wer. 2014 MT
1
LABORATORIUM MECHANIKI EKSPERYMENTALNEJ
Instrukcja do ćwiczenia
4
Wyznaczanie współczynnika restytucji
Cel
ć
wiczenia
Celem
ć
wiczenia jest zapoznanie z podstawami modelowego opisu zderze
ń
oraz
sposobem do
ś
wiadczalnego wyznaczania współczynnika restytucji.
Literatura
1.
J.Leyko, Mechanika Ogólna, tom II.
2.
R. Grybo
ś
, Teoria uderzenia w dyskretnych układach mechanicznych
Zagadnienia kontrolne
1. Pop
ę
d siły
2. Zale
ż
no
ść
mi
ę
dzy p
ę
dem i pop
ę
dem
3. Zasada zachowania p
ę
du
4. Iloczyn skalarny i wektorowy
5. Definicja kr
ę
tu
6. Zasada kr
ę
tu
7. Zasada zachowania kr
ę
tu
8. Moment bezwładno
ś
ci ciała wzgl
ę
dem osi
9. Współczynnik restytucji
10. Definicja zderzenia
11. Zderzenia niespr
ęż
yste i spr
ęż
yste
12. Zderzenie proste i
ś
rodkowe
13. Energia kinetyczna w ruchu obrotowym
14. Wyznaczanie
ś
rodka ci
ęż
ko
ś
ci ciała zło
ż
onego z układu kilku podstawowych brył
15. Wahadło fizyczne – opis matematyczny ruchu i wnioski z niego wynikaj
ą
ce
16. Okres i cz
ę
sto
ść
kołowa waha
ń
wahadła fizycznego, zale
ż
no
ść
pomi
ę
dzy okresem
a cz
ę
sto
ś
ci
ą
17. Wyznaczanie momentu bezwładno
ś
ci wahadła na podstawie pomiaru okresu
ruchu
18. Przebieg
ć
wiczenia
1. Podstawy teoretyczne zwi
ą
zane z realizacj
ą
ć
wiczenia
Uwaga!
Poni
ż
sze wprowadzenie nie wyczerpuje tematu i jest jedynie, krótkim opisem
zagadnie
ń
pozwalaj
ą
cym zrozumie
ć
ogólnie przebieg
ć
wiczenia i metod
ę
pomiarow
ą
.
Aby móc odpowiedzie
ć
na wy
ż
ej przedstawione zagadnienia kontrolne nale
ż
y oprócz
instrukcji si
ę
gn
ąć
do
ź
ródeł literaturowych.
wer. 2014 MT
2
1.1. Wprowadzenie
W niektórych sytuacjach mamy do czynienia z siłami, które działaj
ą
na ciało w
okresie bardzo krótkiego przedziału czasu, osi
ą
gaj
ą
c bardzo du
ż
e warto
ś
ci chwilowe.
Tego rodzaju siły pojawiaj
ą
si
ę
przy zderzeniach ciał materialnych.
Analiza teoretyczna dotyczy najcz
ęś
ciej zderzenia doskonale spr
ęż
ystego lub
doskonale niespr
ęż
ystego (plastycznego). W praktyce mamy do czynienia ze
zderzeniami spr
ęż
ysto-plastycznymi i wówczas nale
ż
y uwzgl
ę
dni
ć
własno
ś
ci fizyczne
zderzaj
ą
cych si
ę
ciał. Własno
ś
ci te charakteryzuje współczynnik uderzenia, tzw.
współczynnik restytucji, który okre
ś
la jaka cz
ęść
p
ę
du ciała zostaje odzyskana po
zderzeniu.
W analizie zderze
ń
wprowadza si
ę
poj
ę
cia uderzenia prostego i
ś
rodkowego.
Zderzenie dwóch ciał nazywamy prostym, je
ś
li pr
ę
dko
ś
ci punktów, w których stykaj
ą
si
ę
ciała, s
ą
skierowane wzdłu
ż
wspólnej normalnej do powierzchni obu ciał.
Zderzenie nazywamy
ś
rodkowym je
ś
li wspomniana normalna przechodzi przez
ś
rodki mas uderzaj
ą
cych ciał. Dalej zakłada
ć
b
ę
dziemy,
ż
e podczas realizacji
ć
wiczenia dochodzi do zderzenia prostego (obrót ciała powodowany zderzeniem jest
pomijany). Dodatkowo przy wyznaczaniu współczynnika restytucji pomija si
ę
tarcie.
Rozpatrzmy jedno z ciał bior
ą
cych udział w zderzeniu i zapiszmy drug
ą
zasad
ę
dynamiki Newtona:
( )
dt
p
d
dt
v
m
d
dt
v
d
m
a
m
F
r
r
r
r
=
=
=
=
gdzie
p
r
jest p
ę
dem.
Bior
ą
c pod uwag
ę
,
ż
e siła zale
ż
y od czasu mo
ż
emy napisa
ć
:
dt
t
F
p
d
)
(
r
r
=
Dla całego procesu zderzenia:
∫
∫
=
konc
pocz
konc
pocz
t
t
p
p
dt
t
F
p
d
)
(
r
r
r
r
gdzie indeksy pocz i konc odnosz
ą
si
ę
do wielko
ś
ci przed i po zderzeniu.
Lewa strona równania stanowi zmian
ę
p
ę
du ciała. Prawa strona zale
ż
na od czasu
działania i wielko
ś
ci siły, stanowi pop
ę
d siły.
W wyniku zderzenia dwóch ciał i braku oddziaływa
ń
zewn
ę
trznych ulega zmianie p
ę
d
poszczególnych ciał bior
ą
cych udział w zderzeniu (nie zmienia si
ę
natomiast
całkowity p
ę
d układu tzn. p
ę
du kładu przed i po zderzeniu s
ą
sobie równe – zasada
zachowania p
ę
du).
Oznaczaj
ą
c chwil
ę
pojawienia si
ę
siły jako t
0
i czas jej trwania jako
τ
mamy:
τ
+
=
0
t
t
konc
i ostatecznie pop
ę
d (impuls) siły mo
ż
emy wyrazi
ć
jako:
∫
+
=
τ
0
0
)
(
t
t
dt
t
F
S
r
r
wer. 2014 MT
3
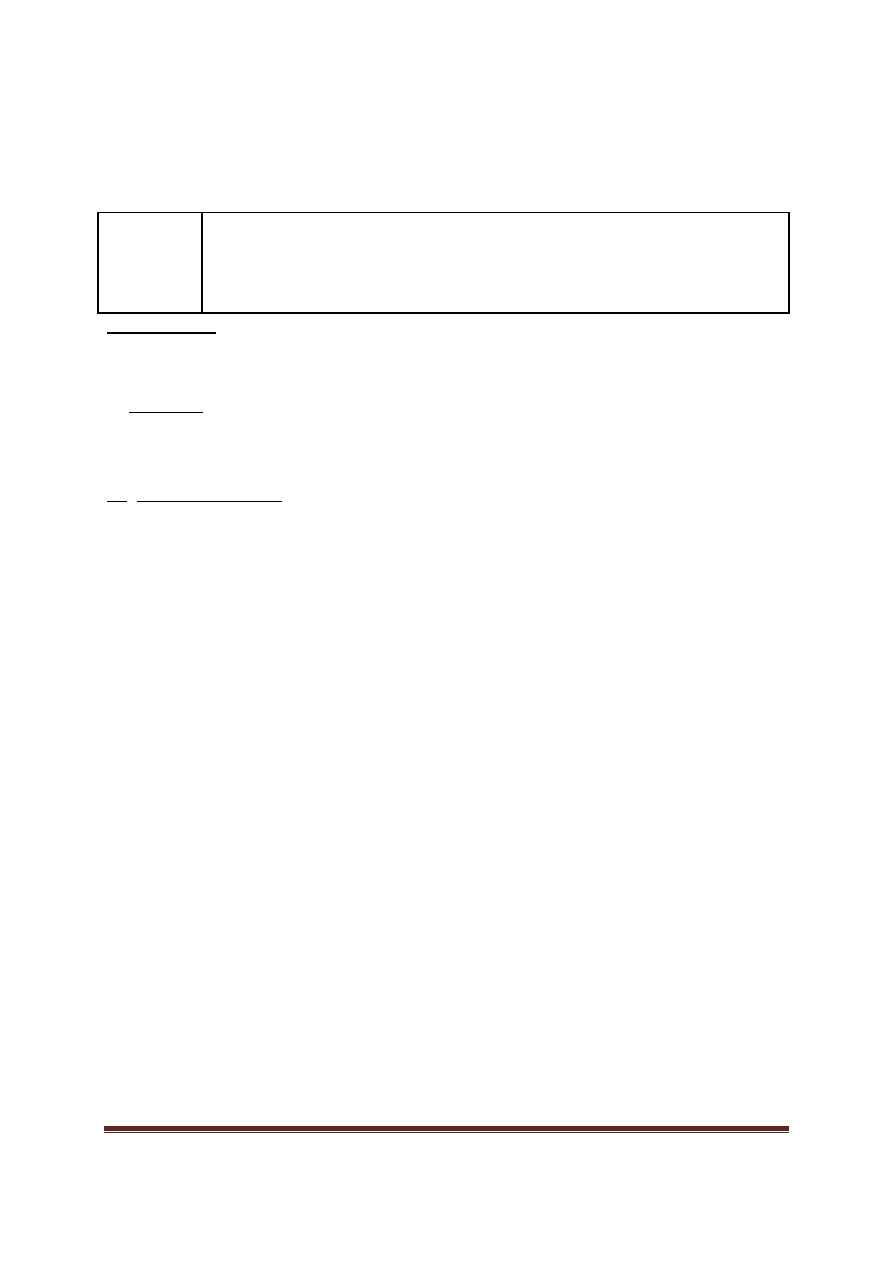
Na rysunku 1 znajduje si
ę
przykładowy przebieg czasowy warto
ś
ci siły. Zgodnie z
powy
ż
szym moduł pop
ę
du siły stanowi pole powierzchni pod krzyw
ą
F(t).
Rys.1. Warto
ść
chwilowa siły w funkcji czasu
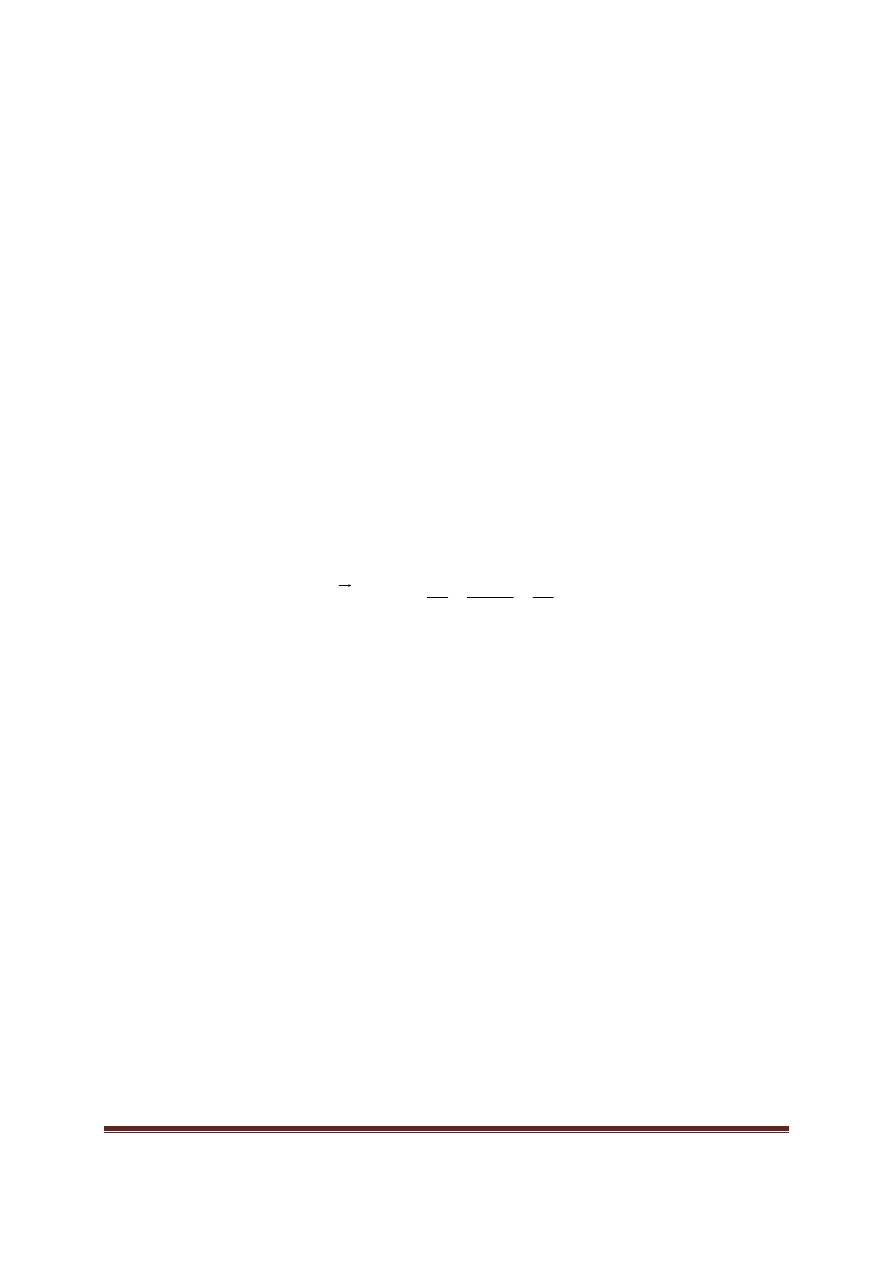
Proces zderzenia mo
ż
na podzieli
ć
na dwie fazy. Pierwsza z nich charakteryzuje si
ę
wzrostem siły chwilowej i narastaniem odkształce
ń
. Odkształcenia maj
ą
charakter
zarówno lokalny (w miejscu zetkni
ę
cia si
ę
ciał), jak i ogólny (obejmuj
ą
cy zasi
ę
giem
cał
ą
obj
ę
to
ść
zderzaj
ą
cych si
ę
ciał). Stan ten trwa do chwili
1
τ
=
t
(patrz rysunek 2).
Rys.2. Dwie fazy zderzenia. Dla uproszczenia przyj
ę
to,
pocz
ą
tek zderzenia w chwili t=0
W chwili tej siła i lokalne odkształcenia osi
ą
gaj
ą
warto
ść
maksymaln
ą
. W kolejnej
fazie trwaj
ą
cej do chwili
τ
nast
ę
puje spadek siły do zera i zanikanie odkształce
ń
lokalnych. Oznaczaj
ą
c odpowiednie impulsy siły jak na rysunku 2 mo
ż
emy napisa
ć
,
ż
e całkowity pop
ę
d siły wynosi:
2
1
S
S
S
r
r
r
+
=
W celu scharakteryzowania stopnia spr
ęż
ysto
ś
ci zderzenia wprowadza si
ę
współczynnik restytucji R, wyra
ż
aj
ą
cy jaka cz
ęść
impulsu pierwszej fazy zderzenia
zostaje odzyskana w drugiej fazie.
1
2
S
S
R
=
Je
ż
eli przebieg czasowy siły chwilowej w drugiej fazie, jest zwierciadlanym odbiciem
przebiegu w pierwszej fazie, to S
2
= S
1
, a R=1. Ma to miejsce wówczas gdy
odkształcenia lokalne i ogólne s
ą
wył
ą
cznie spr
ęż
yste i zderzeniu nie towarzysz
ą
ż
adne straty energii kinetycznej (zderzenie idealnie spr
ęż
yste). Drugi skrajny
wer. 2014 MT
4
przypadek stanowi zderzenie plastyczne (całkowicie niespr
ęż
yste), w którym ciała
doznaj
ą
odkształce
ń
trwałych, a wi
ę
c nie zanikaj
ą
cych mimo tego,
ż
e siła chwilowa
maleje do zera. Przy zderzeniu plastycznym istnieje tylko pierwsza faza, czyli S
2
=0,
S
1
=S, oraz R=0.
W warunkach rzeczywistych mamy do czynienia z przypadkami po
ś
rednimi
czyli zderzeniami elasto-plastycznymi (niespr
ęż
ystymi) dla których 0< R <1.
1.2. Zasada zmienno
ś
ci kr
ę
tu dla sił chwilowych
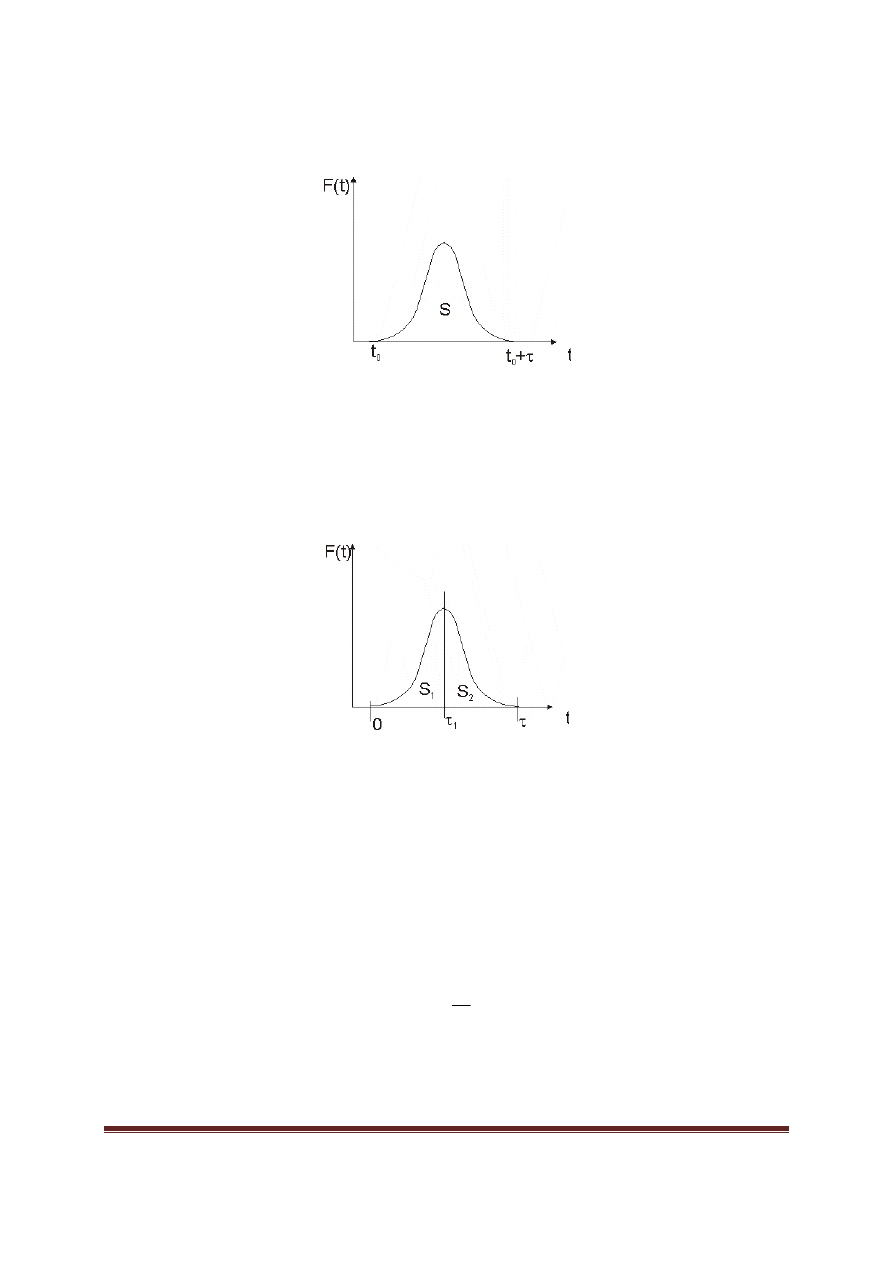
Rozpatrzmy ciało poddane działaniu siły chwilowej
F
r
w punkcie A.
Rys.3. Impuls sił chwilowych działaj
ą
cych na ciało sztywne.
Pocz
ą
tek układu współrz
ę
dnych le
ż
y w
ś
rodku masy.
Niech
K
r
oznacza wektor kr
ę
tu ciała wzgl
ę
dem
ś
rodka masy. Siła chwilowa
F
r
, której
impuls wynosi
S
r
, działa na promieniu – wektorze
r
r
.
Na podstawie zasady kr
ę
tu:
F
r
dt
K
d
r
r
r
×
=
Po scałkowaniu otrzymamy:
(
)
∫
×
=
−
τ
τ
0
)
(
dt
t
F
r
K
K
r
r
r
r
gdzie:
τ
K
r
oznacza kr
ę
t po zderzeniu
,
natomiast
K
r
- tu
ż
przed zderzeniem
Załó
ż
my,
ż
e
r
r
nie ulega zmianie w czasie działania siły chwilowej. Wówczas:
(
)
( )
S
r
dt
t
F
r
dt
t
F
r
r
r
r
r
r
×
=
×
=
×
∫
∫
τ
τ
0
0
)
(
Zatem równanie zasady zmienno
ś
ci kr
ę
tu dla sił chwilowych przyjmuje posta
ć
:
S
r
K
r
r
r
×
=
∆
(1)
1.3. Układ rzeczywisty
Rozpatrzmy zderzenie wahadła fizycznego 1 (bijaka) z nieruchomym
wahadłem fizycznym 2. Układ zaprezentowano na rysunku 4.
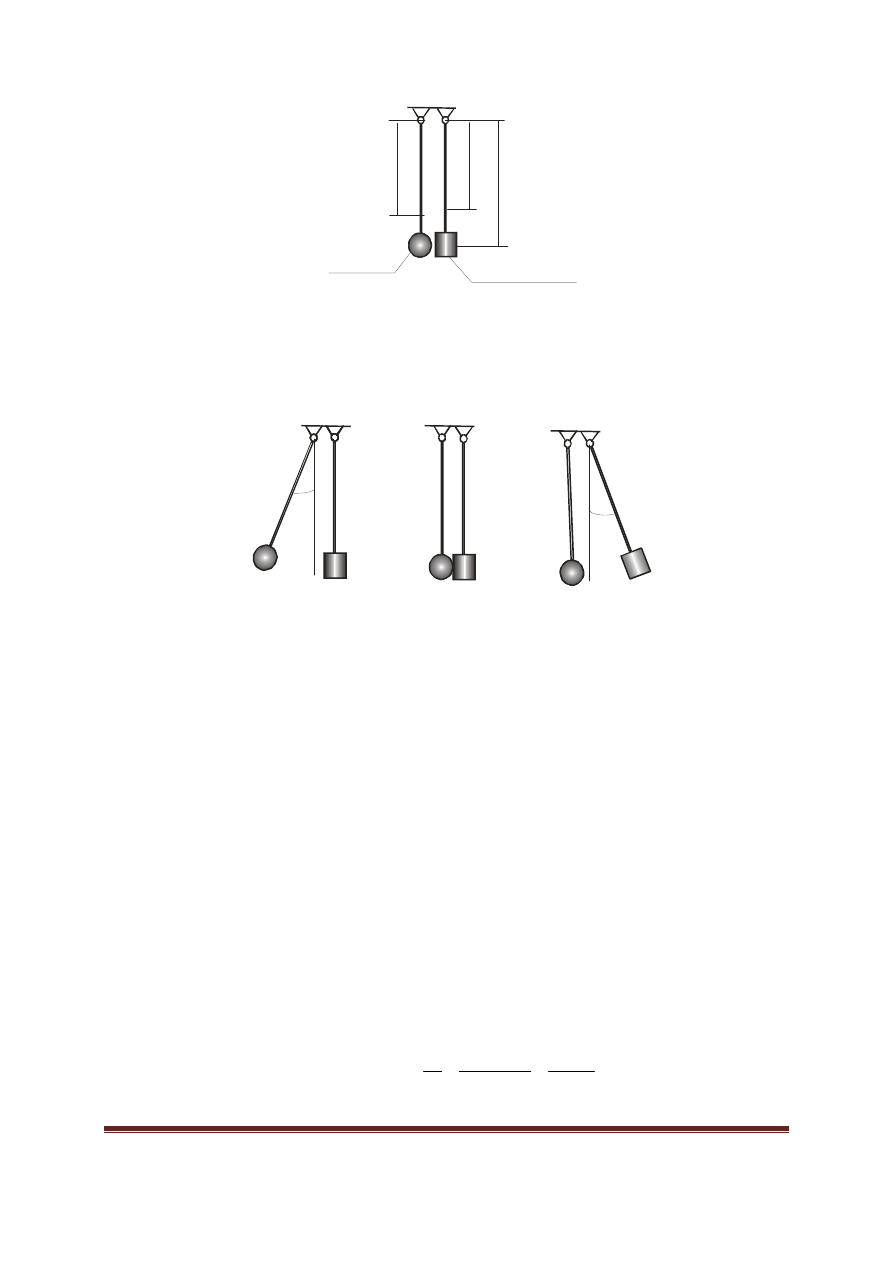
wer. 2014 MT
5
wahadło 2
h
1
wahadło 1
(bijak)
h
2
I
2
ω
2
=0
ω
1
=0
l
I
1
Rys.4. Wahadła w spoczynku (stykaj
ą
si
ę
swobodnie)
Przez I oznaczono odpowiednie momenty bezwładno
ś
ci wahadeł wzgl
ę
dem osi
obrotu, h poło
ż
enie
ś
rodków mas,
ω
pr
ę
dko
ś
ci k
ą
towe. Na rysunku 5 przedstawiono
poszczególne fazy ruchu zwi
ą
zane z prowadzonym podczas
ć
wiczenia
eksperymentem.
ω
1
=0
ω
2
=0
α
0
α
max
ω
*
1
a)
b)
c)
ω
1
ω
2
=0
ω
2
Rys.5. Kolejne fazy ruchu układu, a) wahadło 1 wychylone o k
ą
t
α
0
, b) wahadło 1 uderza w drugie z
pr
ę
dko
ś
ci
ą
k
ą
tow
ą
ω
1
, c) wahadło 2 wychyla si
ę
o k
ą
t
α
max
Skorzystamy z zasady zachowania kr
ę
tu, która mówi
,
ż
e przyrost kr
ę
tu ciała
materialnego wzgl
ę
dem bieguna wywołany działaniem siły chwilowej równy jest
momentowi jej impulsu wzgl
ę
dem tego
ż
bieguna (wzór 1). Poniewa
ż
ruch odbywa si
ę
w jednej płaszczy
ź
nie wi
ę
c kierunki wektorów kr
ę
tu obu wahadeł s
ą
równoległe.
Mo
ż
emy wi
ę
c zrezygnowa
ć
z opisu wektorowego.
Dla pierwszego okresu zderzenia mamy:
=
−
=
−
1
2
1
1
1
1
lS
I
lS
I
I
ω
ω
ω
(2)
gdzie:
ω
1
– pr
ę
dko
ść
k
ą
towa wahadła 1 przed zderzeniem,
ω
pr
ę
dko
ść
k
ą
towa w
ś
rodkowej fazie zderzenia (pr
ę
dko
ść
k
ą
towa zderzenia wahadeł).
Dla drugiej fazy zderzenia mamy:
=
−
−
=
−
2
2
2
2
2
1
*
1
1
lS
I
I
lS
I
I
ω
ω
ω
ω
(3)
gdzie:
ω
*
1
jest pr
ę
dko
ś
ci
ą
wahadła 1 po zderzeniu,
ω
2
jest pr
ę
dko
ś
ci
ą
wahadła 2.
Wykorzystuj
ą
c definicj
ę
współczynnika restytucji oraz powy
ż
sze układy
równa
ń
otrzymamy:
ω
ω
ω
ω
ω
ω
−
=
−
=
=
2
2
2
2
2
1
2
I
I
I
S
S
R
(4)
Z układu równa
ń
(2) mo
ż
emy wyznaczy
ć
nieznane
ω
:
wer. 2014 MT
6
2
1
1
1
I
I
I
+
=
ω
ω
(5)
Aby wyznaczy
ć
pr
ę
dko
ś
ci k
ą
towe nale
ż
y przyrówna
ć
energi
ę
kinetyczn
ą
T do
pracy L sił ci
ęż
ko
ś
ci.
)
cos
1
(
2
1
0
1
1
2
1
1
α
ω
−
=
gh
m
I
(6)
gdzie: m
1
masa pierwszego wahadła.
Powy
ż
sze równanie prowadzi do:
1
0
1
1
1
)
cos
1
(
2
I
gh
m
α
ω
−
=
(7a)
Analogicznie mo
ż
na wyznaczy
ć
ω
2
co daje:
2
max
2
2
2
)
cos
1
(
2
I
gh
m
α
ω
−
=
(7b)
Momenty bezwładno
ś
ci wahadeł mo
ż
na wyznaczy
ć
do
ś
wiadczalnie za
pomoc
ą
wzoru:
2
2
4
π
i
i
i
i
T
gh
m
I
=
(8)
gdzie: T
i
–
ś
redni okres waha
ń
i – tego wahadła fizycznego, h
i
– odległo
ść
ś
rodka
masy od osi obrotu wahadła (wyznaczona na podstawie oblicze
ń
).
2. Realizacja
ć
wiczenia
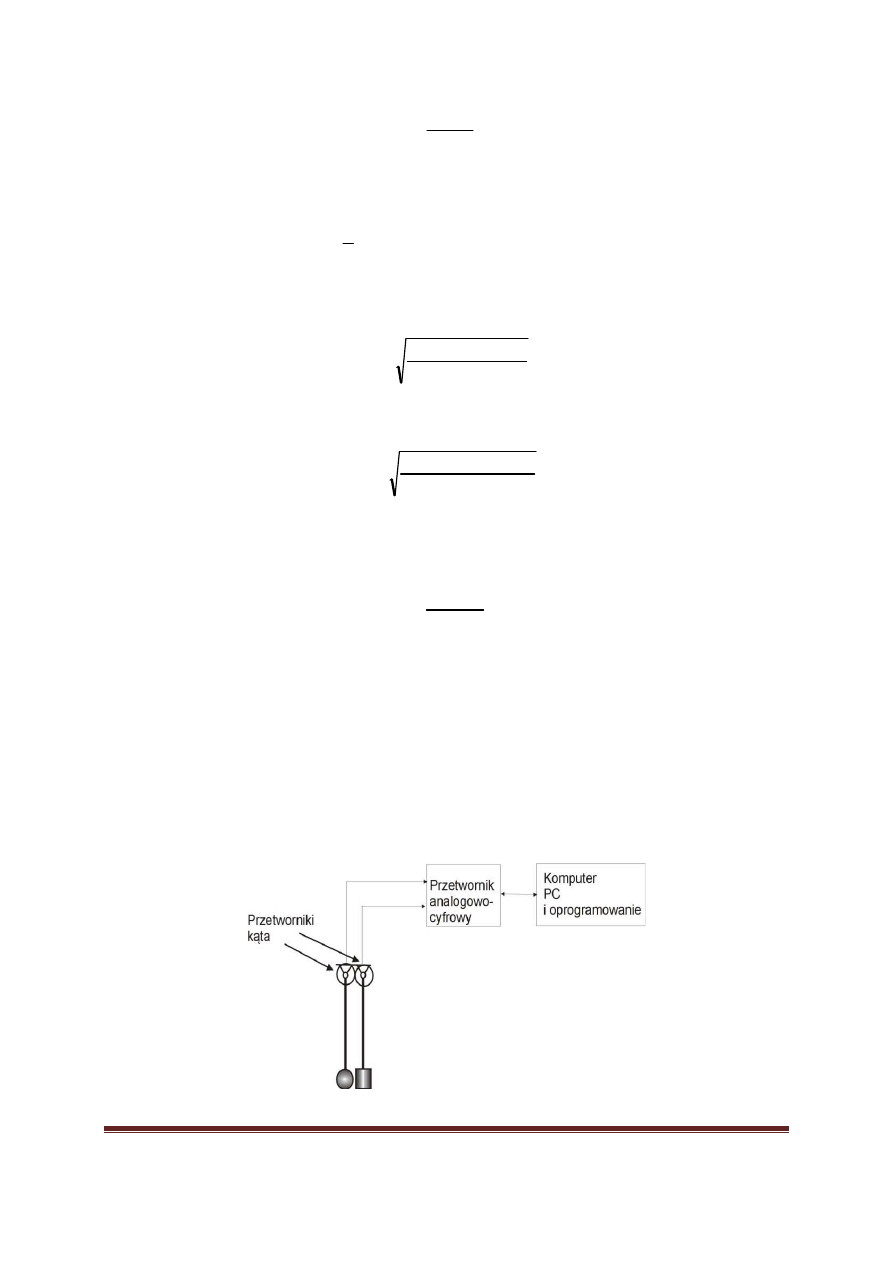
2.1. Stanowisko do realizacji pomiaru
Stanowisko do realizacji pomiaru składa si
ę
z dwóch wahadeł osadzonych na
osiach przetworników k
ą
ta, przetwornika analogowo cyfrowego i komputera wraz z
dedykowanym oprogramowaniem (rys. 6).
Rys.6. Schemat stanowiska i toru pomiarowego
wer. 2014 MT
7
Oprogramowanie pozwala na pomiar okresu waha
ń
wahadeł oraz rejestracj
ę
zmian k
ą
tów podczas zderzenia.
2.2. Przebieg
ć
wiczenia
Ogólny schemat procedury pomiarowej jest nast
ę
puj
ą
cy.
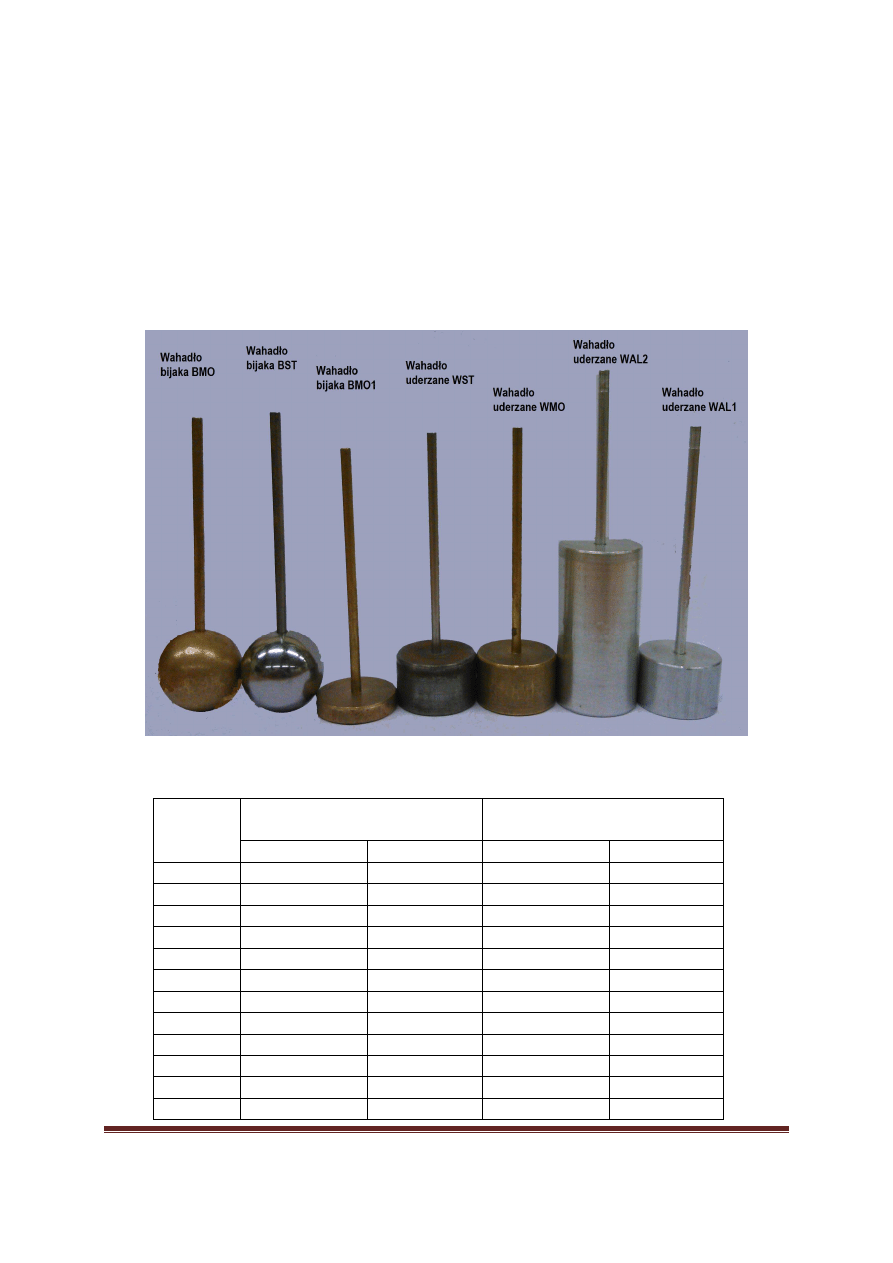
1) Zidentyfikuj par
ę
bijak i wahadło uderzane dla zadanego przez
prowadz
ą
cego wariantu
ć
wiczenia (patrz tabela 1). Na fotografii 1 przedstawiono
dost
ę
pne wahadła bijaków i wahadła uderzane wraz z przyj
ę
tymi oznaczeniami.
Fot.1. Zestaw wahadeł bijaków i wahadeł uderzanych dost
ę
pnych w
ć
wiczeniu
Tabela 1. Warianty
ć
wiczenia
Nr
wariantu
Wahadło bijaka
Wahadło uderzane
Oznaczenie
Materiał
Oznaczenie
Materiał
1
BMO
Mosi
ą
dz
WST
Stal
2
BMO
Mosi
ą
dz
WMO
Mosi
ą
dz
3
BMO
Mosi
ą
dz
WAL1
Aluminium
4
BMO
Mosi
ą
dz
WAL2
Aluminium
5
BST
Stal
WST
Stal
6
BST
Stal
WMO
Mosi
ą
dz
7
BST
Stal
WAL1
Aluminium
8
BST
Stal
WAL2
Aluminium
9
BMO1
Mosi
ą
dz
WST
Stal
10
BMO1
Mosi
ą
dz
WMO
Mosi
ą
dz
11
BMO1
Mosi
ą
dz
WAL1
Aluminium
12
BMO1
Mosi
ą
dz
WAL2
Aluminium

wer. 2014 MT
8
2) Wyznacz masy wahadeł, długo
ść
l
(patrz rys. 4) od punktu zawieszenia do punktu
zderzenia. W przypadku bijaka BMO1 przyjmij,
ż
e zderzenie zachodzi na połowie
wysoko
ś
ci walca bijaka.
3) Zmierz wahadła, narysuj je i zwymiaruj. Zaznacz tak
ż
e na rysunku długo
ść
l .
4)
Wyznacz teoretyczne poło
ż
enie
ś
rodka masy obu wahadeł w odniesieniu do
punktu zawieszenia. W tym celu przyjmij,
ż
e wszystkie elementy wahadła wykonane
s
ą
z tego samego materiału i tworz
ą
brył
ę
jednorodn
ą
. Licz
ą
c wi
ę
c obj
ę
to
ś
ci
podstawowych brył, z których składa si
ę
wahadło, mo
ż
na przyj
ąć
,
ż
e
ś
rodek masy
cało
ś
ci (wahadła) b
ę
dzie miał współrz
ę
dn
ą
:
∑
∑
∑
∑
=
=
=
=
=
=
N
i
i
N
i
i
i
N
i
i
N
i
i
i
c
V
V
h
m
m
h
h
1
1
1
1
gdzie: V
i
i m
i
s
ą
odpowiednio obj
ę
to
ś
ci
ą
i mas
ą
elementarnej bryły, N – liczb
ą
elementarnych brył, natomiast h
i
poło
ż
eniem
ś
rodka masy elementarnej bryły i.
5) Reguluj
ą
c wysoko
ść
nó
ż
ek podstawy stanowiska wypoziomuj podstaw
ę
.
6) Zawie
ś
wahadło bijaka w uchwycie przetwornika 1 i zmierz za pomoc
ą
programu
okres waha
ń
tego wahadła (parametry akwizycji - patrz instrukcja obsługi programu
w zał
ą
czniku Z1).
7) Zawie
ś
wahadło uderzane w uchwycie przetwornika 2 i dokonaj pomiaru jak wy
ż
ej.
8) Na podstawie wzoru 8 oblicz momenty bezwładno
ś
ci wahadeł.
9) Dla zadanego wariantu
ć
wiczenia dokonaj za pomoc
ą
programu rejestracji
przebiegu zderzenia (patrz instrukcja obsługi programu w zał
ą
czniku Z1).
Uwaga!
W przypadku gdy spoczywaj
ą
ce swobodnie wahadła nie b
ę
d
ą
w pobli
ż
u
pozycji zerowej (odczyty warto
ś
ci k
ą
ta b
ę
d
ą
ró
ż
ne od zera o wi
ę
cej ni
ż
1
o
) przerwij
pomiar i dokonaj kalibracji toru (patrz zał
ą
cznik Z1).
10) Uzyskane rejestracje zapisuj na dysku. B
ę
d
ą
one potrzebne do dalszego
opracowania wyników
ć
wiczenia (w celu skopiowania danych konieczne jest
posiadanie pami
ę
ci zewn
ę
trznej typu flash). W celu umo
ż
liwienia weryfikacji
wyników zapisuj je zgodnie z opisem, który znajdziesz na stanowisku.
Rejestracje wykonaj dla podanych w arkuszu sprawozdania k
ą
tów pocz
ą
tkowych
α
o
.
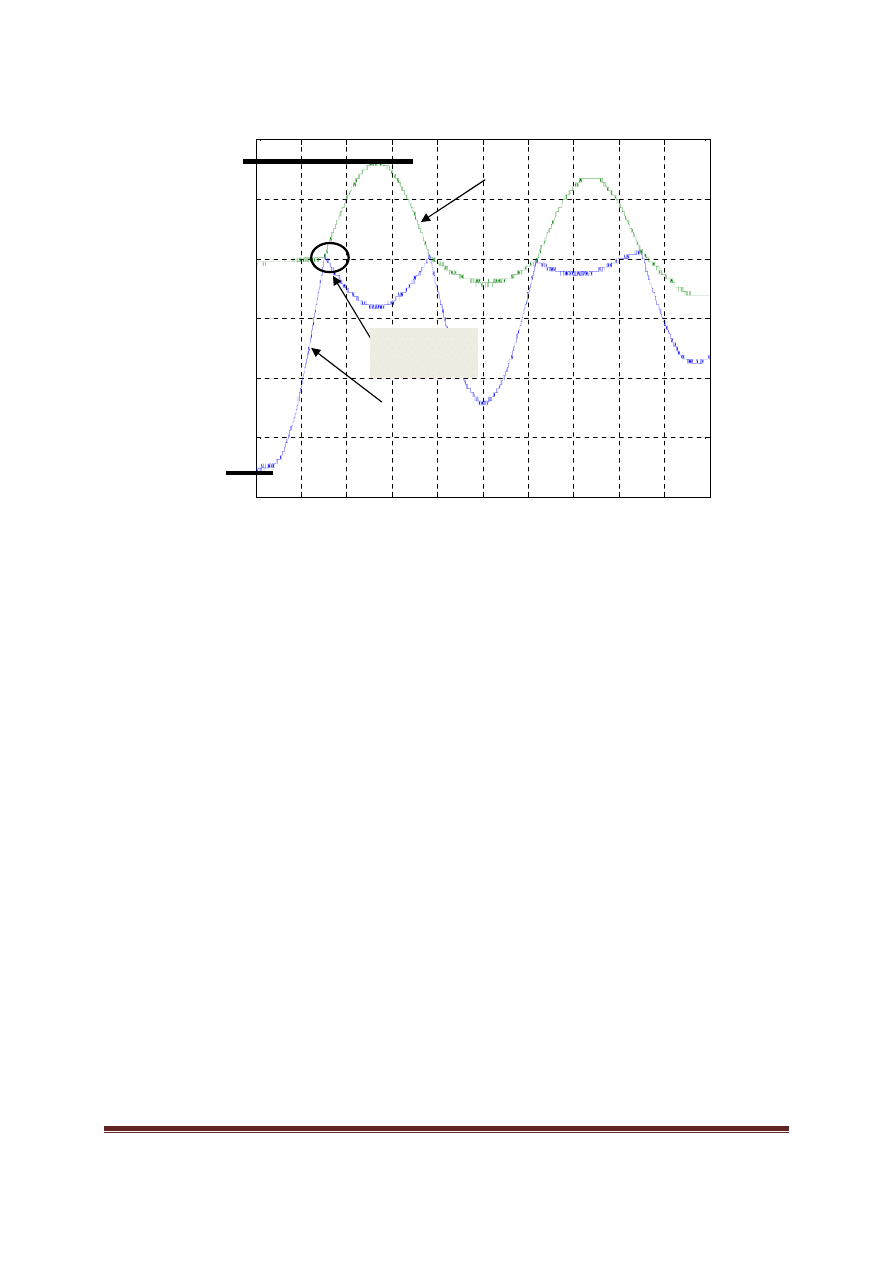
11) Z uzyskanych rejestracji odczytaj
α
o
i
α
max
czyli odpowiednio k
ą
t pocz
ą
tkowy
wychylenia bijaka (wahadła 1) i maksymalny k
ą
t jaki osi
ą
gnie wahadło uderzane
(wahadło 2) po pierwszym zderzeniu (patrz rysunek 7). Praktycznie b
ę
d
ą
to
odpowiednio minimalny (bior
ą
c pod uwag
ę
ujemny znak) k
ą
t wychylenia wahadła 1 i
maksymalny k
ą
t wychylenia wahadła 2 jakie zostały zarejestrowane w pliku.
wer. 2014 MT
9
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
-20
-15
-10
-5
0
5
10
Czas [s]
K
a
t
w
y
c
h
y
le
n
ia
z
p
o
lo
z
e
n
ia
r
o
w
n
o
w
a
g
i
Rys.7. Przykładowy wynik rejestracji ruchu obu wahadeł
Nale
ż
y pami
ę
ta
ć
,
ż
e do oblicze
ń
odpowiednie k
ą
ty nale
ż
y przyjmowa
ć
jako
dodatnie, pomijaj
ą
c informacj
ę
o kierunku ich odmierzania.
12) Wyznacz pr
ę
dko
ś
ci k
ą
towe
ω
1
i
ω
2
ze wzorów (7a) i (7b) oraz
ω
ze wzoru (5).
13) Wyznacz współczynnik restytucji ze wzoru (4) dla ka
ż
dego zarejestrowanego
przypadku i oszacuj jego niepewno
ść
pomiarow
ą
(patrz zał
ą
cznik Z2). Załó
ż
,
ż
e R
nie zale
ż
y istotnie od
ω
1
i wyznacz
ś
redni
ą
wa
ż
on
ą
R z uwzgl
ę
dnieniem niepewno
ś
ci
pomiarowych. Sprawd
ź
to zało
ż
enie rysuj
ą
c wykres R(
ω
1
) wraz z niepewno
ś
ciami
pomiarowymi.
Uwaga!
Odrzu
ć
wyniki bł
ę
dne – sprzeczne z rzeczywisto
ś
ci
ą
, je
ś
li takie wyst
ę
puj
ą
(nie
uwzgl
ę
dniaj ich w
ś
redniej ani na wykresie R(
ω
1
)).
14) Przekształcaj
ą
c drugie równanie w układzie równa
ń
(2) wyznacz impuls siły S
1
a
nast
ę
pnie znaj
ą
c współczynnik restytucji wyznacz impuls siły S
2
.
15) Sporz
ą
d
ź
wykres oszacowania
ś
redniej siły podczas zderzenia w pierwszej
i drugiej jego fazie w zale
ż
no
ś
ci od pr
ę
dko
ś
ci k
ą
towej bijaka podczas zderzenia
zakładaj
ą
c,
ż
e czasy pierwszej i drugiej fazy zderzenia wynosz
ą
T=0,005 ±0,001s.
Na wykresie uwzgl
ę
dnij niepewno
ś
ci pomiarowe.
Bior
ą
c pod uwag
ę
definicj
ę
pop
ę
du siły dla okre
ś
lonego jej kierunku:
∫
=
T
dt
t
F
S
0
)
(
oraz definicj
ę
warto
ś
ci
ś
redniej:
Bijak
(wahadło 1)
Wahadło uderzane
(wahadło 2)
Kąt wychylenia początkowego
wahadła 1 ( α
o
)
Pierwsze
zderzenie
Kąt wychylenia końcowego wahadła 2
( α
max
)
wer. 2014 MT
10
∫
=
T
sr
dt
t
F
T
F
0
)
(
1
mo
ż
emy zapisa
ć
:
S
dt
t
F
T
F
T
sr
=
=
∫
0
)
(
Tak wi
ę
c mo
ż
emy oszacowa
ć
ś
redni
ą
warto
ść
siły jako:
T
S
F
sr
=
Wszystkie wyniki wpisz do odpowiednich tabel zgodnie z poleceniami
zawartymi w arkuszu sprawozdania. Sporz
ą
d
ź
wymagane wykresy. Opracuj wnioski
dotycz
ą
ce warto
ś
ci wyznaczonego współczynnika restytucji, jego tendencji zmian w
funkcji pr
ę
dko
ś
ci k
ą
towej bijaka podczas zderzenia, warto
ś
ci niepewno
ś
ci
pomiarowej i dokładno
ś
ci metody itp. Spróbuj tak
ż
e porówna
ć
otrzymane wyniki R z
danymi literaturowymi. Zastanów si
ę
nad przyczynami wyst
ą
pienia bł
ę
dów grubych
prowadz
ą
cych do wyników sprzecznych z rzeczywisto
ś
ci
ą
(je
ś
li takie wyst
ą
pi
ą
).
Skomentuj uzyskane warto
ś
ci
ś
rednie sił wyst
ę
puj
ą
ce podczas zderzenia.
UWAGA !!!
Wahadła nale
ż
y montowa
ć
i demontowa
ć
bardzo ostro
ż
nie, by nie uszkodzi
ć
przetworników k
ą
ta obrotu. Na osiach przetworników k
ą
ta s
ą
zamontowane
aluminiowe pier
ś
cienie – uchwyty słu
żą
ce do zawieszenia wahadeł. NIE
DEMONTOWA
Ć
TYCH UCHWYTÓW. Na płaszczy
ź
nie czołowej ka
ż
dego z
uchwytów znajduje si
ę
ś
ruba zaciskowa do mocowania wahadła.
Ś
RUB
Ę
NALE
Ż
Y
DOKR
Ę
CA
Ć
PALCAMI, NIE STOSOWA
Ć
NARZ
Ę
DZI (KOMBINEREK, KLUCZY
ITP.) Mas
ę
uchwytu i
ś
ruby zaciskowej pomin
ąć
przy obliczeniach.
Wahadła nale
ż
y wkłada
ć
do otworów w uchwycie bez stosowania nadmiernej
siły.
Ś
ruba zaciskowa powinna by
ć
odpowiednio wykr
ę
cona, by pr
ę
t wahadła wsun
ą
ł
si
ę
do ko
ń
ca otworu mocuj
ą
cego. Nie wkłada
ć
i nie zdejmowa
ć
wahadeł „na sił
ę
”, nie
nagina
ć
pr
ę
tów wahadeł. Ewentualne problemy z monta
ż
em wahadeł zgłosi
ć
prowadz
ą
cemu zaj
ę
cia.
Wahadło nale
ż
y zwa
ż
y
ć
i zwymiarowa
ć
jako cało
ść
. NIE WYKR
Ę
CA
Ć
PR
Ę
TA
WAHADŁA. Poło
ż
enie
ś
rodka masy wahadła obliczy
ć
na podstawie wymiarów
przyjmuj
ą
c,
ż
e wahadło wykonane jest w cało
ś
ci z jednego materiału. Przy
obliczeniach pomin
ąć
niewielkie otwory technologiczne, podtoczenia itp.
WAHADŁA SŁU
ŻĄ
WYŁ
Ą
CZNIE DO REALIZACJI
Ć
WICZENIA.
S
Ą
PODATNE NA USZKODZENIE, NP. ZGI
Ę
CIE PR
Ę
TA.
WYKORZYSTYWANIE ICH W SPOSÓB NIEZGODNY Z NINIEJSZ
Ą
INSTRUKCJ
Ą
UZNANE B
Ę
DZIE ZA NIEPRZYGOTOWANIE DO
Ć
WICZENIA Z WSZYSTKIMI
TEGO KONSEKWENCJAMI.
wer. 2014 MT
11
ZAŁ
Ą
CZNIKI
Z1. Opis programu komputerowego
Poni
ż
ej podano informacje uzupełniaj
ą
ce dotycz
ą
ce obsługi stosowanego
oprogramowania komputerowego „WspRestytucji”.
Przed przyst
ą
pieniem do bada
ń
nale
ż
y sprawdzi
ć
czy stanowisko jest
wypoziomowane. W razie potrzeby nale
ż
y je wypoziomowa
ć
i ustali
ć
nowe warto
ś
ci
napi
ę
cia z przetworników k
ą
ta, odpowiadaj
ą
ce poło
ż
eniu zerowemu wahadeł. W tym
celu nale
ż
y nacisn
ąć
Ctrl+K i stosowa
ć
si
ę
do polecania wy
ś
wietlonego przez
program. Pocz
ą
tkowe warto
ś
ci k
ą
ta dla swobodnie spoczywaj
ą
cych wahadeł nie
powinny ró
ż
ni
ć
si
ę
od zera wi
ę
cej ni
ż
1 stopie
ń
.
Ć
wiczenie wykonywane jest w dwóch etapach. W pierwszym etapie nale
ż
y
wykona
ć
wszystkie pomiary wst
ę
pne słu
żą
ce okre
ś
leniu momentów bezwładno
ś
ci
poszczególnych wahadeł (patrz wzór 8).
W celu okre
ś
lenia okresu waha
ń
wahadeł nale
ż
y montowa
ć
je w stanowisku
pojedynczo. Aby unikn
ąć
pomyłki nale
ż
y montowa
ć
wahadło bijaka (nr 1) na osi z
lewej strony stanowiska, a wahadło uderzane (nr 2) na osi z prawej strony
stanowiska (zgodnie z rysunkiem 6).
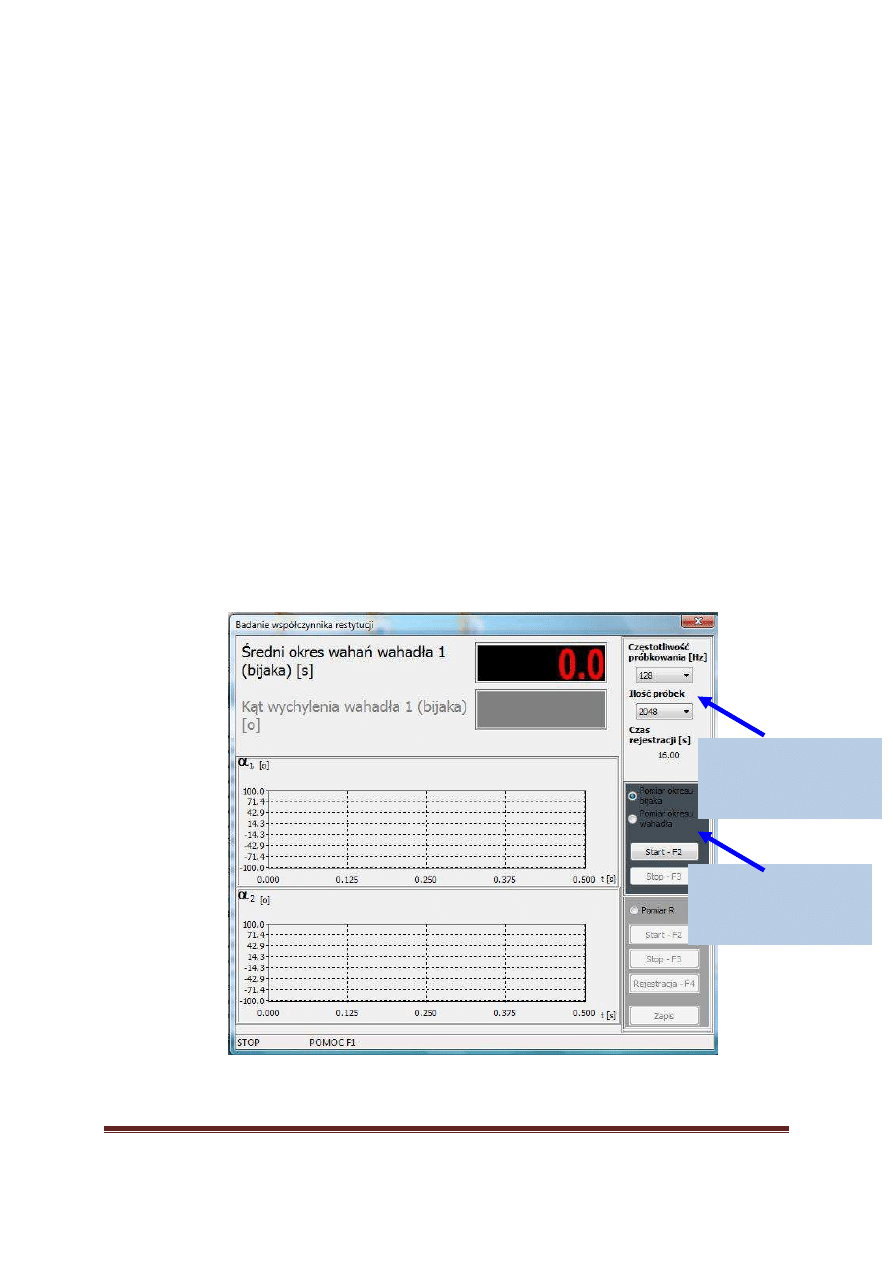
W oknie głównym programu wybra
ć
, którego wahadła w danym momencie ma
dotyczy
ć
pomiar (patrz rysunek 8).
Rys.8. Okno główne programu – etap przygotowania do pomiaru okresów waha
ń
wahadeł
Wybór trybu pomiaru
okresu poszczególnych
wahadeł
Wybór parametrów
próbkowania

wer. 2014 MT
12
Nale
ż
y tak
ż
e dobra
ć
parametry akwizycji sygnału, tak aby czas rejestracji
wynosił co najmniej 64 sek (liczba próbek 8192, cz
ę
stotliwo
ść
próbkowania 128Hz).
Pami
ę
taj aby k
ą
t pocz
ą
tkowy wychylenia danego wahadła podczas pomiaru okresu
waha
ń
nie przekraczał 10
o
.
Czas rejestracji T
r
wynika z ustawionych parametrów: cz
ę
stotliwo
ś
ci
próbkowania (fp [Hz]) i ilo
ś
ci próbek (N) wg wzoru:
fp
N
T
r
=
[s]
(Z1)
Dłu
ż
szy czas rejestracji pozwoli na uzyskanie wi
ę
kszej liczby u
ś
rednie
ń
okresu.
Pami
ę
taj aby zapisa
ć
w arkuszu pomiarowym parametry rejestracji sygnału.
Nast
ę
pnie nale
ż
y wychyli
ć
badane wahadło z poło
ż
enia równowagi i klikn
ąć
"Start-F2" (lub nacisn
ąć
klawisz F2). Program rozpocznie pomiar warto
ś
ci chwilowej
wychylenia wahadła wzgl
ę
dem poło
ż
enia równowagi. K
ą
t ujemny b
ę
dzie
wskazywany dla wychylenia w kierunku zgodnym z ruchem wskazówek zegara. Aby
dokona
ć
poprawnego pomiaru okresu nale
ż
y zada
ć
wychylenie pocz
ą
tkowe poni
ż
ej
10
o
i pu
ś
ci
ć
swobodnie wahadło. Program automatycznie rozpocznie rejestracj
ę
po
przej
ś
ciu wahadła przez poło
ż
enie równowagi a nast
ę
pnie sam zatrzyma rejestracj
ę
po odczytaniu zadanej liczby próbek. Oczekiwanie na ruch wahadła mo
ż
na przerwa
ć
poprzez „Stop” (F3).
Ś
redni okres waha
ń
mo
ż
na odczyta
ć
w odpowiednim polu okna głównego.
Wyniki pomiaru jak i parametry akwizycji sygnału nale
ż
y wpisa
ć
w arkusz
sprawozdania. Powy
ż
sza procedura musi by
ć
przeprowadzona dla obu wahadeł.
W drugim etapie
ć
wiczenia nale
ż
y dokona
ć
pomiarów odpowiednich k
ą
tów
wychyle
ń
wahadeł. W tym celu nale
ż
y zamontowa
ć
oba wahadła i zarejestrowa
ć
sygnał podczas ich zderzenia. W oknie głównym programu (rys. 9) nale
ż
y zaznaczy
ć
opcj
ę
pomiaru R i ustawi
ć
odpowiednie parametry akwizycji. Zalecane jest ustawienie
du
ż
ej cz
ę
stotliwo
ś
ci próbkowania tak
,
aby odwzorowanie przebiegu czasowego było
jak najdokładniejsze. Wynikowy czas rejestracji powinien pozwoli
ć
na uchwycenie
momentu zderzenia i zatrzymania ruchu wahadła 2 w maksymalnym wychyleniu po
zderzeniu. Zaleca si
ę
aby wynikowy czas rejestracji wynosił 1s (cz
ę
stotliwo
ść
próbkowania 8192 Hz, liczba próbek 8192).
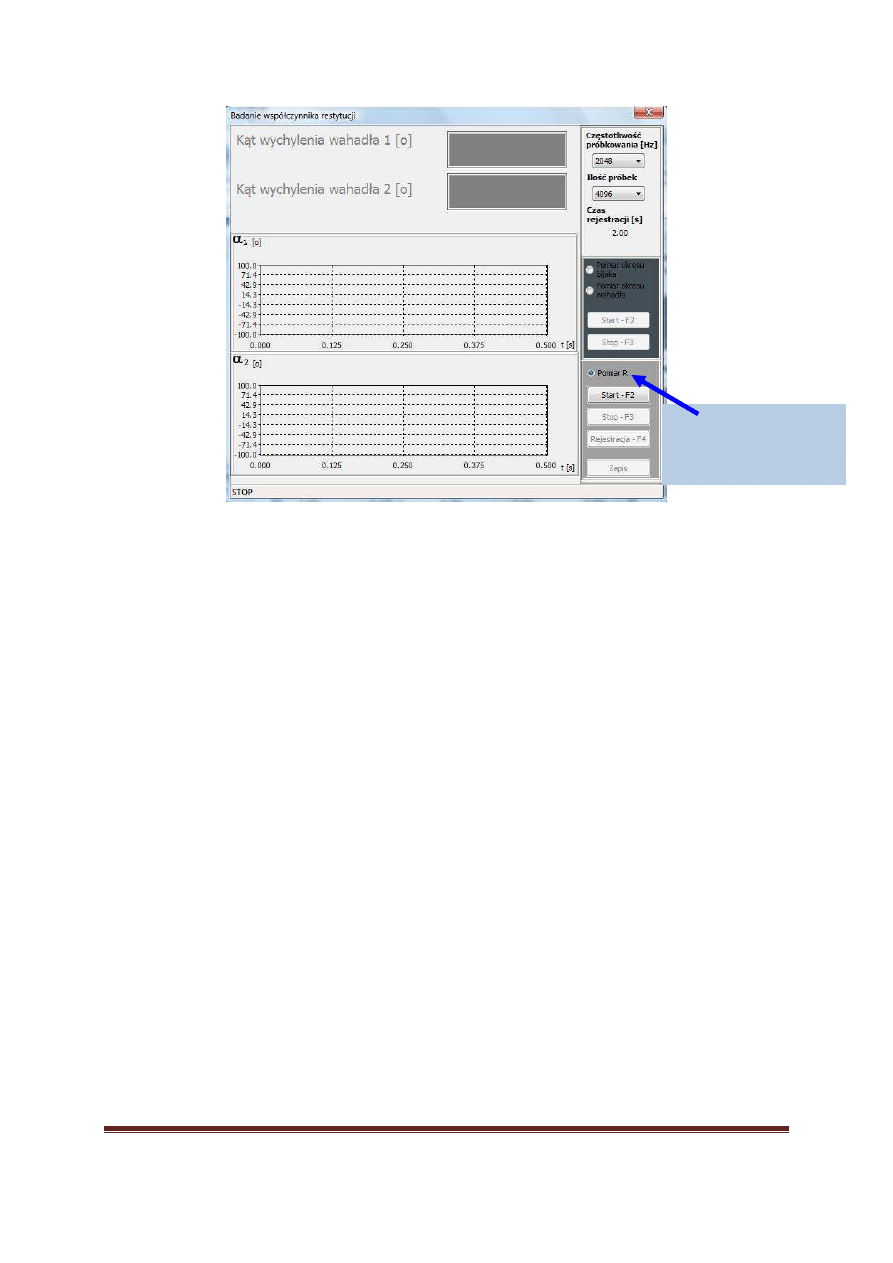
wer. 2014 MT
13
Rys.9. główne programu – etap przygotowania do rejestracji zderzenia
Nast
ę
pnie nale
ż
y wybra
ć
polecenie „Start – F2” (lub nacisn
ąć
klawisz F2). W
polach rozmieszczonych u góry okna głównego mo
ż
na obserwowa
ć
aktualne
warto
ś
ci k
ą
ta wychyle
ń
ka
ż
dego z wahadeł. Wahadło bijaka nale
ż
y wychyli
ć
o
wybrany k
ą
t z pozycji równowagi
,
a wahadło 2 powinno pozostawa
ć
w pozycji
równowagi. Dla wahadła 2 wy
ś
wietlana warto
ść
k
ą
ta powinna by
ć
bliska zeru (mo
ż
e
ona nieco oscylowa
ć
wokół zera, ze wzgl
ę
du na wyst
ę
puj
ą
cy szum). Maksymalny k
ą
t
wychylenia wahadła bijaka to 60
o
. W kolejnym kroku nale
ż
y nacisn
ąć
klawisz F4 lub
wybra
ć
polecenie „Rejestracja” a nast
ę
pnie pu
ś
ci
ć
bijak tak
,
aby rozpocz
ą
ł si
ę
jego
swobodny ruch (nie nale
ż
y nadawa
ć
pr
ę
dko
ś
ci pocz
ą
tkowej bijakowi).
Uwaga !
Nale
ż
y pami
ę
ta
ć
aby wahadło bijaka uwolni
ć
dopiero po rozpocz
ę
ciu
rejestracji tak aby k
ą
t pocz
ą
tkowy mógł zosta
ć
jednoznacznie odczytany z
otrzymanej rejestracji. Zwłoka ta nie mo
ż
e by
ć
zbyt długa gdy
ż
rejestracja musi obj
ąć
tak
ż
e moment gdy wahadło 2 po zderzeniu osi
ą
gnie warto
ść
maksymaln
ą
.
Poprawno
ść
rejestracji nale
ż
y sprawdzi
ć
obserwuj
ą
c wykresy przebiegów czasowych
wy
ś
wietlanych przez program.
Po upływie zadanego czasu rejestracji program automatycznie zatrzyma
akwizycj
ę
sygnału i wy
ś
wietli przebieg czasowy zmian k
ą
tów ka
ż
dego z wahadeł.
Wynik rejestracji nale
ż
y zapisa
ć
nadaj
ą
c nazw
ę
folderów i plików wg schematu
wyja
ś
nionego wy
ż
ej. Zapisany plik b
ę
dzie podstaw
ą
do dalszych oblicze
ń
. Zapisany
plik z wynikami w postaci tekstowej mo
ż
e zosta
ć
łatwo otwarty za pomoc
ą
takich
programów jak: Notatnik, Excel, Word, Matlab, Statistica itp. Pami
ę
taj aby
niezale
ż
nie zanotowa
ć
w arkuszu pomiarowym parametry rejestracji sygnału
(cz
ę
stotliwo
ść
próbkowania i liczb
ę
próbek).
Rejestracje nale
ż
y powtórzy
ć
dla zadanych (patrz arkusz sprawozdania)
warto
ś
ci k
ą
tów wychyle
ń
pocz
ą
tkowych bijaka.
Wybór trybu rejestracji
zderzenia w celu
wyznaczenia wsp. R
wer. 2014 MT
14
Z2. Oszacowanie niepewno
ś
ci pomiarowej
Pomiary wst
ę
pne
Mierz
ą
c wielko
ś
ci geometryczne i okre
ś
laj
ą
mas
ę
notuj w arkuszu
sprawozdania niepewno
ść
pomiaru. Przyjmij,
ż
e w przypadku pomiaru suwmiark
ą
,
ż
e
wynosi ona ±0,1 mm. W przypadku pomiary masy przyjmij niepewno
ść
±1 g.
Warto
ść
niepewno
ś
ci pomiaru Q(x,... z) otrzymanego metod
ą
po
ś
redni
ą
, przy
zało
ż
eniu,
ż
e niepewno
ś
ci poszczególnych pomiarów s
ą
niezale
ż
ne i losowe, mo
ż
e
zosta
ć
obliczona ze wzoru:
2
2
)
,...
(
...
)
,...
(
∆
∂
∂
+
+
∆
∂
∂
=
∆
z
z
z
x
Q
x
x
z
x
Q
Q
(Z2)
gdzie:
∆
Q jest szacowan
ą
niepewno
ś
ci
ą
wielko
ś
ci mierzonej metod
ą
po
ś
redni
ą
,
∆
x ...
∆
z niepewno
ś
ciami wielo
ś
ci mierzonych bezpo
ś
rednio/po
ś
rednio, od których zale
ż
y
wielko
ść
Q.
Oszacowanie poło
ż
enia
ś
rodka masy wyznaczamy ze wzoru:
∑
∑
=
=
=
N
i
i
N
i
i
i
c
V
V
h
h
1
1
(Z3)
Bior
ą
c pod uwag
ę
,
ż
e wahadła mo
ż
na zamodelowa
ć
jako zło
ż
enie dwóch brył
(pr
ę
ta i walca lub kuli) mo
ż
emy zapisa
ć
:
2
1
2
2
1
1
V
V
V
h
V
h
h
c
+
+
=
.
(Z4)
St
ą
d:
2
2
2
2
1
1
2
2
2
2
1
1
∆
∂
∂
+
∆
∂
∂
+
∆
∂
∂
+
∆
∂
∂
=
∆
V
V
h
V
V
h
h
h
h
h
h
h
h
c
c
c
c
c
(Z5)
Bior
ą
c pod uwag
ę
,
ż
e mamy tutaj do czynienia z oszacowaniem niepewno
ś
ci, nie
jest wymagane bardzo dokładne jej obliczenie. Okazuje si
ę
(co łatwo sprawdzi
ć
),
ż
e
dla rozpatrywanego zestawu wahadeł istotny jest w zasadzie tylko jeden składnik
powy
ż
szej sumy zwi
ą
zany z niepewno
ś
ci
ą
wyznaczenia obj
ę
to
ś
ci kuli lub walca
bijaka lub wahadła uderzanego (reszta jest innego rz
ę
du wielko
ś
ci). Po podstawieniu
warto
ś
ci niepewno
ś
ci oszacowania
ś
rodka masy dla wszystkich wahadeł s
ą
rz
ę
du (w
przybli
ż
eniu) ±1 mm i tak
ą
warto
ść
nale
ż
y przyj
ąć
w dalszych analizach. Z tak
ą
niepewno
ś
ci
ą
nale
ż
y te
ż
wyrazi
ć
ostateczne poło
ż
enie
ś
rodków masy.
Pomiary okresu waha
ń
Od wyboru parametrów akwizycji zale
ż
y niepewno
ść
pomiarowa uzyskanego
okresu. Pomiar okresu waha
ń
odbywa si
ę
za pomoc
ą
transformaty Fouriera z
dziedziny czasu w dziedzin
ę
cz
ę
stotliwo
ś
ci. Rzutuje to na sposób wyznaczania
niepewno
ś
ci
pomiarowej
uzyskanego
okresu.
Rozdzielczo
ść
df
pomiaru
cz
ę
stotliwo
ś
ci waha
ń
wahadła mo
ż
e by
ć
przedstawiona jako:
wer. 2014 MT
15
]
[
1
Hz
T
df
r
=
.
(Z6)
gdzie T
r
czas rejestracji.
Je
ś
li oznaczymy cz
ę
stotliwo
ść
ruchu wahadła przez f
o
[Hz] a odpowiadaj
ą
cy mu
okres jego waha
ń
jako T
o
mo
ż
emy zapisa
ć
:
]
[
1
s
f
T
o
o
=
.
(Z7)
Wobec powy
ż
szego niepewno
ść
pomiaru okresu mo
ż
e by
ć
wyznaczona jako (patrz
wzór Z2):
N
fpT
Nf
fp
df
f
f
f
T
T
o
o
o
o
o
o
2
2
0
2
1
=
=
=
∆
∂
∂
=
∆
[s].
(Z8)
Podstawiaj
ą
c odpowiednie warto
ś
ci (okresy wahadeł s
ą
zbli
ż
one) mo
ż
na oszacowa
ć
powy
ż
sz
ą
niepewno
ść
jako ± 0,01s. Tak
ą
warto
ść
nale
ż
y przyj
ąć
dla ka
ż
dego z
rozpatrywanych wahadeł.
Okre
ś
lenie momentu bezwładno
ś
ci
Aby wyznaczy
ć
niepewno
ść
pomiaru momentów bezwładno
ś
ci nale
ż
y skorzysta
ć
ze
wzoru ogólnego (Z2) z zał
ą
cznika i niepewno
ś
ci obliczonych/przyj
ę
tych wcze
ś
niej.
Przyspieszenie ziemskie przyjmij jako 9,807 ± 0,001 m/s
2
. Do dalszych działa
ń
przyjmij warto
ś
ci momentu bezwładno
ś
ci wyra
ż
one za pomoc
ą
trzech cyfr
znacz
ą
cych.
Pomiary k
ą
tów wychyle
ń
Przyjmij niepewno
ś
ci pomiaru k
ą
tów
α
o
i
α
max
wynosz
ą
c
ą
±0,1
o
.
Okre
ś
lenie niepewno
ś
ci pr
ę
dko
ś
ci k
ą
towych
Skorzystaj ze wzoru Z2 i niepewno
ś
ci obliczonych wcze
ś
niej. Przy uwzgl
ę
dnianiu
niepewno
ś
ci pomiaru k
ą
ta pami
ę
taj o zamianie stopni na radiany.
Okre
ś
lenie współczynnika restytucji
Dla ka
ż
dego k
ą
ta pocz
ą
tkowego okre
ś
l współczynnik restytucji oraz
niepewno
ść
jego pomiaru (korzystaj
ą
c z wzoru Z2). Nast
ę
pne okre
ś
l
ś
redni
ą
warto
ść
współczynnika restytucji uwzgl
ę
dniaj
ą
c ró
ż
ne niepewno
ś
ci jego pomiaru.
Pomiary obarczone wi
ę
ksza niepewno
ś
ci
ą
powinny mie
ć
mniejszy wpływ na
ostateczny wynik ni
ż
pomiary okre
ś
lone z mniejsza niepewno
ś
ci
ą
. W tym celu
zastosuj oszacowanie R za pomoc
ą
ś
redniej wa
ż
onej:
∑
∑
=
i
i
i
sr
w
R
w
R
wer. 2014 MT
16
gdzie waga pomiaru i jest równa: 1/
∆
R
2
i
,
∆
R
i
niepewno
ś
ci
ą
oszacowania
współczynnika restytucji o indeksie i oraz R
i
jego warto
ś
ci
ą
.
Ostateczn
ą
niepewno
ść
pomiaru
ś
redniego współczynnika restytucji oszacuj za
pomoc
ą
wzoru:
∑
=
∆
i
sr
w
R
1
Uwaga!
Rysunek R(
ω
1
) powinien uwzgl
ę
dnia
ć
słupki bł
ę
du.
Okre
ś
lenie impulsu siły i
ś
redniej warto
ś
ci siły
Niepewno
ść
impulsu siły S
1
i S
2
okre
ś
l za pomoc
ą
wzoru Z2. Podobnie
wykonaj obliczenia dla
ś
rednich warto
ś
ci sił.
Uwaga!
Rysunek F
1
(
ω
1
) i F
2
(
ω
1
) powinien uwzgl
ę
dnia
ć
słupki bł
ę
du.
Wyszukiwarka
Podobne podstrony:
CW4 INSTv2
CW4 INSTv2
cw4 Zespół Klinefeltera
OS gr03 cw4 id 340946 Nieznany
cw4 badanie drgan skretnych
crossgosp, Skrypty, UR - materiały ze studiów, studia, studia, Bastek, Studia, Rok 3, SEMESTR V, Woi
postępowanie cywilne-ćw4, pomoce naukowe ;), Postępowanie cywilne
PTK cw4, WAT, SEMESTR II, PTK
ćw4 8 11
cw4 protokol
cw4 telex cz1 id 123468 Nieznany
cw4
inventor cw4 zespol
Cw4 tow
CW4 doc
Makroekonomia cw4
więcej podobnych podstron