Roch Wróblewski (rowro@poczta.onet.pl)
1
GPS w praktyce
Cz. 2. Trasy i punkty drogi
W pierwszej części cyklu opisano podstawowe pojęcia opisujące wskazania odbiornika GPS, ich
dokładność oraz sposób zapisywania. W niniejszym odcinku zostanie opisane wykorzystanie
odbiornika GPS do prowadzenia nawigacji według punktów drogi i trasy, a także możliwości użycia w
miejscach trudnych nawigacyjnie.
Nawigacja według punktów drogi i trasy
Trasa punktów drogi składa się z co najmniej dwóch punktów drogi WPT: początkowego i końcowego;
pomiędzy nimi mogą być umieszczone punkty pośrednie. Aby ułożyć trasę, w pamięci odbiornika
należy umieścić odpowiednie WPT albo wybrać je spośród już wprowadzonych. Pamiętamy, że część
trasy znajdująca się w pobliżu naszej aktualnej pozycji to
aktywny odcinek trasy
– ten, który właśnie
wykorzystujemy do prowadzenia nawigacji. W odniesieniu do tego odcinka mówimy o
punkcie
startowym
i
punkcie docelowym
. Z chwilą aktywacji innego odcinka, będzie to inna para punktów,
Dobór WPT trasy
. Poszczególne odcinki powinny być tak dobrane, aby zapewnić sensowną
odległość od niebezpieczeństw (zależnie od charakterystyki jachtu i prędkości oraz warunków, około
0.1 – 0.2 M: powinno to zapewnić wystarczającą przestrzeń np. w razie awarii steru lub napędu). WPT
definiujące węzły trasy powinny – o ile to możliwe – leżeć na bezpiecznej wodzie. WPT nie powinny
leżeć zbyt blisko siebie – zastosujemy wówczas inną technikę nawigacji. Położenie WPT powinno być
zgodne z prawem drogi – jeśli to możliwe, należy trasę poprowadzić po właściwej stronie drogi, albo –
jeśli trasa wiedzie środkiem kanału, podczas nawigacji należy utrzymywać pozycję po odpowiedniej
stronie, kontrolując m.in. XTE. Jeśli na trasie występują ostre zakręty, należy zachować odpowiednią
odległość od niebezpieczeństw leżących wewnątrz łuku (np. nagłe pojawienie się innej łodzi zza
zakrętu może zmusić do zaciśnięcia łuku albo przejścia na drugą stronę przed dziobem. WPT nie
powinien leżeć w miejscu, w którym na przedłużeniu odcinka trasy znajduje się niebezpieczeństwo:
jeśli zbyt długo utrzyma się poprzedni kurs i minie WPT, wejdzie się na nie. Jeśli tylko to możliwe,
WPT powinien być weryfikowalny innymi metodami, np. poprzez nabieżnik, sektor światła,
charakterystyczny obiekt na lądzie, etc. Nabieżnik może być wyznaczony również przez prostoliniowy
odcinek sieci elektrycznej, drogę, dwa charakterystyczne obiekty, linie brzegowe lądu lub wysp itp. W
miarę możliwości należy tak dobrać WPT, aby odcinek trasy wiódł wzdłuż linii pozycyjnej (np. stałej
głębokości). Jeśli WPT jest np. pozycją stawy, należy szczególnie uważać w jej pobliżu: nie chcemy
przecież wpłynąć dokładnie na tą pozycję; ponadto wiele innych łodzi może wybrać to miejsce.
Podobnie, wykorzystanie publikowanych WPT może spowodować lokalne ‘zagęszczenie’ ruchu.
Jeśli dobór WPT spełniający powyższe kryteria jest utrudniony, w opisie trasy należy zapisać uwagi o
możliwym sposobie nawigowania i niebezpieczeństwach.
Pamiętajmy, że tylko niektóre WPT przeznaczone są do bezpośredniego wykorzystania jako część
trasy, tj. nawigator zakłada przejście przez WPT: dotyczy to zwłaszcza publikowanych zbiorów WPT.
WPT odejścia
. Zazwyczaj analogiczny do WPT podejścia; w tym przypadku pozwala na
wykorzystywanie wszystkich wielkości podawanych przez GPS, jak np. XTE i BRG; w przeciwnym
wypadku wielkości te byłyby zależne od przypadkowej pozycji, w której włączono odbiornik albo w
której aktywowano GO TO.
WPT niebezpieczeństwa
. Punkt drogi może wyznaczać bezpieczną drogę omijającą
niebezpieczeństwo, np. mielizny, kamienie, strefy zakazane itp. Obydwa odcinki wiążące taki WPT z
sąsiednimi WPT powinny być wolne od niebezpieczeństwa. Należy też rozumieć, w jakiej odległości
od niebezpieczeństwa umieszczony jest WPT i odcinki trasy. Zbyt mała odległość niepotrzebnie
naraża jacht, zbyt duża wydłuża przejście. Odległość wystarczająca w danych warunkach może być
niebezpieczna w innych (kierunek wiatru, stan morza, widzialność, zanurzenie jachtu,
manewrowalność w danych warunkach, osiągane prędkości, możliwość napotkania sieci etc.).
Odcinek pilotowy
. W wielu miejscach (np. kanał, cieśnina) nie ma sensu wyznaczanie szczegółowej
trasy. Należy wówczas zdefiniować WPT wejścia i wyjścia, natomiast odcinek ten traktować jako
pilotowy i prowadzić nawigację innymi metodami. Piloci samolotów określają takie okoliczności jako
przejście z IFR (instrument flight rules) do VFR (visual flight rules).
WPT zmiany kursu
. W miejscach, w których stosuje się odcinki pilotowe, można pomocniczo
korzystać z WPT oznaczających miejsca zmiany kursu. Oczywiście decyzje o zmianie kursu

Roch Wróblewski (rowro@poczta.onet.pl)
2
podejmujemy na podstawie informacji wizualnych, jednakże WPT pomaga jako sposób upewnienia
się, że w tym właśnie miejscu powinniśmy skręcić (np. rozgałęzienia co kilka kabli w szkierach).
Ponadto, WPT zmiany kursu będą dość typową częścią trasy, oznaczając zmianę kursu wymuszoną
kształtem wybrzeża, przed przecięciem TSS itp.
Podejście do lądu
. W niektórych okolicznościach WPT podejściowy lepiej umieścić nie bezpośrednio
w miejscu do którego zmierzamy, ale w pewnej odległości wzdłuż wybrzeża. Jeśli np. podchodzimy
zawsze przy tym samym stanie prądu pływowego, zazwyczaj lepiej gdy celujemy w punkt położony
pod prąd: przy większym znosie mielibyśmy być może trudności z podejściem do wejścia pod prąd.
Również jeśli mogą wystąpić warunki pogorszonej widoczności, o ile to możliwe lepiej korzystać z linii
pozycyjnej z głębokości niż wchodzić bezpośrednio według WPT. WPT podejścia do lądu powinien
być weryfikowalny (często jest to np. znak bezpiecznej wody albo początek farwateru; ważne jest też
sprawdzenie znaków nawigacyjnych i charakterystycznych obiektów na lądzie (latarnie i inne światła,
maszty, wieże, etc.). Zazwyczaj WPT podejścia do lądu będzie leżał w pewnej od niego odległości i
będzie się wiązać ze zmianą sposobu nawigacji: odejściem od nawigacji opartej głównie na GPS i
rozpoczęciem nawigacji pilotowej.
WPT wejścia
. GPS pełni tu rolę pomocniczą: należy rozumieć, że promień błędu może spowodować,
że równie prawdopodobnie popłyniemy po właściwej, jak i niewłaściwej stronie pławy. GPS powinien
jednak pełnić rolę weryfikacyjną w stosunku do podstawowych metod nawigacji, a także pomóc w
sytuacjach nadzwyczajnych. Mimo tego nie należy poddawać się fałszywemu poczuciu
bezpieczeństwa w niesprzyjających warunkach i w razie konieczności zrezygnować z wejścia!
Możliwe jest także inne wykorzystywanie narzędzia, jakim są waypointy. Nawigatorzy zawsze
korzystali z oznaczeń wybranych pozycji – dawniej tylko poprzez znaki nawigacyjne, obecnie również
poprzez WPT. Stąd WPT może oznaczać pozycję znaku nawigacyjnego (niektórzy preferują WPT
położony w pewnej odległości obok znaku, aby nie zderzyć się z punktem drogi :-) ). Taki WPT
czasem może być wykorzystywany bezpośrednio (np. podejście w stronę latarni morskiej –
postępujemy tak, jak wówczas, gdy korzystamy z latarni wizualnie: w pewnej odległości należy
zmienić kurs; w tym celu można wówczas skorzystać z funkcji
proximity WPT
). Czasem ma tylko
pomóc w identyfikacji ważnego znaku: przydaje się to m.in. wówczas, gdy istnieje możliwość
korzystania z radaru.
Weryfikacja trasy
. Typowe błędy to niewłaściwa kolejność doboru WPT, błędnie wprowadzone WPT,
czy niewłaściwie dobrane WPT. Można to zweryfikować poprzez rysunek trasy na mapie i porównanie
zmierzonych odległości i kursów poszczególnych odcinków trasy z wielkościami obliczonymi przez
odbiornik GPS. Przy okazji należy zweryfikować poprawność doboru WPT – czy trasa jest optymalna
z punktu widzenia bezpieczeństwa.
Włączenie się do trasy
. Jeśli zastosujemy prostą nawigację GO TO WPT, aktywny odcinek tworzony
jest w momencie aktywacji – od aktualnej pozycji traktowanej jako pozycja startowa, do punktu
docelowego. W przypadku nawigacji w oparciu o trasę, wszystkie odcinki są już zdefiniowane poprzez
pary WPT. Należy więc rozumieć, co wybierze odbiornik GPS w momencie uaktywnienia trasy.
Zazwyczaj odbiornik analizuje aktualną pozycję w chwili aktywacji trasy i wybiera najbliższy jej odcinek
trasy jako odcinek aktywny. Oznacza to, że możliwe jest włączenie się do trasy również w jej
środkowej części. Wskazania (np. XTE) odnoszone są do oryginalnych odcinków.
Inne, czasami spotykane sposoby, są analogiczne do GO TO WPT, tzn. w momencie aktywacji
definiowany jest aktywny odcinek od aktualnej pozycji do najbliższego WPT należącego do trasy.
Wskazania mogą być mylące: np. XTE = 0, mimo że aktualna pozycja mogła być odległa od
oryginalnej trasy. Ponieważ tak zdefiniowany odcinek może być niebezpieczny, metoda ta wymaga
uwagi przy włączaniu się do trasy.
Generalnie, przy włączeniu się do trasy bezpośrednie wykorzystanie BRG musi być poprzedzone
sprawdzeniem mapy.
Obsługa trasy
. Możliwe są zazwyczaj różne czynności, takie jak: odwrócenie trasy, wstawienie
innego WPT, usunięcie WPT, wybór WPT (odcinka trasy), podmiana WPT na inny, zawieszenie lub
rezygnacja z trasy (np. dla zawinięcia do portu) itp. Należy sprawdzić, jak te czynności wykonuje się w
przypadku właśnie używanego odbiornika GPS.
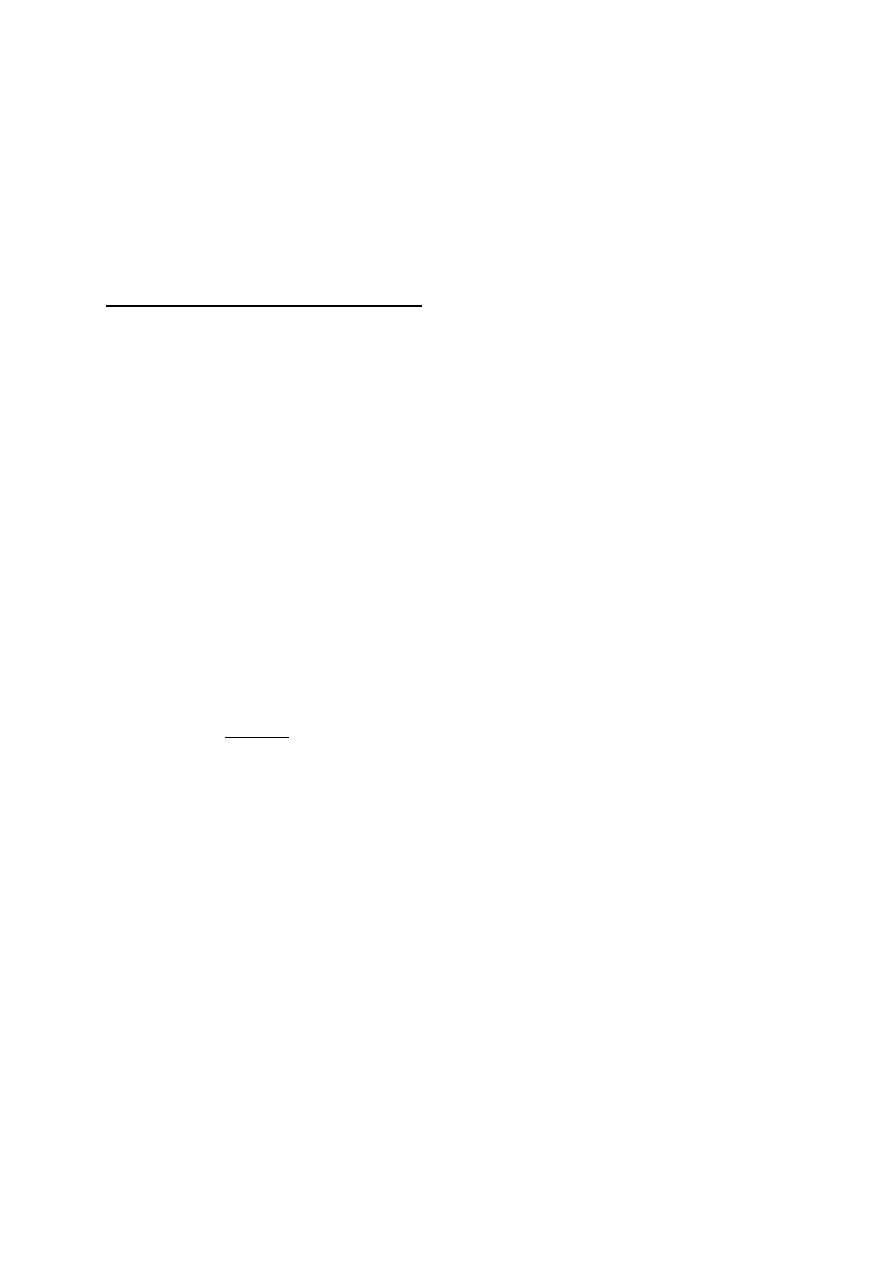
Przybycie do WPT
. Odbiornik GPS korzysta z wielu algorytmów pozwalających uznać, że należy
uaktywnić następny odcinek trasy z następnym pośrednim WPT docelowym. W trakcie nawigacji w
pobliżu WPT należy być uważnym i w szczególności niekoniecznie opierać się tylko na wskazaniach
BRG. W pobliżu WPT – nim system uaktywni następny odcinek trasy – namiar zacznie się szybko
zmieniać. Uaktywnienie następnego WPT może nastąpić w pewnej odległości od położenia
Roch Wróblewski (rowro@poczta.onet.pl)
3
pożądanego punktu zwrotu: natychmiastowe przejście na nowy kurs może prowadzić w stronę
niebezpieczeństwa (np. WPT jako punkt zwrotu w ciasnym przejściu). Należy wówczas raczej
utrzymać poprzedni kurs i zmienić dopiero wówczas, gdy XTE (obliczony już względem nowego
aktywnego odcinka trasy) będzie równy zero, albo BRG będzie równy DTK.
WPT1
WPT3
Aktywacja następnego
odcinka trasy
BRG na
następny WPT
Jacht utrzymuje kurs
i wykonuje zwrot gdy
XTE = 0 albo BRG = DTK
DTK
Ze względu na te problemy, należy raczej unikać wstawiania WPT w miejscach trudnych
nawigacyjnie. Np., zamiast umiejscowienia w samym środku wejścia do kanału albo cieśniny, WPT
może leżeć w pewnej odległości od wejścia tak, aby raczej odcinek trasy, a nie punkt definiował
sposób nawigacji w takim miejscu. Niestety, nie da się tego uniknąć w miejscach wymagających
znacznej zmiany kursu.
Opis punktów drogi i trasy
Planowanie trasy w odniesieniu do praktycznego zastosowania GPS to przede wszystkim dobór
kluczowych pozycji jako punktów drogi WPT. Pozycje te mogą być odczytane z mapy lub z locji,
wybrane spośród WPT zapisanych wcześniej lub ze spisu WPT.
Wybrane punkty drogi nanosimy na mapy i wprowadzamy do pamięci GPS. Dobrze jest prowadzić
spis WPT (może być na papierze, a może być w specjalnym programie do tego przeznaczonym), w
którym zapisane będą informacje które nie mieszczą się w pamięci GPS.
Zapisane WPT układamy następnie jako trasę. Podajemy kolejność WPT; wówczas GPS sam wyliczy
kursy i odległości pomiędzy nimi. Wskazane jest narysowanie tej trasy na mapach. Dobrze jest
prowadzić opis trasy, w którym zapiszemy dodatkowo informacje nie mieszczące się w pamięci GPS.
Jeśli nasz GPS nie jest wyposażony w elektroniczną mapę, ale ma ekran 'mapy' pokazujący ruch
względem punktów drogi i trasy, możemy też wprowadzić do pamięci (jako WPT, ale nie
wykorzystywane w trasie) pozycje charakterystyczne, np. latarń morskich, wież radiowych itp.
Omyłki przy wprowadzaniu danych to jedna z najczęstszych przyczyn błędów nawigacyjnych.
Włączenie WPT do trasy daje odległość i kurs wyliczony przez GPS na podstawie wprowadzonych
współrzędnych: jeśli zgadzają się one z kierunkiem i kursem odczytanymi z mapy pomiędzy
naniesionymi WPT, daje to szybkie i niezależne sprawdzenie poprawności wprowadzenia pozycji
WPT.
Spis punktów drogi WPT.
Kod
: identyfikuje WPT w zapisach i na wyświetlaczu
Nazwa i opis
: zawiera istotne informacje (np. odległość i namiar do główek portu , opis tych główek)
Pozycja z mapy
: wraz z użytym Chart Datum
Pozycja z morza
: wraz z użytym Chart Datum (do weryfikacji czy zgadza się z pozycją odczytaną z
mapy; pozycja WPT odczytana faktycznie w morzu)
Mapa
: numer mapy, na której znajduje się WPT
Weryfikacja
: wszystkie informacje potrzebne do weryfikacji pozycji innymi sposobami, np. odległości i
namiary na stałe znaki nawigacyjne, ukształtowanie brzegu, nabieżniki itp. Jeśli informacje te są na
Roch Wróblewski (rowro@poczta.onet.pl)
4
mapie, wystarczy odnośnik dla przypomnienia; jeśli są porozrzucane w różnych źródłach, lepiej je
zebrać tutaj wraz z odnośnikami)
UWAGA
. Punkty drogi zbierane w morzu są niezależne od użytego Chart Datum, gdyż odnoszą się
bezpośrednio do fizycznego położenia. Będą odpowiednio przeliczane przy każdorazowej zmianie
ustawień Chart Datum w konfiguracji odbiornika. Jednak porównując je z mapą, należy posługiwać się
takim samym Chart Datum co na mapie.
Opis trasy.
Odległość
: pomiędzy kolejnymi WPT trasy
Kurs
: pomiędzy kolejnymi WPT trasy
Ograniczenia
: np. maksymalna wielkość XTE (przykład: trasa wzdłuż Wysp Fryzyjskich ograniczona
przez TSS)
Punkty charakterystyczne
: np. opis wymalowania latarni morskiej, kształtu stawy - jeśli nie jest to
szybko dostępne (albo odnośnik); kształt i kolor budynków i skał itp.
Zapisy prowadzone w trakcie realizacji trasy.
Czas przybycia do WPT
: można też zapisać w dzienniku
Odczyt logu w WPT
: można też zapisać w dzienniku.
W przypadku wystąpienia błędów zapisy te pomogą w ich weryfikacji.
Nawigacja w trudnych miejscach
Nawigacja przybrzeżna w trudnych miejscach nie powinna być prowadzona wyłącznie w oparciu o
GPS. Będzie on jednak pełnił ważną rolę pomocniczą, jako dodatkowy system nawigacyjny
umożliwiający wzajemną weryfikację różnych metod.
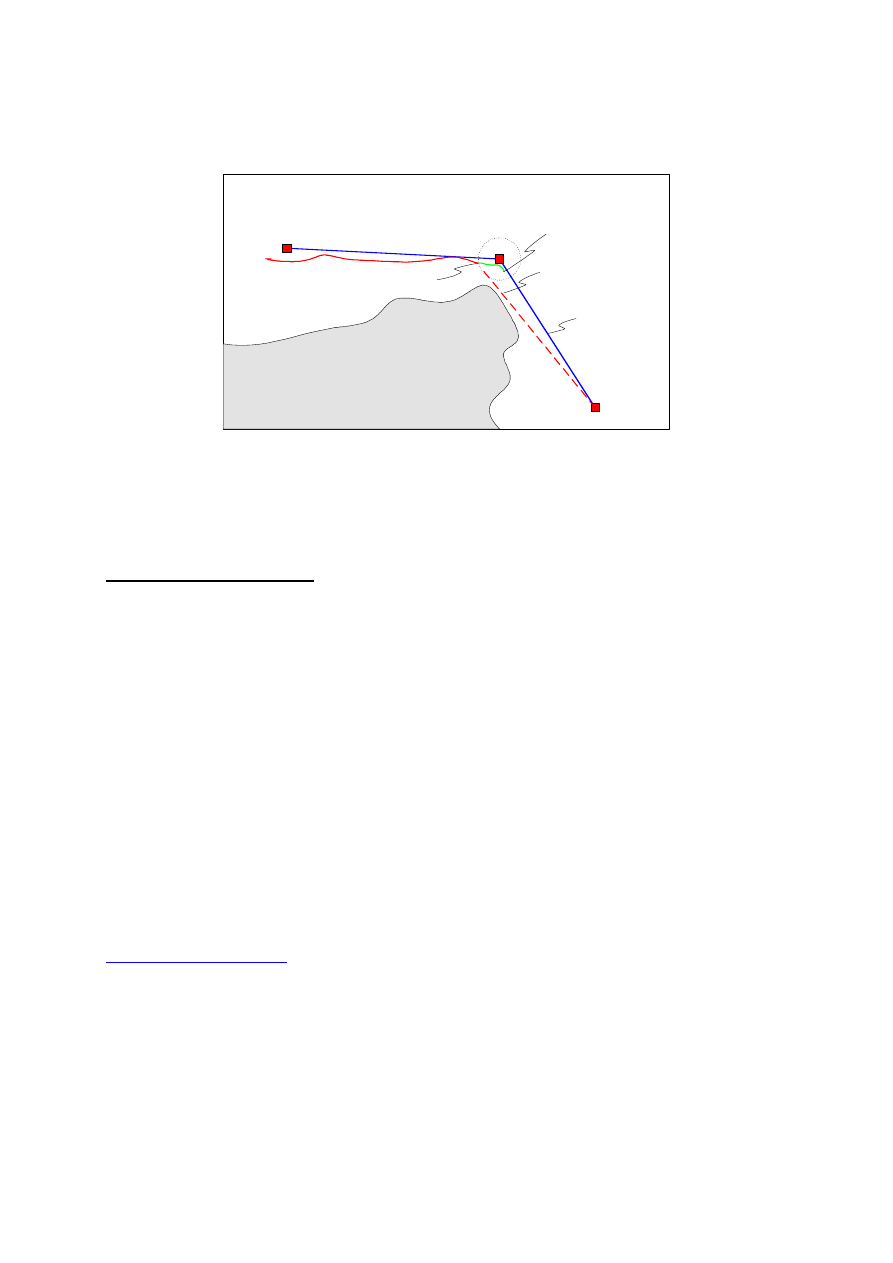
Można przyjąć następującą rozsądną regułę: dopóki dysponujemy przestrzenią morską wystarczającą
do zaplanowania trasy wraz ze strefą bezpieczeństwa (około 0.1 – 0.2 M od niebezpieczeństw, w
zależności od jachtu i warunków) oraz nie ma innych przeciwwskazań (zwłaszcza ograniczona
widoczność), możemy prowadzić nawigację w oparciu o GPS. W innych przypadkach GPS będzie
pełnił rolę ograniczoną: jeśli strefa bezpiecznej wody kurczy się i pozostaje strefa błędu wraz ze strefą
bezpieczeństwa, GPS nadal jest użyteczny, ale nawigacja opiera się przede wszystkim na wzroku.
Jeśli strefa bezpieczeństwa nie istnieje, pozostaje wolny obszar o wielkości porównywalnej z
wielkością obszaru błędu i GPS pełni okazjonalnie rolę pomocniczą.
Bezpieczna
wielkość XTE
Strefa
bezpieczeństwa
Strefa
bezpiecznej
wody
Promień
błędu
W trudnych miejscach nawigator przede wszystkim musi być pewien że znajduje się w bezpiecznej
strefie. Ponadto może się zdarzyć, że nanoszenie pozycji i/lub sprawdzanie mapy jest utrudnione lub
niemożliwe w danej chwili. W takich przypadkach sporządzamy szkic nawigacyjny na którym
naniesione są te elementy nawigacji, które są w danych warunkach ważne. Szkic ten może być
umieszczony na mapie albo na kartce papieru do wykorzystania w kokpicie.
Roch Wróblewski (rowro@poczta.onet.pl)
5
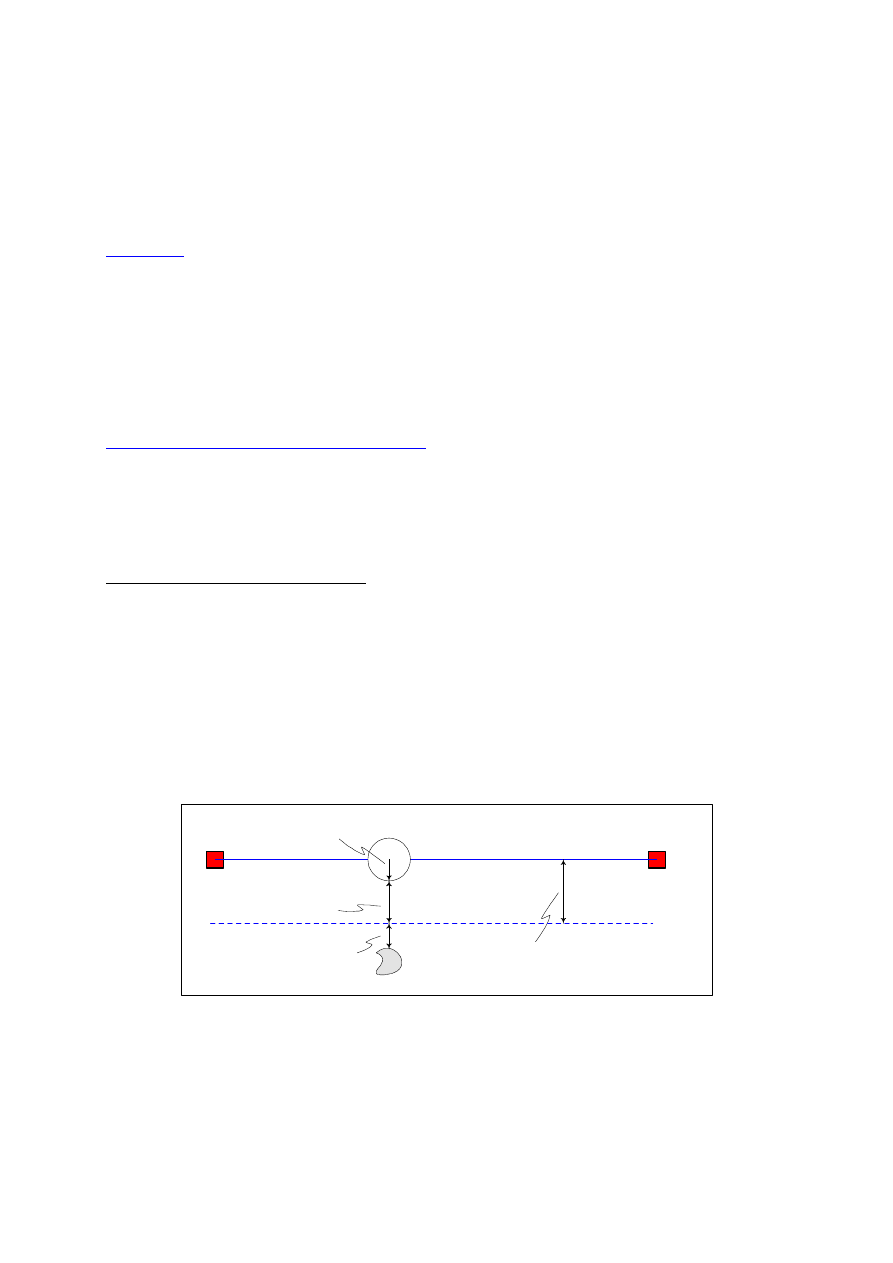
Punkt
docelowy
Bezpieczna
wielkość XTE
Wykorzystanie XTE
3
1
2
Odległość 3.25 M, kurs 090
o
, XTE < 0.5 M
Praktyczne zastosowanie GPS w tych okolicznościach to przede wszystkim wykorzystanie XTE, BRG i
DST. O ile to możliwe, WPT należy tak dobrać aby sternik mógł się kierować na widoczny obiekt, np.
skalisty przylądek czy komin.
Korzystając z XTE dla całej trasy, należy wybrać najmniejszą wartość alarmu XTE spośród
poszczególnych odcinków (z zachowaniem marginesu bezpieczeństwa np. 0.1 M – 0.2 M), gdyż
rekonfiguracja pomiędzy odcinkami niepotrzebnie komplikuje obsługę odbiornika. Informacje o
różnych wielkościach dopuszczalnego XTE należy nanieść na plan i/lub szkic nawigacyjny.
Strefa bezpieczeństwa dla XTE oznacza, że pomiędzy maksymalnym zaplanowanym XTE a
niebezpieczeństwem odległość jest nie mniejsza od przyjętego marginesu.
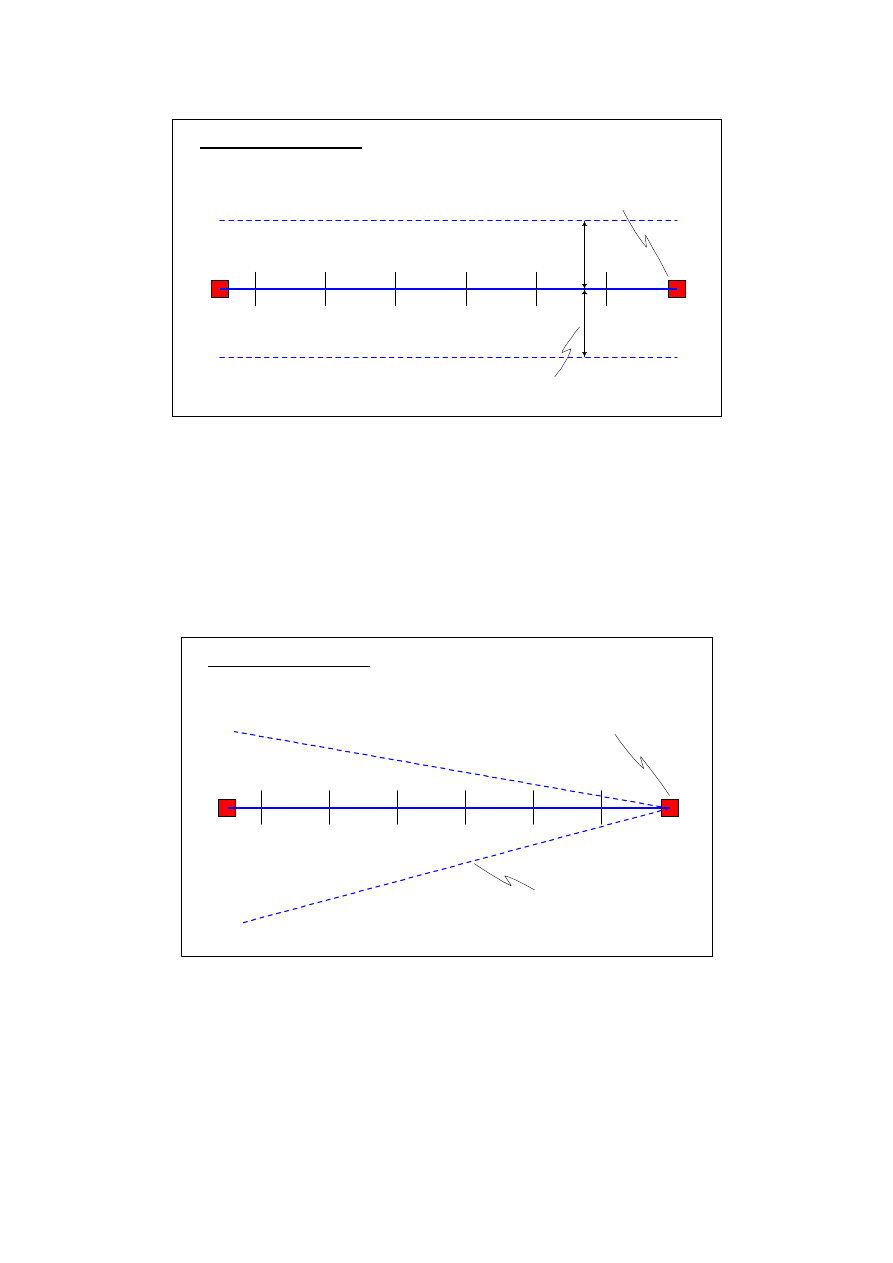
Punkt
docelowy
Bezpieczna wielkość BRG
5
o
(10
o
w trudnych warunkach)
od niebezpieczeństwa
Wykorzystanie BRG
3
1
2
Odległość 3.25 M, kurs 090
o
> 075
o
< 100
o
Należy podkreślić, że najpewniejsze wyniki daje wykorzystanie stałych znaków nawigacyjnych
(zwłaszcza nabieżniki), a także naturalnych elementów brzegu, o ile są łatwo rozpoznawalne.
Wszystkie te metody powinny być przez nawigatora wzajemnie konfrontowane. Szczególnie
interesujące jest jednoczesne wykorzystanie GPS i radaru do nawigacji [ale o tym kiedy indziej :-) ].
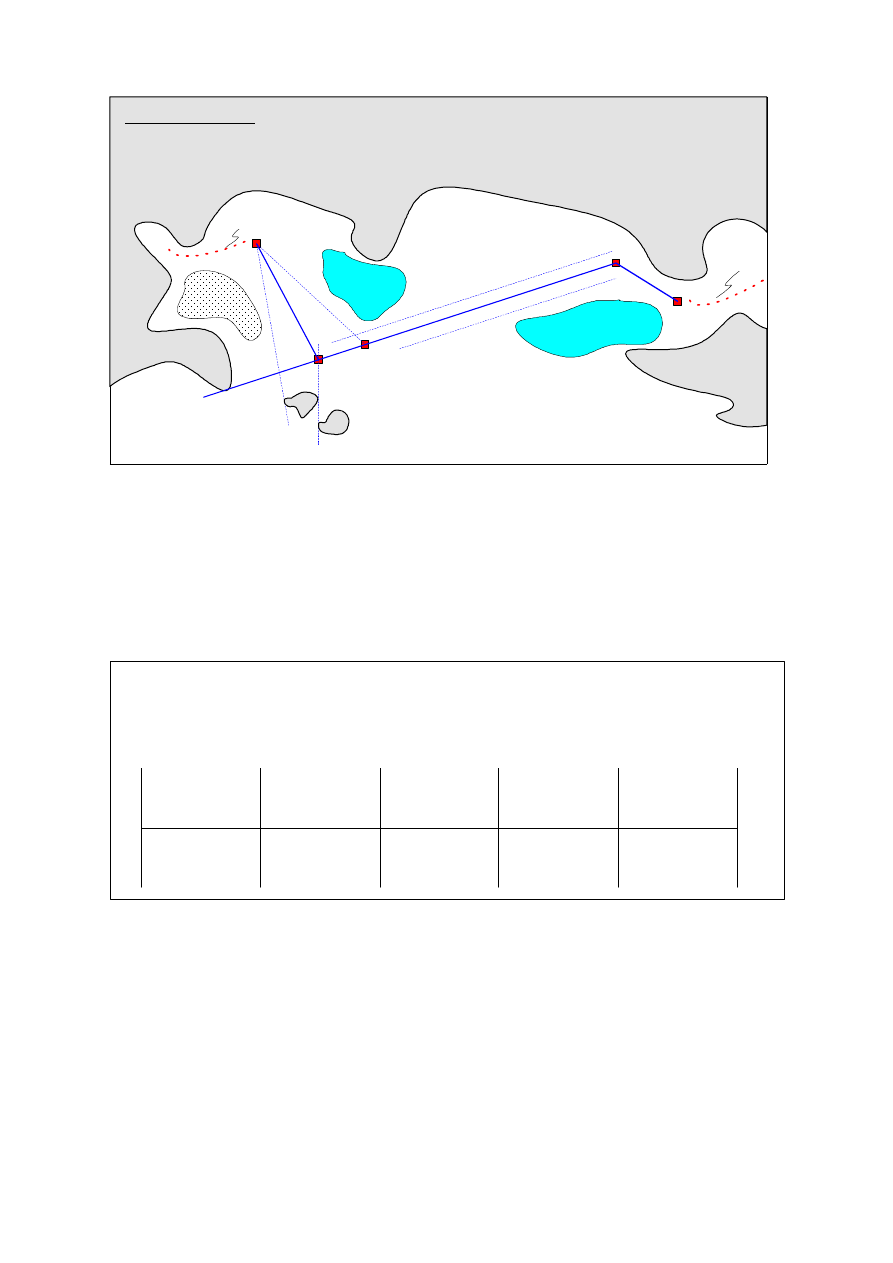
Przykład szkicu nawigacyjnego na mapie znajduje się na poniższym rysunku.
Roch Wróblewski (rowro@poczta.onet.pl)
6
WPT1
Tor
wodny
Szkic nawigacyjny
Płycizny
Tor
wodny
Płycizny
Skały
WPT4
WPT3
WPT2
A
180
o
350
o
170
o
300
o
315
o
330
o
250
o
B
D
C
2 M
3.5 M
8 M
Do WPT1 dochodzimy kursem pilotowym po torze wodnym, a następnie kursem 300
o
(odległość 2 M)
dochodzimy do czerwonej boi WPT2. Stąd kursem 250
o
(kurs na przylądek D, odległość 8 M,
dopuszczalny XTE w lewo x, w prawo y) do WPT3. Moglibyśmy skręcić już przy A, ale zmianę kursu
w WPT3 wyznacza nam pokrycie się krańców wysepek B i C w namiarze 180
o
. Stąd kursem 330
o
(350
o
> BRG > 315
o
, namiar na zachodni cypel wyspy B > 170
o
, odległość 3.5 M) do WPT4. Od
WPT4 (boja głębokiej wody) kurs pilotowy torem wodnym.
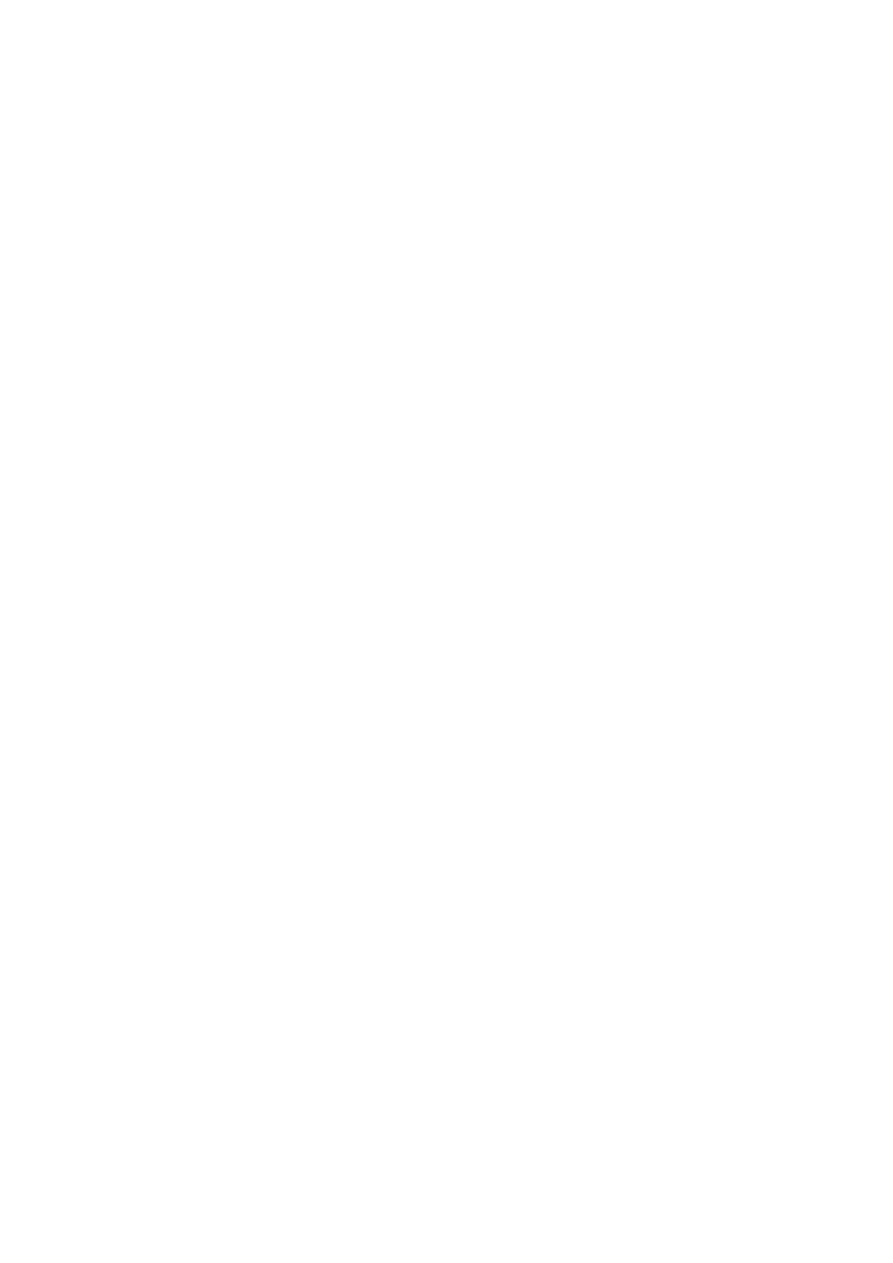
Odpowiedni szkic nawigacyjny można też wykonać w bardziej schematycznej postaci do
wykorzystania w kokpicie.
XT
E < 0.5 M
!
250
o
p
łw.
D
Mar
ina 1
300
o
37
2 M
35
KPL
Mar
ina 2
250
o
45
8 M
330
o
48.5
3.5 M
KPL
WPT
4
WPT
3
WPT
2
WPT
1
To
r
w
odny
To
r
w
odny
315
o
< BR
G < 3
50
o
!
170
o
w
ys
pa B
!
180
o
w
ysp
y B i C
Proximity WPT
. Istnieje możliwość wykorzystania ‘Proximity WPT’ do oznaczenia niebezpieczeństwa.
Jest to WPT z podanym promieniem kolistej strefy alarmu wokół niego. Odbiornik wyda komunikat o
przekroczeniu strefy, gdy znajdziemy się wewnątrz koła. Strefa powinna być oznaczona z pewnym
marginesem bezpieczeństwa, np. 0.1 M od niebezpieczeństwa. Jeśli odbiornik rysuje takie okręgi na
ekranie sterowania, funkcja ta jest bardzo wygodna: pozwala ustawić punkt docelowy w dalszej
odległości i sterować tak, aby ominąć niebezpieczeństwo po granicy strefy.
Linie ograniczające
. W sprzyjających okolicznościach można wykorzystać stałą wartość długości
albo szerokości geograficznej jako linię ograniczającą. Przykładowo, halsując wzdłuż linii brzegowej o
przebiegu równoleżnikowym, możemy założyć, że nie wolno przekroczyć określonej wartości
szerokości geograficznej i wykorzystywać w tym celu odczyt z GPS.
Kontrola czasu
. Korzystając z GPS nie należy zapominać o kontroli czasu. Wskazania ETA
pomagają w zgrubnej orientacji, kiedy zbliżamy się np. do punktu zmiany kursu. Kontrola czasu
wykorzystywana może być zwłaszcza w praktycznej nawigacji na szybkich jachtach motorowych wraz
z kontrolą przebytej odległości.
Roch Wróblewski (rowro@poczta.onet.pl)
7
Kontrola postępu
. Nawet w wąskim kanale GPS można wykorzystać m.in. do kontroli postępu
(zwłaszcza przydaje się to na monotonnych odcinkach kanałów holenderskich). Dopiero gdy
znajdziemy się w mniejszej odległości od np. rozgałęzienia, musimy zacząć aktywną identyfikację
obiektów brzegowych, aby znaleźć rozgałęzienie. Poza tym, GPS wraz z logiem pozwoli na kontrolę i
planowanie zużycia paliwa.
Przed powszechnym zastosowaniem nawigacji satelitarnej nawigator w większości przypadków nie
znał dokładnej pozycji, a wiążąca się z tym niepewność dyktowała większą ostrożność. Nawigator był
świadom tej niepewności! Korzystając z nawigacji GPS należy zachować poczucie pewnego
sceptycyzmu w stosunku do informacji płynących z odbiornika GPS. Zasada wzajemnego
porównywania rezultatów różnych metod nawigacji nadal zachowuje ważność! Przy świadomym i
umiejętnym korzystaniu z nawigacji satelitarnej jest to proste i nie wymaga specjalnie dużego nakładu
pracy (zob. I część: porównania kursów, drogi, szybkości, a także namiarów).
Wyszukiwarka
Podobne podstrony:
gps jemioluszka ad2 cz2
Zakażenia grzybicze skóry cz2
GPS
parafunkcje cz2
podziały złamań cz2 1sd
8(45) Diagramy klas cz2
gps b ŕdy
charakterystyka dochodow samorzadu terytorialnego (cz2
Style kierowania cz2
Wykład I Grafika inżynierska cz2
MDA ID zadprzedkol(3) cz2 13 14
Kartoteka Lodowa kraina WS3 po cz2
zwiazki nieorg 1 cz2
GPS
Projekt fund płyt pal cz2 A Kra
artykul profilaktyka cz2 id 695 Nieznany (2)
metale niezelazne cz2 id 293802 Nieznany
ustny cz2, GEODEZJA, !!!Do uprawnien
więcej podobnych podstron