„
Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
MINISTERSTWO EDUKACJI
NARODOWEJ
Danuta Pawełczyk
Jacek Krzysztoforski
Montowanie i testowanie połączeń układów automatyki
311[07].Z7.01
Poradnik dla ucznia
Wydawca
Instytut Technologii Eksploatacji – Państwowy Instytut Badawczy
Radom 2006

„
Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
1
Recenzenci:
mgr inż. Anna Górska
mgr inż. Grzegorz Śmigielski
Opracowanie redakcyjne:
mgr inż. Danuta Pawełczyk
Konsultacja:
mgr inż. Gabriela Poloczek
Korekta:
mgr inż. Urszula Ran
Poradnik stanowi obudowę dydaktyczną programu jednostki modułowej 311[07].Z7.01
„Montowanie i testowanie układów połączeń automatyki”, zawartego w modułowym programie
nauczania dla zawodu technik elektronik.
Wydawca
Instytut Technologii Eksploatacji – Państwowy Instytut Badawczy, Radom 2006

„
Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
2
SPIS TREŚCI
1. Wprowadzenie
3
2. Wymagania wstępne
5
3. Cele kształcenia
6
4. Materiał nauczania
7
4.1. Zasady łączenia urządzeń automatyki przemysłowej
7
4.1.1. Materiał nauczania
7
4.1.2. Pytania sprawdzające 17
4.1.3. Ćwiczenia 17
4.1.4. Sprawdzian postępów 19
4.2.
Zasady tworzenia dokumentacji połączeń elektrycznych w układach
automatyki
20
4.2.1. Materiał nauczania
20
4.2.2. Pytania sprawdzające 32
4.2.3. Ćwiczenia 33
4.2.4. Sprawdzian postępów 35
4.3. Układy sterowania automatycznego
36
4.3.1. Materiał nauczania
36
4.3.2. Pytania sprawdzające 41
4.3.3. Ćwiczenia 41
4.3.4. Sprawdzian postępów 49
5. Sprawdzian osiągnięć
50
6. Literatura
55

„
Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
3
1. WPROWADZENIE
Poradnik, będzie Ci pomocny w przyswajaniu wiedzy o budowie, zasadzie działania
i przeznaczeniu układów automatyki, montowaniu i testowaniu układów automatyki, tworzeniu
dokumentacji, a także ułatwi wykonywanie ćwiczeń, zadań i przygotuje do czekających Ciebie
w przyszłości egzaminów.
Poradnik ten zawiera:
1. Wymagania wstępne, czyli wykaz niezbędnych umiejętności i wiedzy, które powinieneś mieć
opanowane, aby przystąpić do realizacji tej jednostki modułowej.
2. Cele kształcenia tej jednostki modułowej.
3. Materiał nauczania (rozdział 4), który umożliwia samodzielne przygotowanie się
do wykonania ćwiczeń i zaliczenia sprawdzianów. Obejmuje on również ćwiczenia, które
zawierają:
− wykaz materiałów, narzędzi i sprzętu potrzebnych do realizacji ćwiczenia,
− pytania sprawdzające wiedzę potrzebną do wykonania ćwiczenia,
− sprawdzian postępów.
4. Sprawdzian osiągnięć, w którym znajduje się przykładowy zestaw zadań sprawdzających
Twoje opanowanie wiedzy i umiejętności z zakresu całej jednostki.
5. Literaturę uzupełniającą.
Jeżeli masz trudności ze zrozumieniem tematu lub ćwiczenia, to poproś nauczyciela
o wyjaśnienie i ewentualne sprawdzenie, czy dobrze wykonujesz daną czynność. Po przerobieniu
materiału spróbuj zaliczyć sprawdzian z zakresu jednostki modułowej.
Jednostka modułowa: „Montowanie i testowanie układów połączeń automatyki”, której treści
teraz poznasz, jest jednym z modułów koniecznych do zapoznania się ze sterowaniem procesami
technologicznymi z zastosowaniem regulatorów nieciągłych, co w przyszłości pozwoli Ci
na zrozumienie działania urządzeń, z jakimi spotykasz się na co dzień, a także pozwoli na podjęcie
prac projektowych, montażowych, konserwatorskich związanych z sterowaniem.
Bezpieczeństwo i higiena pracy
W czasie pobytu w pracowni, laboratorium musisz przestrzegać regulaminów, przepisów bhp
oraz instrukcji przeciwpożarowych, wynikających z rodzaju wykonywanych prac. Przepisy te
poznasz podczas trwania nauki.
„
Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
4
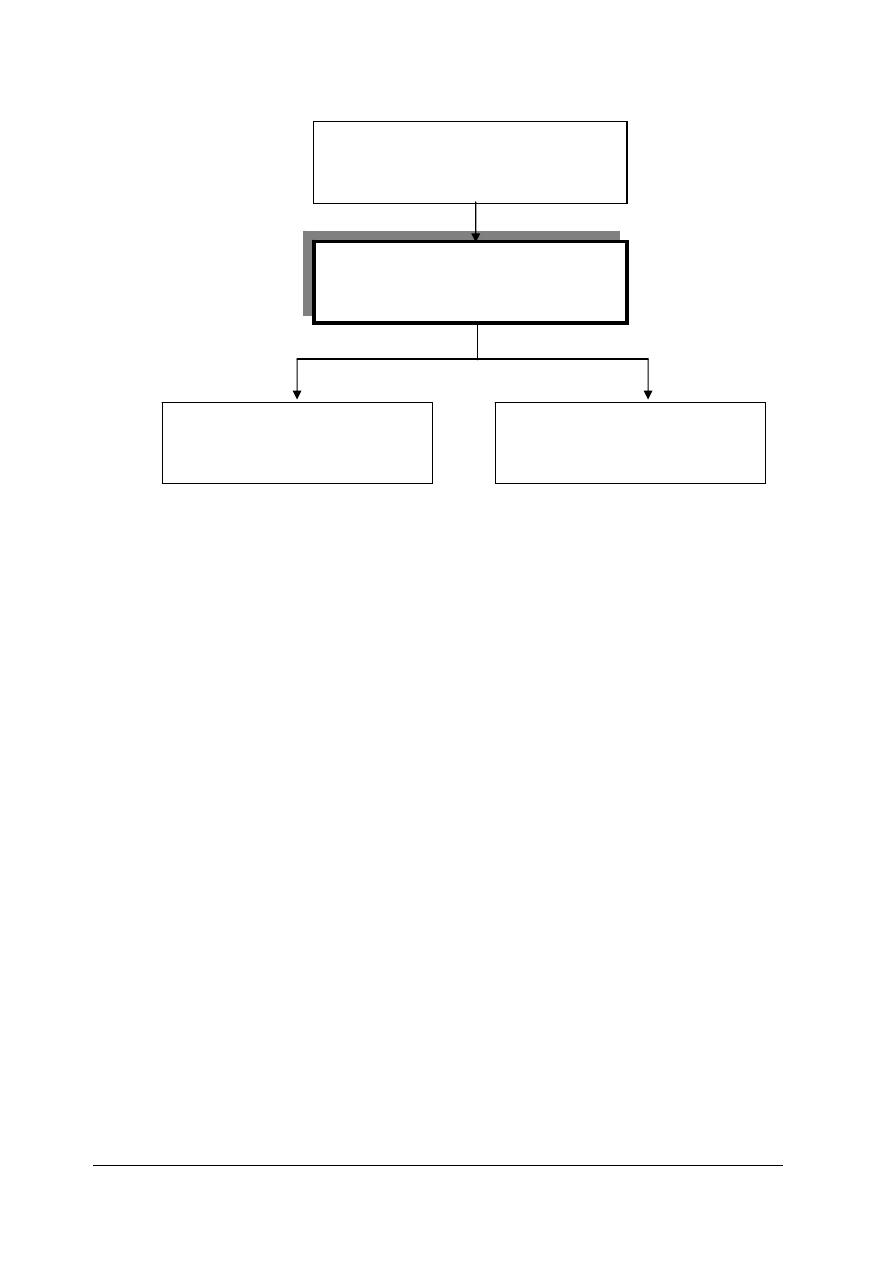
Schemat układu jednostek modułowych dla modułu
„Montowanie i eksploatowanie układów automatyki elektronicznej”
311[07].Z7.03
Badanie układów sterowania
z regulatorami nieciągłymi
Moduł 311[07].Z7
Montowanie i eksploatowanie układów
automatyki elektronicznej
311[07].Z7.01
Montowanie i testowanie połączeń
układów automatyki
311[07].Z7.02
Badanie układów sterowania
z regulatorami ciągłymi

„
Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
5
2. WYMAGANIA WSTĘPNE
Przystępując do realizacji programu jednostki modułowej powinieneś umieć:
− mierzyć podstawowe wielkości elektryczne i parametry elementów elektrycznych,
− dobierać metody i przyrządy pomiarowe,
− przedstawiać wyniki pomiarów w różnej formie,
− interpretować wyniki pomiarów,
− wyjaśniać ogólne zasady działania i bezpiecznego użytkowania podstawowych maszyn
i urządzeń elektrycznych,
− analizować działanie podstawowych elementów i układów elektronicznych,
− klasyfikować elementy i układy automatyki,
− rozróżniać podstawowe człony dynamiczne na podstawie charakterystyk skokowych,
− określać rolę poszczególnych elementów w układach automatycznej regulacji,
− analizować działanie podstawowych układów automatyki,
− korzystać z różnych źródeł informacji o elementach, podzespołach i układach elektronicznych
oraz elementach i układach automatyki,
− rysować schemat blokowy układu automatycznej regulacji,
− klasyfikować układ sterowania,
− klasyfikować układy automatycznej regulacji,
− klasyfikować regulatory,
− charakteryzować parametry sterowników mikroprocesorowych,
− uruchamiać i prezentować układ sterowania,
− sporządzać charakterystyki statyczne i dynamiczne przetworników pomiarowych
i elementów wykonawczych,
− stosować przepisy bezpieczeństwa i higieny pracy podczas montowania
i uruchamiania elementów i urządzeń automatyki.

„
Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
6
3. CELE KSZTAŁCENIA
W wyniku procesu kształcenia powinieneś umieć:
− rozpoznać na schemacie montażowym elementy układu automatyki,
− przyporządkować zaciski urządzenia ich odpowiednikom graficznym na schemacie,
− zmontować układ sterowania na podstawie schematu montażowego,
− wykorzystać połączenia w istniejącym okablowaniu stałym do sterowania zdalnego,
− scharakteryzować zasadę ręcznego sterowania w technice stykowo-przekaźnikowej,
− zastosować odpowiednie metody testowania połączeń obwodów zasilania, obwodów
sygnałów binarnych oraz obwodów z sygnałami analogowymi,
− zbadać poprawność funkcjonowania kompletnego toru wejściowego od czujnika
pomiarowego do zmiennej wewnętrznej urządzenia programowalnego,
− zbadać poprawność funkcjonowania kompletnego toru wyjściowego od zmiennej
wewnętrznej urządzenia programowalnego do urządzenia wykonawczego,
− wymusić odpowiednie działanie urządzeń wyjściowych poprzez forsowanie stanu zmiennych
wyjściowych urządzenia programowalnego,
− napisać prosty program dla sterownika PLC lub ustalić parametry urządzenia
konfigurowalnego w celu przetestowania układu,
− sporządzić dokumentację wykonanych połączeń.
„
Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
7
4. MATERIAŁ NAUCZANIA
4.1. Zasady łączenia urządzeń automatyki przemysłowej
4.1.1. Materiał nauczania
Niezmiernie ważnym zagadnieniem dla prawidłowej pracy układu regulacji automatycznej
jest odpowiedni dobór poszczególnych jego elementów, tzn. urządzenia pomiarowego, urządzenia
wykonawczego i regulatora. Wybór najwłaściwszego dla danych warunków wyposażenia układu
regulacji zależy od wielu czynników, z których należy wymienić m.in.:
− rodzaj regulowanej wielkości,
− jakość regulacji,
− zakresy pomiarowe,
− niezawodność układu w warunkach pracy normalnej i awaryjnej,
− koszty,
− dostępność na rynku.
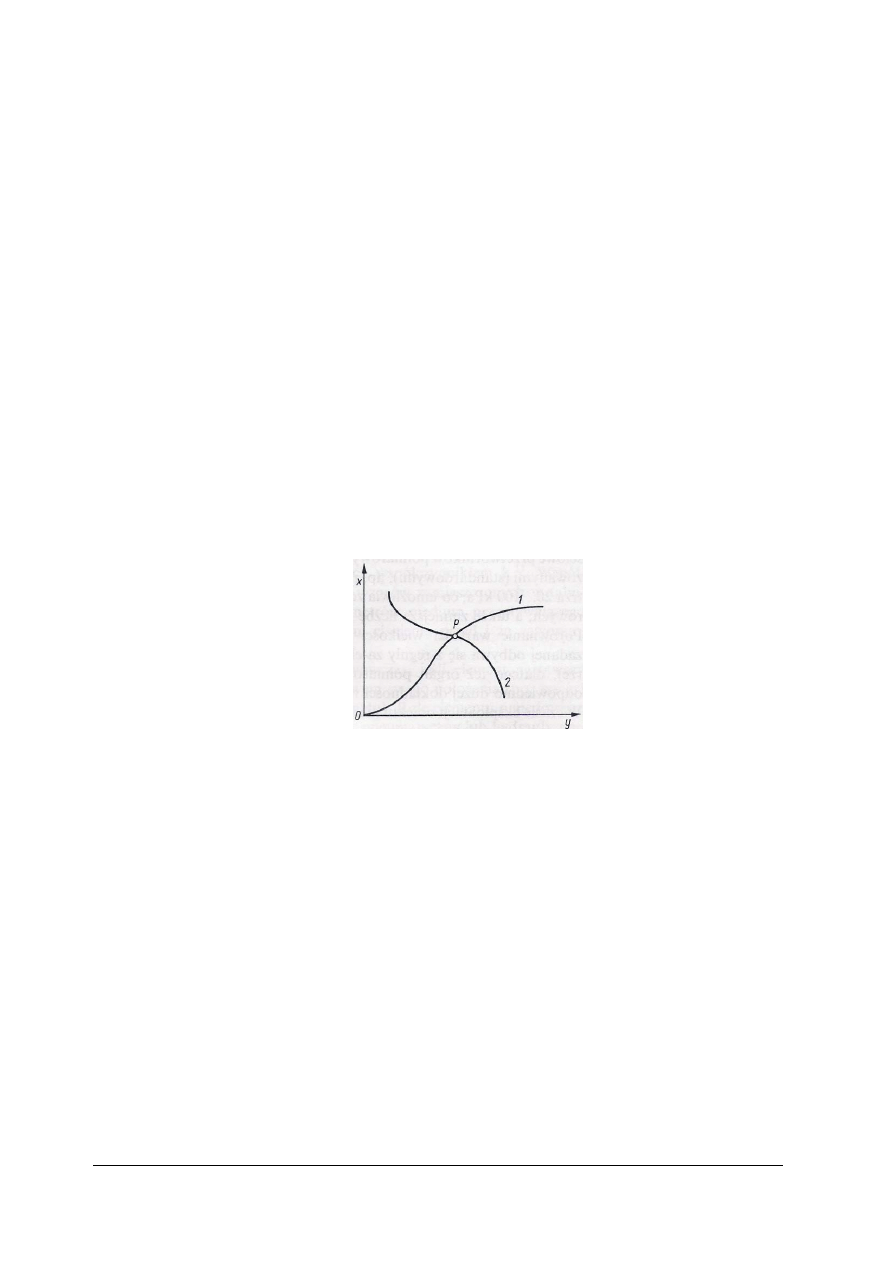
Dobierając poszczególne elementy, w pierwszej kolejności pod kątem ich charakterystyk
statycznych i zakresów wartości wejściowych i wyjściowych, należy mieć na uwadze fakt, że
punkt pracy układu regulacji jest określony przez przecięcie się charakterystyki statycznej obiektu
regulacji i charakterystyki statycznej regulatora (rys. 1).
Rys. 1. Wyznaczenie punktu pracy układu jednowymiarowego [17, s. 73]
1 – charakterystyka statyczna obiektu, 2 – charakterystyka statyczna regulatora, P – punkt pracy statycznej
Charakterystyki statyczne x =f(y) określają występującą w stanie ustalonym zależność między
wielkością oddziałującą y a wielkością będącą skutkiem tego oddziaływania x. Zakłócenia
oddziałujące na obiekt mogą powodować przesuwanie charakterystyki statycznej (podobnie jak
przesuwa się punkt pracy na charakterystyce roboczej w układach tranzystorowych pod wpływem
zmian temperatury). W najniekorzystniejszym przypadku punkt pracy układu regulacji może się
więc znaleźć w obszarze nasycenia charakterystyki regulatora, co uniemożliwi jakiekolwiek
oddziaływanie regulatorów na wielkość nastawianą.
Układ regulacji musi być stabilny. Układ niestabilny nie nadaje się do zastosowań
praktycznych, gdyż nie jest w stanie zrealizować zadania sterowania, może także spowodować
uszkodzenie obiektu regulacji.
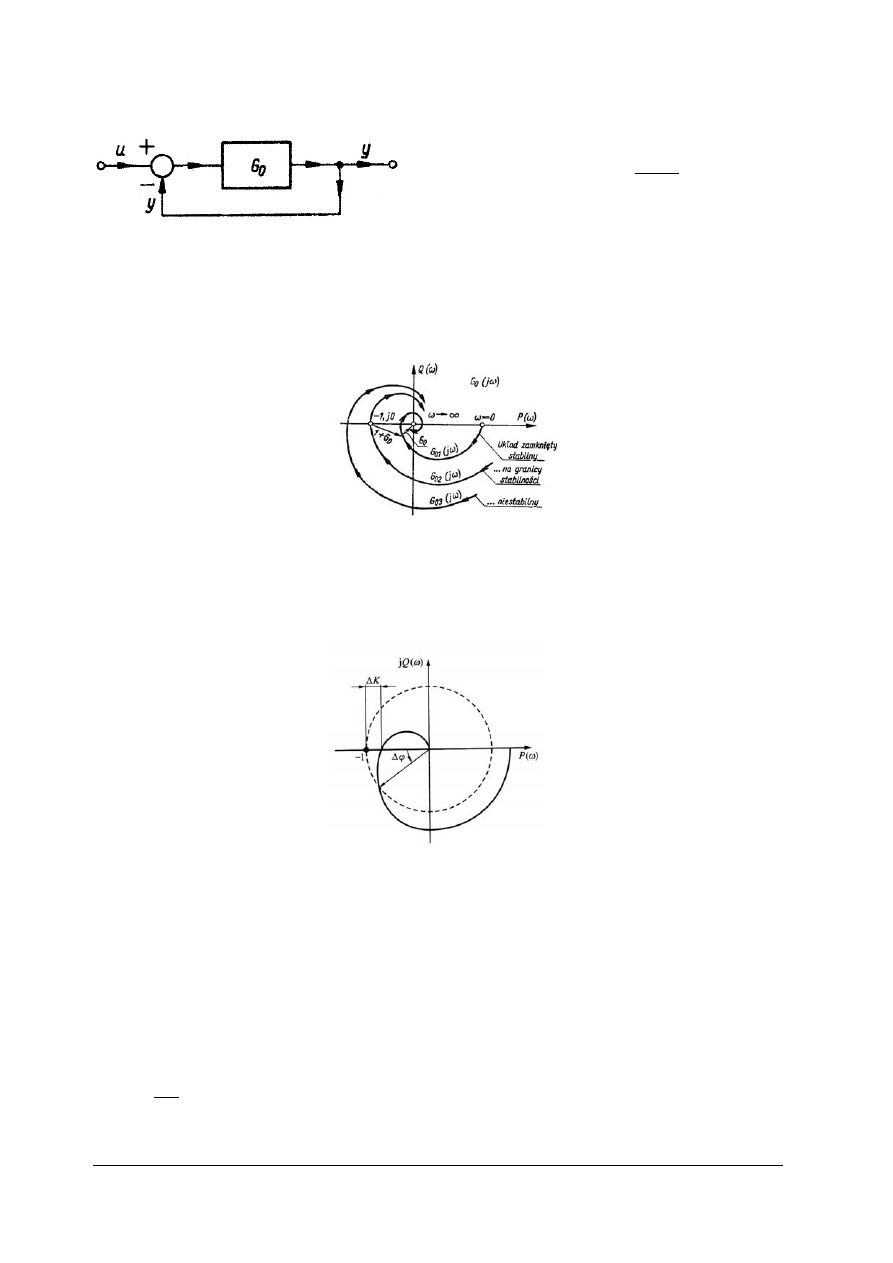
Jedną z najbardziej znanych metod sprawdzania stabilności układów jest tzw. kryterium
Nyquista. Kryterium to należy do grupy kryteriów częstotliwościowych, opartych
na charakterystykach częstotliwościowych układów. Kryterium to dotyczy ważnego przypadku
badania stabilności układu zamkniętego (rys. 2) na podstawie charakterystyki G
o
(jω) układu
otwartego.
„
Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
8
Transmitancję G takiego układu wyraża wzór
G =
0
0
G
1
G
+
przy czym G
o
– transmitancja układu otwartego.
Rys. 2. Układ regulacji [3, s. 49]
Warunek kryterium Nyquista można sformułować następująco: Układ zamkniętej regulacji
jest stabilny, jeżeli charakterystyka amplitudowo-fazowa G
o
(jω) układu otwartego nie obejmuje
punku (-1, j0) przy zmianie częstotliwości od 0 do
∞ (rys.3).
Rys. 3. Kryterium Nyquista [3, s. 64]
Poza sprawdzeniem warunku stabilności na wykresie amplitudowo-fazowym sprawdza się
także zapas fazy (∆φ) i zapas wzmocnienia (∆K) dla charakterystycznych punktów,
odpowiadających przecięciu przez wykres koła o promieniu jednostkowym i przecięciu osi
rzeczywistej w obszarze objętym przez to koło (rys.4).
Rys. 4. Określenie zapasów modułu i fazy [2, s. 31]
Korekta przebiegu częstotliwościowej charakterystyki amplitudowo-fazowej układu
otwartego jest dokonywana przy zastosowaniu regulatora o odpowiednio dobranej transmitancji.
Najczęściej stosuje się regulatory typu: proporcjonalnego (P), całkującego (I), proporcjonalno
-całkującego (PI), proporcjonalno-różniczkującego (PD) oraz proporcjonalno-całkująco-
-różniczkującego (PID).
Regulator proporcjonalny P charakteryzuje się tym, że wartość sygnału wyjściowego
regulatora jest proporcjonalna do wartości uchybu regulacji. Parametrem nastawialnym regulatora
jest wzmocnienie K
p
, Zamiast wzmocnienia K
p
często używa się jego odwrotność
x
p
=
p
K
1
100%, zwaną zakresem proporcjonalności i wyrażoną w procentach. Zakres
„
Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
9
proporcjonalności jest to przyrost sygnału wejściowego niezbędny do uzyskania pełnego zakresu
zmian sygnału wyjściowego.
Regulator całkujący I charakteryzuje się tym, że prędkość zmian sygnału wyjściowego jest
proporcjonalna do wartości uchybu regulacji. Parametrem charakterystycznym regulatora
całkującego jest czas całkowania T
i
określony jako czas po którym sygnał wyjściowy po skokowej
zmianie uchybu regulacji osiągnie wartość równą wartości skoku.
Regulator proporcjonalno-całkujący PI charakteryzuje się tym, że sygnał wyjściowy jest sumą
działania proporcjonalnego i całkującego. Regulator ma dwa parametry nastawialne: wzmocnienie
K
p
czas całkowania T
i
.
Regulator proporcjonalno-różniczkujący PD powstaje przez dodanie do działania
proporcjonalnego działania różniczkującego. Działanie różniczkujące regulatora polega na tym, że
wartość sygnału wyjściowego jest proporcjonalna do prędkości zmian uchybu regulacji.
Parametrem charakterystycznym regulatora jest czas różniczkowania T
d
.
Działanie układów regulacji z przedstawionymi powyżej regulatorami zależy od doboru
parametrów (nastaw) tych regulatorów.
W produkowanych regulatorach uniwersalnych stosowane są najczęściej następujące zakresy
zmian poszczególnych parametrów:
− zakres proporcjonalności x
p
w granicach 3
÷ 400%
− czas zdwojenia T
i
w granicach 3 s
÷ 30 min,
− czas wyprzedzania T
d
w granicach 0
÷ 15 min.
Stosowanie w torze sterowania regulatora ma na celu nie tylko uzyskanie stabilnej pracy
układu regulacji, ale również odpowiedniej jakości przebiegu wielkości regulowanej
oraz kompensacji zakłóceń.
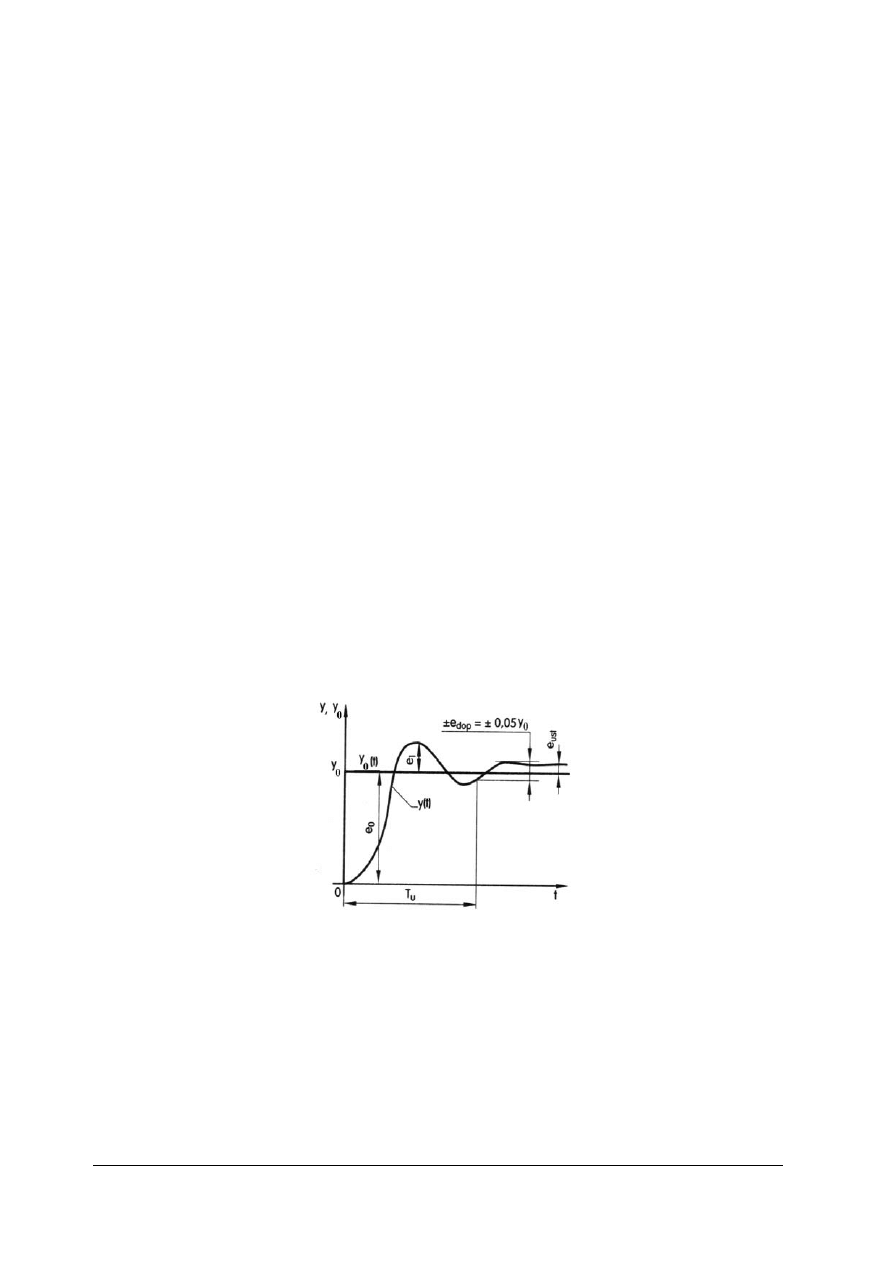
Dokładność statyczną określa się na podstawie uchybu statycznego. Uchyb statyczny e
ust
jest
to maksymalna różnica między wartością sygnału wyjściowego y z obiektu regulacji, a wartością
zadaną y
0
w stanie ustalonym (rys.5):
y
y
e
0
ust
−
=
.
Rys. 5. Przebieg przejściowy wielkości regulowanej w odpowiedzi na wymuszenie skokowe y
0
(t) = y
0ust
[19, s. 48]
Jakość dynamiczną określa się na podstawie: czasu regulacji, odchylenia maksymalnego oraz
przeregulowania (rys. 5).
W tabeli 1 przedstawiono odpowiedzi układów regulacji ma wymuszenia skokowe,
w zależności od miejsca wprowadzenia wymuszenia skokowego (na wejściu do obiektu lub na
wejściu do regulatora) oraz od rodzaju zastosowanych regulatorów – statycznych (P, PD) lub
astatycznych (I, PI, PID). Cechą charakterystyczną układów z regulatorami statycznymi jest
obecność uchybu statycznego e
ust.
W przypadku stosowania regulatorów zawierających człon
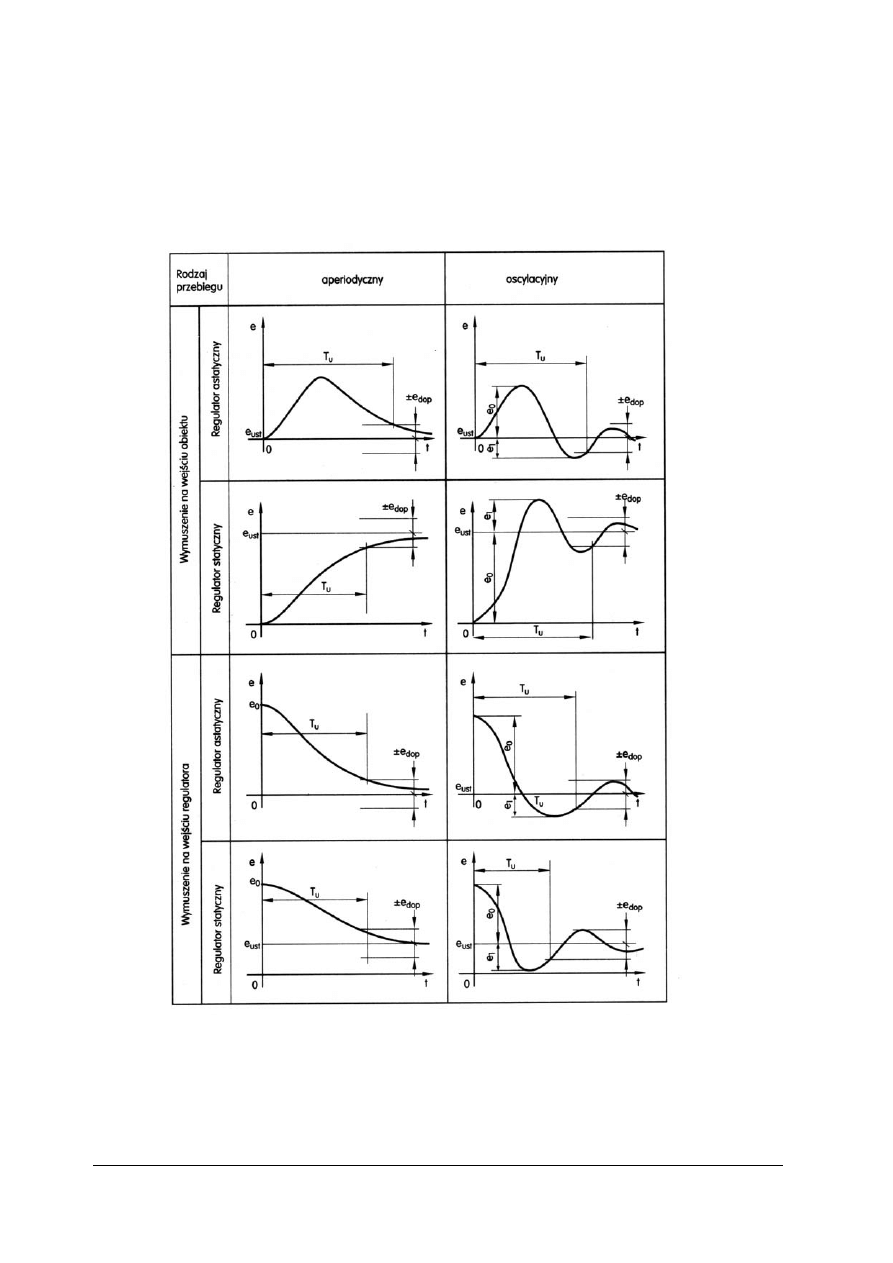
„
Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
10
całkujący uchyb statyczny nie występuje. Przy stosowaniu regulatorów PI procesy przejściowe
zachodzą znacznie wolniej niż przy stosowaniu regulatorów typu P. Stosując regulator PID
możemy uzyskać stosunkowo szybki przebieg procesu przejściowego oraz uchyb statyczny równy
zero.
Tabela 1. Odpowiedzi układu regulacji na wymuszenie skokowe na wejściu obiektu oraz na wejściu regulatora [19,
s. 49]
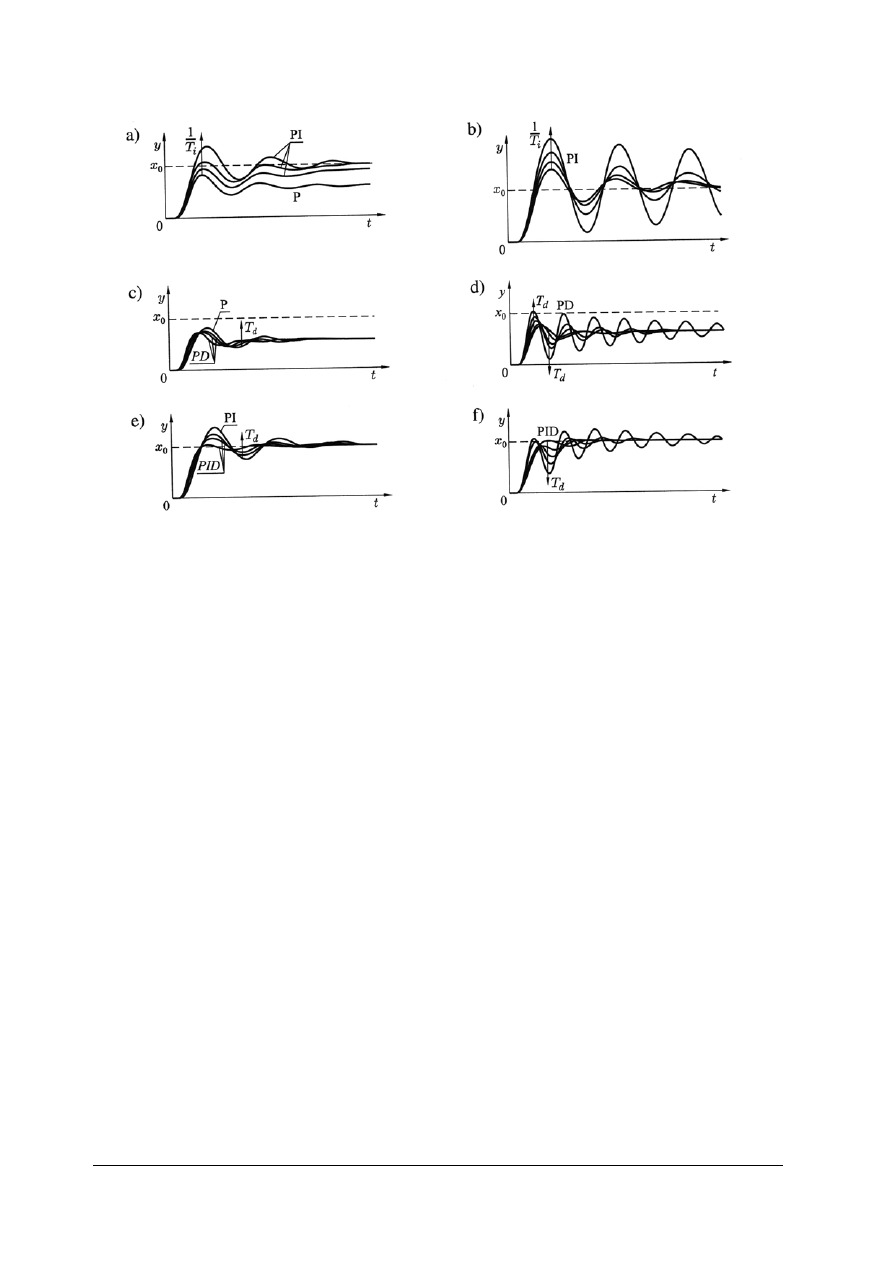
Ocena przydatności danego typu regulatora oparta na przebiegach odpowiedzi skokowej
układu regulacji, wymaga również porównania odpowiedzi skokowych przy różnych wartościach
nastaw regulatorów, ponieważ na charakter przebiegów oprócz typu regulatora mają również
wpływ wartości nastaw regulatora (rys. 6).
„
Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
11
Rys. 6. Właściwości dynamiczne układu regulacji z obiektem statycznym: a), b) - wpływ doboru czasu
zdwojenia T
i
, c), d), e), f) - wpływ doboru czasu wyprzedzania T
d
[16, s. 84]
Jeżeli charakterystyka dynamiczna obiektu jest nieznana to nastawy regulatorów dobiera się
w sposób doświadczalny metodą opartą na regułach Zieglera i Nicholsa.
Stosując powyższą metodę należy wykonać kolejno następujące czynności:
− regulator włączyć tylko na działanie proporcjonalne (nastawnik zespołu całkującego zamknąć
całkowicie -
∞
→
i
T
, a nastawnik zespołu różniczkującego otworzyć całkowicie 0
T
d
→ ),
− zwiększyć wzmocnienie proporcjonalne k
p
tak, aby układ doprowadzić do granicy stabilności
(przebieg wielkości regulowanej oscylacyjny o stałej amplitudzie), a nastawioną wartość X
p
oznaczyć jako X
p
kryt
,
− z wyznaczonego przebiegu wielkości regulowanej określić okres drgań T
kryt
,
− znając X
p
kryt
i T
kryt
obliczyć nastawy regulatora według następujących wzorów:
− dla regulatora typu P
k
p
= 0,5 K
kryt
− dla regulatora typu PI
k
p
= 0,45 K
kryt;
T
i
= 0,85 T
kryt
− dla regulatora typu PID k
p
= 0,6 K
kryt;
T
i
= 0,5 T
kryt;
T
d
= 0,12 T
kryt.
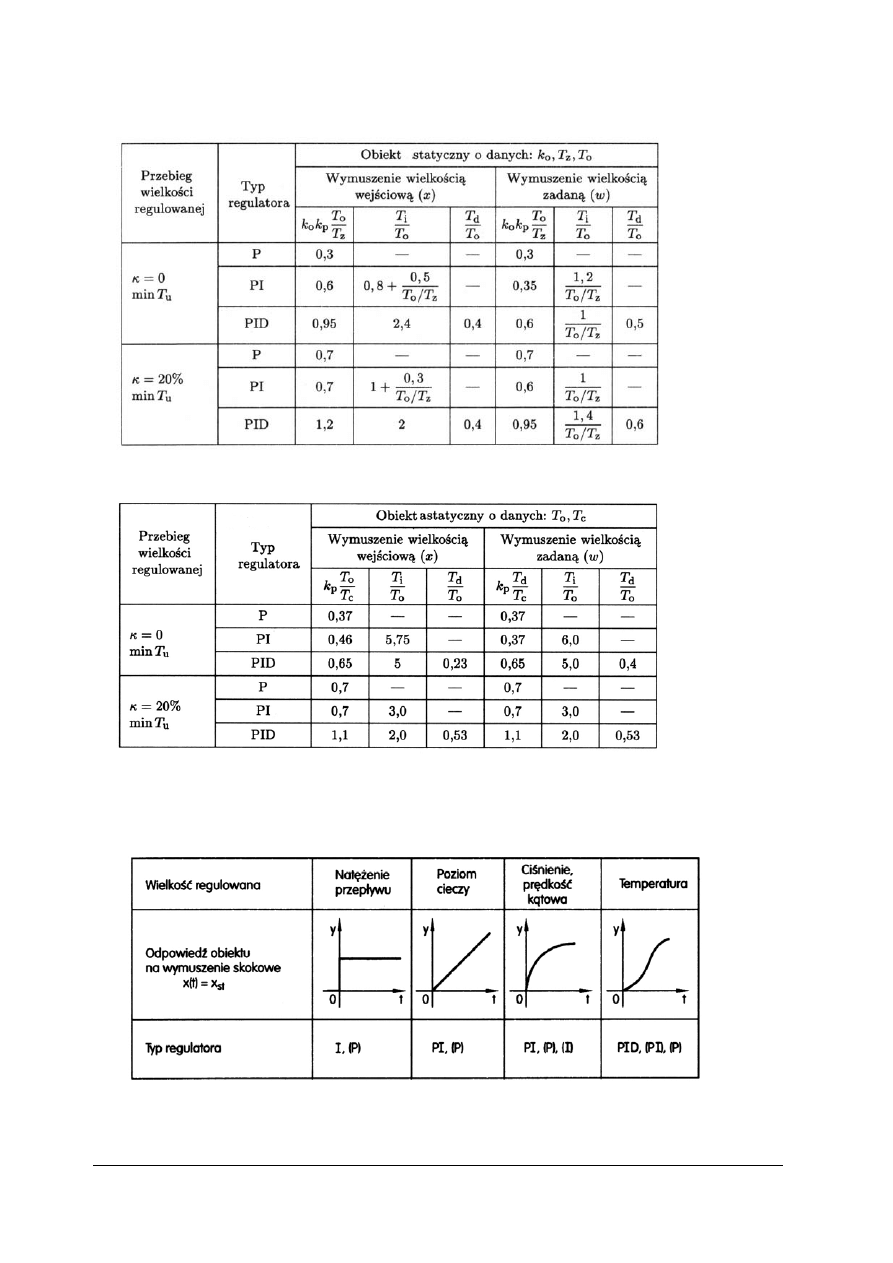
W przypadku, gdy jest znana charakterystyka dynamiczna obiektu (dla statycznego- inercja
z opóźnieniem – parametry k
0
, T
0
, T
z
lub dla astatycznego - całkowanie z opóźnieniem -
parametry T
0,
T
c
) nastawy regulatorów można obliczyć korzystając ze wzorów zamieszczonych
w tabelach 2 i 3.
„
Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
12
Tabela 2. Dobór nastaw regulatorów w układzie z obiektem statycznym [19, s.51]
Tabela 3. Dobór nastaw regulatorów w układzie z obiektem astatycznym [19, s.52]
Praktycznie, w zależności od wielkości regulowanej oraz właściwości obiektu, dobór
regulatorów odbywa się według tabeli 4.
Tabela 4. Dobór regulatora w zależności od wielkości regulowanej i od właściwości obiektu [19 , s. 48]
„
Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
13
Urządzenie pomiarowe stanowi tę część układu regulacji automatycznej, której zadaniem jest
przetworzenie wielkości regulowanej na sygnał dogodny do wprowadzenia do regulatora.
Urządzenia pomiarowe może składać się z samego czujnika lub czujnika z przetwornikiem
pomiarowym (rys. 7).
UP
≡
Rys. 7. Urządzenie pomiarowe UP; Cz – czujnik, PP – przetwornik pomiarowy [17, s. 74]
Sygnałem pochodzącym od czujnika może być siła elektromotoryczna, napięcie przemienne,
rezystancja, siła lub przesunięcie. Postać sygnału wyjściowego urządzenia pomiarowego powinna
być dopasowana do technicznego rozwiązania układu wejściowego i porównującego regulatora
(pneumatyczny, hydrauliczny lub elektryczny). Zastosowanie przetwornika pomiarowego pozwala
przetworzyć wielkość wyjściową z czujnika na wielkość zgodną ze standardem regulatora.
Porównanie wartości wielkości regulowanej z wartością wielkości zadanej odbywa się
z reguły za elementem pomiarowym (w regulatorze), dlatego też urządzenie pomiarowe powinno
zapewnić osiągnięcie odpowiednio dużej dokładności i jakości przetwarzania.
W czasie eksploatacji obiektu nieraz zachodzi potrzeba zmiany wielkości zadanej układu.
Granica przedziału zmian wielkości zadanej określana jest właściwościami procesu i warunkami
jego poprawnego prowadzenia. Wynika stąd następne wymaganie, aby zakres pracy urządzenia
pomiarowego obejmował cały zakres (przedział) zmian wartości wyjściowej. Natomiast na jakość
regulacji duży wpływ mają również właściwości dynamiczne czujnika.
Urządzenie wykonawcze składa się zazwyczaj z trzech elementów: wzmacniacza mocy,
elementu napędowego oraz elementu nastawczego (rys. 8).
UW
≡
Rys. 8. Urządzenie wykonawcze UW [17, s. 74]
W – wzmacniacz, NP. – element napędowy, NS – element nastawczy
Element napędowy nazywa się często siłownikiem. Zadaniem elementu nastawczego jest
oddziaływanie na strumień materiałowo-energetyczny procesu. Elementem nastawczym może być
zawór lub zasuwa w rurociągu, dozownik materiału sypkiego, pompa o zmiennej wydajności, itp.
Prawidłowy dobór elementu nastawczego powinien zapewnić uzyskanie potrzebnego zakresu
wartości wielkości nastawiającej. Dla zaworu np. należy tak dobrać jego wymiary, aby sterowanie
strumieniem przebiegało w zakresie wartości określonych obciążeniem obiektu. W tym celu
należy dopasować wymiary zaworu do oporów hydraulicznych i rozkładów ciśnień w rurociągu.
Element napędowy jest używany wówczas, jeśli element nastawczy oddziaływa na obiekt
za pośrednictwem swego położenia (np. zawór) lub prędkość ruchu (np. dozownik pyłu
w układzie regulacji temperatury komory nagrzewanej pyłem węglowym). Rolę elementu
napędowego spełnia najczęściej silnik elektryczny, pneumatyczny lub hydrauliczny. W przypadku
gdy moc wyjściowa regulatora jest za mała do bezpośredniego zasilania lub sterowania elementu
napędowego, konieczne staje się użycie oddzielnego wzmacniacza mocy. Występuje to często
UP
Cz
PP
UW
W
NP
NS
„
Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
14
w przypadkach stosowania regulatorów elektrycznych, a zawsze – w regulatorach
pneumatycznych.
Tabela 5. Zestawienie cech poszczególnych systemów elementów automatyki [17, s. 72]
System elementów hydraulicznych
Zalety Wady
1. Prostota konstrukcji, łatwość obsługi,
pewność ruchowa.
2. Samosmarowność i duża trwałość.
3. Stosunkowo duże siły i moce siłowników.
4. Dobre właściwości regulacyjne, głównie
dzięki nieściśliwości cieczy, będącej
nośnikiem energii, przez co do układu nie
wprowadza się opóźnień.
1. Stosunkowo duże wymiary i masa.
2. Konserwacje i naprawy wymagają
kwalifikowanego personelu.
3. Ograniczenie w rozmieszczeniu
poszczególnych elementów. Odległość
pomiędzy regulatorem i siłownikiem nie
powinna przekraczać 100 m. Siłownik
powinien być umieszczony niżej od
wzmacniacza, aby nie powodować
zapowietrzenia się układu, co wprowadza
niekorzystne luzy i opóźnienia.
4. Nieszczelność przewodów sprawia, że olej
płynący pod ciśnieniem wycieka, powodując
straty oraz zanieczyszczenie otoczenia, co
może być przyczyną pożaru.
System elementów pneumatycznych
1. Dogodna forma nośnika energii. Upływ
powietrza nie pociąga za sobą strat i nie
stwarza zagrożenia pożarowego.
2. Odporność na wpływ pyłów i związków
agresywnych wnętrz urządzeń.
3. Sygnał regulacyjny jest przesyłany jednym
przewodem.
4. Małe wymiary i znikoma masa elementów.
5. Prostota konstrukcji oraz pewność ruchowa.
6. Łatwość dokonywania operacji
matematycznych na sygnałach (sumowanie,
mnożenie, itp.).
7. Stosunkowo proste kształtowanie
właściwości dynamicznych regulatorów,
dzięki łatwej możliwości stosowania
sprzężeń zwrotnych.
1. Konieczność dokładnego oczyszczenia
powietrza.
2. Konserwacje i naprawy wymagają
kwalifikowanego personelu.
3. Praktycznie uzyskiwane moce są mniejsze
niż w siłownikach hydraulicznych.
4. Odległość przesyłania sygnałów jest do ok.
300 m.
5. Ściśliwość powietrza, która jest korzystna
przy kształtowaniu właściwości
dynamicznych za pomocą sprzężeń
zwrotnych, wprowadza opóźnienia
w obwodzie regulacji, szczególnie przy
większych odległościach.
System elementów elektrycznych
1. Dogodny charakter energii, która jest łatwo
dostępna.
2. Bardzo wygodne i dokładne pomiary
elektryczne.
3. Przesyłanie sygnału może się odbywać na
dowolne odległości i nie pociąga za sobą
praktycznie opóźnień.
4. Prowadzenie torów przewodów
elektrycznych jest znacznie prostsze i tańsze
niż przewodów pneumatycznych
i hydraulicznych.
1. Skomplikowana budowa, szczególnie
elementów elektronicznych, co wymaga
personelu o wysokich kwalifikacjach.
2. Nieco wyższy koszt w stosunku do
urządzeń hydraulicznych i pneumatycznych.
3. Gorsze właściwości siłowników.
4. Ograniczony zakres stosowania
w warunkach, w których istnieje
niebezpieczeństwo wybuchu lub
konieczność stosowania elementów
w wykonaniu iskrobezpiecznym.
„
Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
15
5. Najszerszy zakres zastosowań pod
względem mocy i rodzaju parametru
regulowanego.
6. Szerokie możliwości centralizacji
pomiarów, rejestracji, współpracy
z komputerami sterującymi procesami.
Uniwersalne systemy aparatury automatyki umożliwiają dobieranie zestawów aparatury
do konkretnych zadań. Poszczególne urządzenia muszą być przystosowane do współdziałania
z dużą liczbą innych urządzeń wchodzących w skład systemu. Podstawowe znaczenie ma
operowanie standardowymi sygnałami w ramach systemu lub jego części. Dzięki przyjęciu
sygnałów standardowych dowolny przetwornik pomiarowy o wyjściu elektrycznym może być
dołączony do dowolnego regulatora elektrycznego, a regulator do urządzenia wykonawczego bądź
innego regulatora.
Sygnały standardowe stosuje się w centralnej części systemu, np. sygnały czujników
pomiarowych nie są sygnałami standardowymi, natomiast są nimi sygnały wyjściowe
przetworników pomiarowych. Podobnie elementy wykonawcze (z wyjątkiem siłowników
pneumatycznych niskociśnieniowych) nie są sterowane bezpośrednio sygnałami standardowymi,
ale poprzez sterowniki lub wzmacniacze mocy.
W niektórych dziedzinach automatyki standardy sygnałów przyjęły się w niewielkim stopniu,
w innych przyjęły się niemal powszechnie. Na przykład nie ma standardowych sygnałów
hydraulicznych, natomiast w zakresie sygnałów pneumatycznych jest powszechnie przyjęty
standard sygnału analogowego 20
÷ 100 kPa (ok. 0,2 ÷ 1 atm).
W elektrycznej aparaturze automatyki są stosowane przede wszystkim sygnały analogowe
prądu stałego i napięcia stałego (tabela 6).
Tabela 6. Podstawowe standardy sygnałów elektrycznych ciągłych [16, s. 154]
0
÷ 5 mA
0
÷ 20 mA
0
÷ 100 mA
lub od – 5 do +5 mA
lub od –20 do +20 mA
lub od –100 do +100 mA
Prąd stały
1
÷ 5 mA
4
÷ 20 mA
0
÷ 5 V
0
÷ 10 V
lub od –10 do + 10 V
Napięcie stałe
1
÷ 5 V
Rezystancja wejściowa i wyjściowa układu musi spełniać określone warunki. Przykładowo,
dla sygnału prądowego o natężeniu zawierającym się w granicach od 0 do 20 mA i od 4
do 20 mA, rezystancja wejściowa nie powinna być większa niż 250 Ω, a rezystancja obciążenia
- niż 500 Ω (odbiorniki łączy się szeregowo), natomiast dla sygnału o napięciu zawierającym się
w granicach od 0 do 5 V i od 1 do 5 V rezystancja wejściowa nie powinna być mniejsza niż
10 kΩ, a rezystancja obciążenia – niż 1 kΩ (odbiorniki łączy się równolegle).
Dodatkowe wymagania standardu obejmują wartości maksymalne napięć, jakie mogą
wystąpić w przypadku rozwarcia obwodów z sygnałem prądowym, wartości maksymalne prądów,
jakie mogą wystąpić w przypadku zwarcia obwodów z sygnałem napięciowym, a także zasady
uziemiania, tworzenia wspólnych punktów sygnałowych i in.
W aparaturze do sterowania procesów wolnozmiennych stosuje się najczęściej sygnały
jednobiegunowe prądu stałego o natężeniu od 0 do 20 mA i od 4 do 20 mA. Sygnały
te zapewniają większą odporność na zakłócenia niż sygnały napięciowe. Zapewnienie należytej
odporności na zakłócenia stanowi niekiedy poważny problem, zwłaszcza przy długich

„
Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
16
połączeniach, np. między przetwornikiem pomiarowym a regulatorem. W przeciętnych warunkach
sygnał prądu stałego przesyła się linią o długości równej kilka kilometrów. Przy większych
odległościach bądź silniejszych zakłóceniach stosuje się specjalne techniki przesyłania sygnałów.
Sygnał o natężeniu prądu od 4 do 20 mA umożliwia wykrycie przerwania połączenia (linii).
Niekiedy stosuje się kilka różnych postaci sygnałów, np. sygnały wejściowe regulatorów są
zazwyczaj sygnałami prądowymi, sygnały wewnętrzne regulatorów i i innych urządzeń części
centralnej – sygnałami napięciowymi, sygnały wyjściowe przesyłane do urządzeń wykonawczych
– prądowymi. W układach regulacji procesów szybkozmiennych stosuje się częściej sygnały
dwubiegunowe oraz prądu przemiennego.
Przesyłanie sygnałów na duże odległości w celu sterowania i kontroli procesów
technologicznych nazywa się telemechaniką.
W telemechanice kładzie się nacisk na szybkość przesyłania sygnałów i odporność systemów
na zakłócenia. Wyróżnia się:
− telemetrię – zdalne pomiary,
− telesterowanie – zdalne sterowanie,
− telesygnalizację – zdalną sygnalizację.
Urządzenia telemechaniki to wyłącznie urządzenia elektroniczne i elektryczne.
Coraz częściej informacje przesyłane są światłowodami. Jeśli chodzi o sygnały elektryczne, to
w systemach analogowych stosuje się sygnały impulsowe z modulacją PWM i sygnały napięcia
przemiennego z modulacją FM.
W systemie analogowym o modulowanej częstotliwości sygnałowi wejściowemu
stałoprądowemu, o natężeniu zawartym w granicach od 4 do 20 mA, może odpowiadać sygnał
przemienny, o częstotliwości zmienianej płynnie w zakresie od 500 do 2500 Hz. W wielu
przypadkach systemy analogowe zastępowane są systemami cyfrowymi. W systemach cyfrowych
z modulacją częstotliwości nie wykorzystuje się całego pasma częstotliwości (500 ÷ 2500 Hz)
lecz dwie częstotliwości dość odległe od siebie, którym odpowiadają sygnały 0 logiczne
i 1 logiczne.
W tym przypadku sygnały analogowe przetwarzane są na cyfrowe za pomocą przetworników
A/C.
Cyfrowe systemy przesyłania informacji charakteryzują się większą odpornością na
zakłócenia niż systemy analogowe. Dodatkową zaletą jest możliwość bezpośredniej współpracy
z systemami komputerowymi, przez modem lub kartę sieciową.
Największą odpornością na zakłócenia charakteryzują się systemy optoelektroniczne, które
wykorzystują falę elektromagnetyczną o długościach λ > 850 nm do transmisji sygnałów
światłowodami. Sposób przekazywania sygnałów za pomocą światłowodów jest
najbezpieczniejszy (odporny na zakłócenia, próby ingerencji w zawartość przesyłanych
informacji), najpewniejszy (nie ma możliwości zakłócenia sygnału), a przy zastosowaniu źródeł
sygnału o stosunkowo małych mocach, umożliwia transfer danych na odległości kilkuset km, bez
konieczności stosowania dodatkowych wzmacniaczy.
Telemechanika jest stosowana w różnych gałęziach przemysłu. Trudno sobie wyobrazić
działanie systemu elektroenergetycznego bez urządzeń telemetrii, kolejnictwa bez urządzeń
telesygnalizacji i telesterowania, itd.
Jedną z największych zdobyczy telemechaniki jest możliwość sterowania i nadzorowania
wielu obiektów z jednego miejsca. Struktura systemu telemechaniki zależy od zadań jakie ma
spełniać system, jak i struktury obiektu.
„
Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
17
4.1.2. Pytania sprawdzające
Odpowiadając na pytania sprawdzisz, czy jesteś przygotowany do wykonania ćwiczeń.
1. Jaki czynniki decydują o wyposażeniu układu regulacji?
2. Do oceny czego służy kryterium Nyquista?
3. Jakie znasz podstawowe typy regulatorów analogowych?
4. Jakie są kryteria jakości układów automatycznej regulacji?
5. Co to jest czas regulacji T
u
?
6. Co to jest przeregulowanie κ?
7. Kiedy stosujemy dobór nastaw regulatora według zasady Zieglera i Nicholsa?
8. Jakie zadania stawiane są organom pomiarowym?
9. Jakie właściwości są charakterystyczne dla organów wykonawczych?
10. Jakie znaczenie praktyczne ma standaryzacja sygnałów?
11. Jaką istotną, dodatkową funkcję spełniają sygnały prądowe zawarte w zakresie 4 ÷ 20 mA?
12. Jakie zalety wynikają z zastosowania do transmisji sygnałów cyfrowych?
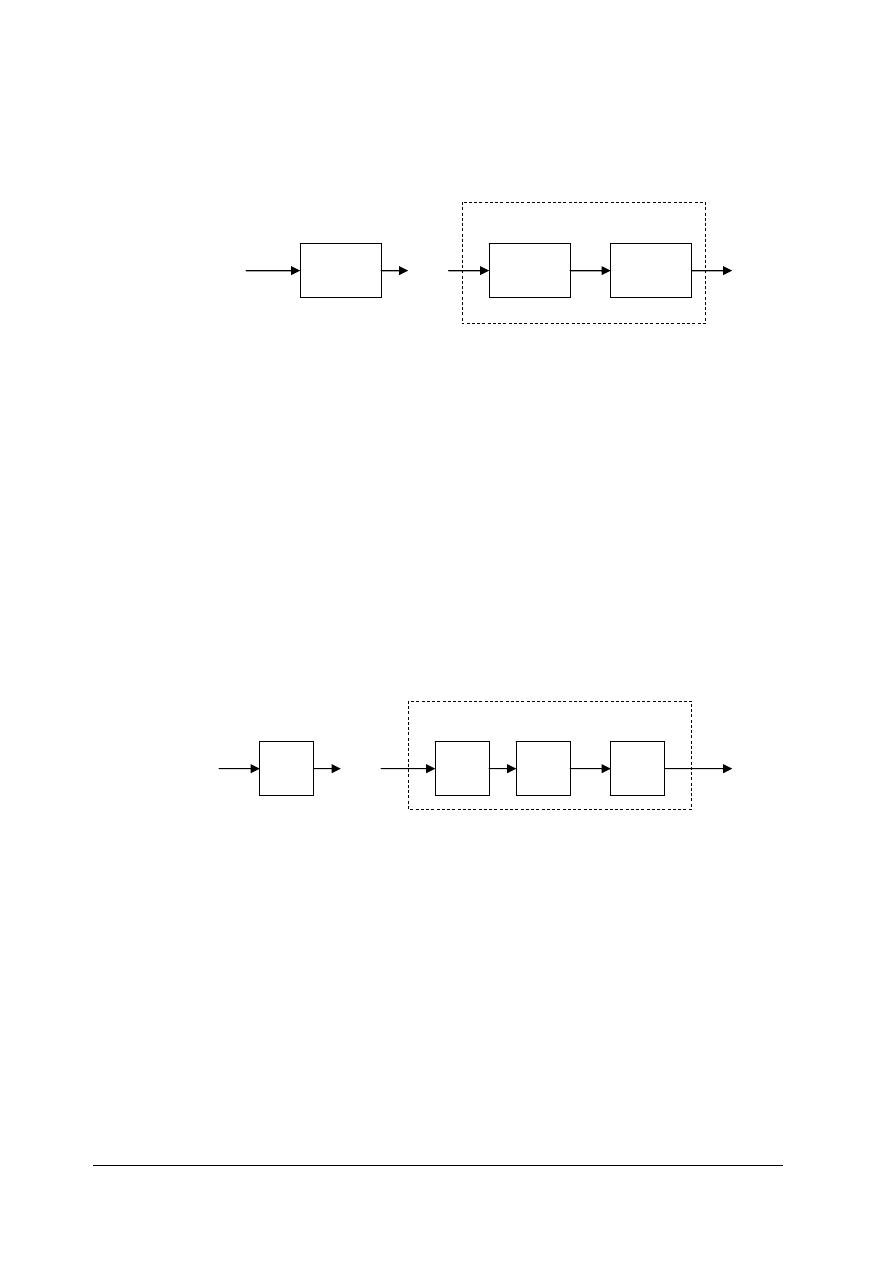
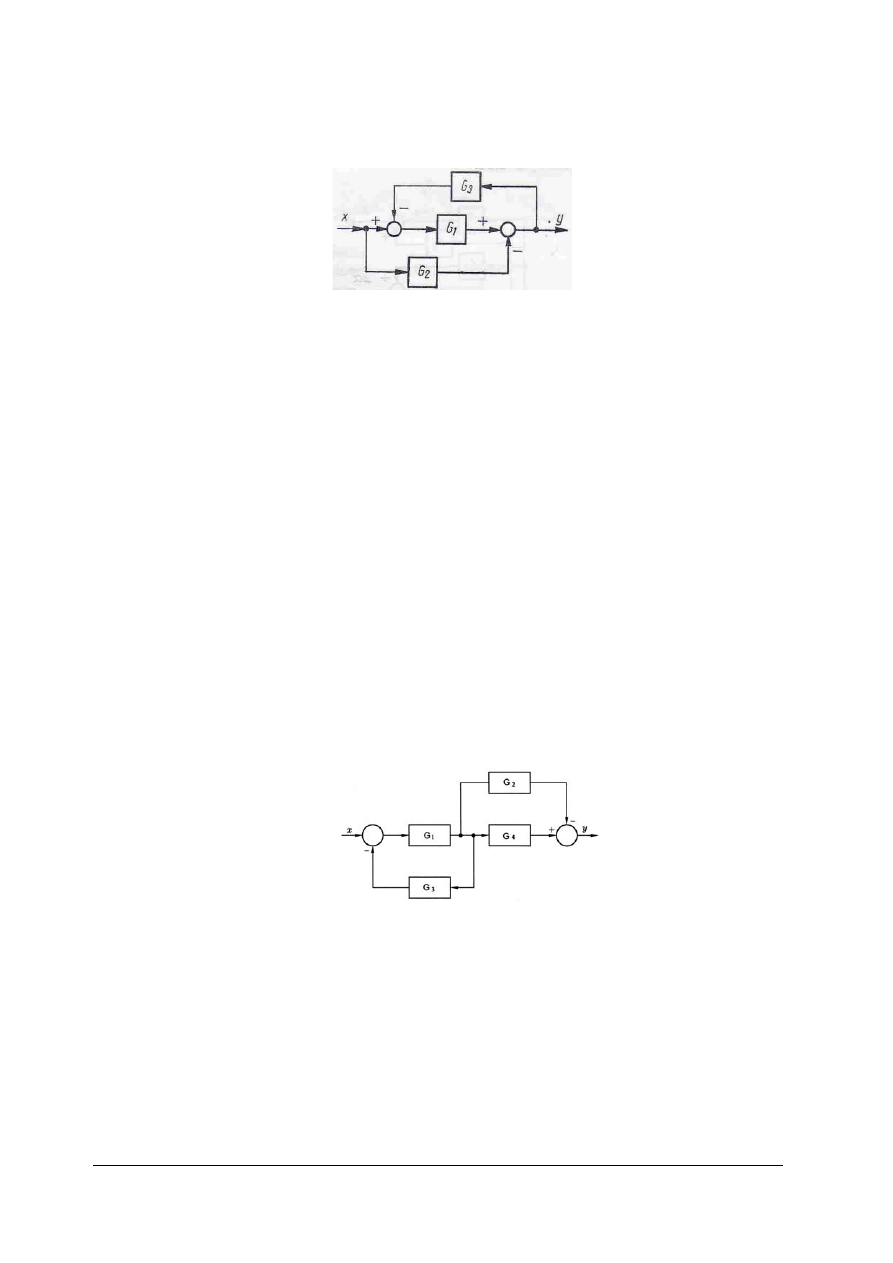
4.1.3. Ćwiczenia
Ćwiczenie 1
Wyznacz transmitancję zastępczą
x
y
G
=
układu, którego schemat strukturalny przedstawia
rysunek do ćwiczenia 1.
Rysunek do ćwiczenia 1. Schemat strukturalny
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie powinieneś:
1) zapoznać się z instrukcją wykonania ćwiczenia,
2) zorganizować stanowisko pracy do wykonania ćwiczenia,
3) przesunąć węzeł 1 przed węzeł 2,
4) przekształcić tak układ, by otrzymać połączenie szeregowe elementów,
5) wykonać obliczenia,
6) zaprezentować wykonane ćwiczenie,
7) dokonać oceny poprawności wykonanego ćwiczenia,
8) sporządzić sprawozdanie z przebiegu ćwiczenia, załączając schematy układu, otrzymane
wyniki, obliczenia i wnioski z badań.
Wyposażenie stanowiska pracy:
− instrukcja ćwiczenia,
− notatnik,
− literatura z rozdziału 6 wskazana przez nauczyciela.
„
Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
18
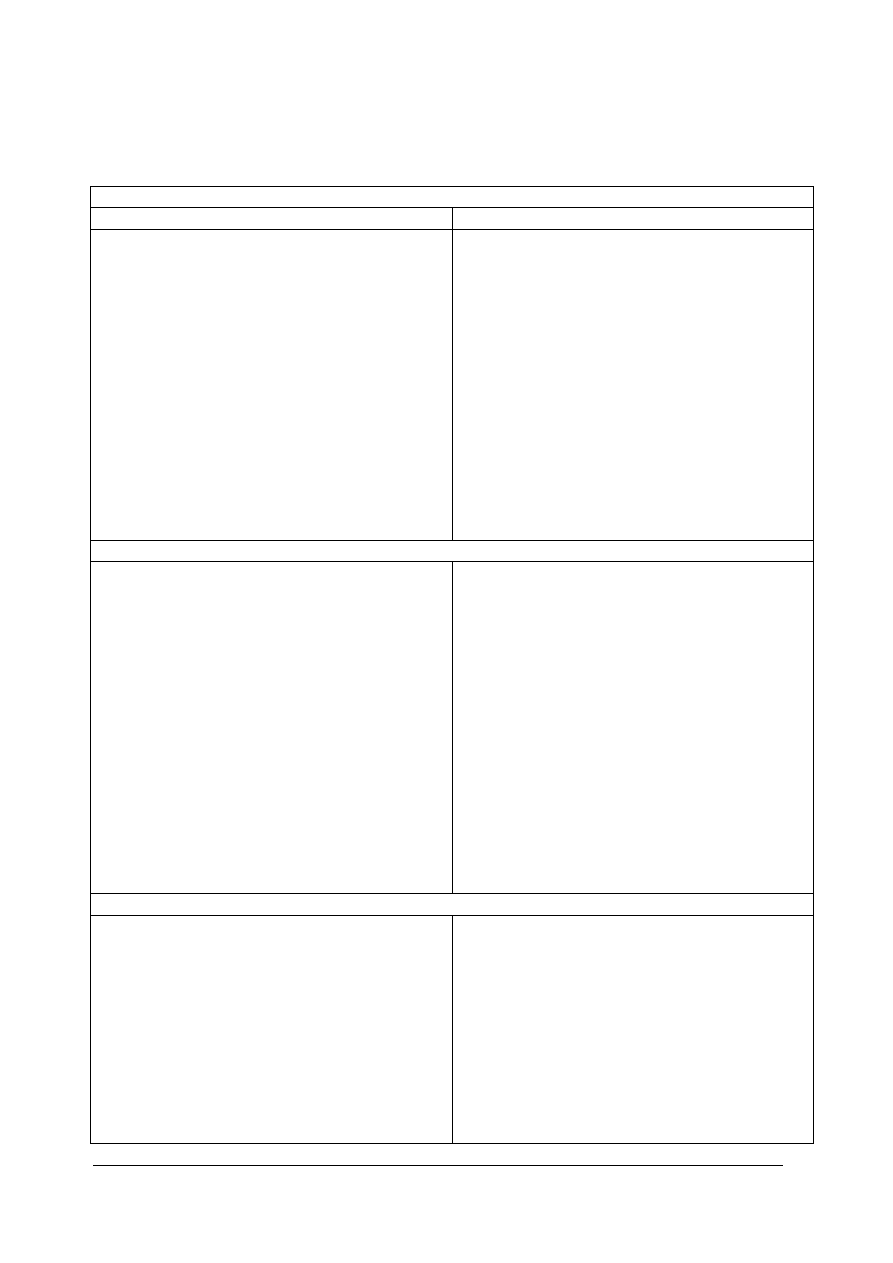
Ćwiczenie 2
Wyznacz transmitancję zastępczą układu, którego schemat strukturalny przedstawia rysunek
do ćwiczenia 2.
Rysunek do ćwiczenia 2. Schemat strukturalny
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie powinieneś:
1) zapoznać się z instrukcją wykonania ćwiczenia,
2) zorganizować stanowisko pracy do wykonania ćwiczenia,
3) przekształcić tak układ, by otrzymać połączenie szeregowe elementów,
4) wykonać obliczenia,
5) zaprezentować wykonane ćwiczenie,
6) dokonać oceny poprawności wykonanego ćwiczenia,
7) sporządzić sprawozdanie z przebiegu ćwiczenia, załączając schematy układu, otrzymane
wyniki, obliczenia i wnioski z badań.
Wyposażenie stanowiska pracy:
− instrukcja ćwiczenia,
− notatnik,
− literatura z rozdziału 6 wskazana przez nauczyciela.
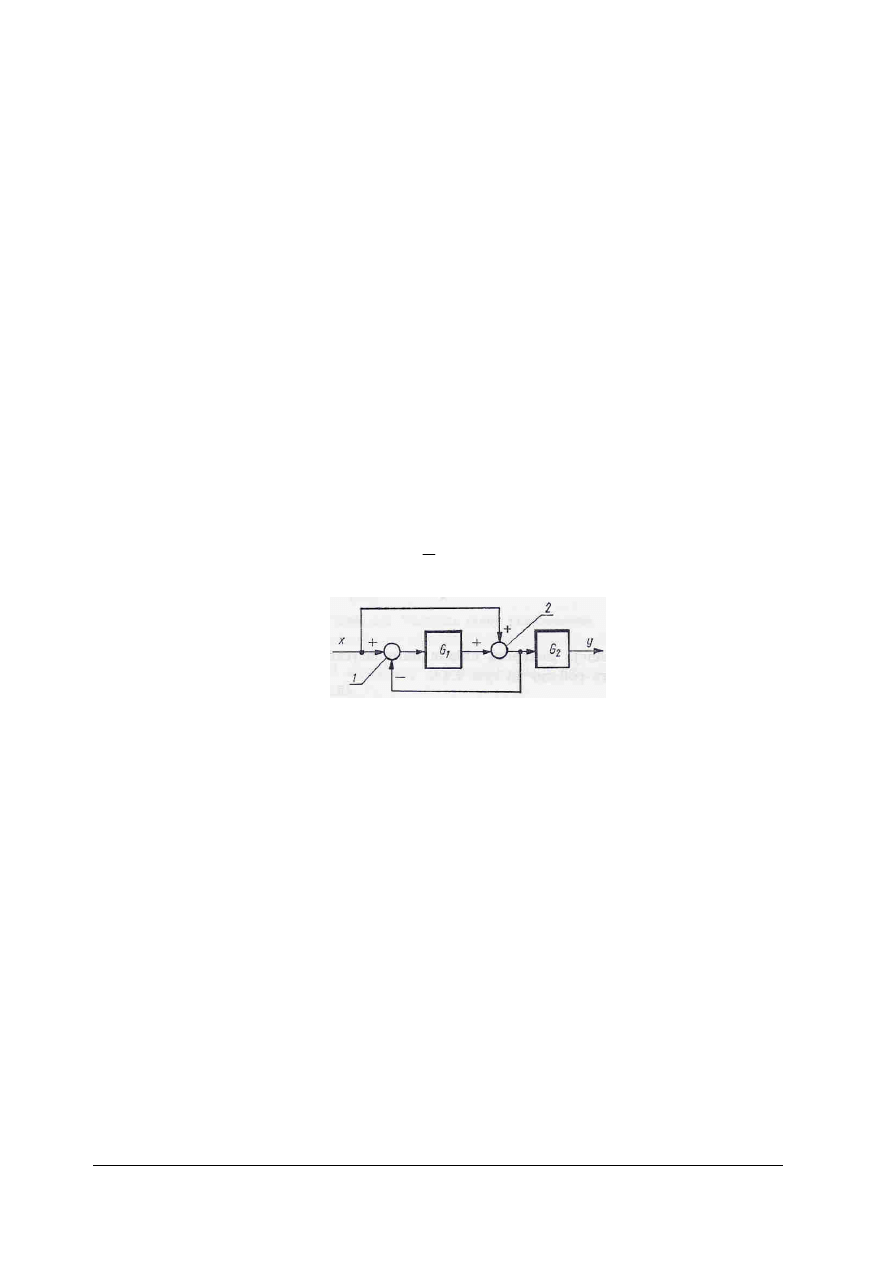
Ćwiczenie 3
Wyznacz transmitancję zastępczą układu, którego schemat strukturalny przedstawia rysunek
do ćwiczenia 3.
Rysunek do ćwiczenia 3. Schemat strukturalny
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie powinieneś:
1) zapoznać się z instrukcją wykonania ćwiczenia,
2) zorganizować stanowisko pracy do wykonania ćwiczenia,
3) przekształcić tak układ, by otrzymać połączenie szeregowe elementów,
4) wykonać obliczenia,
5) zaprezentować wykonane ćwiczenie,
6) dokonać oceny poprawności wykonanego ćwiczenia,

„
Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
19
7) sporządzić sprawozdanie z przebiegu ćwiczenia, załączając schematy układu, otrzymane
wyniki, obliczenia i wnioski z badań.
Wyposażenie stanowiska pracy:
− instrukcja ćwiczenia,
− notatnik,
− literatura z rozdziału 6 wskazana przez nauczyciela.
4.1.4. Sprawdzian postępów
Tak Nie
Czy potrafisz:
1) określić zasady łączenia
elementów?
2) obliczyć transmitancję zastępczą układu ze sprzężeniem zwrotnym?
3) dokonać przesunięcia węzłów sumacyjnych w układzie?
4) wymienić wartości napięć w obowiązujących standardach sygnałów?
5) wymienić wartości prądów w obowiązujących standardach sygnałów?
6) określić różnice między telemetrią a telesterowaniem?
7) podać wady i zalety przesyłu sygnałów cyfrowych i analogowych?
8) wymienić
zalety
telemechaniki?

„
Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
20
4.2. Zasady tworzenia dokumentacji połączeń elektrycznych
w układach automatyki
4.2.1. Materiał nauczania
Rysunek techniczny przyjęło się uważać za język techników. Rysunek taki, uzupełniony
opisem, zawiera zwartą i przejrzystą informację techniczną. Słownikiem (kodem) tego języka jest
zbiór pewnych umownych symboli graficznych.
Rysunek techniczny jest najczęściej najkrótszą, najprostszą i najbardziej przejrzystą formą
przekazania informacji o budowie urządzenia, o sposobie jego działania i o wielu innych sprawach
związanych z tym urządzeniem.
Opis słowny, który miałby zastąpić rysunek techniczny, mógłby rozrosnąć się do nadmiernej
objętości, a wówczas nie osiągałby często takiej prostoty informacji, jak wynika z rysunku.
Rysunek techniczny ma jeszcze i tę zaletę, że jeśli jest wykonany według zasad uzgodnionych
międzynarodowo, to może być rozumiany bez konieczności tłumaczenia na inne języki.
Rysunek techniczny dzieli się na:
− schematy,
− diagramy.
Rysunek techniczny może obrazować:
− układ połączeń,
− zasadę działania,
− współdziałanie elementów,
− sposób instalowania,
− sposób użytkowania,
− sposób utrzymania w czasie pracy,
− sposób naprawy, itp.
Do rysunku technicznego elektrycznego, zwanego często niesłusznie tylko schematem,
zalicza się plany, diagramy oraz związane z nimi wykazy i tablice, występujące samodzielnie lub
na rysunkach, oraz wykresy.
Schemat jest to rysunek przedstawiający urządzenia, instalacje, które podane są za pomocą
umownych symboli graficznych, a połączenia między nimi – liniami. Wśród schematów można
wyróżnić:
− schematy strukturalne,
− schematy funkcjonalne,
− schematy wykonawcze (montażowe).
W praktyce spotyka się rysunek, który uwzględnia niektóre elementy schematów
strukturalnych i funkcjonalnych, zwany schematem blokowym.
Schemat blokowy ma za zadanie ułatwić zrozumienie zasad działania urządzenia lub układu
bez uwidaczniania wszystkich jego elementów i rzeczywistych połączeń. Elementy schematów
blokowych są przedstawiane przede wszystkim za pomocą prostokątów, rzadziej innych figur
geometrycznych, okręgów z naniesionymi wewnątrz symbolami i nazwami.
Schemat wykonawczy przedstawia wzajemne położenie elementów składowych urządzenia
lub układu, połączenia między nimi, a także szczegóły konstrukcyjno-wykonawcze.
Dla projektanta i użytkownika układów automatyki zasadnicze znaczenie mają:
− schemat technologiczny,
− schemat automatyzacji,
− schemat mnemotechniczny (synoptyczny).
„
Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
21
Schemat technologiczny ilustruje przebieg procesu technologicznego za pomocą symboli
graficznych i znaków przedstawiających kolejne operacje i procesy jednostkowe lub aparaty
i urządzenia oraz funkcjonalne ich powiązania.
Schemat automatyzacji jest to schemat technologiczny z symbolami i oznaczeniami układów
automatyki.
Schemat mnemotechniczny jest uproszczonym schematem automatyzacji. Nanosi się go
zazwyczaj na szafach, tablicach i pulpitach sterowniczych.
Diagram jest rysunkiem, który przedstawia zależności między elementami lub przebiegi
sygnałów.
W tabelach poniżej przedstawiono niektóre oznaczenia i symbole stosowane w regulacji
i automatyce przemysłowej.
Symbole i oznaczenia zamieszczone są m.in. w normie PN-89/M-42007 oraz publikacjach
IEC (International Electrotechnical Commission - afiliowana przy ISO) – Publication 117
(wydawane są w odrębnych częściach).
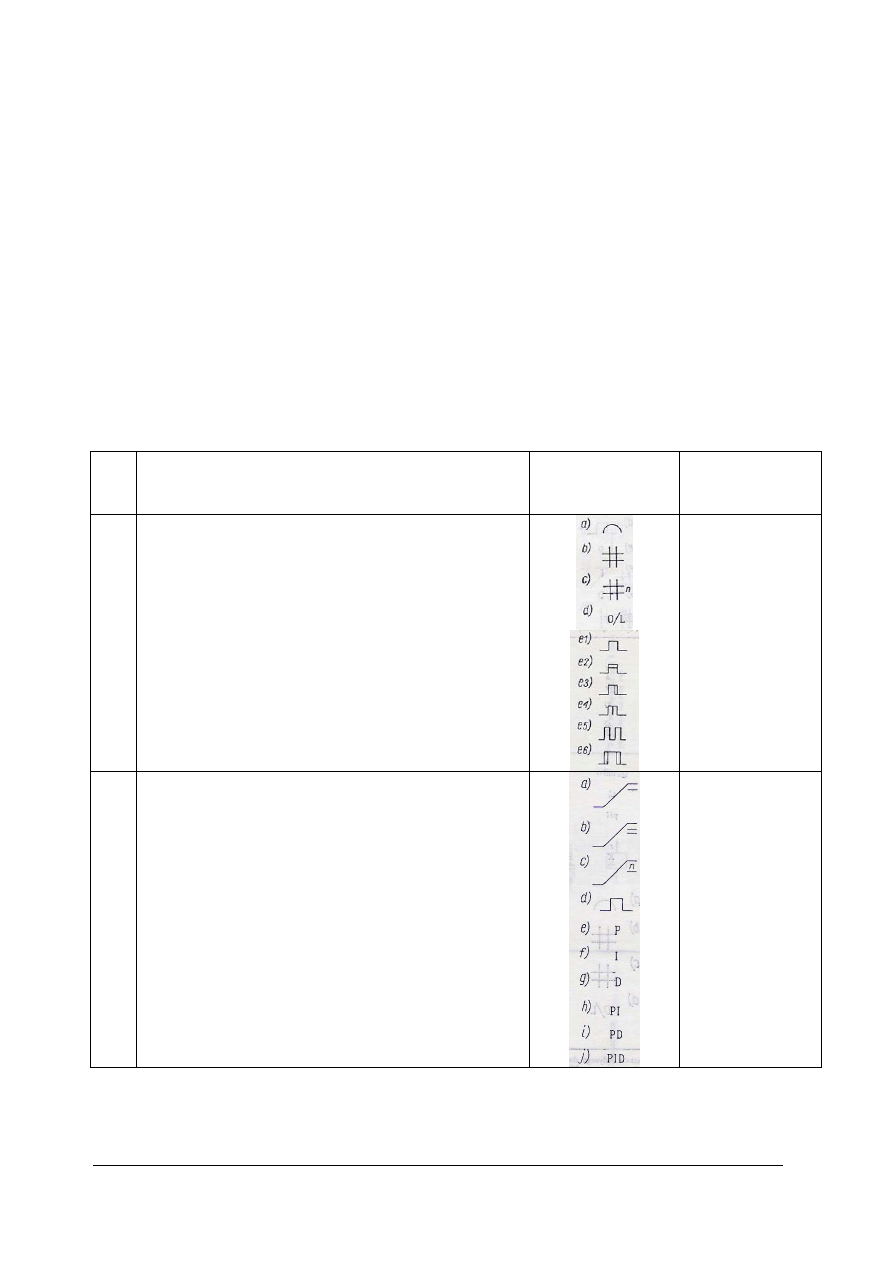
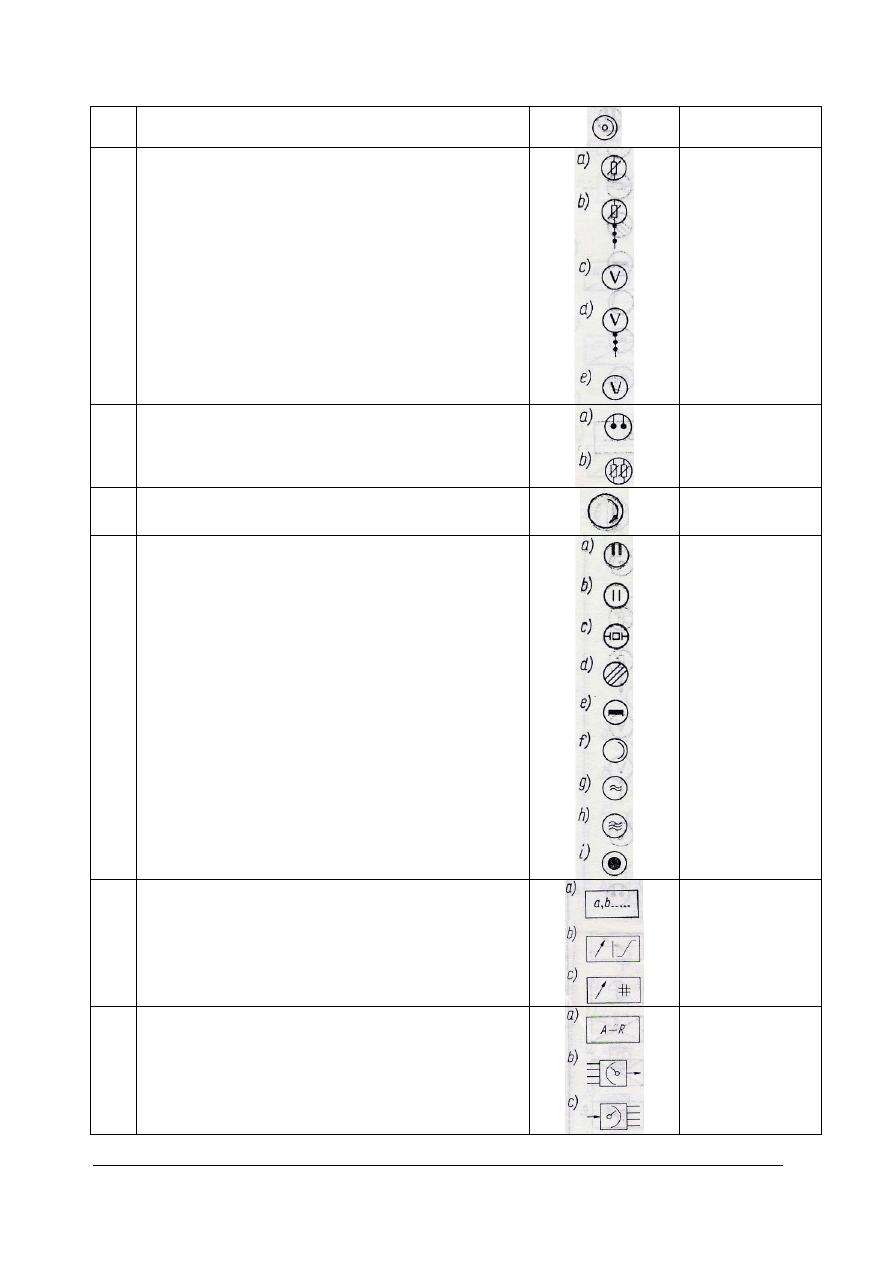
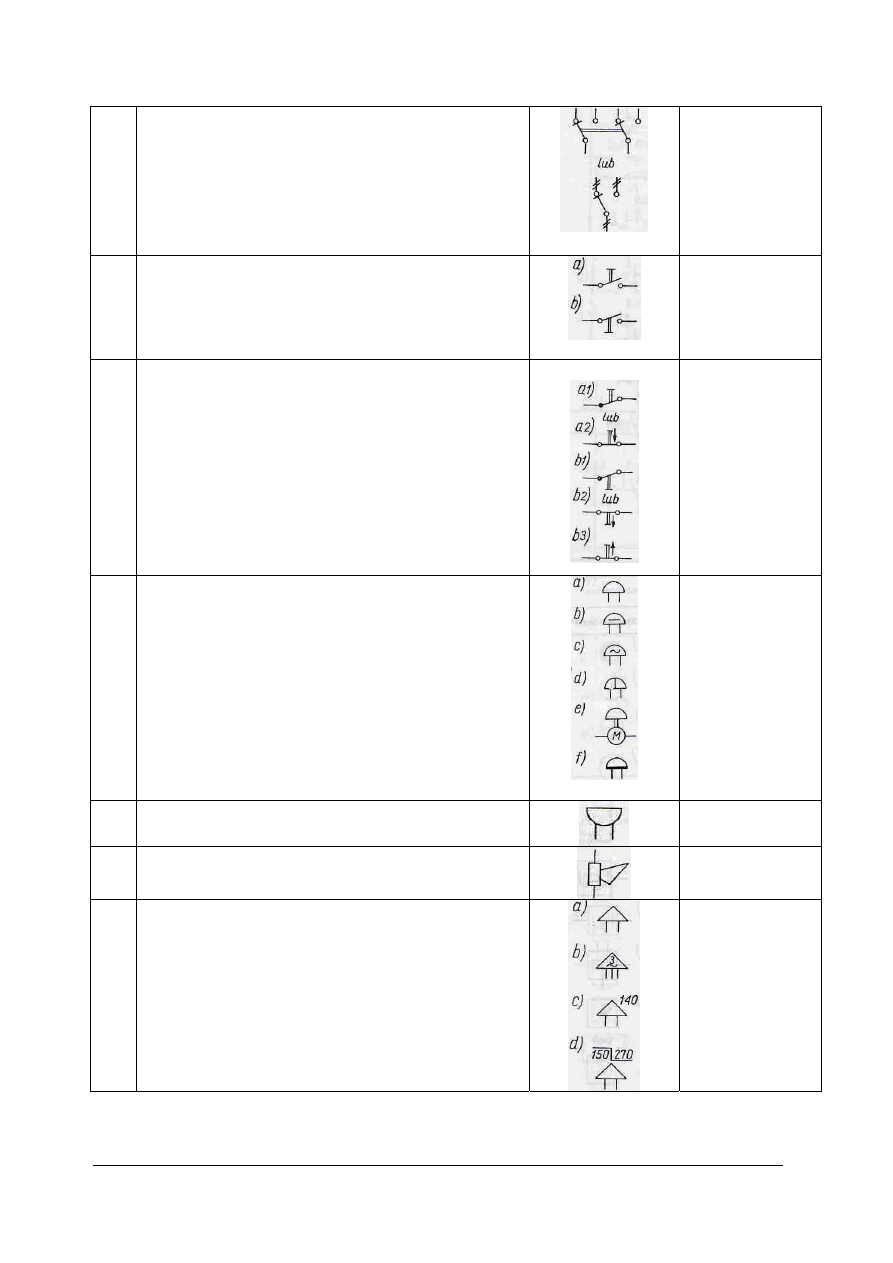
Tabela 7. Oznaczenia i symbole stosowane w regulacji i automatyce przemysłowej.[na podstawie norm i publikacji
Michel K., Sapiński T.:„Zasady rysunku elektrycznego w elektronice i automatyce” WNT Warszawa,1971]
Lp Nazwa
Oznaczenie
literowe
i symbol graficzny
Uwagi
1. Rodzaje
sygnałów:
a) sygnał analogowy,
b) sygnał cyfrowy,
c) sygnał cyfrowy kodowany o podstawie n,
d) sygnał cyfrowy o dwóch poziomach,
e) sygnał impulsowy:
e1) symbol ogólny,
e2) modulowany amplitudowo,
e3) modulowany w szerokości,
e4) modulowany częstotliwościowo,
e5) kodowany,
e6) modulowany fazowo.
2. Rodzaje regulacji, regulacja:
a) dwustawna,
b) trójstawna,
c) n-stawna,
d) impulsowa,
e) proporcjonalna,
f) całkująca,
g) różniczkująca,
h) proporcjonalno-całkująca,
i) proporcjonalno-różniczkująca,
j) proporcjonalno-całkująco-różniczkująca
„
Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
22
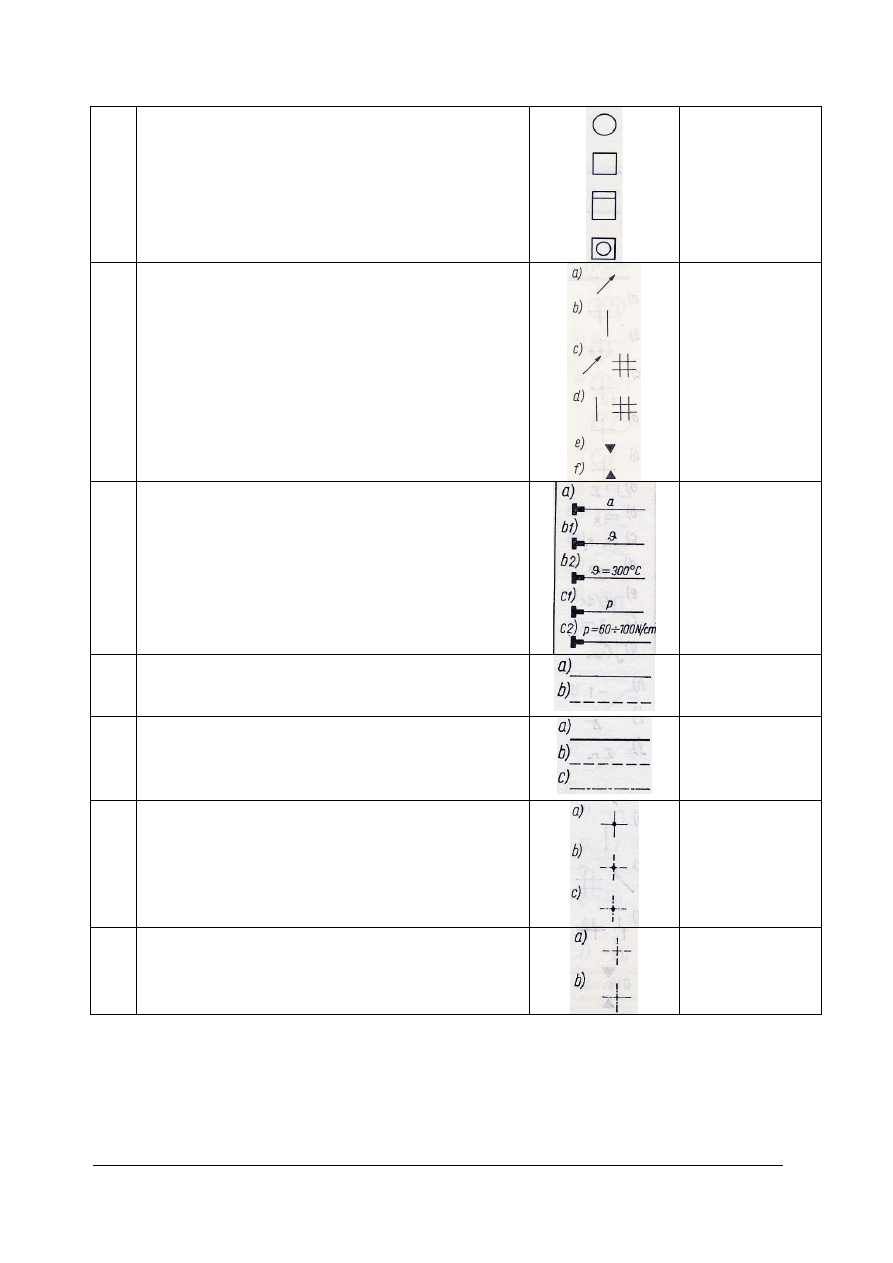
3. Rodzaje
przyrządów pomiarowych:
a) przyrząd pomiarowy wskazujący,
b) przyrząd pomiarowy piszący (rejestrujący),
c) przyrząd pomiarowy liczący (licznik),
d) przyrząd pomiarowy wskazujący i piszący.
4. Cechy funkcjonalne przyrządów pomiarowych:
a) wskazanie,
b) zapis (rejestracja),
c) wskazanie cyfrowe,
d) zapis cyfrowy,
e) sygnalizacja odchylenia od największej
wartości,
f) sygnalizacja odchylenia od najmniejszej
wartości.
5. Miejsce
pomiaru:
a) symbol ogólny
b1) temperatury,
b2) temperatury
ϑ
= 300
0
C (przykładowo),
c1) ciśnienia,
c2) ciśnienie p = 60 ÷ 100 N/cm
2
6. Linie
łączeniowe na schematach:
a) blokowych,
b) technologicznych.
7. Przewód:
a) elektryczny,
b) pneumatyczny,
c) hydrauliczny.
8. Połączenie przewodów:
a) elektrycznych,
b) pneumatycznych,
c) hydraulicznych.
9. Skrzyżowanie nie łączących się przewodów:
a) pneumatycznych,
b) hydraulicznych.
„
Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
23
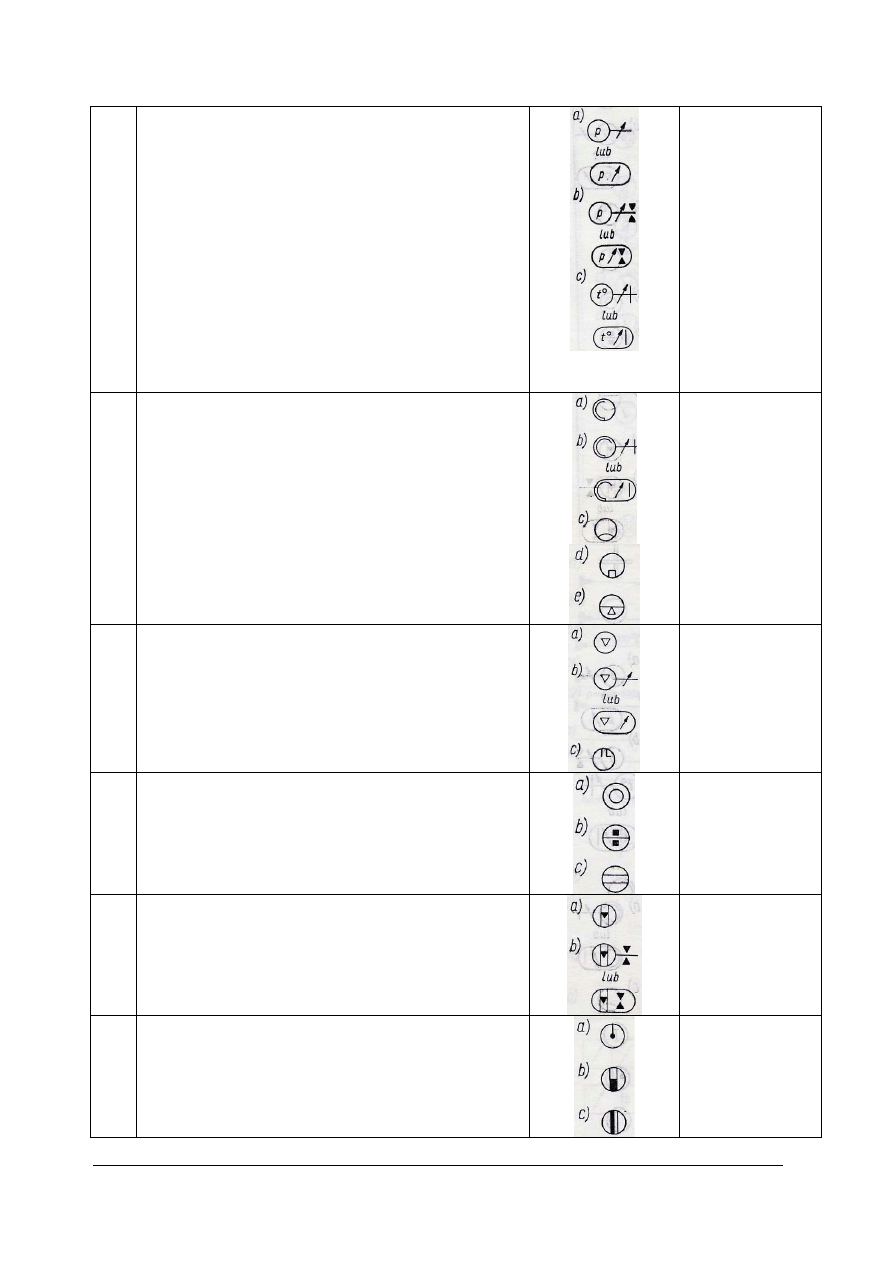
10. Przyrząd pomiarowy pierwotny:
a) do pomiaru ciśnienia, wskazujący,
b) do pomiaru ciśnienia, wskazujący,
z sygnalizacją odchylenia od najmniejszej
i od największej wartości,
c) do pomiaru temperatury, wskazujący
i rejestrujący.
Oznaczeniem
literowym
temperatury jest
ϑ
.
11. Manometr:
a) sprężynowy,
b) sprężynowy wskazujący i rejestrujący,
c) pływakowy,
d) dzwonowy,
e) typu wagi pierścieniowej.
12. Miernik
poziomu:
a) pływakowy,
b) pływakowy wskazujący,
c) piezometryczny.
13. Przepływomierz:
a) objętościowy rotacyjny (cieczy i gazu),
b) zwężkowy,
c) elektromagnetyczny.
14. Rotametr:
a) schemat ogólny,
b) o sygnalizowanym odchyleniu od wartości
najmniejszej i od największej.
15. Termometr:
a) cieczowy szklany,
b) manometryczny,
c) bimetalowy lub dylatometryczny.
„
Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
24
16. Pirometr
17. Czujnik:
a) rezystancyjny (oporowy),
b) rezystancyjny wielopunktowy,
c) termoelektryczny,
d) termoelektryczny wielopunktowy,
e) termoelektryczny różnicowy.
18. Psychrometr:
a) o termometrach płynowych szklanych,
b) elektryczny.
19. Tachometr
20. Urządzenie pomiarowe:
a) konduktometryczne,
b) pojemnościowe,
c) piezoelektryczne,
d) tensometryczne,
e) indukcyjne,
f) fotometryczne,
g) ultradźwiękowe,
h) ultrakrótkofalowe,
i) radioaktywne.
21. Przyrząd pomiarowy wtórny:
a) symbol ogólny,
b) wskazująco-rejestrująco-całkujacy,
c) wskazujący cyfrowy.
W prostokąt
należy wpisać
zamiast liter a, b,
cechy
funkcjonalne
22. Przełącznik:
a) „regulacja automatyczna – sterowanie ręczne”,
b) zbierający (wielopunktowy),
c) rozdzielający.
„
Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
25
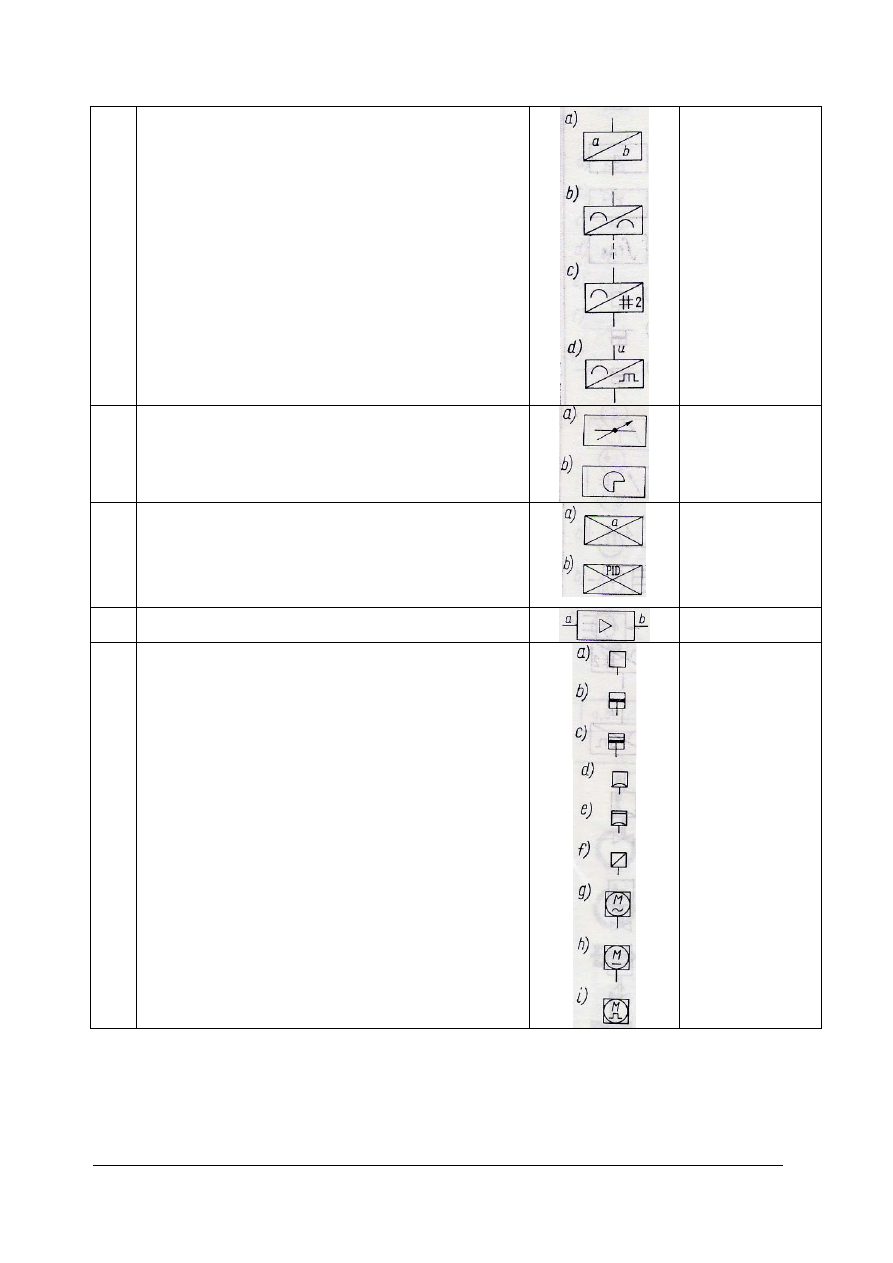
23. Przetwornik:
a) symbol ogólny,
b) sygnału wejściowego elektrycznego
analogowego na sygnał wyjściowy
pneumatyczny analogowy,
c) sygnału wejściowego elektrycznego
analogowego na sygnał wyjściowy elektryczny
cyfrowy binarny,
d) sygnału wejściowego elektrycznego
napięciowego analogowego na sygnał
wyjściowy elektryczny o modulacji impulsowej
częstotliwościowej.
24. Zadajnik:
a) ręczny,
b) programowy.
25. Regulator:
a) symbol ogólny,
b) typu PID.
26. Wzmacniacz – symbol ogólny.
27. Siłownik:
a) symbol ogólny,
b) tłokowy,
c) tłokowy z ustawnikiem,
d) membranowy,
e) membranowy z ustawnikiem,
f) elektromagnesowy,
g) elektryczny z silnikiem prądu przemiennego,
h) elektryczny z silnikiem prądu stałego,
i) elektryczny z silnikiem krokowym.
„
Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
26
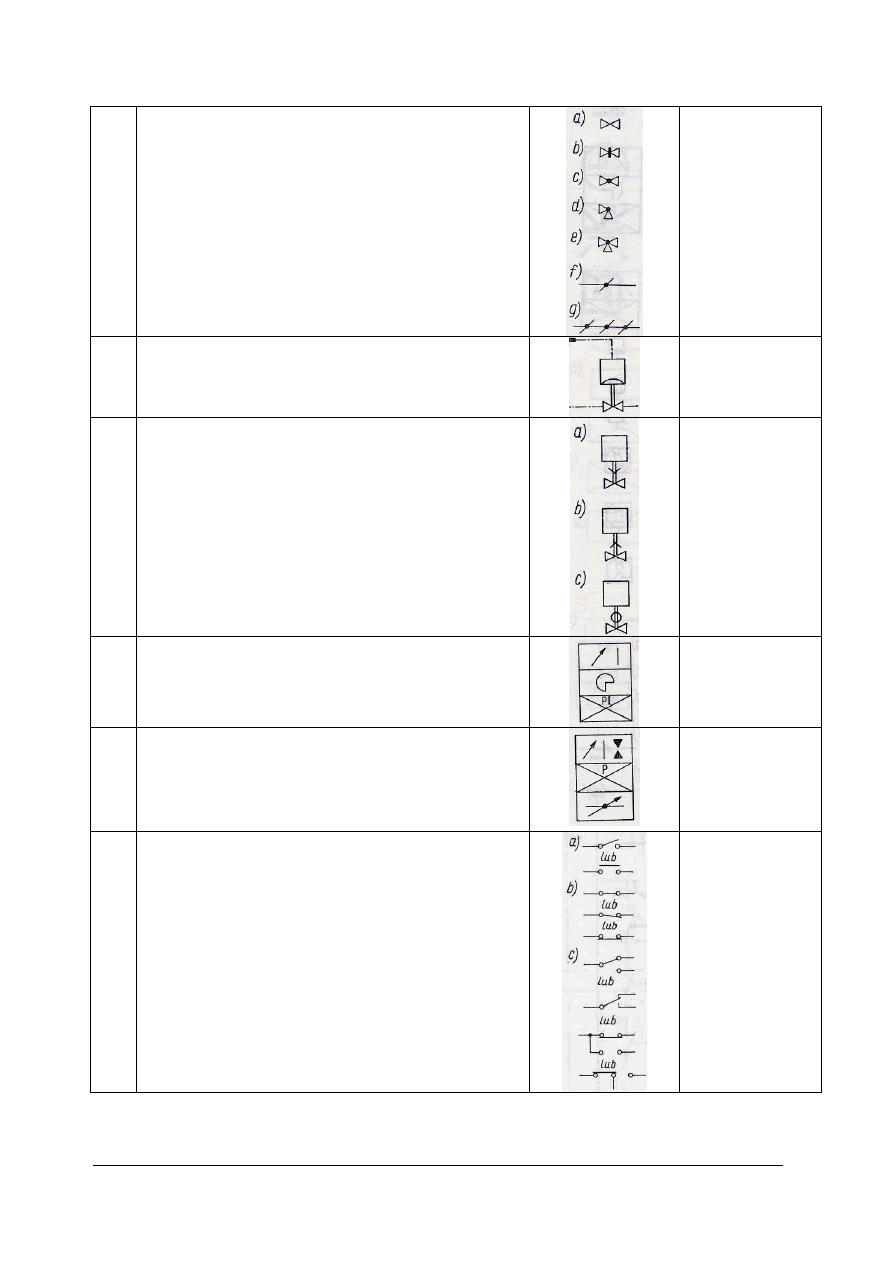
28. Organ
nastawny:
a) zawór prosty,
b) zasuwa,
c) kurek,
d) zawór kątowy,
e) zawór trójdrogowy,
f) przepustnica jednoskrzydłowa,
g) przepustnica wieloskrzydłowa.
29. Regulator
bezpośredniego działania – ciśnienia.
30. Zespół siłownika z zaworem prostym:
a) siłownik przy zaniku energii pomocniczej
zamyka zawór,
b) siłownik przy zaniku energii pomocniczej
otwiera zawór,
c) element zamykający zawór przy zaniku energii
pomocniczej siłownika zatrzymuje się w
określonym położeniu.
31. Zestaw konstrukcyjny złożony z przyrządu
pomiarowego wtórnego wskazującego
i zapisującego, z zadajnika programowego
i regulatora PI.
32. Zestaw konstrukcyjny złożony z przyrządu
pomiarowego wtórnego wskazującego, zapisującego
i sygnalizującego odchylenie od największej
i najmniejszej wartości,
z regulatora P i zadajnika ręcznego.
33. Zestyk
łącznika:
a) zwierny,
b) rozwierny,
c) przełączany,
d) przełączany bezprzerwowy,
e) przełączany trójpołożeniowy o środkowej
pozycji spoczynkowej.
„
Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
27
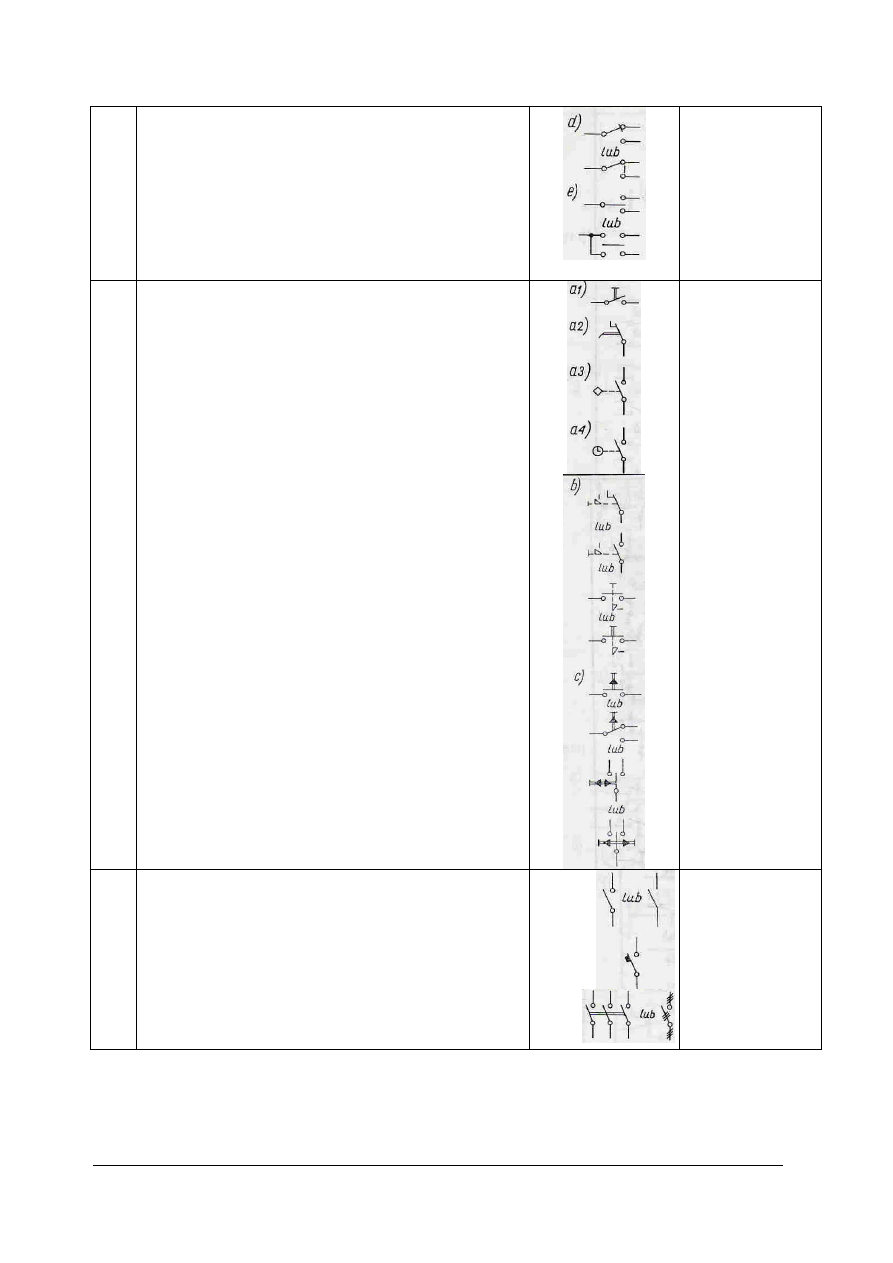
34. Zestyk z napędem:
a) z oznaczeniami jego rodzaju,
a1) napęd ręczny,
a2) napęd nożny,
a3) uruchomienie kluczem,
a4) uruchomienie mechanizmu zegarowego,
b) z oznaczeniem ryglowania (zapadki),
c) z oznaczeniem samoczynnego powrotu.
35 Łącznik:
a) symbol ogólny, łącznik jednobiegunowy,
b) samoczynny,
c) trójbiegunowy.
a)
b)
c)
„
Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
28
36 Przełącznik dwubiegunowy bezprzerwowy.
37 Łącznik o jednym zestyku zwiernym
o napędzie ręcznym:
a) wciskany,
b) wyciągany.
38
.
Łącznik o jednym zestyku rozwiernym
o napędzie ręcznym:
a) wciskany,
b) wyciągany.
39.
.
Dzwonek:
a) symbol ogólny,
b) dzwonek prądu stałego,
c) dzwonek prądu przemiennego,
d) dzwonek jednouderzeniowy, gong,
e) dzwonek o napędzie silnikowym,
f) dzwonek ze wskaźnikiem optycznym.
40. Brzęczyk
41. Buczek
42. Syrena:
a) symbol ogólny,
b) syrena np. na prąd trójfazowy,
c) syrena o tonie 140 Hz,
syrena o tonie wahliwym od 150 do 270 Hz
„
Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
29
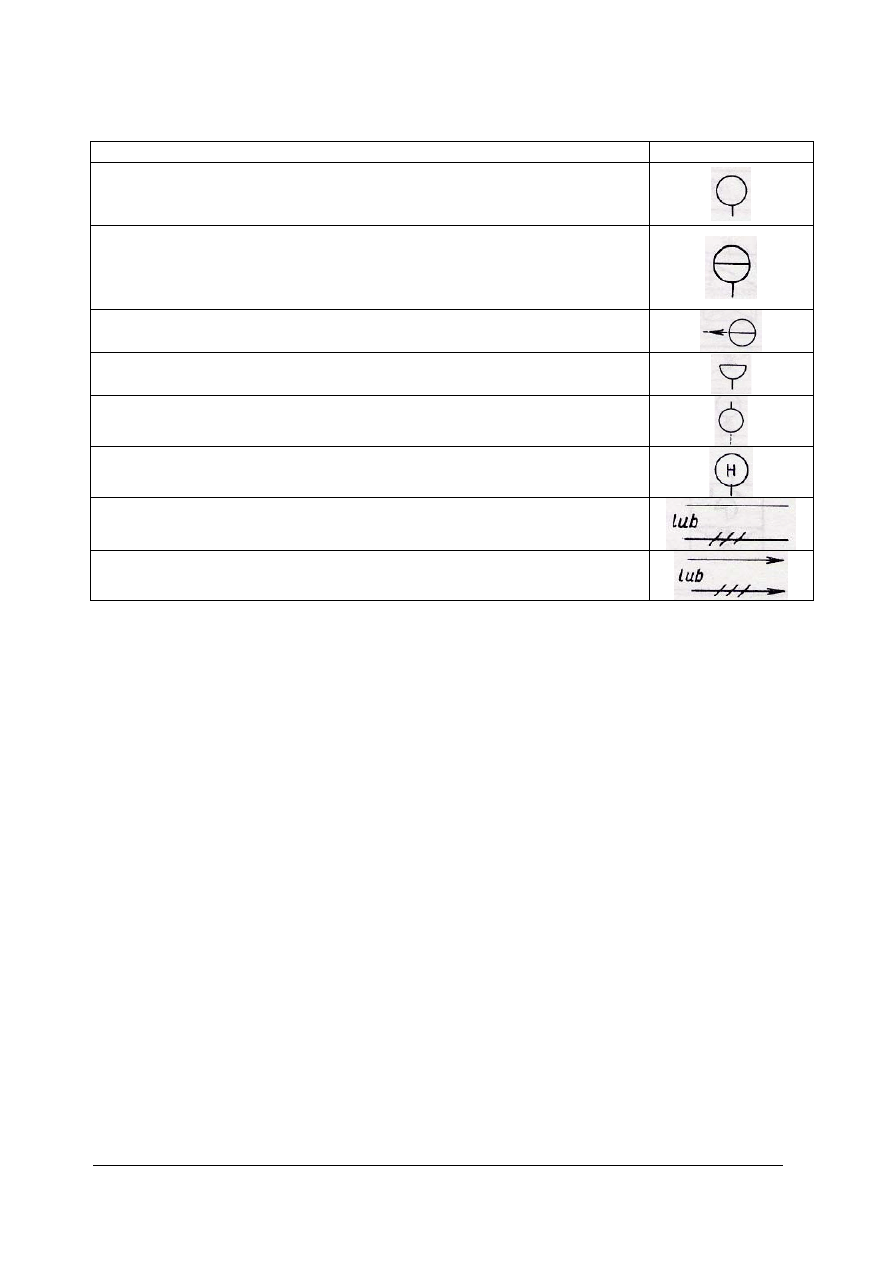
Tabela 8. Oznaczenia i symbole na schematach technologicznych (wg PN-89/M-42007) [ 17, s. 26]
Nazwa (i określenie) Symbol
graficzny
Punkt PA
1)
miejscowy – punkt PA odwzorowujący zespół przyrządów
pomiarowych, który określa informacje o przebiegu procesu
przemysłowego w pobliżu miejsca odbioru sygnału.
Punkt PA zdalny – punkt PA (nie spełniający warunków punktu PA
miejscowego) odwzorowujący zespół przyrządów pomiarowych wtórnych,
pozwala na odbiór informacji o przebiegu procesu w jednym miejscu
(tablicy, pulpicie sterowniczym).
Punkt PA współpracujący – punkt PA połączony z obiektem za pomocą
punktów PA miejscowych lub zdalnych.
Punkt okresowy odbioru sygnału – miejsce przystosowane do pobierania
wielkości mierzonych lub (i) sterowanych.
Element wykonawczy.
Element wykonawczy z ręcznym bezpośrednim oddziaływaniem na
element nastawczy
Linia sygnałowa.
Linia sygnałowa z podaniem kierunku przekazywania sygnału.
1)
Układ PA – zespół przyrządów pomiarowych lub (i) elementów automatyki wzajemnie
powiązanych między sobą i obiektem w celu uzyskania informacji o przebiegu procesu
przemysłowego i oddziaływaniach na niego zgodnie z pożądanym algorytmem działania.
Punkt PA – odwzorowanie układu PA na schematach technologicznych za pomocą symbolu
graficznego i oznaczenia literowo-cyfrowego, przedstawiającego wykonane przez układ funkcje
i jego umiejscowienie w procesie (instalacji).
Punkty PA są opisywane zgodnie ze schematem przedstawionym na rys. 9.
„
Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
30
Rys. 9. Sposób opisywania punktów PA [17, s. 27]
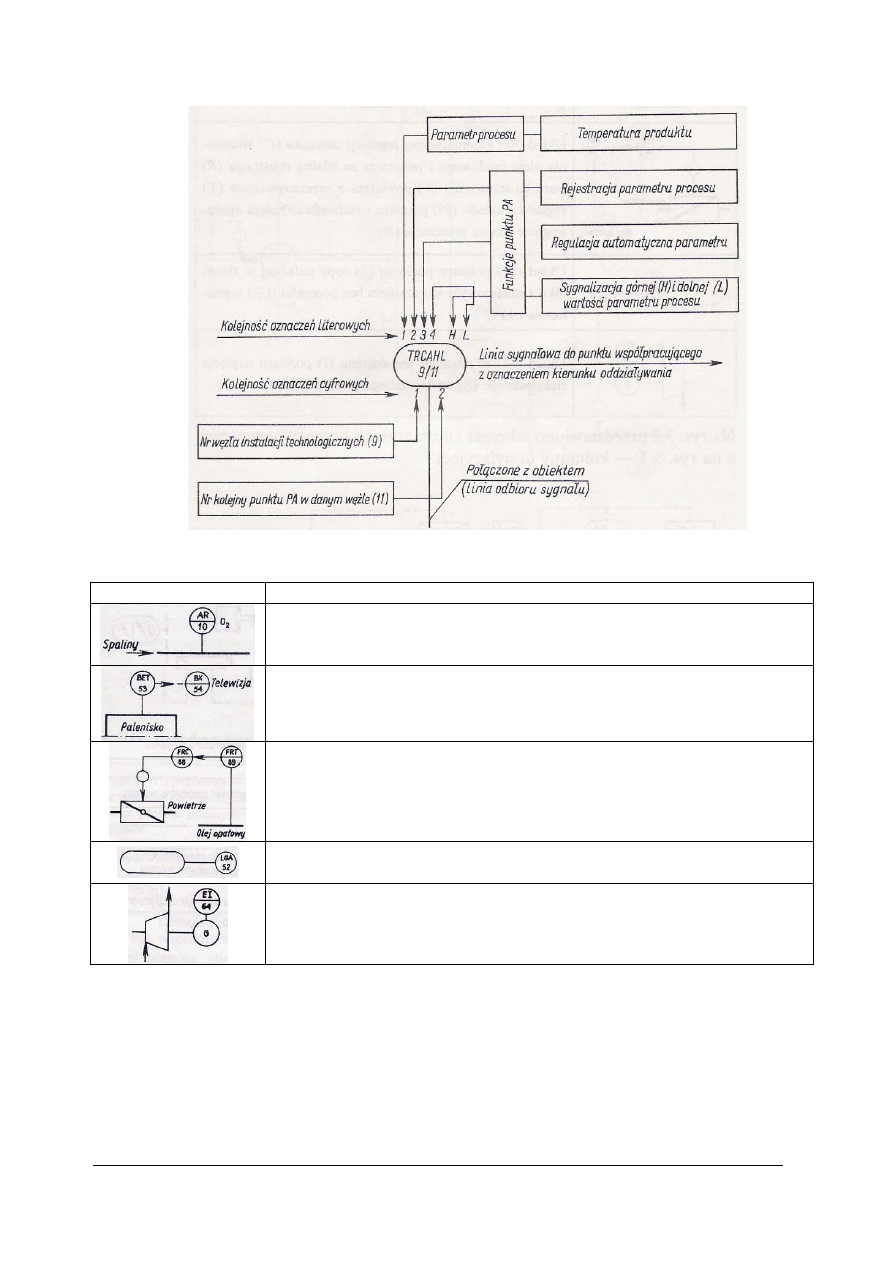
Tabela 9. Przykłady przedstawiania punktów PA [17, s. 27]
Schemat Objaśnienie
Układ (10) pomiaru ze zdalną rejestracja (R) zawartości tlenu (O
2
)
w spalinach.
Układ pomiaru bez wskazania (E) wielkości płomienia (B) w palenisku
z przekazywaniem (T) wielkości płomienia do współpracującego
zdalnego układu (54) obserwacji telewizyjnej (X) płomienia.
Układ (88) automatycznej regulacji stosunku © strumienia opałowego
i powietrza ze zdalną rejestracją (R) wartości strumienia (F) powietrza
z przekazywaniem (T) sygnału z układu (89) pomiaru strumienia (F) oleju
opałowego ze zdalną rejestracją (R).
Układ (52) pomiaru poziomu (L) ropy naftowej w zbiorniku
z miejscowym wskazaniem bez podziałki (G) i sygnalizacją (A).
Układ (64) ze zdalnym wskazaniem (I) pomiaru napięcia elektrycznego
(E) wytwarzanego przez prądnicę.
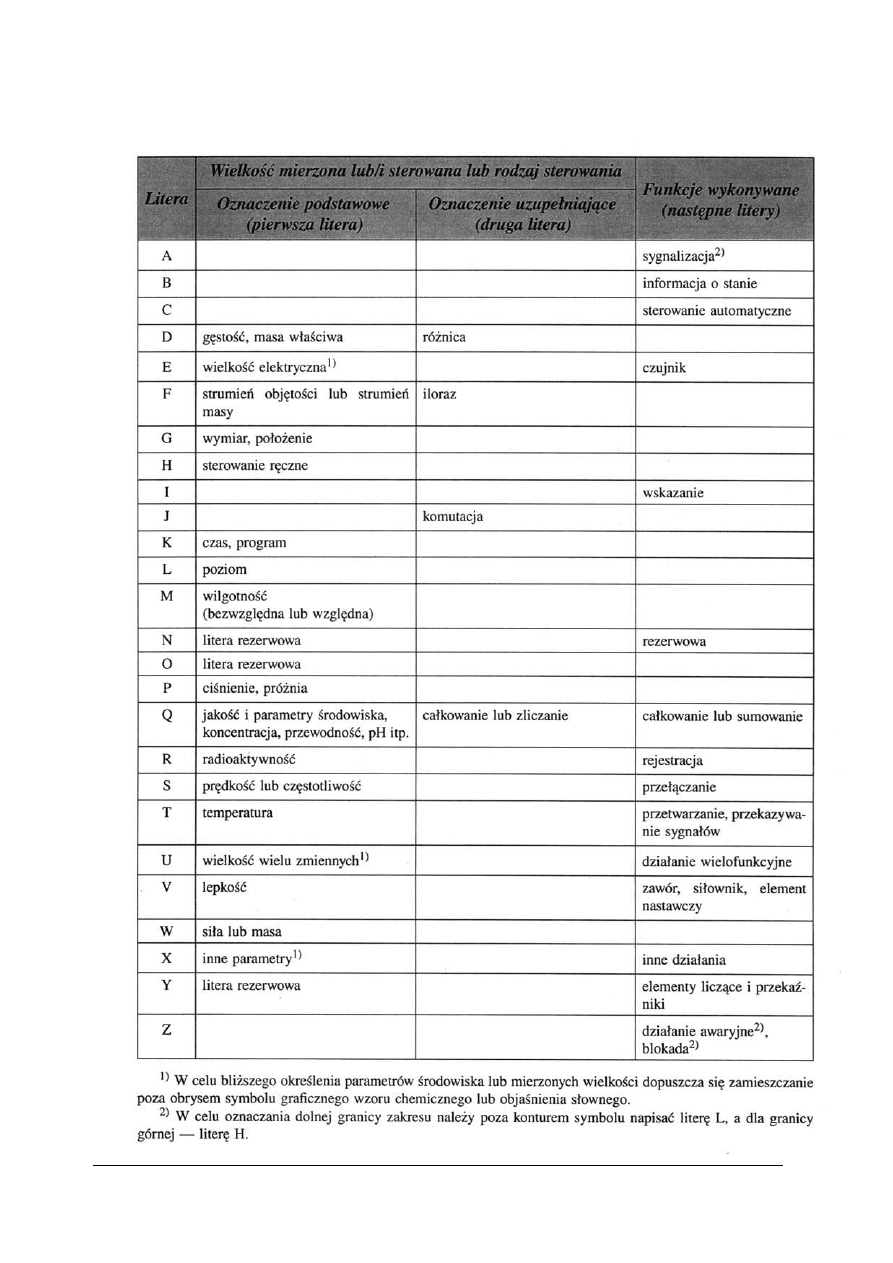
Przy rysowaniu schematów automatyzacji są stosowane, oprócz symboli graficznych, również
oznaczenia literowe (tabela 10) zgodne z PN –89/M-42007.
„
Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
31
Tabela 10. Oznaczenia literowe na schematach automatyzacji [12, s.78]
„
Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
32
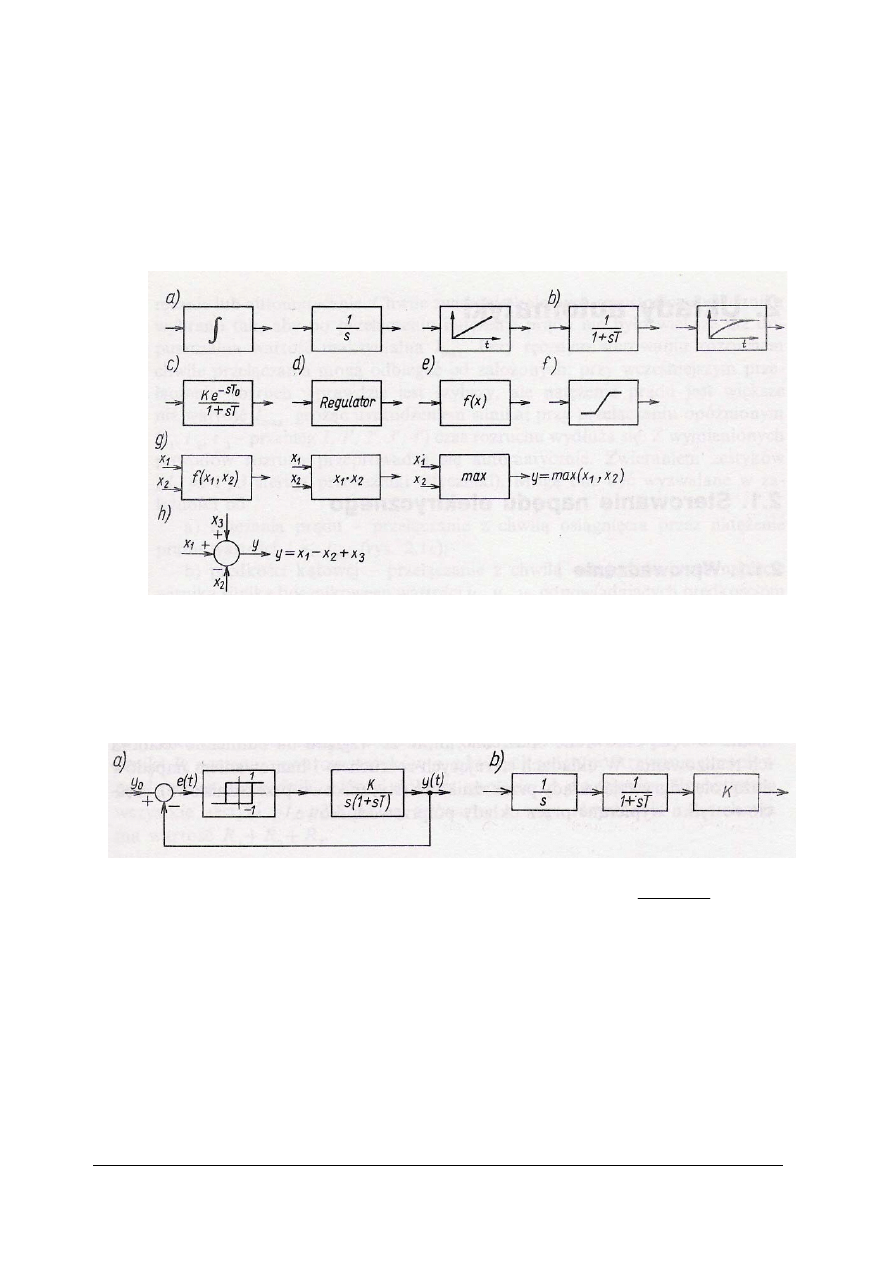
Podczas analizy układów sterowania na podstawie modeli matematycznych stosuje się
schematy blokowe (rys.10). Przy sporządzaniu tych schematów dopuszczalna jest dość dużą
dowolność, np. właściwości dynamiczne urządzenia wyraża się zarówno w postaci operatorowej,
jak i równania różniczkowego (matematyka wyższa) lub nawet odpowiedzi skokowej.
Opis właściwości matematycznych umieszcza się wewnątrz prostokątów (bloków), bez
względu na to czy jest to transmitancja operatorowa, czy charakterystyka statyczna i czy wyrażona
jest graficznie, czy analitycznie. Wyjątkiem bywa element porównujący bądź sumujący sygnały,
zwany węzłem sumacyjnym.
Rys. 10. Oznaczenia przykładowych elementów schematów urządzeń automatyki: [16, s. 37]
a) całkujący, b) inercyjny, c) inercyjny z opóźnieniem (typowy model procesów przemysłowych),
d) regulator, układy statyczne o zależności przedstawionej analitycznie (e) i graficznie (f), g) układy
statyczne dwóch zmiennych, h) węzeł sumujący (porównujący).
Przykładowy schemat układu zawierającego elementy statyczne i dynamiczne przedstawiono
na rys. 11.
Rys. 11. Przykładowy układ regulacji [16, s. 37]
a) schemat, b) równoważny schemat bloku dynamicznego o transmitancji
T)
s
(1
s
K
+
4.2.2. Pytania sprawdzające
Odpowiadając na pytania, sprawdzisz, czy jesteś przygotowany do wykonania ćwiczeń.
1. Jakie zalety wynikają z zastosowania znormalizowanych oznaczeń i symboli graficznych?
2. Jakie wyróżniamy rodzaje schematów?
3. Jakie zadania stawia się schematom blokowym?
4. Jakie informacje zawarte są na schematach montażowych?
5. Jakie informacje można odczytać z schematów technologicznych?
„
Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
33
4.2.3. Ćwiczenia
Ćwiczenie 1
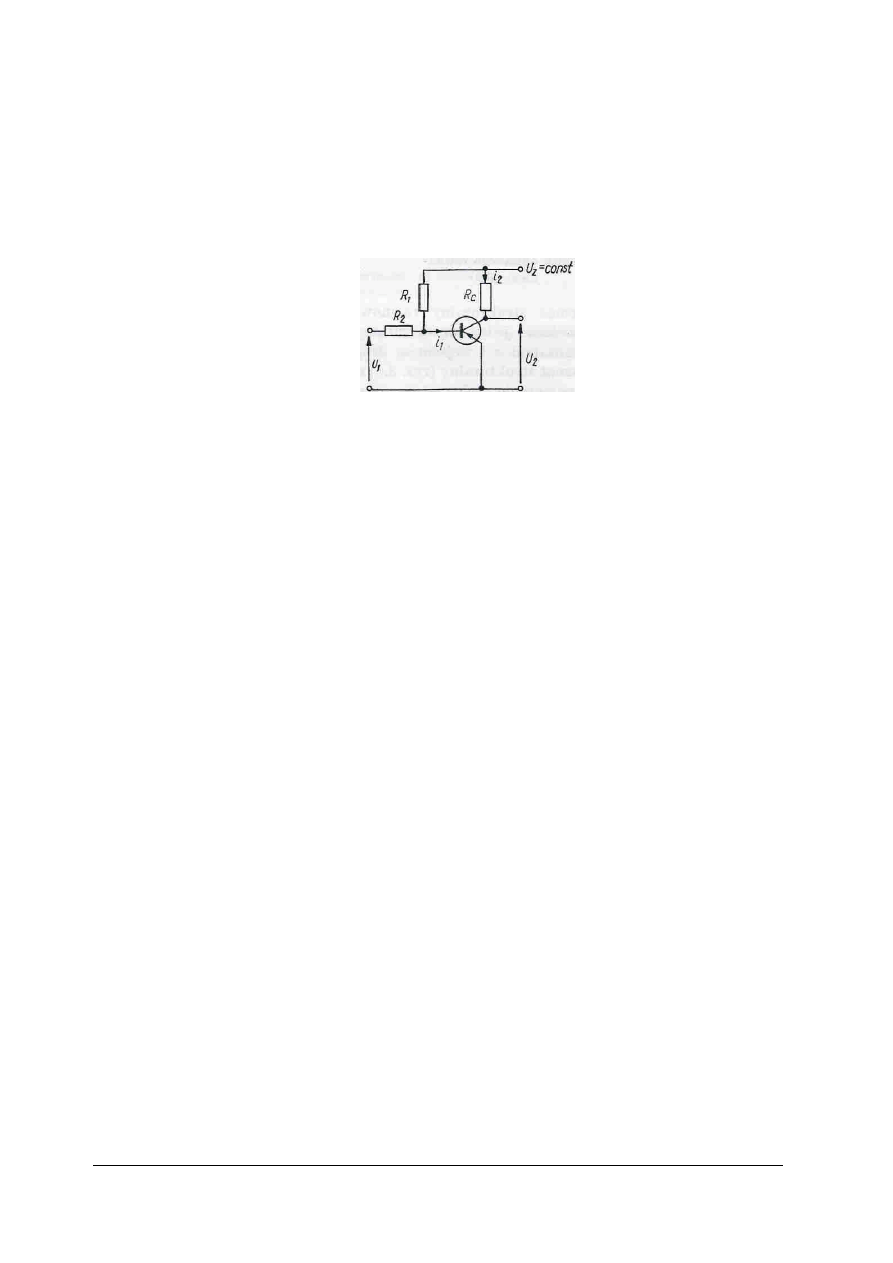
Dany jest wzmacniacz tranzystorowy (rysunek do ćwiczenia 1). Wyznaczyć schemat
strukturalny i transmitancję wzmacniacza dla wybranego tranzystora (decyduje nauczyciel).
Rezystory w układzie mają następujące wartości: R
c
= 2 kΩ, R
1
= 100 kΩ, R
2
= 1 kΩ.
Rysunek do ćwiczenia 1. Schemat ideowy wzmacniacza tranzystorowego.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie powinieneś:
1) zapoznać się z instrukcją wykonania ćwiczenia,
2) zorganizować stanowisko pracy do wykonania ćwiczenia,
3) przekształcić tak układ, by otrzymać schemat strukturalny wzmacniacza (wykorzystać
schemat zastępczy tranzystora dla parametrów „h”),
4) wykonać obliczenia,
5) wpisać wartości do bloków schematu strukturalnego wzmacniacza,
6) zaprezentować wykonane ćwiczenie,
7) dokonać oceny poprawności wykonanego ćwiczenia,
8) sporządzić sprawozdanie z przebiegu ćwiczenia, załączając schematy układu, otrzymane
wyniki, obliczenia i wnioski z badań.
Wyposażenie stanowiska pracy:
− instrukcja ćwiczenia,
− notatnik,
− literatura z rozdziału 6 wskazana przez nauczyciela.
Ćwiczenie 2
Dla wzmacniacza całkującego zrealizowanego z zastosowaniem wzmacniacza operacyjnego,
wyznacz transmitancję układu.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie powinieneś:
1) zapoznać się z instrukcją wykonania ćwiczenia,
2) zorganizować stanowisko pracy do wykonania ćwiczenia,
3) zaprojektować układ,
5) przekształcić tak układ, by otrzymać schemat blokowy,
6) wykonać obliczenia,
7) wpisać wartości do bloków schematu strukturalnego wzmacniacza,
8) zaprezentować wykonane ćwiczenie,
9) dokonać oceny poprawności wykonanego ćwiczenia,
„
Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
34
10) sporządzić sprawozdanie z przebiegu ćwiczenia, załączając schematy układu, otrzymane
wyniki, obliczenia i wnioski z badań.
Wyposażenie stanowiska pracy:
− instrukcja ćwiczenia,
− notatnik,
− literatura z rozdziału 6 wskazana przez nauczyciela.
Ćwiczenie 3
Na rysunku do ćwiczenia rozpoznaj oznaczenia i elementy automatyki. Sprządź wykaz
elementów.
Rysunek do ćwiczenia 3. Układ automatycznej regulacji [17, s. 60]
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie powinieneś:
1) zapoznać się z instrukcją wykonania ćwiczenia,
2) zorganizować stanowisko pracy do wykonania ćwiczenia,
3) wypisać elementy,
4) wpisać obok symbolu określenie i przeznaczenie elementu,
5) zaprezentować wykonane ćwiczenie,
6) dokonać oceny poprawności wykonanego ćwiczenia,
7) sporządzić sprawozdanie z przebiegu ćwiczenia, załączając schemat układu, otrzymane
wyniki, i wnioski z badań.
Wyposażenie stanowiska pracy:
− instrukcja ćwiczenia,
− notatnik,
− normy,
− literatura z rozdziału 6 wskazana przez nauczyciela.
Ćwiczenie 4
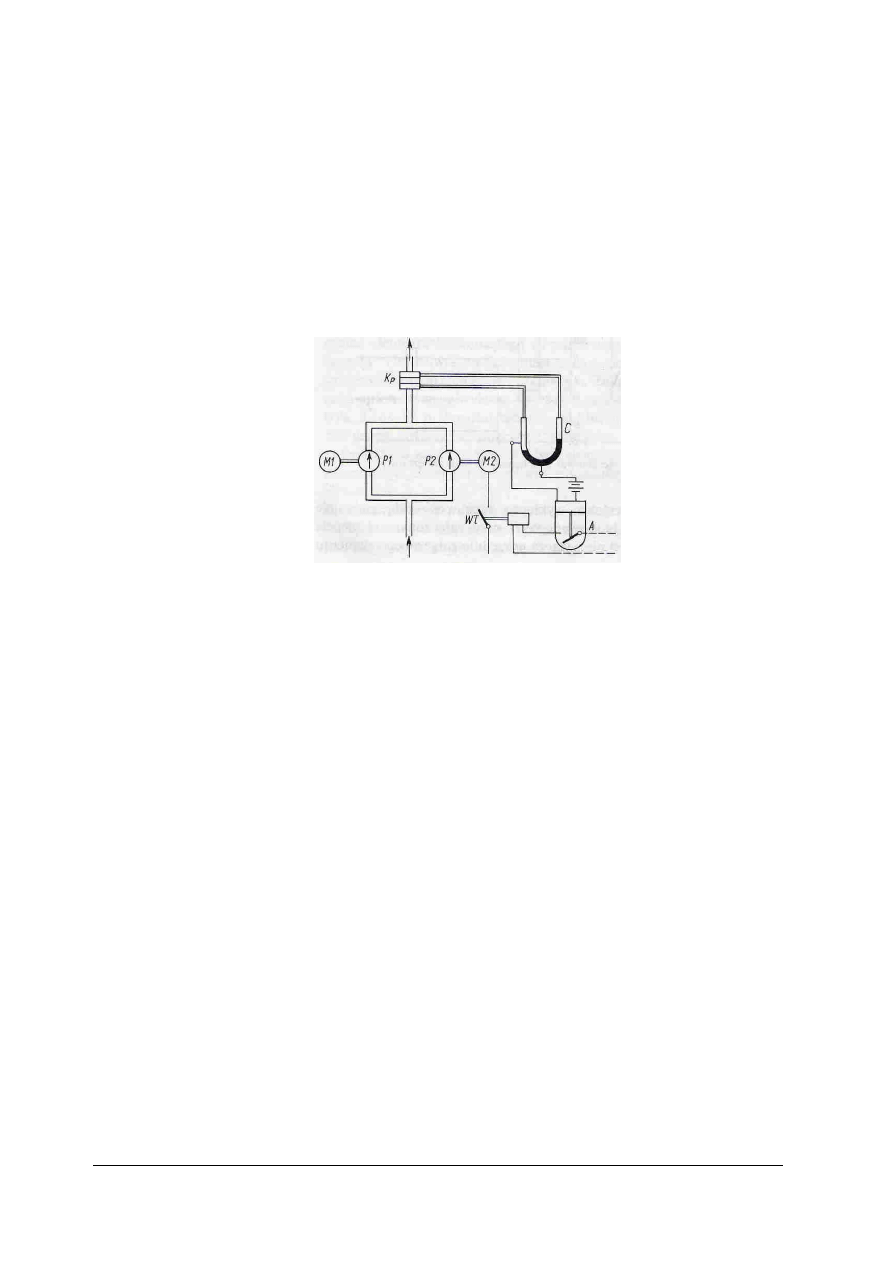
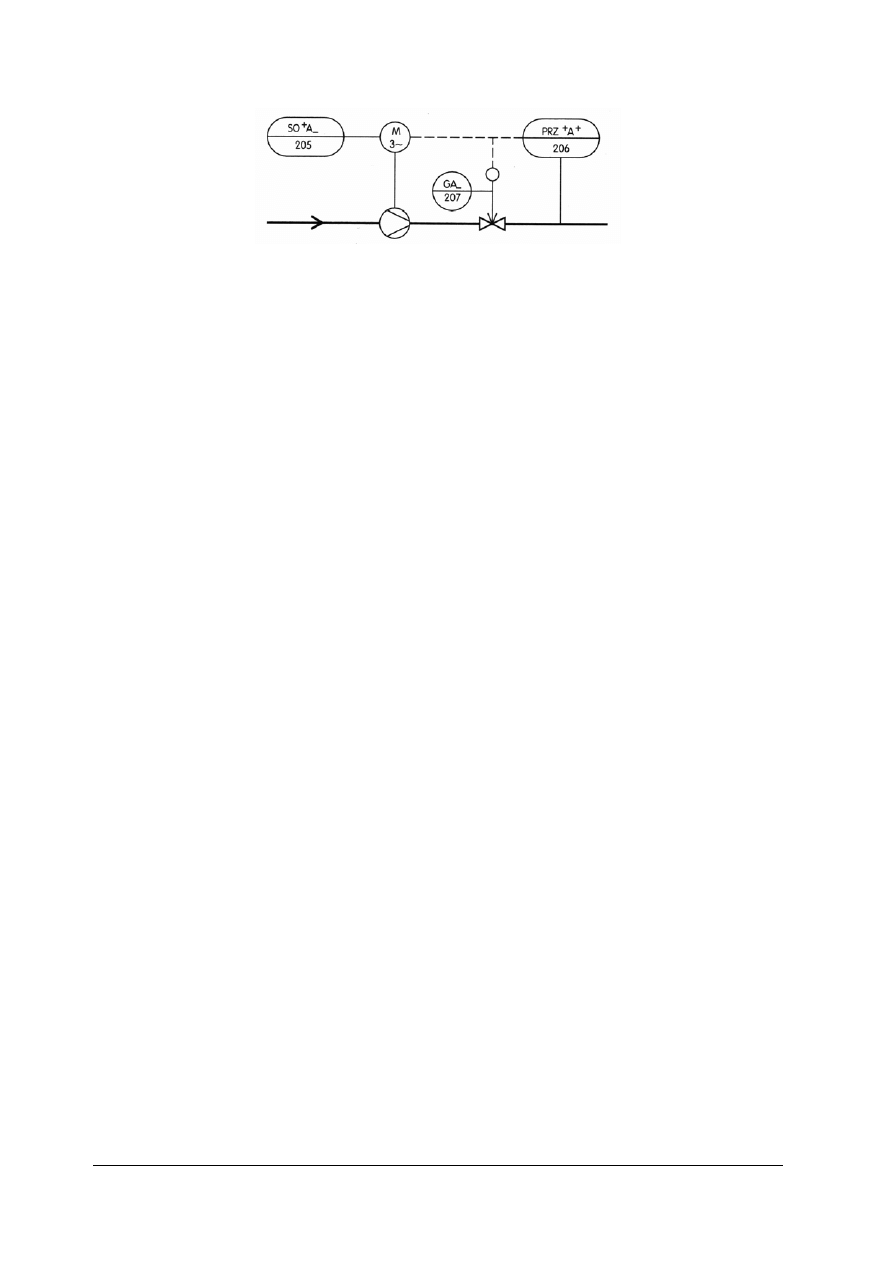
Na rysunku przedstawiony jest schemat przepływowy instalacji sprężonego powietrza.
Przeanalizuj schemat automatyzacji, i rozpoznaj zastosowane środki kontroli ciśnienia sprężonego
powietrza oraz podaj, który stan zaworu układ regulacji traktuje jako zakłócenie. W jaki sposób
możesz rozpoznać, czy sprężarka pracuje czy jest wyłączona?
„
Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
35
Rysunek do ćwiczenia 4.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie powinieneś:
1) zapoznać się z instrukcją wykonania ćwiczenia,
2) zorganizować stanowisko pracy do wykonania ćwiczenia,
3) przeanalizować schemat,
4) przeanalizować symbole urządzeń i PA,
5) wypisać środki kontroli ciśnienia,
6) określić miejsce zainstalowania i obsługi urządzeń do kontroli ciśnienia,
7) określić urządzenie kontrolujące stan zaworu,
8) określić stan zaworu traktowany przez układ regulacji jako zakłócenie,
9) określić miejsce zainstalowania i obsługi urządzeń kontrolujących stan zaworu,
10) określić urządzenie kontrolujące pracę sprężarki,
11) wypisać środki kontroli pracy sprężarki,
12) określić miejsce zainstalowania i obsługi urządzeń kontrolujących pracę sprężarki,
13) zaprezentować wykonane ćwiczenie,
14) dokonać oceny poprawności wykonanego ćwiczenia.
Wyposażenie stanowiska pracy:
− instrukcja ćwiczenia,
− notatnik,
− literatura z rozdziału 6 wskazana przez nauczyciela.
4.2.4. Sprawdzian postępów
Tak Nie
Czy potrafisz:
1) rozpoznać na schemacie elementy wykonawcze?
2) rozpoznać na schemacie regulatory?
3) narysować schemat blokowy układu elektronicznego znając schemat ideowy?
4) narysować schemat montażowy układu regulacji?
5) narysować symbole elementów sygnalizacyjnych?
6) rozpoznać na schemacie przetworniki i opisać ich przeznaczenie?

„
Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
36
4.3. Układy sterowania automatycznego
4.3.1. Materiał nauczania
Sterowanie polega na oddziaływaniu na określony proces fizyczny w celu uzyskania
pożądanego przebiegu tego procesu.
Obiektem sterowania nazywa się proces fizyczny podlegający określonemu rodzajowi
sterowania. Urządzenie wytwarzające sygnały sterujące przebiegiem procesu nazywa się
urządzeniem sterującym.
Zespół współdziałających ze sobą urządzeń, realizujących określony proces fizyczny oraz
sterowanie jego przebiegiem, nazywa się układem sterowania.
Rozróżnia się układy sterowania:
− otwartego,
− zamkniętego.
Zamknięte układy sterowania ze sprzężeniem zwrotnym ciągłym są nazywane układami
regulacji ciągłej.
Jeśli urządzenie realizuje sterowanie procesem samoczynnie, to takie sterowanie określa się
mianem sterowania automatycznego. Sterowanie realizowane na znaczne odległości nazywa się
sterowaniem zdalnym.
Wśród wielu odmian wyróżnić można sterowanie:
− sekwencyjne,
− czasowe,
− sekwencyjno-czasowe,
− nadążne,
− programowe.
Cechą charakterystyczną sterowania sekwencyjnego jest zapewnienie właściwej kolejności
wykonywania operacji technologicznych.
Sterowanie czasowe polega na tym, że odpowiednie oddziaływanie urządzenia sterującego
odbywa się według z góry ustalonego programu czasowego. W najprostszym przypadku chodzi
o utrzymanie określonego odstępu czasu między dwoma zdarzeniami.
Sterowanie sekwencyjno-czasowe stanowi połączenie dwóch poprzednich odmian
sterowania.
W układach sterowania nadążnego wartość wielkości wiodącej nie jest z góry znana, lecz
zmienia się przypadkowo.
W układach sterowania programowego wielkość wiodąca zmienia się w sposób z góry
znany, zgodnie z określonym programem. Program ten może być zmieniany przez obsługę,
zwykle przez nastawienie członu programującego.
Spośród napędów najszersze zastosowanie znalazł napęd elektryczny. Spowodowane to jest
licznymi zaletami takiego napędu (łatwe zasilanie, łatwe i ekonomiczne transformowanie
i przetwarzanie prądu przemiennego, duża sprawność silników elektrycznych, łatwe sterowanie).
Napędy elektryczne są łatwe do automatyzacji.
Sterowanie napędu elektrycznego może być realizowane m.in. w funkcji:
− czasu,
− prądu,
− napięcia,
− prędkości kątowej.
Układy sterowania mogą być realizowane w technice analogowej lub cyfrowej. Bardzo często
stosuje się rozwiązania mieszane – połączenie techniki cyfrowej z analogową.

„
Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
37
W automatyce napędu elektrycznego nadal dużą rolę odgrywają układy stycznikowo-
przekaźnikowe. Odtworzenie działania skomplikowanego układu, na podstawie schematu
elektrycznego, jest stosunkowo trudne i niekiedy koniecznym uzupełnieniem schematu staje się
odpowiedni opis lub diagramy czasowe. Ze względu na często powtarzające się przy opisie zwroty
typu: „przekaźnik zadziała”, „przekaźnik zwolni”, „przekaźnik zadziała i zamknie sobie własnym
stykiem dodatkowy obwód zasilania cewki”, itd. stosuje się następujące umowne symbole zapisu:
+ oznacza zadziałanie lub załączenie określonego elementu,
− oznacza zwolnienie lub wyłączenie określonego elementu,
++ oznacza zadziałanie elementu i samoczynne podtrzymanie,
-- oznacza zwolnienie elementu z dodatkowym przerwaniem swego obwodu własnym stykiem
pomocniczym,
± oznacza krótkotrwałe zadziałanie określonego elementu,
±± oznacza wielokrotnie powtarzające się zadziałanie i zwolnienie określonego elementu.
Symbole te umieszcza się po oznaczeniach literowych określonych elementów. Na przykład
jeśli oznaczyć:
Z – przycisk niestabilny,
SL – stycznik,
M – silnik,
to zapis Z ±, SL ++, M + należy odczytać następująco:
po zadziałaniu przycisku Z następuje zadziałanie stycznika SL, który podtrzymuje się własnym
stykiem, co powoduje zadziałanie silnika M.
Sterowanie napędów odnosi się przede wszystkim do operacji rozruchu, hamowania i zmiany
kierunku wirowania silników elektrycznych, a także napędów pneumatycznych i hydraulicznych.
W układach sterowania rozruchem i hamowaniem napędów istotną rolę odgrywają układy
przekaźnikowo-stycznikowe (coraz częściej wypierane są przez układy półprzewodnikowe).
Jednak warto zapoznać się z takim sposobem sterowania napędami silników, gdyż
programowanie układów np. PLC z wykorzystaniem metody drabinkowej, bardzo przypomina
układy sterowania napędami (wydruk programu i schemat napędu).
Włączenie zatrzymanego silnika elektrycznego do sieci zasilającej powoduje przepływ
dużego prądu rozruchowego przekraczającego kilkunastokrotnie wartość prądu znamionowego.
Tak gwałtowne zmiany mogłyby uszkodzić aparaturę pomiarową jak i sam silnik. Dlatego
ogranicza się wartość prądu rozruchowego, np. dołączając dodatkowe rezystory w obwód wirnika
lub stosując przełącznik gwiazda-trójkąt, czy też obniżenie napięcia za pomocą autotransformatora
(który sposób zostanie zastosowany zależy od rodzaju silnika).
W silnikach prądu stałego dołącza się rezystory, które w miarę wzrostu prędkości kątowej
silnika odłącza się. Rozruch może być realizowany w funkcji:
− prądu,
− prędkości kątowej,
− czasu.
„
Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
38
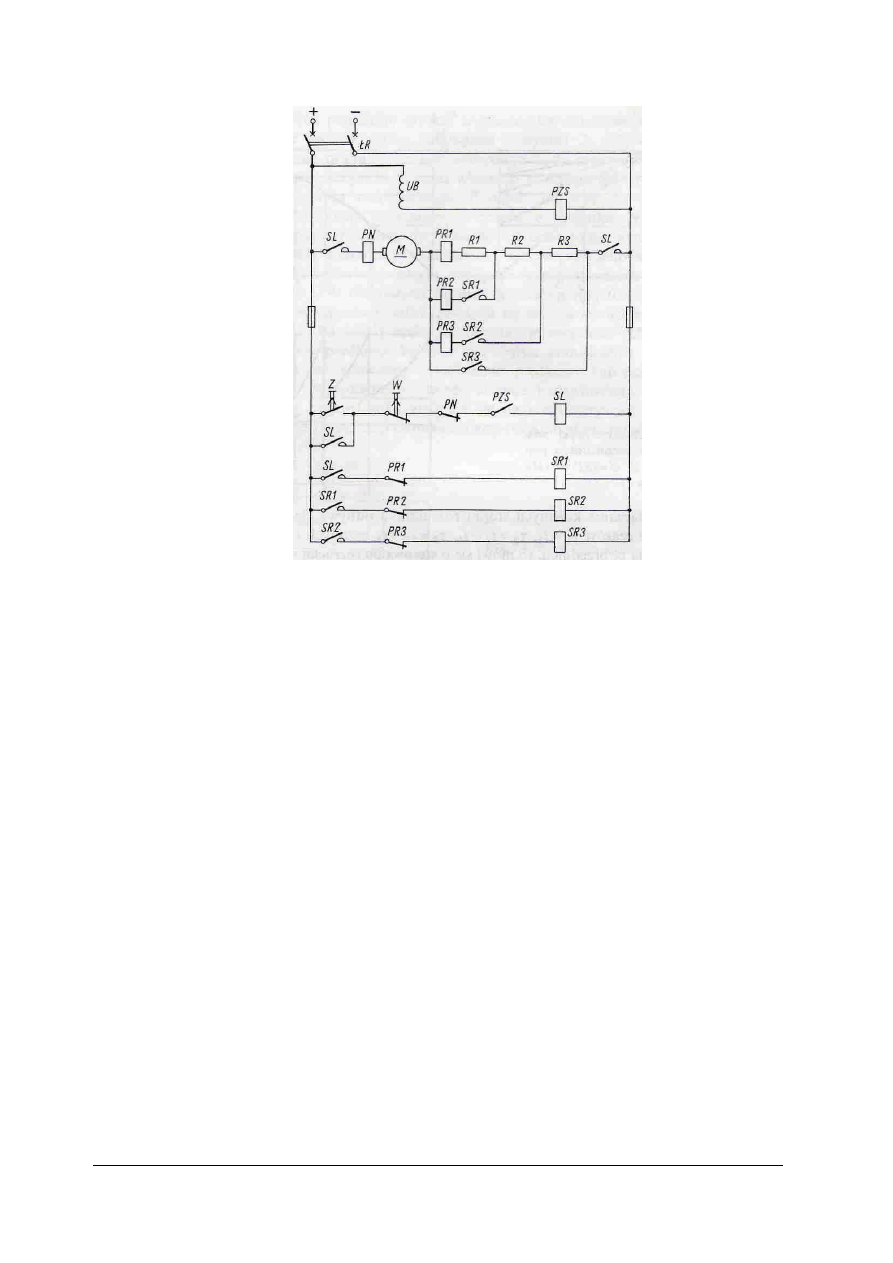
Rys. 12. Układ sterowania w funkcji prądu rozruchowego silnika bocznikowego prądu stałego [17, s. 126]
R1, R2, R3 – rezystory rozruchowe, PR1, PR2, PR3 - przekaźniki rozruchowe (przekaźniki prądowe),
SR1, SR2, SR3 – styczniki rozruchowe, PZS – przekaźnik zaniku strumienia magnetycznego, PN – przekaźnik
nadmiarowy bezzwłoczny, SL - stycznik.
W układzie powyższym (rys. 12) wykorzystuje się fakt, że czas zadziałania stycznika jest
dłuższy od czasu zadziałania przekaźnika. Załączenie silnika odbywa się zgodnie z kolejnością:
ŁR +, Z ±, SL ++, S + (silnik rusza).
Przepływ prądu rozruchowego I
2
przez przekaźnik rozruchu PR1 powoduje otwarcie jego
zestyku rozwiernego, przed zadziałaniem stycznika rozruchowego SR1. Gdy prąd osiągnie
założoną wartość minimalną prądu rozruchowego I, wyłącza się przekaźnik rozruchowy PR1,
załącza się stycznik SR1 zwierając R1. Podobnie można prześledzić tory przepływu prądów I
2
, I
3
.
Wyłączenie silnika następuje wg kolejności W ±, SL --, S – (silnik wyłączony),
a jednocześnie SR1 -, SR2 -, SR3 -. Elementy układu sterowania wracają więc do położenia
spoczynkowego.
Przekaźnik PN jest przekaźnikiem nadmiarowym bezzwłocznym, który wyłącza silnik z sieci
przy zbyt dużych przeciążeniach prądowych. Przekaźnik PZS jest przekaźnikiem zaniku
strumienia magnetycznego wzbudzenia.
Hamowanie elektrycznego napędu wymaga zmiany kierunku momentu obrotowego maszyny
napędowej na przeciwny kierunek w stosunku do kierunku wirowania przy pracy silnikowej.
Można wyróżnić następujące rodzaje hamowania elektrycznego:
− dynamiczne,
− przeciwprądowe,
− odzyskowe.
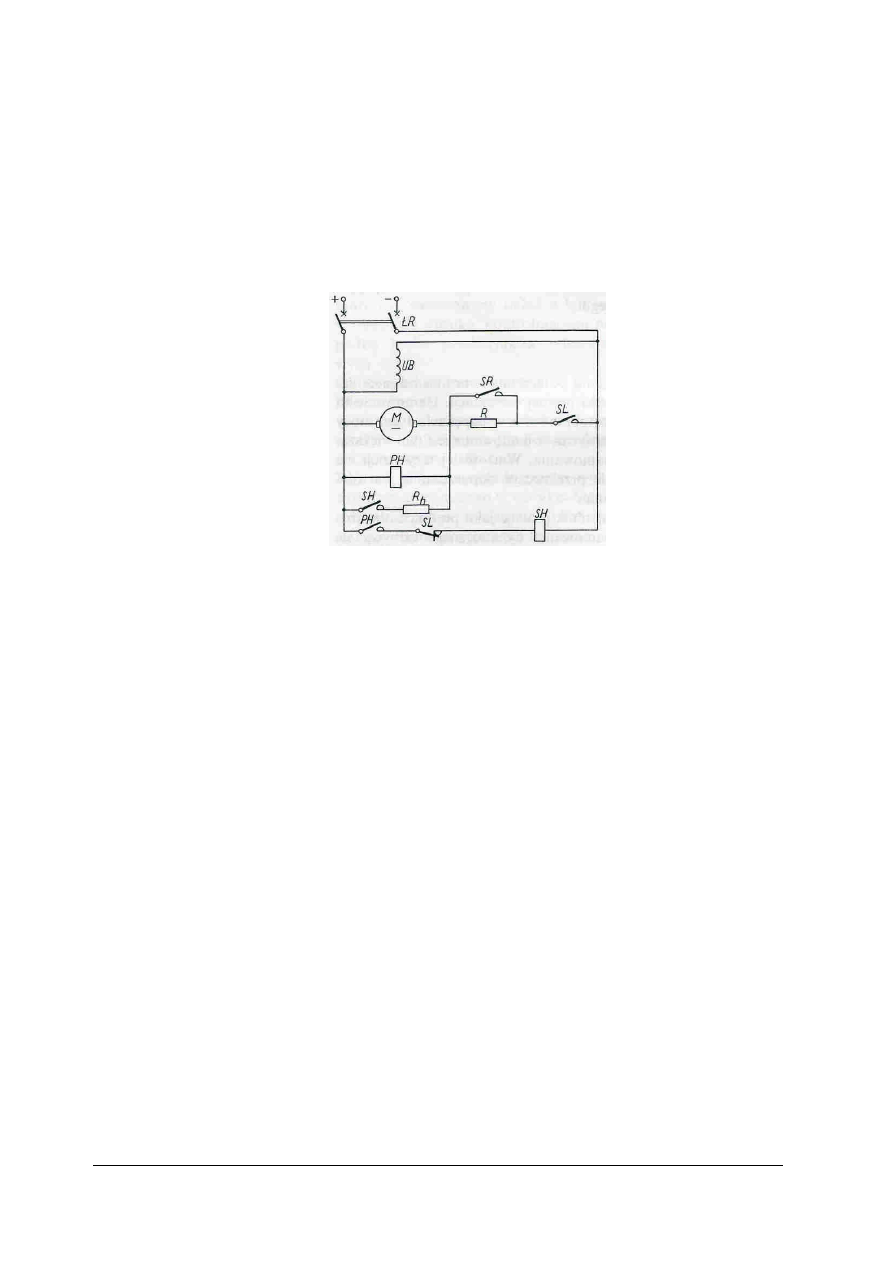
Hamowanie dynamiczne (rys. 13) wymaga odłączenia twornika od sieci zasilającej
i włączeniu na jej zaciski pewnej rezystancji. Rezystancja ta nie powinna być zbyt mała, aby nie
przekroczyć dopuszczalnej wartości maksymalnego prądu hamowania.
„
Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
39
Hamowanie przeciwprądowe polega na zmianie biegunowości zasilania twornika. Również
w tym przypadku dla ograniczenia prądu hamowania włącza się w szereg z twornikiem
rezystancję dodatkową.
Hamowanie odzyskowe, zwane inaczej generatorowym, wykorzystuje tę właściwość, że po
przekroczeniu prędkości kątowej idealnego biegu jałowego, następuje przejście od pracy
silnikowej do pracy prądnicowej. Zwiększenie prędkości kątowej powoduje zwiększenie siły
elektromotorycznej, prąd zmienia swój kierunek na przeciwny i płynie do sieci. Przy hamowaniu
odzyskowym energia wraca do źródła prądu stałego zasilającego silnik.
Rys. 13. Układ sterowania hamowania dynamicznego silnika bocznikowego prądu stałego [17, s. 136]
PH – przekaźnik hamowania, R
h
– rezystor hamowania, SH – stycznik hamowania, SL – stycznik,
SR – stycznik rozruchowy.
Układy napędowe, w których zastosowano przyrządy półprzewodnikowe mocy, są nazywane
energoelektronicznymi układami napędowymi. Wykonuje się je w układzie otwartej pętli regulacji
lub w układzie zamkniętej pętli regulacji. Proste energoelektroniczne układy napędowe w otwartej
pętli sterowania nie mają układów sprzężeń zwrotnych (układów pomiaru prędkości, momentu,
prądu, położenia). Są to układy tanie, ale mało dokładne, w których odwzorowanie zadanej
prędkości kątowej silnika nie są większe niż 2 ÷ 5% maksymalnej prędkości kątowej. Układy
pracujące w pętli zamkniętej, mające sprzężenia zwrotne (prędkości kątowej, prądu, momentu,
położenia), umożliwiają uzyskanie dużych dokładności sterowania w odniesieniu do wielkości
zadanej i to zarówno w stanie ustalonej pracy, jak i w stanie dynamicznym.
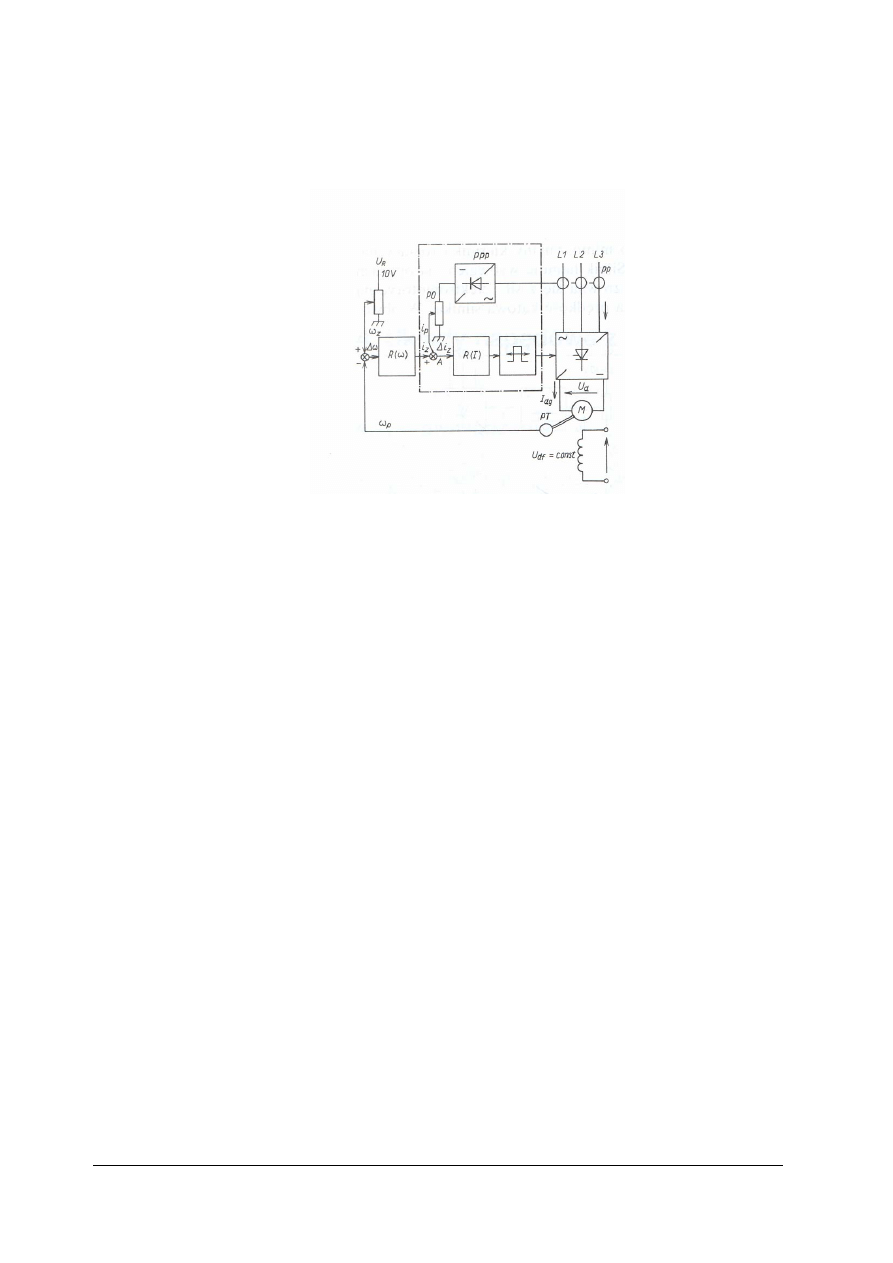
W praktyce stosuje się jednokierunkowy układ napędowy z obwodem prędkościowego
sprzężenia zwrotnego i obwodem pętli sprzężenia prądowego (rys. 14). O przebiegu prądu
w stanach dynamicznych (np. rozruch) decyduje pętla prądowa, zaznaczona na rysunku linią
punktową. Za pomocą potencjometru zadającego prędkość kątową, ustala się wartość skokową
napięcia U
R
, w wyniku czego następuje rozruch silnika. Z regulatora prędkości kątowej R(ω)
podawany jest na wejście regulatora R(I) sygnał maksymalny prądu zadanego i
z
. Sygnał ten
powoduje wysterowanie tyrystorów przekształtnika i przepływ prądu I
da
przez silnik. Na wyjściu
prostownika pomiaru prądu PPP otrzymuje się sygnał prądu pomierzonego i
p
, który jest wprost
proporcjonalny do prądu wyprostowanego I
da
płynącego przez silnik. Sygnał prądu pomierzonego
i
p
ma znak przeciwny niż sygnał prądu zadanego i
z
. Różnica tych sygnałów ∆ i
z
powoduje
wysterowanie regulatora prądu R(I) i przepływ prądu o określonej wartości w okresie rozruchu.
Wartość maksymalna prądu silnika I
da
w okresie rozruchu jest nazywana prądem ograniczenia I
dg
(nastawia się ją podczas rozruchu technologicznego poniżej obciążalności dopuszczalnej silnika
napędowego lub granicznej obciążalności prądowej tyrystorów przekształtnika i nie zmienia się
już w trakcie eksploatacji). Po zakończeniu rozruchu silnika sygnały prądu zadanego i
z
„
Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
40
oraz pomierzonego i
p
mają mniejsze wartości i sterowanie pracą przekształtnika przejmuje
regulator prędkości kątowej R(ω), odpowiedzialny za stabilizację prędkości kątowej.
Rys. 14. Jednokierunkowy układ napędowy [7, s. 179]
ω
z
–prędkość kątowa zadana, ω
p
- prędkość kątowa pomierzona, ∆ω - różnica prędkości kątowej,
i
z
- prąd zadany, i
p
- prąd pomierzony, ∆ i
z
- różnica prądu, PP – przekładniki pomiarowe prądu,
PPP – prostownik pomiaru prądu, PO – potencjometr służący do ograniczenia prądu,
PT – prądnica tachometryczna, R() – regulator prędkości, R(I) – regulator prądu
W stanie pracy ustalonej, sygnał prędkości zadanej ω
z
(napięcie odniesienia U
R
) jest
porównywany z sygnałem prędkości mierzonej ω
p
(napięcie prądu stałego uzyskane z prądnicy
tachometrycznej PT). Sygnał uchybu prędkości ( bardzo mały dzięki bardzo dużym
wzmocnieniom statycznym wzmacniaczy) powoduje wysterowanie wzmacniacza prędkości R(ω)
tak, aby prędkość kątowa silnika była równa prędkości zadanej.
W układzie powyższym prostownik sterowany przewodził prąd twornika tylko w jednym
kierunku. Aby uzyskać układ napędowy, który pracuje przy dwóch kierunkach wirowania silnika
i umożliwia, dla każdego kierunku prędkości kątowej, przepływ prądu w obu kierunkach, należy
zastosować dwie sekcje prostownika, połączone odwrotnie równolegle. Taki nawrotny układ
napędowy realizuje zmianę kierunku obrotów silnika poprzez zmianę kierunku prądu w tworniku.
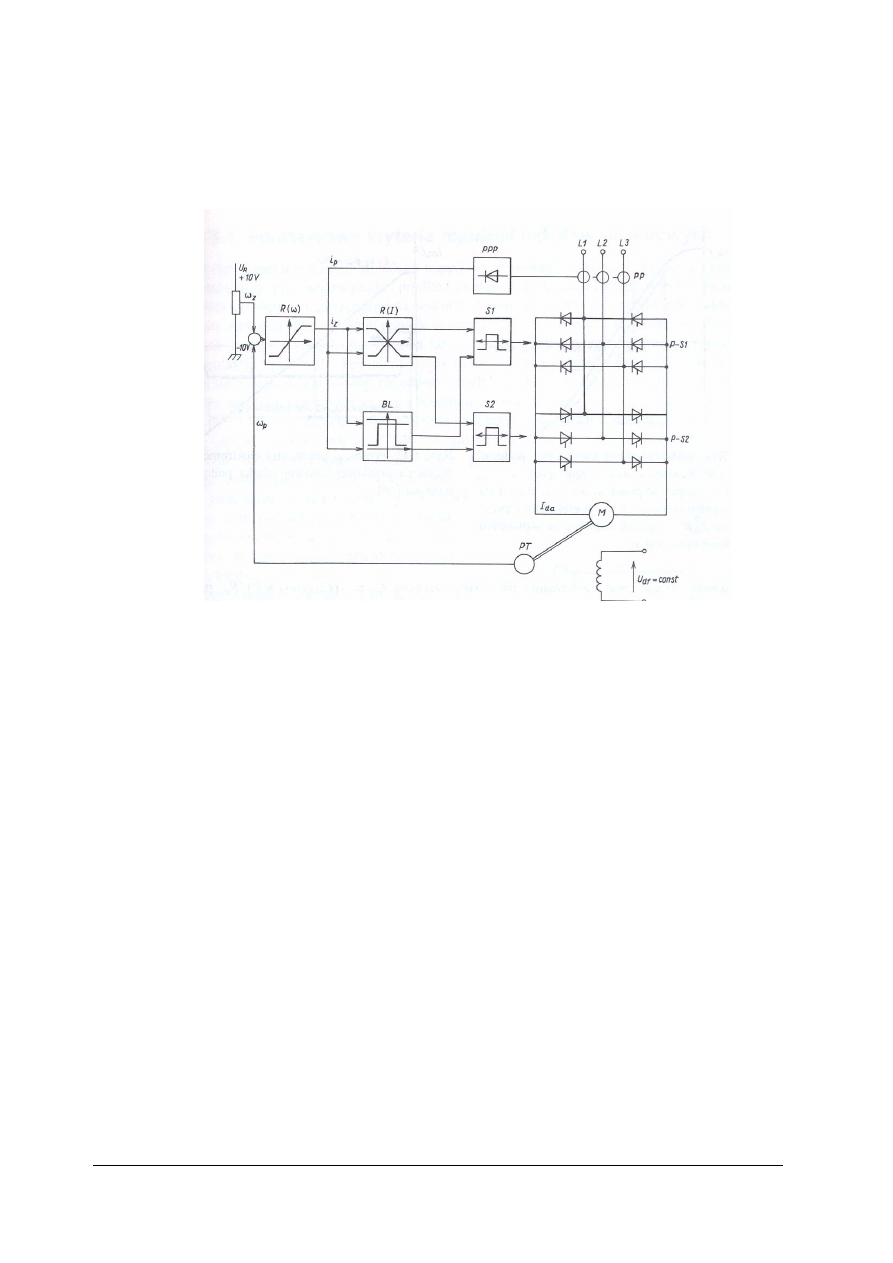
Nawrotny tyrystorowy układ napędowy (rys.15.), pracujący bez prądów wyrównawczych, ma
dwie sekcje prostownika P S1 oraz P-S2 (każda przewodzi prąd tylko w jednym kierunku). Każda
sekcja jest sterowana własnym sterownikiem (S1 i S2) i kiedy jedna z nich pracuje to druga jest
zablokowana (człon blokady pracy BL jest odpowiedzialny za wprowadzenie odpowiedniej sekcji
do pracy). Praca sekcji zależy to od znaku sygnału prądu zadanego i
z
, a przełączenie z jednej
sekcji na drugą następuje w chwili gdy wartość prądu pomierzonego i
p
jest równa 0. Regulator
prądu R(I) ma dwa wyjścia, które odpowiednio sterują pracą: pierwszej sekcji – pierwsze wyjście,
drugiej sekcji – drugie wyjście. Sposób pracy regulatorów prądu R(I) i prędkości kątowej R(ω)
jest podobny do sposobu omówionego powyżej dla układu jednokierunkowego. w celu dokonania
nawrotu silnika zmieniamy potencjometrem U
R
sygnał wartości zadanej z wartości +10 V
(odpowiada prędkości kątowej +ω
N
) na wartość –10 V (odpowiada to prędkości kątowej silnika
- ω
N
). W wyniku tej zmiany następuje przesterowanie regulatora prądu R(I) oraz zanik prądu
twornika w sekcji S1, który umożliwia blokadzie pracy BL wyłączenie sekcji prostownika P-S1
( w wyniku wygaszenia impulsów sterujących w S1) oraz wprowadzenie do pracy sekcji
prostownika P-S2. Regulator prądu R(I) wprowadza stopniowo do pracy falownikowej
„
Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
41
(hamowanie) sekcję P-S2 prostownika, zmniejszając kąt wysterowania tyrystorów. Przejście
z pracy falownikowej prostownika (hamowanie) do pracy prostownikowej odbywa się płynnie.
W omawianym układzie problem rozruch, hamowania i nawrotu ogranicza się tylko do zmiany
zadanej wartości prędkości kątowej ω
z
.
Rys. 15. Nawrotny tyrystorowy układ napędowy pracujący bez prądów wyrównawczych [7s. 181]
ω
z
–prędkość kątowa zadana, i
z
- prąd zadany, i
p
- prąd pomierzony, ∆ i
z
- różnica prądu, PP – przekładniki
pomiarowe prądu, PPP – prostownik pomiaru prądu, BL – człon blokady pracy, P-S1 i P-S2 sekcje
prostownika,S1 i S2 sterowniki sekcji prostownika,PT – prądnica tachometryczna, R(ω) – regulator prędkości,
R(I) – regulator prądu
4.3.2. Pytania sprawdzające
Odpowiadając na pytania sprawdzisz, czy jesteś przygotowany do wykonania ćwiczeń.
1. Jakie zadania i oczekiwania stawiane są sterowaniu?
2. Jakie znasz rodzaje sterowania?
3. Jakie czynniki spowodowały, iż napęd elektryczny jest najczęściej stosowany w układach
automatyki?
4. Jak jest różnica pomiędzy jednokierunkowym a nawrotnym tyrystorowym układem
napędowym?
5. Jak nazywa się urządzenie wytwarzające impulsy sterujące?
6. Jaka jest różnica między oznaczeniami + i ++?
7. Jaką rolę pełnią układy przekaźnikowo-stycznikowe?
4.3.3. Ćwiczenia
Ćwiczenie 1
Dla układu jak na rysunku (rysunek do ćwiczenia 1) narysuj diagram czasowy.
„
Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
42
Rysunek do ćwiczenia 1. Schemat układu blokady załączeniowej [17, s. 59]
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie powinieneś:
1) zapoznać się z instrukcją wykonania ćwiczenia,
2) zorganizować stanowisko pracy do wykonania ćwiczenia,
3) sporządzić diagram,
4) zaprezentować wykonane ćwiczenie,
5) dokonać oceny poprawności wykonanego ćwiczenia,
6) sporządzić sprawozdanie z przebiegu ćwiczenia, załączając schemat układu, otrzymane
wyniki i wnioski z badań.
Wyposażenie stanowiska pracy:
− instrukcja ćwiczenia,
− notatnik,
− literatura z rozdziału 6 wskazana przez nauczyciela.
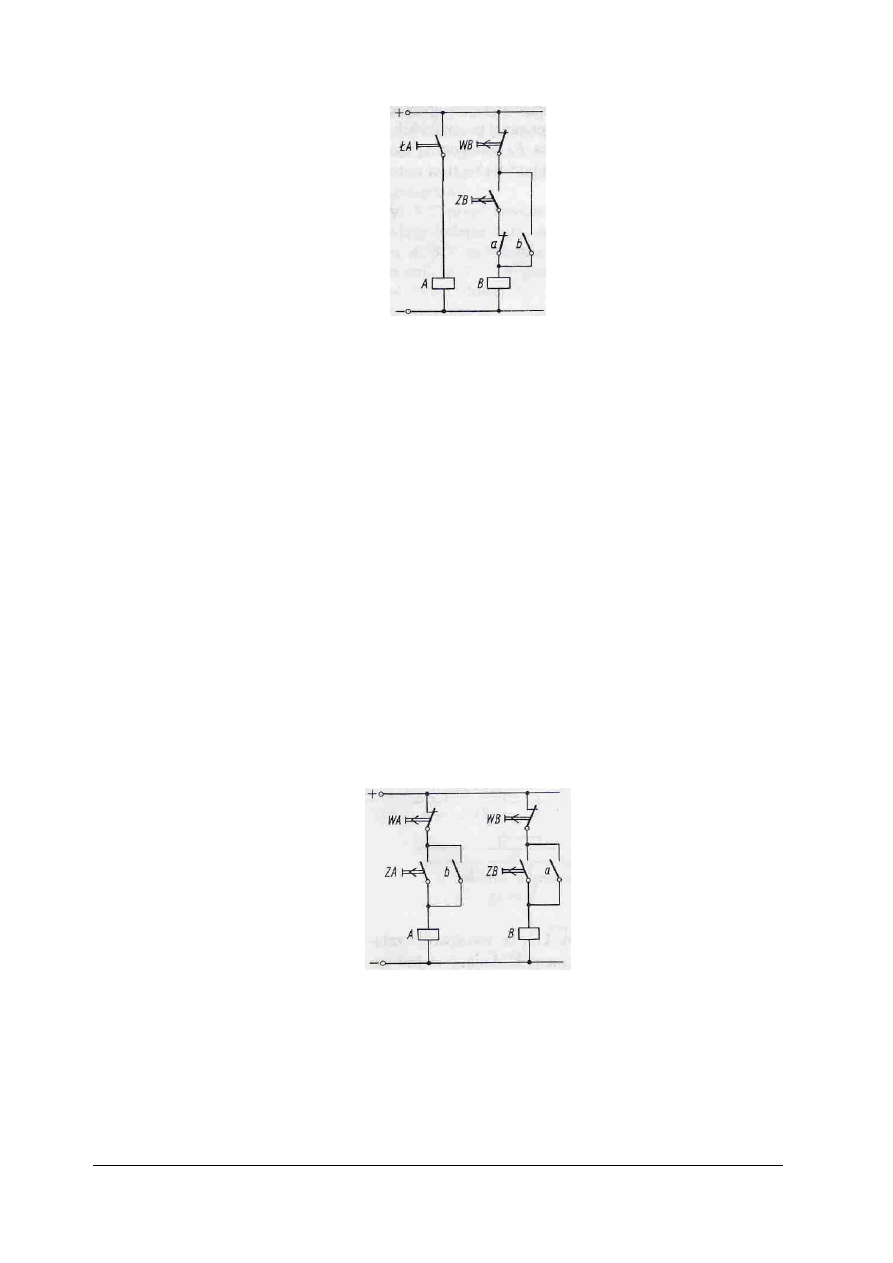
Ćwiczenie 2
Dla układu jak na rysunku (rysunek do ćwiczenia 2) narysuj diagram czasowy oraz
zaprojektuj układ w technice cyfrowej, realizujący funkcję tego układu.
Rysunek do ćwiczenia 2. Schemat układu blokady współdziałającej równorzędnej [17, s. 57]
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie powinieneś:
1) zapoznać się z instrukcją wykonania ćwiczenia,
2) zorganizować stanowisko pracy do wykonania ćwiczenia,
3) sporządzić diagram,
„
Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
43
4) zaprojektować układ w technice cyfrowej,
5) zaprezentować wykonane ćwiczenie,
6) dokonać oceny poprawności wykonanego ćwiczenia,
7) sporządzić sprawozdanie z przebiegu ćwiczenia, załączając schemat układu, otrzymane
wyniki i wnioski z badań.
Wyposażenie stanowiska pracy:
− instrukcja ćwiczenia,
− notatnik,
− literatura z rozdziału 6 wskazana przez nauczyciela.
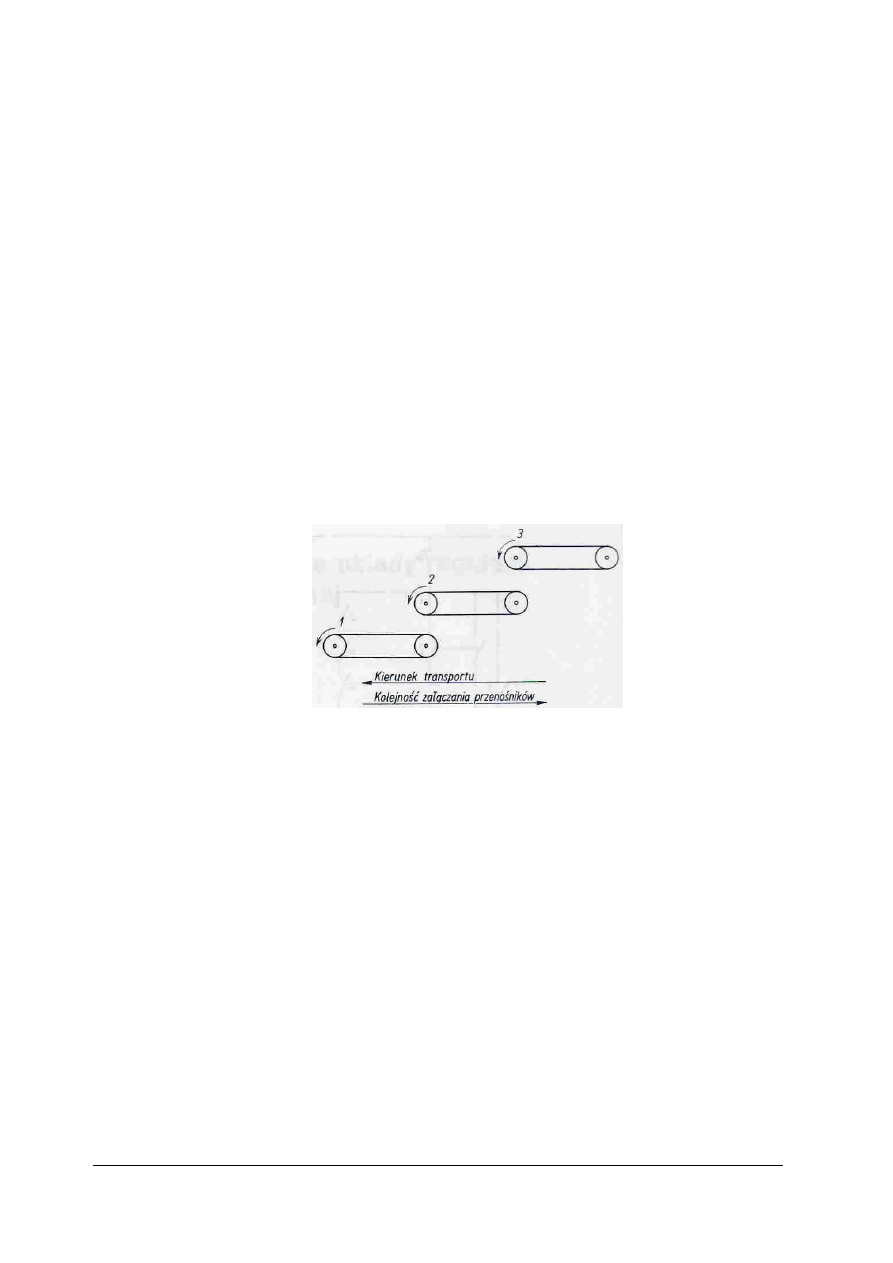
Ćwiczenie 3
Na rysunku do ćwiczenia przedstawiono schemat transportu taśmowego. Narysuj diagram
czasowy oraz zaprojektuj układ w technice cyfrowej, realizujący funkcję układu transportu
taśmowego. Zwrócić uwagę na to, że kolejność załączenia przenośników 1, 2, 3 powinna być
odwrotna w stosunku do kierunku transportu. W chwili zatrzymania jednego z przenośników
powinny zostać automatycznie zatrzymane zasilające go przenośniki, natomiast przenośniki
odprowadzające materiał transportowany powinny być jeszcze tak długo załączone, dopóki nie
przetransportują znajdującego się na nich materiału.
Rysunek do ćwiczenia 3. Schemat transportu taśmowego [17, s. 61]
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie powinieneś:
1) zapoznać się z instrukcją wykonania ćwiczenia,
2) zorganizować stanowisko pracy do wykonania ćwiczenia,
3) sporządzić diagram,
4) zaprojektować układ,
5) zaprezentować wykonane ćwiczenie,
6) dokonać oceny poprawności wykonanego ćwiczenia,
7) sporządzić sprawozdanie z przebiegu ćwiczenia, załączając schemat układu, otrzymane
wyniki i wnioski z badań.
Wyposażenie stanowiska pracy:
− instrukcja ćwiczenia,
− notatnik,
− literatura z rozdziału 6 wskazana przez nauczyciela.
„
Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
44
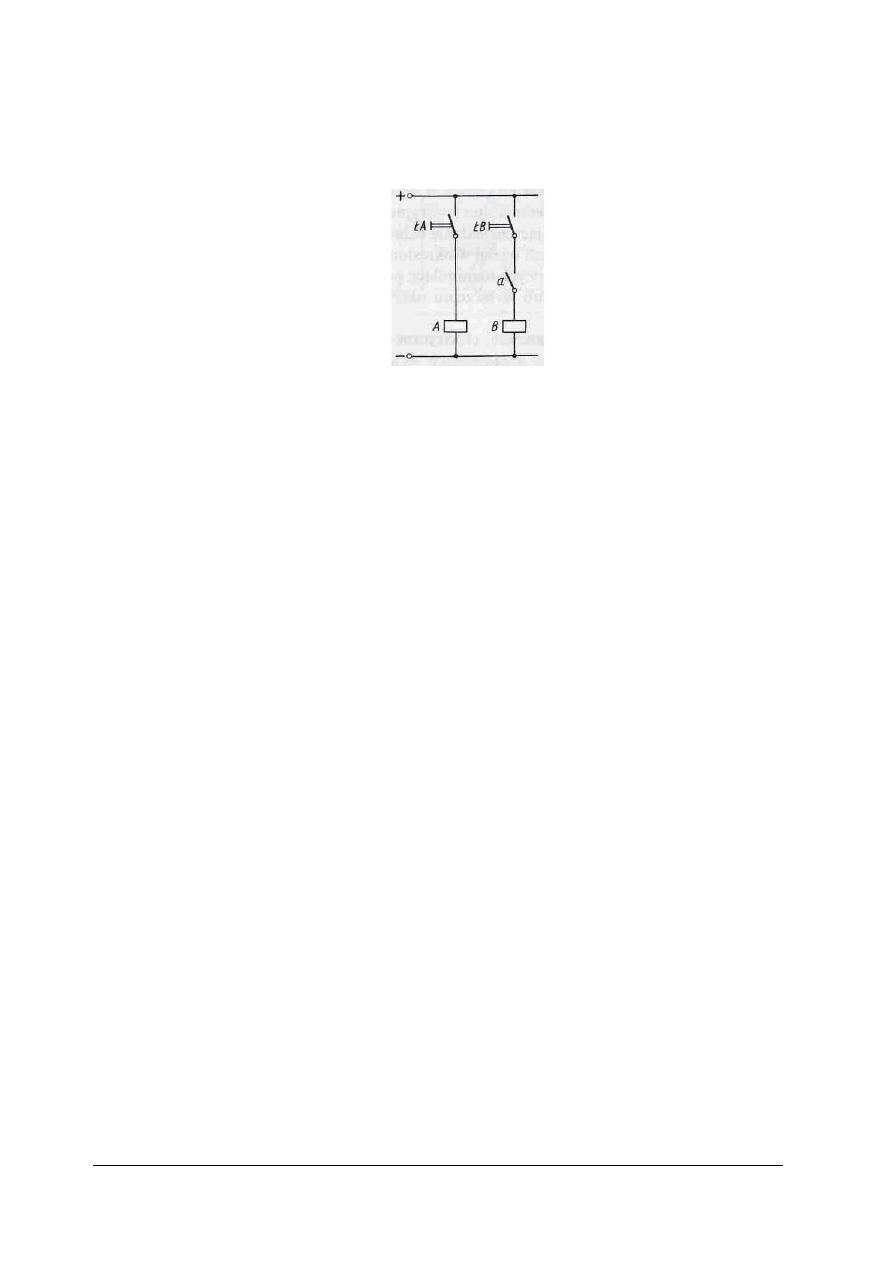
Ćwiczenie 4
Zaprojektuj układ z blokadą. Ćwiczenie wykonać wykorzystując stanowisko laboratoryjne
wyposażone w regulatory wielofunkcyjne np.: SPS-400, SIPART DR XX, itp.
Rysunek do ćwiczenia 4. Schemat układu z blokadą [16, s. 56]
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie powinieneś:
1) zapoznać się z instrukcją wykonania ćwiczenia,
2) zorganizować stanowisko pracy do wykonania ćwiczenia,
3) zaprojektować układ (algorytm),
4) zaprogramować regulator,
5) połączyć układ,
6) zgłosić gotowość wykonania ćwiczenia prowadzącemu,
7) po sprawdzeniu poprawności projektu i połączeń przez nauczyciela oraz otrzymaniu
zezwolenia, przystąpić do sprawdzenia poprawności działania układu,
8) zaobserwować wpływ wprowadzanych zmian na działanie układu,
9) zaprezentować wykonane ćwiczenie,
10) dokonać oceny poprawności wykonanego ćwiczenia,
11) sporządzić sprawozdanie z przebiegu ćwiczenia, załączając algorytm działania układu,
wydruk programu, otrzymane wyniki, wnioski z badań.
Wyposażenie stanowiska pracy:
− stanowisko laboratoryjne z regulatorem wielofunkcyjnym,
− komputer z odpowiednim oprogramowaniem,
− drukarka,
− przewody łączące,
− literatura z rozdziału 6 wskazana przez nauczyciela.
Ćwiczenie 5
Rysunek przedstawia prostą sygnalizację świetlną bramy wjazdowej na teren szkoły. Portier
ręcznie włącza przyciskiem sterowniczym czerwone i zielone światło według następującego
algorytmu:
− zielona lampka sygnalizacyjna świeci się po wciśnięciu przycisku S1,
− czerwona lampka sygnalizacyjna świeci się po wciśnięciu przycisku S2,
− żadna lampka się nie świeci, gdy jednocześnie zostaną wciśnięte oba przyciski.
Jednoczesne wciśnięcie obu przycisków jest może doprowadzić do powstania niebezpiecznej
sytuacji podczas kierowania ruchem w bramie wjazdowej. Zaprojektuj układ sterowania, który
pomimo błędnej obsługi urządzenia będzie zapobiegał powstaniu niebezpiecznej sytuacji. Zastosuj
tzw. blokadę. Zmontuj zaprojektowany układ z blokadą przełącznikową.
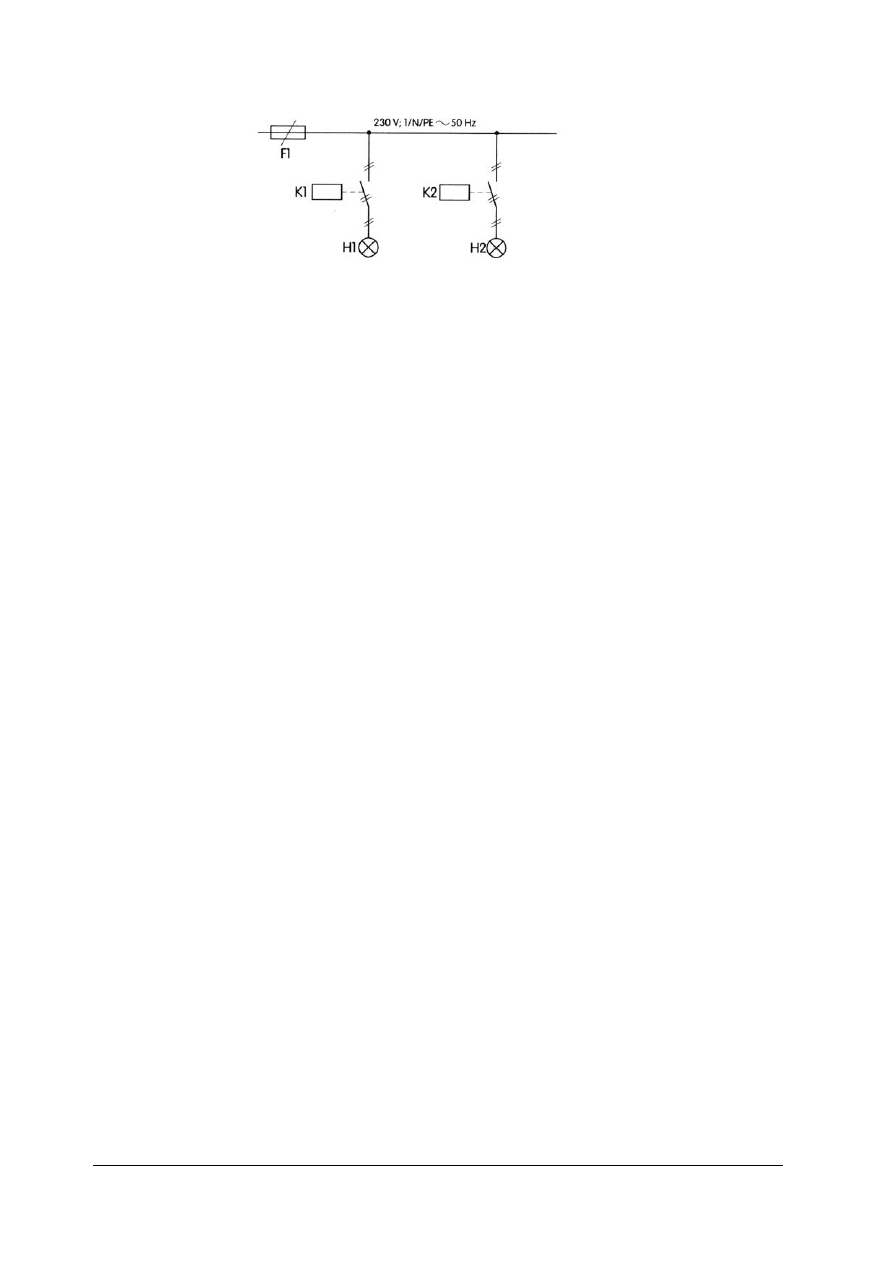
„
Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
45
Rysunek do ćwiczenia 5. Fragment schematu urządzenia sygnalizacyjnego [6, s. 19]
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie powinieneś:
1) zapoznać się z instrukcją wykonania ćwiczenia,
2) zorganizować stanowisko pracy do wykonania ćwiczenia,
3) połączyć układ sterowania bez blokady,
4) zgłosić gotowość wykonania sprawdzenia układu,
5) sprawdzić działanie układu,
6) zaprojektować schemat układu sterowania urządzenia sygnalizacyjnego z blokadą
przełącznikową,
7) połączyć układ,
8) zgłosić gotowość wykonania ćwiczenia prowadzącemu,
9) po sprawdzeniu poprawności projektu i połączeń przez nauczyciela oraz otrzymaniu
zezwolenia, przystąpić do sprawdzenia poprawności działania układu,
10) zaobserwować wpływ wprowadzonych zmian na działanie układu,
11) zaprezentować wykonane ćwiczenie,
12) dokonać oceny poprawności wykonanego ćwiczenia,
13) sporządzić sprawozdanie z przebiegu ćwiczenia, załączając schemat układu sterowania,
analizę działania układu, wnioski z badań.
Wyposażenie stanowiska pracy:
− stanowisko laboratoryjne z możliwością podłączenia się do sieci napięcia przemiennego 230
V, 50 Hz z przewodem ochronnym,
− przyciski sterownicze ze stykiem zwiernym (13/14) i stykiem rozwiernym (21/22),
− styczniki pomocnicze (sterownicze),
− lampki sygnalizacyjne: zielona i czerwona,
− bezpiecznik topikowy,
− przewody łączące,
− instrukcja ćwiczenia,
− katalogi przycisków,
− literatura z rozdziału 6 wskazana przez nauczyciela.
Ćwiczenie 6
Montowanie i badanie układu nawrotnego sterowania indukcyjnego silnika klatkowego
przedstawionego na rysunku do ćwiczenia. Opis układu: „Silnik załączany jest bezpośrednio
włącznikiem Q znajdującym się w obwodzie głównym (prądowym) silnika. W obwodzie tym
znajdują się zestyki stycznika K1, załączające prawe obroty silnika, zestyki stycznika K2,
załączające lewe obroty silnika oraz styki przekaźnika termicznego Kυ, zabezpieczającego silnik
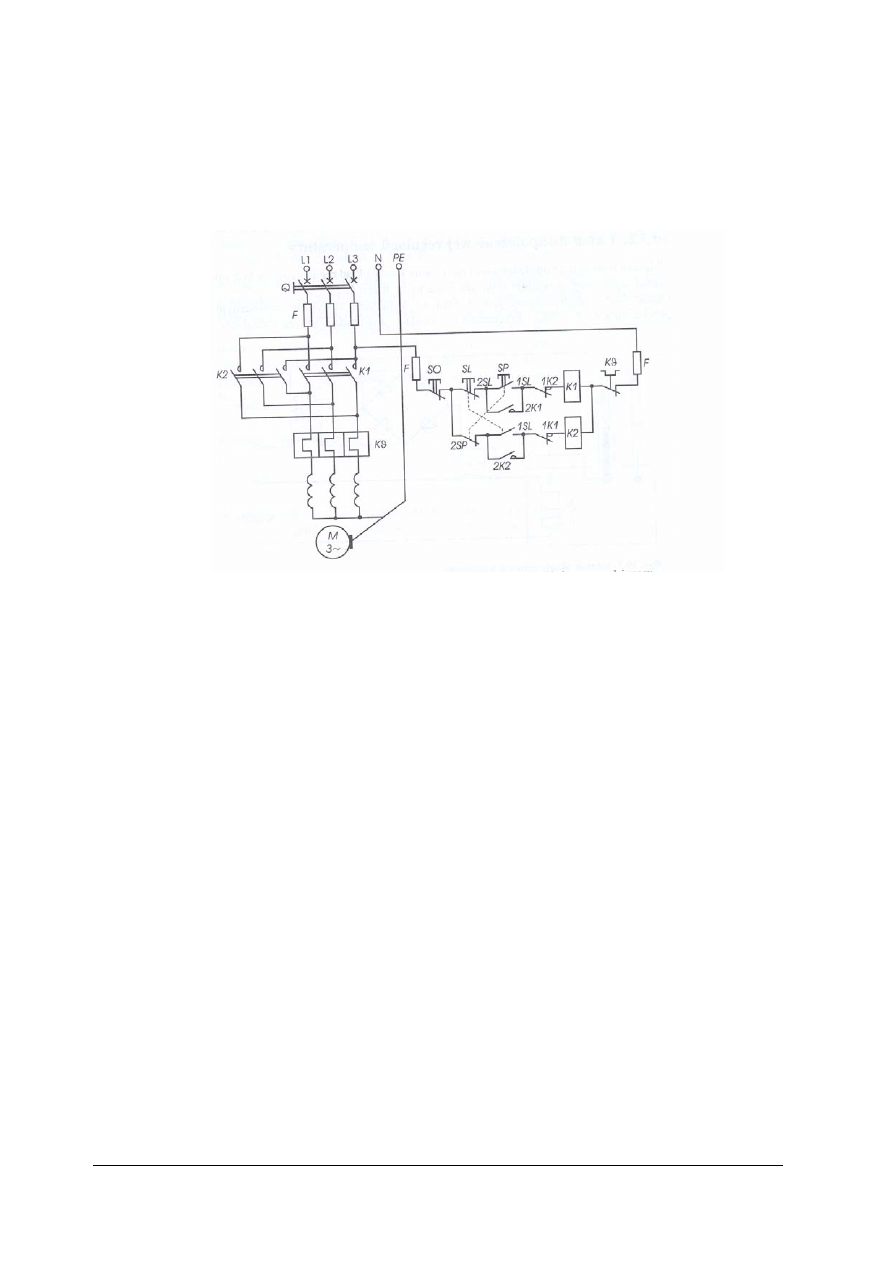
„
Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
46
przed długotrwałym przeciążeniem. Zestyk bierny przekaźnika termicznego rozwiera wszystkie
obwody zasilania cewek styczników K1 i K2, co powoduje rozłączenie zestyków obwodu
głównego K1, K2 i zatrzymanie silnika. Silnik można zatrzymać ręcznie przyciskiem
rozłączającym (biernym) SO lub wyłącznikiem Q. W układzie sterowania znajduje się cewka
stycznika K1 oraz cewka stycznika K2. Przyciski SP i SL służą do włączania prawych i lewych
obrotów silnika”.
Rysunek do ćwiczenia 6. Schemat układu nawrotnego sterowania indukcyjnego silnika klatkowego
małej mocy [9, s. 91]
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie powinieneś:
1) zapoznać się z instrukcją wykonania ćwiczenia,
2) zorganizować stanowisko pracy do wykonania ćwiczenia,
3) zapoznać się z charakterystykami i budową elementów układu sterowania elektrycznego,
4) zidentyfikować rodzaje zestyków i sposób połączenia cewek,
5) zmierzyć rezystancję cewek styczników i przekaźników,
6) ocenić na podstawie pomiarów ich stan,
7) ocenić stan zestyków,
8) określić czy wszystkie elementy są dobre, jeżeli nie, to wskazać uszkodzone,
9) połączyć układ nawrotnego sterowania indukcyjnego silnika klatkowego,
10) zgłosić gotowość wykonania sprawdzenia układu,
11) po sprawdzeniu poprawności projektu i połączeń przez nauczyciela oraz otrzymaniu
zezwolenia, przystąpić do sprawdzenia poprawności działania układu,
12) zaprezentować wykonane ćwiczenie,
13) dokonać oceny poprawności wykonanego ćwiczenia,
14) sporządzić sprawozdanie z przebiegu ćwiczenia, załączając schemat układu sterowania,
analizę działania układu, wnioski z badań.
Wyposażenie stanowiska pracy:
− stanowisko laboratoryjne z możliwością podłączenia się do sieci trójfazowej napięcia
przemiennego z przewodem ochronnym,
− trójfazowy silnik indukcyjny klatkowy małej mocy,

„
Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
47
− włącznik,
− styczniki dobre i uszkodzone,
− przekaźniki dobre i uszkodzone,
− przekaźnik termiczny,
− bezpieczniki topikowe,
− przyciski,
− mierniki uniwersalne,
− przewody łączące,
− przybory monterskie,
− instrukcja ćwiczenia,
− katalogi przycisków, przekaźników, styczników,
− literatura z rozdziału 6 wskazana przez nauczyciela.
Ćwiczenie 7
Zaprojektuj i wykonaj model przełącznika schodowego wraz z układem logicznym
sterującym przełączaniem diody LED symulującej żarówkę.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie powinieneś:
1) zapoznać się z instrukcją wykonania ćwiczenia,
2) zorganizować stanowisko pracy do wykonania ćwiczenia,
3) narysować schemat przełącznika schodowego żarówki,
4) sporządzić tablicę prawdy układu dla sygnałów wejściowych przycisków Q1 i Q2 i sygnału
wyjściowego (żarówki) E1,
5) narysować schemat układu logicznego sterującego przełączaniem żarówki,
6) wykonać model układu przełącznika schodowego,
7) wykonać układ sterowania z zastosowaniem bramek logicznych,
8) zgłosić gotowość wykonania sprawdzenia układu,
9) po sprawdzeniu poprawności projektu i połączeń przez nauczyciela oraz otrzymaniu
zezwolenia, przystąpić do sprawdzenia poprawności działania układu,
10) zaprezentować wykonane ćwiczenie,
11) dokonać oceny poprawności wykonanego ćwiczenia,
12) sporządzić sprawozdanie z przebiegu ćwiczenia, załączając schemat układu sterowania,
analizę działania układu, wnioski z badań.
Wyposażenie stanowiska pracy:
− stanowisko laboratoryjne przyciski,
− żarówka,
− bramki logiczne,
− płytka obwodu drukowanego,
− przybory monterskie,
− lutownica,
− mierniki uniwersalne,
− przewody łączące,
− instrukcja ćwiczenia,
− literatura z rozdziału 6 wskazana przez nauczyciela.
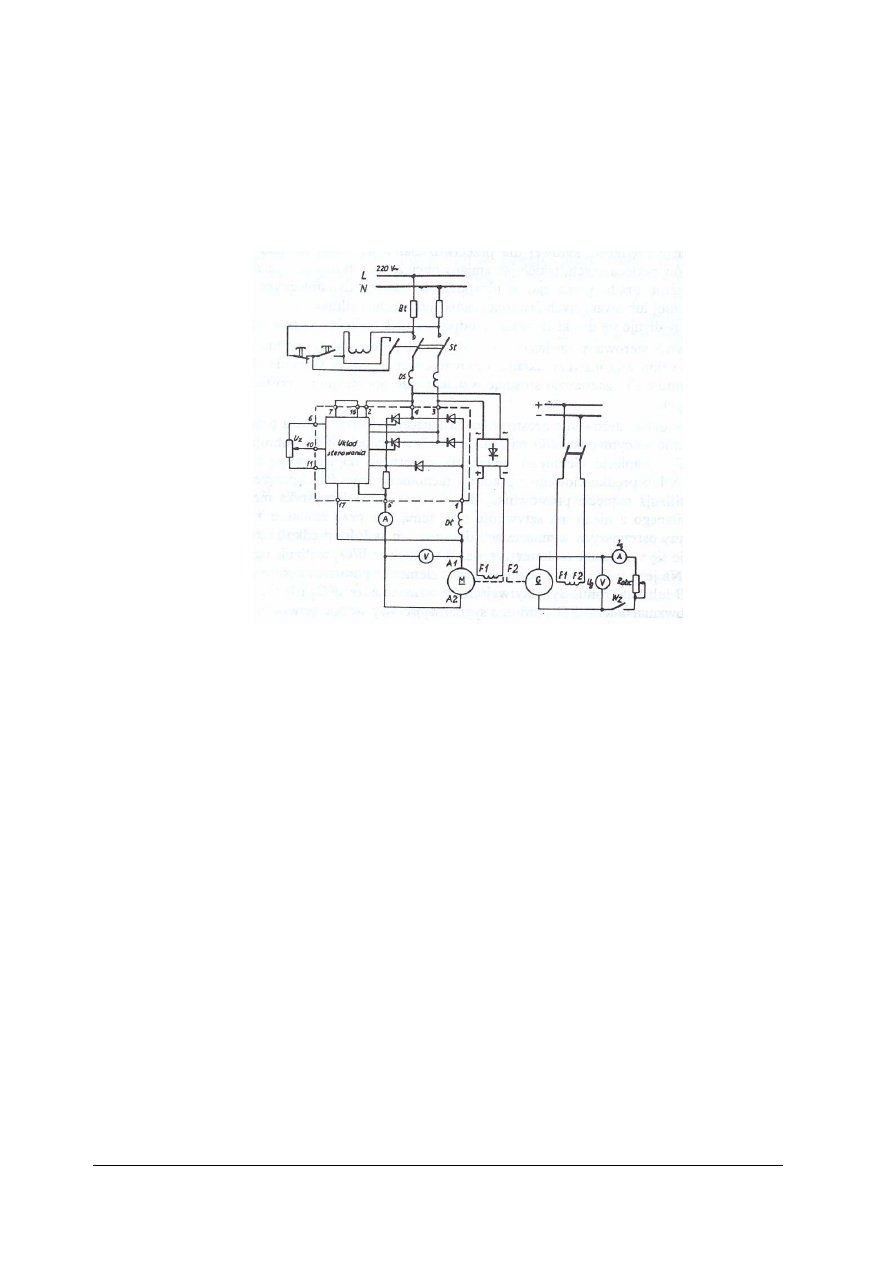
„
Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
48
Ćwiczenie 8
Montowanie i badanie układu silnika obcowzbudnego zasilanego prostownikiem sterowanym
przedstawionego na rysunku do ćwiczenia. Opis układu: „ Badany układ składa się z prostownika
sterowanego z układem sterowania, silnika, maszyny obciążającej (prądnica prądu stałego).
Wzbudzenie silnika jest zasilane z prostownika niesterowanego. Prędkość kątową silnika nastawia
się za pomocą potencjometru przez zmianę napięcia zadającego U
z
. Prądnica jest obciążona
rezystorem R
obc
.
Rysunek do ćwiczenia 8. Schemat układu pomiarowego [8, s. 398]
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie powinieneś:
1) zapoznać się z instrukcją wykonania ćwiczenia,
2) zorganizować stanowisko pracy do wykonania ćwiczenia,
3) zapoznać się z prostownikiem i układem regulacyjnym,
4) połączyć układ zgodnie ze schematem pomiarowym,
5) zgłosić gotowość wykonania badania układu,
6) po sprawdzeniu poprawności połączeń przez nauczyciela oraz otrzymaniu zezwolenia,
przystąpić do badania układu,
7) zdjąć charakterystykę mechaniczną silnika ω = f(M) dla kilku różnych wartości napięcia
zadającego U
z
= const, przy otwartym obwodzie sprzężenia napięciowego oraz przy
zamkniętym obwodzie sprzężenia napięciowego,
8) dokonać pomiary i obliczenia,
9) wykreślić charakterystyki mechaniczne silnika,
10) zaprezentować wykonane ćwiczenie,
11) dokonać oceny poprawności wykonanego ćwiczenia,
12) sporządzić sprawozdanie z przebiegu ćwiczenia, załączając schemat układu sterowania,
analizę działania układu, wnioski z badań.
Wyposażenie stanowiska pracy:
− stanowisko laboratoryjne z możliwością podłączenia się do sieci napięcia przemiennego
230V/50Hz z przewodem ochronnym,

„
Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
49
− silnik obcowzbudny,
− prądnica prądu stałego,
− prostownik z układem sterowania,
− prostownik niesterowany,
− stycznik,
− bezpieczniki topikowe,
− dławik sieciowy,
− dławik wygładzający,
− mierniki uniwersalne,
− przewody łączące,
− przybory monterskie,
− instrukcja ćwiczenia,
− literatura z rozdziału 6 wskazana przez nauczyciela.
4.3.4. Sprawdzian postępów
Tak Nie
Czy potrafisz:
1) wymienić cechy charakterystyczne sterowania sekwencyjnego?
2) wymienić cechy charakterystyczne sterowania programowego?
3) sporządzić opis działania układu przekaźnikowego?
4) narysować diagram czasowy układu przekaźnikowo-stycznikowego?
5) zaprojektować układ sterowania w technice stykowo-przekaźnikowej?
6) napisać prosty program dla sterownika PLC?
7) narysować schemat układu logicznego sterowania?
8) wyjaśnić dlaczego regulacja prędkości kątowej silnika jest w przypadku zasilania
go z prostownika sterowanego mniej energochłonna?
9) sporządzić dokumentację wykonanych połączeń?
10) zmontować układ sterowania na podstawie schematu montażowego?
„
Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
50
5. SPRAWDZIAN OSIĄGNIĘĆ
INSTRUKCJA DLA UCZNIA
1. Przeczytaj uważnie instrukcję zanim zaczniesz rozwiązywać zadania.
2. Podpisz imieniem i nazwiskiem kartę odpowiedzi.
3. Test składa się z 20 zadań dotyczących symboli i oznaczeń stosowanych
w automatyce, łączenia elementów, analizy układów, a także tworzenia schematów
układów.
4. Odpowiedzi udzielaj tylko na załączonym arkuszu.
5. W zadaniu 1 uzupełnij zdanie. W zadaniu 15 odczytaj symboliczny zapis. W zadaniach 4,
5, 18, 20 należy narysować schemat układu lub wykres czasowy. Pozostałe zadania
zawierają cztery odpowiedzi, z których tylko jedna jest poprawna.
6. Zadania punktowane są 0 lub 1.
7. Wybraną odpowiedź zakreśl znakiem X. Jeśli uznasz, że pomyliłeś się i wybrałeś
nieprawidłową odpowiedź, to zakreśl ją kółeczkiem i znakiem X zaznacz prawidłową
odpowiedź.
8. Niektóre zadania mogą sprawiać Ci trudność, dlatego jeśli początkowo wydają Ci się
trudne, rozwiąż pozostałe i ponownie spróbuj rozwiązać trudniejsze.
9. Przed wykonaniem każdego zadania przeczytaj bardzo uważnie polecenie.
10. Na rozwiązanie wszystkich zadań masz 40 minut.
Powodzenia!
ZESTAW ZADAŃ TESTOWYCH
1. Jeżeli zerowemu sygnałowi na wejściu odpowiada stan otwarcia styków, to taki styk
przekaźnika jest................................. .
2. Schemat blokowy ma za zadanie:
a) uprościć schemat ideowy,
b) przedstawić sposób montażu elementów,
c) ułatwić zrozumienie zasady działania układu,
d) przedstawić zależności czasowe między elementami.
3. Schemat automatyzacji jest to schemat:
a) technologiczny z symbolami i oznaczeniami układów automatyki,
b) ilustrujący przebieg procesu technologicznego,
c) uproszczony, synoptyczny,
d) przedstawiający szczegóły konstrukcyjno-wykonawcze.
4. Przesuń węzeł sumacyjny. Narysuj równoważny schemat.
.
„
Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
51
5. W wyniku przekształceń otrzymano transmitancję układu w postaci:
x y
Narysuj schemat pierwotny układu.
6. Organ pomiarowy stanowi część:
a) regulatora,
b) obiektu,
c) elementu wykonawczego,
d) układu regulacji automatycznej.
7. Organ wykonawczy nie składa się z:
a) wzmacniacza mocy,
b) urządzenia pomiarowego,
c) elementu napędowego,
d) elementu nastawczego.
8. Samosmarowność jest cechą charakterystyczną urządzeń:
a) hydraulicznych,
b) pneumatycznych,
c) elektrycznych,
d) elektropneumatycznych.
9. W warunkach występowania niskich temperatur, najkorzystniej jest stosować urządzenia:
a) elektryczne,
b) hydrauliczne,
c) pneumatyczne,
d) elektrohydrauliczne.
10. Standardowy sygnał pneumatyczny zawarty jest w granicach:
a) 0,1 ÷ 10 atm,
b) 20 ÷ 50 kPa,
c) 20 ÷ 100 kPa,
d) 0,01 ÷ 1 atm.
11. Wykrycie przerw w linii transmisyjnej umożliwiają sygnały standardowe:
a) napięciowe: - 5 ÷ + 5 V,
b) prądowe: 0 ÷ 20 mA,
c) napięciowe: 0 ÷ 5 V,
d) prądowe: 4 ÷ 20 mA.
12. Symbol jak na rys. przedstawia:
a) miernik analogowy,
b) siłownik z silnikiem elektrycznym prądu stałego,
c) sterownik,
d) urządzenie sterujące.
)
s
(
K
)
s
(
K
1
)
s
(
K
r
o
o
+
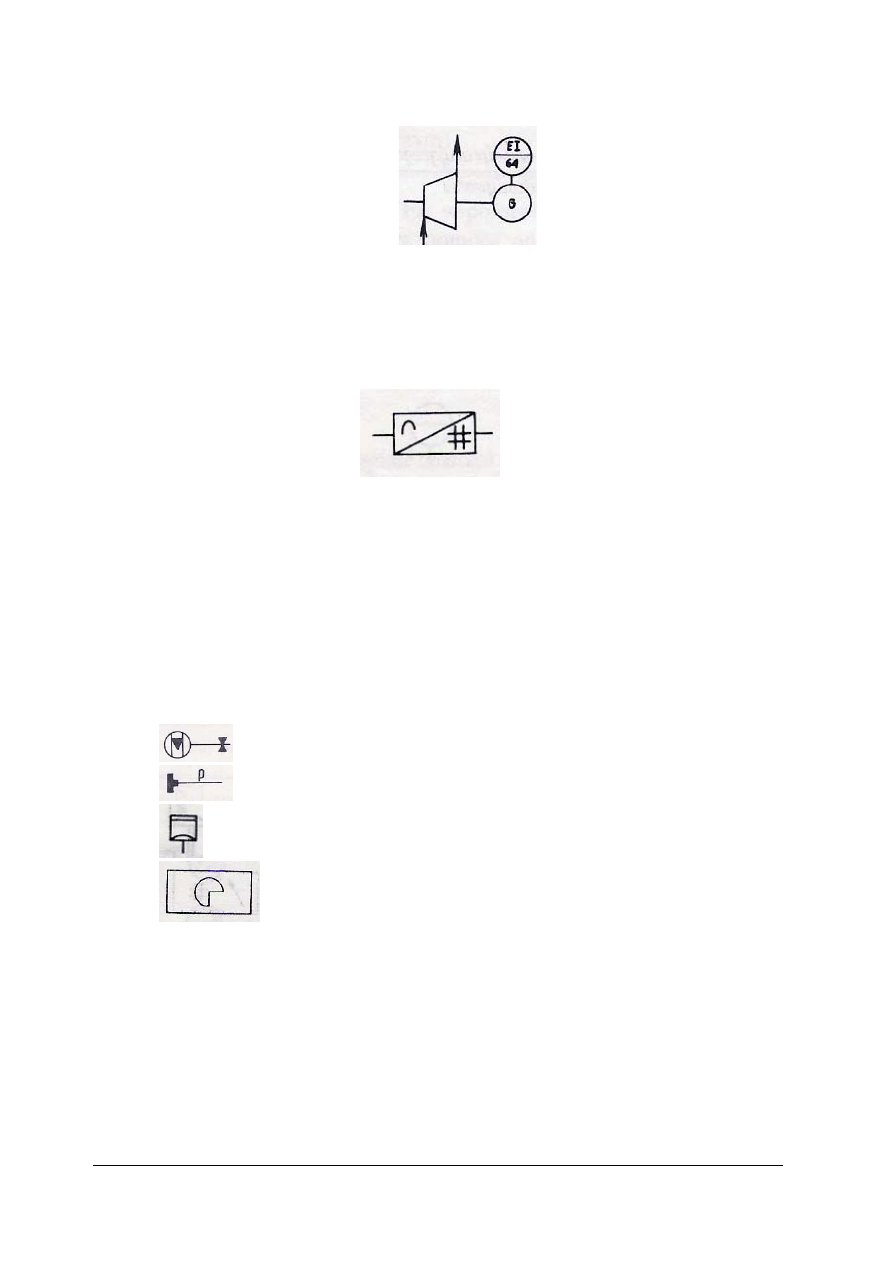
„
Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
52
13. Rysunek przedstawia:
a) układ ze zdalnym wskazaniem pomiaru napięcia elektrycznego wytwarzanego przez
prądnicę,
b) układ pomiaru poziomu i sygnalizację odchyłki,
c) sygnalizator optyczny i akustyczny,
d) układ pomiaru ze zdalną rejestracją wielkości mierzonej.
14. Na rys. przedstawiono przetwornik:
a) sygnału wejściowego elektrycznego analogowego na sygnał wyjściowy elektryczny
cyfrowy,
b) sygnału wejściowego elektrycznego analogowego na sygnał wyjściowy pneumatyczny,
c) sygnału wejściowego elektrycznego cyfrowego na sygnał wyjściowy elektryczny
analogowy,
d) sygnału wejściowego elektrycznego cyfrowego na sygnał wyjściowy elektryczny
cyfrowy binarny.
15. Odczytaj zapis: ŁR +, Z ±, SL ++, S + (silnik rusza).
16. Rotametr z sygnalizacją odchylenia od najmniejszej i od największej wartości przedstawiono
na rysunku::
a)
,
b)
,
c)
,
d)
.
17. Hamowanie odzyskowe wymaga:
a) włączenia w obwód twornika rezystora dodatkowego,
b) włączenia w obwód stojana rezystora dodatkowego,
c) włączenia w obwód twornika i stojana rezystora dodatkowego,
d) nie wymaga włączenia rezystora dodatkowego.
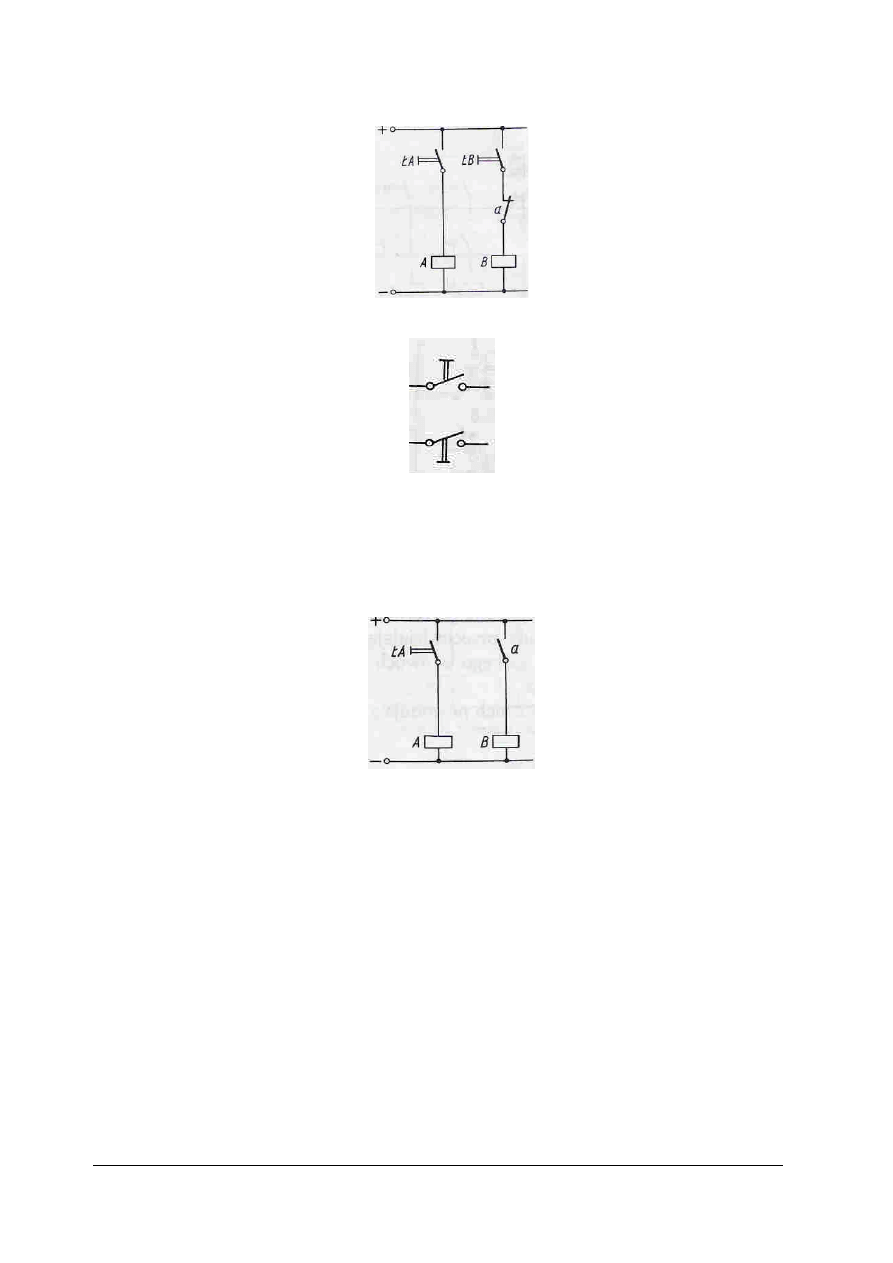
„
Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
53
18. Narysuj diagram czasowy blokady wykluczającej (jak na rys.).
19. Na rysunku przedstawiono:
a) łącznik o jednym zestyku o napędzie ręcznym: oba wciskane,
b) łącznik o jednym zestyku o napędzie ręcznym: oba wyciskane,
c) łącznik samoczynny,
d) łącznik o jednym zestyku zwiernym o napędzie ręcznym: wciskany, wyciągany.
20. Zastąp układ jak na rys. elementami cyfrowymi.
„
Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
54
KARTA ODPOWIEDZI
Imię i nazwisko ……………………………………………………..
Montowanie i testowanie połączeń układów automatyki
Zakreśl poprawną odpowiedź, wpisz brakujące części zdania lub wykonaj rysunek.
Odpowiedź
Nr
zadania
a b c d
Punkty
1
2 a
b
c
d
3 a
b
c
d
4
5
6 a
b
c
d
7 a
b
c
d
8 a
b
c
d
9 a
b
c
d
10 a
b
c
d
11 a
b
c
d
12 a
b
c
d
13 a
b
c
d
14 a
b
c
d
15
16 a
b
c
d
17 a
b
c
d
18
19 a
b
c
d
20
RAZEM
„
Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
55
6. LITERATURA
1. Amborski K., Marusak A.: Teoria sterowania w ćwiczeniach. PWN, Warszawa, 1978
2. Barlik R., Nowak M.: Układy sterowania i regulacji urządzeń energoelektronicznych. WSiP,
Warszawa 1998
3. Findeisen Wł. (red): Poradnik inżyniera automatyka. WNT, Warszawa 1973
4. Gerlach M., Janas R.: Automatyka dla liceum technicznego. WSiP, Warszawa 1999
5. Gessing R.: Podstawy automatyki. Wydawnictwo Politechniki Śląskiej, Gliwice 2001
6. Hörnemann E., Hübscher H., Klaue J., Schierack K., Stolzenburg R.: Elektrotechnika.
Instalacje elektryczne i elektronika przemysłowa. WSiP, Warszawa 1998
7. Januszewski S.,Pytlak A., Rosnowska-Nowaczyk M., Świątek H.: Energoelektronika. WSiP,
Warszawa 2004
8. Kacejko L.: Pracownia elektryczna. Tom II. Maszyny, urządzenia i napęd. Wydawnictwo
MCNEMT, Radom 1993
9. Kojtych. A., Szawłowski M., Szymczyk W.: Pracownia techniczna 1.Pomiary wielkości
fizycznych. WSiP, Warszawa 1998
10. Komor Z.: Pracownia automatyki. WSiP, Warszawa 1996
11. Kordowicz-Sot A.: Automatyka i robotyka. Robotyka. WSiP, Warszawa 1999
12. Kordowicz-Sot A.: Automatyka i robotyka. Układy regulacji automatycznej. WSiP, Warszawa
1999
13. Kostro J.: Elementy, urządzenia i układy automatyki. WSiP, Warszawa 1998
14. Kostro J.: Pracownia automatyki. WSiP, Warszawa 1996
15. Kuźnik J.: Regulatory i układy regulacji. Wydawnictwo Politechniki Śląskiej, Gliwice 2006
16. Płoszajski G.: Automatyka. WSiP, Warszawa 1995
17. Pochopień B.: Automatyzacja procesów przemysłowych. WSiP, Warszawa 1993
18. Pułaczewski J.: Podstawy regulacji automatycznej. WSiP, Warszawa 1988
19. Siemieniako F., Gawrysiak M.: Automatyka i robotyka. WSiP, Warszawa 1993
20. Technika sterowników z programowalna pamięcią. Praca zbiorowa. WSiP, Warszawa 1998
21. Technika sterowników z programowalna pamięcią. Ćwiczenia. WSiP, Warszawa 1998
22. Węgrzyn S.: Podstawy automatyki. PWN, Warszawa 1978
Wyszukiwarka
Podobne podstrony:
Instalowanie urządzeń automatyki i obsługa prostych układów automatycznej regulacji
3 Projektowanie układów automatyki (schematy blokowe, charakterystyki)
Wykład 6 Stabilność liniowych układów automatyki (2013)
Stabilność układów automatyki
01 Wprowadzenie do układów automatycznego sterowania
Badanie stabilności układów automatyki – symulacja komputerowa
Projektowanie układów automatyki- simulink, Automatyka
1.1.7 Testowanie połączeń przy użyciu polecenia ping, 1.1 Nawiązywanie połączenia z Internetem
15 Wykonywanie obsługi i konserwacji układów automatyki
Projektowanie układów automatyki – MATLAB
Wykład 4 Klasyfikacja i podział elementów układów automatyki (2013)
2 Modelowanie układów automatyki (silnik elektryczny prądu stałego z magnesem trwałym)
Automatyka- Badanie układów automatyki z wykorzystaniem programu Mathlab
14 Stosowanie ukladow automatyk Nieznany
17 Stosowanie ukladow automatyk Nieznany (2)
więcej podobnych podstron