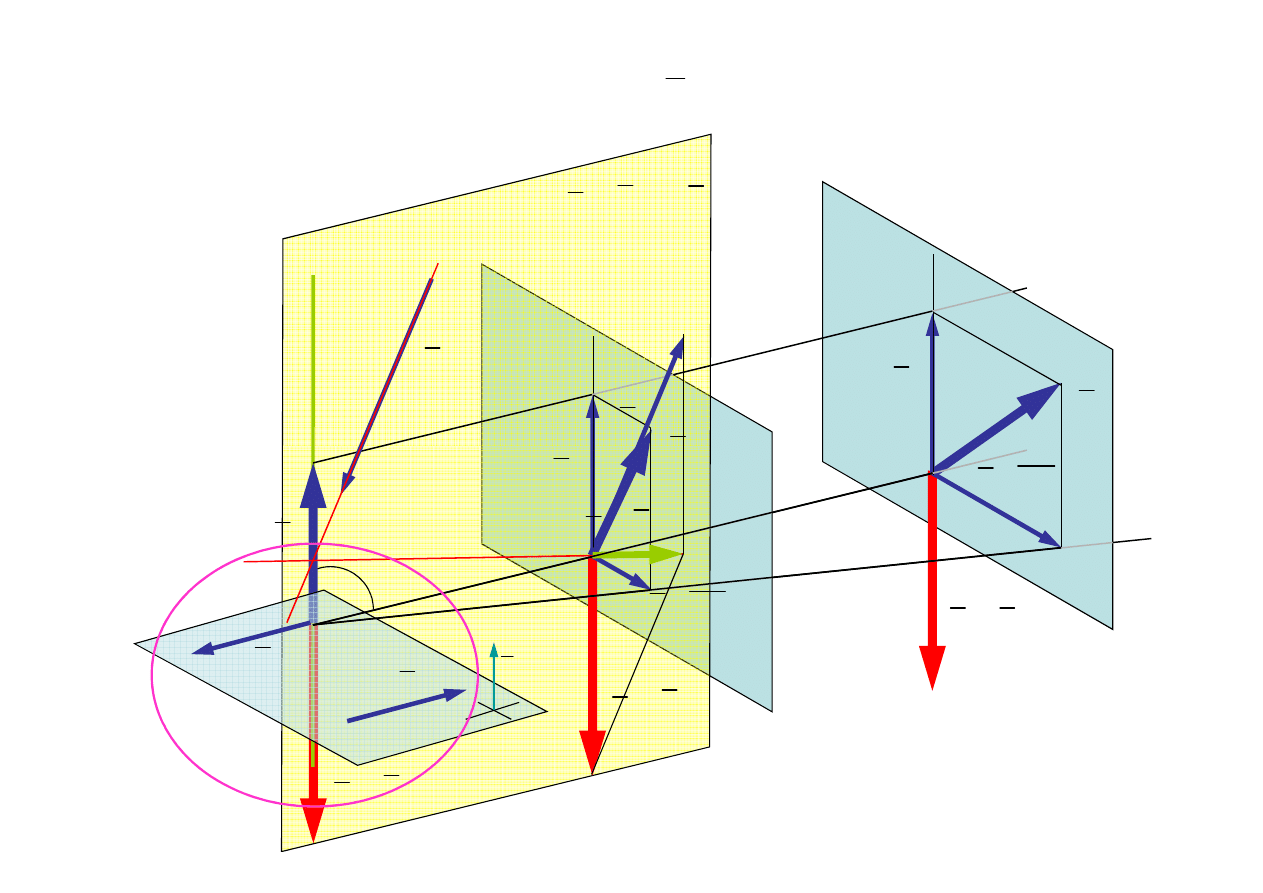
3.4. Przypadek szczególny
K
S
=
∩
≠
0
0
- redukcja do wypadkowej
W punkcie O prostej dzia
ł
ania wypadkowej uk
ł
ad si
ł
redukuje się do jednego wektora
w
S
M
= ∩
=
0
F
F
−
18
A
π
B
π
O
w
S
=
o
a
S
=
b
S
=
A
B
O
M
n
S
OA
×
A
M
O
M
F
F
−
S
OB
×
a
F
+
Wypadkowa
O
ś
ś
ro
d
k
o
w
a
B
M
B
M
O
M
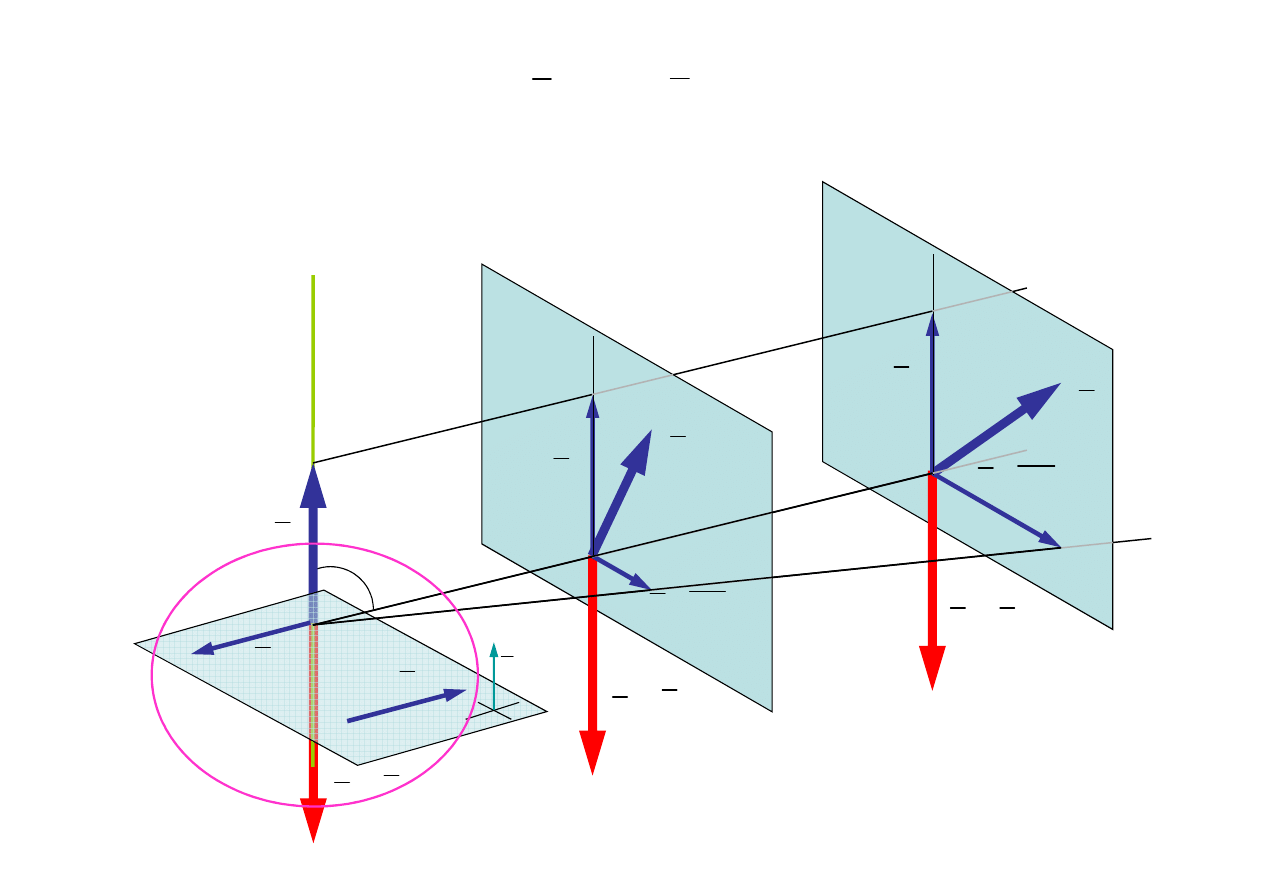
3.4. Przypadek szczególny
M
S
≠
∩
=
0
0
- redukcja do pary si
ł
W dowolnym punkcie przestrzeni uk
ł
ad si
ł
redukuje się do pary si
ł
19
A
π
B
π
O
w
S
=
o
a
S
=
b
S
=
A
B
O
M
n
S
OA
×
A
M
O
M
F
F
−
S
OB
×
Para si
ł
3.5. Przypadki redukcji - podsumowanie
Cztery przypadki redukcji
do najprostszej postaci
Cztery przypadki redukcji
w punkcie
Uk
ł
ad zerowy
1.
S
M
= ∩
=
0
0
2.
S
M
= ∩
≠
0
0
Uk
ł
ad zerowy
1.
S
M
= ∩
=
0
0
2.
S
M
= ∩
≠
0
0
20
Para si
ł
2.
S
M
= ∩
≠
0
0
Skrętnik
4.
K
≠
0
Wektor i para si
ł
(lub dwa wektory)
4.
S
M
≠ ∩
≠
0
0
Para si
ł
2.
S
M
= ∩
≠
0
0
Jeden wektor
3.
S
M
≠ ∩
=
0
0
Wypadkowa
3.
S
K
≠ ∩
=
0
0
Wyszukiwarka
Podobne podstrony:
MT st w 06 [tryb zgodności]
MT st w 08 [tryb zgodności]
MT st w 07 [tryb zgodności]
MT st w 03 [tryb zgodno┼Ťci]
MT st w 02a [tryb zgodno┼Ťci]
MT st w 02 [tryb zgodno┼Ťci]
MT st w 10 [tryb zgodności]
MT st w 06 [tryb zgodności]
MT st w 041 [tryb zgodno┼Ťci]
MT st w 10 [tryb zgodno┼Ťci]
MT st w 11 [tryb zgodno┼Ťci]
Chemia Jadrowa 05 [tryb zgodnosci]
1 ST PiS [tryb zgodnosci]
MT st w 04 cz1 [tryb zgodności]
MT st w 04 cz2 [tryb zgodności]
więcej podobnych podstron