
Wykład 15
MECHANIKA TEORETYCZNA
Studia stacjonarne I stopnia – rok akademicki 2014/15
Autor:
Henryk Laskowski
Katedra Podstaw Mechaniki Ośrodków Ciągłych
Instytut Mechaniki Budowli
Wydział Inżynierii Lądowej
Dynamika układu o jednym stopniu swobody
Drgania tłumione harmonicznie wymuszone
Podsumowanie działu

Część 1
Drgania tłumione harmonicznie wymuszone

3
( )
( )
( )
c
s
mq t
cq t
kq t
P cosλt P sinλt
+
+
=
+
&&
&
1.1. Równanie ruchu
Ogólne równanie ruchu układu materialnego o jednym stopniu swobody
poddanego działaniu siły harmonicznej
Rozwiązaniem równania niejednorodnego, liniowego, drugiego rzędu o stałych
współczynnikach jest suma całki ogólnej równania jednorodnego
q
j
(t)
i całki
szczególnej równania niejednorodnego
q
n
(t)
.
( )
( )
( )
j
u
q t
q t
q t
=
+
Rozwiązanie równania jednorodnego:
( )
(
)
γωt
j
s
d
c
d
q t
e
A sinω t A cosω t
-
=
+
s
c
A , A
- stałe całkowania wyznaczane z warunków początkowych
lub brzegowych wprowadzonych do rozwiązania ogólnego
równania niejednorodnego
4
Całkę szczególną równania niejednorodnego przyjmuje się w
postaci:
- prędkość
- przyśpieszenie
(
)
(
)
(
)
2
2
s
c
s
c
s
c
c
s
m aλ sinλt a λ cosλt
c a λcosλt a λsinλt
k a sinλt a cosλt
P cosλt P sinλt
-
-
+
-
+
+
=
+
(
)
(
)
2
2
c
s
c
c
s
s
k mλ a
cλa
P
cλa
k mλ a
P
-
+
=
-
+ -
=
(
)
(
)
(
)
(
)
2
2
2
2
2
2 2
2
2 2
c
s
s
c
c
s
k mλ P cλP
k mλ P cλP
a
, a
k mλ
c λ
k mλ
c λ
-
-
-
+
=
=
-
+
-
+
Jeśli powyższe równanie musi być
spełnione w każdej chwili czasu to:
(pogrupowano wyrazy przy sinus i
cosinus)
a stąd:
t
a
t
a
t
q
c
s
n
cos
sin
t
a
t
a
t
q
c
s
n
sin
cos
t
a
t
a
t
q
c
s
n
cos
sin
2
2
5
Rozwiązanie równania niejednorodnego
( )
(
)
γωt
s
d
c
d
s
c
q t
e
A sinω t A cosω t
a sinλt a cosλt
-
=
+
+
+
( )
(
)
(
)
γωt
γωt
s
d
c
d
s d
d
c d
d
s
c
q tγωe
A sinω t A cosω t
e
Aω cosω t A ω sinω t
aλcosλt a λsinλt
-
-
=-
+
+
-
+
+
-
&
0
c
s d
s
vγωA Aω
a λ
=-
+
+
0
c
c
q
A a
= +
( )
0
0
q t
q
=
( )
0
0
q t
v
=
&
0
0
t =
0
c
c
A
q a
= -
(
)
0
0
c
s
s
d
vγω q a
a λ
A
ω
+
-
-
=
Wyznaczenie stałych całkowania
A
s
i
A
c
6
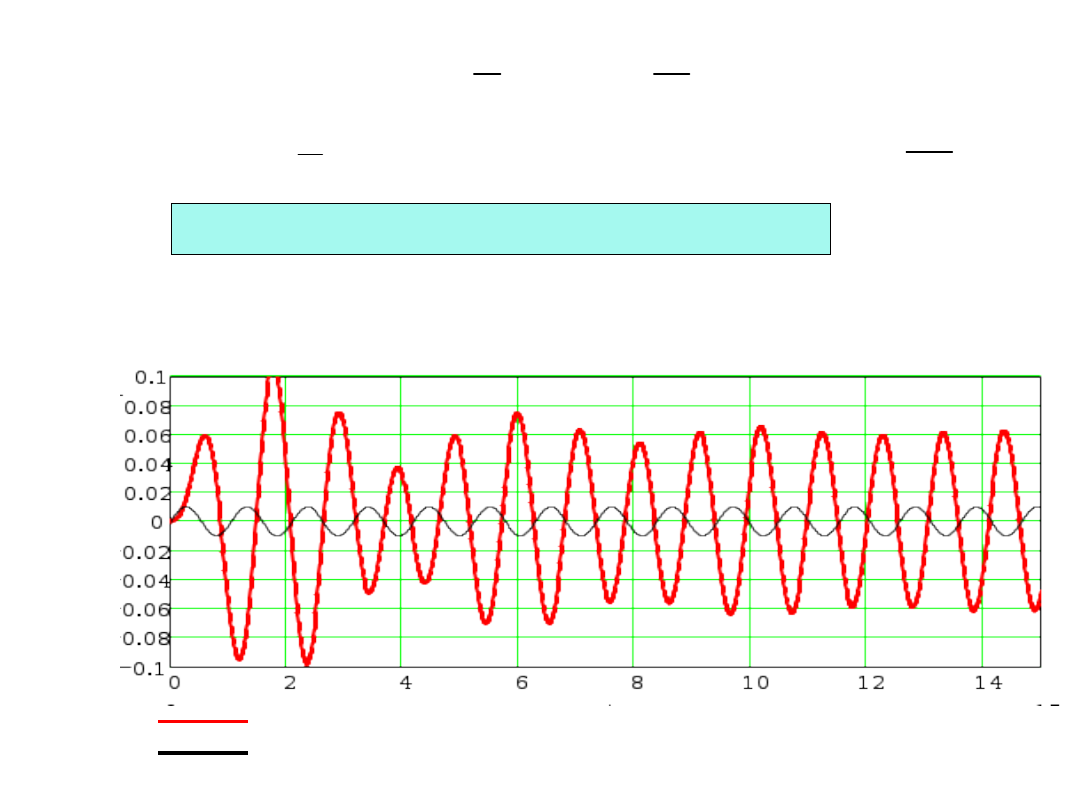
Czas
[s]
P
o
ło
że
n
ie
[m
]
S
iła
w
y
m
u
sz
a
ją
ca
[N
/1
0
0
]
położenie
siła wymuszająca
1
m
kg
=
20
N
k
m
=
Przykład:
0 6
Ns
c
,
m
=
0 067
γ
,
=
0
0
q
m
=
0
0
m
v
s
=
( )
s
F t
P sinλt
=
( )
s
F t
P sinλt
=
1
s
P
N
=
6
s
rad
λ
s
=
( )
(
)
γωt
s
d
c
d
s
c
q t
e
A sinω t A cosω t
a sinλt a cosλt
-
=
+
+
+
0059
0013
0081
0013
s
c
s
c
a
.
m, a
.
m, A
.
m, A
.
m
=-
=-
=
=
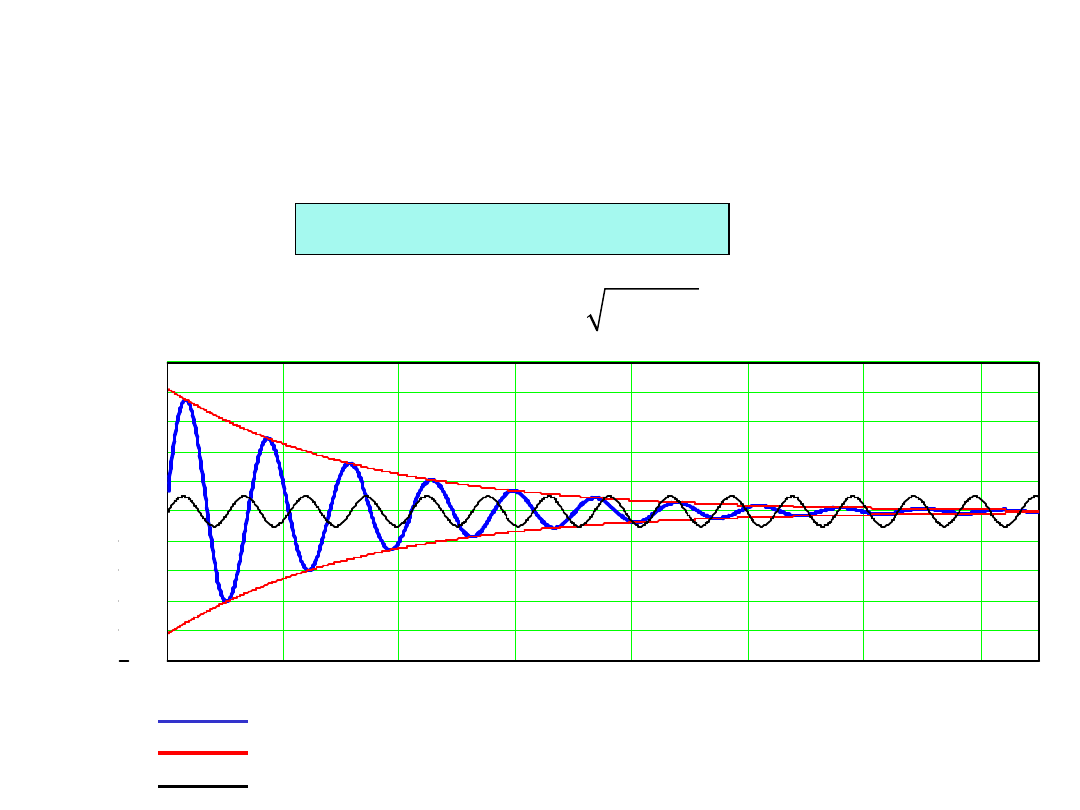
7
Czas
[s]
funkcja
wykładnicza
( )
γωt
m
q t
Ae
-
=
( )
(
)
γωt
j
s
d
c
d
q t
e
A sinω t A cosω t
-
=
+
2
2
0081
0013
0 082
s
c
s
c
A
.
m, A
.
m, A
A
A
,
m
=
=
=
+
=
0
2
4
6
8
10
12
14
0.1
0.08
0.06
0.04
0.02
0
0.02
0.04
0.06
0.08
0.1
0.1
0.1
q j t
( )
t
( )
t
( )
F t
( )
100
15
0
t
P
o
ło
że
n
ie
[m
]
S
iła
w
y
m
u
sz
a
ją
ca
[N
/1
0
0
]
siła wymuszająca
( )
s
F t
P sinλt
=
położenie
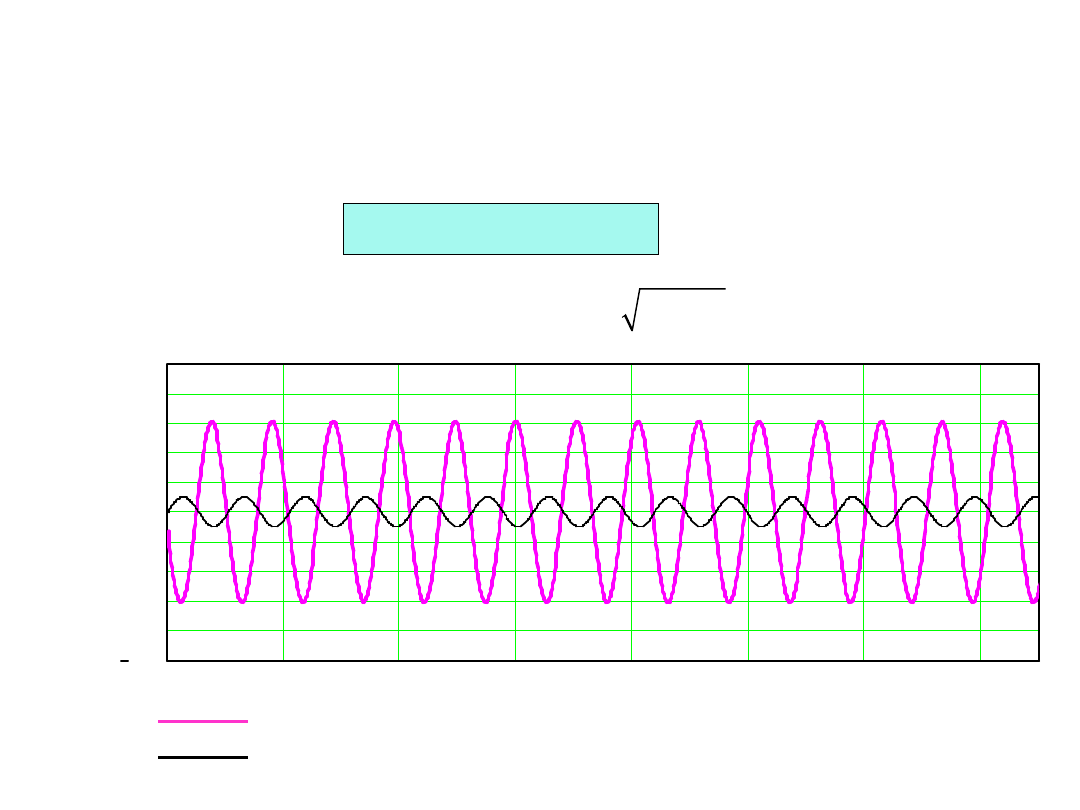
8
Czas
[s]
P
o
ło
że
n
ie
[m
]
S
iła
w
y
m
u
sz
a
ją
ca
[N
/1
0
0
]
siła wymuszająca
( )
s
F t
P sinλt
=
położenie
( )
u
s
c
q t
a sinλt a cosλt
=
+
2
2
0059
0013
0061
s
c
s
c
a
.
m, a
.
m, a
a
a
.
m
=-
=-
=
+
=
0
2
4
6
8
10
12
14
0.1
0.08
0.06
0.04
0.02
0
0.02
0.04
0.06
0.08
0.1
0.1
0.1
q u t
( )
F t
( )
100
15
0
t
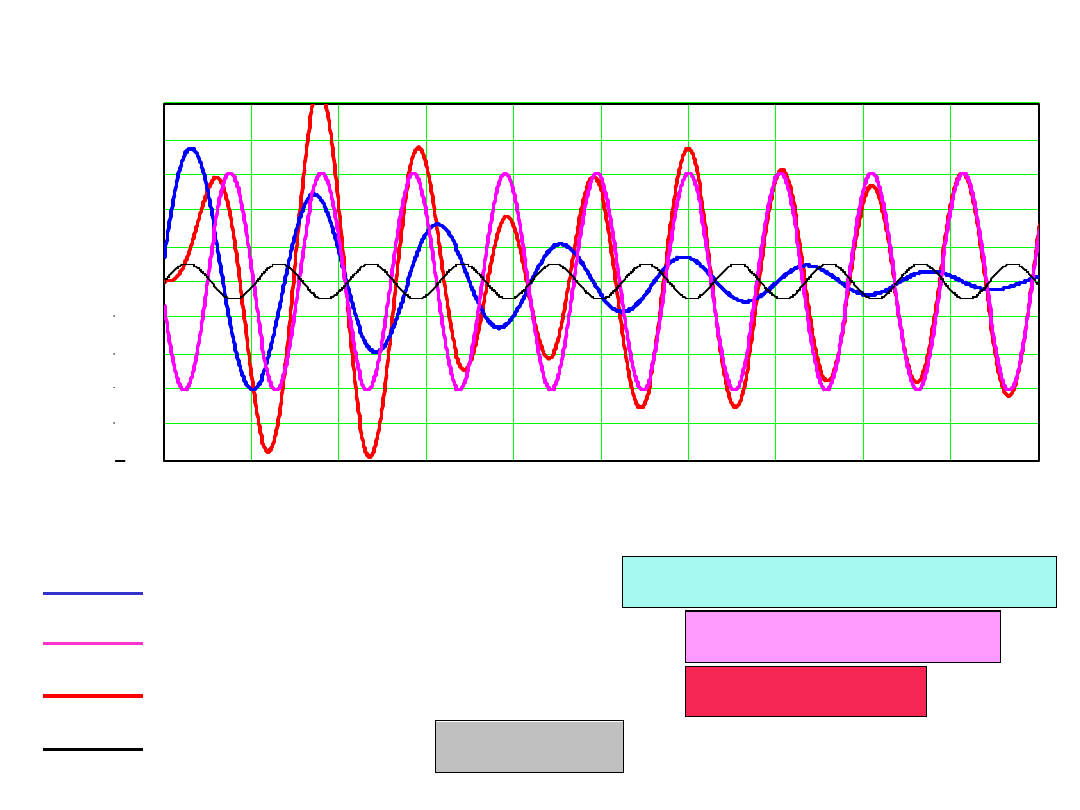
9
Czas
[s]
całka szczególna równania
niejednorodnego
P
o
ło
że
n
ie
[m
]
S
iła
w
y
m
u
sz
a
ją
ca
[N
/1
0
0
]
siła wymuszająca
( )
s
F t
P sinλt
=
całka ogólna równania
jednorodnego
0
1
2
3
4
5
6
7
8
9
10
0.1
0.08
0.06
0.04
0.02
0
0.02
0.04
0.06
0.08
0.1
0.1
0.1
q t
( )
qj t
( )
qu t
( )
F t
( )
100
10
0
t
całka ogólna równania niejednorodnego
( )
(
)
γωt
j
s
d
c
d
q t
e
A sinω t A cosω t
-
=
+
( )
u
s
c
q t
a sinλt a cosλt
=
+
( )
( )
( )
j
u
q t
q t
q t
=
+
10
Alternatywna postać rozwiązania
( )
s
c
P t
P sinλt P cosλt
=
+
( )
(
)
0
P t
P sinλt θ
=
-
2
2
0
s
c
P
P
P
=
+
c
s
P
tgθ
P
=-
0
s
P
P cosθ
=
0
c
P
P sinθ
=-
( )
(
)
(
)
u
s
c
q t
a sinλt θ
a cos λt θ
=
-
+
-
%
%
Rozwiązanie szczególne równania niejednorodnego
(opis ruchu ustalonego)
(
)
(
)
(
)
2
0
0
2
2
2
2 2
2
2 2
c
s
k mλ P
cλP
a
, a
k mλ
c λ
k mλ
c λ
-
-
=
=
-
+
-
+
%
%
11
s
a
a cosφ
=
0
%
( )
(
)
(
)
u
s
c
q t
a sinλt θ
a cos λt θ
=
-
+
-
%
%
c
a
a sinφ
=-
0
%
( )
(
)
0
u
q t
a sinλt θ φ
=
- -
(
)
2
2
0
0
2
2
2 2
s
c
P
k
a
a
a
k
k mλ
c λ
=
+
=
-
+
% %
2
c
s
a
λc
tgφ
a
k mλ
=-
=
-
%
%
0
st
P
a
k
=
2
kr
c
mω
=
kr
cγc
=
(
)
2
0
2
2
2
2 2
2
4
st
a
ω
η
a
ω
λ
λγ ω
=
=
-
+
2
2
2λγω
tgφ
ω
λ
=
-
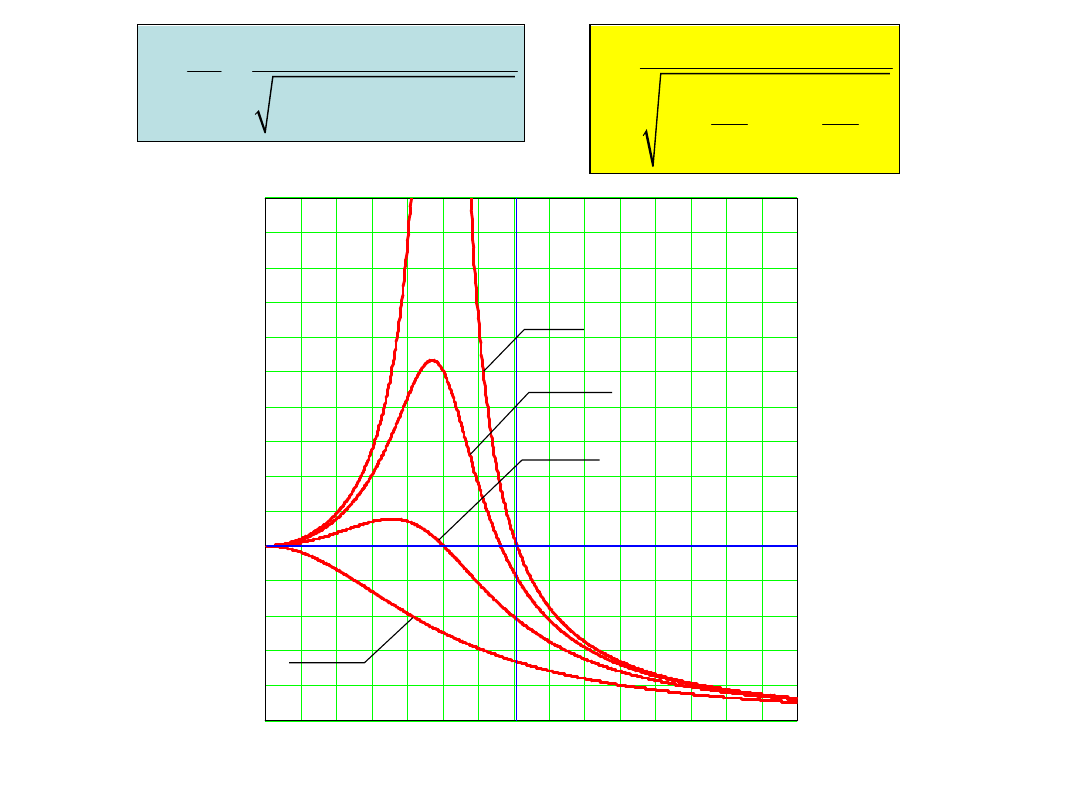
Współczynnik
dynamiczny
(współczynnik zwielokrot-
nienia drgań)
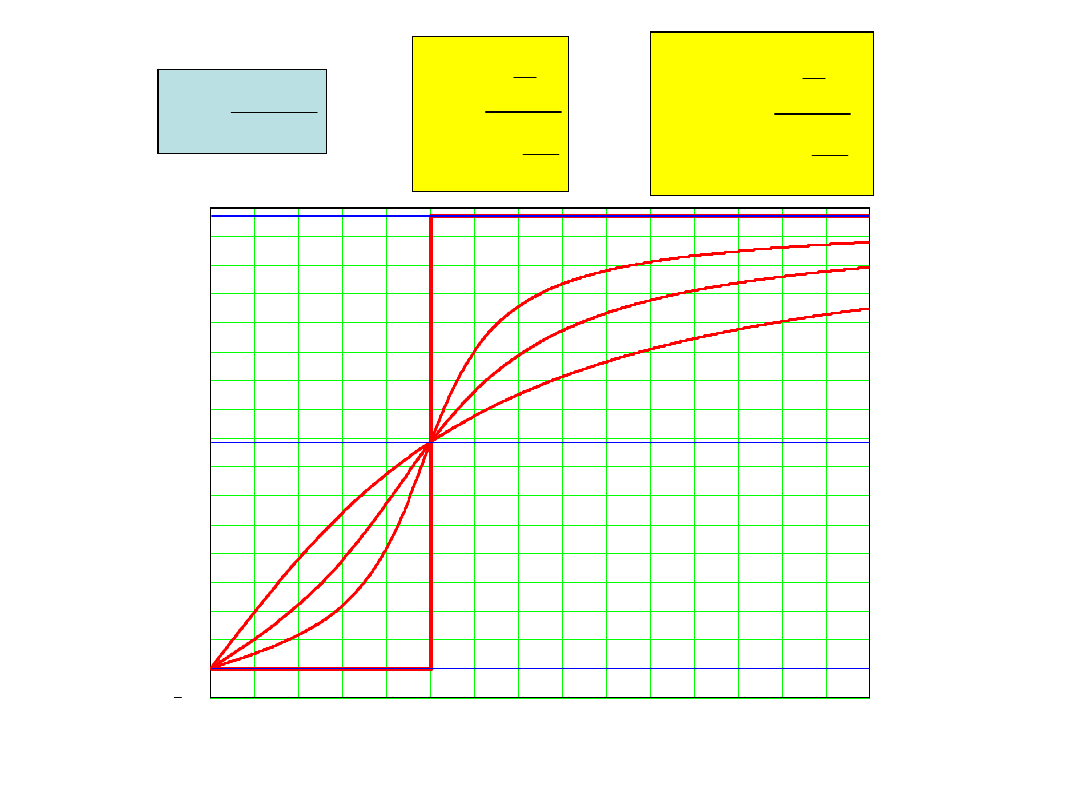
Kąt fazowy
12
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2 2.2 2.4 2.6 2.8 3
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
2.2
2.4
2.6
2.8
3
3
0
e0p
( )
e25p
( )
e50p
( )
e100p
( )
lx p
( )
p
3
0
p p
p
p
p
ly p
( )
(
)
2
0
2
2
2
2 2
2
4
st
a
ω
η
a
ω
λ
λγ ω
=
=
-
+
2
2
2
2
2
2
1
1
4
η
λ
λ
γ
ω
ω
=
�
�
-
+
�
�
�
�
0
γ=
025
γ
.
=
05
γ
.
=
10
γ
.
=
(
)
η λ/ ω
λ/ ω
13
0
0.2 0.4 0.6 0.8
1
1.2 1.4 1.6 1.8
2
2.2 2.4 2.6 2.8
3
0.2
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
2.2
2.4
2.6
2.8
3
3.2
0.2
f0 p
( )
f25p
( )
f50p
( )
f100p
( )
l0 p
( )
l1 p
( )
l2 p
( )
3
0
p
2
2
2λγω
tgφ
ω
λ
=
-
2
2
2
1
λ
γ
ω
tgφ
λ
ω
=
-
2
2
2
1
λ
γ
ω
φ atan
λ
ω
�
�
�
�
�
�
=
�
�
-
�
�
�
�
(
)
φ λ/ ω
λ/ ω
0
γ=
025
γ
.
=
05
γ
.
=
10
γ
.
=
14
CreateSpace
0 200
(
)
CreateSpace
Lx 200
(
)
CreateSpace
Lz 100
(
)
CreateSpace
25 200
(
)
CreateSpace
50 200
(
)
CreateSpace
100200
(
)
15
CreateSpace
0 200
(
)
CreateSpace
25 200
(
)
CreateSpace
50 200
(
)
CreateSpace
100 200
(
)
16
Wpływ parametrów
m
,
k
,
c
układu na amplitudę drgań
wymuszonych
(
)
0
0
2
2
2 2
P
k
a
k
k mλ
c λ
=
-
+
0
0
2
2
2
2
2
2
1
1
4
P
a
k
λ
λ
γ
ω
ω
=
�
�
-
+
�
�
�
�
λ ω
=
0
0
P
a
k
�
w strefie przedrezonansowej amplituda
drgań zależy głównie od sztywności układu
λ ω
=
w strefie rezonansowej amplituda drgań
zależy głównie od współczynnika tłumienia
0
dη
dλ
=
0
0
2
P
a
mλ
=
w strefie pozarezonansowej amplituda
drgań zależy głównie od masy układu
Amplituda drgań
rezonansowych
2
1 2
eks
λ
ω
γ
=
-
2
1
2 1
max
η
γ
γ
=
-
1
2
max
η
γ
=
eks
λ
ω
�
λ ω
?
Gdy
jest bliskie 0 to:
c
P
a
0
0

Część 2
Redukcja drgań

18
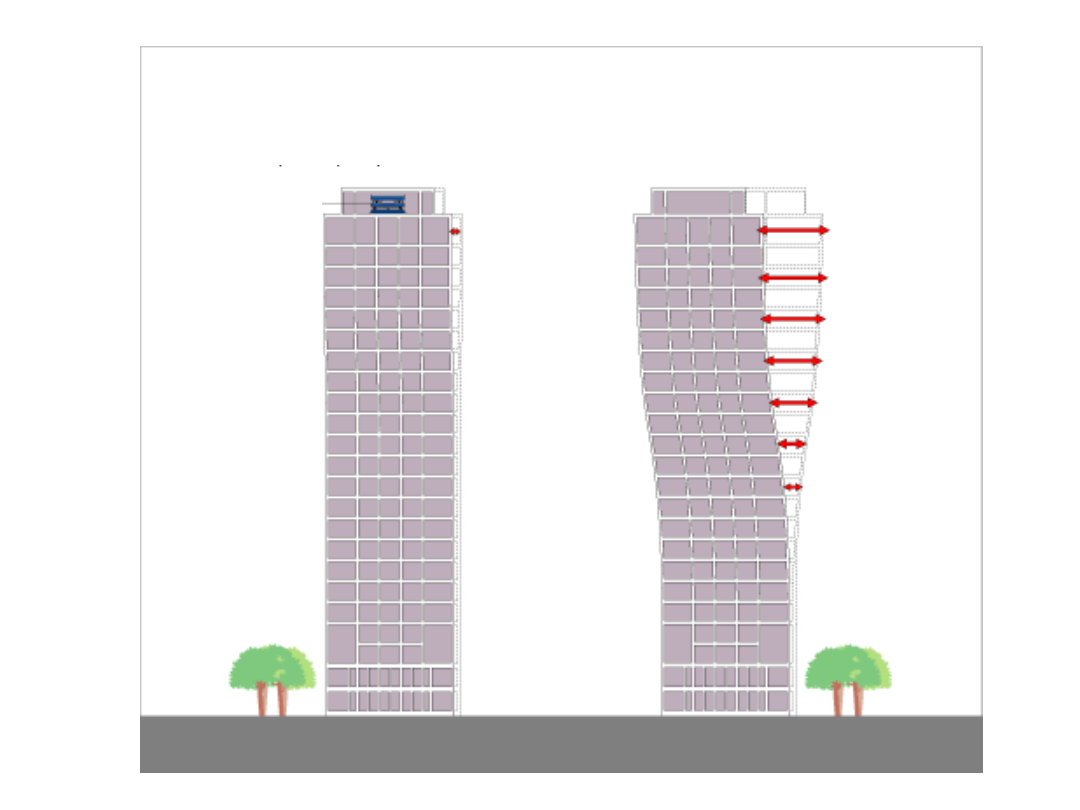
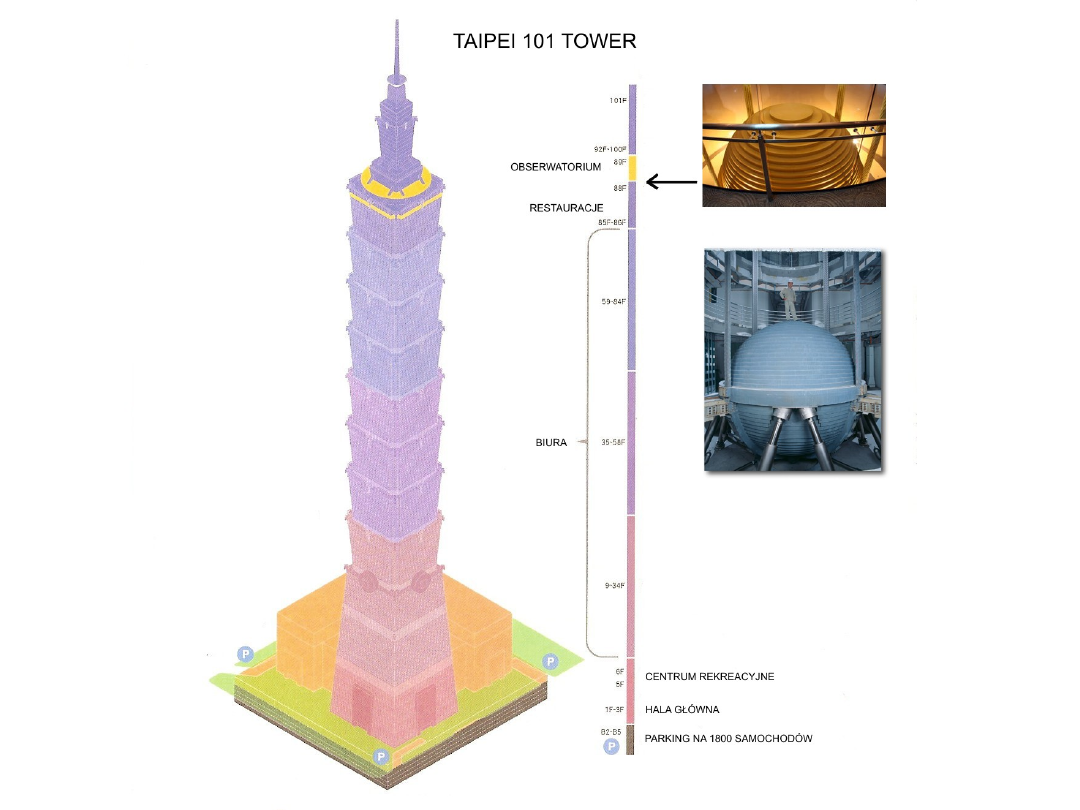
Redukcja drgań w budynkach wysokich
– konstrukcje wiotkie i tym samym podatne na działanie obciążeń
dynamicznych
– zbyt duże amplitudy drgań mogą utrudniać lub nawet uniemożliwiać
prawidłową
eksploatację budynku
– wpływ dużych przemieszczeń i przyspieszeń na samopoczucie
użytkowników
– duże przyspieszenia mogą wywoływać wzrost sił wewnętrznych w
elementach
konstrukcyjnych
– konieczność redukcji drgań budynków posadowionych na terenach
górniczych
– konieczność redukcji drgań wywołanych ruchem pojazdów
Redukcja drgań platform wiertniczych
Redukcja drgań mostów, kładek dla pieszych,
masztów, kominów
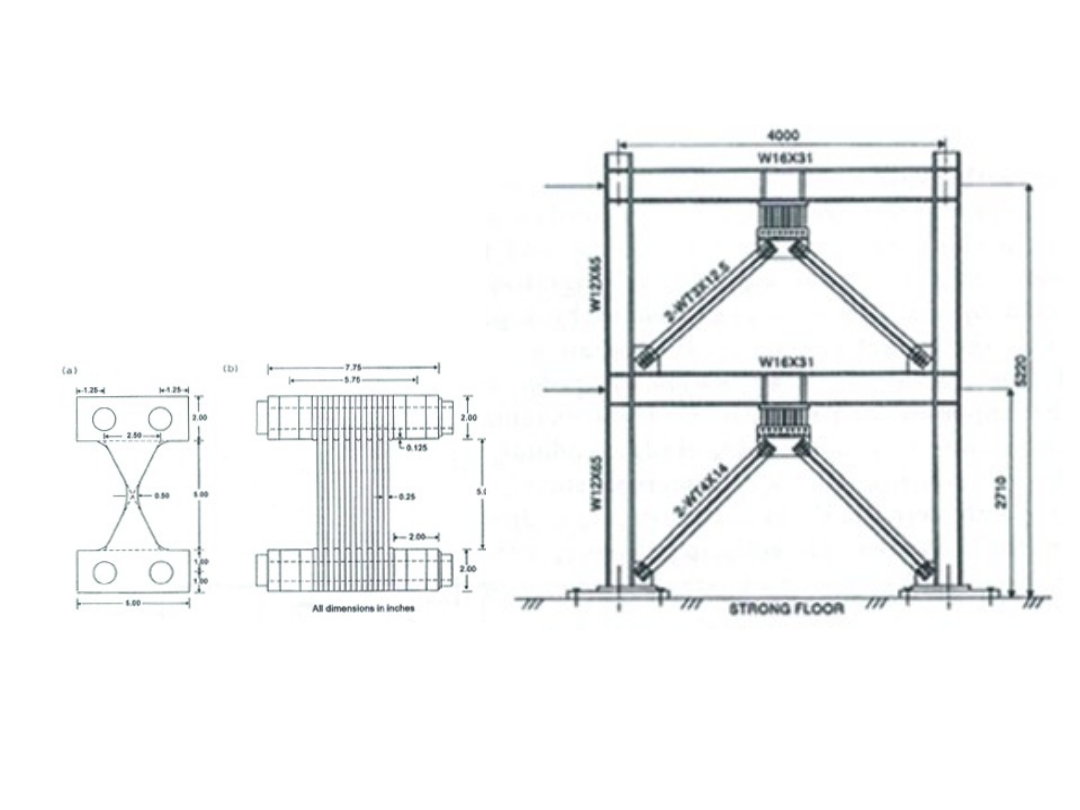
Redukcja drgań konstrukcji wsporczych pod maszyny
19
Z systemem sterowania
Bez systemu sterowania
TMD-RP lub
AMD
20
21

22
Klasyfikacja obciążeń dynamicznych
Podział sił wymuszających ze względu na pochodzenie
- siły wywołane działaniem maszyn
- siły wywołane parciem wiatru
- siły aerodynamiczne wywołane opływem powietrza
- siły wywołane trzęsieniami ziemi
- siły wywołane ruchem pojazdów lub ludzi
Podział sił wymuszających ze względu na ich charakter
- obciążenia deterministyczne (np. działanie maszyn)
- obciążenia o charakterze losowym
• obciążenia niestacjonarne (trzęsienie ziemi)
• obciążenia stacjonarne (parcie wiatru)
Podział sił wymuszających ze względu na okresowość
- obciążenia okresowe
- obciążenia nieokresowe (np. impulsowe)

23

24
Klasyfikacja metod redukcji drgań
- metody pasywne
- metody aktywne
- metody półaktywne
Redukcja drgań
- poprzez zwiększenie możliwości rozpraszania energii
- poprzez modyfikację sztywności konstrukcji
- poprzez modyfikację obciążenia dynamicznego konstrukcji
- poprzez modyfikację częstości drgań własnych konstrukcji

25
Eliminator drgań
Urządzenie wbudowane w konstrukcję w celu zmniejszenia
efektów dynamicznego oddziaływania obciążenia na
konstrukcję
- Pasywne eliminatory drgań
- Aktywne eliminatory drgań
- Półaktywne eliminatory drgań
26

27
Pasywne eliminatory drgań
- Działanie nie wymaga dostarczania energii ze źródeł
zewnętrznych
- Zasada działania może polegać na rozpraszaniu energii
(lepkosprężyste
tłumiki drgań, lepkie tłumiki drgań, metalowe tłumiki
drgań,
wibroizolatory)
- Zasada działania może polegać na modyfikacji częstości
drgań
własnych konstrukcji (dynamiczne (masowe) tłumiki drgań)
- Charakteryzują się stałością parametrów, co oznacza, że w
trakcie
eksploatacji te parametry nie mogą być w sposób
zamierzony
zmieniane
- Są to najczęściej stosowane eliminatory drgań
28
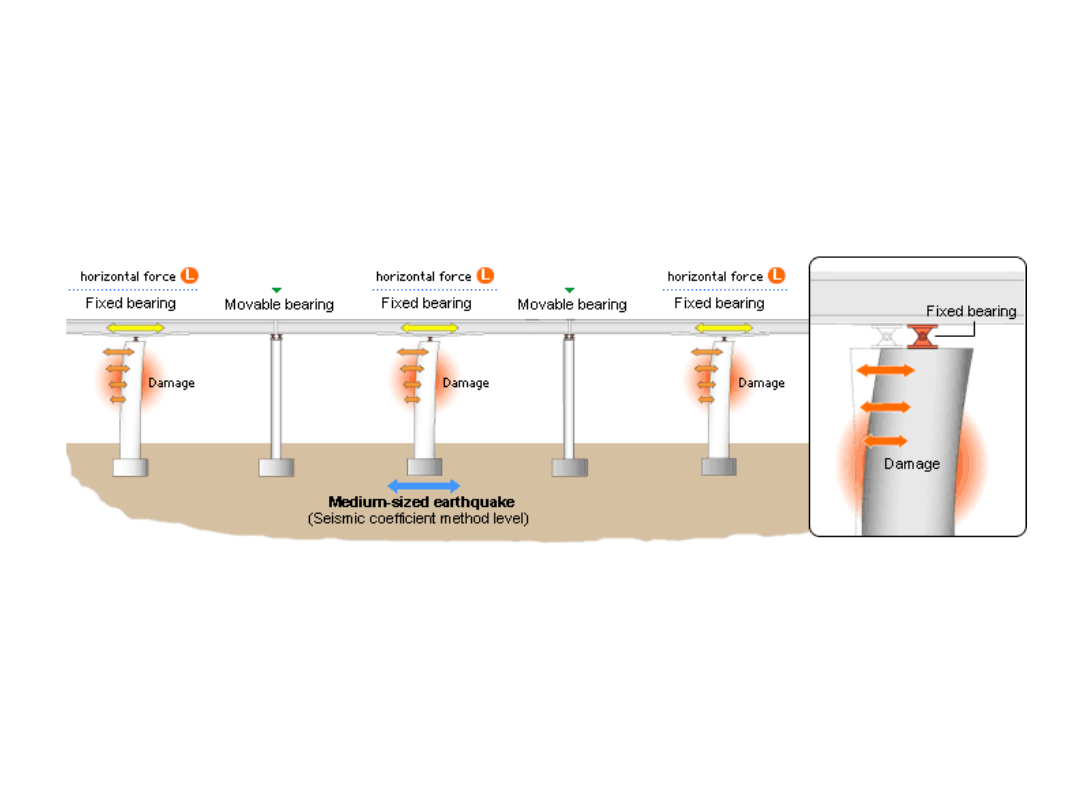
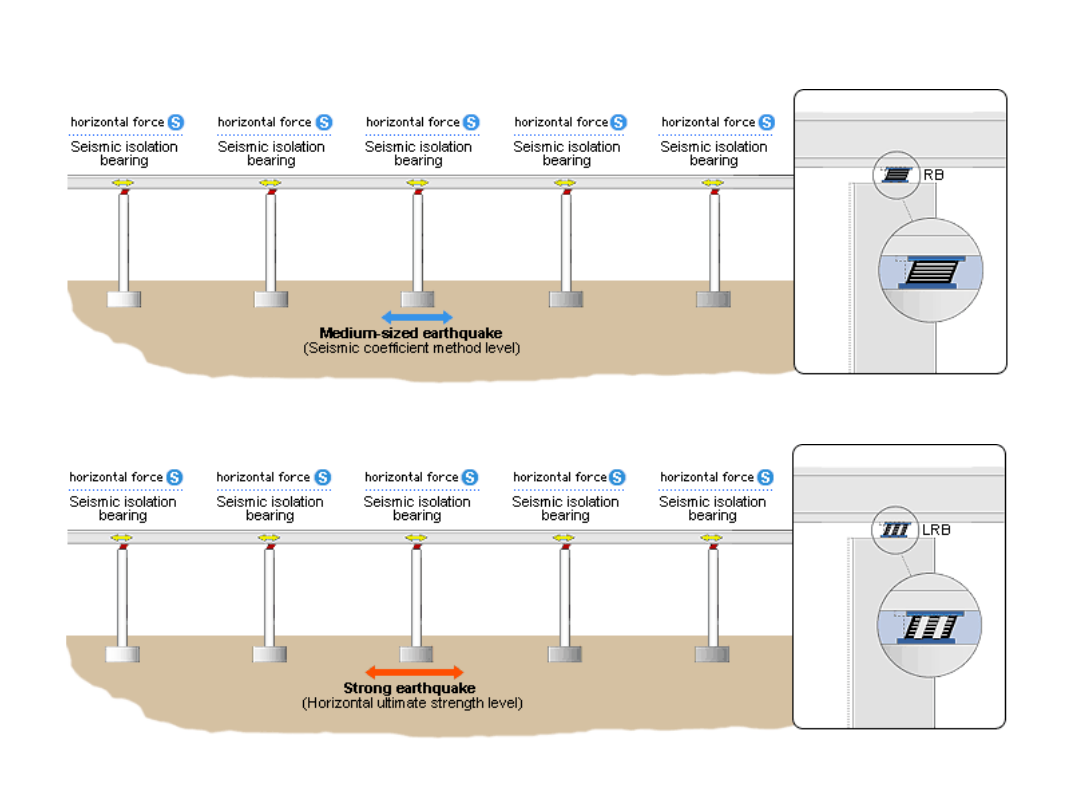
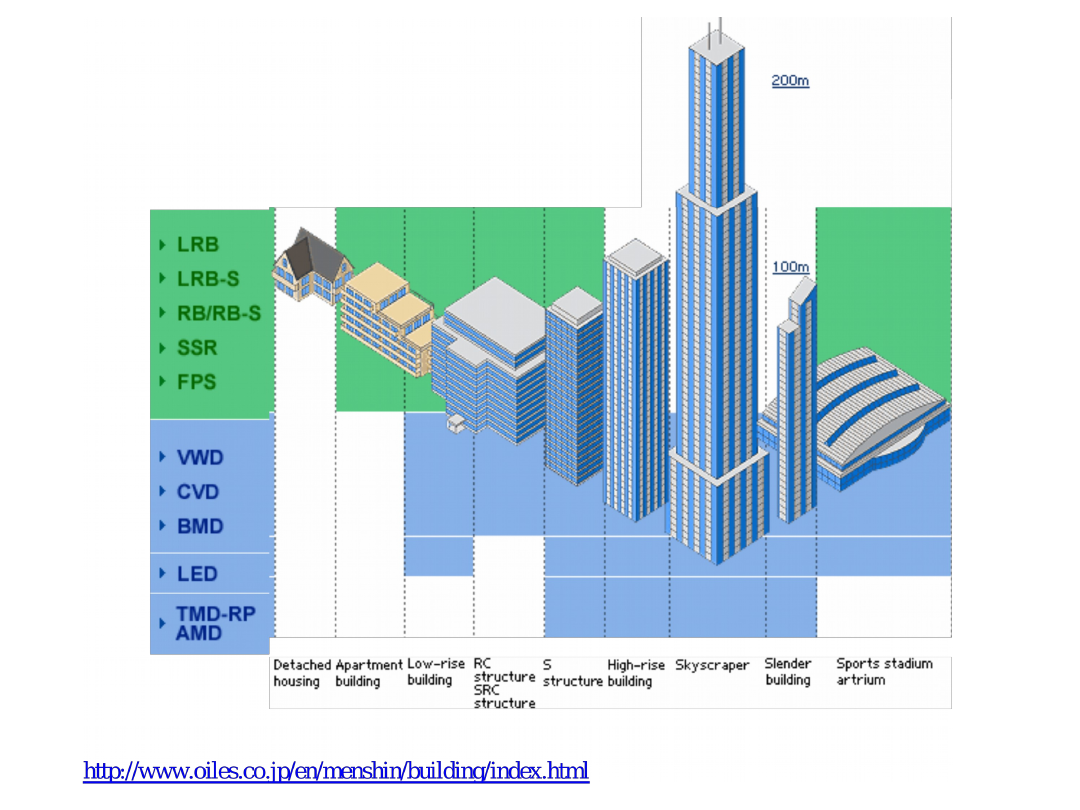
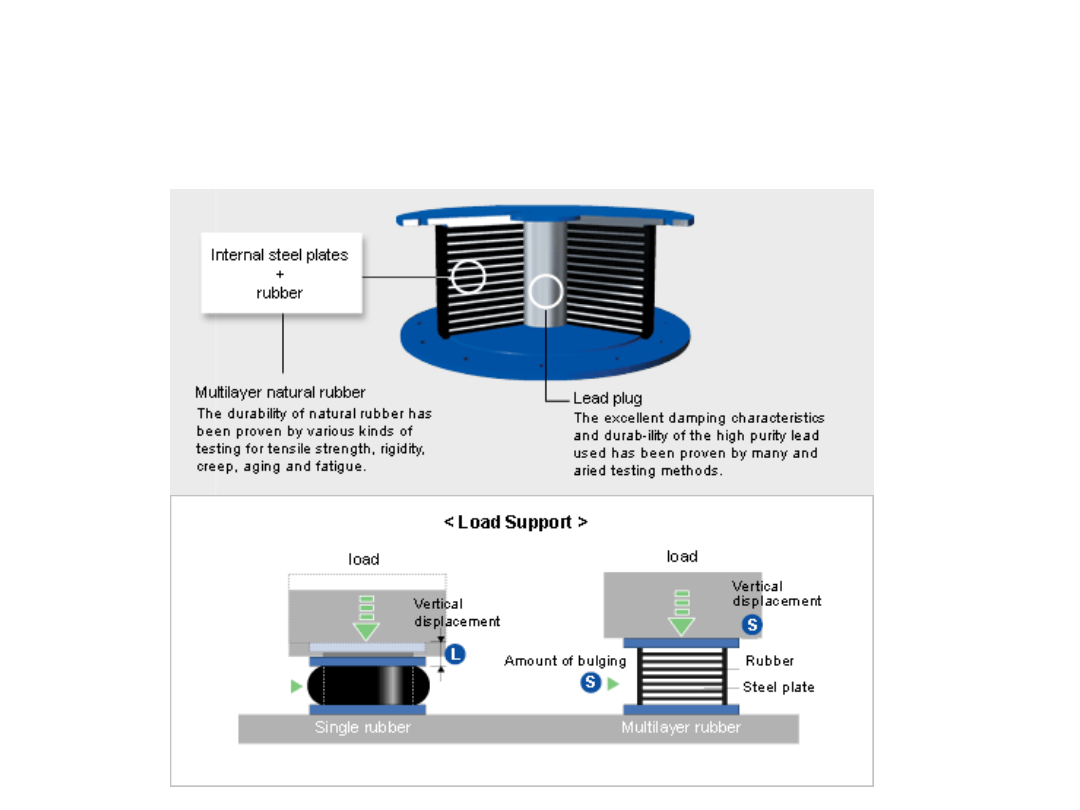
LRB
- Lead Rubber Bearing
- łożysko ołowiano – gumowe
29
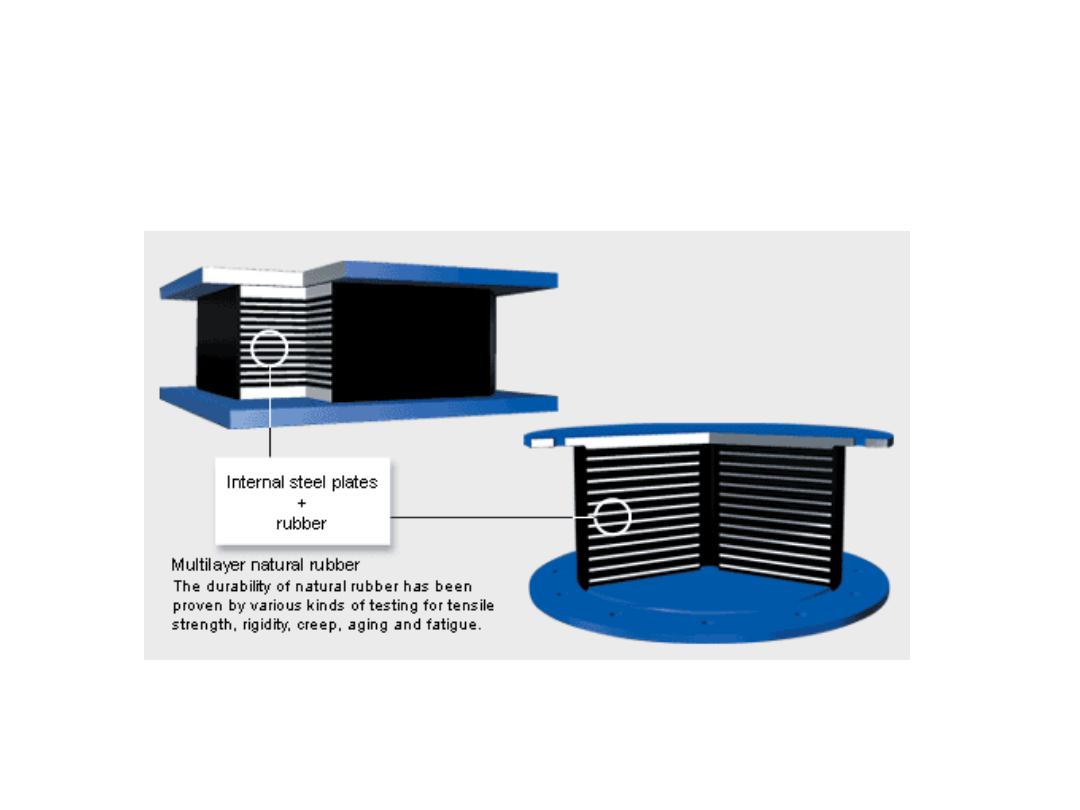
RB
- Rubber Bearing
- łożysko gumowe
30
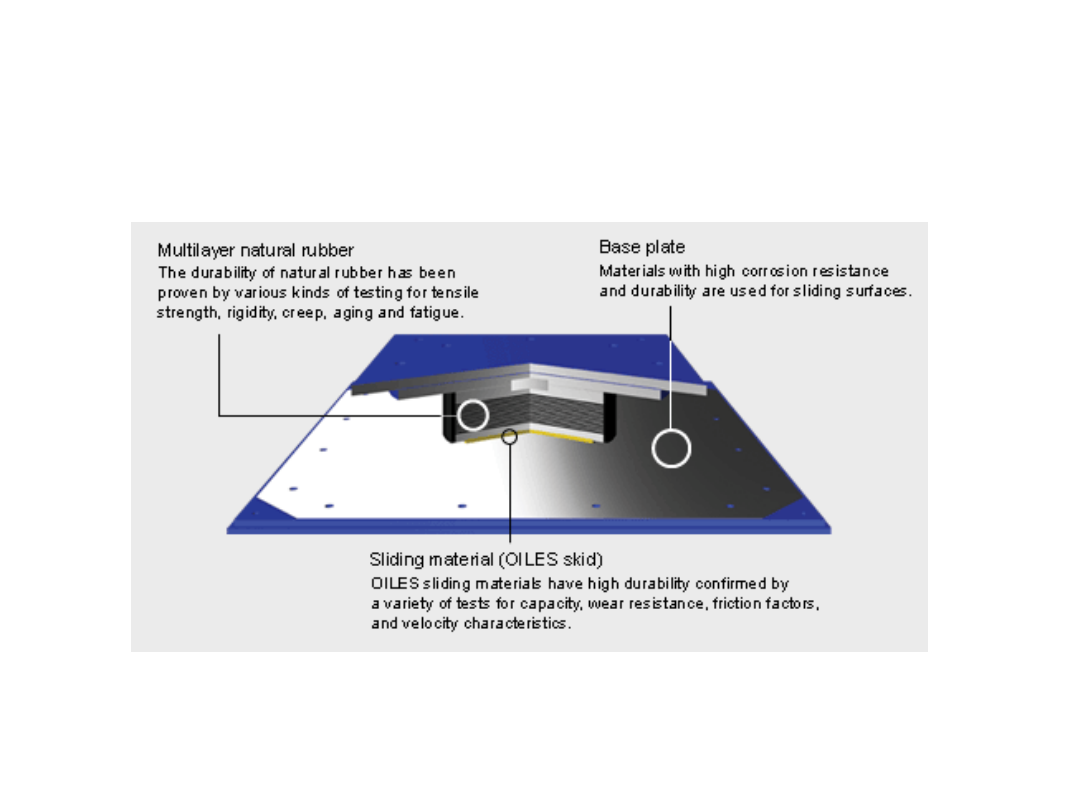
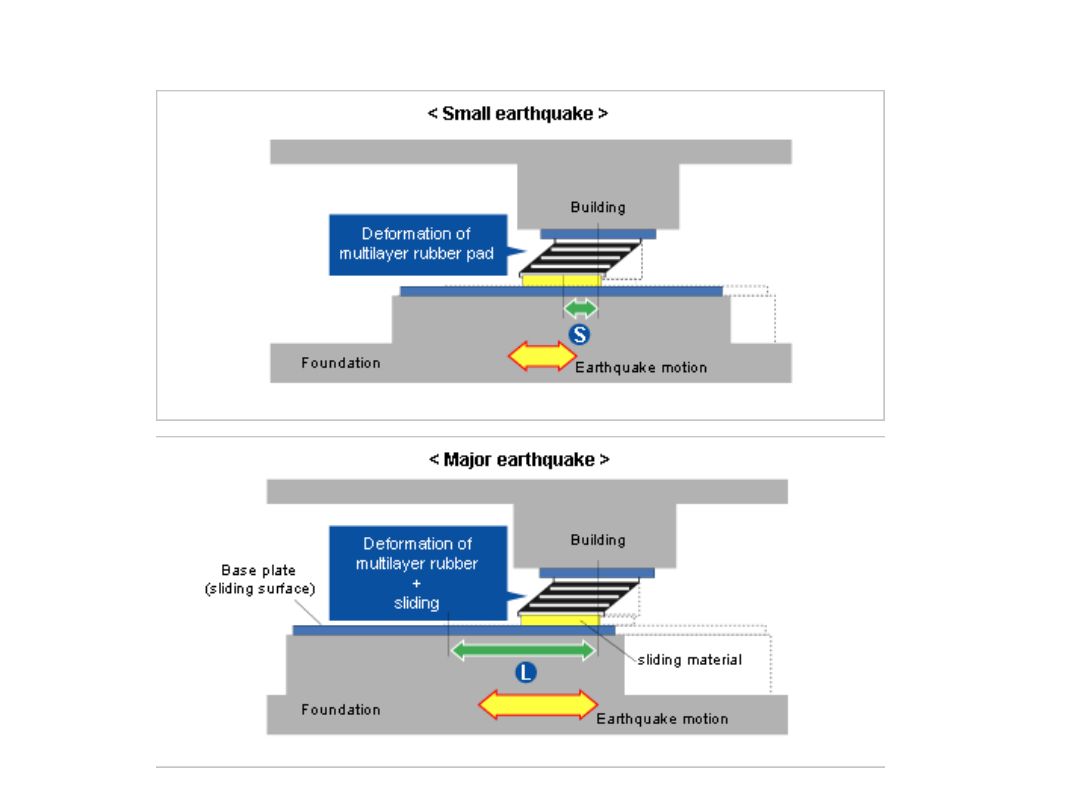
SSR
- Sliding Support With Rubber-pad
31
32
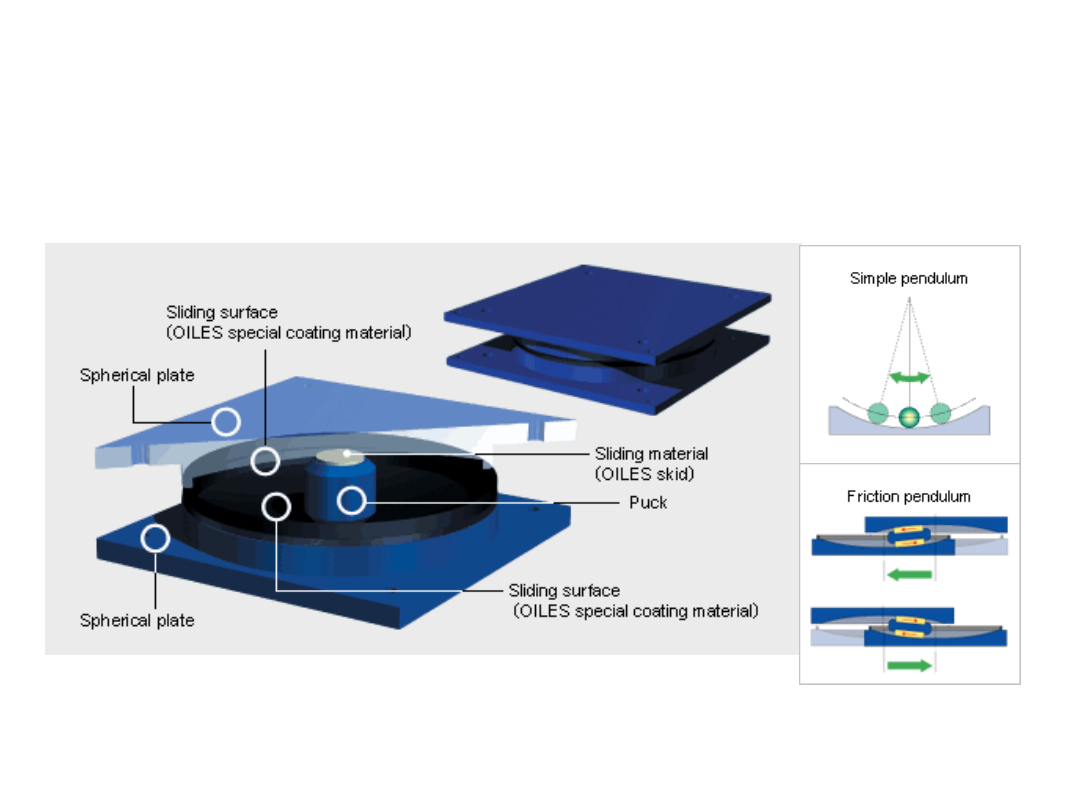
FPS
- Friction Pendulum System
- system wahadłowy z tarciem
33
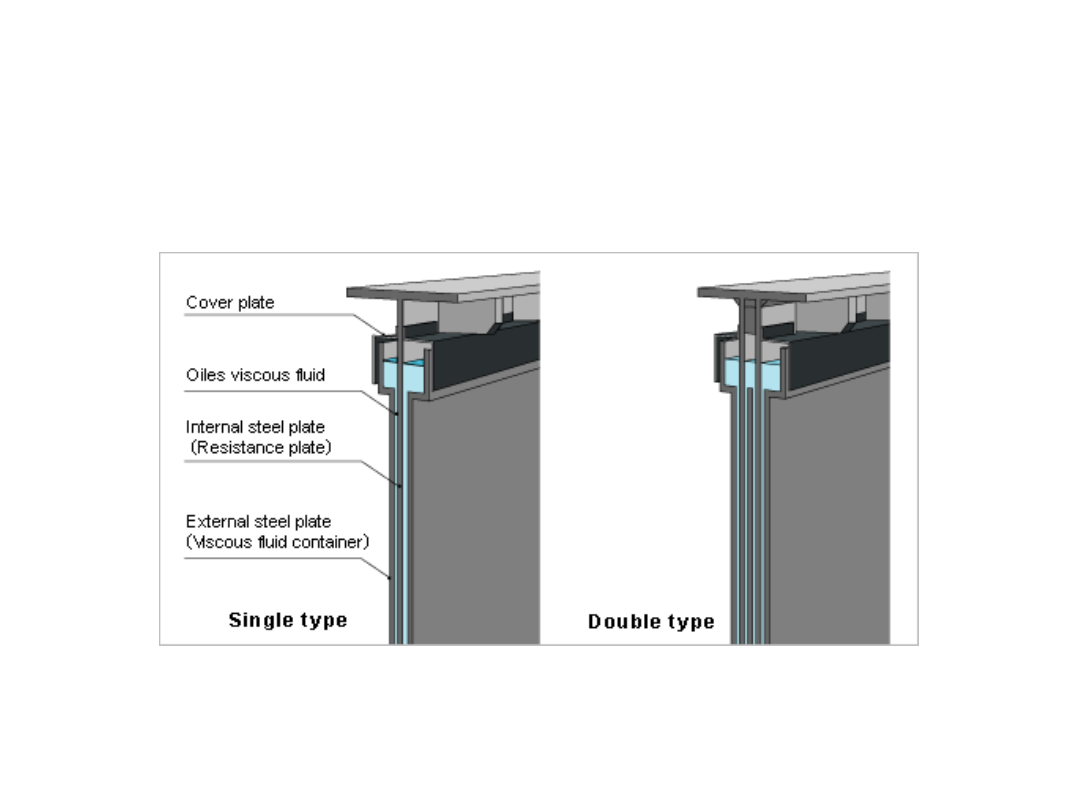
VWD
- Vibration Wall Damper
- tłumik drgań ścian

34
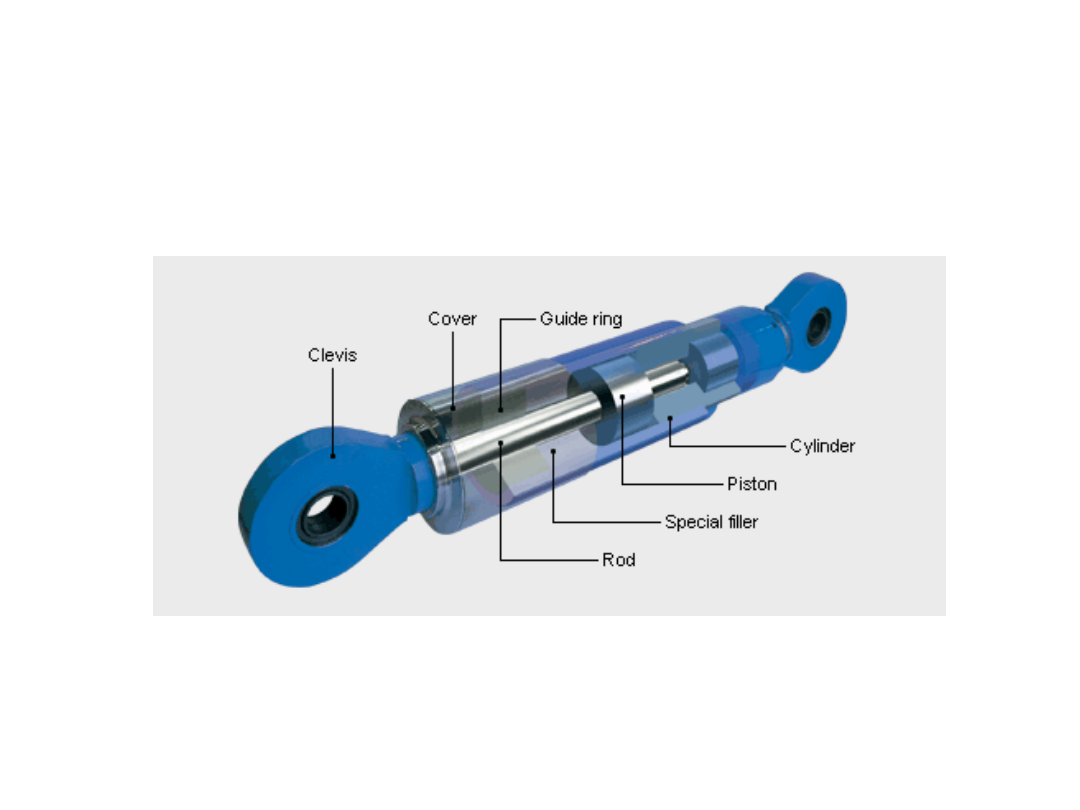
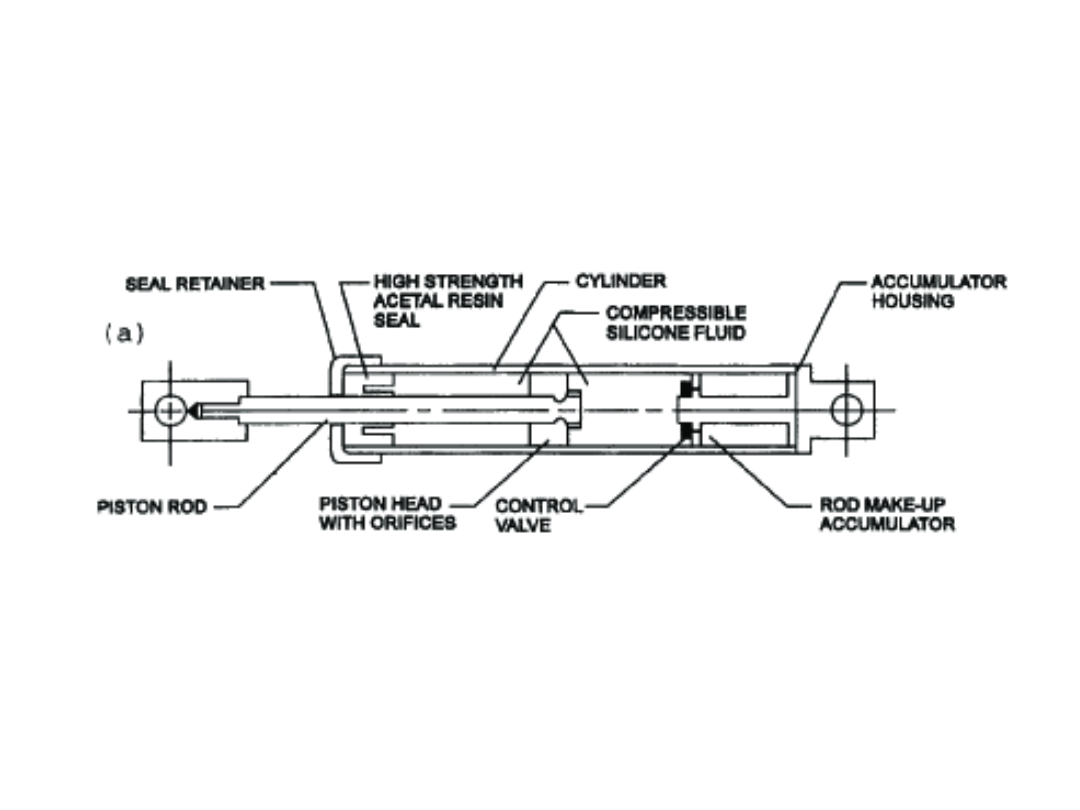
CVD
- Cylindrical Viscous Damper
- wiskotyczny tłumik cylindryczny
35
BMD
- Binghum Material Damper
- Tłumik z materiałem Binghama
36
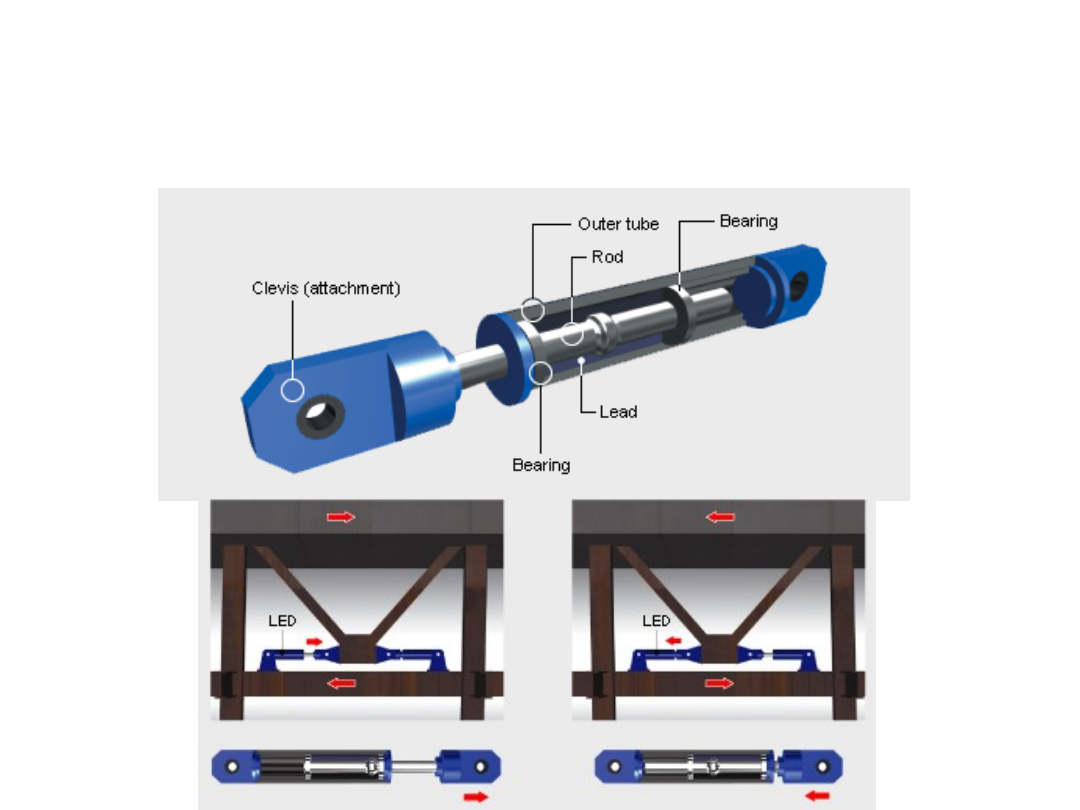
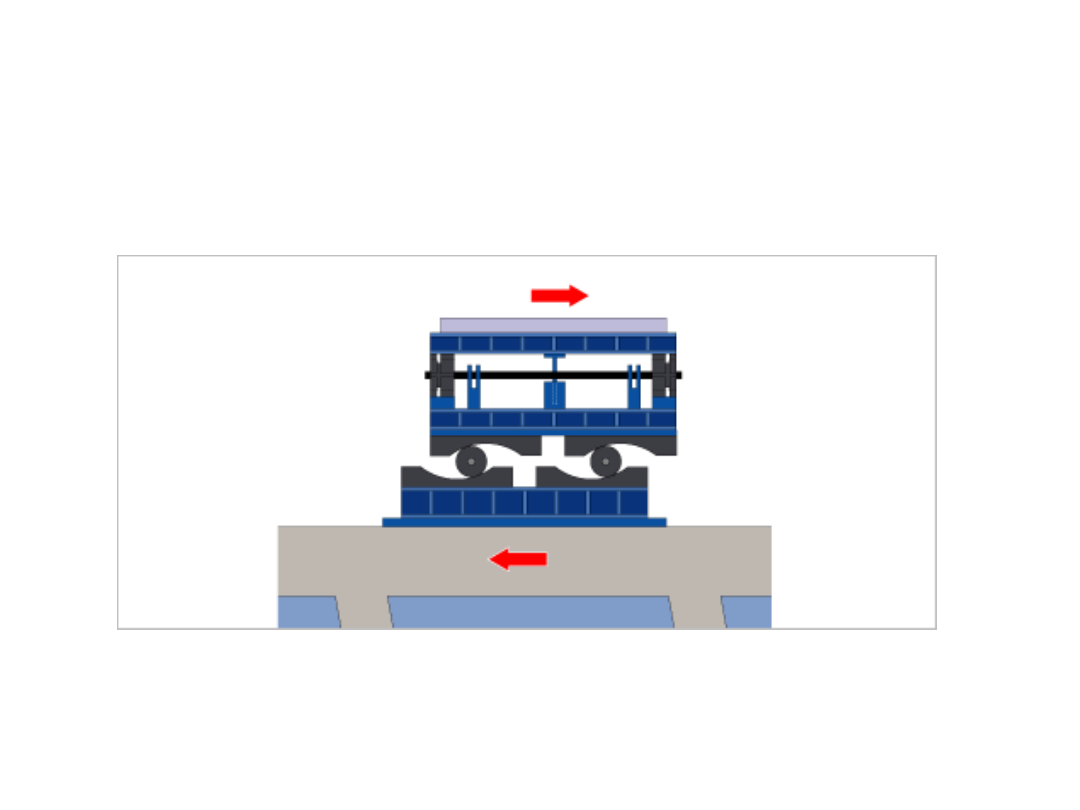
LED
- Lead Extrusion Damper
- tłumik z wyciskanym ołowiem
37
TMD-RP- Tuned Mass Damper – Roller Pendulum type
- dostrojony tłumik masowy
38
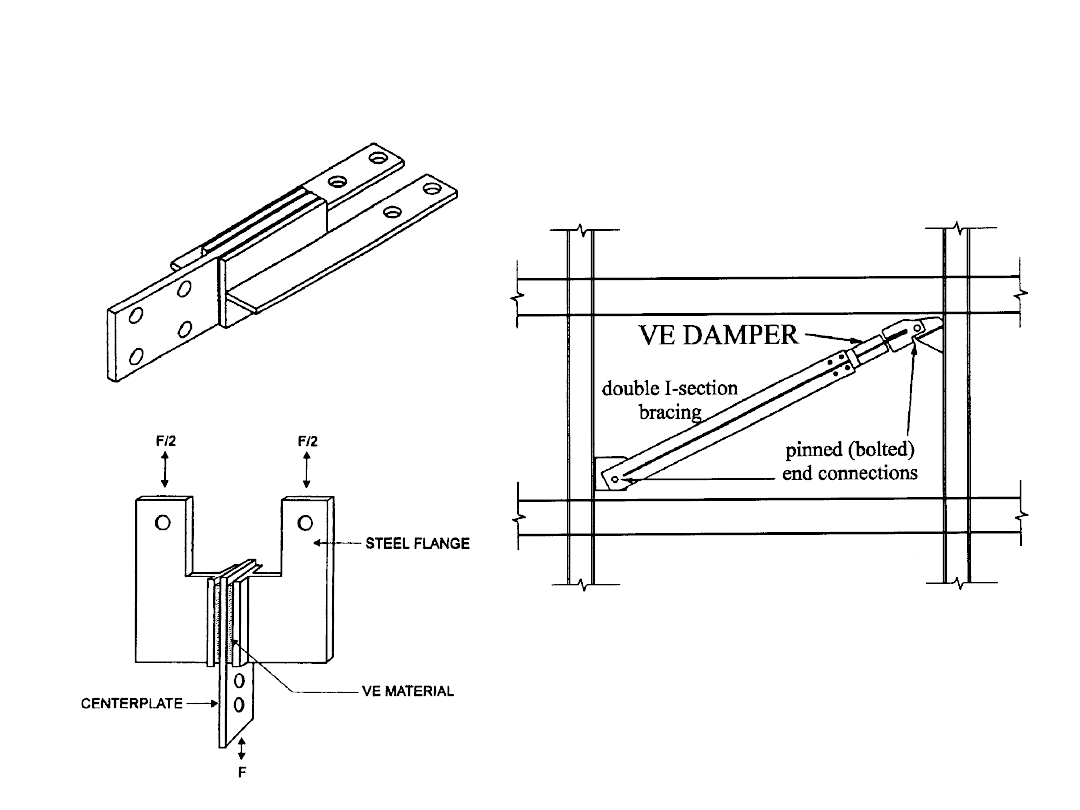
Lepkosprężyste tłumiki drgań
39
Lepki tłumik drgań
40
Metalowy tłumiki drgań
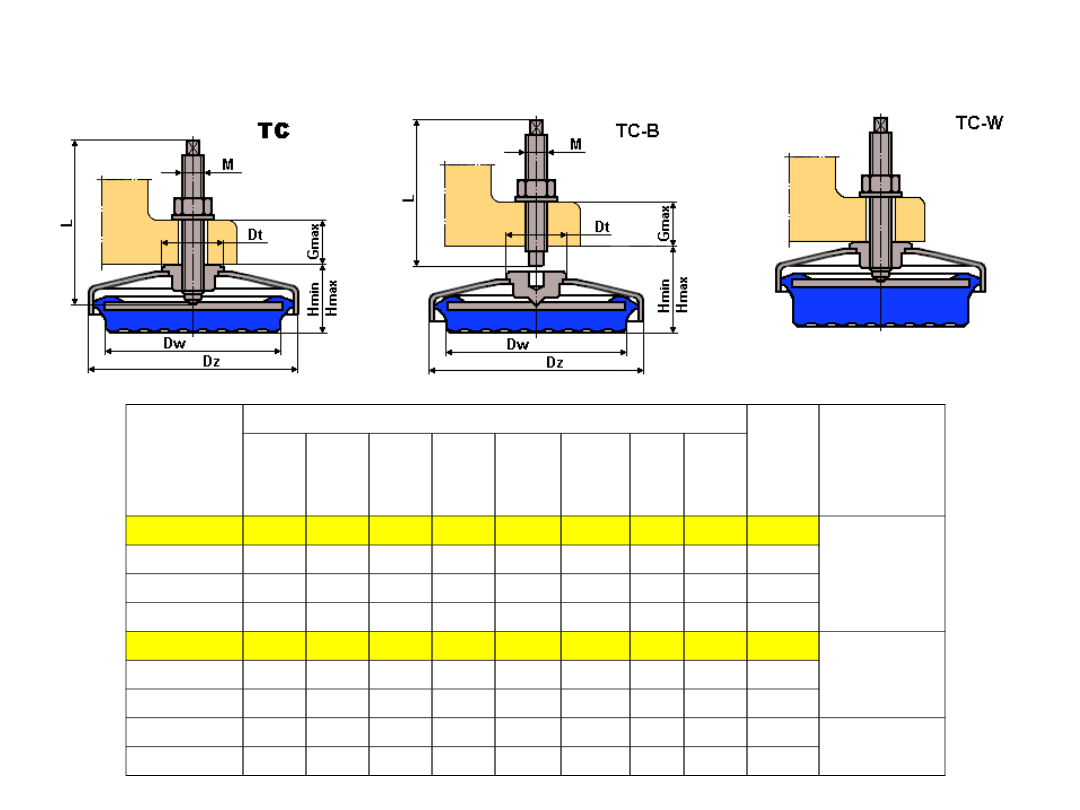
41
Typ
i wielkość
Wymiary (mm)
Waga
(kg)
Max.
obciążenie
jednostkow
e (kg)
Dw
Dz
Dt
Hmi
n
Hma
x
Gmax
M
L*
TC-160
160
190
60
50
65
65
20
150
3,0
1800
TC-B-160
160
190
60
50
85
65
20*
150
3,0
TC-160W
160
190
60
68
83
65
20
150
3,4
TC-B-160W
160
190
60
68
83
65
20
150
3,4
TC-200
200
230
65
52
70
80
24
175
5,0
2800
TC-B-200
200
230
65
52
90
80
24*
175
5,0
TC-200W
200
230
65
72
90
80
24
175
5,5
TC-B-200W
200
230
65
72
110
80
24
175
5,5
4000
TC-200WW
200
230
65
72
90
80
24
175
6,2
Wibroizolatory talerzowe
42
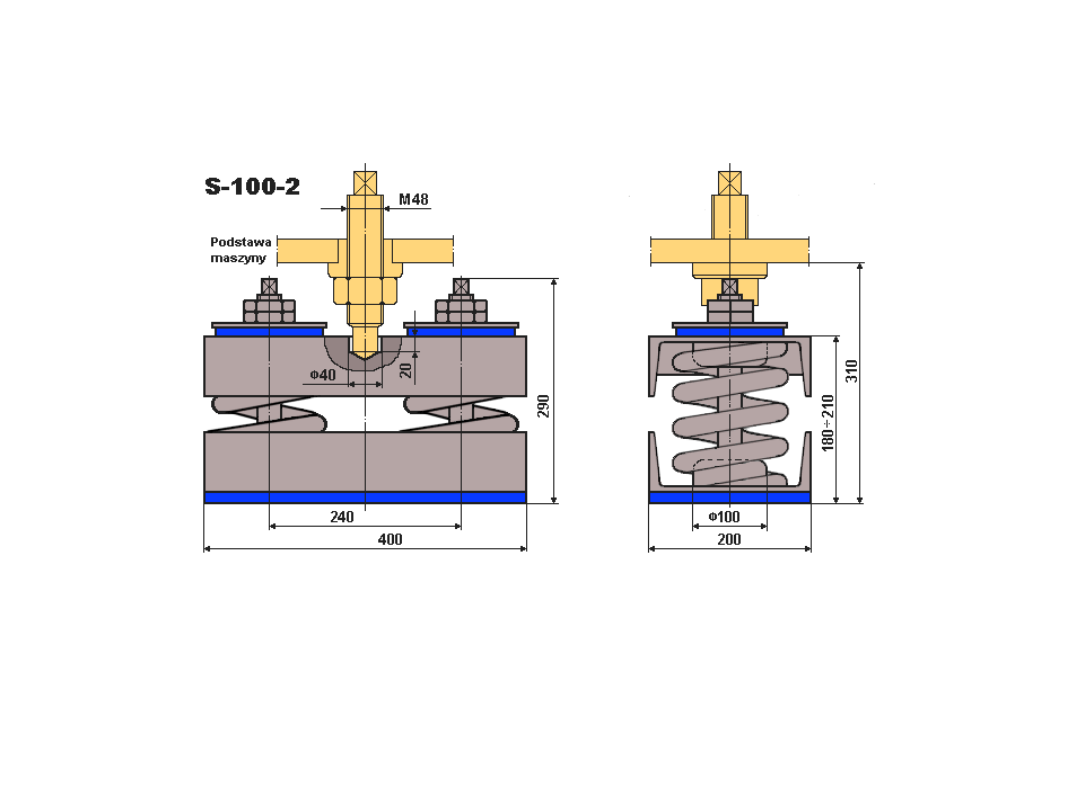
Zastosowanie:
Bardzo ciężkie wentylatory, sprężarki i inne maszyny do trudnych
warunków wibroizolacji
Wibroizolatory sprężynowe
43
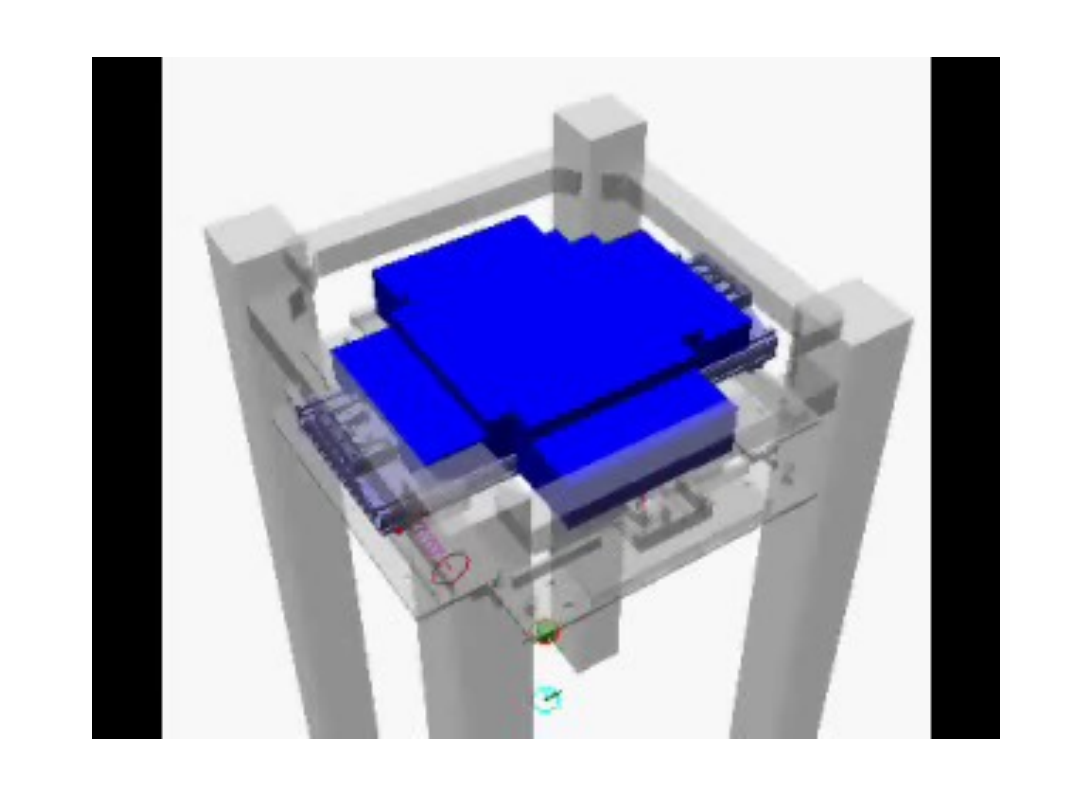
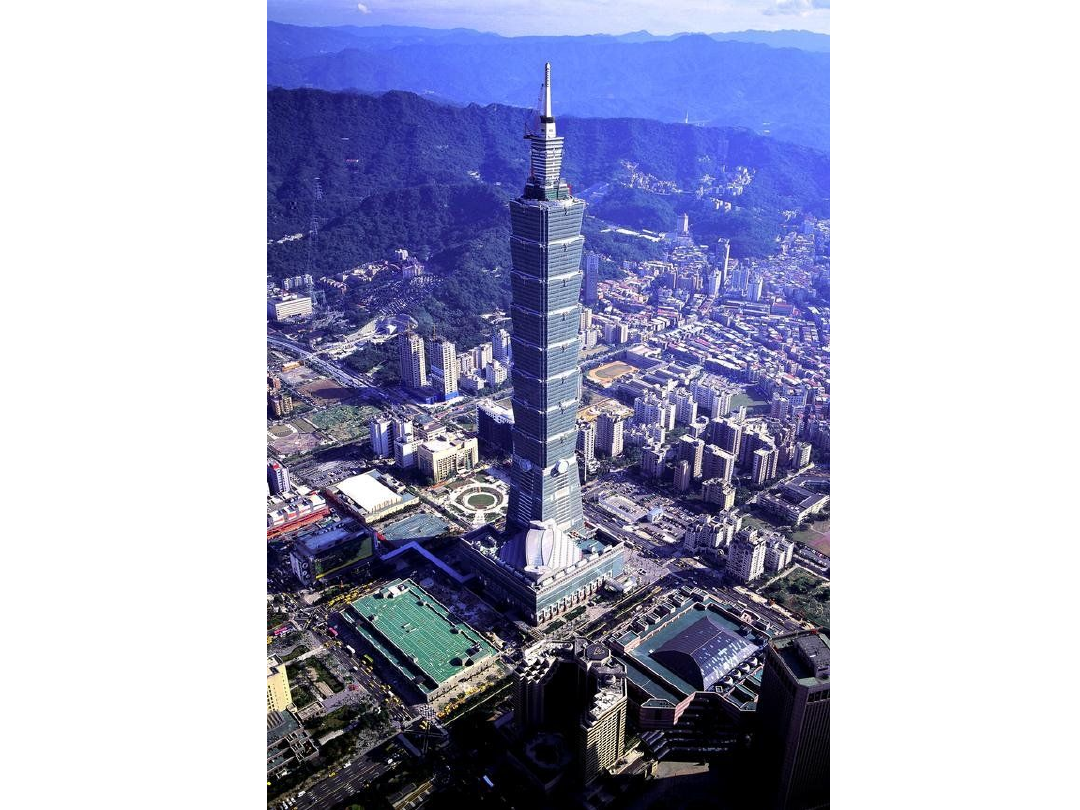
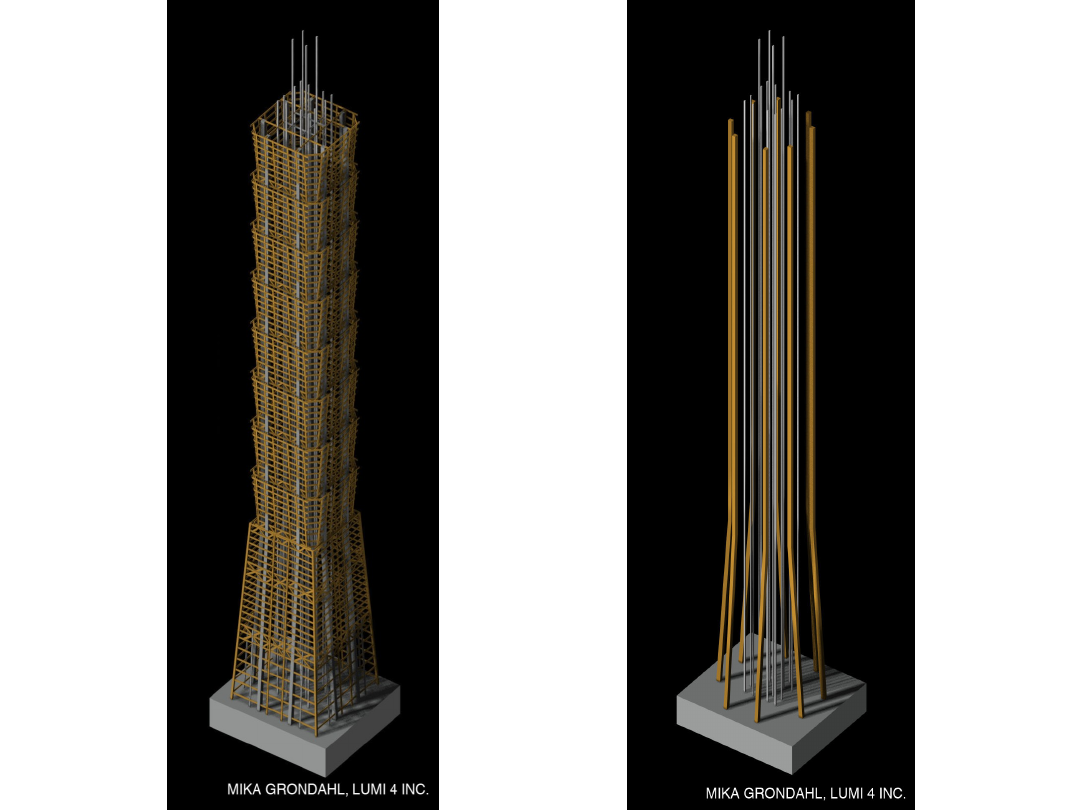
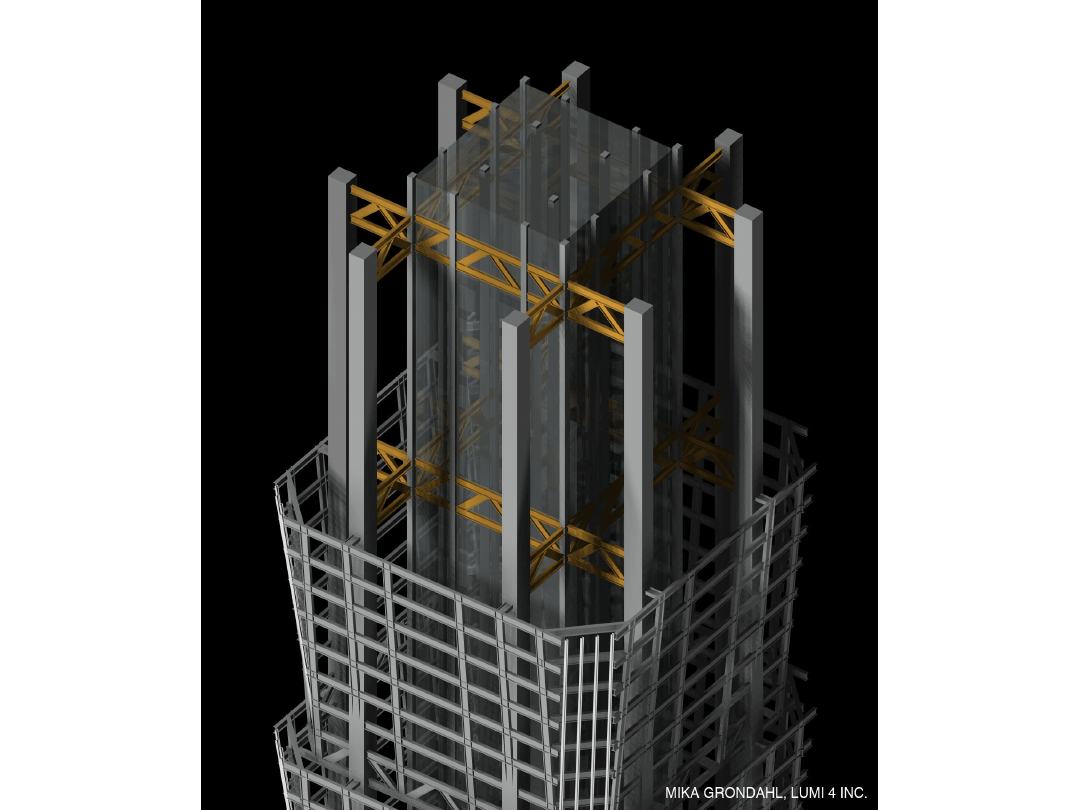
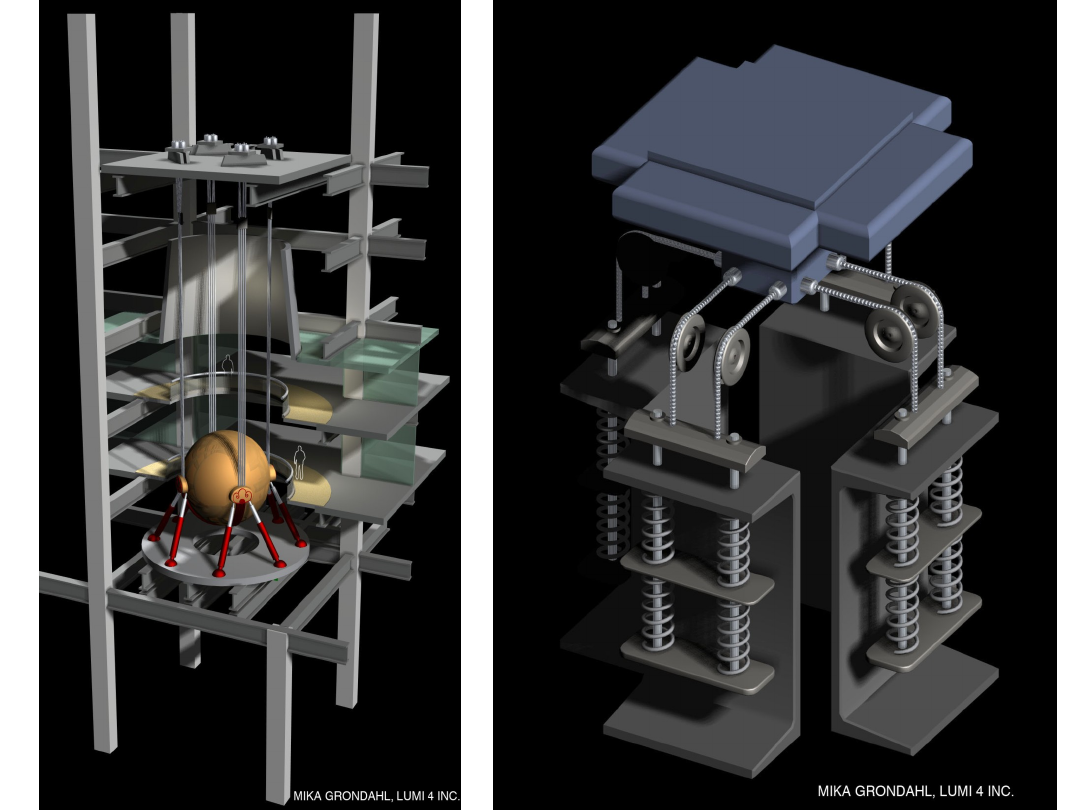
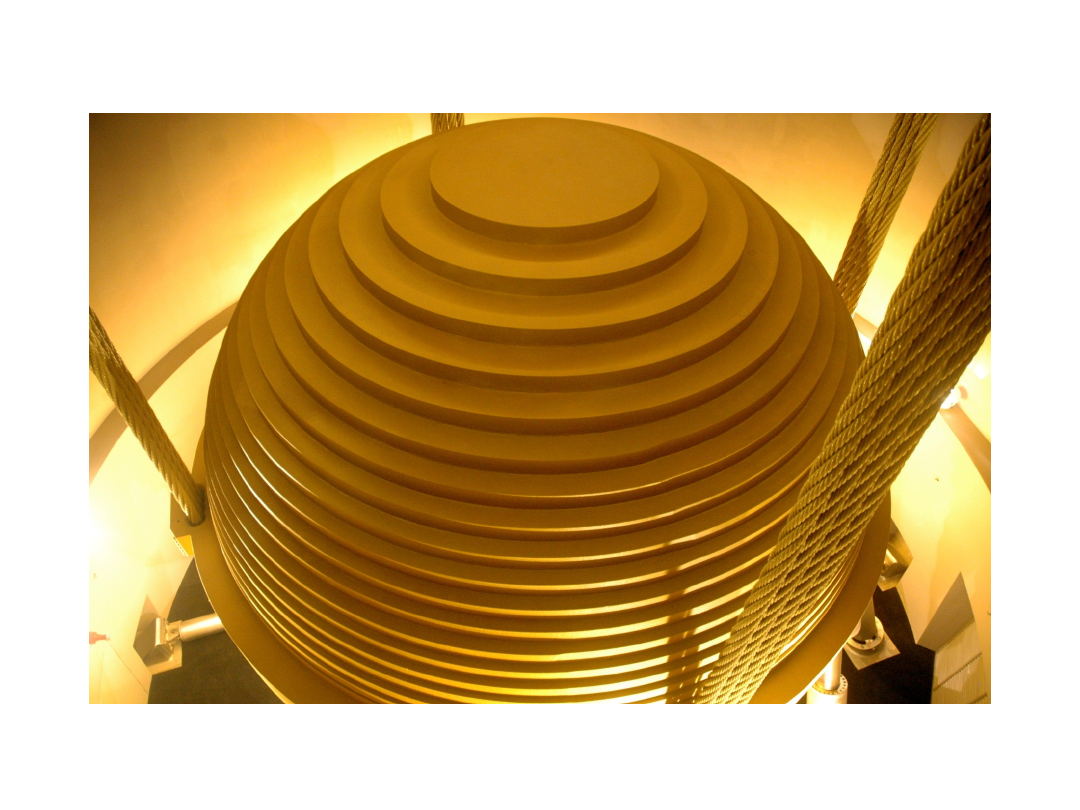
Masowy eleminator drgań (TAIPEI 101 TOWER)

44
Aktywne eliminatory drgań
- Zasada działania polega na generowaniu dodatkowych sił
działających
na konstrukcję w celu przeciwdziałania niekorzystnym
obciążeniom
dynamicznym
- Stanowią układ automatycznej regulacji obciążenia
dynamicznego
konstrukcji
- Działanie wymaga dostarczenia energii ze źródła
zewnętrznego
45
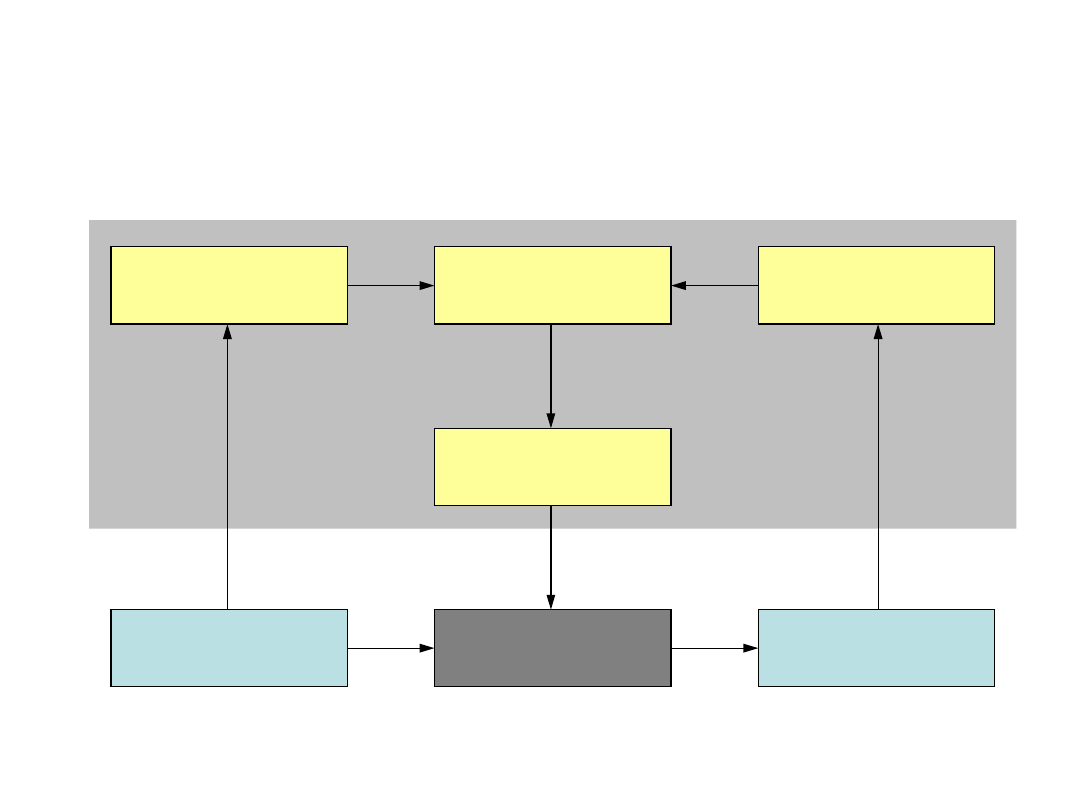
czujniki
komputer
czujniki
siłowniki
konstrukcja
wymuszenie
odpowiedź
Schemat blokowy systemu sterowania
System sterowania

46
Schemat ideowy
systemu
sterowania
47
48
49
50
51
52

53
Aktywny eleminator drgań (TAIPEI 101 TOWER)

54
Półaktywne eliminatory drgań
- Stanowią układ automatycznej regulacji obciążenia
dynamicznego
konstrukcji, które łączą cechy pasywnych i aktywnych
eleminatorów
drgań
- Charakteryzują się bardzo małym, w porównaniu z
eliminatorami
aktywnymi, zapotrzebowanie na energię. Siły generowane
w tych
eliminatorach mają charakter sił tłumienia
- Parametry urządzenia generującego siły regulacji można w
sposób
zamierzony zmieniać
- Półaktywny eliminator drgań to każdy układ pasywny, w
którym
możliwa jest zmiana parametrów w czasie rzeczywistym

55
Rodzaje półaktywnych eliminatorów drgań
- Półaktywne tłumiki hydrauliczne
- Półaktywne tłumiki wiskotyczne
- Półaktywne tłumiki elektroreologiczne
- Półaktywne tłumiki magnetoreologiczne
- Półaktywne tłumiki tarciowe
- Półaktywne tłumiki zmieniające sztywność konstrukcji
- Półaktywne tłumiki cieczowe
56
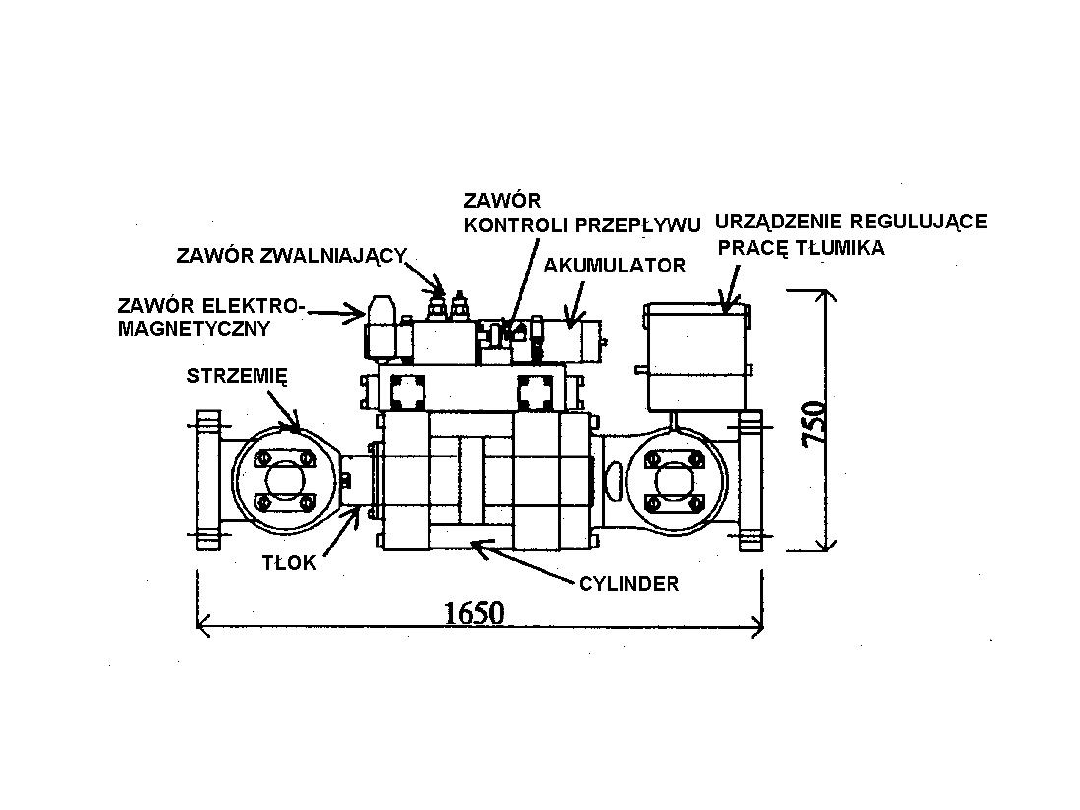
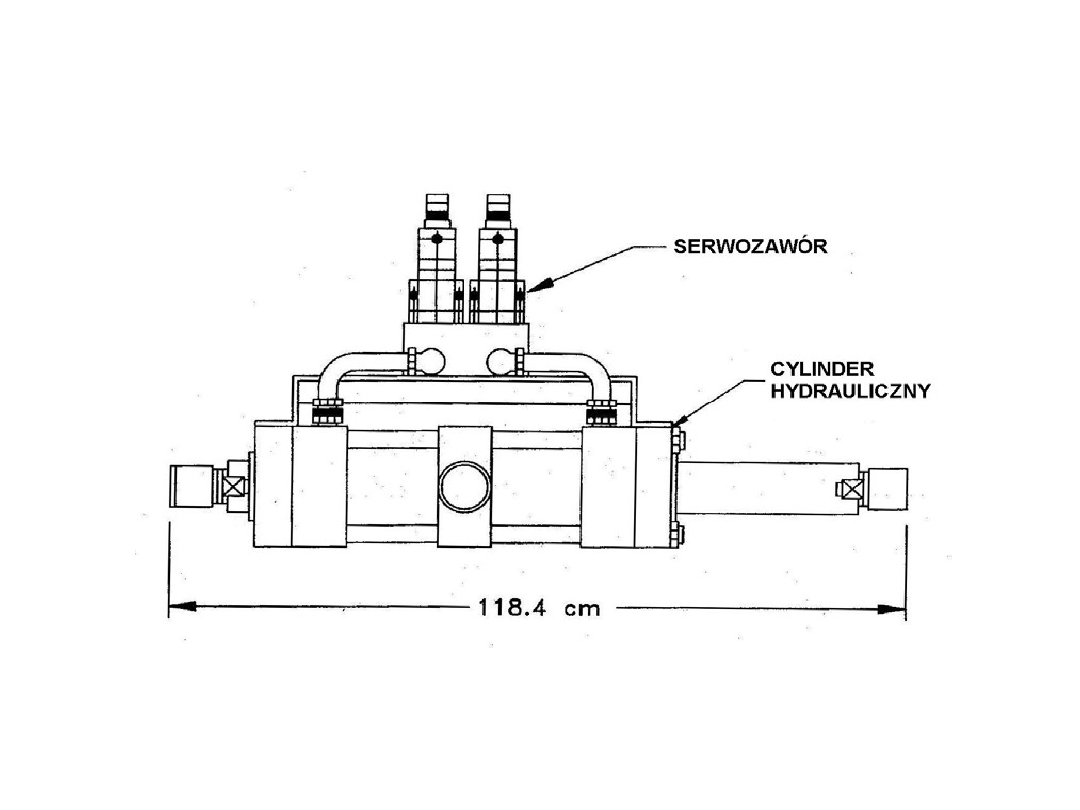
Półaktywny tłumik hydrauliczny
57
Półaktywny tłumik hydrauliczny opracowany przez
Kawashima
58
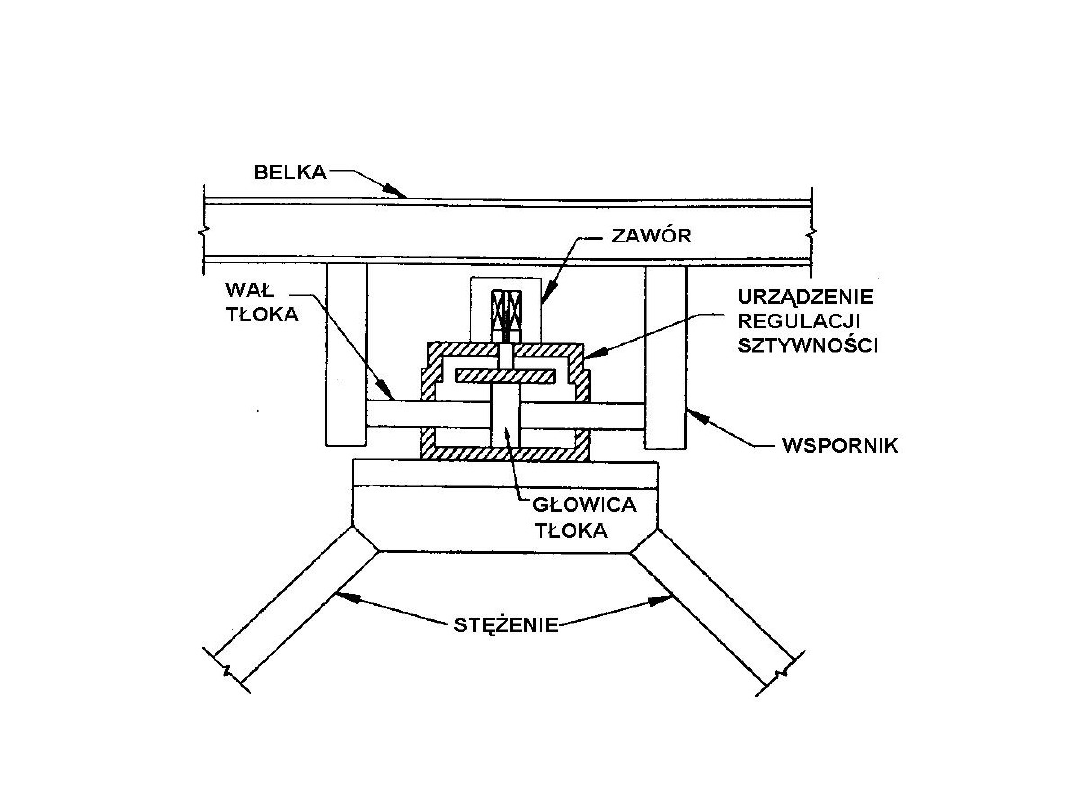
Schemat urządzenia półaktywnej regulacji sztywności
59
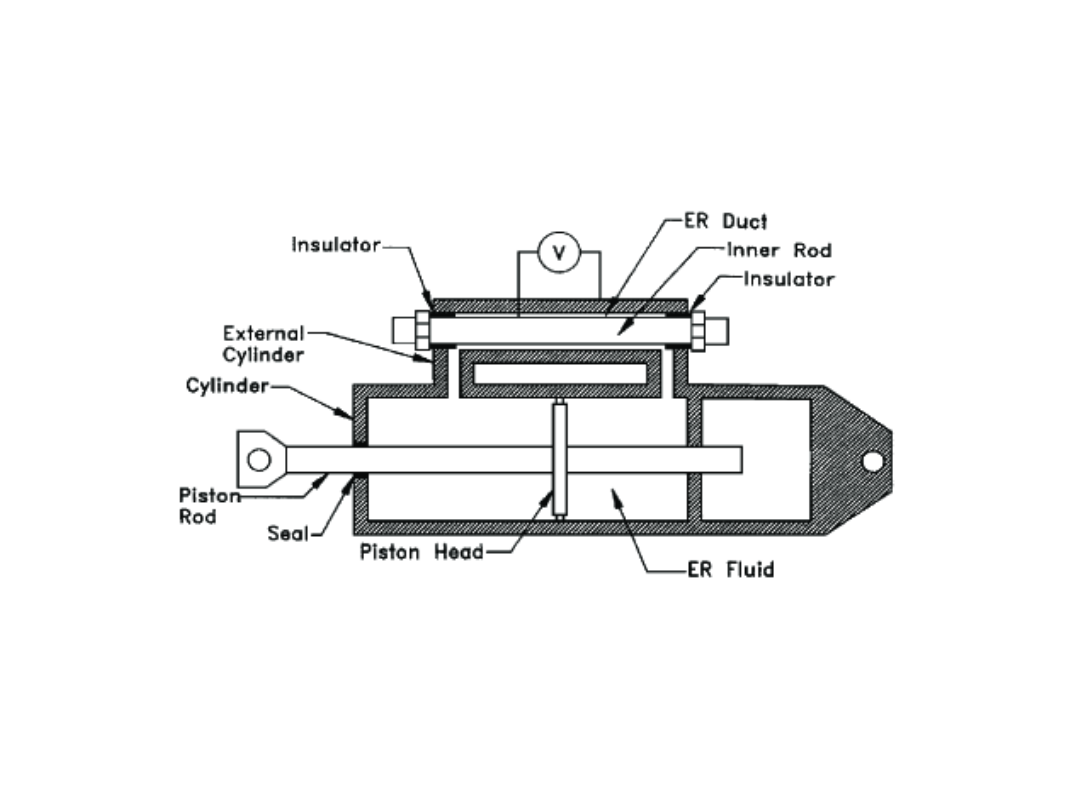
Schemat półaktywnego wzbudnika ER
60
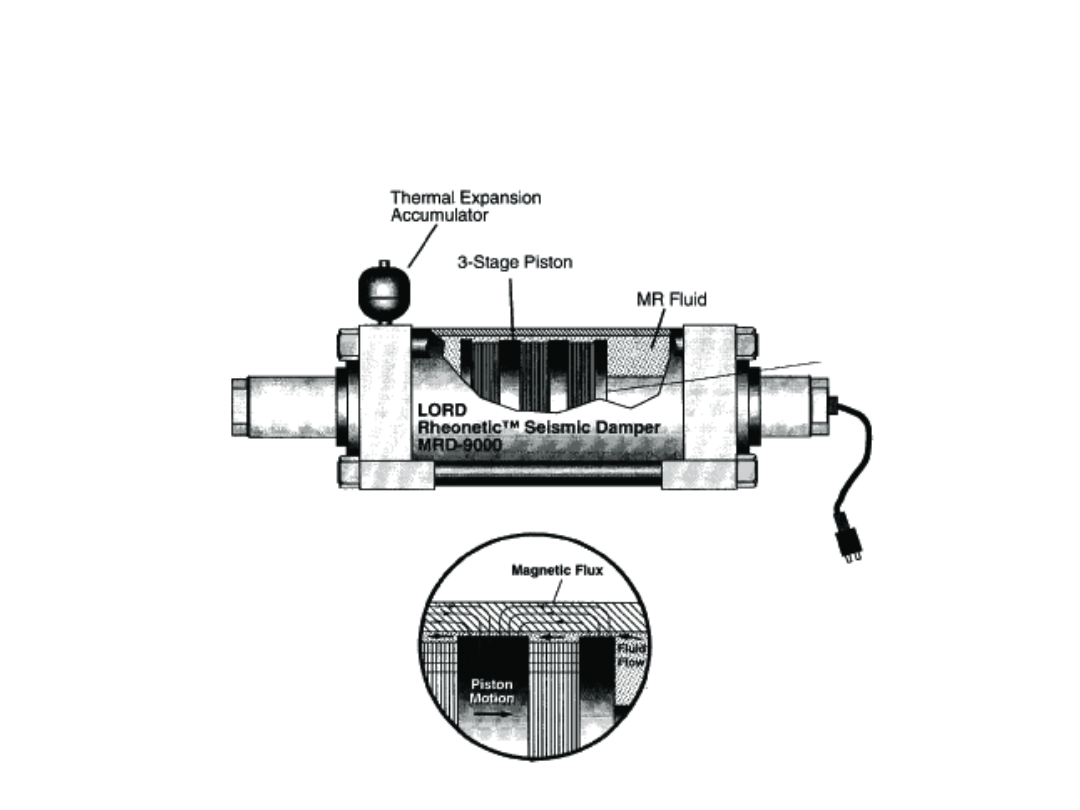
Magnetoreologiczny tłumik drgań firmy Lord Corporation
Document Outline
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Slide 22
- Slide 23
- Slide 24
- Slide 25
- Slide 26
- Slide 27
- Slide 28
- Slide 29
- Slide 30
- Slide 31
- Slide 32
- Slide 33
- Slide 34
- Slide 35
- Slide 36
- Slide 37
- Slide 38
- Slide 39
- Slide 40
- Slide 41
- Slide 42
- Slide 43
- Slide 44
- Slide 45
- Slide 46
- Slide 47
- Slide 48
- Slide 49
- Slide 50
- Slide 51
- Slide 52
- Slide 53
- Slide 54
- Slide 55
- Slide 56
- Slide 57
- Slide 58
- Slide 59
- Slide 60
Wyszukiwarka
Podobne podstrony:
MT st w 06
MT st w 02a
MT st w 06 [tryb zgodności]
MT st w 08 [tryb zgodności]
MT st w 02a 2
MT st w 10
MT st w 13
MT st w 03
MT st w 04 cz1 [tryb zgodności]
MT st w 05 [tryb zgodności]
mt ss w 15 2014 lato
MT st w 03
MT st w 04 cz2 [tryb zgodności]
MT st w 14
MT st w 13
więcej podobnych podstron