07 Momenty, hipoteza
98
MOMENTY BEZWŁADNOŚCI
FIGUR PŁASKICH
Przekroje poprzeczne prętów, wałów i belek – figury płaskie,
charakteryzujące się następującymi parametrami:
– polem powierzchni przekroju
[mm
2
, cm
2
, m
2
],
–
położeniem środka ciężkości przekroju,
– momentami statycznymi
[cm
3
, m
3
],
–
momentami bezwładności
[cm
4
, m
4
].
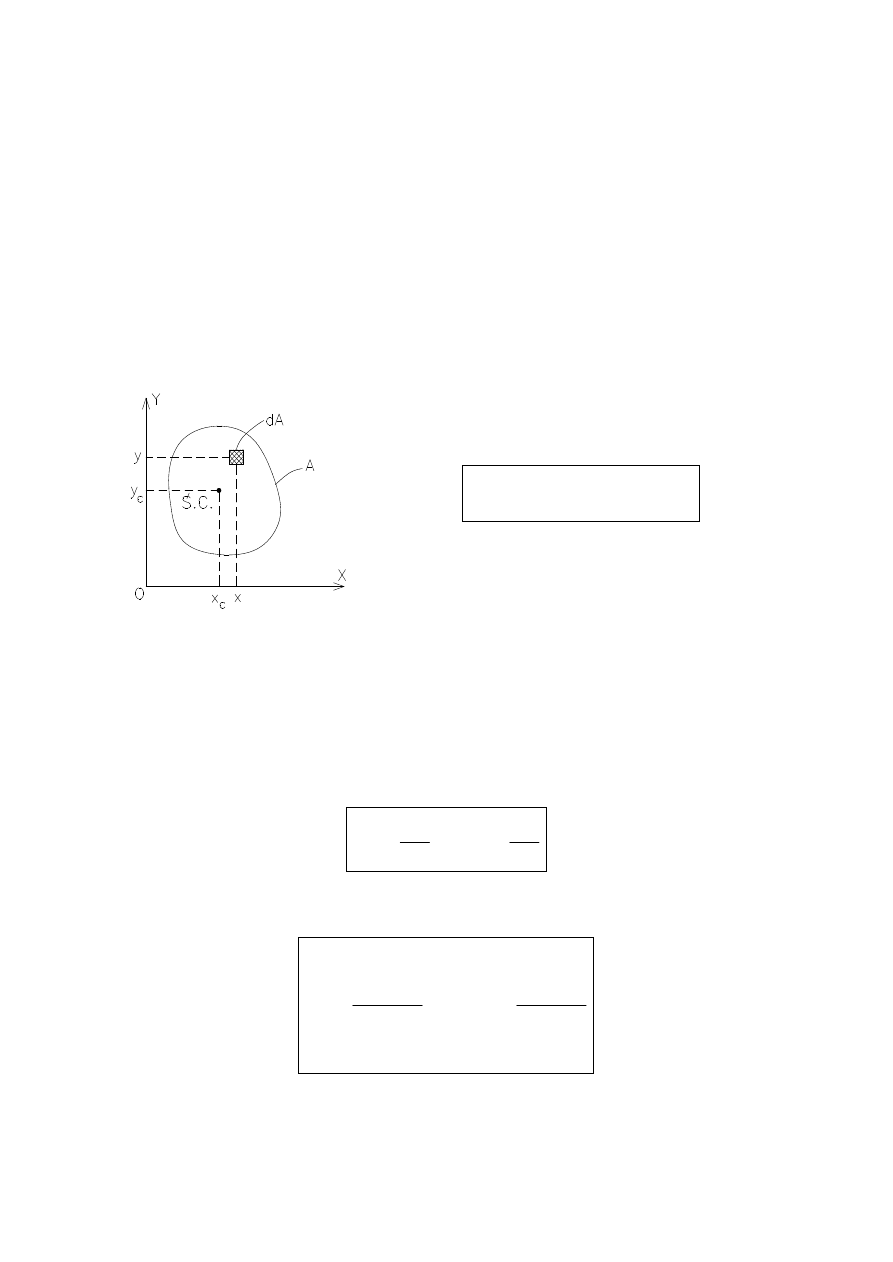
Definicja momentu statycznego w w
układzie osi X i Y:
A
A
y
x
xdA
S
,
ydA
S
W zależności od położenia przekro-
ju względem osi układu współrzęd-
nych
mogą przyjmować wartości
dodatnie i ujemne.
Wykorzystując znane ze statyki pojęcie środka sił, dla środka
ciężkości można napisać:
.
A
x
S
,
A
y
S
c
y
c
x
Korzystając z tych zależności, współrzędne środka ciężkości
figury płaskiej można obliczyć ze wzoru:
.
A
S
y
,
A
S
x
x
c
y
c
Środek ciężkości przekrojów złożonych –podział przekroju na
figury proste.
,
A
y
A
y
,
A
x
A
x
n
1
i
i
n
1
i
i
i
c
n
1
i
i
n
1
i
i
i
c
A
i
– pola powierzchni figur prostych, x
i
, y
i
–
współrzędne środ-
ków ciężkości poszczególnych figur prostych.
Definicja momentu statycznego
07 Momenty, hipoteza
99
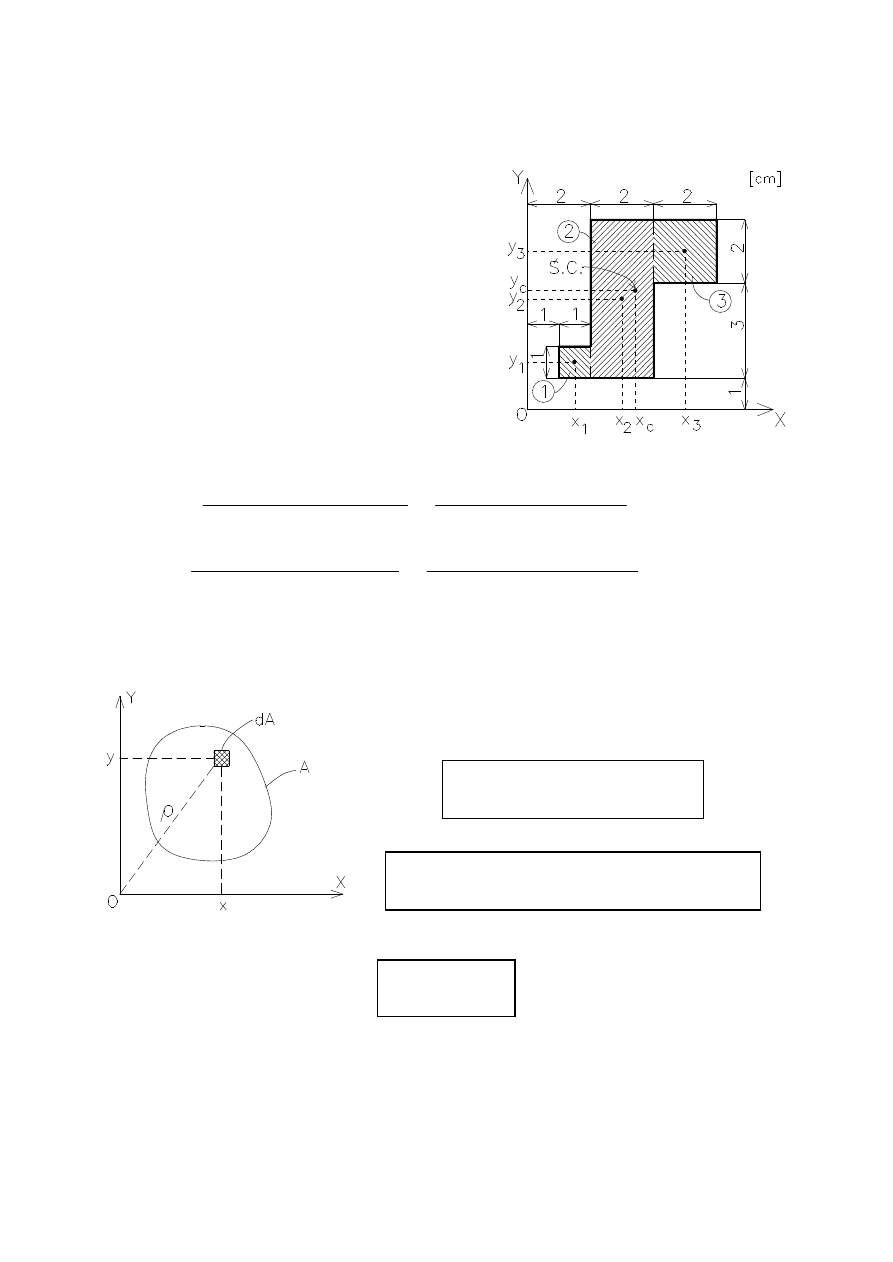
P
RZYKŁAD
Określić położenie środka ciężkości fi-
gury przedstawionej na rysunku.
Przekrój po
dzielono na trzy prostokąty
o następujących polach powierzchni:
A
1
= 1 1 = 1 cm
2
,
A
2
= 2 5 = 10 cm
2
,
A
3
= 2 2 = 4 cm
2
.
Współrzędne środka ciężkości całej figu-
ry wyno
szą
,
cm
43
,
3
4
10
1
5
4
3
10
5
,
1
1
A
A
A
x
A
x
A
x
A
x
3
2
1
3
3
2
2
1
1
c
.
cm
77
,
3
4
10
1
5
4
5
,
3
10
5
,
1
1
A
A
A
y
A
y
A
y
A
y
3
2
1
3
3
2
2
1
1
c
Momenty bezwładności
Definicja
momentów bezwładności:
–
osiowe momenty bezwładności
A
2
y
A
2
x
,
dA
x
J
,
dA
y
J
–
biegunowy moment bezwładności
,
J
J
dA
y
x
dA
J
y
x
A
A
2
2
2
0
–
moment dewiacyjny (zboczenia, odśrodkowy)
A
xy
.
xydA
J
Momenty osiowe oraz m
oment biegunowy są
zawsze dodatnie, natomiast
moment dewiacyjny może być dodatni lub ujemny.
07 Momenty, hipoteza
100
Momenty bezwładności figur złożonych są sumą momentów
bezwładności prostych figur składowych. Figura złożona może
składać się z figur „pełnych” oraz „pustych”. Przy sumowaniu
momentów bezwładności figury „puste” uważa się za figury z
ujemnymi polami powierzchni.
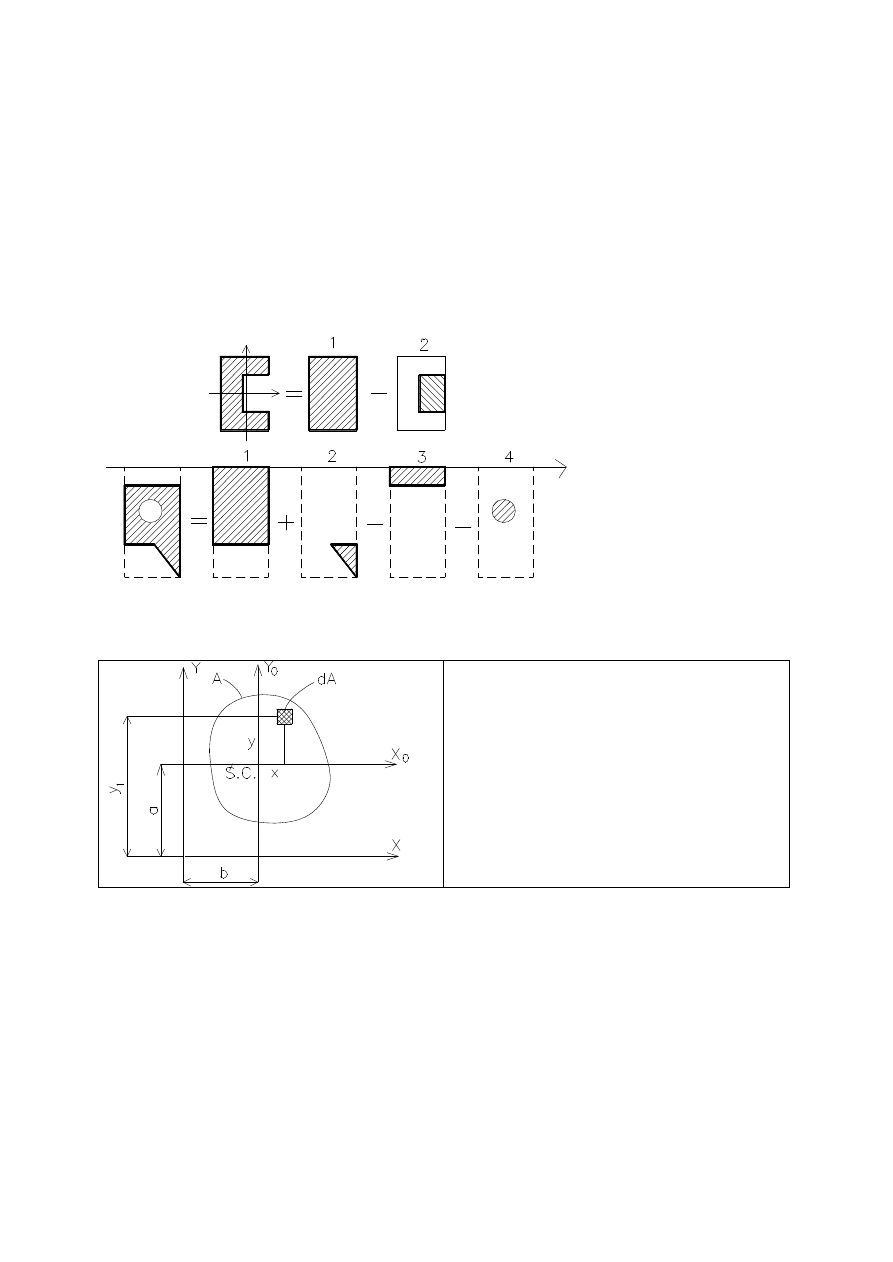
P
RZYKŁAD
Figury złożone przedstawione na rysunku podzielić na figury proste.
Podział
figury złożonej
na figury proste
(
jeden z możliwych
do zastosowania
podziałów figury).
Twierdzenie Steinera
Twierdzenie Steinera umożli-
wia obliczanie momentów bez-
władności
figur
płaskich
względem
osi
równolegle
przesuni
ętych w stosunku do
osi centralnych (osi przecho-
dzących przez środek ciężko-
ści przekroju).
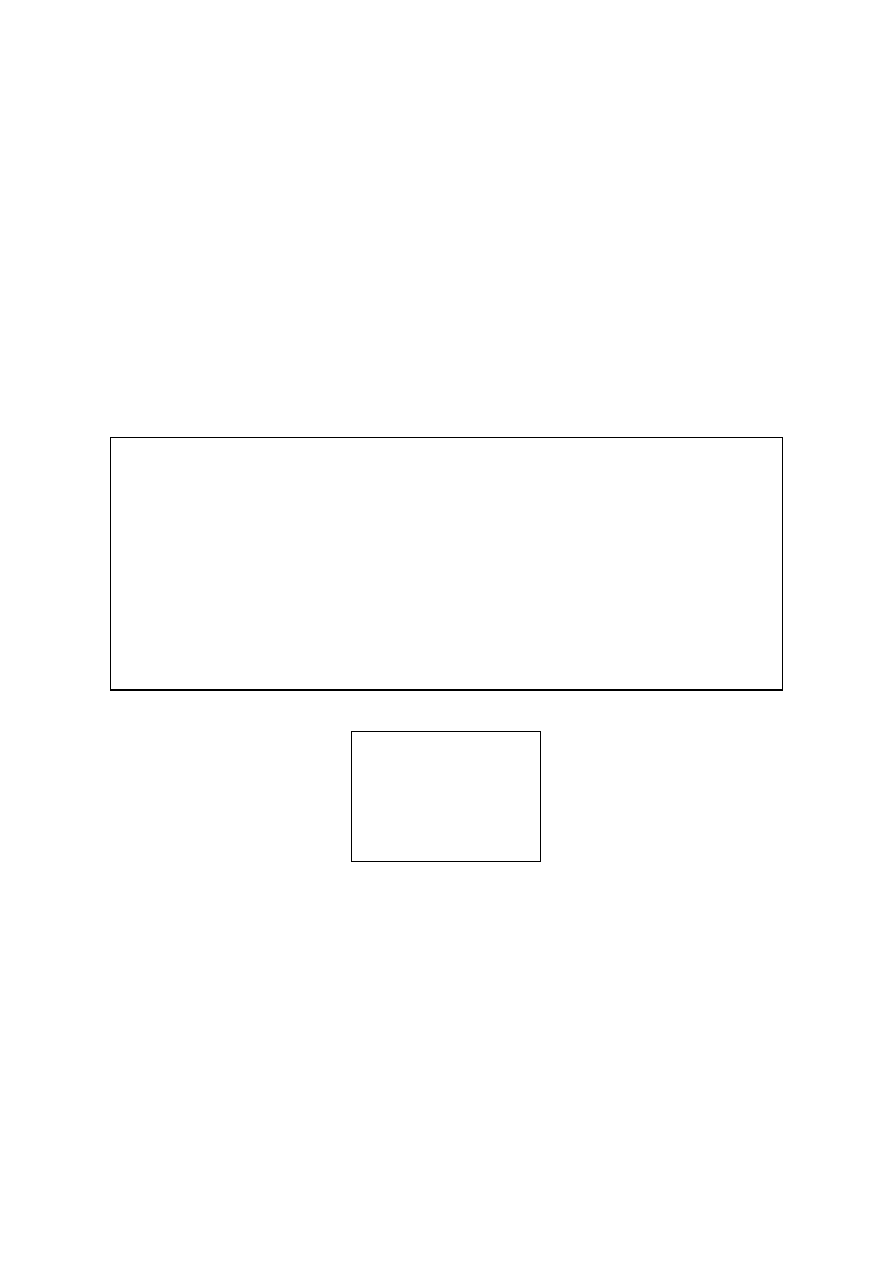
Dla figury
płaskiej o powierzchni A, obliczyć momenty bez-
władności względem osi X–Y, równolegle przesuniętych w sto-
sunku do osi centralnych (środkowych) X
0
–Y
0
o odcinki a i b.
Na podstawie definicji momentu bezwładności moment osio-
wy względem osi X dla y
1
= y + a wyraża wzór:
A
A
A
A
2
x
A
2
2
2
1
x
.
Aa
J
dA
a
ydA
a
2
dA
y
dA
a
y
dA
y
J
0
07 Momenty, hipoteza
101
W powyższym równaniu całka
A
ydA
opisuje moment statycz-
ny, który względem osi centralnych jest równy zeru. W podobny
sposób określa się moment względem osi Y oraz moment de-
wiacyjny
A
y
x
xy
A
2
x
2
y
.
Aab
J
dA
b
x
a
x
J
,
Ab
J
dA
b
x
J
0
0
0
Wyprowadzone wyżej zależności noszą nazwę twierdzenia
Steinera.
Osiowy moment bezwładności figury płaskiej względem osi
równoległej odległej od środka ciężkości o określoną wartość
jest równy momentowi względem osi równoległej przechodzą-
cej przez środek ciężkości figury, powiększonemu o iloczyn
powierzchni figury i kwadratu odległości między osiami.
Moment dewiacyjny figury płaskiej względem osi równolegle
przesuniętych jest równy momentowi dewiacyjnemu wzglę-
dem osi centralnych, powiększonemu o iloczyn powierzchni i
obu składowych równoległego przesunięcia.
Twierdzenie Steinera ma następująca postać matematyczną:
.
Aab
J
J
,
Ab
J
J
,
Aa
J
J
0
0
0
0
y
x
xy
2
y
y
2
x
x
07 Momenty, hipoteza
102
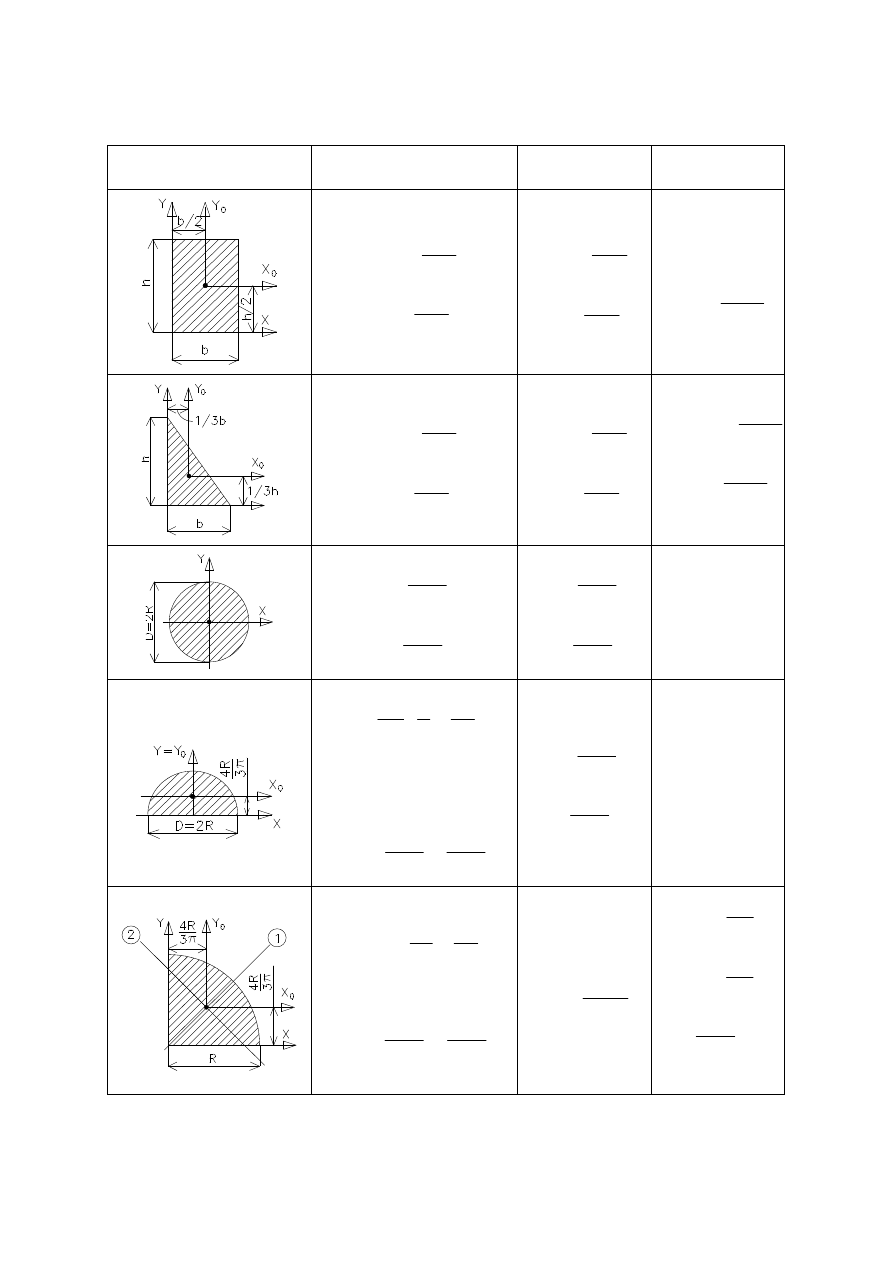
Momenty bezwładności figur prostych
Figura
J
x
J
y
J
xy
3
bh
J
12
bh
J
3
x
3
x
o
3
hb
J
12
hb
J
3
y
3
y
o
4
h
b
J
0
J
2
2
xy
y
x
o
o
12
bh
J
36
bh
J
3
x
3
x
o
12
hb
J
36
hb
J
3
x
3
x
o
24
h
b
J
72
h
b
J
2
2
xy
2
2
y
x
o
o
4
R
64
D
J
4
4
x
4
R
64
D
J
4
4
y
0
J
xy
8
R
128
D
J
R
1098
,
0
D
00686
,
0
9
8
8
16
D
J
4
4
x
4
4
4
x
o
8
R
128
D
J
4
4
y
0
J
0
J
o
o
y
x
xy
16
R
256
D
J
R
0549
,
0
9
4
16
R
J
4
4
x
4
4
x
o
16
R
J
4
x
4
4
4
y
x
4
xy
R
0165
,
0
9
R
4
8
R
J
8
R
J
0
o
07 Momenty, hipoteza
103
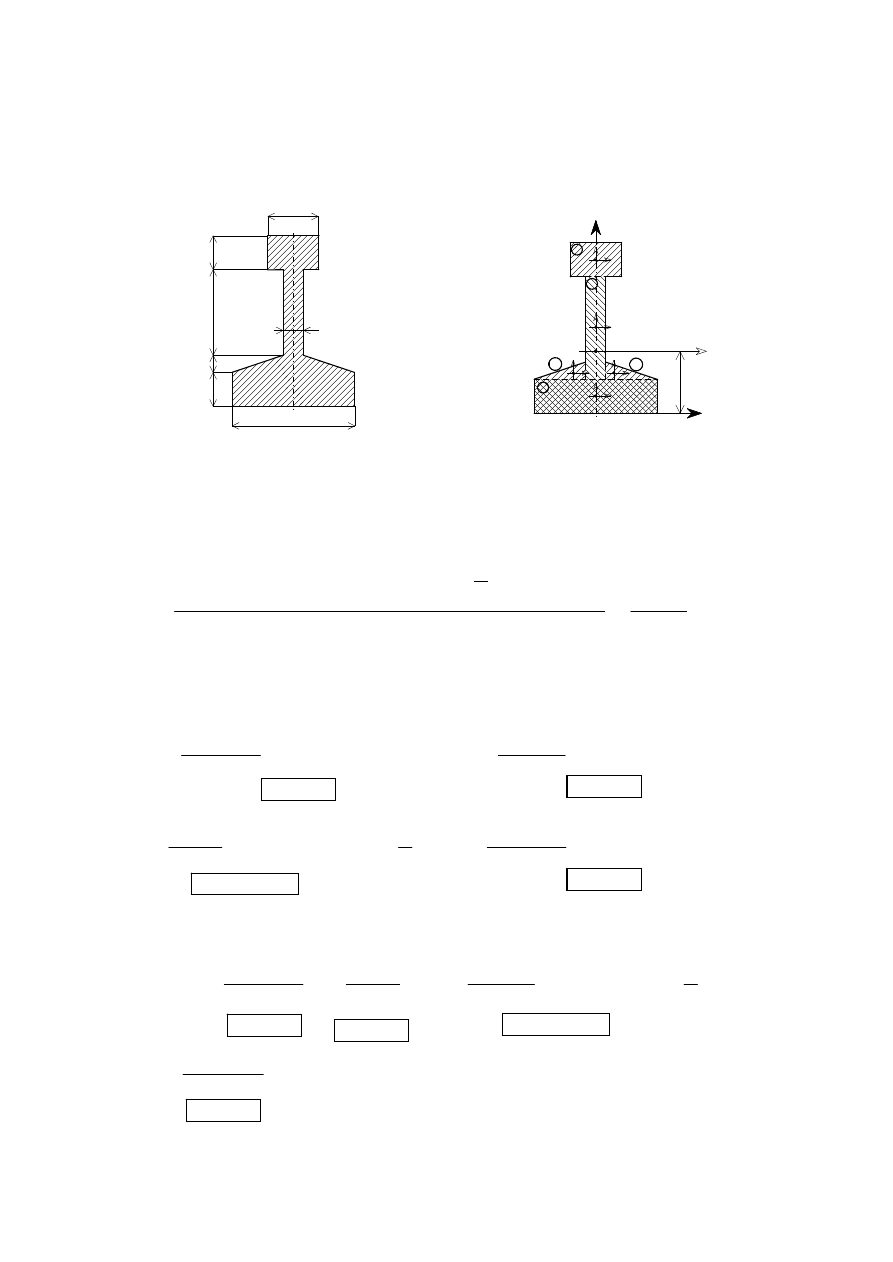
P
RZYKŁAD
Dla figury płaskiej pokazanej wyznaczyć wartości centralnych momen-
tów bez
władności.
2
t
5
t
7t
2
t
t
t
3t
1
2
4
3"
3'
X
X
X
X
X
X
Y
Y
Y
Y
Y
C
2
1
C
X
s
4
C
3
C'
3
C"
x
s
C
Y
Y
s
=
Figura złożona zostaje podzielona na figury proste. Korzystając ze
wzorów na wy
znaczanie środka ciężkości względem osi X-Y otrzymuje
się
.
0
x
,
t
62
,
3
t
29
t
105
t
14
t
5
,
1
2
t
6
t
6
t
t
14
t
3
1
2
t
5
,
1
2
t
5
t
6
t
9
t
6
y
s
2
3
2
2
2
2
2
2
2
2
s
Osiowe momenty bezwładności wynoszą
,
t
57
,
381
t
77
,
100
t
57
,
2
2
t
43
,
29
t
23
,
246
t
t
62
,
3
t
14
12
t
2
t
7
t
3
1
2
t
62
,
3
t
5
,
1
36
t
t
3
2
t
62
,
3
t
5
t
6
12
t
6
t
t
62
,
3
t
10
t
6
12
t
2
t
6
J
2
2
2
2
2
2
t
62
,
2
2
3
2
t
287
,
1
2
3
2
t
38
,
1
2
2
t
38
,
6
2
2
3
x
s
.
t
42
,
70
t
17
,
57
t
125
,
4
2
t
5
,
0
t
5
,
4
12
)
t
7
(
t
2
t
3
3
1
t
5
,
0
t
5
,
1
36
t
3
t
2
12
t
t
6
12
t
3
t
2
J
J
4
4
4
4
4
3
2
t
5
,
1
2
3
3
3
y
y
s
Figura 1
Figura 3’ i 3”
Figura 4
Figura 1
Figura 2
Figura 2
Figura 3’ i 3”
Figura 4
07 Momenty, hipoteza
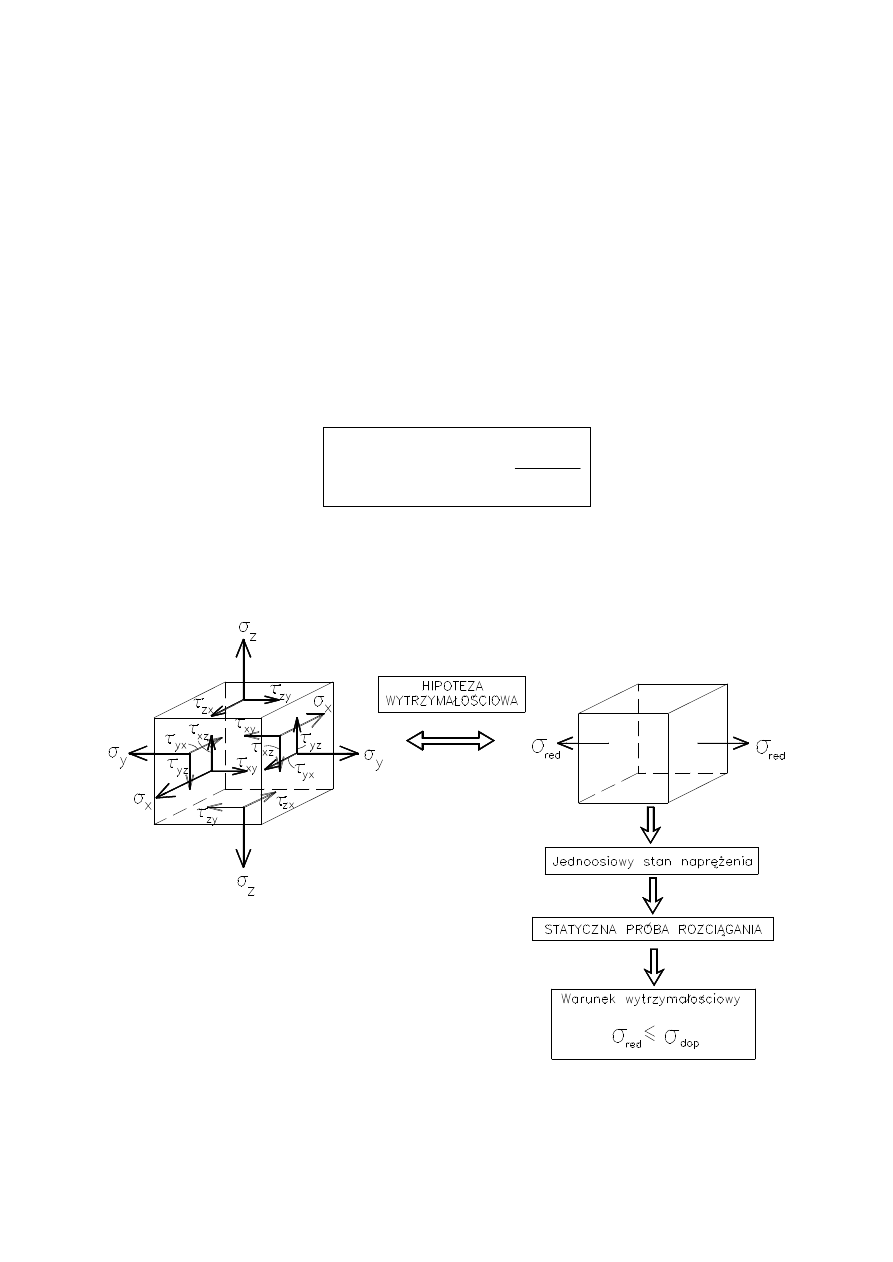
104
HIPOTEZY WYTRZYMAŁOŚCIOWE
W praktyce inżynierskiej występują złożone stany naprężenia,
będące kombinacją naprężeń normalnych i stycznych. Przyjęcie
hipotezy wytrzymałościowej umożliwia znalezienie matema-
tycznej funkcji pozwalającej na zastąpienie złożonego, prze-
strzennego stanu naprężenia przez stan jednoosiowego rozcią-
gania, dokładnie opisany przez statyczną próbę rozciągania.
Dzięki temu w obliczeniach wytrzymałościowych można wyko-
rzystać warunek wytrzymałościowy:
.
n
nieb
dop
red
Ideę obliczeń wytrzymałościowych opartą na
naprężeniach zredukowanych pokazano na rysunku.
07 Momenty, hipoteza
105
Obecnie znanych jest kilkadziesiąt hipotez wytrzymałościo-
wych. Niektóre z nich mają już tylko znaczenie historyczne, inne
nie są dostatecznie potwierdzone przez doświadczenie, jeszcze
inne są bardzo wyspecjalizowane i przeznaczone do wąskiej
klasy zagadnień wytrzymałościowych.
Spośród hipotez ogólnych, dających wyniki zgodne z do-
świadczeniem, należy wymienić hipotezę energii odkształce-
nia postaciowego (hipo
tezę Hubera).
Maksymilian Tytus Huber (1872-1950) polski uczony,
wspó
łtwórca współczesnej mechaniki teoretycznej,
profesor Politechniki Lwowskiej, Politechnika Warszawskiej
i po II Wojnie Światowej Politechniki Gdańskiej.
Hipoteza
ta należy do licznej grupy tzw. hipotez energetycz-
nych. Twórcy hipotezy (Huber 1904, Mises 1913, Hencky 1925)
przyjęli, że miarą wytężenia materiału jest wartość energii
sprężystej odkształcenia postaciowego.
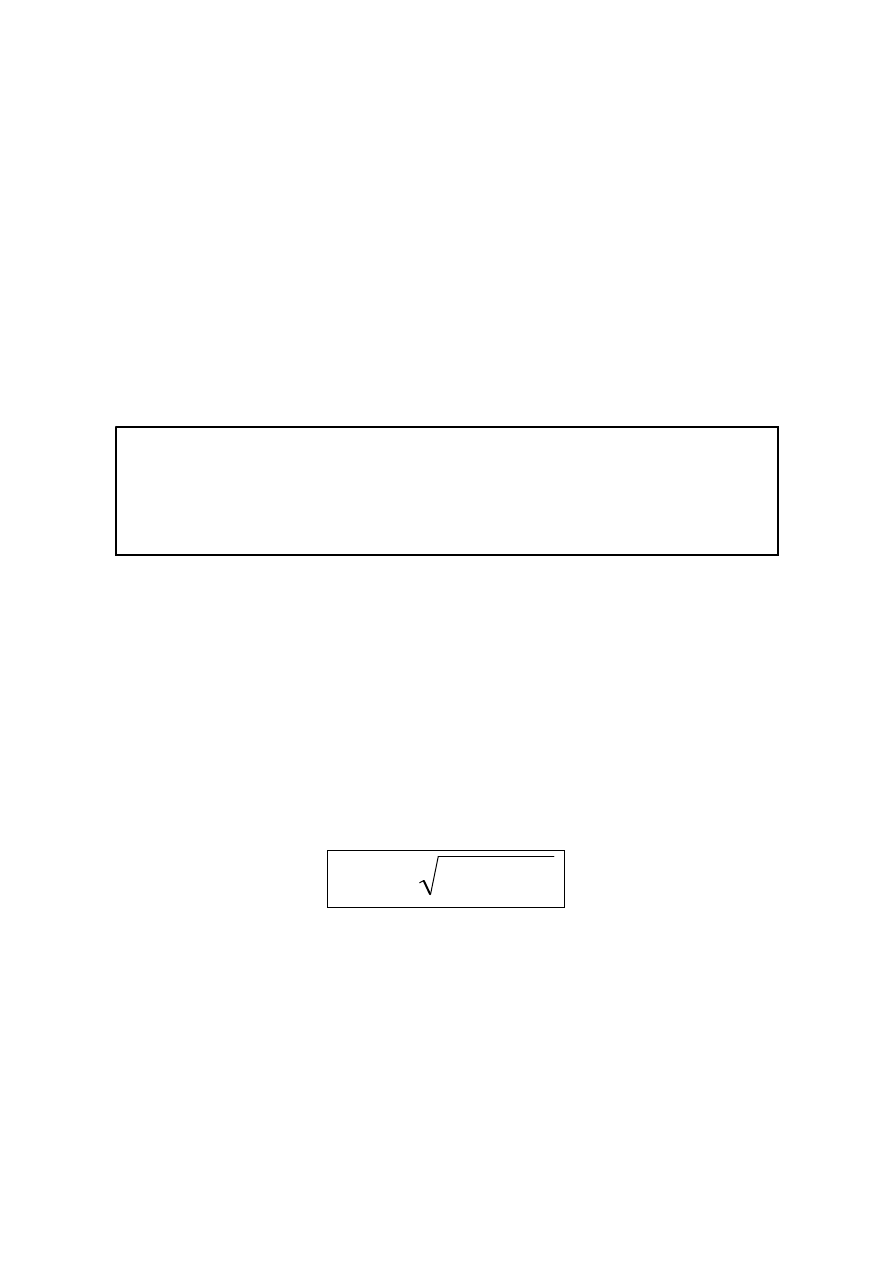
Dla przypadku jednoczesnego występowania naprężeń nor-
malnych i stycznych (zginanie belek), naprężenia zredukowane
zastępujące ten złożony stan naprężenia oblicza się z zależno-
ści:
.
3
2
2
red
Hipoteza Hubera (Hubera – Misesa – Hencky’go) jest po-
twierdzona doświadczalnie i jest obecnie bardzo szeroko sto-
sowana w praktyce inżynierskiej.
Wyszukiwarka
Podobne podstrony:
mechanika techniczna opracowane Nieznany
407 B2FB04K1 Identyfikacja Dane techniczne Momenty dokrecania Osie napedowe Nieznany
407 B3FB1KK1 Dane techniczne Momenty dokrecania hamulce Nieznany
407 B3DB0GK1 Identyfikacja Dane techniczne Momenty dokrecania Tylne zawieszenie Nieznany
407 B1HB3SK1 Identyfikacja Dane techniczne Momenty dokrecania z wtryskiem Nieznany
Moment bezw-, PW Transport, Gadżety i pomoce PW CD2, MECHANIKA, MECHANIKA !!, mechanika techniczna -
momentu, PW Transport, Gadżety i pomoce PW CD2, MECHANIKA, MECHANIKA !!, mechanika techniczna - labo
Momenty bezw, PW Transport, Gadżety i pomoce PW CD2, MECHANIKA, mechanika techniczna - laboratoria,
407 B1FB1DK1 Dane techniczne Momenty dokrecania Smarowanie (Silnik ) Nieznany
407 B1DB4CK1 Identyfikacja Dane techniczne Momenty dokrecania Glowica Nieznany
407 B2FB04K1 Identyfikacja Dane techniczne Momenty dokrecania Osie napedowe Nieznany
407 B3FB1KK1 Dane techniczne Momenty dokrecania hamulce Nieznany
więcej podobnych podstron