
1
Wykład 3
MECHANIKA TEORETYCZNA
Studia stacjonarne I stopnia – rok akademicki 2011/12
Autor:
Henryk Laskowski
Katedra Podstaw Mechaniki Ośrodków Ciągłych
Instytut Mechaniki Budowli
Wydział Inżynierii Lądowej
TEORIA RÓWNOWAŻNOŚCI UKŁADÓW SIŁ

Część 1
SIŁY I UKŁADY SIŁ
3
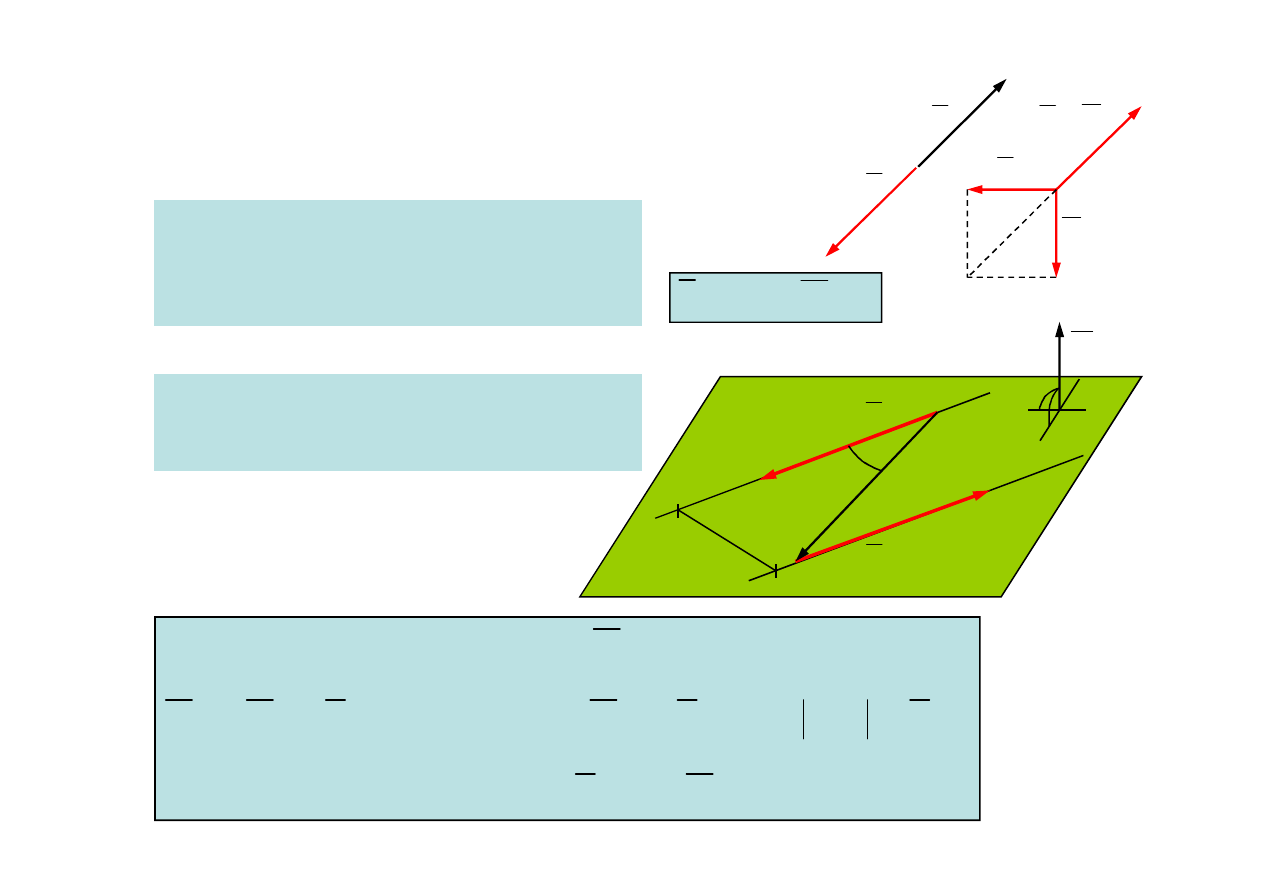
1.1. Moment siły względem punktu
ną
prawoskręt
trójkę
stanowią
:
zwrot
:
wartość
:
kierunek
B
B
B
B
df
B
M
AB
F
AB
F
M
AB
M
F
M
AB
F
M
,
,
α
sin
|
|
|
|
|
|
:
____
____
____
____
B
M
___
____
AB
r
F
B
A
α
.
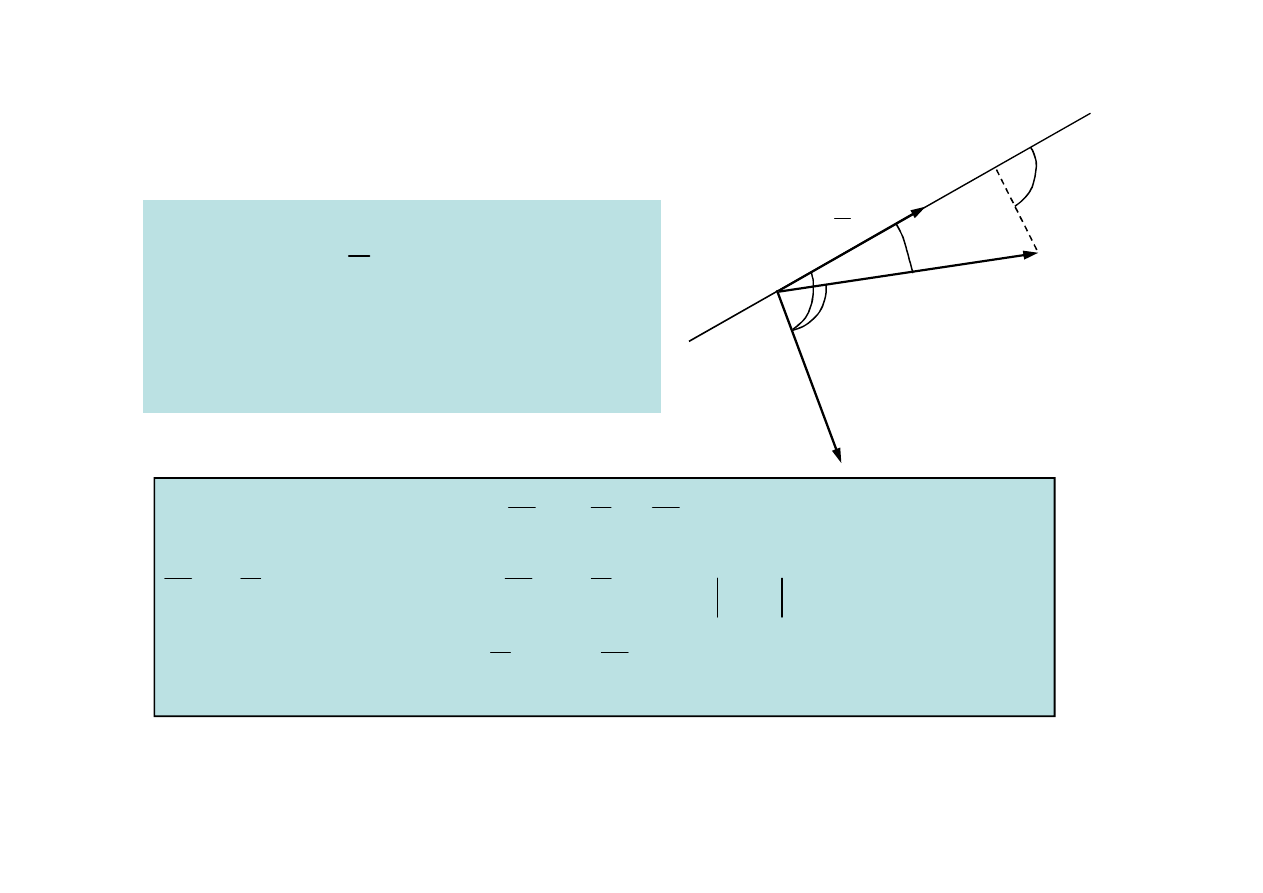
Definicja
Momentem siły względem punktu
nazywamy wektor równy iloczynowi
wektorowemu siły i wektora wyznaczone-
go przez punkt zaczepienia siły i punkt,
względem którego moment jest liczony
B
M
___
F
B
4
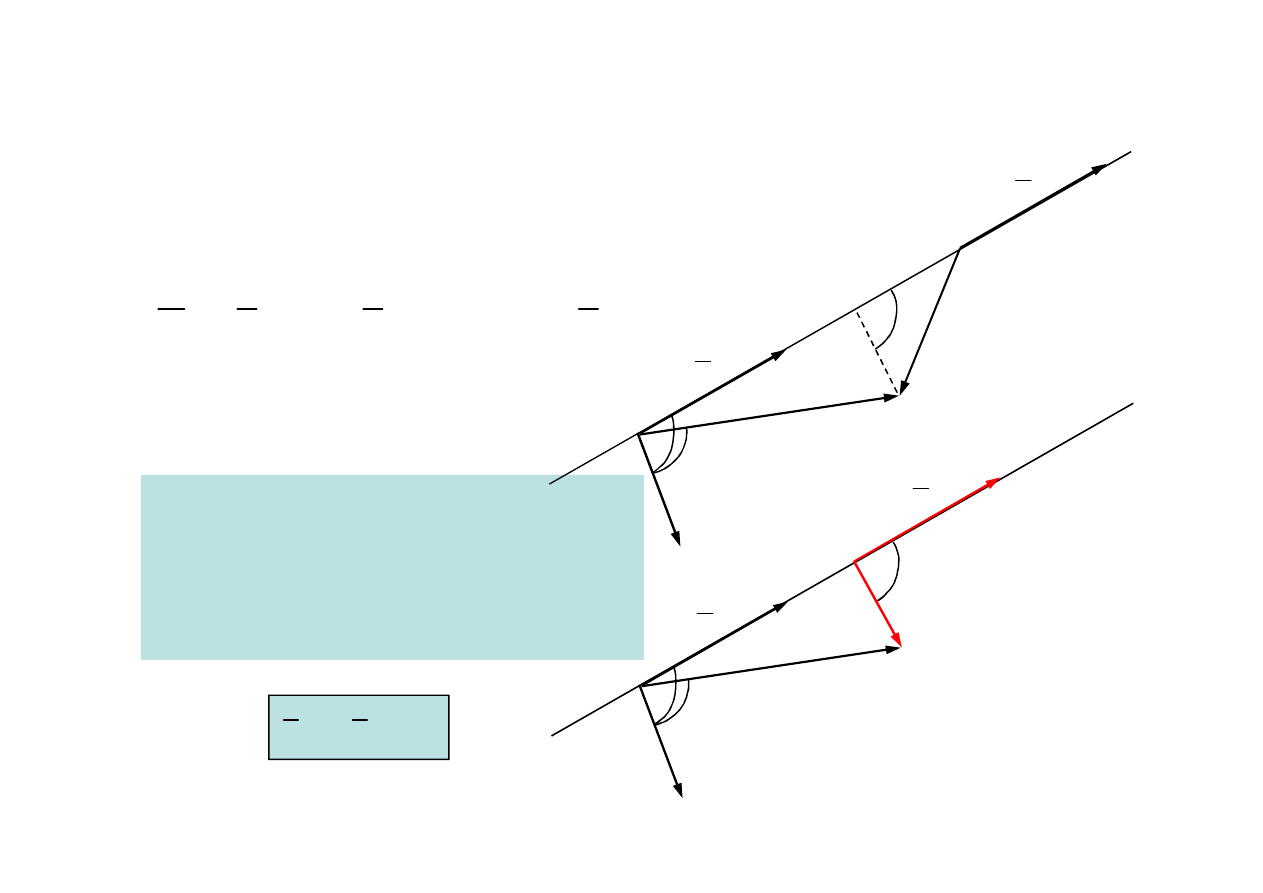
Przesunięcie siły wzdłuż jej kierunku działania
Przesunięcie siły wzdłuż jej kierunku działania nie wpływa
na zmianę wartości momentu siły względem punktu
_______
____
____
____
____
const
BR
F
BR
AB
F
AR
F
M
R
)
(
Ramię działania siły
Jest to wektor prostopadły do prostej
działania siły, którego początek leży na
tej prostej a koniec w punkcie, względem
którego liczony jest moment siły
R
M
___
____
AR
r
F
R
A
.
B
F
____
BR
'
R
____
R
M
F
R' R
R
M
___
____
AR
F
R
A
.
F
____
' R
R
'
R
5
n
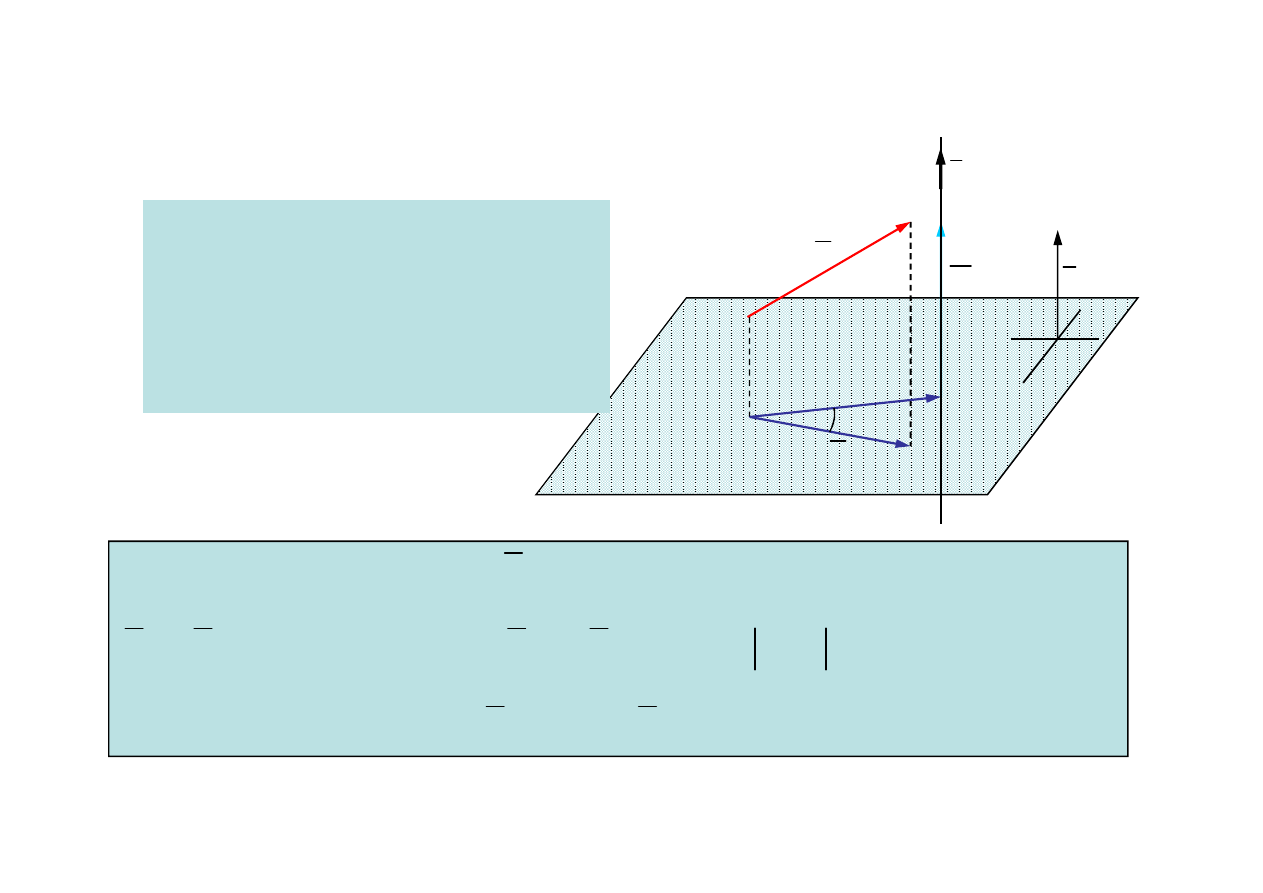
1.2. Moment siły względem prostej
____
____
π
π
____
π
||
'
:
|
| |
| |
'
| sin α
,
' ,
l
df
l
l
l
kierunek: M
l
M
F
A O
wartość: M
F
A O
zwrot:
F
A O M
stanowią trójkę prawoskrętną
Definicja
Momentem siły względem prostej
nazywamy iloczyn wektorowy rzutu
siły na płaszczyznę prostopadłą do tej
prostej względem punktu przebicia
płaszczyzny przez tę prostą.
l
M
'
A
π
F
O
α
____
' O
A
F
l
e
A
6
l
M
n
α
____
' O
A
O
'
A
π
F
F
A
l
e
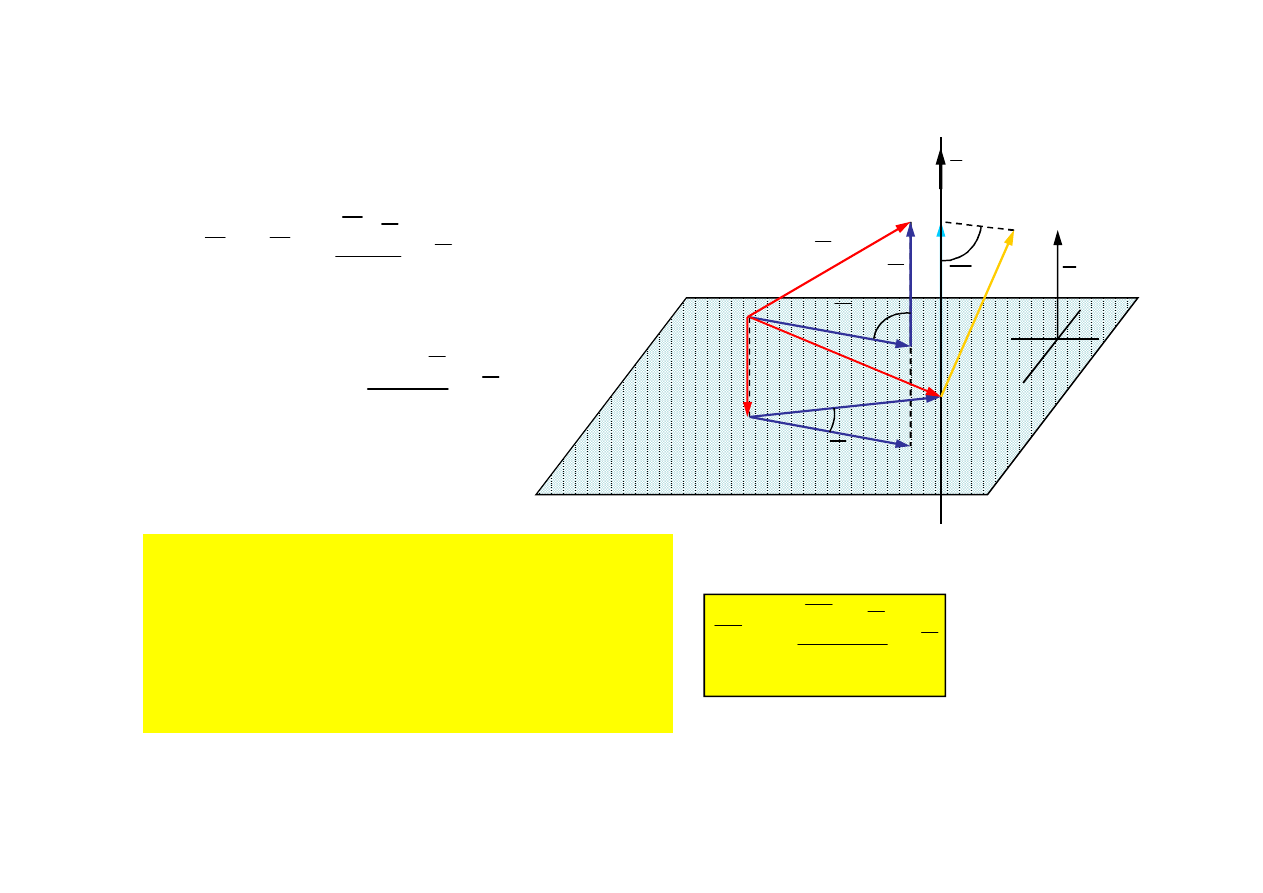
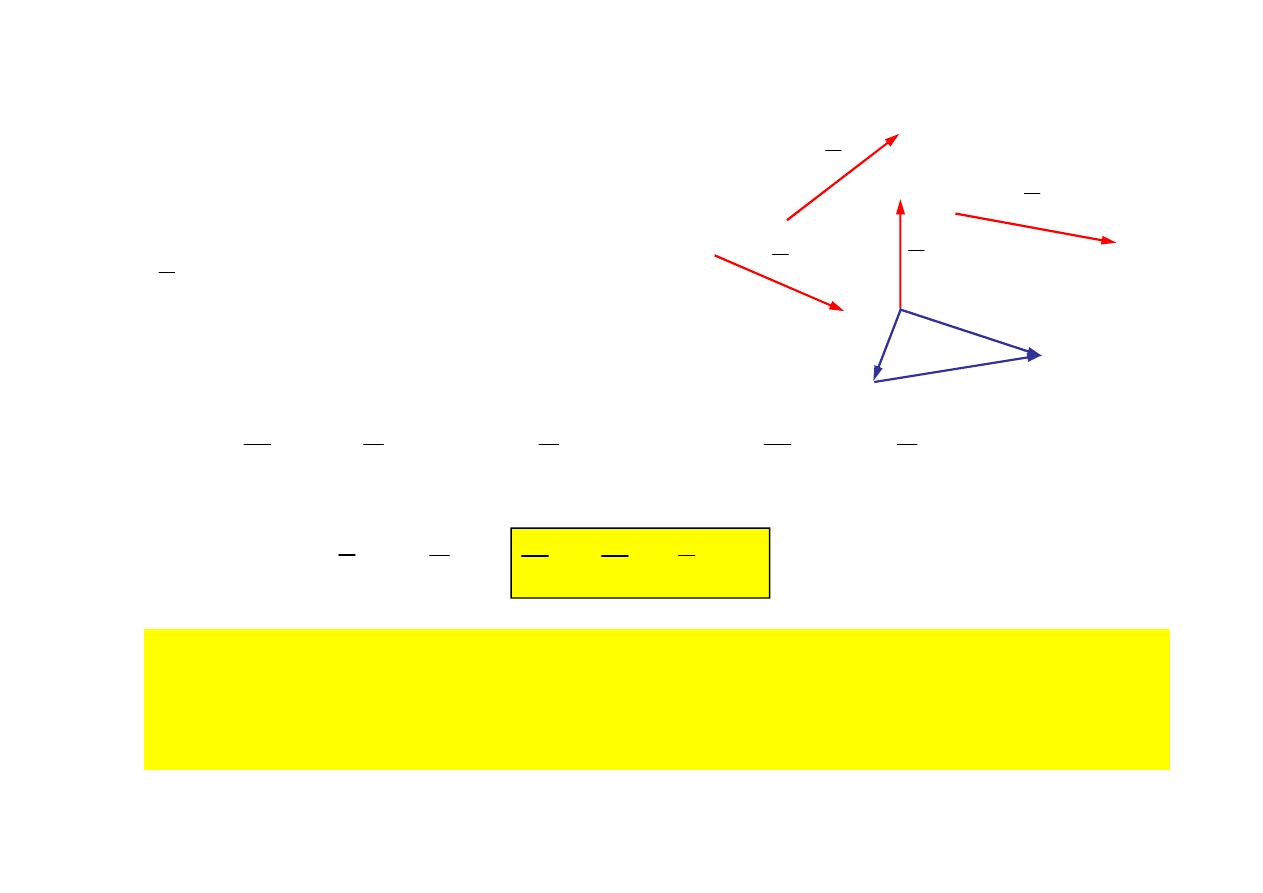
Twierdzenie
Moment siły względem prostej jest równy
rzutowi momentu siły względem dowolnego
punktu prostej na tę prostą.
Dowód pominięto
O
M
___
π
F
l
F
n
n
n
F
F
F
2
π
n
n
n
AO
AO
O
A
2
____
____
_____
'
n
n
n
M
M
O
l
2
Twierdzenie o momencie siły względem prostej
7
Układ sił
Zbiór sił wraz z punktami zaczepienia
n
A
2
F
1
A
i
A
2
A
i
F
1
F
n
F
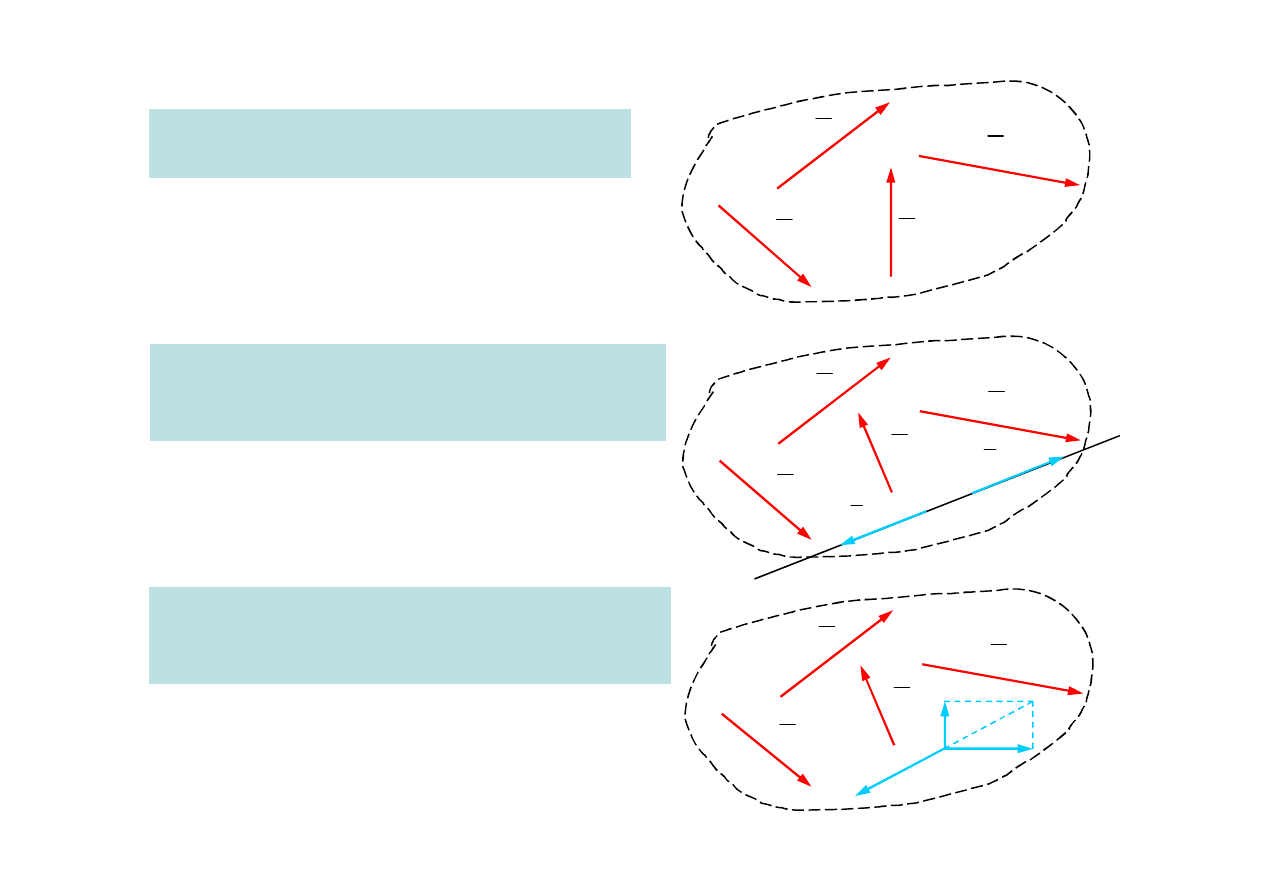
Przekształcenie elementarne I-go rodzaju
Dodanie do układu lub odjęcie dwóch sił
przeciwnych działających wzdłuż prostej
Przekształcenie elementarne II-go rodzaju
Dodanie do układu lub odjęcie układu sił
zbieżnych o sumie równej 0
n
A
2
F
1
A
i
A
2
A
i
F
1
F
n
F
n
A
2
F
1
A
i
A
2
A
i
F
1
F
n
F
Przekształcenia elementarne nie zmieniają
sumy i momentu układu
F
0
F
0
8
1.3. Twierdzenie o zmianie bieguna
____
____
____
____
BR
F
M
BR
B
A
F
R
A
F
M
n
i
i
B
n
i
i
i
n
i
i
i
R
1
1
1
)
(
i
A
n
A
2
F
1
A
i
A
2
A
B
R
i
F
1
F
n
F
Układ
n sił
B
R
i
F
- punkt zaczepienia siły
- siła
- biegun redukcji
- nowy biegun redukcji
n
i
i
df
F
S
1
____
BR
S
M
M
B
R
Twierdzenie
Moment układu sił względem nowego bieguna jest równy sumie momentu tego układu
względem starego bieguna i iloczynu wektorowego sumy układu i wektora łączącego
stary biegun z nowym.
9
Wniosek 1
Jeżeli suma układu jest równa 0 to moment układu jest stały, tzn. nie zależy
od bieguna, względem którego jest liczony
Wnioski z twierdzenia o zmianie bieguna
Z: Suma układu jest równa 0
S 0
T: Moment układu jest stały
M
co n s t
D:
____
S
B
A
B
A
M
M
S
AB
M
M
0
10
Wniosek 2
Jeżeli momenty układu liczone względem trzech niewspółliniowych punktów są
równe to suma układu jest równa 0
Z: Punkty A, B, C są niewspółliniowe
0
____
____
AC
AB
oraz
C
B
A
M
M
M
T: Suma jest równa 0
0
S
D:
0
0
0
S
AC
S
AB
S
AC
S
M
M
AB
S
M
M
A
C
A
B
____
____
____
____
Wniosek 3
Iloczyn skalarny sumy i momentu liczonego względem
dowolnego punktu jest dla danego układu sił wielkoś-
cią stałą i nosi nazwę parametru układu sił
const
S
M
K
O
df
S
M
OA
S
S
S
M
S
OA
S
M
S
M
O
O
O
A
)
(
)
(
____
____
D:
11
1.4. Równoważność układów sił
O równoważności układu wektorów (sił) można mówić wyłącznie w odniesieniu
do rozważanego problemu. W mechanice teoretycznej rozważa się równoważność
układów sił w odniesieniu do problemu redukcji.
punkt
dowolny
)
(
)
(
)
(
)
(
O
O
O
M
M
S
S
df
B
A
B
A
B
A
:
n
i
n
i
A
A
A
A
F
F
F
F
...
...
...
...
2
1
2
1
A
m
i
m
i
B
B
B
B
R
R
R
R
...
...
...
...
2
1
2
1
B
Dwa układy
i
są równoważne, jeżeli można, wykonując na jednym z nich skończoną liczbę
przekształceń I-go i II-go rodzaju, przekształcić jeden układ w drugi.
Definicja równoważności układów sił
12
Równoważne układy sił
Równoważne układy sił
Przekształcenie elementarne
I
–go rodzaju
Przekształcenie elementarne
II
–go rodzaju
13
Twierdzenia o równoważności układów sił
Twierdzenie 1
Dwa układy są równoważne, gdy mają równe sumy i równe momenty liczone względem
jednego (ustalonego) punktu.
Z:
oraz
)
)
B
A
(
(
O
O
M
M
T:
D:
)
)
B
A
(
(
S
S
B
A
)
(
)
(
OO'
)
(
)
(
)
(
OO'
)
(
)
(
)
(
O'
O'
O
O'
O
O'
B
A
B
B
B
A
A
A
M
M
S
M
M
S
M
M
____
____
Dowód
14
Twierdzenie 2
Dwa układy są równoważne, gdy mają (odpowiednio) równe momenty liczone
względem trzech niewspółliniowych punktów.
oraz
)
)
B
A
(
(
O
O
M
M
T:
D:
)
)
B
A
(
(
S
S
B
A
____
____
____
____
OO"
)
(
)
(
)
(
OO"
)
(
)
(
)
(
OO'
)
(
)
(
)
(
OO'
)
(
)
(
)
(
O
O"
O
O"
O
O'
O
O'
B
B
B
A
A
A
B
B
B
A
A
A
S
M
M
S
M
M
S
M
M
S
M
M
Dowód
Z: Punkty O, O’, O” są niewspółliniowe
)
)
B
A
(
(
O'
O'
M
M
)
)
B
A
(
(
O"
O"
M
M
czyli
0
)
(
-
)
(
OO"
do
równoległy
jest
nie
OO'
0
OO"
)
(
-
)
(
0
OO'
)
(
-
)
(
B
A
B
A
B
A
S
S
S
S
S
S
____
____
____
____
15
1.5. Zerowy układ sił i para sił
Zerowy układ sił
Układ sił, którego suma i moment
liczony względem dowolnego punktu
jest wektorem zerowym.
Para sił
Układ dwóch niezerowych sił przeciw-
nych nie leżących na jednej prostej.
0
0
M
S
F
F
F
G
)
(
G
F
ne
prawoskręt
:
zwrot
:
wartość
:
kierunek
O
O
O
B
O
M
AB
F
d
F
AB
F
M
M
AB
F
M
M
,
,
|
|
α
sin
|
|
|
|
|
|
Π
:
____
____
____
F
A
B
F
O
M
0
d
Π
α

Część 2
REDUKCJA UKŁADU SIŁ
17
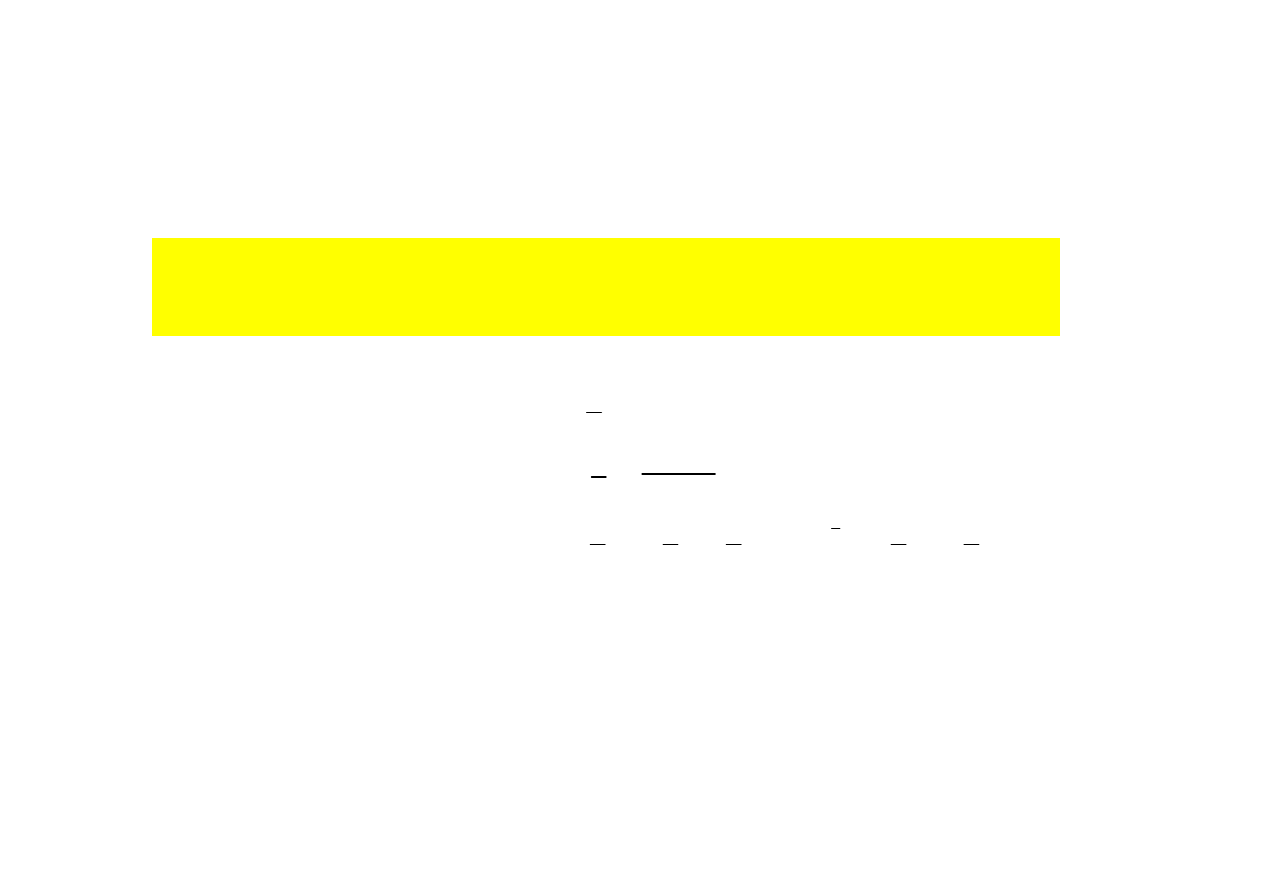
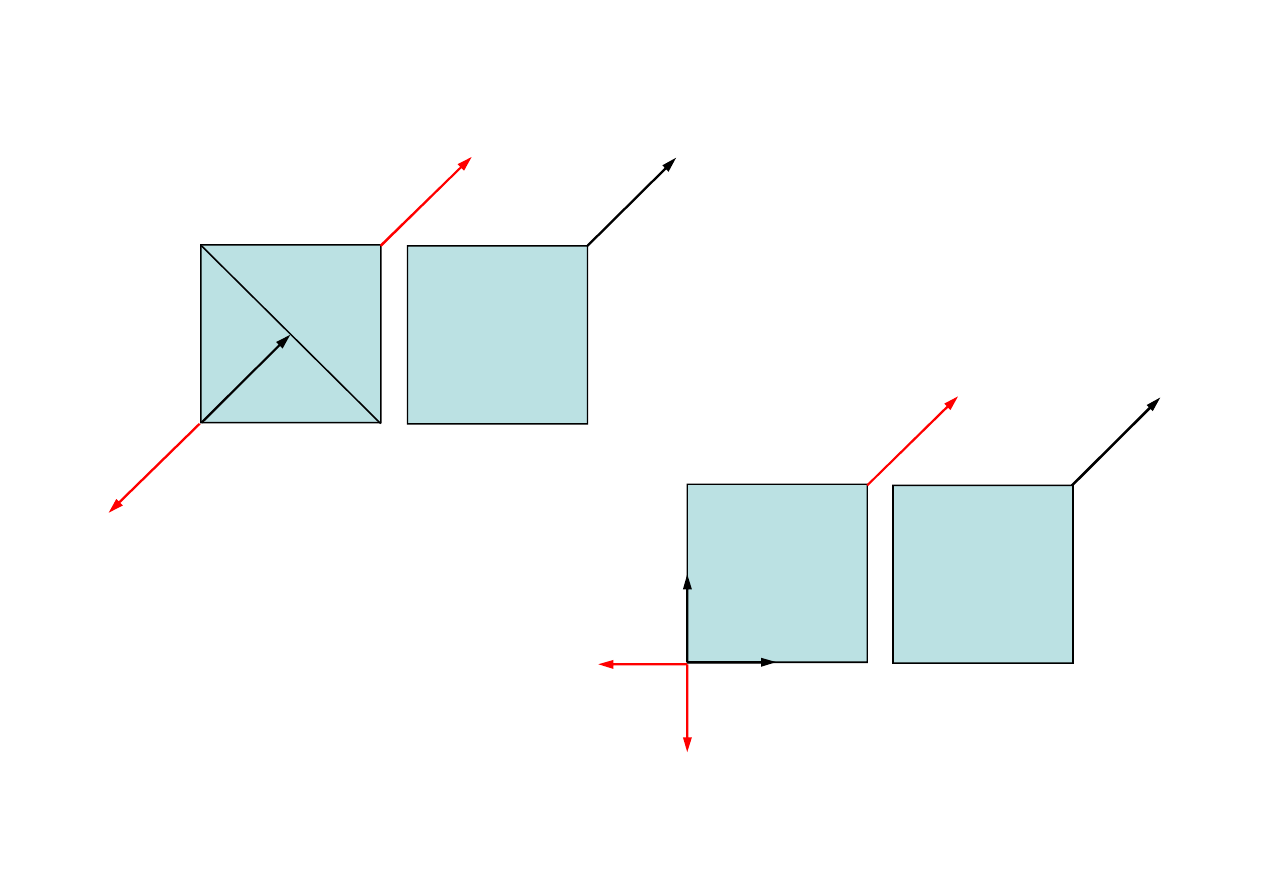
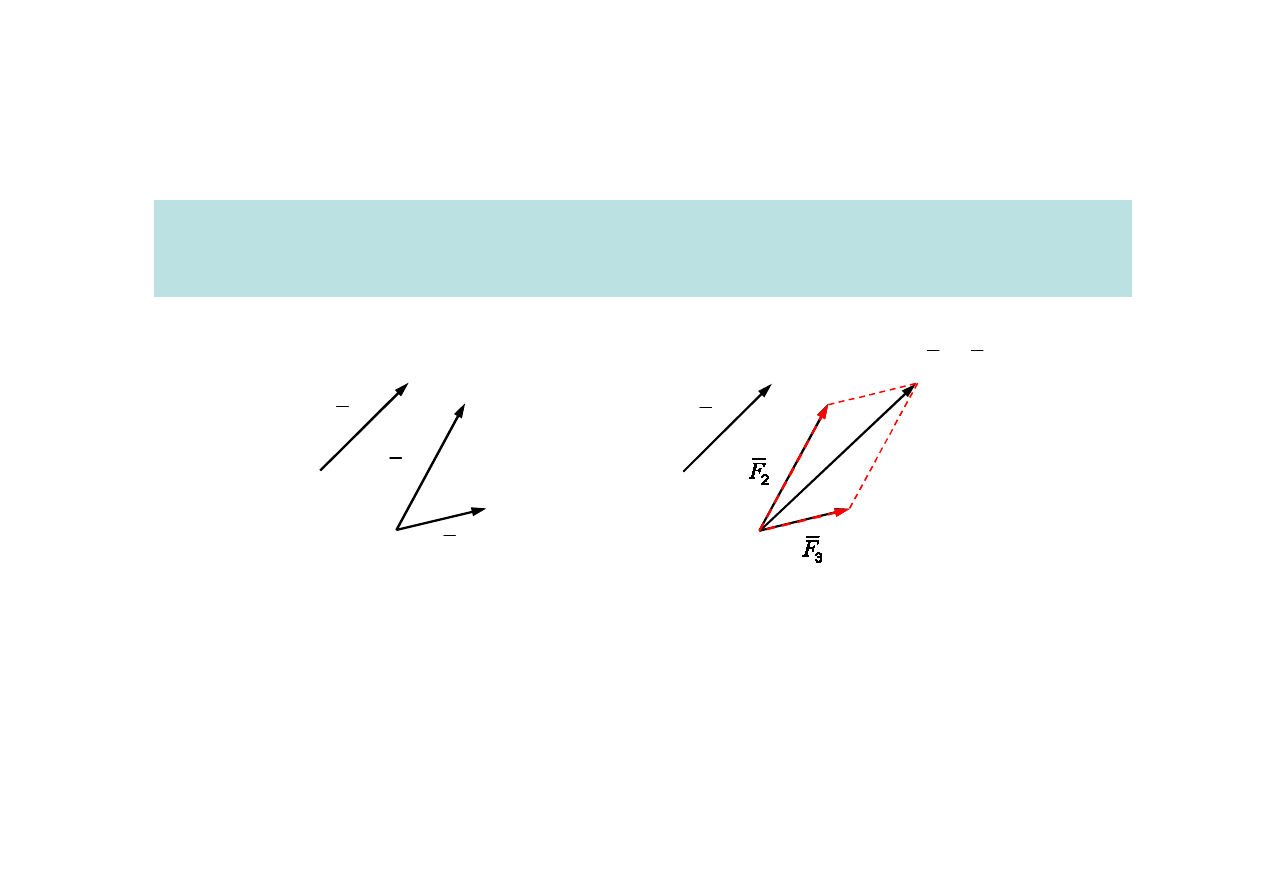
2.1. Redukcja układu sił w punkcie
Redukcja układ sił
Przekształcenie polegające na zastąpieniu danego układu sił równoważnym
układem prostszym, tj. złożonym z mniejszej liczby sił
F
1
F
2
F
3
F
1
F
F
2
3
F
2
F
3
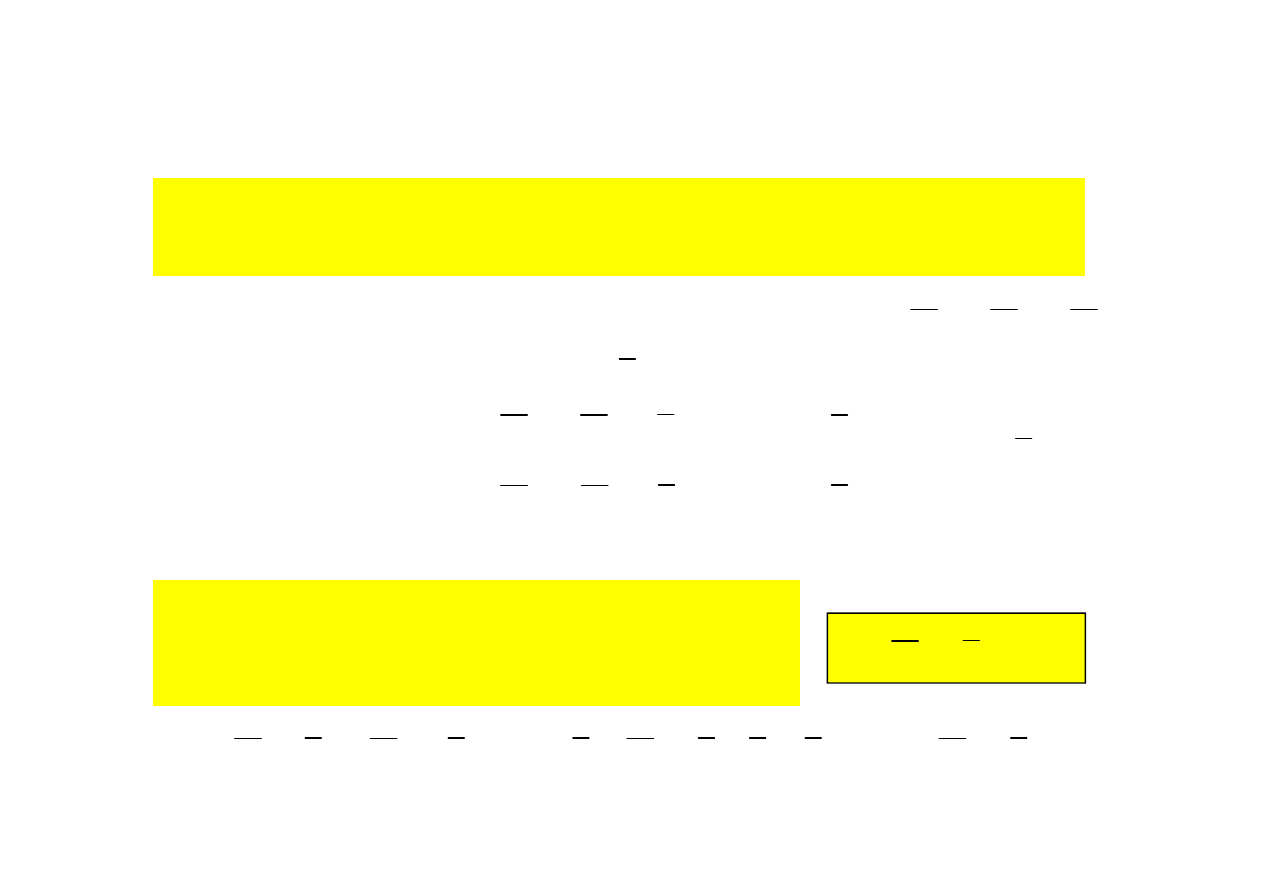
Układ trzech sił
Układ równoważny,
zredukowany do dwóch sił
18
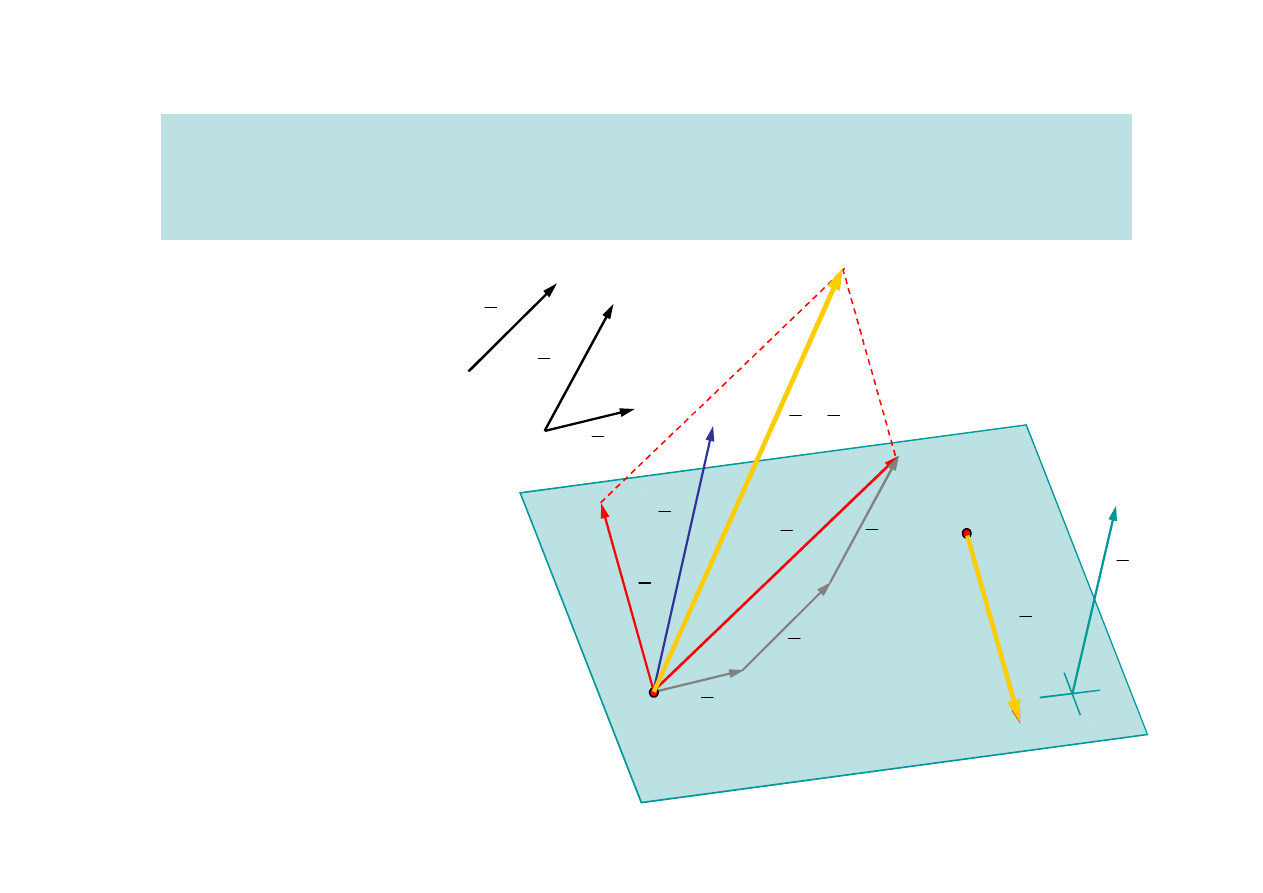
n
π
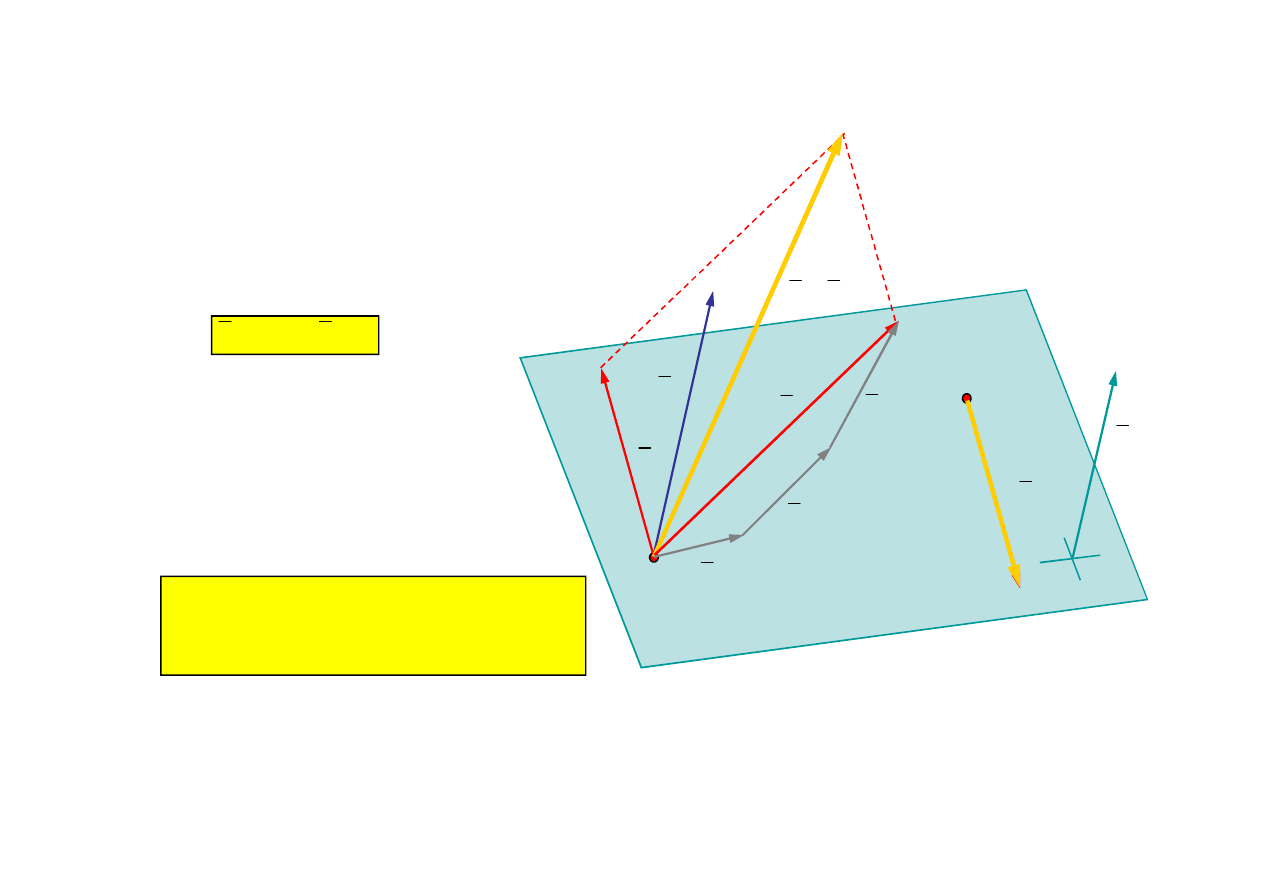
Redukcja w punkcie (w biegunie redukcji)
Zastąpienie danego układu układem równoważnym, złożonym z wektora równego
sumie układu i pary sił o momencie równym momentowi układu sił względem
bieguna redukcji
Tok postępowania:
F
1
F
2
F
3
S
F
3
F
1
F
2
O
F
F
G
O
M
S
F
1. Wybór bieguna redukcji O
2. Wyznaczenie
wektora
zaczepionego w punkcie O
równego sumie układu
3. Wyznaczenie
momentu układu
sił względem bieguna O
4. Wyznaczenie
pary sił o momencie
równym momentowi układu względem
bieguna redukcji, z których jedna jest
zaczepiona w biegunie redukcji
5. Redukcja układu do dwóch sił skośnych
poprzez dodanie sił zaczepionych w O
19
n
π
S
F
3
F
1
F
2
O
F
F
G
O
M
S
F
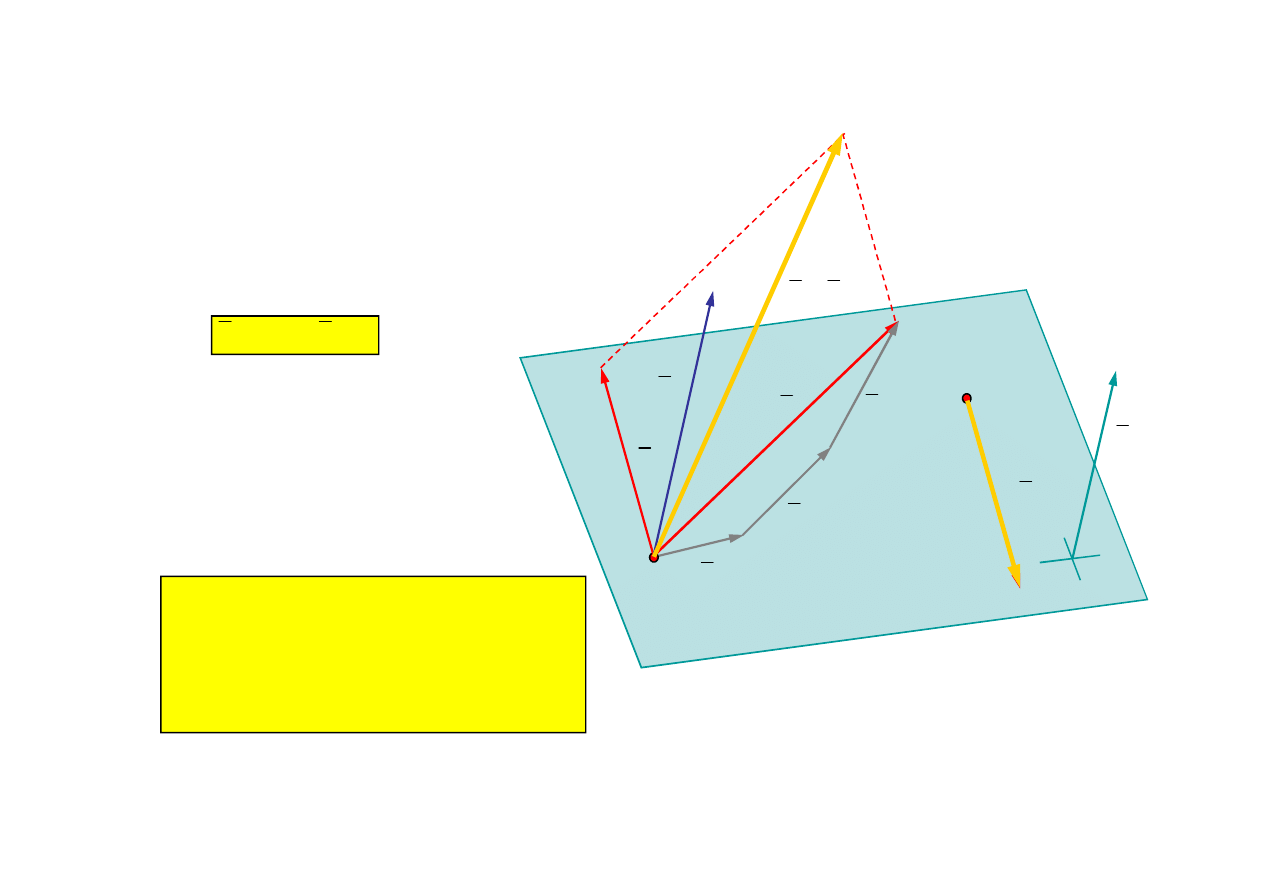
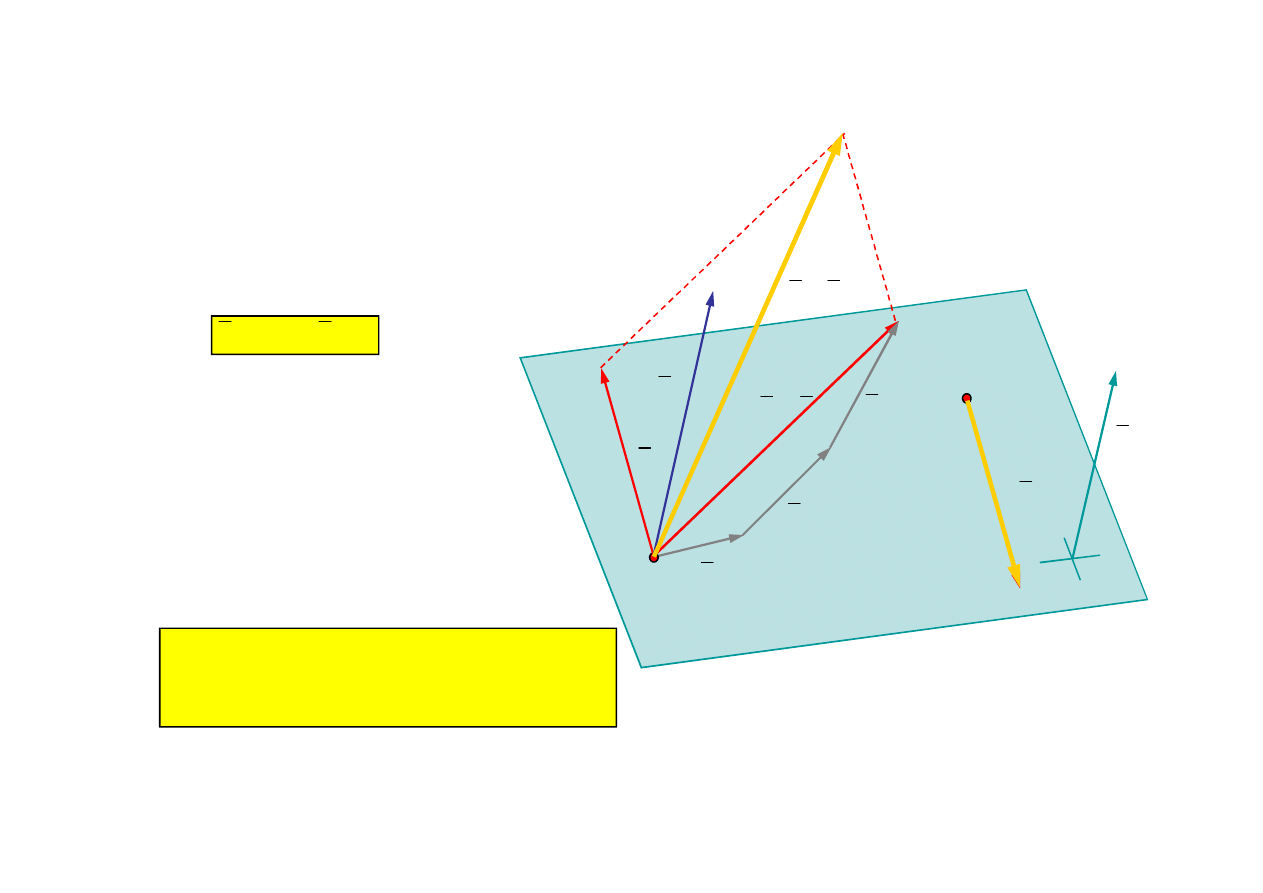
Cztery przypadki redukcji w punkcie
Przypadek 1 (ogólny):
S
M
0
0
Układ sił redukuje się do wektora
b = S zaczepionego w punkcie
redukcji oraz pary sił o momencie
M
O
równym momentowi układu sił
względem punktu redukcji
20
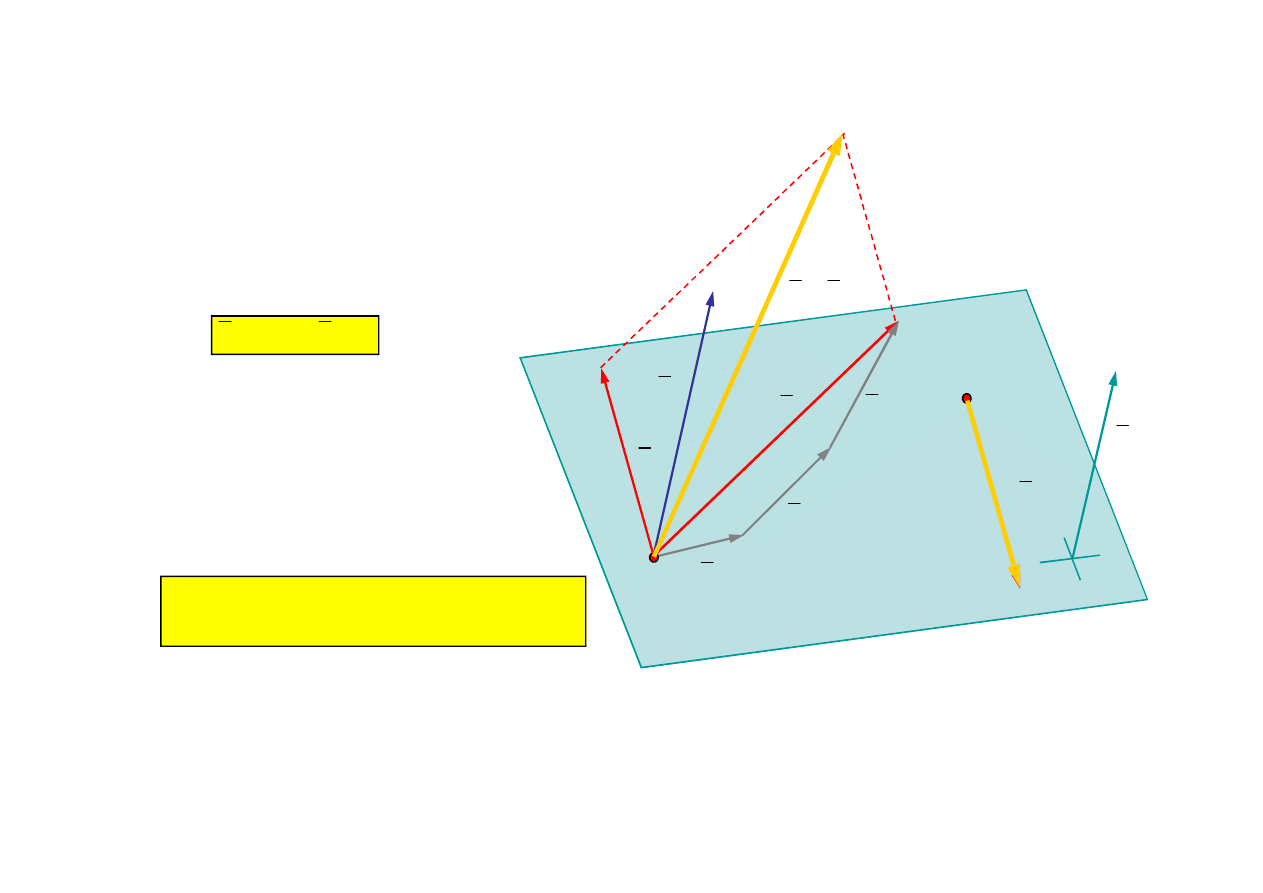
Cztery przypadki redukcji w punkcie - cd
Przypadek 2:
S
M
0
0
Układ sił redukuje się do wektora
b = S zaczepionego w punkcie
redukcji
n
π
O
F
F
G
O
M
S
F
S
F
3
F
1
F
2
21
Cztery przypadki redukcji w punkcie - cd
Przypadek 3:
S
M
0
0
Układ sił redukuje się do pary sił
o momencie M
O
równym momentowi
układu sił względem punktu redukcji
n
π
b
S
F
3
F
1
F
2
O
F
F
G
O
M
S
F
22
Cztery przypadki redukcji w punkcie - cd
Przypadek 4:
S
M
0
0
Układ sił redukuje się do układu
zerowego
n
π
S
F
3
F
1
F
2
O
F
F
G
O
M
S
F
23
2.2. Redukcja układu sił do najprostszej postaci
Redukcja układ sił do najprostszej postaci
Przekształcenie polegające na zastąpieniu danego układu sił układem
równoważnym złożonym z najmniejszej liczby sił
Redukcja w punkcie a redukcja do najprostszej postaci
W problemie redukcji w punkcie biegun redukcji jest znany (wybrany lub zadany)
natomiast w problemie redukcji do najprostszej postaci poszukuje się położenia
takich punktów, w których układ sił redukuje się do najprostszej postaci
24
Przypadek 1:
Jeżeli w wybranym lub zadanym biegunie redukcji układ sił redukuje się do układu
zerowego to układ zerowy jest najprostszym zredukowanym układem tego układu sił
O
S
M
O
0
0
wybrany punkt
Układ sił w każdym punkcie
redukuje się do
układu zerowego
Szczególne przypadki redukcji do najprostszej postaci
Przypadek 2:
Jeżeli w wybranym lub zadanym biegunie redukcji układ sił redukuje się do pary sił
o momencie równym momentowi układu sił względem bieguna redukcji to para sił jest
najprostszym zredukowanym układem tego układu sił
O
S
M
O
0
0
wybrany punkt
Układ sił w każdym punkcie
redukuje się do
pary sił
25
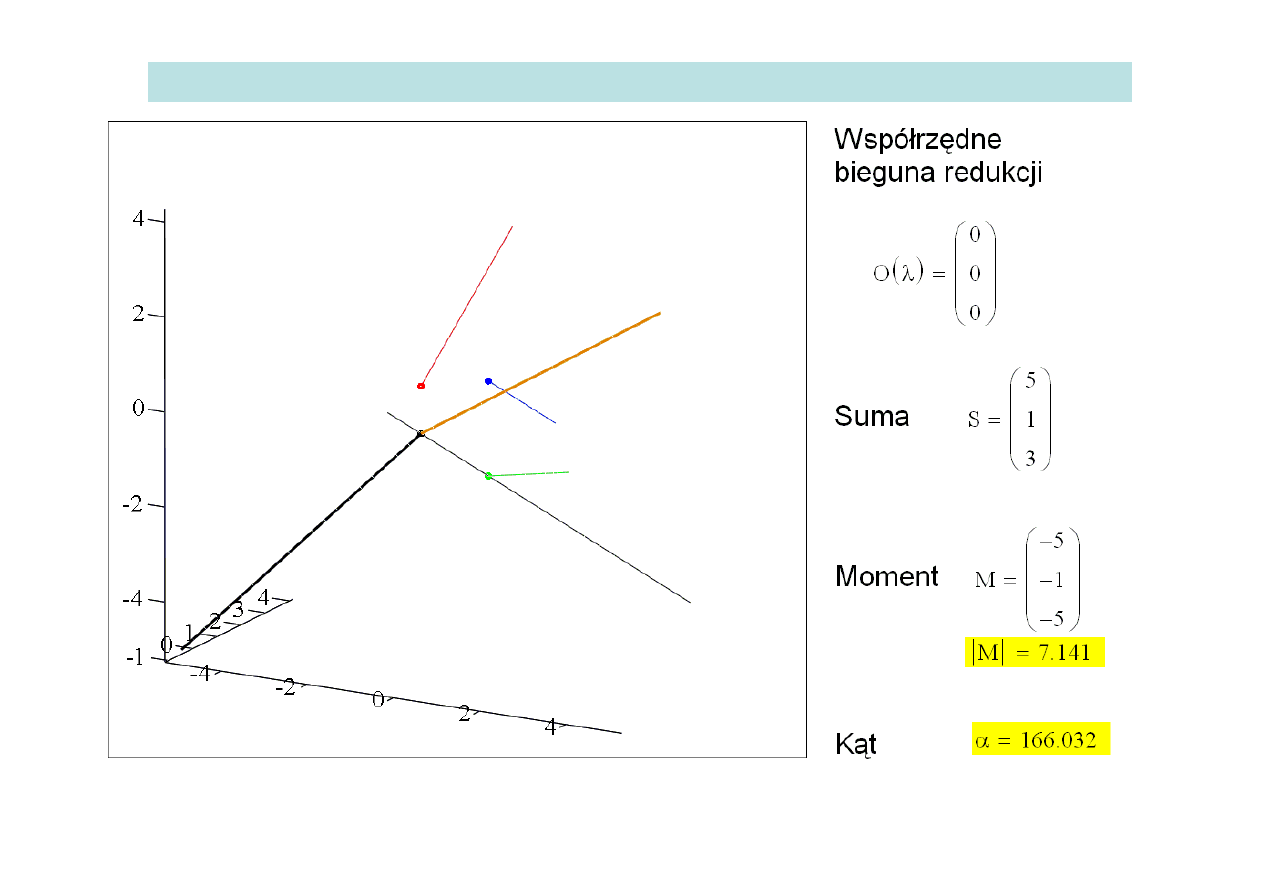
Przypadek ogólny: parametr układu jest różny od 0 – przykład:
Dany jest układ trzech sił:
a
b
c
A
B
C
1 2 3
1 1
1
3
2 1
0 0 1
1 1 1
1 1
1
S
1 2 3
1 1
1
3
2 1
5 1 3
O
M
1 2 3
1 1
1
3
2 1
5
1
5
0 0
1
1
1
1
1
1 1
O
K
S M
5 1 3
5
1
5
41
Suma układu:
Moment układu
względem punktu
(0, 0, 0):
Parametr układu:
Zadanie:
Jak zmienia się równoważny układ zredukowany w biegunie redukcji poruszającym
się wzdłuż wybranej prostej.
Równanie parametryczne
przypadkowo wybranej prostej:
x
λ , y
λ , z
λ
26
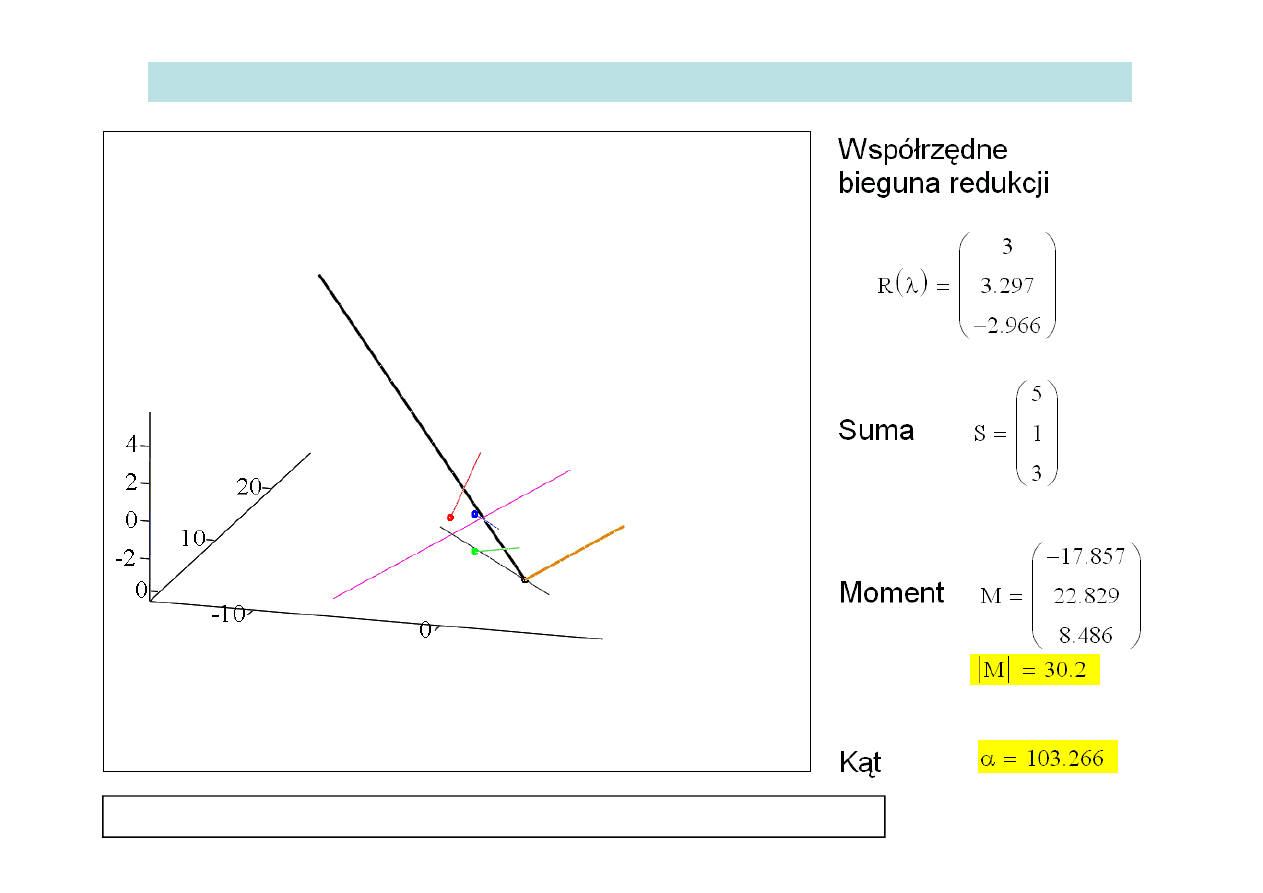
Rozwiązanie zadania przy l zmieniającym się w sposób ciągły od 0 do 3
27
Przypadek ogólny: parametr układu jest różny od 0 – rozważania teoretyczne
O
O
O
K
S M
S
M
cos
S ,M
const
O
O
K
M
S cos
S ,M
O
O
M
min
S ,M
π
0
O
O
O
O
S
M
M
S
S ,M
K
M
S
0:
O
K
M
S
S
2
O
O
O
O
S
M
M
S
S ,M
π
K
M
S
:
O
K
M
S
S
2
Punkty, w których układ sił o parametrze K różnym od 0 redukuje się do sumy i pary
sił o momencie równoległym do sumy leżą na prostej zwanej
osią środkową
Układ sił w punktach osi środkowej redukuje się do
skrętnika
28
Przypadek ogólny: parametr układu jest różny od 0 – przykład:
Zadanie:
Wyznaczyć oś środkową układu sił z poprzedniego przykładu a następnie zilustrować
zmiany równoważnego układu zredukowanego gdy punkt redukcji porusza się po
prostej przecinającej się z osią środkową
W osi środkowej układ redukuje się do sumy i pary sił o momencie
równoległym do sumy i osiąga minimalną wartość (skrętnik):
R
K
M
S
S
2
Przyrównując odpowiednie współrzędne wyznacza się równanie krawędziowe lub
parametryczne osi środkowej
z
y
d
, gdzie d
x
z
d
3
5 1
0
41
3
5
1
0
35
x
λ
y
λ
d
z
λ
d
1
26
1
5
15
3
1
1
5
5
Wykorzystując twierdzenie o zmianie bieguna formułuje się wektorowe równanie
osi środkowej:
R
O
K
M
S
M
S
OR ,
R x, y, z
S
2
- punkt leżący na osi środkowej
29
Rozwiązanie zadania przy l zmieniającym się w sposób ciągły od 3 do 0
Uwaga: l 0 odpowiada punktowi leżącemu na osi środkowej
30
Przypadek 3:
Suma układu jest różna od zera a parametr jest równy 0
Trzeci szczególny przypadek redukcji do najprostszej postaci
Definicja wypadkowej:
Wypadkowa to układ sił równoważny danemu złożony z jednego wektora
Układ sił w każdym punkcie osi środkowej
redukuje się do jednego wektora
- wypadkowej
O
K
M
S
S
2
0
S
K
0
0
(moment układu jest zawsze prostopadły do sumy)
Wypadkowa działa wzdłuż ściśle określonej prostej (prosta działania wypadkowej,
oś środkowa) o tej własności, że moment układu względem punktów tej prostej jest
równy 0
Wyszukiwarka
Podobne podstrony:
MT st w 06 [tryb zgodności]
MT st w 08 [tryb zgodności]
MT st w 05 [tryb zgodności]
MT st w 07 [tryb zgodności]
MT st w 02a [tryb zgodno┼Ťci]
MT st w 02 [tryb zgodno┼Ťci]
MT st w 10 [tryb zgodności]
MT st w 06 [tryb zgodności]
MT st w 041 [tryb zgodno┼Ťci]
MT st w 10 [tryb zgodno┼Ťci]
MT st w 11 [tryb zgodno┼Ťci]
MT st w 03
1 ST PiS [tryb zgodnosci]
MT st w 03
Chemia Jadrowa 03 [tryb zgodnosci]
więcej podobnych podstron