„Dzi
ś
, jutro, pojutrze technologii satelitarnych”
Przygotowanie ekspertyzy cz
ą
stkowej wspomagaj
ą
cej prace
panelu nawigacji satelitarnej projektu Foresight pt.
„Obszary zastosowa
ń
nawigacji satelitarnej
w lotnictwie cywilnym”
Krzysztof Banaszek
20.11.2006
ICAO - GNSS
GNSS
GPS
GLONASS
Satellite
Based Augmentation System
(SBAS)
Aircraft Based
Augmentation System
(ABAS)
Ground Based
Augmentation System
(GBAS)
RAIM
Receiver Autonomous
Integrity Monitoring
Autonomiczne monitorowanie
integralności odbiornika
AAIM
Aircraft Autonomous
Integrity Monitoring
Autonomiczne monitorowanie
integralności statku powietrznego
GALILEO
(TBD)
ICAO – wymagania na system
•
Państwa – Sygnatariusze Konwencji ICAO (Międzynarodowej Organizacji Lotnictwa
Cywilnego) zobowiązane są zgodnie z Art. 37 i 38 stosować SARPs (Standardy i Zalecane
Praktyki) lub powiadomić o odstępstwach w zakresie SARPs.
•
W chwili obecnej w SARPs (Załącznik 10 Tom 1 do Konwencji ICAO) zdefiniowano
wymagania dla systemów GLONASS i GPS wykorzystujących częstotliwość L1.
Sygnał GPS L1 z z kodem C/A – Coarse Acquisition.
•
Ponadto ICAO zdefiniowała wymagania dla systemów ABAS (aircraft-based augmentation
system) i SBAS (satellite-based augmentation system) oraz GBAS (ground-based
augmentation system).
•
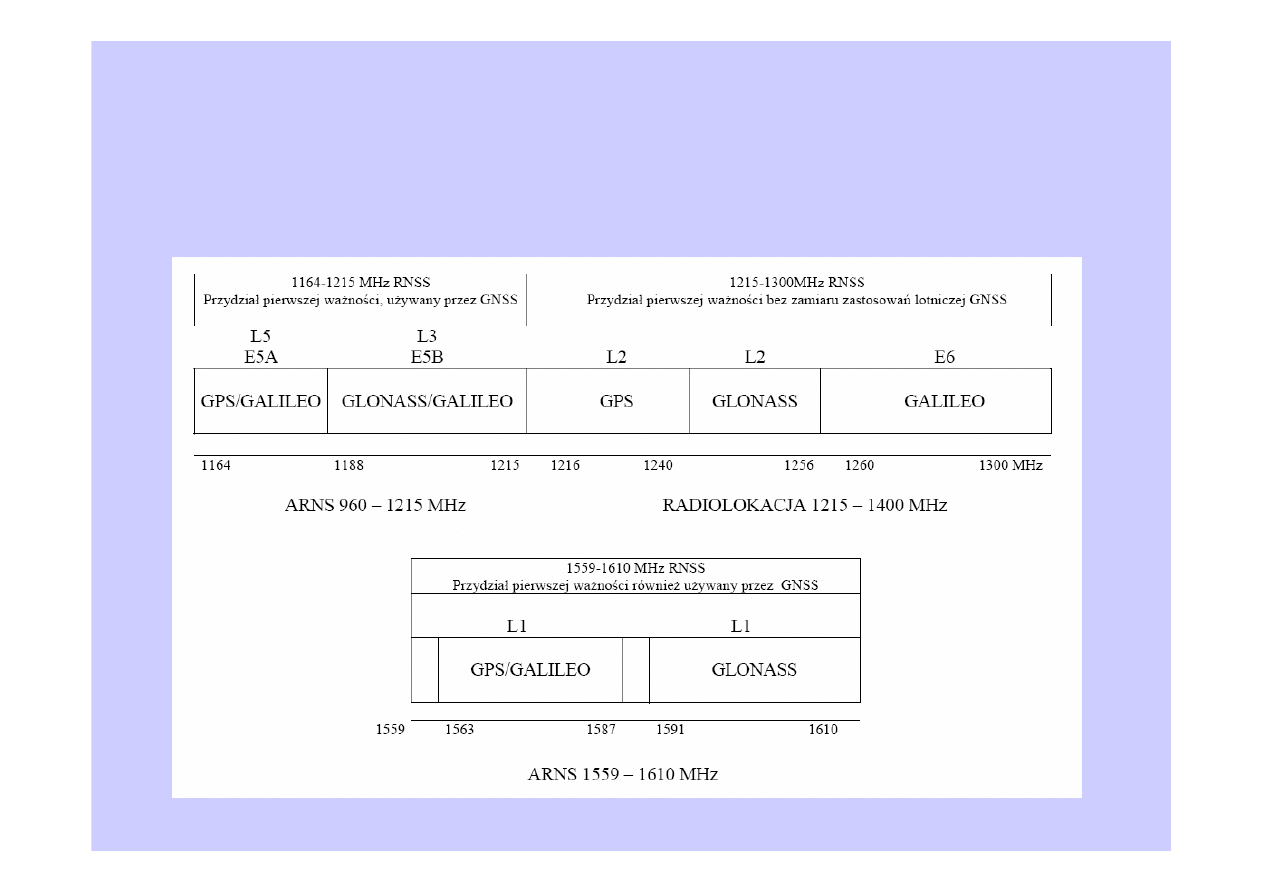
Przyszłe wymagania jakie definiowane będą dla zastosowań w lotnictwie cywilnym planuje
się na podstawie spodziewanego rozwoju infrastruktury:
–
b) GPS/L5: Wstępne możliwości operacyjne - 2012, Pełna funkcjonalność - 2015;
–
d) GLONASS/L3: zgłoszona dostępność od 2008;
–
e) Galileo/L1: zgłoszona dostępność od 2008 ;
–
f) Galileo/E5a: zgłoszona dostępność od 2008;
–
g) Galileo/E5b: zgłoszona dostępność od 2008.
•
Należy założyć, że w przypadku pojawienia się każdego nowego sygnału w przestrzeni
niezbędny jest okres od jednego do dwóch lat na ocenę i certyfikację sygnału do zastosowań
w lotnictwie cywilnym w ramach zastosowań specjalnych (tzw. safety-of-life applications).
ICAO – zastosowania
•
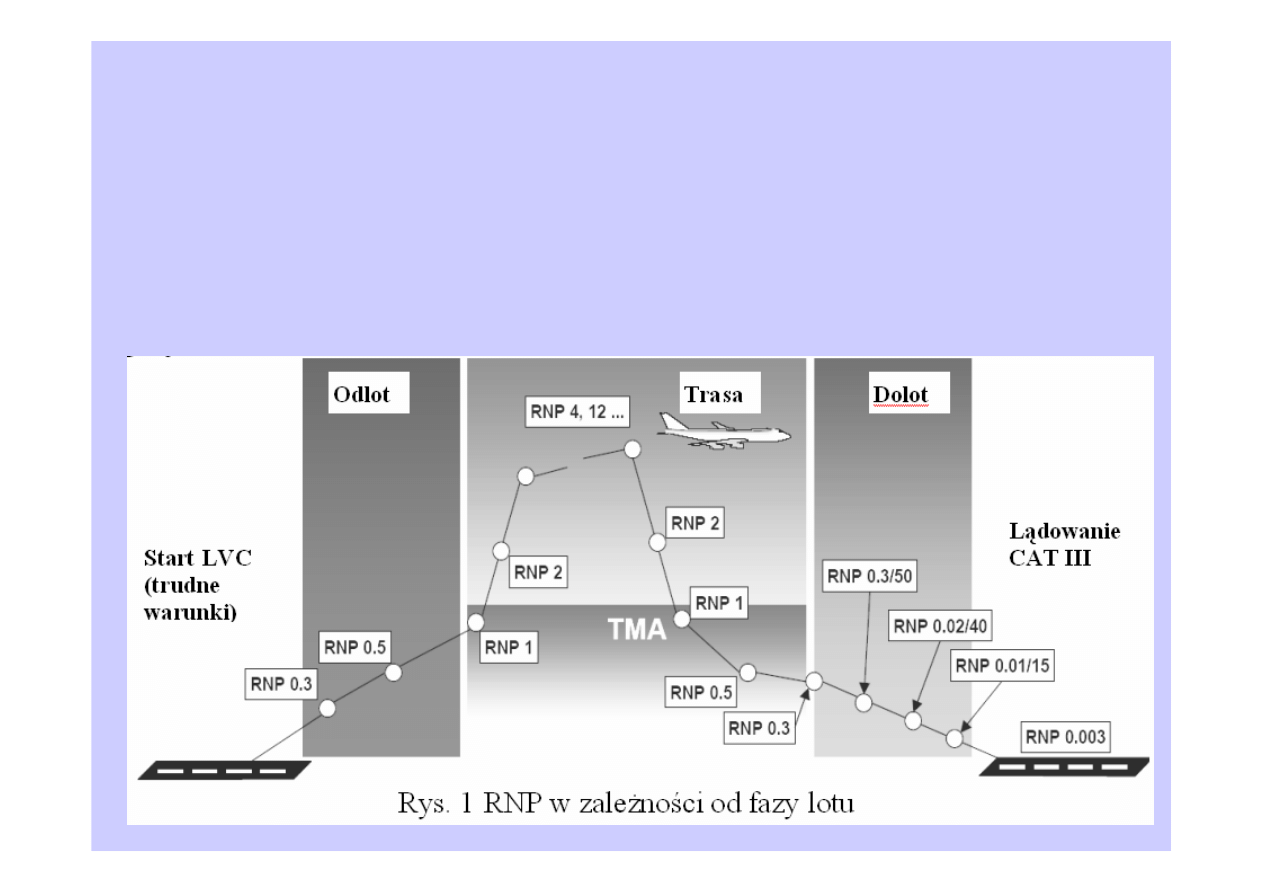
W zakresie faz lotu rozróżnia się: lot po trasie, lot w terminalu, podejścia początkowego,
podejście do lądowania oraz odlot po starcie.
•
Przez kilka ostatnich dziesięcioleci funkcjonowały zdefiniowane przez ICAO podejścia
nieprecyzyjne-NPA oraz podejścia precyzyjne-PA w kategoriach (CAT) I, II, III (a,b,c).
•
Podejścia nieprecyzyjne bazują na wykorzystaniu pomocy nawigacyjnych typu NDB,
VOR i DME. Podejścia precyzyjne bazują na wykorzystaniu systemów ILS, a ostatnio
na części lotnisk instalowane są systemy MLS.
•
W związku z pojawieniem się możliwości wykorzystania systemów GNSS (GPS,
GLONASS, SBAS, GBAS) w Zał. 6 ICAO zdefiniowano dwa dodatkowe typy podejść
z prowadzeniem pionowym APV (podejścia o wymaganiach „między” NPS i PA):
–
a) Baro-VNAV - podejścia wykorzystujące prowadzenie pionowe z wysokościomierza
barometrycznego wchodzącego w skład FMS (flight management system) samolotu
(rozwiązania wymaga zastosowania odpowiedniego komputera pokładowego)
–
b) APV I, APV II - podejścia wykorzystujące prowadzenie pionowe z systemu SBAS GNSS.
W obu przypadkach pozycja w płaszczyźnie poziomej wyznaczana jest przez odb. GNSS.
•
Ponadto zdefiniowano podeście precyzyjne CAT I GBAS z wykorzystaniem systemu
GNSS z naziemnym systemem wspomagającym – trwają prace nad certyfikacją tego
typu systemów (np. LAAS w USA).
•
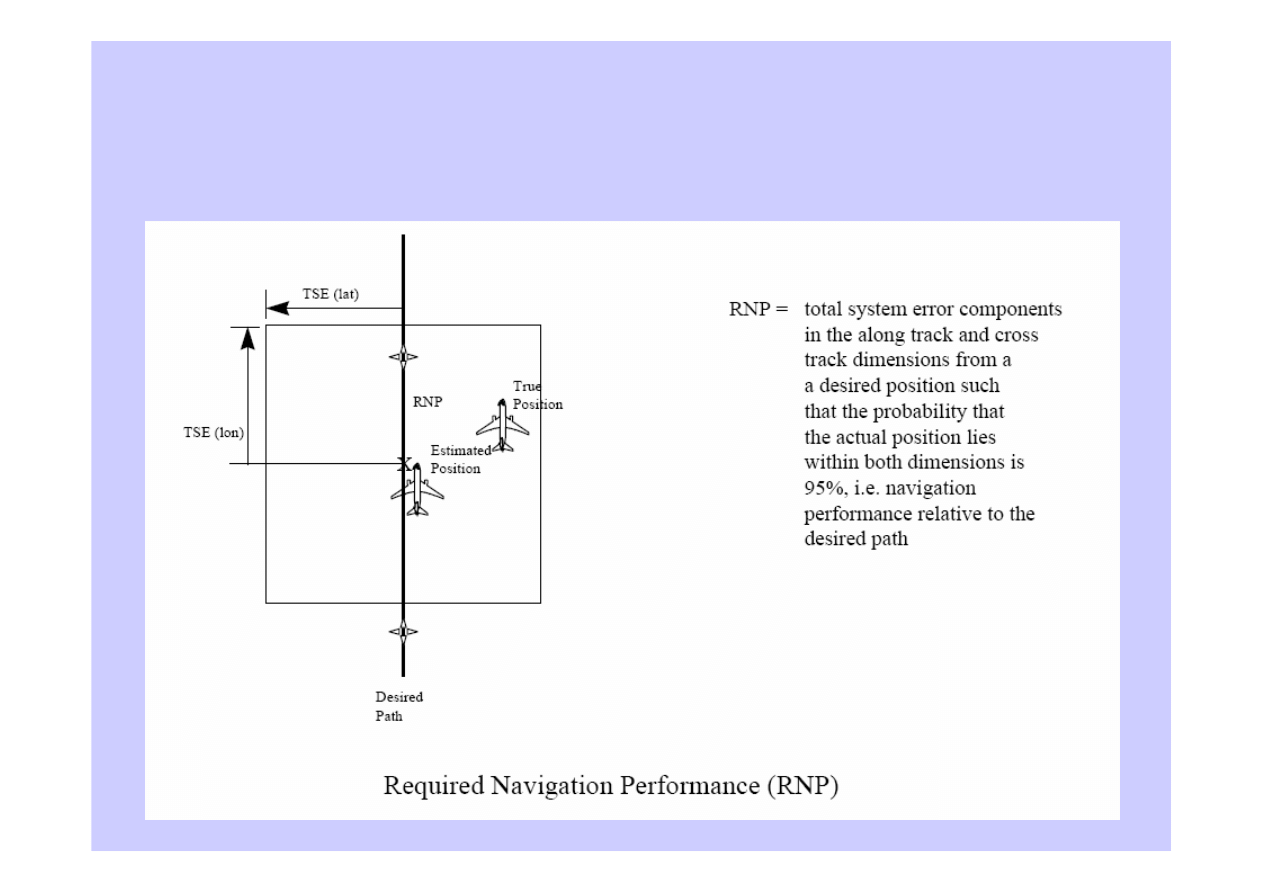
W latach 90-tych XX wieku całość wymagań nawigacyjnych oparto o koncepcję RNP
(Required Navigation Performance) definiowanych dla różnych faz lotu, która
„uniezależnia” nawigację od fizycznej lokalizacji urządzeń/systemów.
Przepisy ICAO - RNP
•
Dokumenty ICAO:
•
Rezolucje Rady ICAO:(A31-6, A32-19, A32-20)
•
Załączniki do Konwencji Chicago: 2, 4, 6, 10, 11, 14, 15
RNP
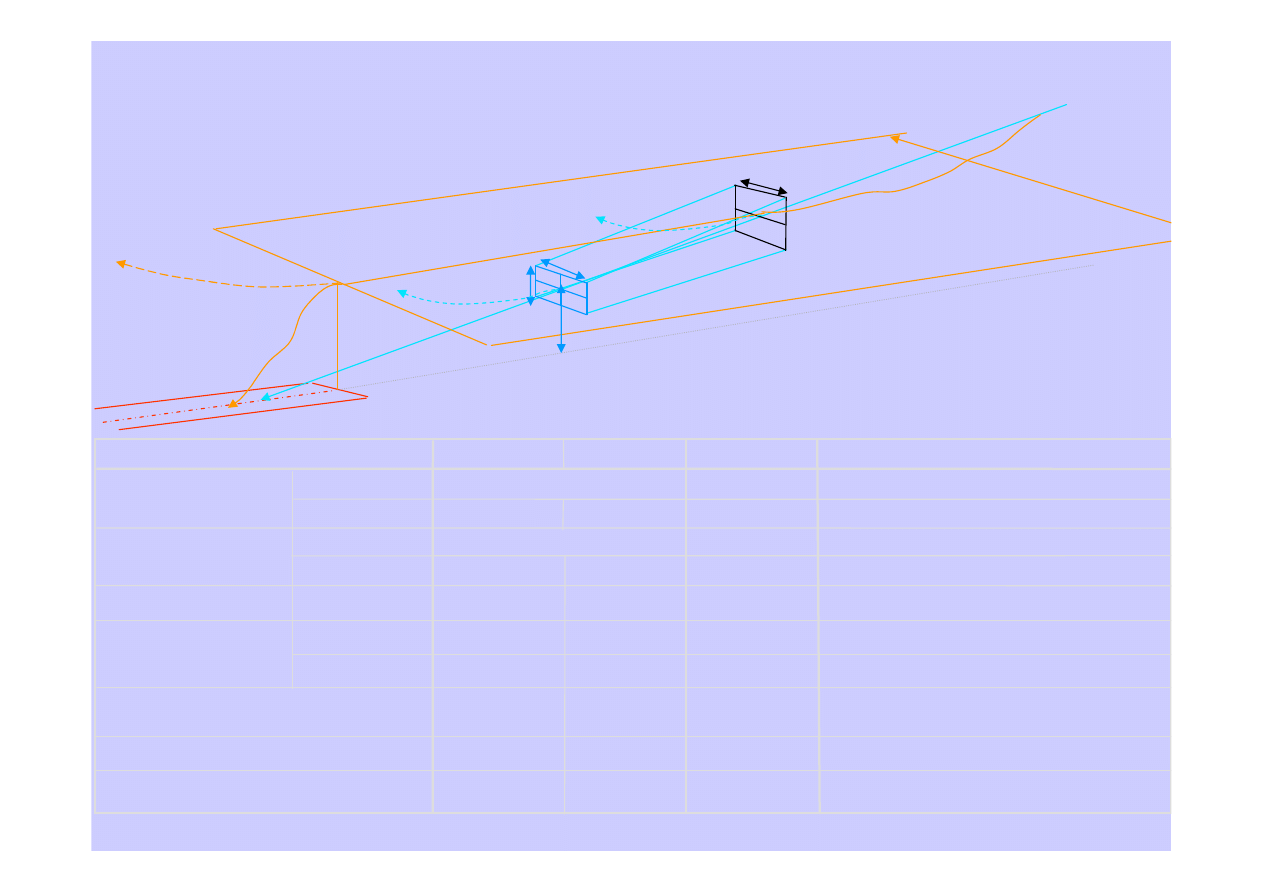
Rodzaje podejść/nawigacja TMA
1.
Dolot VFR, IFR (Procedury SID/STAR)
2.
Podejścia precyzyjne (ILS Cat. I),
3.
Podejścia nieprecyzyjne (NAP z
wykorzystaniem NDB, VOR/DME)
4.
Doloty z dróg lotniczych (RNAV) – procedury
P-RNAV w TMA.
5.
Przeszkody lotnicze („operat” w WGS-84)
6.
OCA dla lotniska (płaszczyzny wyznaczane w
oparciu o dane w WGS-84).
droga startowa
Dokładno
ść
Limit alarmu
Pozioma
Pionowa
Pozioma
Pionowa
CAT I
APV I
APV II
NPA
16 m
4 do 6 m
8 m
40 m
10 do 15
m
20 m
16 m
220 m
20 m
---
---
40 m
50 m
DH/MDH (min.)
Wid. Poz. (mini.)
Strefy ochronne
Ś
cie
ż
ka
200 ft
250 ft
250 ft
550 m
550 m
T.B.D
1200 m
zreduk.
(ILS)
bliska
ILS
Minima zale
żą
od przeszkód
5.2% (3°)
zni
ż
anie + stabilizacja
Kategorie podej
ść
Pionowa
5.2%(3°)
5.2% (3°)
200 ft
1000 m
1000 m
T.B.D
1800 m
Z
ś
wiatłami l
ą
d.
Bez
ś
wiateł l
ą
d.
Wiarygodno
ść
/ ci
ą
gło
ść
SIS
tak
tak
tak
nie
Ś
cie
ż
ka 5
.2%
(3°
)
Płaszc
zyzna
poziom
a MDH
( 250
ft)
220 m
16 m
20m
16 m
8 m
MAPT
250 ft
200 ft
bliska
ILS
Konwencjonalne urządzenia NAV
ILS-LOC
VOR/DME
NDB
DVOD/DME
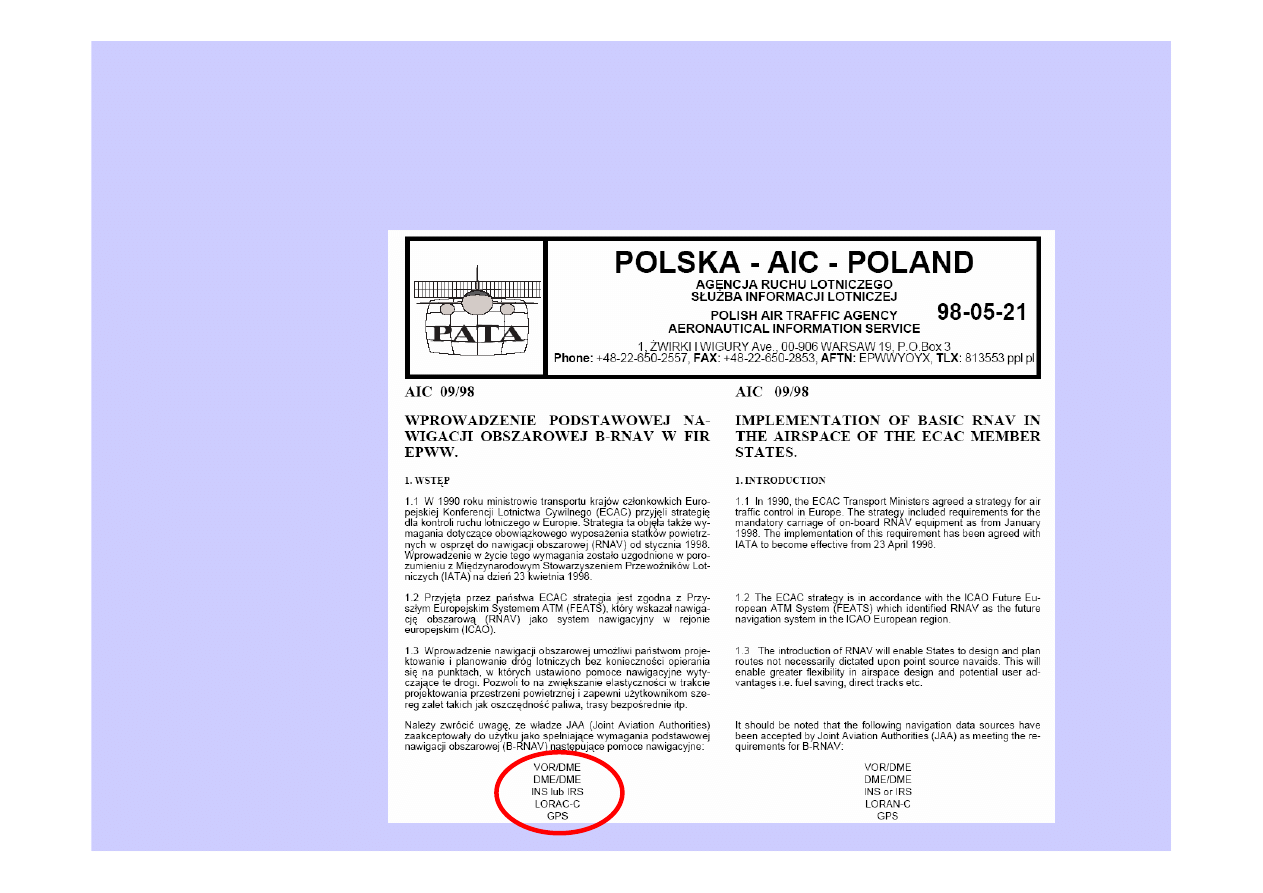
Nawigacja trasowa – TGL-2
B-RNAV
w Polsce
od 1998!
AIC 09/98
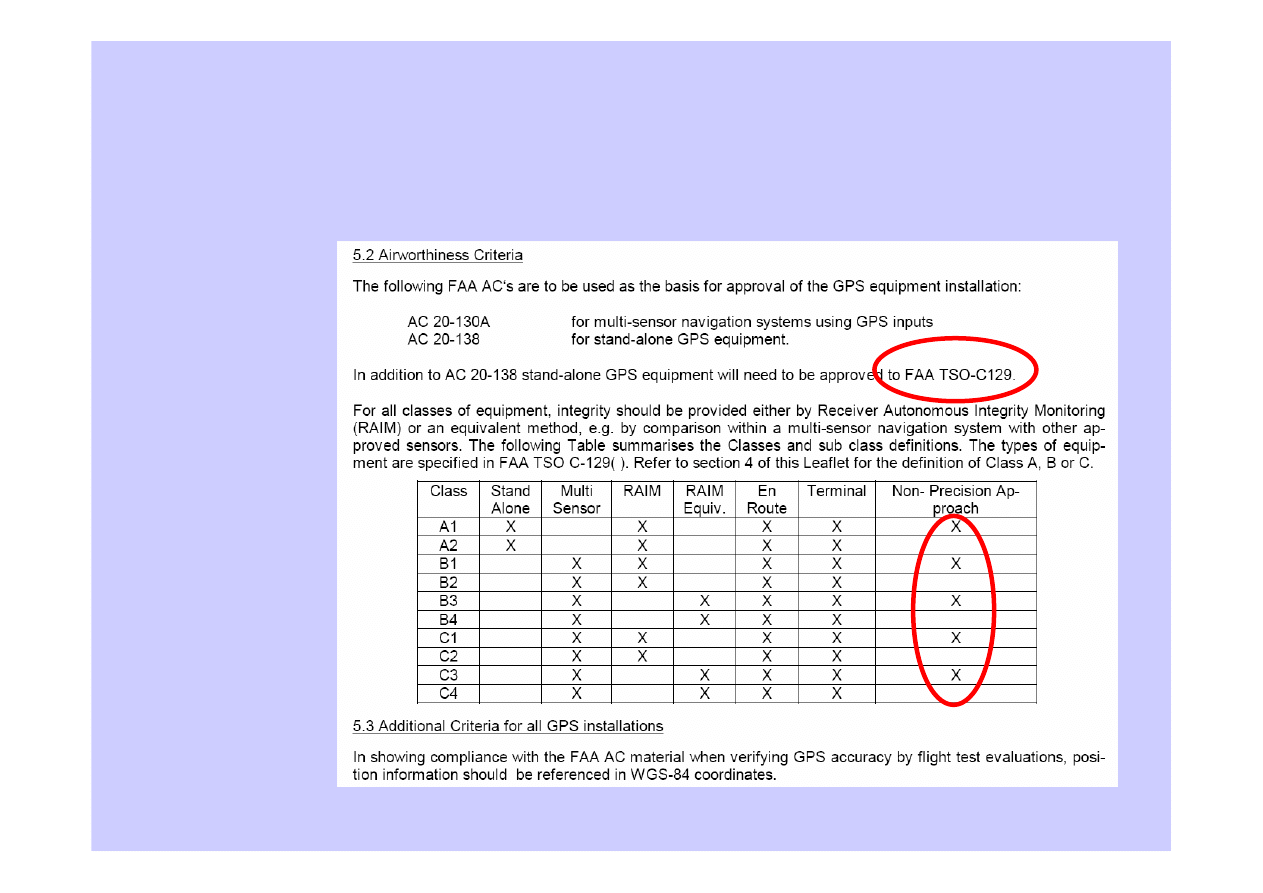
Podejścia NPA – TGL-3 rev1
Tylko
NPA
dla
statków
zgodnych
Z TGL-2
Przyszłość
• Podejścia APV – Approach with Vertical Guidance
– Baro-VNAV
– Augmented GNSS
– SBAS
– GBAS
– GRAS (Australia)
– GPS + Galileo
• Doloty GNSS
• ADS-B
• Nowe standardy separacji GNSS
• Drogi lotnicze oparte na RNP
• Rozwój GPS (L5 frequency)
• Budowa GALILEO (odbiorniki zintegrowane)
Przyszłość - rozwój
GPS/GLONASS/GALILEO
Część pokładowa / załoga
1.
Wyposażenie nawigacyjne (pokładowe)
1.
podstawowe,
2.
zapasowe
2.
Certyfikacja wyposażenia pokładowego
3.
Klasyfikacja ICAO dla GNSS/NAV
(system jedyny, podstawowy, zapasowy)
4.
Systemy zapasowe – konwencjonalne
5.
Uprawnienia pilota dla GNSS, szkolenia
Wybór systemu nawigacyjnego
1.
Nawigacja konwencjonalna,
2.
B-RNAV (drogi lotnicze), P-RNAV (TMA
lotnisk a docelowo również drogi lotnicze)
3.
RNP – RNAV (docelowe rozwiązania ICAO)
4.
P-RNAV w oparciu o DME/DME lub
rozwiązania GNSS
5.
Przyszłość VOR/DME trasowych,
NDB (np. jako minimalnego zapasu dla GNSS)
6.
Nowe koncepcje ICAO / FAA – PBN
(Performance Based Navigation).
Wyszukiwarka
Podobne podstrony:
GiNS Nawigacja Satelitarna sem 2
2010 09 System nawigacji satelitarnej GPS
[Instrukcja obsługi] System nawigacji satelitarnej Naviexpert
SII 20 Systemy nawigacji satelitarnej w zarzadzaniu flota pojazdow
NAWIGACJA SATELITARNA W POLSCE
Pomiary GPS i elementy nawigacji satelitarnej
System nawigacji satelitarnej GPS cz01
System nawigacji satelitarnej GPS cz12
Nawigacja satelitarna
System nawigacji satelitarnej GPS cz02
System nawigacji satelitarnej GPS cz04
System nawigacji satelitarnej GPS cz11
System nawigacji satelitarnej GPS cz07
System nawigacji satelitarnej GPS cz03
System nawigacji satelitarnej GPS cz08
nawigacja satelitarna notatki
nawigacja satelitarnaaa notatki
więcej podobnych podstron