
Wyk
ł
ad 10
MECHANIKA TEORETYCZNA
Studia stacjonarne I stopnia – rok akademicki 2013/14
Wyk
ł
ad 10
Autor:
Henryk Laskowski
Katedra Podstaw Mechaniki Ośrodków Ciąg
ł
ych
Instytut Mechaniki Budowli
Wydzia
ł
Inżynierii Lądowej
ZASADA PRAC WIRTUALNYCH
WARUNKI RÓWNOWAGI SI
Ł

Część 1
Więzy
Więzy
– ograniczenia na
ł
ożone na cia
ł
o materialne
1.1. Definicja
Ruch swobodny (przy ca
ł
kowitym
braku więzów)
3
Ograniczenie na
ł
ożone na jeden
punkt bry
ł
y sztywnej:
1
A
( )
A
r t
const
=
Ograniczenie na
ł
ożone na wszystkie
punkty bry
ł
y sztywnej:
( )
0
z t
z
≥

Kinematyczne (nieholonomiczne):
Geometryczne (holonomiczne):
(
)
1
1
1
n
n
n
f x , y ,z , ... , x , y ,z ,t
warunek na
ł
o
ż
ony na funkcj
ę
(
)
1
1
1
1
1
1
n
n
n
n
n
n
f x , y ,z , ... , x , y ,z , x , y ,z , ... , x , y ,z ,t
& &
& &
&
&
warunek na
ł
o
ż
ony na funkcj
ę
1.2. Rodzaje więzów
4
(
)
1
1
1
1
1
1
n
n
n
n
n
n
f x , y ,z , ... , x , y ,z , x , y ,z , ... , x , y ,z ,t
& &
& &
&
&
Stacjonarne (skleronomiczne,
nie zależne jawnie od czasu):
Niestacjonarne (reonomiczne,
zależne jawnie od czasu):
(
)
1
1
1
1
1
1
n
n
n
n
n
n
f x , y ,z , ... , x , y ,z , x , y ,z , ... , x , y ,z
& &
& &
&
&
warunek na
ł
o
ż
ony na funkcj
ę
warunek na
ł
o
ż
ony na funkcj
ę
(
)
1
1
1
1
1
1
n
n
n
n
n
n
f x , y ,z , ... , x , y ,z , x , y ,z , ... , x , y ,z , t
& &
& &
&
&

Szorstkie (chropowate):
Rodzaje więzów (cd.)
G
ł
adkie (idealne):
wi
ę
zy, których praca reakcji jest równa 0
wi
ę
zy, których praca reakcji jest ró
ż
na od 0
5
Dwustronne (równościowe):
Jednostronne (nierównościowe):
warunek na
ł
o
ż
ony na ruch w postaci równo
ś
ci
warunek na
ł
o
ż
ony na ruch w postaci nierówno
ś
ci

Rodzaje więzów (cd.)
Geometryczne
Kinematyczne
Stacjonarne
Niestacjonarne
6
G
ł
adkie
Szorstkie
Jednostronne
Dwustronne
( )
A
r t
const
=
( )
( )
( )
1
2
3
0
0
0
A
x
A
y
A
z
f : x
t
C
f : y
t
C
f : z
t
C
−
=
−
=
−
=
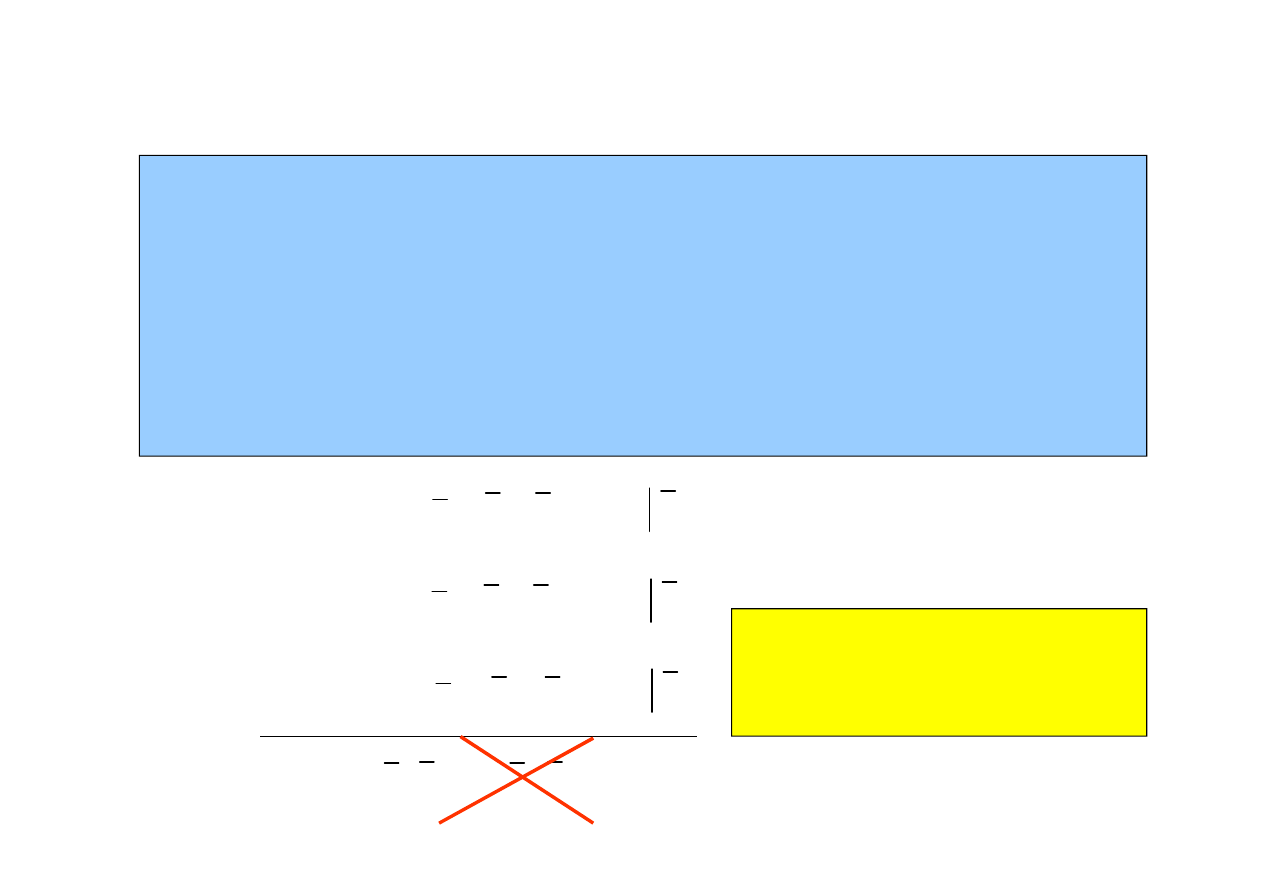
Przyk
ł
ad 1:
Ruch bry
ł
y sztywnej wokó
ł
punktu
o ustalonym po
ł
ożeniu bez strat energii
1.3. Przyk
ł
ady ruchu z więzami
7
A
geometryczne
stacjonarne
dwustronne
g
ł
adkie
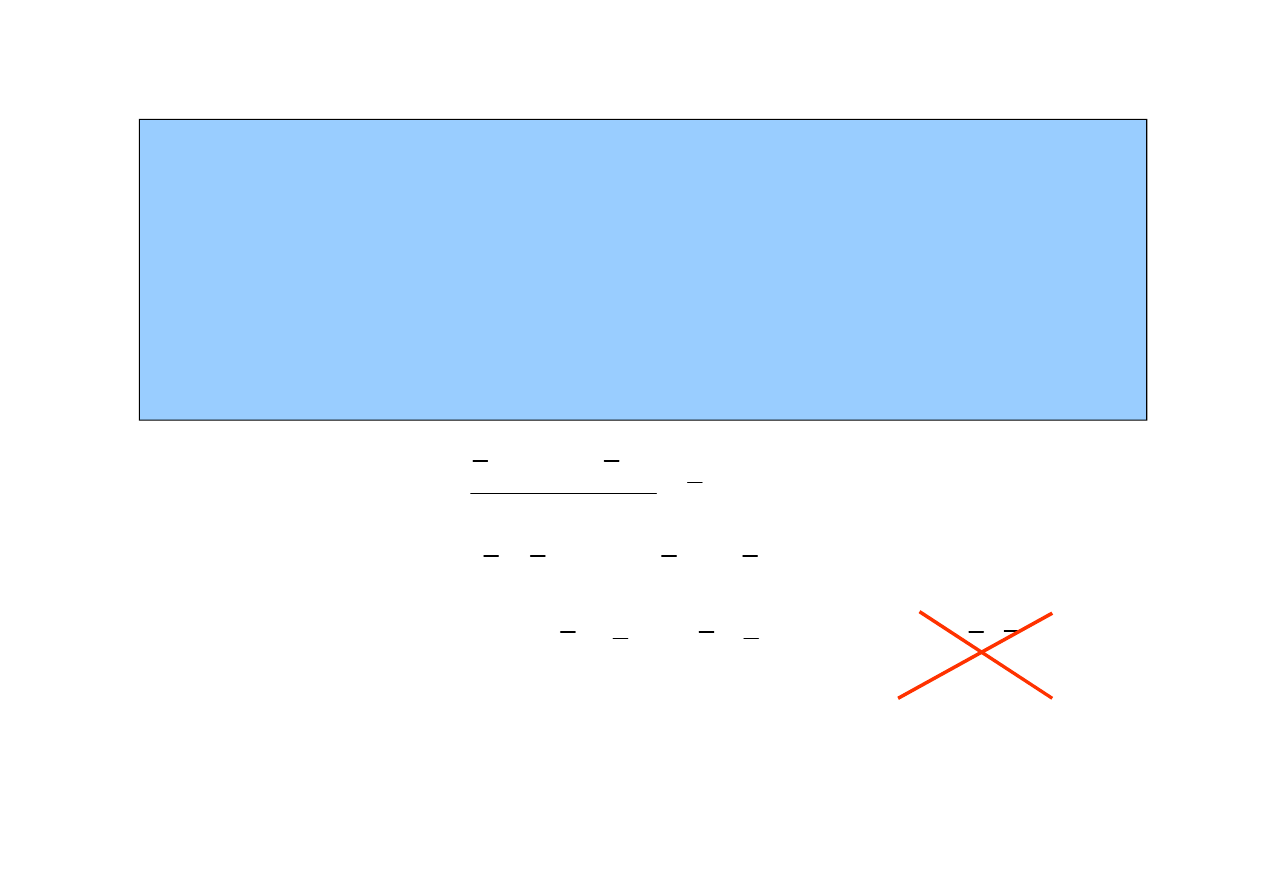
Przyk
ł
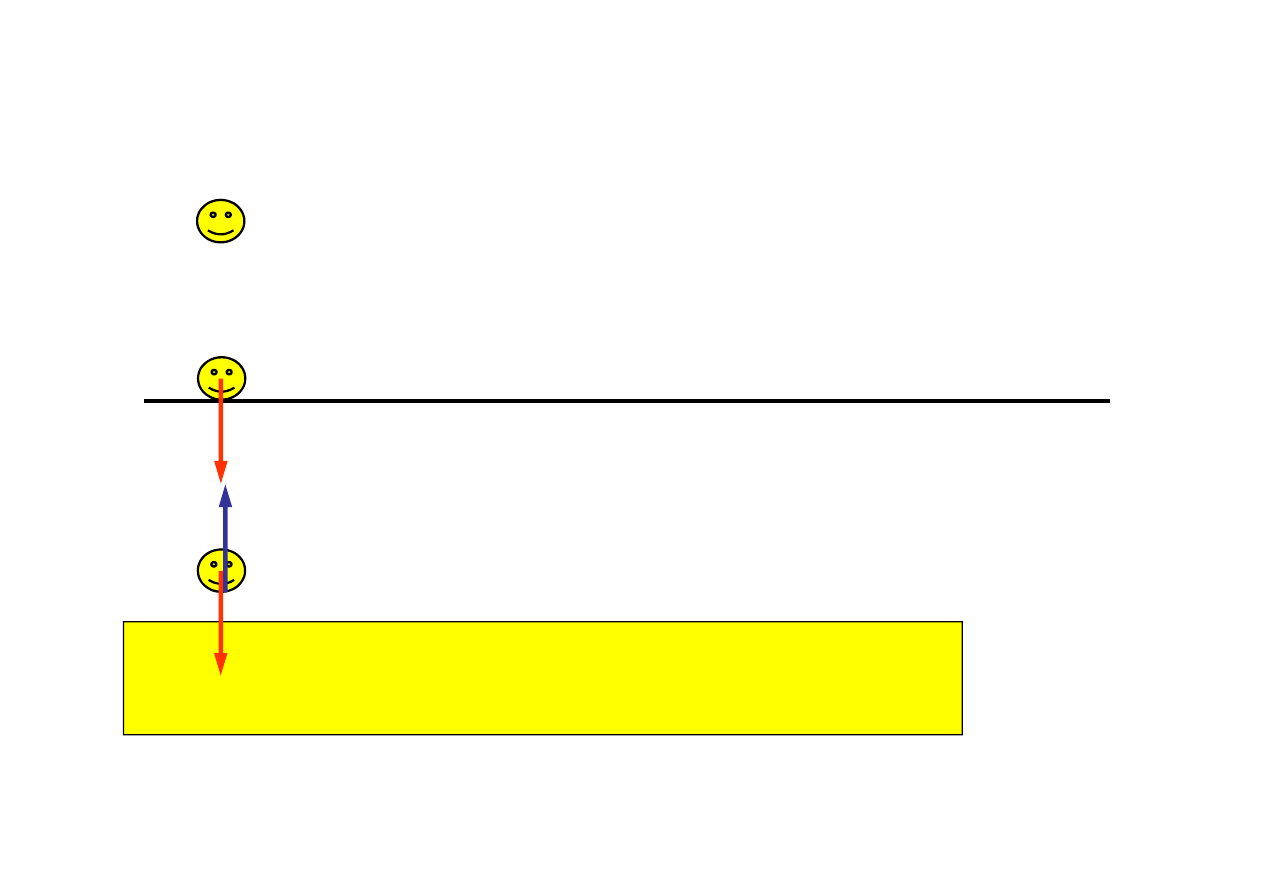
ad 2:
Ruch swobodny punktu materialnego
w polu grawitacyjnym ze zderzeniem
sprężysto-plastycznym z szorstką
powierzchnią
( )
0
A
z
t
z
≥
( )
1
0
0
A
f : z
t
z
− ≥
8
geometryczne
stacjonarne
jednostronne
szorstkie
Praca wi
ę
zów jest ró
ż
na od 0
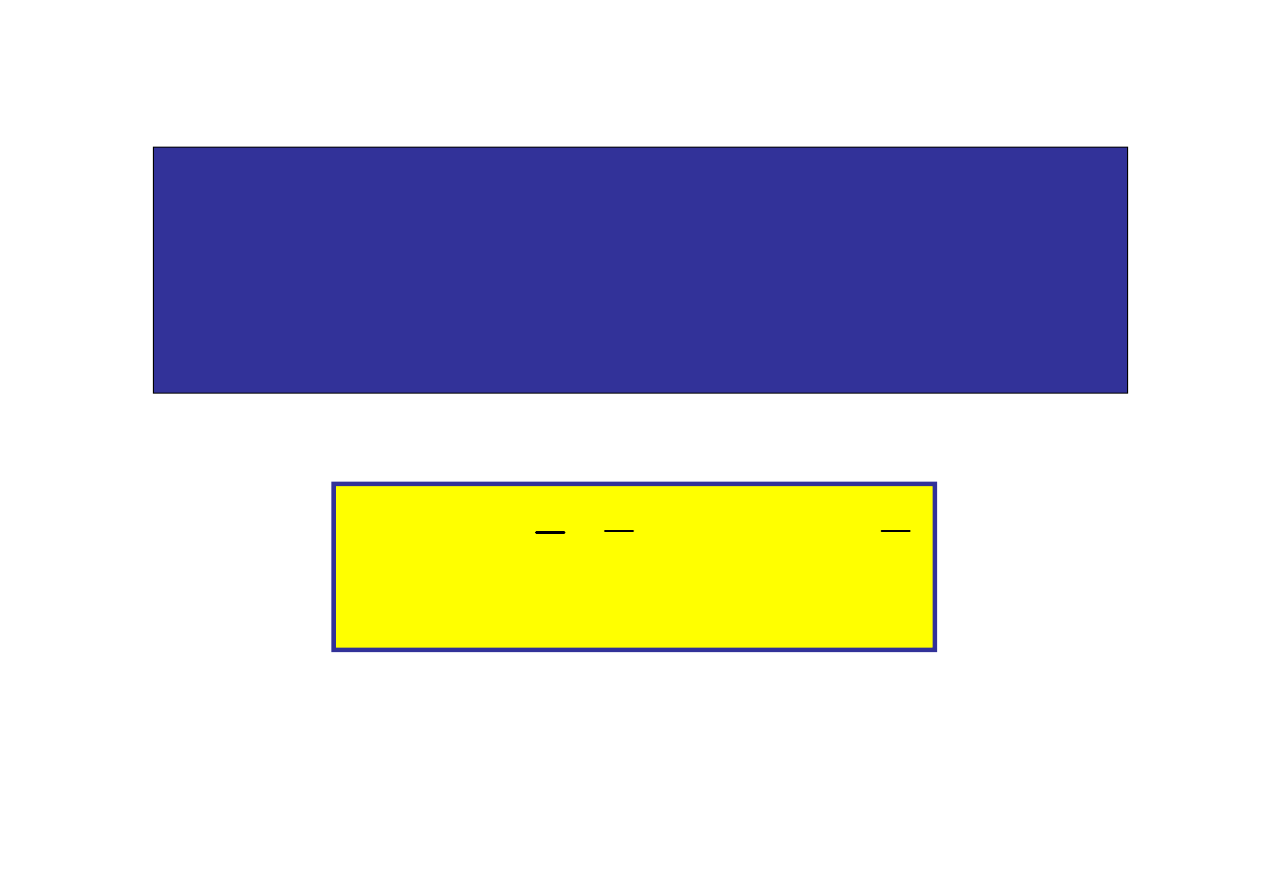
Przyk
ł
ad 3:
Ruch punktu materialnego w polu grawitacyjnym bez tarcia po prostej
poruszającej się w p
ł
aszczyźnie Oxy równoleg
ł
ej do linii si
ł
pola
( )
( ) ( )
(
)
ρ t
ξ t , η t
=
φ
ω t
= ⋅
cos φ
sin φ
α
sin φ cos φ
=
−
%
( )
( )
x t
ξ t
cos ωt
sin ωt
−
( )
( )
10
η t
ξ t
=
−
9
( )
( )
( )
( )
x t
ξ t
cos ωt
sin ωt
y t
η t
sin ωt
cos ωt
−
=
⋅
( )
( )
( )
( )
( )
( )
1
2
0
0
f : x t
cos ωt ξ t
sin ωt η t
f :
y t
sin ωt ξ t
cos ωt η t
−
⋅
+
⋅
=
−
⋅
−
⋅
=
geometryczne
niestacjonarne
dwustronne
g
ł
adkie
Ruch swobodny, gdy na punkt materialny nie dzia
ł
ają żadne si
ł
y
Ruch po poziomej powierzchni (bez tarcia) w polu grawitacyjnym
10
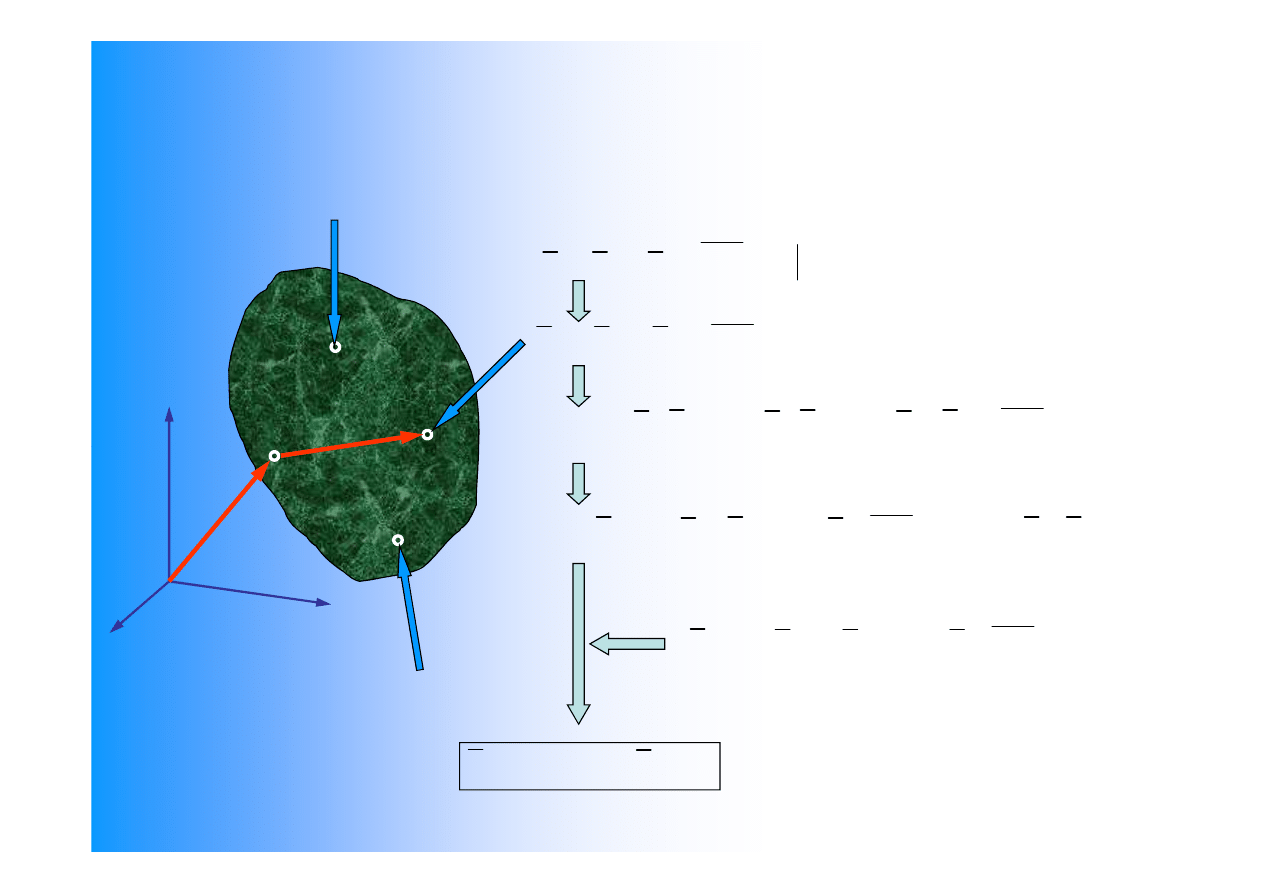
Aksjomat o więzach
W ruchu cia
ł
a nieswobodnego nic się nie zmieni, gdy więzy myślowo
zostaną usunięte i ich dzia
ł
anie zostanie zastąpione si
ł
ami reakcji
Ruch w polu grawitacyjnym pod dzia
ł
aniem si
ł
y grawitacji i reakcji więzów
Część 2
Zasada prac wirtualnych
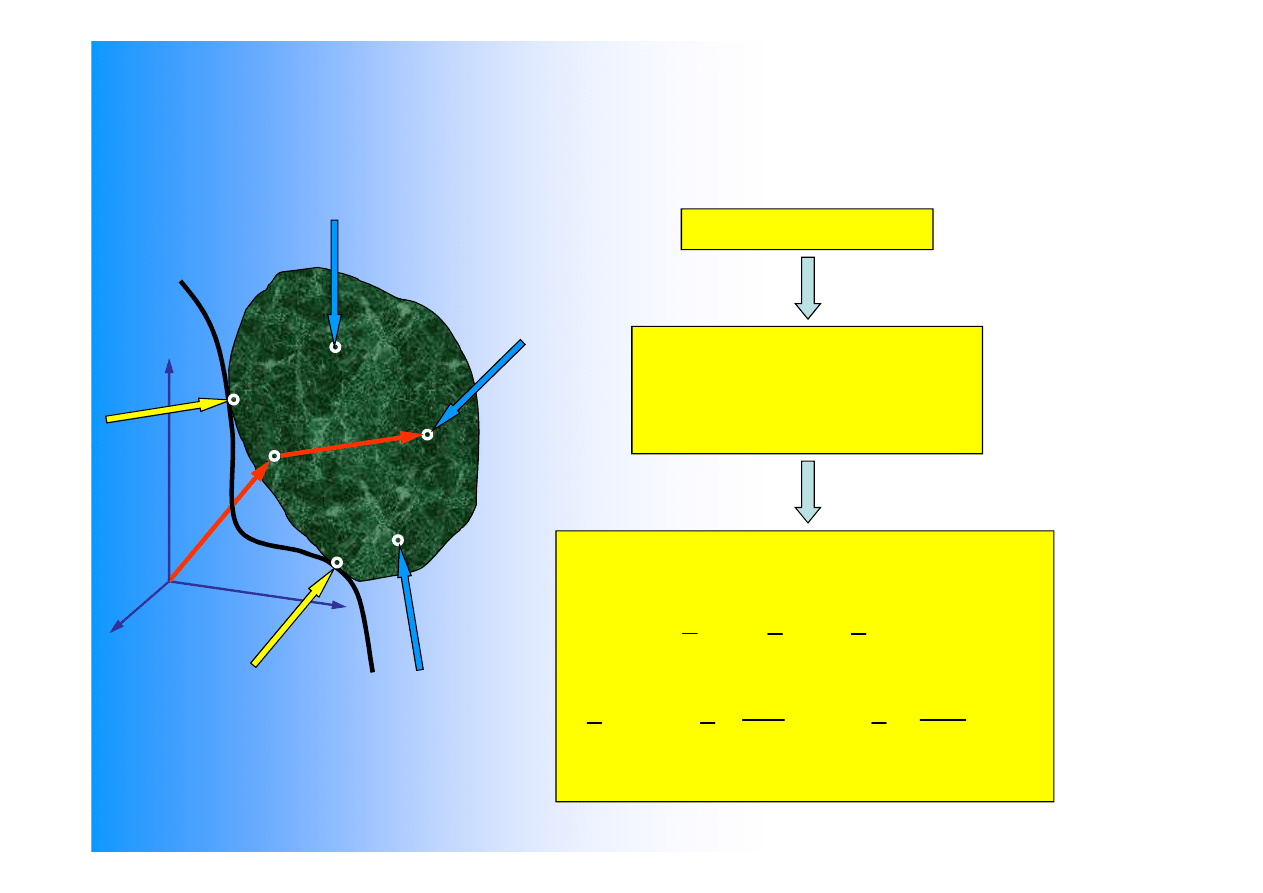
11

2.1. Przemieszczenie wirtualne
Przemieszczenie rzeczywiste
– wektor
ł
ączący dwa rzeczywiste po
ł
ożenia
cia
ł
a. Jest zależne od więzów i dzia
ł
ających si
ł
Przemieszczenie wirtualne
– wektor
ł
ączący dwa możliwe po
ł
ożenia
cia
ł
a. Jest zależne wy
ł
ącznie od więzów
12
Przemieszczenie wirtualne jest wspó
ł
liniowe z prędkością możliwą, na jaką pozwalają
więzy
{ }
0
s
ˆ
δ
k υ , k
R
= ⋅
∈ −
Problem
1. Uk
ł
ad materialny jest zdefiniowany za pomocą n punktów materialnych
2. Więzy opisane są przez m niezależnych równań
3. Więzy są geometryczne, stacjonarne, g
ł
adkie
Jaki warunek musi spe
ł
niać przemieszczenie wirtualne punktu i
gdzie:
( )
( )
( )
1
x
x t , y
y t , z
z t
i
, ..., n
=
=
=
=
(
)
1
1
1
0
1
j
n
n
n
f
x , y ,z , ... , x , y ,z
j
, ...,m
=
=
Równanie więzów:
13
gdzie:
(
)
1
1
1
0
1
j
n
n
n
d
f
x , y ,z , ... , x , y ,z
j
, ...,m
dt
=
=
( )
( )
( )
1
i
i
i
i
i
i
x
x t , y
y t , z
z t
i
, ..., n
=
=
=
=
Różniczkowanie po t:
1
0
1
n
j
j
j
i
i
i
i
i
i
i
f
f
f
x
y
z
j
, ...,m
x
y
z
=
∂
∂
∂
+
+
=
=
∂
∂
∂
∑
&
&
&
1
1
1
1
1
1
0
1
j
j
j
j
j
j
n
n
n
n
n
n
f
f
f
f
f
f
dx
dy
dz
dx
dy
dz
...
j
, ...,m
x dt
y dt
z dt
x
dt
y
dt
z
dt
∂
∂
∂
∂
∂
∂
+
+
+ +
+
+
=
=
∂
∂
∂
∂
∂
∂
1
0
1
n
j
j
j
i
i
i
i
i
i
i
f
f
f
x
y
z
j
, ...,m
x
y
z
=
∂
∂
∂
+
+
=
=
∂
∂
∂
∑
&
&
&
Przesunięcie wirtualne punktu A
i
:
(
)
(
)
si
i
i
i
i
xi
yi
zi
δ
k υ
kx , ky , kz
δ , δ , δ
= ⋅ =
=
&
&
&
k
⋅
1
0
1
n
j
j
j
xi
yi
zi
i
i
i
i
f
f
f
δ
δ
δ
j
, ...,m
x
y
z
=
∂
∂
∂
+
+
=
=
∂
∂
∂
∑
14
1
i
i
i
i
x
y
z
=
∂
∂
∂
j
j
j
i
j
i
i
i
f
f
f
grad f
,
,
x
y
z
∂
∂
∂
=
∂
∂
∂
1
0
n
si
i
j
i
grad f
δ
=
⋅
=
∑
Problem
1. Uk
ł
ad materialny jest zdefiniowany za pomocą n punktów materialnych
2. Więzy opisane są przez m niezależnych równań
3. Więzy są geometryczne, stacjonarne, g
ł
adkie i dwustronne
4. Uk
ł
ad materialny jest obciążony uk
ł
adem si
ł
czynnych i reakcji więzów
5. Uk
ł
ad materialny znajduje się w spoczynku
Jaki warunek musi spe
ł
niać uk
ł
ad si
ł
aby uk
ł
ad materialny pozostawa
ł
w równowadze
2.2. Zasada prac wirtualnych
15
Jaki warunek musi spe
ł
niać uk
ł
ad si
ł
aby uk
ł
ad materialny pozostawa
ł
w równowadze
Zerowanie się pracy si
ł
czynnych
na przemieszczeniach wirtual-
nych jest warunkiem koniecznym
równowagi uk
ł
adu materialnego
1
1
1
1
0
0
0
i
i
i
i
n
n
n
n
m r
F
R
...
m r
F
R
...
m r
F
R
⋅ = +
=
⋅ = + =
⋅ =
+
=
&&
&&
&&
Równania ruchu:
1
s
δ
⋅
si
δ
⋅
sn
δ
⋅
1
1
0
n
n
i
si
i
si
i
i
δL
F δ
R δ
−
−
=
⋅ +
⋅
=
∑
∑
Problem
1. Uk
ł
ad materialny jest zdefiniowany za pomocą n punktów materialnych
2. Więzy opisane są przez m niezależnych równań
3. Więzy są geometryczne, stacjonarne, g
ł
adkie i dwustronne
4. Uk
ł
ad materialny jest obciążony uk
ł
adem si
ł
czynnych i reakcji więzów
5. Uk
ł
ad materialny znajduje się w ruchu rzeczywistym
Jaki warunek spe
ł
nia teraz uk
ł
ad si
ł
?
16
Iloraz różnicowy:
(
) ( )
i
i
i
r t
∆t
r t
r
∆t
+
−
≈
&
(
) ( )
( )
2
0
i
i
i
i
∆r
r t
∆t
r t
r ∆t
∆ t
=
+
−
=
+
&
( )
(
)
2
1
1
1
0
n
n
n
i
i
i
i
i
si
i
i
i
δL
F ∆r
F
r ∆t
∆ t
F δ
∆L
=
=
=
=
⋅
=
⋅
+
=
⋅ +
∑
∑
∑
&
W ruchu rzeczywistym:
0
δL
≠
Zasada prac wirtualnych
Warunkiem koniecznym i wystarczającym równowagi uk
ł
adu si
ł
dzia
ł
ających na uk
ł
ad materialny swobodny lub nieswobodny
o więzach geometrycznych, stacjonarnych, dwustronnych i g
ł
ad-
kich jest, by suma prac wirtualnych wszystkich si
ł
czynnych, na
wszystkich przemieszczeniach wirtualnych, by
ł
a równa 0
17
1
0
n
i
si
si
i
δL
F δ
,
δ
−
=
⋅
=
∀
∑
2.3. Równania równowagi
i
A
A
i
υ
υ
ω
AA
= +
×
{ }
0
k ,
k
R
⋅
∈ −
si
sA
ωA
i
δ
δ
δ
AA
=
+
×
(
)
n
n
n
i
si
i
sA
i
ωA
i
δL
F δ
F δ
F
δ
AA
=
⋅
=
⋅
+
⋅
×
∑
∑
∑
Warunki równowagi si
ł
dzia
ł
ających na cia
ł
o sztywne swobodne
z
F
1
F
i
A
i
A
1
A
18
(
)
1
1
1
i
si
i
sA
i
ωA
i
i
i
i
=
=
=
∑
∑
∑
(
)
1
1
0
n
n
sA
i
ωA
i
i
sA
ωA
i
i
δL
δ
F
δ
F
A A
δ ,δ
=
=
=
⋅
+
⋅
×
=
∀
∑
∑
(
)
1
1
n
n
i
A
i
i
i
i
S
F , M
F
A A
=
=
=
=
×
∑
∑
0
0
A
S
M
=
∩
=
O
x
y
r
A
F
n
A
n
Warunki równowagi si
ł
dzia
ł
ających na cia
ł
o sztywne nieswobodne
A
A
i
A
1
z
F
1
F
i
R
1
B
1
Postulat o więzach
Cia
ł
o zostaje oswobodzone
z więzów, jednocześnie
poddane jest dzia
ł
aniu
uk
ł
adu si
ł
czynnych i reakcji
19
A
n
O
x
y
r
A
F
n
R
1
R
j
B
j
uk
ł
adu si
ł
czynnych i reakcji
(
) (
)
1
1
1
1
0
0
n
m
i
j
i
j
n
m
A
i
i
j
j
i
j
S
F
R
M
F
A A
R
B A
=
=
=
=
=
+
=
=
×
+
×
=
∑
∑
∑
∑
Warunki równowagi cia
ł
a swobodnego
1
1
1
1
0
0
0
0
0
0
n
m
x
ix
jx
i
j
n
m
y
iy
jy
i
j
n
m
S
F
R
S
F
R
S
F
R
=
=
=
=
= ⇔
+
=
= ⇔
+
=
= ⇔
+
=
∑
∑
∑
∑
∑
∑
Równania równowagi – postać ogólna
20
( )
( )
( )
( )
( )
( )
1
1
1
1
1
1
1
1
0
0
0
0
0
0
0
0
z
iz
jz
i
j
n
m
Ax
Ax
i
Ax
j
i
j
n
m
Ay
Ay
i
Ay
j
i
j
n
m
Az
Az
i
Az
j
i
j
S
F
R
M
M
F
M
R
M
M
F
M
R
M
M
F
M
R
=
=
=
=
=
=
=
=
= ⇔
+
=
= ⇔
+
=
= ⇔
+
=
= ⇔
+
=
∑
∑
∑
∑
∑
∑
∑
∑
0
0
0
x
y
Az
S
S
M
=
=
=
0
0
0
0
Az
Bz
Cz
M
M
AB AC
M
=
=
×
≠
=
Uzasadnienie warunku nie wspó
ł
liniowości punktów
Uk
ł
ad 1
Uk
ł
ad 2
2.3. Równania równowagi w odniesieniu do uk
ł
adów p
ł
askich
21
0
0
0
l
Az
Bz
S
M
AB
l
M
=
=
⊥
=
0
0
0
B
C
Az
Bz
M
S
AB
AB AC
AC
λ AB
M
M
M
S
λ AB
= ×
×
=
⇒
= ⋅
⇒
= ∩
=
= × ⋅
Gdy A, B, C wspó
ł
liniowe to jedno z równań jest zależne
Uzasadnienie warunku nie prostopad
ł
ości prostej l i wektora AB
0
l
S
=
Jeśli punkty A i B leżą na prostej dzia
ł
ania wypadkowej (uk
ł
ad nie
jest w równowadze) oraz prosta l jest prostopad
ł
a do AB to:
Bez sformu
ł
owanego warunku uk
ł
ad równań 3 nie stanowi
jednoznacznego warunku równowagi uk
ł
adu si
ł
Uk
ł
ad 3
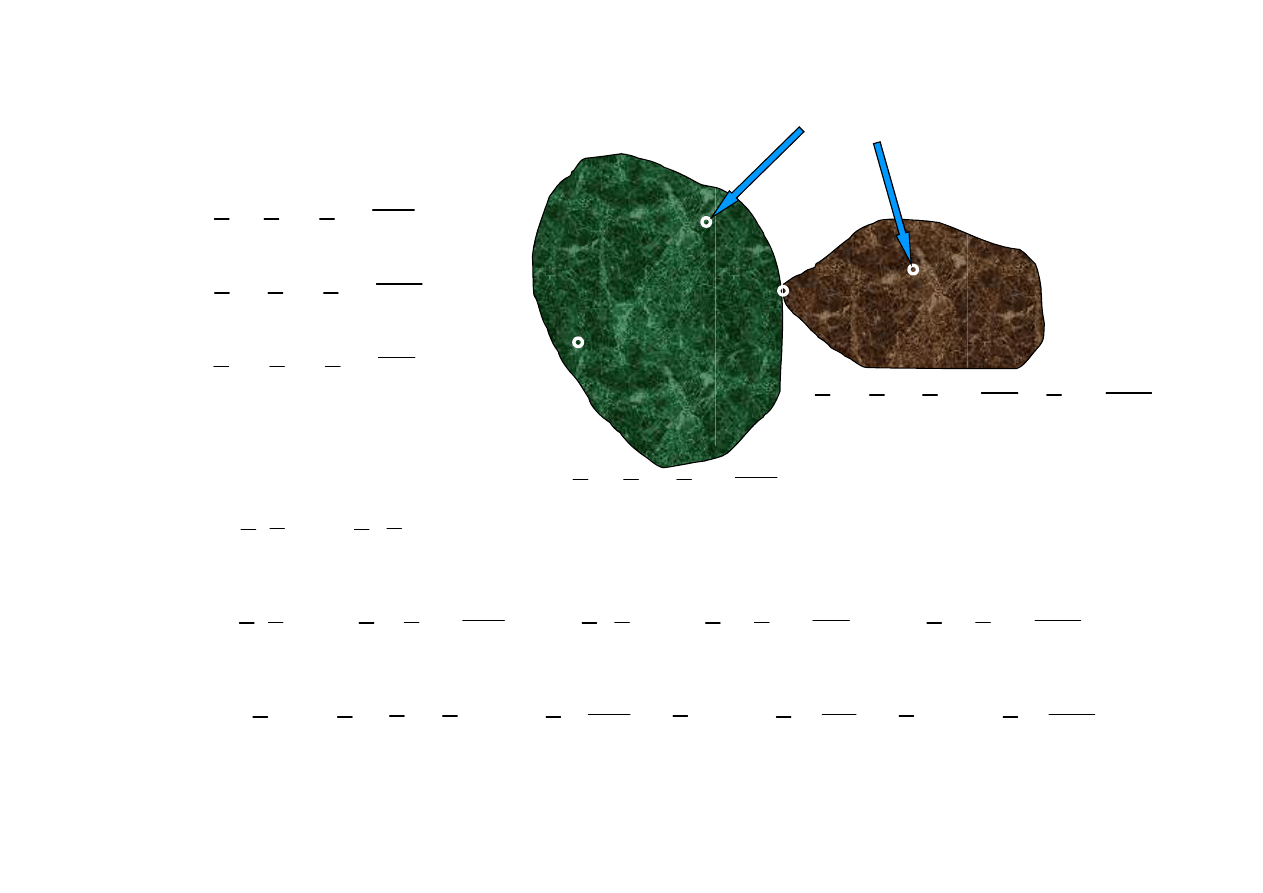
2.4. Równania równowagi dwóch tarcz po
ł
ączonych przegubem
A
A
i
B
B
j
F
i
F
j
i
A
A
i
υ
υ
ω
AA
= +
×
j
B
B
j
υ
υ
ω
BB
= +
×
B
A
A
υ
υ
ω
AB
= +
×
j
A
ωA
ωB
j
δ
δ
δ
AB δ
BB
=
+
×
+
×
22
i
A
ω
A
i
δ
δ
δ
AA
=
+
×
(
)
(
)
(
)
i
A
i
ωA
i
j
A
j
ωA
j
ωB
j
i
i
j
j
j
δL
F δ
F
δ
AA
F δ
F
δ
AB
F
δ
BB
=
⋅ +
⋅
×
+
⋅ +
⋅
×
+
⋅
×
∑
∑
∑
∑
∑
i
j
A
ωA
i
i
ωA
j
ωB
j
j
i
j
i
j
j
δL
F
F
δ
δ
F
A A
δ
F
BA
δ
F
B B
=
+
⋅
+
⋅
×
+
⋅
×
+
⋅
×
∑
∑
∑
∑
∑
i
i
j
j
i
j
δL
F δ
F δ
=
⋅ +
⋅
∑
∑
A
A
i
B
B
j
F
i
F
j
ωA
i
i
ωA
j
i
j
δ
F
A A
δ
F
BA
δ
F
A A
δ
F
B A
δ
F
B B
⋅
×
+
⋅
×
=
=
⋅
×
+
⋅
×
−
⋅
×
∑
∑
∑
∑
∑
j
j
BA
B A B B
=
−
23
ω
A
i
i
ω
A
j
j
ω
A
j
j
i
j
j
δ
F
A A
δ
F
B A
δ
F
B B
=
⋅
×
+
⋅
×
−
⋅
×
∑
∑
∑
( )
( )
( )
ωA
A
i
A
j
ωA
B
j
δ
M
F
M
F
δ
M
F
=
⋅
+
−
⋅
( )
( )
( )
( )
( )
( )
0
i
j
A
ωA
A
i
A
j
ωA
B
j
ωB
B
j
δL
S F
S F
δ
δ
M
F
M
F
δ
M
F
δ
M
F
=
+
⋅ +
⋅
+
−
⋅
+
⋅
=
( )
( )
( )
( )
( )
0
0
0
i
j
A
i
A
j
B
j
S F
S F
, M
F
M
F
, M
F
+
=
+
=
=
Wyszukiwarka
Podobne podstrony:
MT st w 10 [tryb zgodno┼Ťci]
MT st w 06 [tryb zgodności]
MT st w 08 [tryb zgodności]
MT st w 05 [tryb zgodności]
MT st w 07 [tryb zgodności]
MT st w 03 [tryb zgodno┼Ťci]
MT st w 02a [tryb zgodno┼Ťci]
MT st w 02 [tryb zgodno┼Ťci]
MT st w 06 [tryb zgodności]
MT st w 041 [tryb zgodno┼Ťci]
MT st w 11 [tryb zgodno┼Ťci]
MT st w 10
1 ST PiS [tryb zgodnosci]
MT st w 10
Chemia organiczna wyk�ad 10 [tryb zgodnosci]
więcej podobnych podstron