
Wykład 13
MECHANIKA TEORETYCZNA
Studia stacjonarne I stopnia – rok akademicki 2013/14
Autor:
Henryk Laskowski
Katedra Podstaw Mechaniki Ośrodków Ciągłych
Instytut Mechaniki Budowli
Wydział Inżynierii Lądowej
Dynamika punktu materialnego

Część 1
Wprowadzenie
3
1.1. Ogólna klasyfikacja
MECHANIKA – dział fizyki poświęcony badaniu ruchów i stanów
równowagi ciał. Obejmuje statykę, kinematykę
i dynamikę
Kinematyka – dział mechaniki zajmujący się opisem ruchu
ciał bez uwzględnienia jego przyczyn oraz
cech fizycznych ciał.
Dynamika
– dział mechaniki badający ruch ciał
materialnych pod wpływem działających
na nie sił
Kinematyka – dział mechaniki zajmujący się opisem ruchu
ciał bez uwzględnienia jego przyczyn oraz
cech fizycznych ciał.
Statyka
– dział mechaniki badający prawa równowagi
ciał będących pod działaniem sił
Statyka
– dział mechaniki badający prawa równowagi
ciał będących pod działaniem sił
4
1.2. Założenia
Dynamika bazuje na aksjomatach mechaniki, które zostały
sformułowane na podstawie obserwacji zjawisk przyrodniczych:
1. aksjomat bezwładności
2. aksjomat ruchu
3. aksjomat akcji-reakcji
Siła, masa, czas - są pojęciami pierwotnymi
Masa punktu materialnego jest niezmienna w czasie ruchu
Siła w ogólnym przypadku może być funkcją czasu, położenia i
prędkości
5
Prawo ruchu punktu materialnego można zapisać na
podstawie II zasady
dynamiki w postaci wektorowej:
mr F
=
&&
1.3. Równania ruchu punktu materialnego poddanego działaniu siły
Można je sprowadzić do trzech równań skalarnych:
(
)
(
)
(
)
x
y
z
mx F x,y,z,x,y,z,t
my F x,y,z,x,y,z,t
mz F x,y,z,x,y,z,t
=
=
=
&&
&&&
&&
&&&
&&
&&
&
( )
(
)
( )
(
)
( )
(
)
x
y
z
x
f x,y,z,x,y,z,t
y
f x,y,z,x,y,z,t
z
f x,y,z,x,y,z,t
=
=
=
g
g
g
&
&&&
&
&&&
&&
&
&

6
( )
(
)
( )
(
)
( )
(
)
x
y
z
x
f x,y,z,x,y,z,t
y
f x,y,z,x,y,z,t
z
f x,y,z,x,y,z,t
=
=
=
g
g
g
&
&&&
&
&&&
&&
&
&
(
)
(
)
(
)
x
x
y
y
z
z
φ x,y,z,x,y,z,t
C
φ x,y,z,x,y,z,t
C
φ x,y,z,x,y,z,t
C
=
=
=
&&&
&&&
&&&
Wyznaczenie całek pierwszych równań ruchu
(
)
(
)
(
)
x
x
y
z
y
x
y
z
z
x
y
z
xν x,y,z,C ,C ,C ,t
yν x,y,z,C ,C ,C ,t
zν x,y,z,C ,C ,C ,t
=
=
=
&
&
&
(
)
(
)
(
)
x
x
y
z
x
y
x
y
z
y
z
x
y
z
z
ψ x,y,z,C ,C ,C ,t
D
ψ x,y,z,C ,C ,C ,t
D
ψ x,y,z,C ,C ,C ,t
D
=
=
=
Wyznaczenie całek drugich równań ruchu
7
(
)
(
)
(
)
x
y
z
x
y
z
x
y
z
x
y
z
x
y
z
x
y
z
x x C ,C ,C ,D ,D ,D ,t
y y C ,C ,C ,D ,D ,D ,t
z z C ,C ,C ,D ,D ,D ,t
=
=
=
(
)
(
)
(
)
(
)
(
)
(
)
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
x
y
z
x
y
z
x
y
z
x
x
y
z
x
y
z
x
y
z
y
x
y
z
x
y
z
x
y
z
z
x C ,C ,C ,D ,D ,D ,t
x ,
x x ,y ,z ,C ,C ,C ,t
v
y C ,C ,C ,D ,D ,D ,t
y ,
y x ,y ,z ,C ,C ,C ,t
v
z C ,C ,C ,D ,D ,D ,t
z ,
z x ,y ,z ,C ,C ,C ,t
v
=
=
=
=
=
=
&
&
&
x
y
z
x
y
z
ˆ ˆ ˆ
C , C , C
ˆ ˆ
ˆ
D , D , D
- rozwiązanie ogólne równań ruchu
Warunki początkowe (lub brzegowe)
(
)
(
)
(
)
x
y
z
x
y
z
x
y
z
x
y
z
x
y
z
x
y
z
ˆ ˆ ˆ ˆ ˆ ˆ
x x C ,C ,C ,D ,D ,D ,t
ˆ ˆ ˆ ˆ ˆ ˆ
y y C ,C ,C ,D ,D ,D ,t
ˆ ˆ ˆ ˆ ˆ ˆ
z z C ,C ,C ,D ,D ,D ,t
=
=
=
- rozwiązanie szczególne równań ruchu
Całki drugie po przekształceniach
8
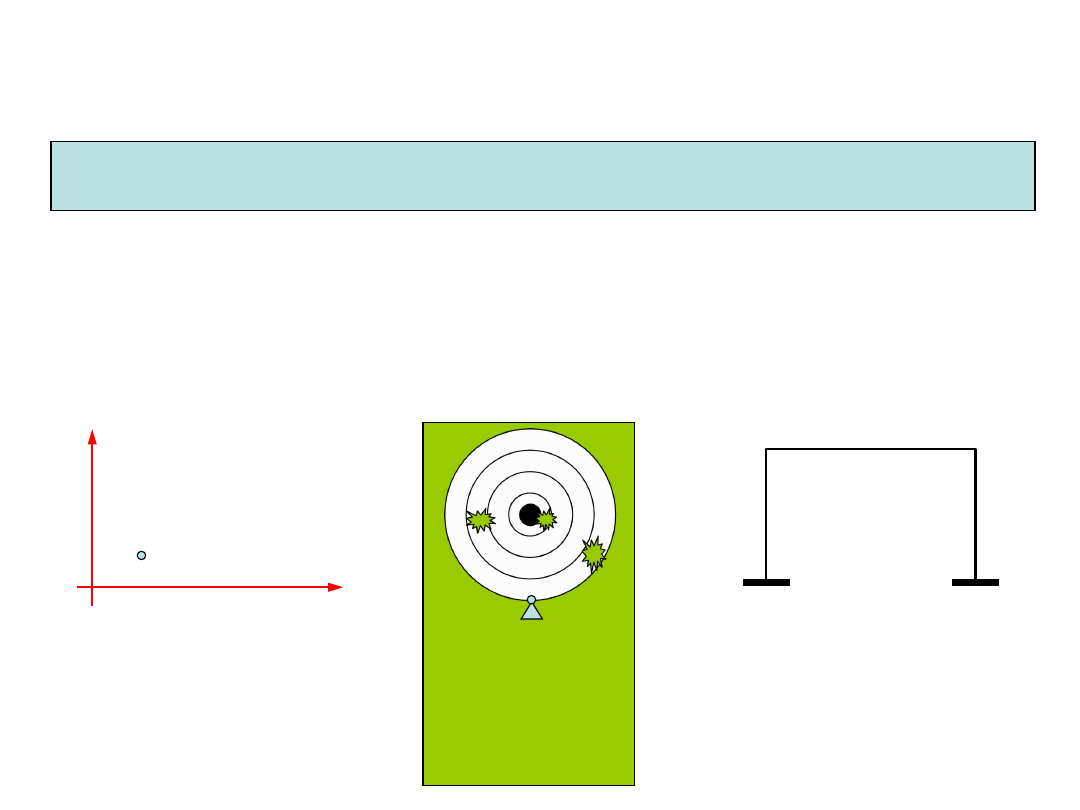
1.4. Stopnie dynamicznej swobody
Liczba stopni swobody – liczba niezależnych parametrów opisujących
położenie lub konfigurację układu materialnego.
Przykłady z zakresu statyki bryły sztywnej
Punkt materialny na
płaszczyźnie posiada
2 stopnie swobody
(
)
x,y
y
x
Rama statycznie
niewyznaczalna
ma 0 stopni
swobody
Tarcza podparta
w jednym punkcie
ma 1 stopień
swobody
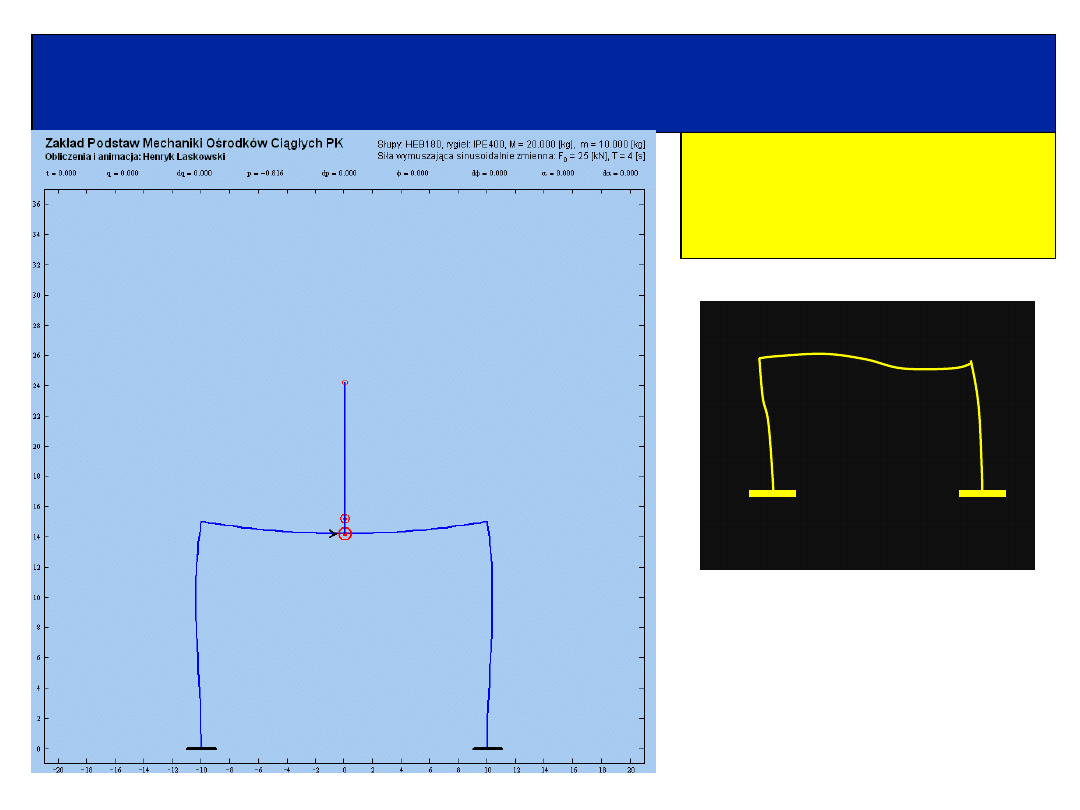
9
W problemach dynamiki
wprowadza się pojęcie
liczby stopni dynamicznej
swobody.
Rama w dynamice ma
nieskończenie wiele
stopni swobody
Rzeczywiste obiekty są ciałami odkształcalnymi. Wyznaczaniem ich ruchu
pod wpływem obciążeń zmiennych w czasie zajmuje się dynamika
konstrukcji
10
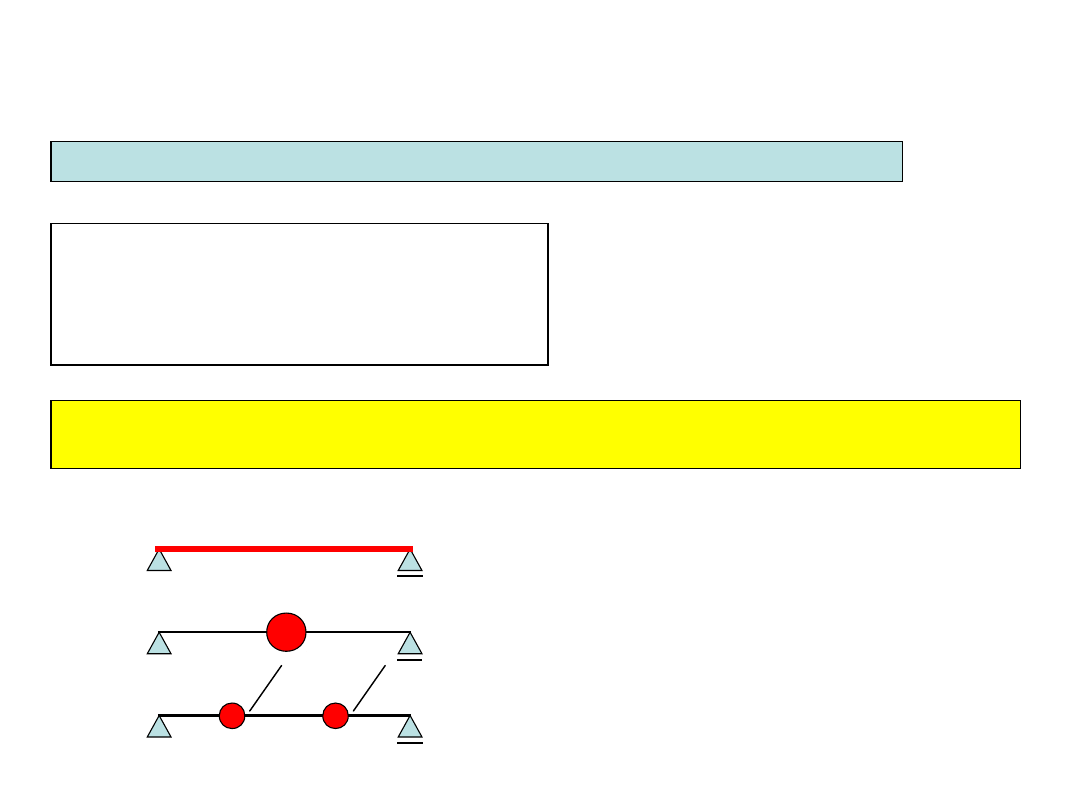
1.5. Metody dyskretyzacji
Dyskretyzacja – redukcja liczby stopni dynamicznej swobody (sds)
Metody:
– metoda mas skupionych
– metoda współrzędnych uogólnionych
– metoda elementów skończonych
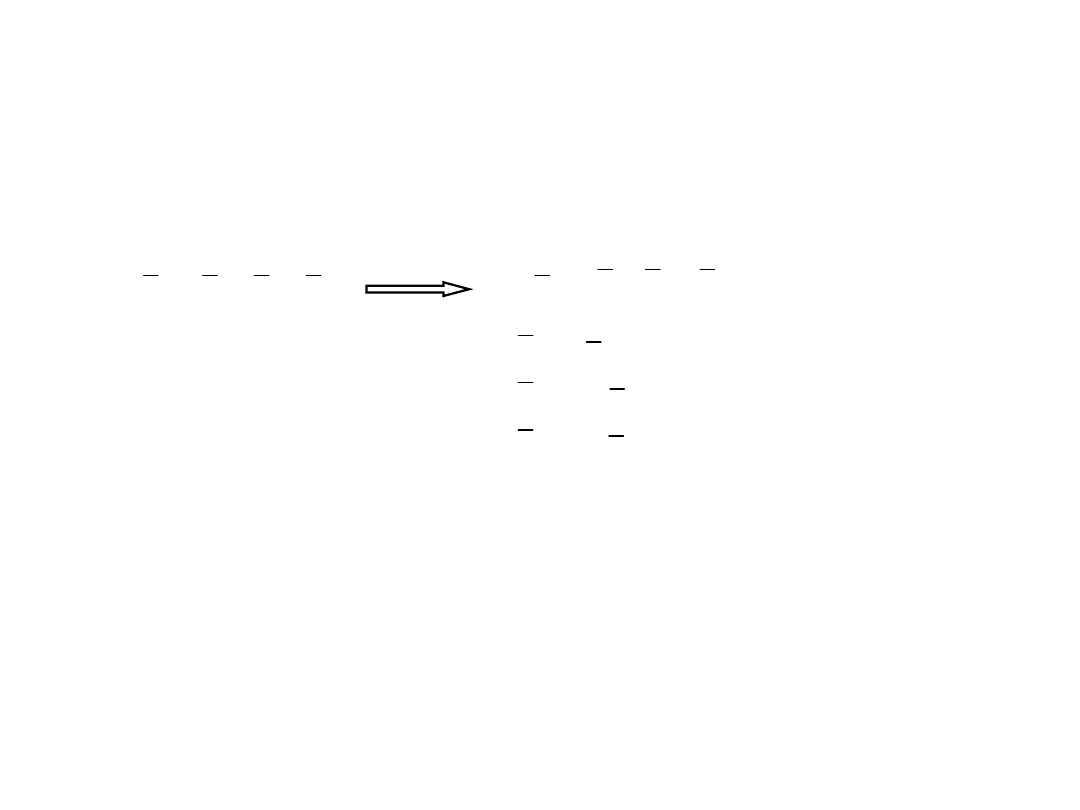
Metoda mas skupionych polega na zastąpieniu masy rozłożonej w sposób
ciągły zbiorem mas skupionych
belka z ciągłym rozkładem masy
(układ o nieskończonej liczbie sds)
belka z masą skupioną w jednym
punkcie
(układ o jednym sds)
belka z masą skupioną w dwóch
punktach
(układ o dwóch sds)
m
m
2
m
2
m
11
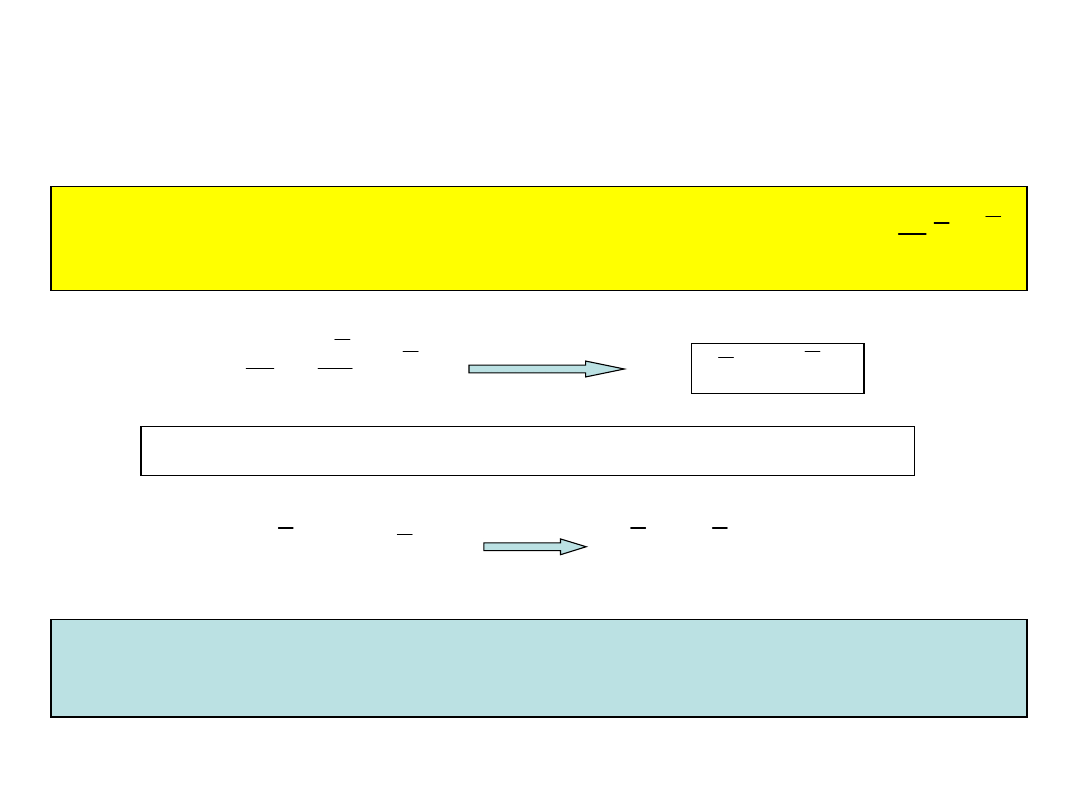
Metoda współrzędnych uogólnionych polega na opisie przemieszczeń
konstrukcji traktowanej jako układ ciągły za pomocą nieskończonego szeregu
postaci:
( )
( ) ( )
1
i
i
i
w x,t
v x q t
�
=
=
�
( )
w x,t
( )
i
v x
( )
i
q t
– funkcja przemieszczeń
– funkcje kształtu
– współrzędne uogólnione
W ww. szeregu uwzględnia się kilka pierwszych wyrazów i tym samym
dokonuje się redukcji liczby stopni dynamicznej swobody
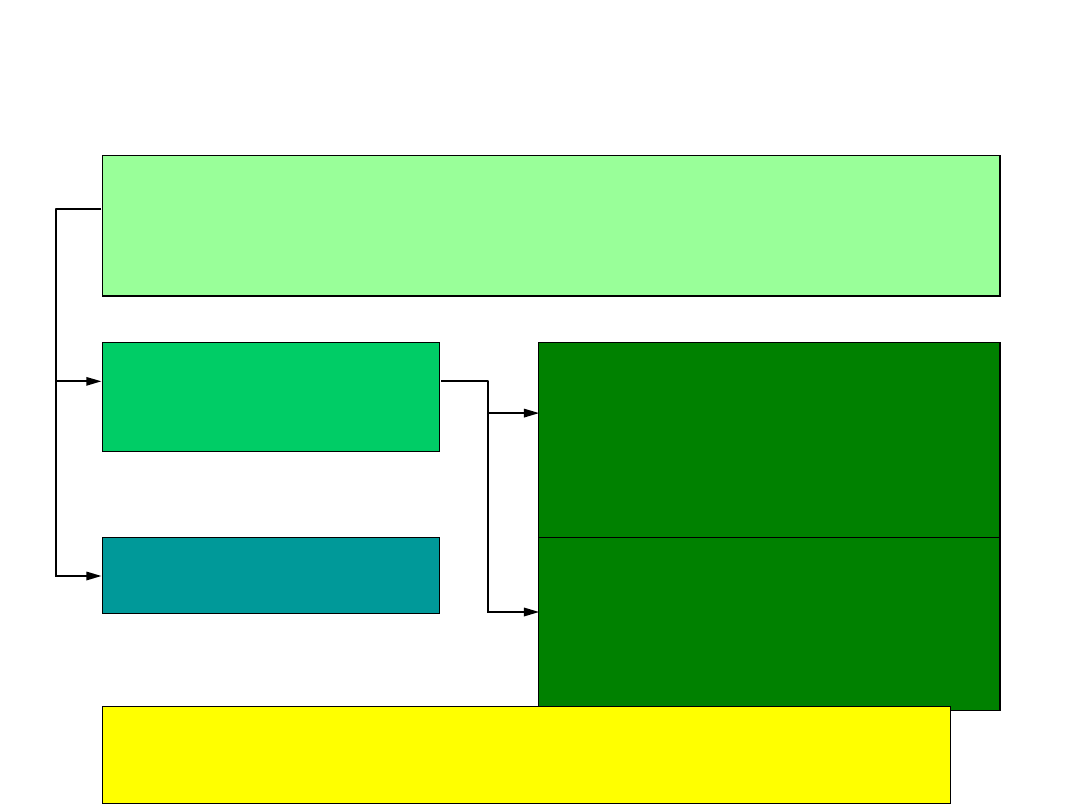
W metodzie elementów skończonych dzieli się obiekt na elementy
skończone i opisuje się przemieszczenia wewnątrz każdego elementu
za pomocą funkcji:
( )
( ) ( )
4
1
i
i
i
w x,t
N x q t
=
=
�
( )
w x,t
( )
i
N x
( )
i
q t
– funkcja przemieszczeń wewnątrz
elementu
– funkcje kształtu
– przemieszczenia węzłowe
elementy skończone
węzły
( )
1
q t
( )
2
q t
( )
3
q t
( )
4
q t
( )
w x,t

Część 2
Siły działające na obiekty
13
2.1. Siły
zewnętrzne
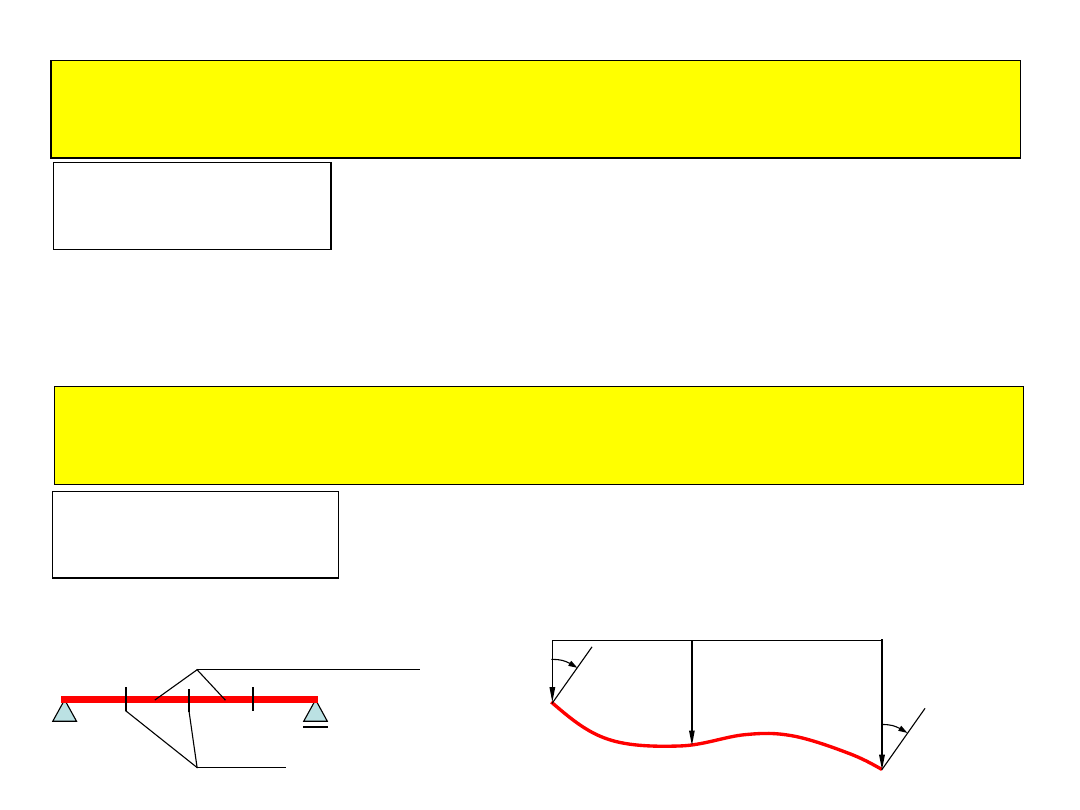
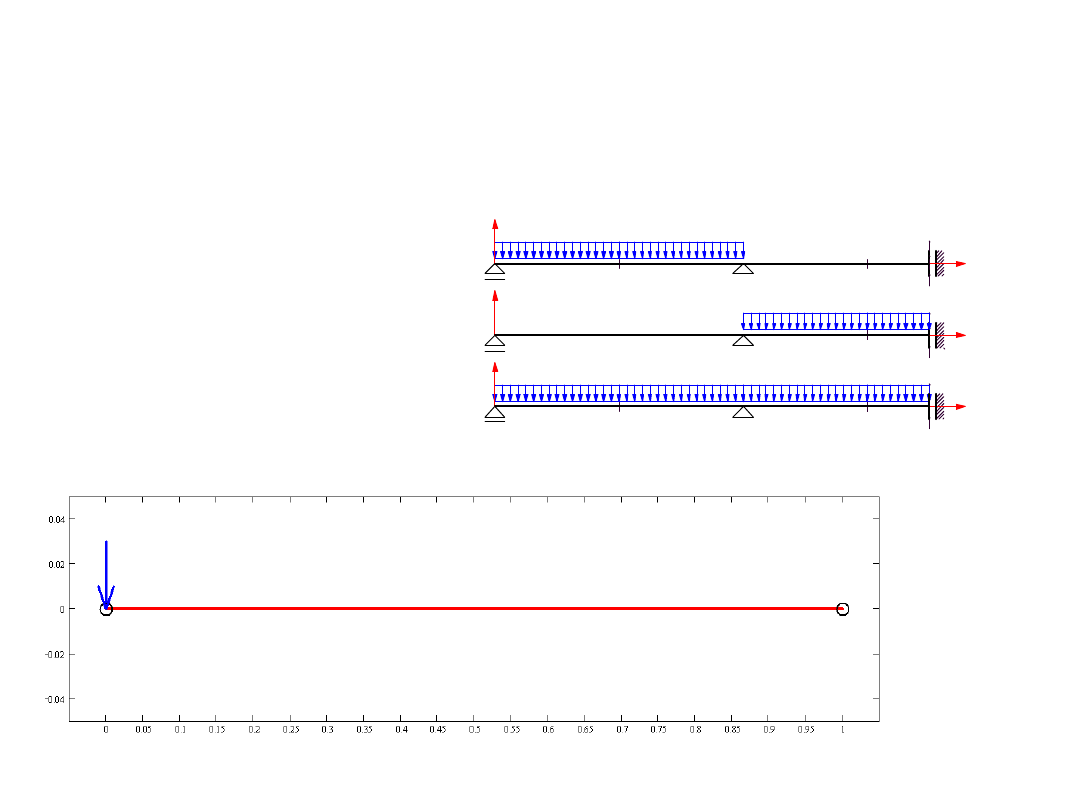
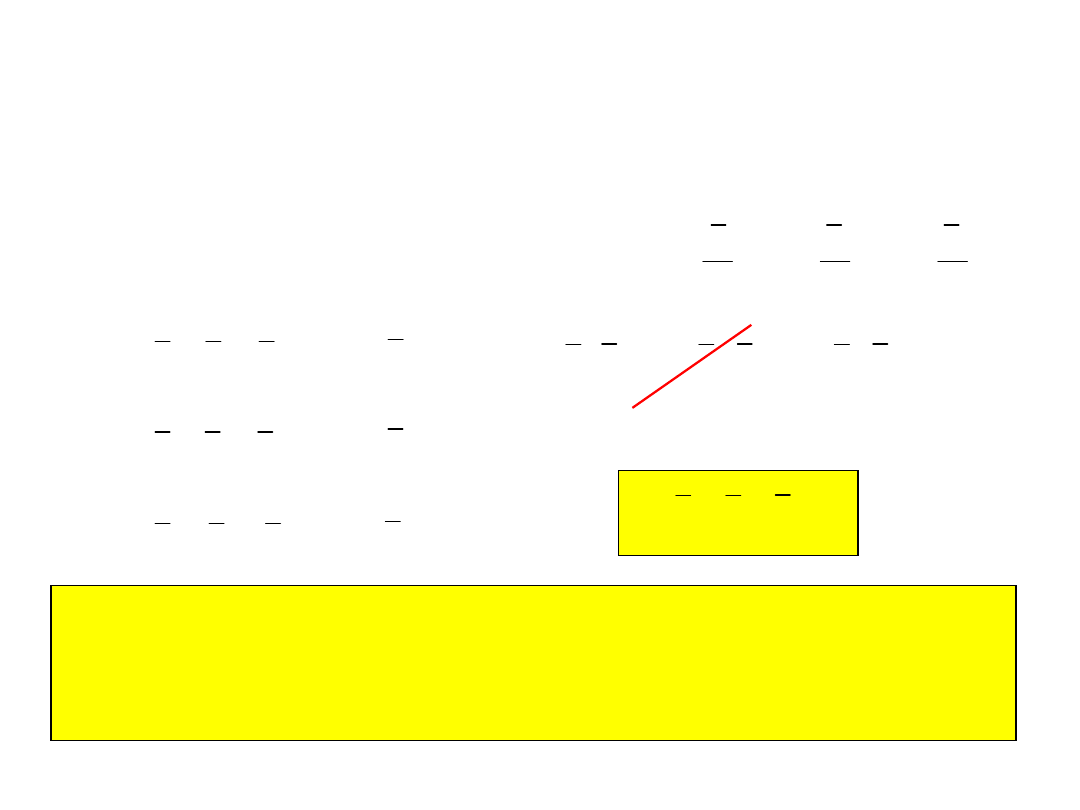
Obciążenia statyczne to obciążenia niezmienne w czasie lub
zmieniające się na tyle wolno, że nie wywołują drgań:
- obciążenia ciężarem własnym
- obciążenia użytkowe stałe
- obciążenia użytkowe zmienne
z
z
x
z
x
x
1
5
3
1
5
3
2
4
Obciążenie w przęsłach 1 i 3
1
5
3
2
4
2
4
Obciążenie w przęsłach 1 i 2
Obciążenie w przęśle 2
Przykład obciążeń użytkowych
zmiennych nie wywołujących
drgań
Przykład obciążenia ruchomego nie wywołującego
drgań
14
Obciążenia dynamiczne charakteryzuje szybka zmienność w czasie. Efektem
obciążeń dynamicznych są drgania obiektu.
- obciążenia wiatrem,
- obciążenia kinematyczne w trakcie trzęsienia ziemi,
- obciążenia dynamiczne związane z działalnością człowieka (ruch pojazdów,
praca maszyn itp.),
- obciążenia wyjątkowe o charakterze dynamicznym.
Autor: Paweł Szeptyński – student IV roku TKI (Studenckie Koło Naukowe Mechaniki Budowli)
15
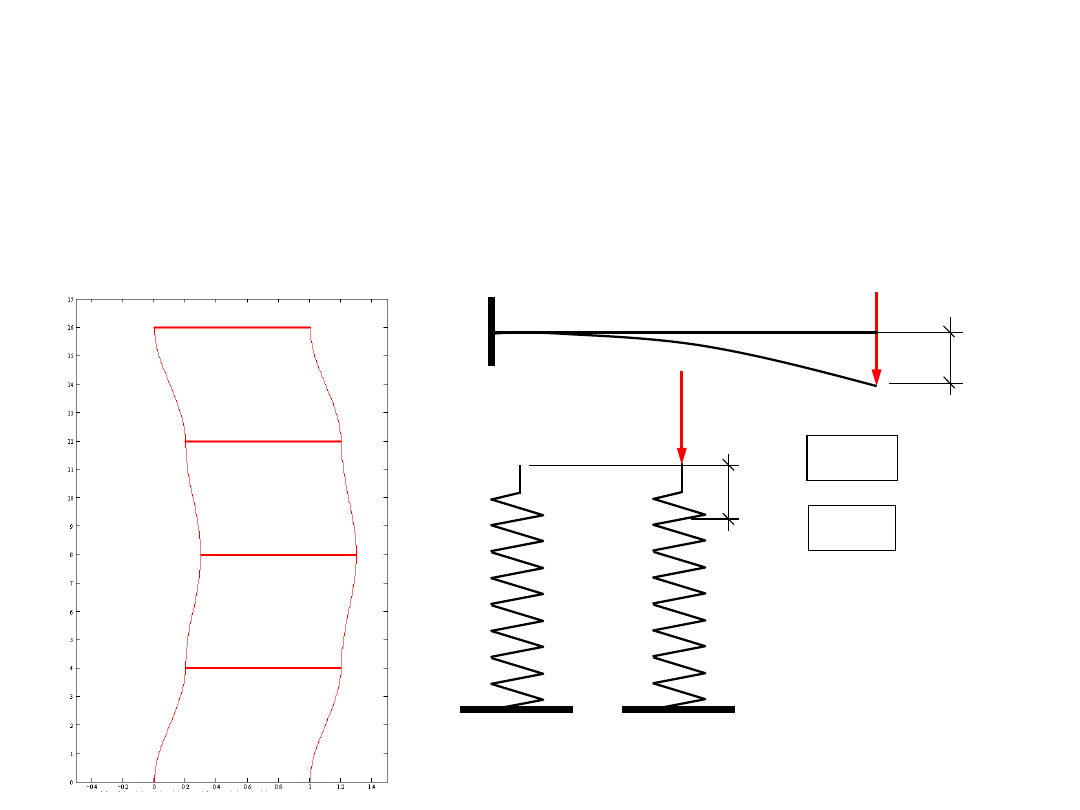
2.2. Siły sprężystego
oddziaływania
Obiekt pod wpływem obciążeń zewnętrznych ulega odkształceniu, które wiąże
się z powstawaniem sił wewnętrznych. Odkształcenia mogą być plastyczne lub
sprężyste. W dynamice przyjmuje się, że konstrukcja pod działaniem obciążeń
dynamicznych odkształca się sprężyście.
P
q
P
q
P kq
=
qδP
=
k
– współczynnik
sztywności
– współczynnik
podatności
Model więzów sprężystych
16
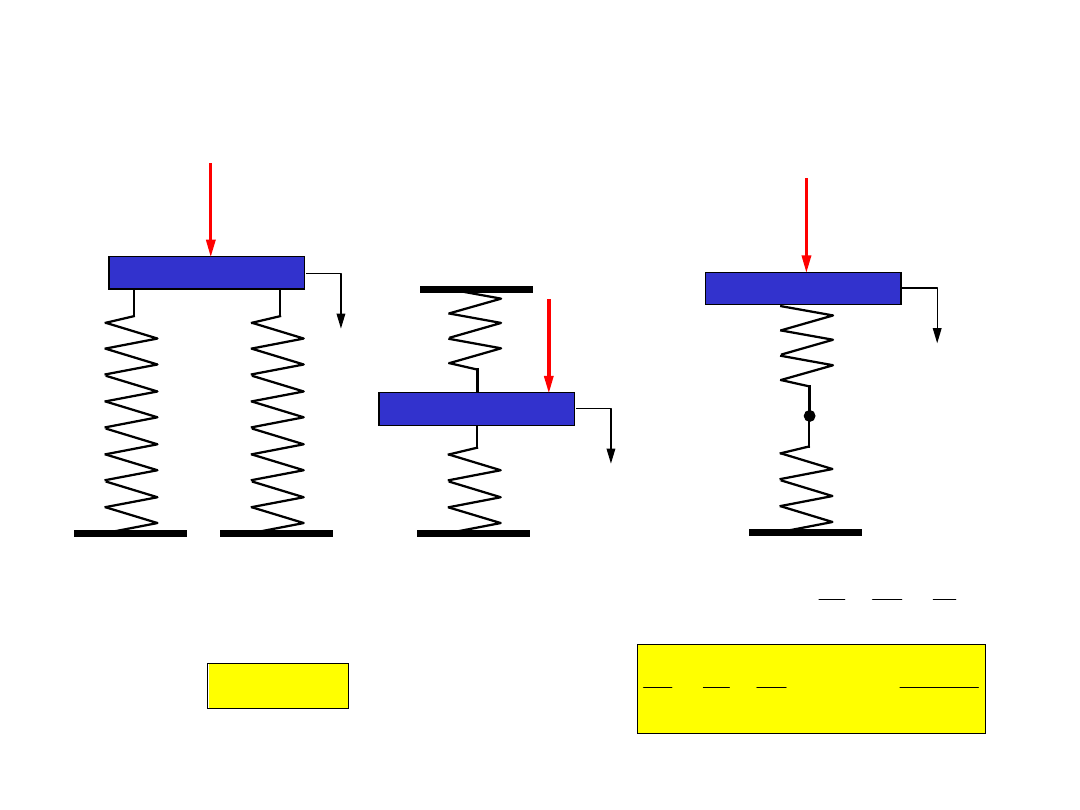
Zastępcze współczynniki
sztywności
1
k
2
k
P
q
1
k
2
k
P
q
1
k
2
k
P
q
(
)
1
2
1
2
1
2
P P P
k q k q
k k q
= + =
+
=
+
1
2
z
k
k k
= +
1
2
1
2
P
P
P
q q q
k
k
k
= + = +
=
1 2
1
2
1
2
1
1
1
z
z
kk
k
k
k
k
k k
= +
�
=
+
Równoległe połączenie sprężyn
Szeregowe połączenie sprężyn
17
2.3. Siły bezwładności
Siły bezwładności (siły d’Alemberta) występują wyłącznie w zagadnieniach
dynamiki.
Siły bezwładności mają zawsze zwrot przeciwny do zwrotu przyspieszenia,
jakiego doznaje punkt materialny.
Pozorne siły bezwładności rzeczywiście działają na ciała materialne
w układach nieinercjalnych. Siły te można mierzyć za pomocą
dynamometrów.
u
u
F
ma
=-
w
b
u
c
a
a
a
a
= -
-
w
u
c
ma
F F
F
= + +
c
c
F
ma
=-
b
F ma
=
- siła bezwładności Coriolisa
- siła rzeczywista
- siła bezwładności unoszenia
18
Tarcie wewnętrzne to całość zjawisk fizycznych
towarzyszących przemieszczaniu się względem siebie
elementów tego samego ciała i powodujących
rozpraszanie energii podczas ruchu. (Inaczej: tłumienie)
Tłumienie materiałowe
wywołane procesami
zachodzącymi w siatce
krystalicznej i w warstwie
międzykry-stalicznej. (tłumienie
konstrukcyjne)
Tarcie konstrukcyjne
polegające na rozpraszaniu
energii na powierzchniach styku
pomiędzy elementami
konstrukcyjnymi
Tarcie wewnętrzne
w ciałach
stałych
Tarcie wewnętrzne
w cieczach
2.4. Siły tłumienia, podstawowy model
tłumienia
Uwaga: Siła tarcia (tłumienia) występująca podczas ruchu ciała jest
siłą zewnętrzną czynną – jest oporem rozpraszającym energię
układu
19
Podstawowy model tarcia wewnętrznego - tłumienie
wiskotyczne
Wartość siły oporu wiskotycznego jest proporcjonalna do
prędkości a jej zwrot jest przeciwny do zwrotu wektora prędkości
R
( )
r t
&
R
r c
=- �
&
c
- współczynnik tłumienia
cαm
=
- współczynnik tłumienia w modelu, w którym zakłada się,
że tłumienie jest proporcjonalne do pędu masy
(w procesie tłumienia dominujący jest wpływ środowiska)
cβk
=
- współczynnik tłumienia w modelu, w którym zakłada się,
że tłumienie jest proporcjonalne do sztywności układu
(w procesie tłumienia dominujące znaczenie mają zjawiska
zachodzące w strukturze materiału konstrukcyjnego)
cαm
βk
=
+
- w kombinowanym wariancie tłumienia
wiskotycznego (model tłumienia Rayleigha)

Część 3
Równanie ruchu układu o jednym stopniu swobody
21
3.1. Druga zasada dynamiki Newtona w odniesieniu do
punktu
materialnego i zasada d’Alemberta
d
dr
m
F
dt
dt
�
�=
�
�
�
�
Aksjomat ruchu: Istnieją układy odniesienia, w których, jeżeli
na punkt materialny działa siła, to zmienia jego pęd według
prawa:
d
p F
dt
=
m const
=
( )
( )
mr t
F t
=
&&
( )
( )
x
x
mq t
F t
=
&&
( )
( )
y
y
mq t
F t
=
&&
( )
( )
z
z
mq t
F t
=
&&
( )
( )
B t
mr t
=- &&
( )
( )
0
F t
B t
+
=
Zasada d’Alemberta: W dowolnym położeniu punktu materialnego będącego
w ruchu suma sił czynnych i sił bezwładności jest równa 0.
22
3.2. Zasada d’Alemberta w odniesieniu do układu
punktów
1. Układ punktów materialnych jest ograniczony więzami geometrycznymi,
stacjonarnymi, dwustronnymi i gładkimi.
2. Na układ punktów materialnych działają
układy sił czynnych, reakcji i sił bezwładności:
i
i
i
i
i
i
F
R
B
,
,
A
A
A
� �
� �
� �
� �
� �
� �
���
1
1
1
0
0
0
i
i
i
n
n
n
F R B
F R B
F
R
B
� + + =
�
���
�
� + + =
�
����
�
� + + =
�
1
S
/δ
Si
/δ
Sn
/δ
1
1
1
0
n
n
n
i
Si
i
Si
i
Si
i
i
i
Fδ
R δ
B δ
=
=
=
� +
� +
� =
�
�
�
(
)
1
0
n
i
i
Si
i
F Bδ
=
+
� =
�
Założenia:
Zasada d’Alemberta w odniesieniu do układu punktów materialnych:
Spośród wszystkich możliwych ruchów układu punktów materialnych
poddanego działaniu więzów geometrycznych, stacjonarnych, dwustronnych i
gładkich tylko ten jest możliwy, w którym suma prac sił czynnych i
bezwładności na przemieszczeniach wirtualnych jest równa 0.
23
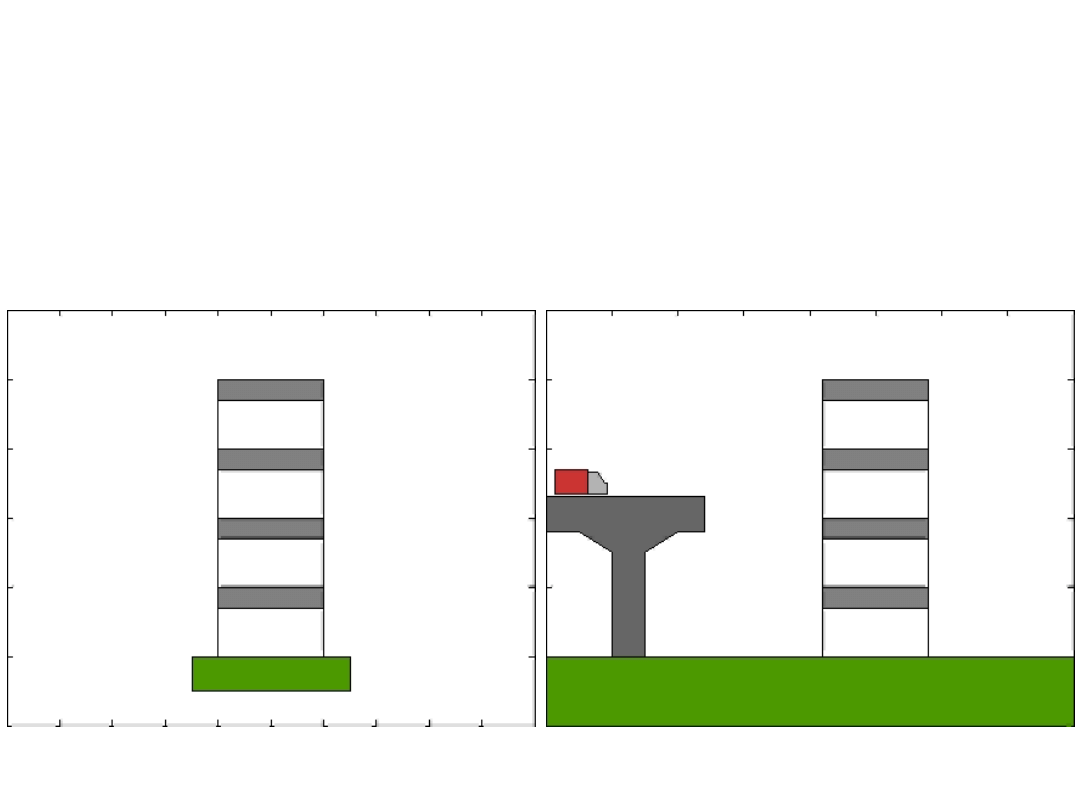
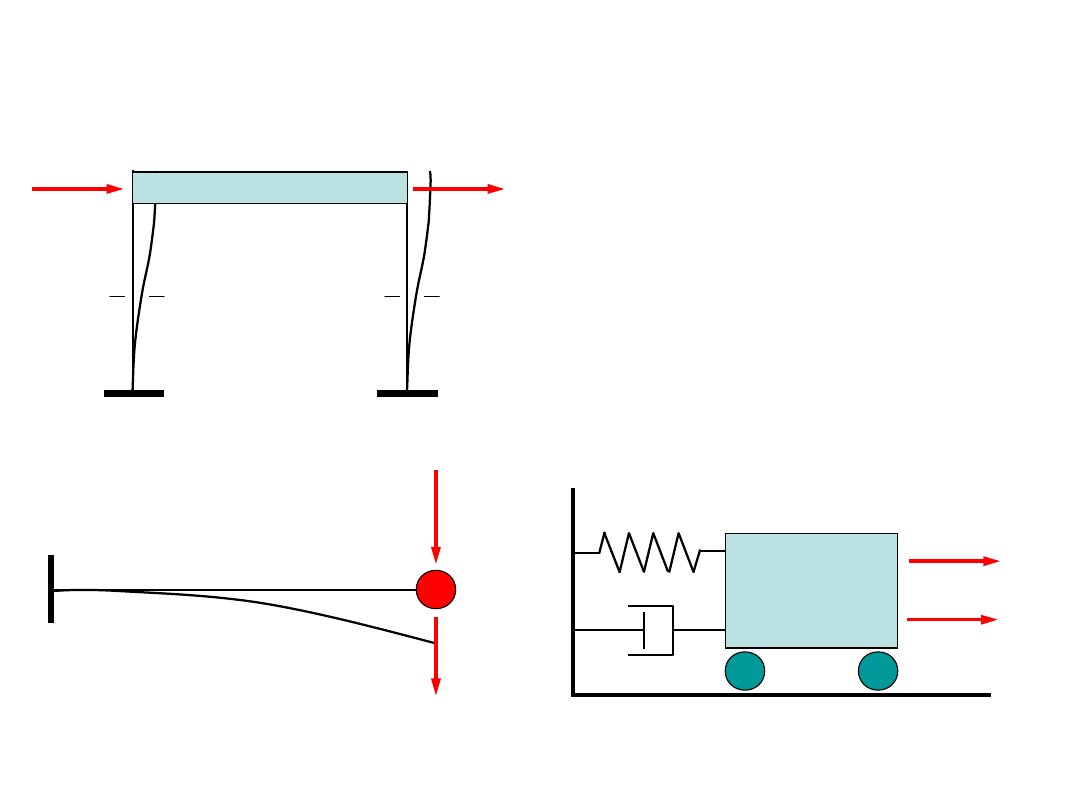
3.3. Obiekty o jednym stopniu dynamicznej swobody
( )
P t
( )
q t
2
k
2
k
m
Założenia:
1. Nieskończona sztywność
kondygnacji
2. Nieskończona sztywność
podłużna słupów
3. Małe, w odniesieniu do
wysokości słupów, wychylenia
masy.
Rama płaska ze sztywnym
ryglem
Wspornik z masą skupioną na
końcu
( )
P t
m
( )
q t
k, c
m
k
c
( )
P t
( )
q t
Model układu o jednym stopniu
swobody
2
c
2
c
24
( )
P t
( )
q t
m
Q
2
N
1
N
2
M
1
M
( )
2
k
q t
( )
2
k
q t
( )
2
c
q t
&
( )
2
c
q t
&
( )
mq t
&&
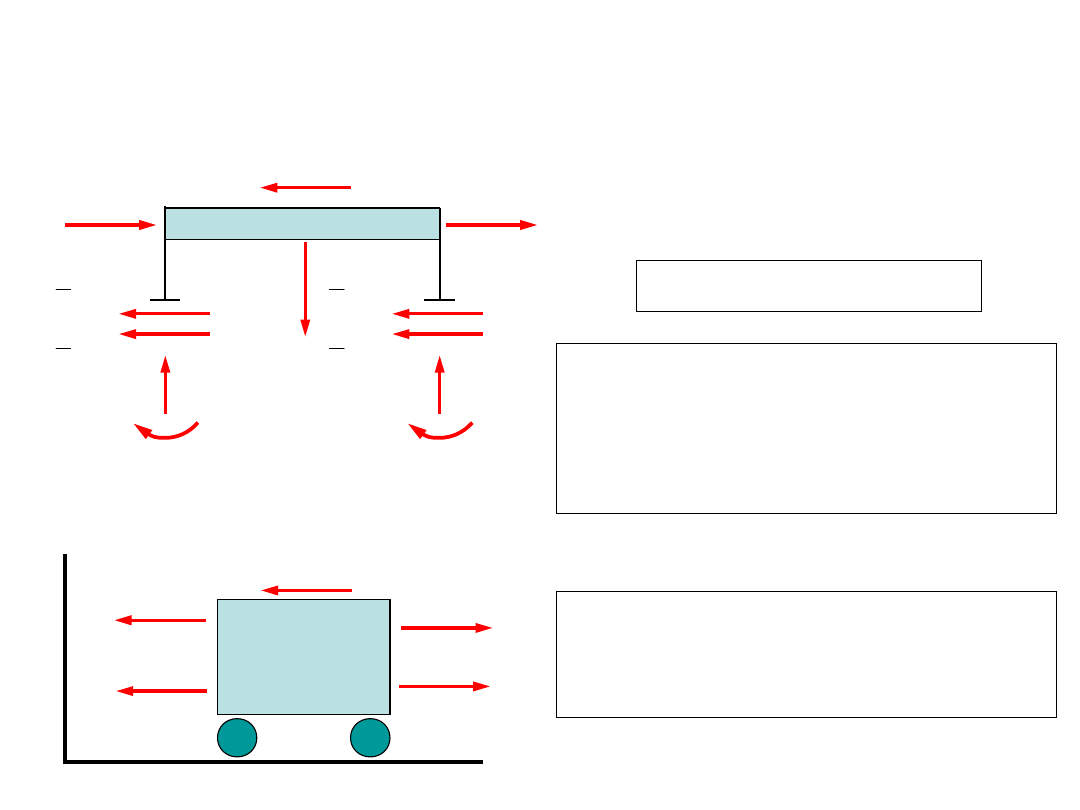
3.4. Konstrukcja równań ruchu
Myślowo wyizolowany rygiel ramy
płaskiej
Na podstawie zasady d’Alemberta:
( )
( )
( )
( )
mq t
cq t
kq t
P t
+
+
=
&&
&
m
( )
P t
( )
q t
( )
mq t
&&
( )
kq t
( )
cq t
&
Równanie ruchu układu materialnego
o jednym stopniu dynamicznej
swobody.
(Równanie różniczkowe niejednorodne
drugiego rzędu)
Równanie ruchu ma postać równania
równowagi sił na kierunku ruchu. Siły
N i M spełniają dwa pozostałe równania
równowagi.
Myślowo wyizolowana masa z
modelu układu o jednym stopniu
swobody
( )
( )
0
0
0
0
q
q , q
v
=
=
&
Warunki brzegowe :
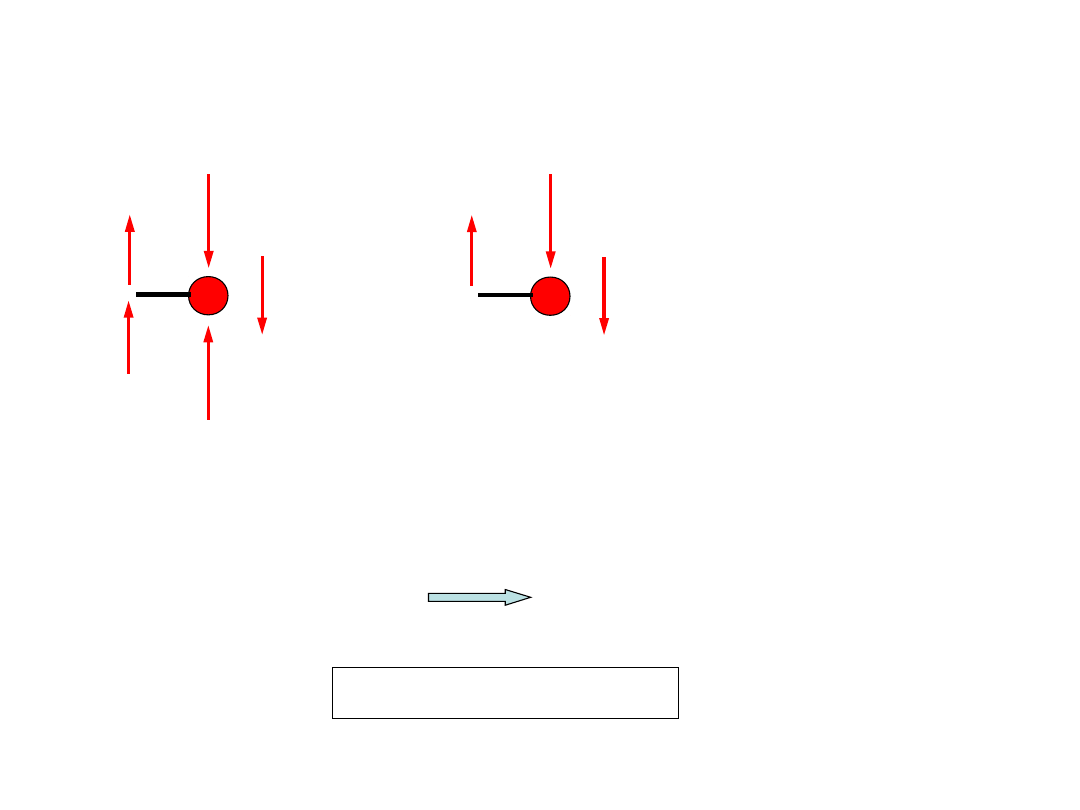
25
( )
P t
%
( )
q t
%
m
( )
kq t
%
( )
cq t
&
%
( )
mq t
&&
%
st
P
st
q
m
st
kq
Myślowo wyizolowana masa skupiona
wspornika:
w ruchu
w położeniu równowagi statycznej
( )
( )
st
P t
P t
P
=
+
%
( )
( )
st
q t
q t
q
=
+
%
Równanie równowagi statycznej
st
st
kq
P
=
Równanie równowagi
dynamicznej
( )
( )
( )
( )
mq t
cq t
kq t
P t
+
+
=
&&
&
%
%
%
%
( )
( )
( )
(
)
( )
st
st
mq t
cq t
k q t
q
P t
P
+
+
+
=
+
&&
&
( )
( )
( )
( )
q t
q t
q t
q t
=
�
=
&
&&
%
&
%
&&
( )
( )
( )
( )
mq t
cq t
kq t
P t
+
+
=
&&
&
Document Outline
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Slide 22
- Slide 23
- Slide 24
- Slide 25
Wyszukiwarka
Podobne podstrony:
MT st w 13
MT st w 06
MT st w 02a
MT st w 06 [tryb zgodności]
cennik modemow i routera w ofercie Internetu CP ST 13 06 2011
MT st w 08 [tryb zgodności]
MT st w 02a 2
MT st w 10
MT st w 03
MT st w 04 cz1 [tryb zgodności]
MT st w 05 [tryb zgodności]
MT st w 15
MT st w 03
MT st w 04 cz2 [tryb zgodności]
MT st w 14
ST 13 specyfikacja techniczna wentylacja hybrydowa ETAP 1, TBS Wrocław Wojanowska, Etap I, ETAP I -
więcej podobnych podstron