DYNAMIKA - DYNAMIKA PUNKTU MATERIALNEGO
1.
D-1 – Równania różniczkowe ruchu punktu materialnego
Zad. 1.1
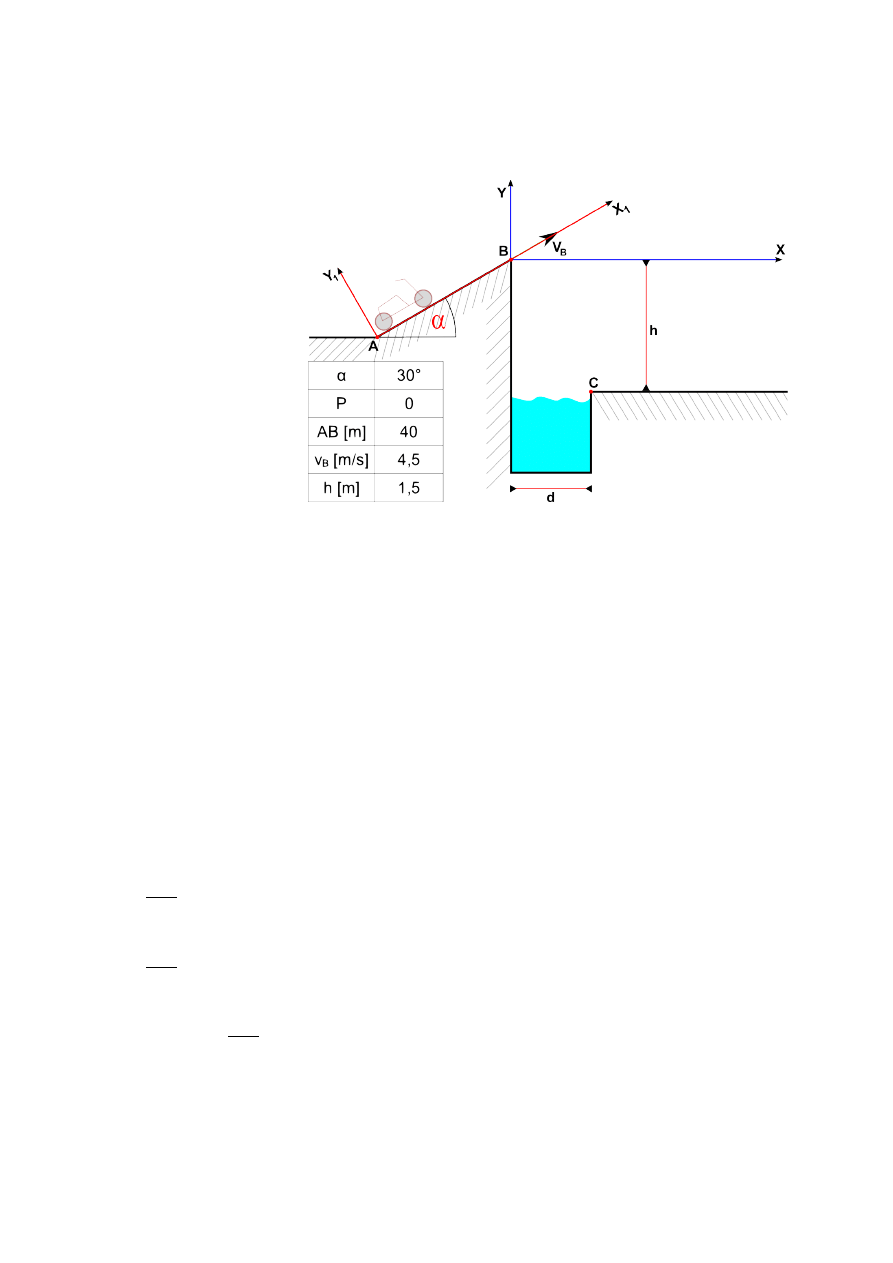
Motocyklista porusza się po
płaszczyźnie AB nachylonej do
poziomu pod kątem α. W
punkcie B osiągając prędkość
v
B
opuszcza płaszczyznę AB i
spada ponad kanałem w
punkcie C na poziomą
płaszczyznę. Siła P działająca
na motocykl jest stała na
całym odcinku AB. Oblicz
prędkość w punkcie A a także
odległość d na jaką
maksymalnie dolecieć może
motocyklista tak aby uniknąć
upadku do kanału. Opory
toczne oraz opory powietrza
pominąć, motocykl
potraktować jako punkt
materialny.
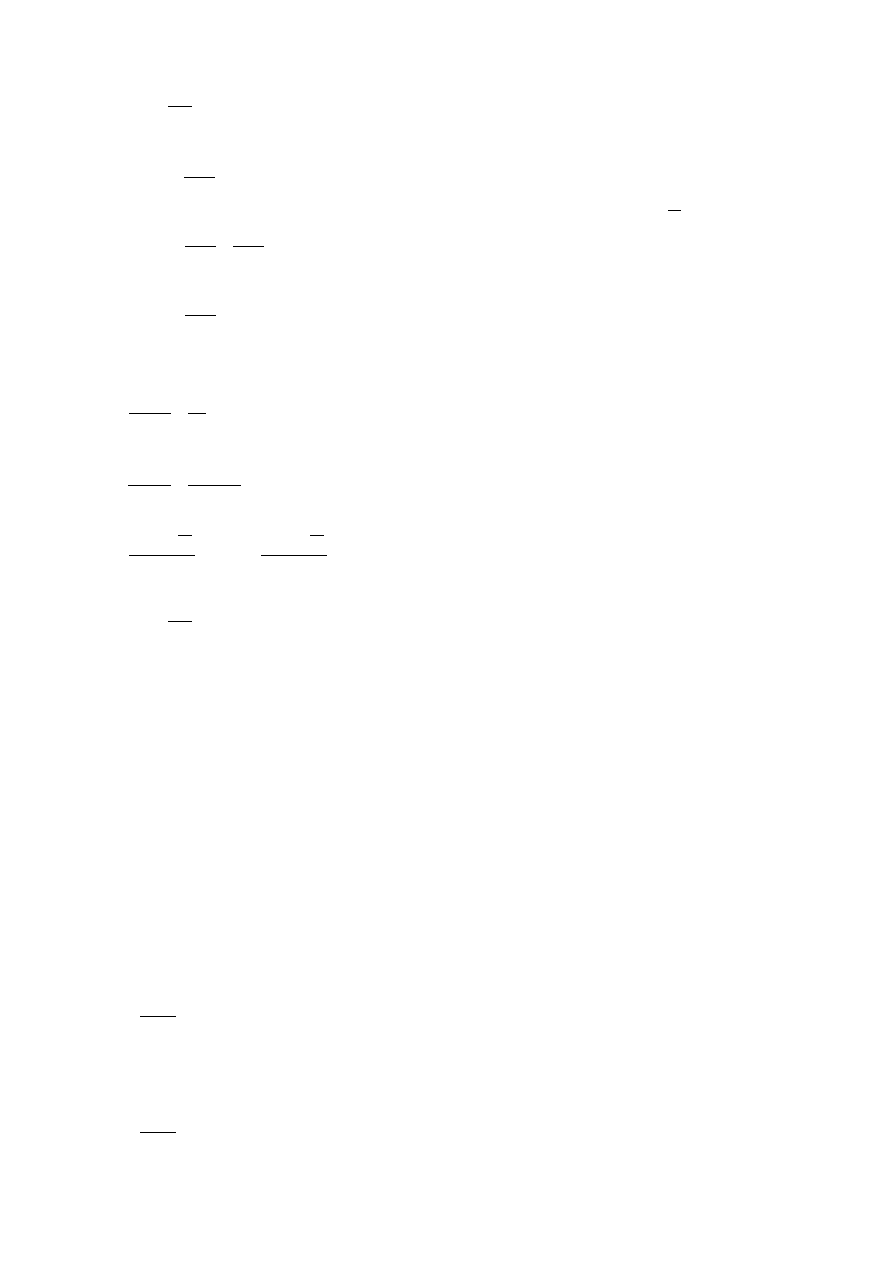
Aby rozwiązać zadanie należy sformułować równanie dynamiczne w każdym podukładzie tj. w x
1
y
1
oraz w xy.
W pierwszym układzie równanie dynamiczne przyjmie postać, którą kolejno całkując po czasie i wyliczając
stałe C1 i C2 z warunków początkowych zadania doprowadzimy do postaci pozwalającej policzyć czas ruchu
na odcinku AB a następnie prędkość w punkcie A.
m ¨
x
1
=−
G sin
¨
x
1
=−
g sin
˙
x
1
=−
g t sinC
1
gdzie dla t =0 ˙
x
1
=
v
A
, więc C
1
=
v
A
˙
x
1
=−
g t sinv
A
gdzie ¨
x
1
=
v
B
zatem v
B
=−
g t sinv
A
x
1
=−
g t
2
2
sinv
A
tC
2
gdzie dla t=0 x
1
=
0, więc C
2
=
0
x
1
=−
g t
2
2
sinv
A
t gdzie x
1
=
AB
zatem
AB=−g t
2
2
sinv
A
t
W tym momencie mamy dwa równania, które wiążą czas, jeśli dokonamy podstawienia:
v
A
=
v
B
g t
2
AB=v
a
t−gt
2
4
AB=v
B
tg t
2
2
−
g t
2
4
AB=v
B
t
g t
2
4
w podstawieniu tym dokonano zamiany wielkości
sin=
1
2
W dalszym ciągu obliczeń wyliczamy czas t, w którym motocyklista pokonuje odcinek AB:
t
2
4v
B
t
g
−
4l
g
=
0
=
16v
B
2
g
2
−
16
AB
g
t
1
=
−
b−
2a
t
2
=
−
b
2a
v
A
=
v
B
g t
2
obliczeń nie wrzuciłem już do pliku niemniej jednak przeprowadziłem je i tego także będę wymagał na
kolokwium.
W drugiej części zadania obliczamy maksymalną szerokość kanału jaką motocykliście uda sie przelecieć tak
by bezpiecznie wylądować na drugim brzegu. Należy zatem sformułować drugie równanie dynamiczne. Pod
uwagę należy wziąć fakt, iż jedyna działającą siłą jest siła grawitacji. Czas w tej części zadania będziemy
zapisywać za pomocą T, by uniknąć błędnych skojarzeń z częścią pierwszą zadania. Oba liczone czasy
stanowią odrębne wielkości. W momencie gdy motocyklista opuszcza skarpę i rozpoczyna lot nad kanałem
czas T jest liczony od 0 (zera) do wartości T
K
kiedy motocyklista wyląduje:
m ¨y=−G
¨
y=−g
˙
y=−gT C
3
˙
y ma wymiar prędkości , zatem ˙y=v
B
sin ,
dla T=0 C
3
=
v
B
sin
y=−gT
2
2
v
B
T sinC
4
y ma wymiar drogi , zatem y=0
dla T=0 C
4
=
0
y=−
gT
2
2
v
B
T sin

W chwili lądowania motocyklisty przy założonym układzie odniesienia y = -h co należy zapisać jako :
−
h=−
gT
2
2
v
B
T sin
gT
2
2
−
v
B
T sin−h=0
T
2
−
2 v
B
T sin
g
−
2h
g
=
0
po zamianie sin=1
2
T
2
−
v
B
T
g
−
2h
g
=
0
Podobnie jak ostatnio obliczamy pierwiastki równania kwadratowego, znajdujemy czas (musi być większy od
zera). Po znalezieniu czasu możemy odnaleźć szerokość kanału d, która wynosić będzie:
v
Bx
=
v
B
cos
d=v
Bx
T
Zad. 1.2
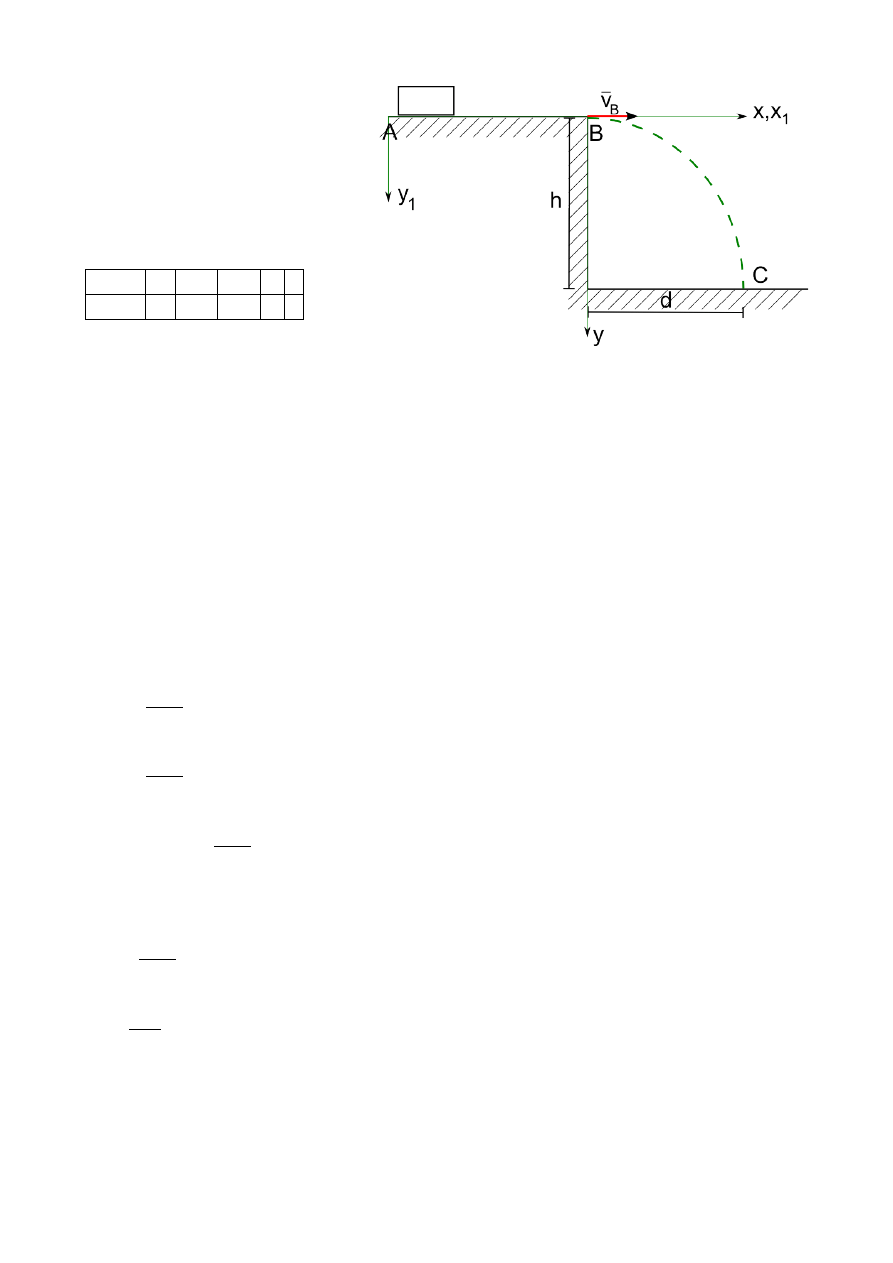
Ciało porusza sie na poziomym odcinku
AB o długości k w czasie t s.
Współczynnik tarcia posuwistego
wynosi f. Ciało opuszcza płaszczyznę w
punkcie B z prędkością v
B
i osiągą w
punkcie C prędkość v
C
przebywając w
powietrzu T s. W rozwiązaniu ciało
przyjąć za punkt materialny a opory
powietrza ominąć.
v
A
[m/s]
f
k [m] h [m]
v
C
d
7
0,2
8
20
? ?
Przy powyższych danych i szukanych budujemy równania dynamiczne najpierw dla układu x
1
y
1
a następnie
dla xy.
m ¨
x
1
=−
T T =fN N=G T=fG
m ¨
x
1
=−
fmg
¨
x
1
=−
fg
˙
x
1
=−
fgtC
1
gdzie dla t =0 ˙
x
1
=
v
A
, więc C
1
=
v
A
˙
x
1
=−
fgtv
A
gdzie ¨
x
1
=
v
B
zatem v
B
=−
fgtv
A
x
1
=−
fgt
2
2
v
A
tC
2
gdzie dla t=0 x
1
=
0, więc C
2
=
0
x
1
=−
fgt
2
2
v
A
t gdzie x
1
=
k
zatem k =−fg t
2
2
v
A
t
W zadanych warunkach zadania znane jest nam k oraz v
A
więc z ostatniego równania policzyć możemy czas t
w jakim ciało pokonuje odcinek AB = k:
k=−
fgt
2
2
v
A
t
t
2
−
2v
A
fg
tk =0
Analogicznie jak w poprzednim zadaniu wyszukujemy pierwiastków równania i znajdujemy czas t. Jeśli
wyznaczymy czas wtedy bez problemu możemy wyliczyć prędkość v
B
:
v
B
=−
fgtv
A

Po wyliczeniu prędkości v
B
możemy przystąpić do drugiej części zadania gdzie przy pomocy drugiego
równania dynamicznego obliczymy żądane wielkości d i v
C
. Jedyną działającą siłą jest siła grawitacji, możemy
zatem zbudować równanie dynamiczne i odpowiednio całkując je po czasie będziemy w stanie wyliczyć pr
m ¨y=G
¨
y=g
˙
y=g T C
3
˙
y ma wymiar prędkości , dla T=0 ˙y=0 zatem C
3
=
0 ,
y=g T
2
2
C
4
y ma wymiar drogi , dla T =0 y=0 więc C
4
=
0
y=
g T
2
2
Dla szukanego czasu T, y = h, więc równanie przybierze postać:
h=
g T
2
2
T=
2h
g
Po obliczeniu czasu T, będziemy mogli obliczyć odległość d. Jest to odległość na jaką przemieści się w czaie T
ciało przemieszczające się ze stałą prędkością v
B
:
d=v
B
T
2.
D-4 – Całkowanie równań dynamicznych ruchu punktu materialnego w ruchu względnym
Rozwiązywanie równania różniczkowego liniowego niejednorodnego jest sumą rozwiązania ogólnego
równania różniczkowego jednorodnego i rozwiązania szczególnego równania różniczkowego niejednorodnego.
1. Metoda uzmiennania stałej
1.1.
znajdujemy całkę ogólną
dy
dx
px y=q x
dy
dx
px y=0
dy
y
=−
p xdx
∫
dy
y
=−
∫
p xdx
ln
∣
y
∣
=−
∫
pxdx
y=Ce
−
∫
p xdx
1.2.
uzmiennianie stałej
C=C x
y=Ce
−
∫
p xdx
1.3.
różniczkujemy względem x
y
,
=
C
,
xe
−
∫
p x dx
C xe
−
∫
px dx
−
p x
1.4.
podstawiamy do równania
dy
dx
px y=q x y
,
px y=q x
C
,
xe
−
∫
p xdx
C xe
−
∫
p xdx
−
pxp x C xe
−
∫
p xdx
=
q x
C
,
xe
−
∫
p xdx
=
q x
C
,
x=q xe
∫
p xdx
dC x
dx
=
q xe
∫
p xdx
C x=
∫
q xe
∫
px dx
dx
1.5.
uzyskane C(x) wstawiamy do
y=C xe
−
∫
p x dx
ROZWIĄZANIE KOŃCOWE:
y
k
=
y y
1
y
k
=
C xe
−
∫
px dx
e
−
∫
px dx
∗
∫
q xe
∫
px dx
dx
y
1
=
e
∫
p xdx
∗
∫
q xe
∫
p xdx
dx całka szczególna
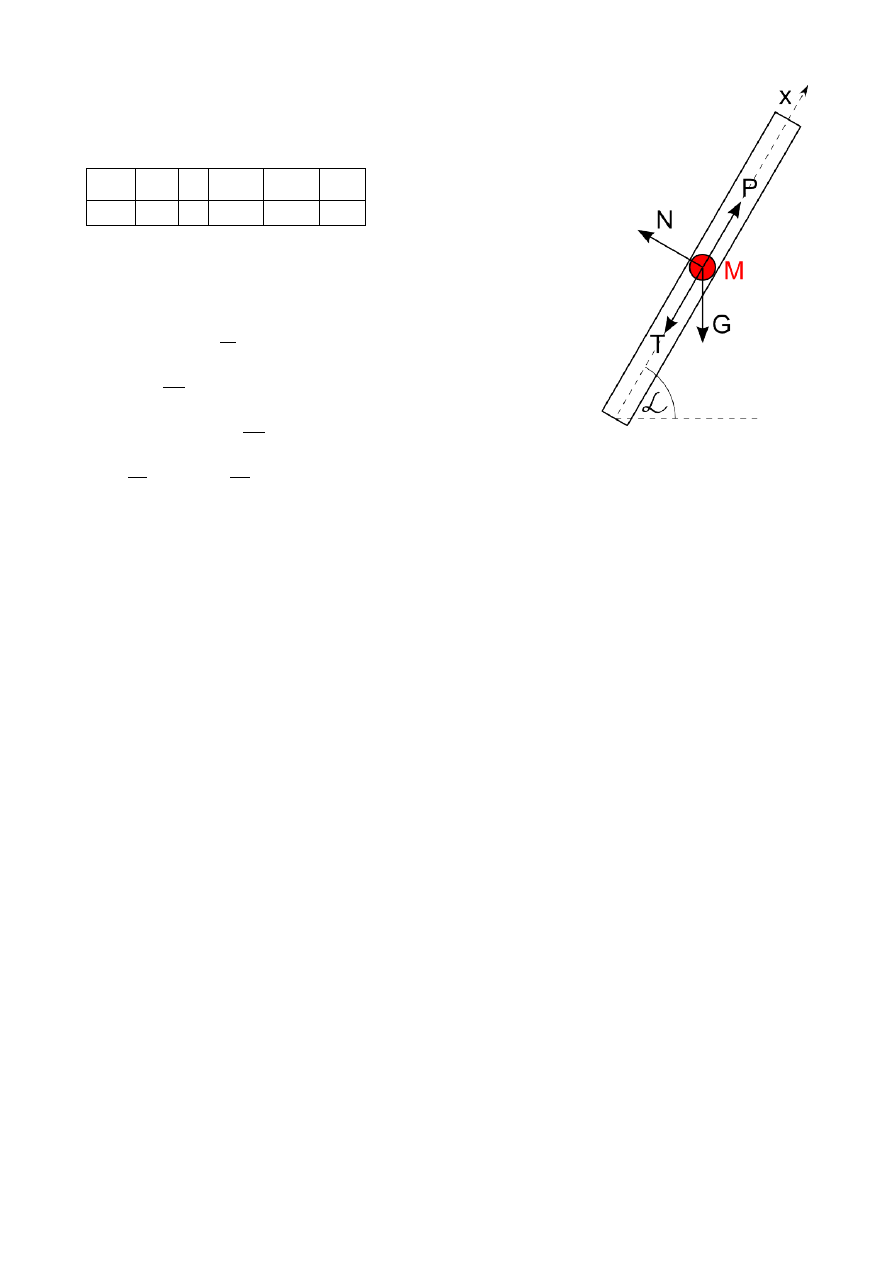
Zad. 2.1 – Ciastoń D2-2
Znaleźć równania ruchu ciała M o masie m, przyjmując je za punkt
materialny znajdujący się pod działaniem siły zmiennej siły P.
m [kg] P [N]
f
x
0
˙
x
0
0,25
100 0,3
0,03
0,5
60
Dla układu budujemy równanie dynamiczne:
X : m ¨x=P−G sin−T
Y : 0=N−G cos
N=Gcos 60
o
=
G
2
T=fN=
fG
2
m ¨x=P−G sin−
fG
2
¨
x=
P
m
−
g sin−
fg
2
¨
x=400x−8,49−1,47
¨
x=400x−9,69
Następnie dokonujemy podstawienia:
x=a
˙
x=0
¨
x=0
¨
x=400x−9,69
0=400a−9,96
a=0,0249
¨
x−400x=0
¨
x=400x
x=e
rt
˙
x=r e
rt
¨
x=r
2
e
rt
r
2
e
rt
=
400e
rt
r
2
=
400
r=20 lub r=−20
x=C
1
e
20t
C
2
e
−
20t
rozwiązanie ostateczne x=C
1
e
20t
C
2
e
−
20t
0,0249
Ostatecznie stałe C
1
oraz C
2
wyliczamy z warunków początkowych obliczając kolejne pochodne w rozwiązania
ostatecznego.
Wyszukiwarka
Podobne podstrony:
manual mechanika 2 2 id 279133 Nieznany
manual mechanika 2 2 id 279133 Nieznany
407 B3EG2KK1 Demontaz montaz Mechanizm kierowniczy Nieznany
G LOC manual id 185363 Nieznany
instrukcja bhp mechanik samocho Nieznany
manual mechanika 2 2 B5HKZKNRV2DBZPSPLTUJWZNM452D7AATPRLAQ3A
manual id 190121 Nieznany
1 mechanikaid 8576 Nieznany (2)
BMW CARSOFT 65 Manual id 90747 Nieznany (2)
hawrysz, mechanika gruntow L, o Nieznany
8 modelowanie mechaniczne wybr Nieznany
11 Fale mechaniczneid 12412 Nieznany
03 Sprawozdanie mechaniczne do Nieznany
407 B3EG2KK1 Demontaz montaz Mechanizm kierowniczy Nieznany
C5 (X7) D6AY01KAP0 9 23 07 2013 Pomoc w diagnostyce Manualna (mechaniczna) skrzynia biegów i sp
manual mechanika 2 2
więcej podobnych podstron