POLITECHNIKA GDAŃSKA
WYDZIAŁ ELEKTROTECHNIKI I AUTOMATYKI
KATEDRA ENERGOELEKTRONIKI I MASZYN ELEKTRYCZNYCH
LABORATORIUM
M A S Z Y N Y E L E K T R Y C Z N E
ĆWICZENIE (MI)
MASZYNY INDUKCYJNE/ASYNCHRONICZNE TRÓJFAZOWE
BADANIE CHARAKTERYSTYK:
BIEGU JAŁOWEGO i ZWARCIA
Materiały pomocnicze
Kierunek Elektrotechnika
Studia stacjonarne 1-szego stopnia
semestr 3
Opracował
Mieczysław Ronkowski
Grzegorz
Kostro
Michał Michna
Gdańsk 2011-2012
M. Ronkowski, G. Kostro, M. Michna:
2
ĆWICZENIE (MI)
MASZYNY INDUKCYJNE/ASYNCHRONICZNE TRÓJFAZOWE
BADANIE CHARAKTERYSTYK: BIEGU JAŁOWEGO i ZWARCIA
Program ćwiczenia
• Pomiar rezystancji uzwojeń.
• Pomiar charakterystyki biegu jałowego.
• Pomiar charakterystyki stanu zwarcia (wirnik nieruchomy).
1.
TEORIA
1.1. Budowa, działanie i model fizyczny maszyny indukcyjnej
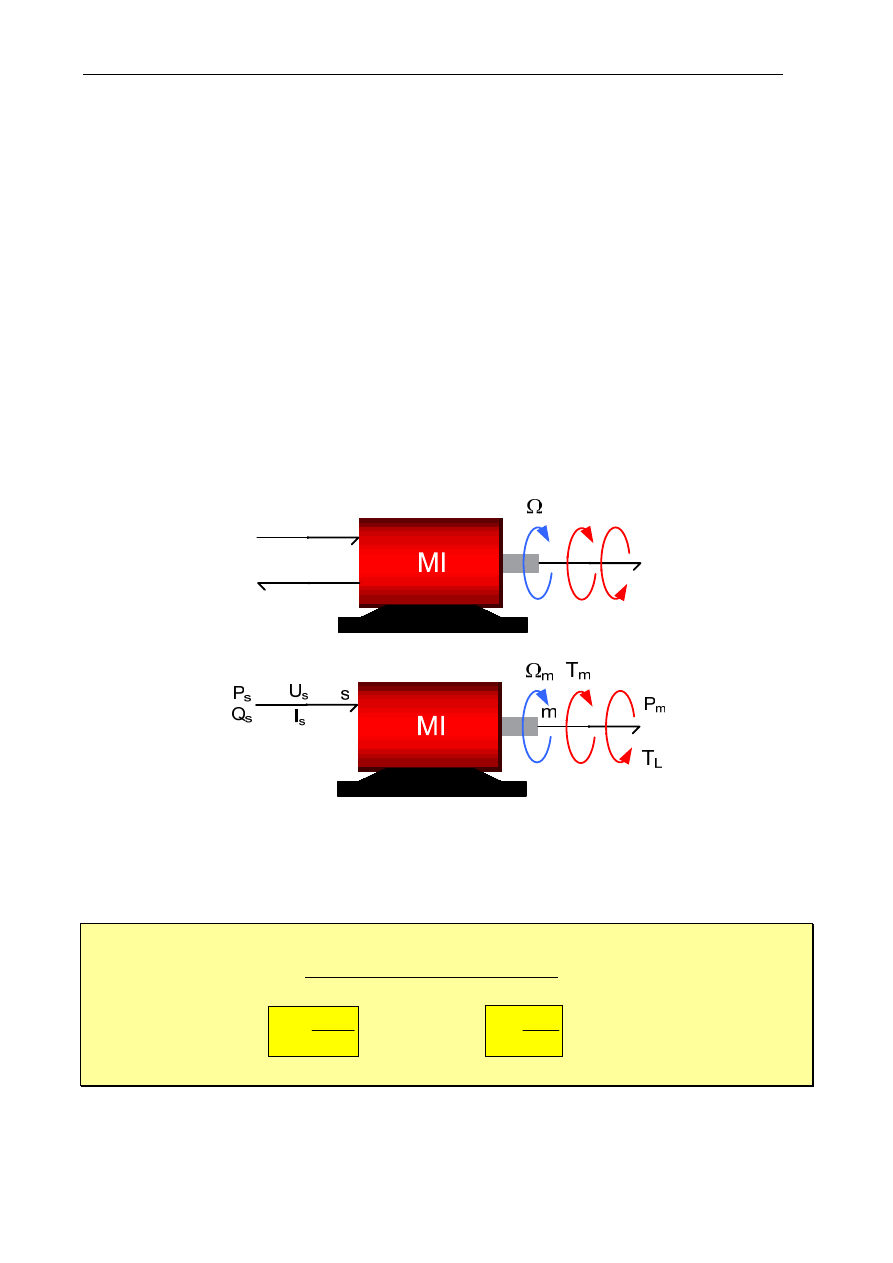
Maszyna indukcyjna/asynchroniczna (MI) jest przetwornikiem elektromechanicznym (rys. 1.1) o
trzech wrotach, które fizycznie reprezentują: „wejścia elektryczne” – zaciski uzwojenia stojana „s”;
„wyjścia/wejścia elektryczne” – zaciski uzwojenia wirnika „r”; „wyjście/wejście mechaniczne” – koniec
wału (sprzęgło) „m”. Moc elektryczna (dostarczana) P
s
i moc mechaniczna (odbierana) P
m
ulegają
przemianie elektromechanicznej za pośrednictwem pola magnetycznego. Energia pola magnetycznego jest
energią wewnętrzną maszyny, gdyż przetwornik nie ma możliwości wymiany tej energii z otoczeniem.
a)
T
m
m
P
s
P
r
P
m
s
r
m
Q
s
Q
r
T
L
U
s
I
s
U
s
I
s
b)
Rys. 1.1. Maszyna indukcyjna/asynchroniczna (strzałkowanie dla pracy silnikowej):
a) trójwrotowy przetwornik elektromechaniczny z wirnikiem pierścieniowym
b) dwuwrotowy przetwornik elektromechaniczny z wirnikiem klatkowym
wrota (zaciski) obwodu stojana „s” – dopływ energii elektrycznej przetwarzanej ma energię mechaniczną, wrota
obwodu wirnika „r” – odpływ energii do odbiornika lub sieci zasilającej,
wrota układu (obwodu) mechanicznego „m” – odpływ energii mechanicznej
Uwaga:
Działanie maszyny indukcyjnej/asynchronicznej oparte jest na wykorzystaniu idei pola o wirującym
strumieniu magnetycznym, wzbudzanym metodą elektromagnetyczną.
Prędkość wirowania pola wzbudnika/induktora określona jest wzorem:
p
f
e
s
2
π
Ω
=
[rad/s]
lub
p
f
n
e
s
60
=
[obr/min]
gdzie: f
e
– częstotliwość napięcia zasilania silnika, p – liczba par biegunów.
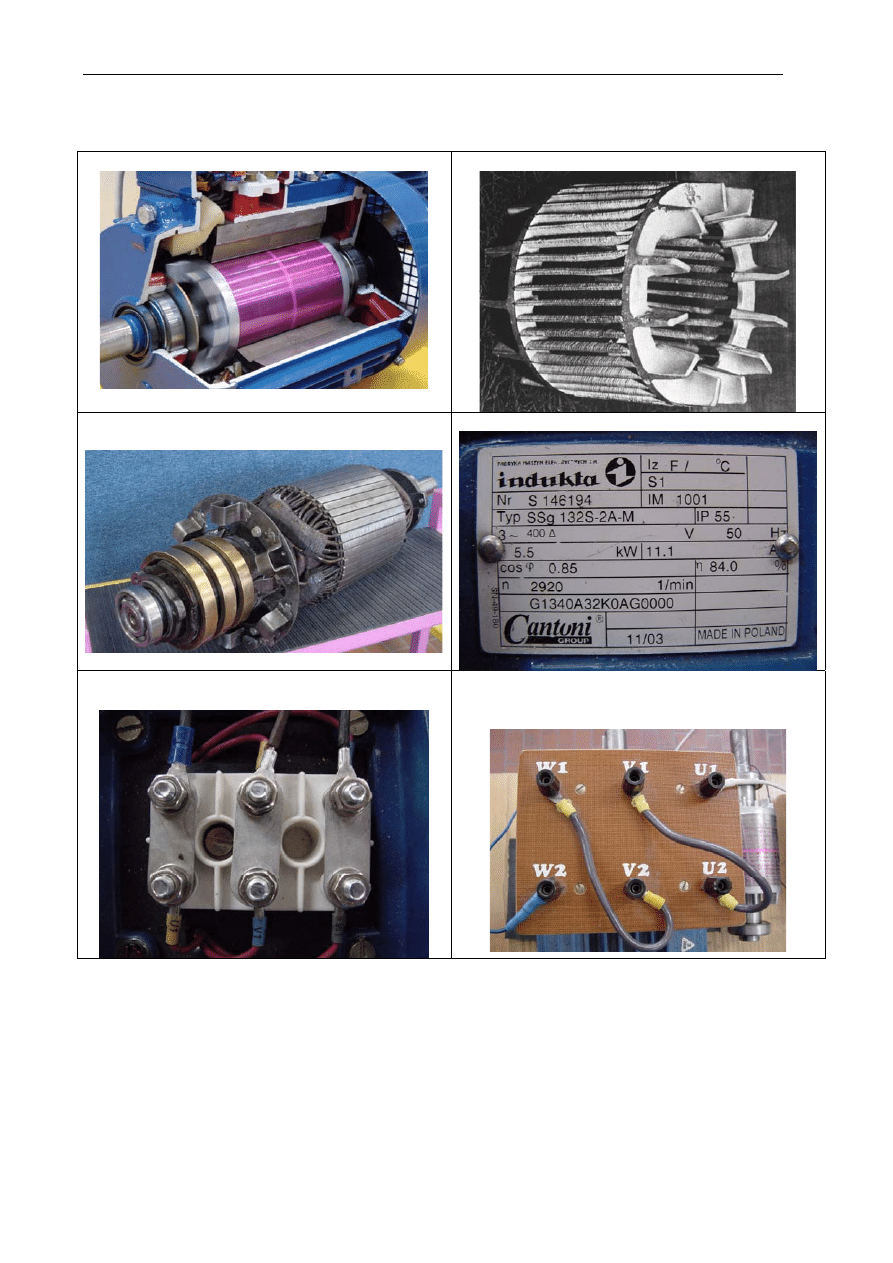
Budowę i podstawowe elementy MI przedstawiono na rys. 1.2. Maszyna składa się z następujących
elementów czynnych: stojana (rdzeń i uzwojenie 3-fazowe); wirnika (rdzeń i uzwojenie klatkowe lub
uzwojenie pierścieniowe – uzwojenie 3-fazowe połączone z pierścieniami ślizgowymi); wału. Stojan pełni
funkcję wzbudnika-induktora – prądy płynące w uzwojeniu stojana wzbudzają pole o wirującym strumieniu
Ćwiczenie: Maszyny indukcyjne trójfazowe
3
magnetycznym, który indukuje SEM w uzwojeniu wirnika. Natomiast wirniki pełni, w pewnym sensie,
funkcję twornika – indukowana w uzwojeniu wirnika SEM wymusza przepływ prądu, który oddziaływując z
polem stojana generuje moment elektromagnetyczny.
a) silnik indukcyjny klatkowy
b) uzwojenie wirnika – klatkowe (bez rdzenia)
c) uzwojenie wirnika – pierścieniowe (z rdzeniem)
d) tabliczka znamionowa silnika klatkowego
e) fabryczna tabliczka zaciskowa 3-fazowego
uzwojenia stojana połączonego w trójkąt (
Δ)
f) laboratoryjna tabliczka zaciskowa 3-fazowego
uzwojenia stojana połączonego w trójkąt (
Δ)
Rys. 1.2. Budowa i podstawowe elementy maszyny indukcyjnej/asynchronicznej
(produkcja firmy INDUKTA/CANTONI)
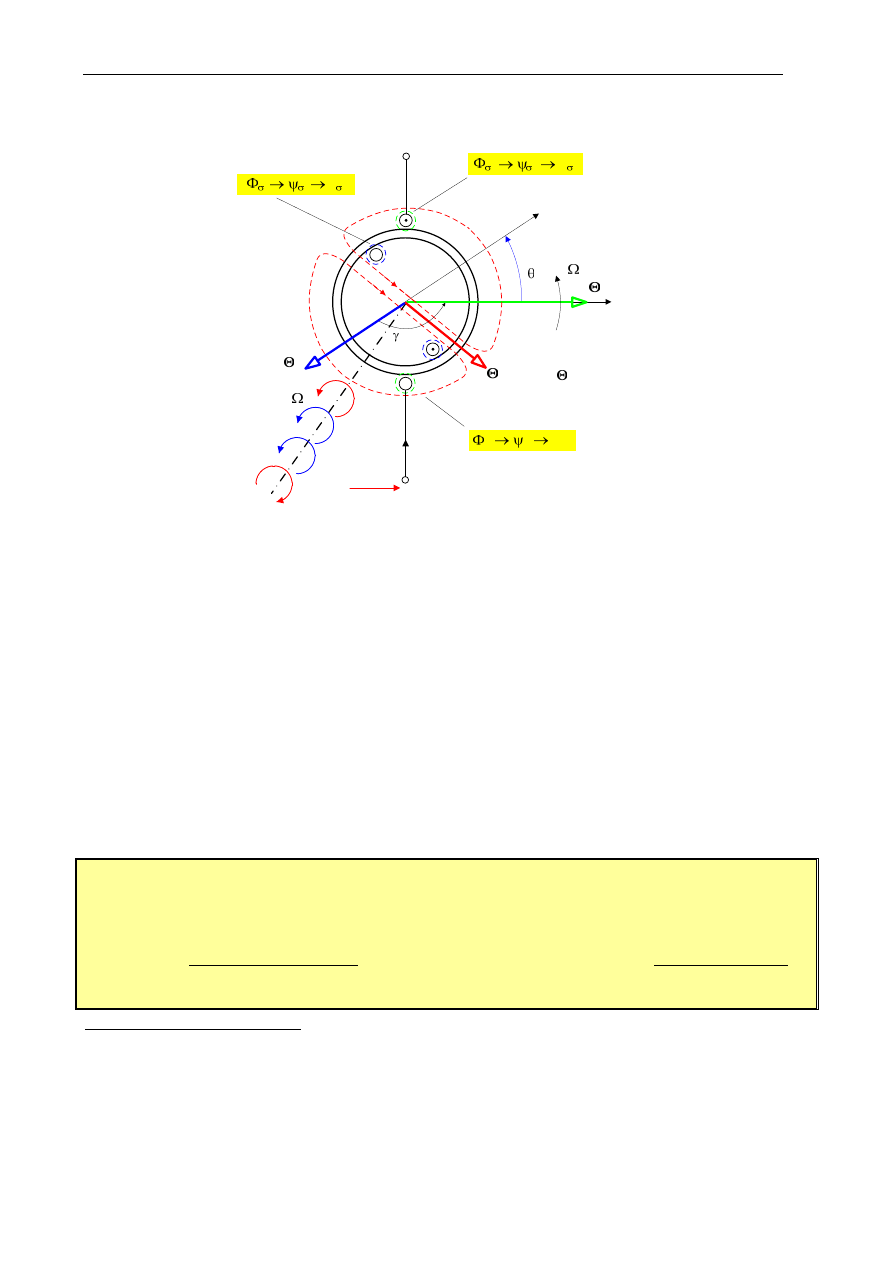
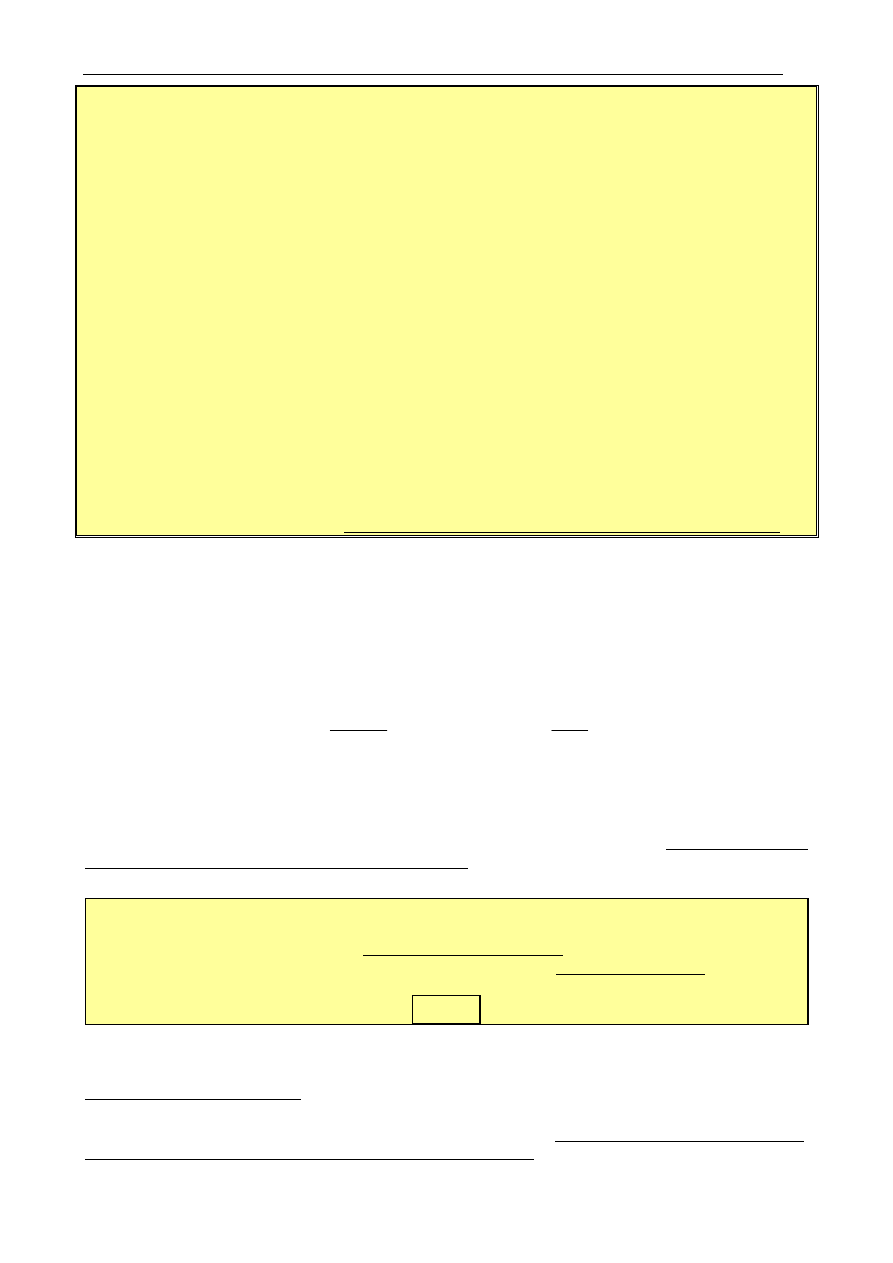
Na podstawowy model fizyczny silnika indukcyjnego pierścieniowego — pokazany na rys. 1.3 —
składają się: a) elementy czynne: wzbudnik-induktor (stojan), twornik (wirnik), wał; b) wielkości (zmienne)
fizyczne: napięcia fazowe U
s
na zaciskach uzwojeń, prądy fazowe I
s
oraz I
r
płynące w uzwojeniach, wirujący
z prędkością
Ω
s
strumień magnesujący (główny)
Φ
m
, strumienie rozproszenia uzwojeń
Φ
σ
s
oraz
Φ
σ
r
, moment
elektromagnetyczny (wewnętrzny) T
e
, moment obrotowy (zewnętrzny) T
m
, prędkość kątowa wirnika
Ω
m
,
moment obciążenia T
L
, straty w żelazie
Δ
P
Fe
, straty w uzwojeniach
Δ
P
Cus
oraz
Δ
P
Cur
, straty mechaniczne
(tarcia, wentylacyjne)
Δ
P
m
.
M. Ronkowski, G. Kostro, M. Michna:
4
Aby zachować czytelność rysunku rys. 1.3, układ uzwojeń fazowych (pasm) stojana i wirnika
zaznaczono szkicowo tylko dla jednej fazy obwodami as-as' oraz ar-ar', przy czym litery as, ar oznaczają
umowne początki tych uzwojeń, a litery as', ar' — umowne końce
1)
.
as'
as
r
oś fazy as
oś fazy ar
s
s
L
s
ar
ar'
m
m
L
ms
r
r
L
r
T
e
T
L
m
s
+
+
i
as
u
as
+
_
s
m
r
0
lub
T
m
Rys. 1.3. Podstawowy model fizyczny wielofazowego silnika indukcyjnego pierścieniowego (liczba par biegunów p = 1)
Symetryczne prądy trójfazowe, płynące w uzwojeniach stojana, wytwarzają odpowiednio fazowe
(osiowe) przepływy pulsujące (siły magnetomotoryczne), które są skierowane zgodnie z osiami
magnetycznymi tych uzwojeń: np. oś magnetyczna as dla przepływu uzwojenia stojana as - as’. Osie
magnetyczne pozostałych faz są odpowiednio przesunięte w przestrzeni o kąt 2
π/3p (p - liczba par
biegunów).
Sumowanie geometryczne osiowych przepływów pulsujących stojana wywołuje w efekcie wirującą w
przestrzeni falę przepływu. Pierwsza harmoniczna tej fali – odwzorowana wektorem (fazorem
przestrzennym)
Θ
s
– wiruje w przestrzeni względem obserwatora na stojanie z prędkością kątową
Ω
s
= 2
π
f
e
/p (f
e
– częstotliwość napięcia zasilania uzwojeń stojana). Prędkość ta nazywaną jest zwykle prędkością
synchroniczną.
Wirujący przepływ stojana
Θ
s
wzbudza wirujący strumień, który przecinając przewody (pręty)
uzwojenia wirnika, indukuje w nich przemienne SEM rotacji, które wymuszają przy zamkniętym uzwojeniu
wirnika prądy fazowe. Prądy wirnika wytwarzają odpowiednio fazowe (osiowe) przepływy pulsujące.
Analogicznie jak w stojanie, sumowanie geometryczne osiowych przepływów pulsujących wirnika
wywołuje w efekcie wirującą w przestrzeni falę przepływu. Pierwszą harmoniczną tej fali odwzorowuje
wektor (fazor przestrzenny)
Θ
r
, wirujący z prędkością
Ω
s
= 2
π
f
e
względem obserwatora na stojanie.
Uwaga:
Interakcja wirujących pól magnetycznych stojana i wirnika, wzbudzanych przepływami
Θ
s
oraz
Θ
r
, generuje
moment elektromagnetyczny T
e
, który wymusza ruch obrotowy wirnika.
Należy zauważyć, że interakcja obu pól wynika z tendencji układu elektromagnetycznego stojana i wirnika
do wzbudzenia ekstremalnego strumienia, innymi słowy z tendencji do zgromadzenia ekstremalnej energii w
układzie (zasada minimalnej pracy – minimalnego działania).
Zatem wektory reprezentujące przepływy
Θ
s
oraz
Θ
r
będą dążyły do wzajemnego złożenia (pokrycia) się.
1) Zarówno uzwojenia stojana jak i wirnika są równomiernie rozmieszczone w żłobkach.
Uzwojenia stojana MI stanowią: trzy fazy (pasma) — osie magnetyczne poszczególnych faz są odpowiednio
względem siebie przesunięte w przestrzeni o kąt 120
0
(dla MI o liczbie par biegunów p>1 kąt wynosi 120
o
/p).
Analogicznie jest dla uzwojenia wirnika w wykonaniu pierścieniowym. W przypadku uzwojenia wirnika w
wykonaniu pierścieniowym liczba faz jest równa liczbie prętów klatki.
W opisie modelu MI, ze względów dydaktycznych, zastoswano oznaczenia: as-as’, bs-bs’, cs-cs’ dla stojana, ar-
ar’, br-br’, cr-cr’ dla wirnika, zamiast znormalizowanych: 1U1-1U2, 1V1-1V2, 1W1-1W2 dla stojana, 2U1-2U2,
2V1-2V2, 2W1-2W2 dla wirnika. Oznaczenia znormalizowane zastosowano na schematach układów pomiarowych.
Ćwiczenie: Maszyny indukcyjne trójfazowe
5
Możliwy jest tylko obrót wektora przepływu wirnika
Θ
r
w kierunku zgodnym z założonym na rys. 1.3
dodatnim zwrotem prędkości kątowej wirnika
Ω
m
(dla przyjętej konwencji odbiornikowej strzałkowania,
oznacza to zgodny zwrot momentu i prędkości – odpowiada to pracy silnikowej).
Przepływ wirnika
Θ
r
wiruje w przestrzeni względem obserwatora na wirniku z prędkością kątową równą
różnicy prędkości (
Ω
s
-
Ω
m
) — nazywaną zwykle bezwzględną prędkością poślizgu; natomiast względem
obserwatora na stojanie wiruję z prędkością kątową równą sumie prędkości: (
Ω
s
-
Ω
m
) +
Ω
m
=
Ω
s
.
To znaczy, że do prędkości poślizgu (
Ω
s
-
Ω
m
) należy dodać prędkość unoszenia przepływu wirnika
Θ
r
,
równą prędkości mechanicznej wirnika
Ω
m
.
Zatem przepływ wirnika
Θ
r
wiruje w przestrzeni względem obserwatora na stojanie z prędkością
kątową równą prędkości
Ω
s
.
Dla stanu ustalonego (brak składowych swobodnych) pracy silnika oznacza to, że przepływy stojana
Θ
s
i wirnika
Θ
r
, wirują synchronicznie
2)
.
W efekcie przepływy stojana
Θ
s
i wirnika
Θ
r
tworzą wspólny (wypadkowy) przepływ – nazywany zwykle
przepływem magnesującym, określonym sumą geometryczną:
Θ
s
+
Θ
r
=
Θ
m
(1.1)
Przepływ
Θ
s
wiruje z prędkością
Ω
s
(przy prędkości wirnika
Ω
m
≠ Ω
s
) i wzbudza strumień magnesujący
(główny)
Φ
m
.
Ze względu na ruch asynchroniczny strumienia
Φ
m
oraz rdzenia wirnika, maszyny indukcyjne nazywane są
także maszynami asynchronicznymi. Jest to zasadnicza cecha maszyn indukcyjnych/asynchronicznych.
Moment elektromagnetyczny T
e
zależy od kąta
γ (zwanego kątem momentu) między przepływami Θ
s
oraz
Θ
r
. Na rys. 1.3 pokazano schematycznie wzajemne, przestrzenne położenie kątowe osi fazy as-as’
uzwojenia stojana względem osi fazy ar-ar’ uzwojenia wirnika. Położenie to odpowiada chwili czasowej dla
której wartości prądów tych faz osiągają jednocześnie wartości maksymalne. Oznacza to, zgodnie z teorią
pola wirującego, że położenie wektorów wirujących przepływów stojana
Θ
s
i wirnika
Θ
r
jest zgodne z
osiami magnetycznymi fazy as-as’ i fazy ar-ar’.
W teorii maszyn indukcyjnych bezwzględną wartość prędkości poślizgu (
Ω
s
-
Ω
m
) odnosi się do
prędkości wirującego pola stojana, którą nazywa się poślizgiem względnym, albo po prostu poślizgiem:
s
s
m
s
=
−
Ω Ω
Ω
lub
s
ns n
ns
=
−
(1.2)
gdzie: n
s
oraz n – odpowiednio prędkość synchroniczna pola stojana i wirnika (mechaniczna) w
obr/min.
Tworzenie wspólnego przepływu magnesującego jest zjawiskiem analogicznym do magnesowania
transformatora (opisanego w ćw. Badanie transformatora), tzn. powstawania prądu magnesującego
wynikającego z sumy geometrycznej przepływu uzwojenia pierwotnego i wtórnego (uwaga: w przypadku
transformatora są to przepływy nieruchome w przestrzeni). Analogię tą wykorzystuje się w budowie modelu
obwodowego (schematu zastępczego) maszyny indukcyjnej.
Uwaga:
Analogia między transformatorem i MI dotyczy tylko tworzenia wspólnego przepływu magnesującego. W
transformatorze prąd pierwotny i wtórny mają jednakową częstotliwość. Natomiast w MI, przy stałej
częstotliwości prądu stojana (pierwotnego), prąd wirnika (wtórny) ma częstotliwość zmienną, która zależy
od prędkości poślizgu (obciążenia).
e
r
f
s
f
=
2)
Jest to podstawowy warunek generacji momentu o stałym kierunku i zwrocie — momentu o średniej wartości różnej
od zera. Zgodnie z zasadą pracy (prawem sterowania) maszyn elektrycznych: maszyna elektryczna jest układem dwóch
pól magnetycznych o osiach nieruchomych względem siebie w przestrzeni. Poszczególne typy maszyn elektrycznych
różnią się tylko sposobem sterowania położeniem tych pól.
M. Ronkowski, G. Kostro, M. Michna:
6
1.2. Model obwodowy (schemat zastępczy) maszyny indukcyjnej
Model obwodowy (schemat zastępczy) silnika indukcyjnego – przedstawiony na rys. 1.4 – opracowano
na podstawie modelu fizycznego silnika (rys. 1.3). Model ten jest podstawą do analizy dowolnego stanu
pracy silnika indukcyjnego.
I
m
E
s
U'
2
= 0
U
s
I
0
I
0cz
R
Fe
X
m
I
s
I'
r
R'
r
R
s
X
σs
X'
σr0
Φ'
σr
Φ
σs
Φ
m
E
σs
E’
σr0
R
m
= R'
r
(1-s)/s
E’
r0
P
m
s
s
f
e
f
e
Analogiem modelu obwodowego MI jest model obwodowy
Analogiem modelu obwodowego MI jest model obwodowy
transformatora obci
transformatora obci
ąż
ąż
onego rezystancj
onego rezystancj
ą
ą
:
:
R
R
’
’
r
r
(1
(1
-
-
s)/s
s)/s
2
)
1
(
r
r
r
m
I
s
s
R
m
P
′
−
′
=
Moc pola wiruj
Moc pola wiruj
ą
ą
cego
cego
P
P
e
e
i mechaniczna P
i mechaniczna P
m
m
wytwarzana przez MI pracuj
wytwarzana przez MI pracuj
ą
ą
c
c
ą
ą
jako silnik:
jako silnik:
2
1
r
r
r
e
I
s
R
m
P
′
′
=
P
P
e
e
Rys. 1.4. Podstawowy model obwodowy (schemat zastępczy) wielofazowego silnika indukcyjnego
Uwaga:
Aby
posłużyć się modelem obwodowym transformatora, do opisu właściwości ruchowych MI,
należy częstotliwość prądów wirnika s f
e
transformować do częstotliwości prądów stojana f
e
.
Efektem transformacji jest pojawienie się rezystancji
s
s
R
R
r
m
/
)
(
−
′
=
′
1
.
Moc
wydzielająca się na rezystancji
s
s
R
R
r
m
/
)
(
−
′
=
′
1
jest analogiem mocy mechanicznej
wytwarzanej przez silnik.
Przedstawiony model — nazywany zwykle modelem o konturze „T” — odpowiada silnikowi
indukcyjnemu o uzwojeniu wirnika sprowadzonym (zredukowanym) zarówno do przekładni
ϑ
i
= 1
jaki i
transformowanym do częstotliwości prądów stojana. Topologia i elementy modelu wynikają z rozważań
fizycznych dotyczących biegu jałowego, stanu obciążenia i stanu zwarcia silnika indukcyjnego. Z kolei
wartości parametrów modelu wyznacza się na podstawie wyników dwóch prób: biegu jałowego i stanu
zwarcia — opisanych w p. 2.3 oraz 2.5 niniejszego ćwiczenia.
Parametru modelu obwodowego silnika indukcyjnego:
rezystancja R
Fe
i reaktancja X
m
są wielkościami nieliniowymi
zależnymi od wartości strumienia głównego i rodzaju blachy rdzenia
pozostałe parametry modelu obwodowego w zakresie prądów znamionowych
można przyjąć jako stałe.
Uwaga: W przypadku wartości prądów silnika w stanie rozruch [I
sr
> (5 ÷ 7) I
sn
] drogi przepływu
strumieni rozproszenia ulegają nasyceniu – wartości reaktancji rozproszenia ulegają zmniejszeniu.
W przypadku silnika klatkowego z klatką rozruchową lub głębokimi żłobkami należy uwzględnić
zjawisko wypierania prądu – wartości reaktancji i rezystancji uzwojenia ulegają zmianie wraz ze zmianą
poślizgu.
Ćwiczenie: Maszyny indukcyjne trójfazowe
7
1.3. Charakterystyka mechaniczna maszyny indukcyjnej
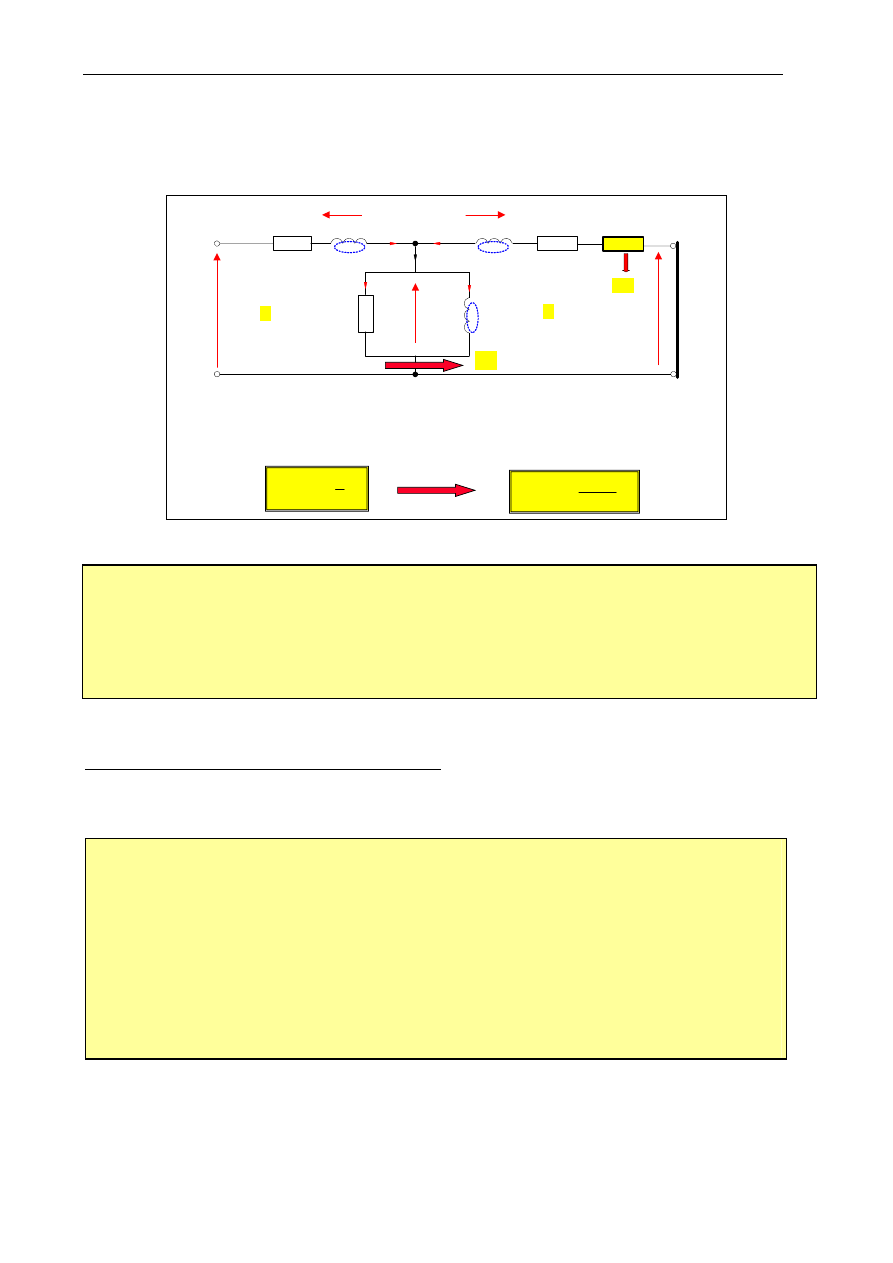
Model obwodowy SI na rys. 1.4, przy założeniu U
s
≅ E
s
, można przekształcić do modelu obwodowego
o konturze „Γ” (rys. 1.5).
2
2
z
r
s
s
s
r
X
s
R
R
U
I
+
′
+
≅
)
/
(
'
2
2
2
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
+
+
′
≅
z
r
s
s
r
s
e
e
X
s
R
R
U
s
R
m
p
T
)
/
(
1
'
ω
e
e
e
P
p
T
ω
=
OBLICZANIE PRĄDU WIRNIKA I MOMENTU ELEKTROMAGNETYCZNEGO
Rys. 1.5. Model obwodowy (schemat zastępczy) wielofazowego silnika indukcyjnego o konturze „
Γ”
Przyjmując kolejne uproszczenie: R
s
≅ 0 równanie momentu elektromagnetycznego (na rys. 1.5) można
uprościć do postaci:
2
2
2
k
k
z
e
s
s
e
s
s
s
s
X
U
pm
T
+
≅
ω
(1.3)
gdzie,
/
z
r
k
X
R
s
′
=
jest tzw. poślizgiem krytycznym – poślizgiem dla którego moment
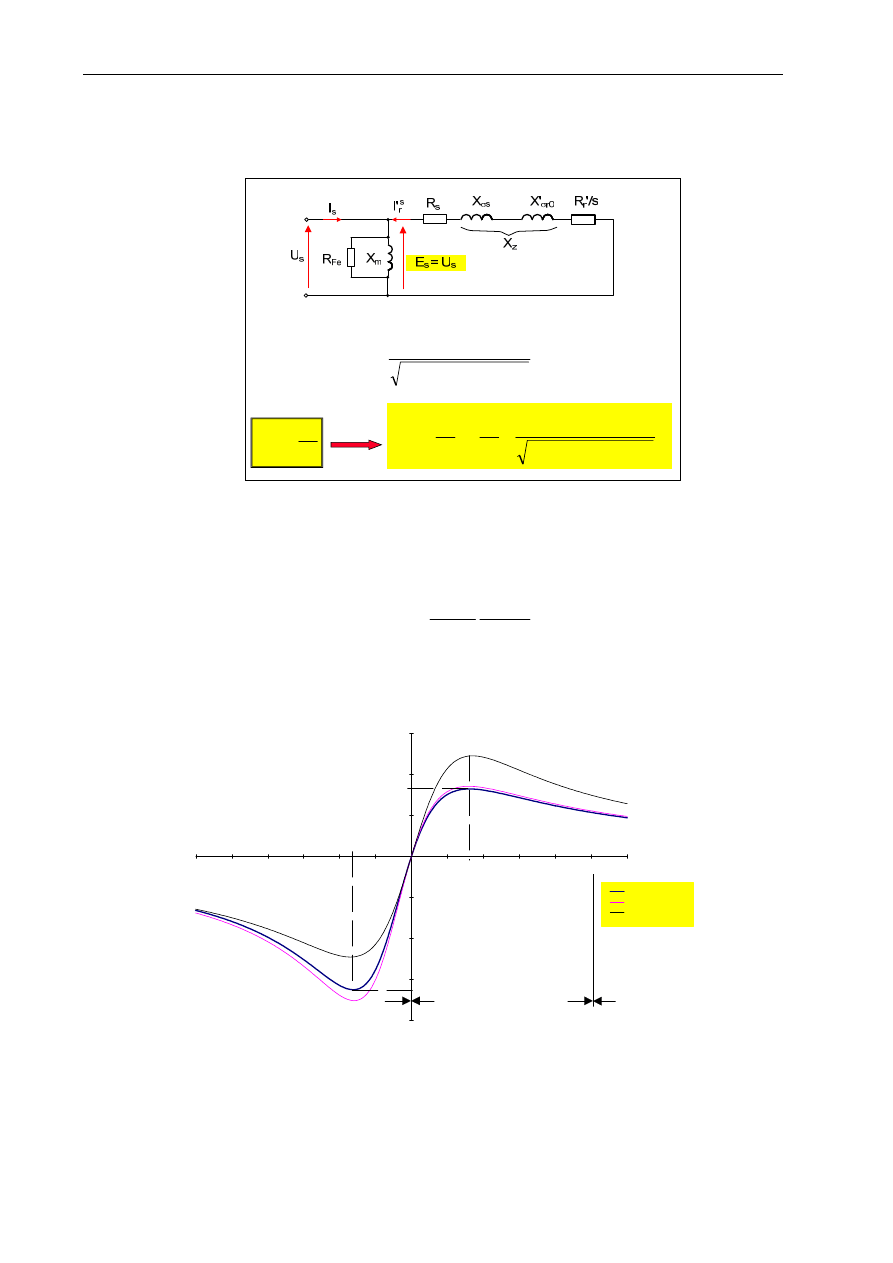
elektromagnetyczny osiąga wartość maksymalną. Przykładowy wykres charakterystyki mechanicznej SI,
wykreślonej wg równania (1.3), przedstawiono rys. 1.6.
-80
-60
-40
-20
0
20
40
60
-1.2
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
1.2
model "T"
model " "
model " " R = 0
SILNIK
PRĄDNICA
HAMULEC
s
k+
s
k-
emx
+T
T
e
s [-]
[Nm]
Γ
Γ
emx
-T
s
Rys. 1.6. Przykładowa charakterystyka mechaniczna wielofazowego silnika indukcyjnego – charakterystyki wykreślone
na podstawie modelu obwodowego o konturze „T”, „
Γ”oraz „Γ” przy założeniu R
s
= 0 (wg równania (1.3))
M. Ronkowski, G. Kostro, M. Michna:
8
2.
BADANIA
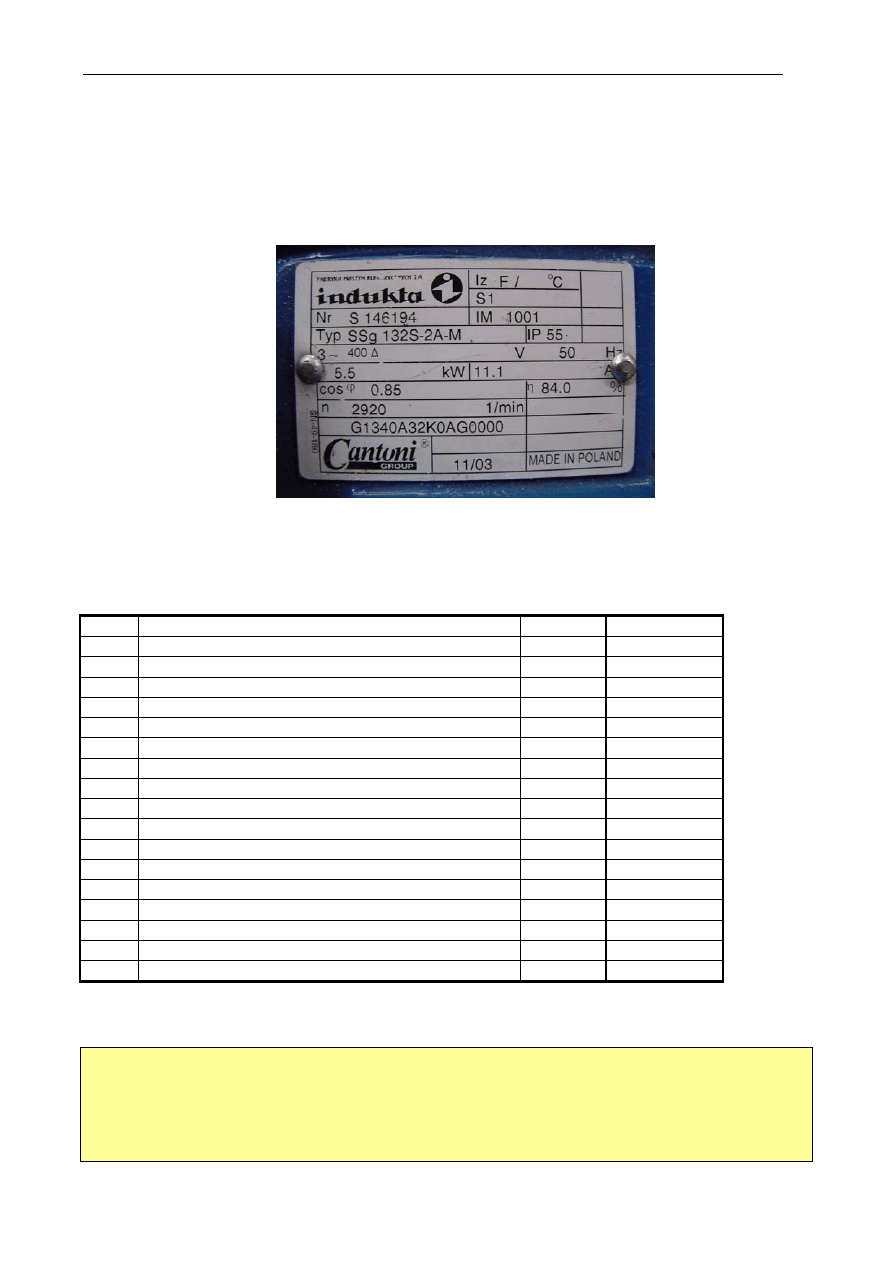
2.1. Oględziny zewnętrzne
Należy dokonać oględzin badanego silnika indukcyjnego oraz urządzeń wchodzących w skład układu
pomiarowego. Ustalić i sprawdzić urządzenie do zahamowania wirnika. Dokładnie przeczytać i zanotować
dane zawarte na tabliczce znamionowej badanego silnika indukcyjnego (przykład na rys. 2.1) i maszyny
pomocniczej oraz ustalić układy połączeń uzwojeń.
Rys. 2.1. Tabliczka znamionowa silnika indukcyjnego klatkowego
(Producent INDUKTA/CANTONI)
Tablica 2.1
Dane znamionowe badanej maszyny indukcyjnej
Lp.
Dane znamionowe
Jednostka Wartość
1 nazwę lub znak producenta
2 nazwę i typ
3 numer
fabryczny
4 rok
wykonania
5 moc
znamionowa
kW
6 znamionowe
napięcia stojana
V
7 znamionowy
prąd stojana
A
8 znamionowy
współczynnik mocy
-
9 układ połączeń uzwojeń stojana
-
10 układ połączeń uzwojeń wirnika
10 znamionowe
napięcie wirnika
V
11 znamionowy
prąd wirnika
A
znamionowa
częstotliwość Hz
12 znamionowa
prędkość obrotowa
obr/min
13 klasa
izolacji
14 rodzaj
pracy
15 stopień ochrony
2.2. Pomiar rezystancji uzwojeń
Zasady pomiaru rezystancji uzwojeń.
• Pomiar rezystancji uzwojeń stojana wykonać za pomocą mostka lub metodą techniczną.
• Pomiar rezystancji uzwojeń wirnika silnika pierścieniowego wykonać metodą techniczną (ze
względu na obecność w obwodzie rezystancji przejścia szczotka-pierścień ślizgowy).
• Dobrać odpowiednie zakresy mierników do pomiaru metodą techniczną.
• Pomiar rezystancji uzwojeń metodą techniczną wykonać dla trzech prądów z zakresu
Ćwiczenie: Maszyny indukcyjne trójfazowe
9
5÷30% prądu znamionowego (w celu zmniejszenia zjawiska nagrzewania uzwojeń w wyniku
pomiaru).
• Narysować schematy połączeń uzwojeń.
• Odczytać temperaturę otoczenia t
o
(przy szybkich pomiarach można przyjąć,
że pomierzone wartości rezystancji dotyczą temperatury uzwojeń równej temperaturze
otoczenia).
• Wyniki pomiarów zanotować w tabelach 2.2a i 2.2b.
Tablica 2.2a
Pomiar rezystancji uzwojenia stojana – kolejnych faz (uzwojenie rozłączone)
Zaciski 1U1-1U2
Zaciski 1V1-1V2
Zaciski 1W1-1W2
Lp. U I R
sU
U I R
sV
U I R
sW
V A
Ω
V A
Ω
V A
Ω
τ
x
= .........
o
C
Obliczamy wartości średnie rezystancji dla kolejnych faz uzwojenia stojana, a następnie wartość średnią
rezystancji fazowej uzwojenia stojana
3
sWśr
sVśr
sUśr
s
R
R
R
R
+
+
=
(2.1)
Tablica 2.2b
Pomiar rezystancji uzwojenia wirnika – kolejno między fazami (połączenie Y)
Zaciski 2U-2V
Zaciski 2U-2W
Zaciski 2V-2W
Lp. U I R
rUV
U I R
rUW
U I R
rVW
V A
Ω
V A
Ω
V A
Ω
τ
x
= .........
o
C
Obliczamy wartości średnie dla kolejnych rezystancji „międzyfazowych” wirnika, a następnie wartość
średnią rezystancji fazowej uzwojenia wirnika
3
rVWśr
rUWśr
rUVśr
r
R
R
R
R
+
+
=
(2.2)
W praktyce wartości rezystancji R
s
oraz R
r
we wzorach (2.1) i (2.2) — pomierzone w
temperaturze
τ
x
— przelicza się do umownej temperatury odniesienia
τ
o
(przyjmuje się wartość 20
°C) wg. zależności (2.3) i (2.4).
W przypadku uzwojenia wykonanego z miedzi stosuje się następujący wzór przeliczeniowy:
x
o
R
R
x
o
τ
τ
τ
τ
+
=
235
235
+
[
Ω] (2.3)
gdzie:
τ
x
− temperatura uzwojenia w czasie pomiaru [°C],
R
τo
− rezystancja uzwojenia sprowadzona do temperatury τ
o
,
R
τ
x
− rezystancja uzwojenia pomierzona w temperaturze τ
x
.
Jeżeli uzwojenie wykonane jest z aluminium, to do przeliczenia wartości rezystancji do
temperatury odniesienia
τ
o
stosuje się zależność:
M. Ronkowski, G. Kostro, M. Michna:
10
x
o
R
R
x
o
τ
τ
τ
τ
+
=
225
225
+
[
Ω] (2.4)
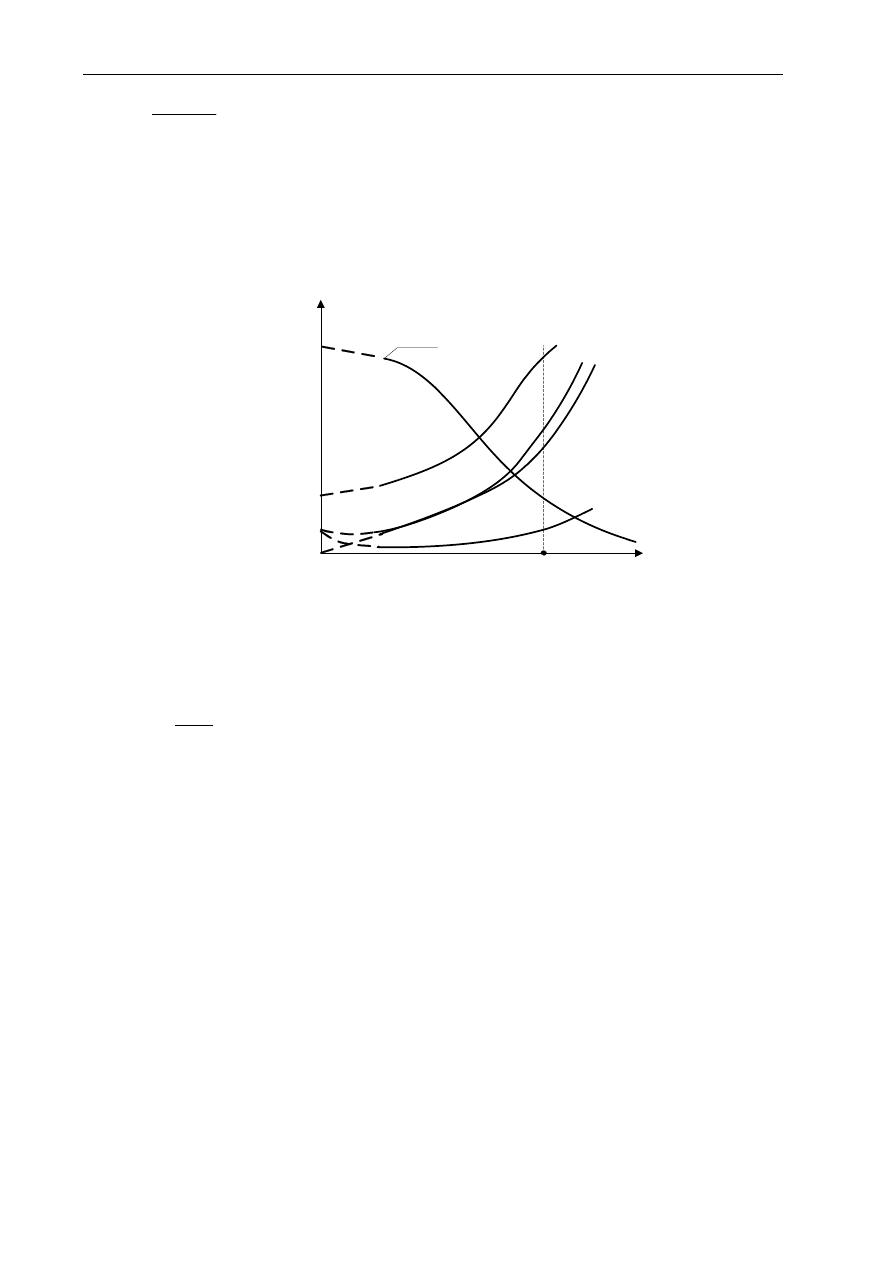
2.3. . Próba biegu jałowego
• Podstawy próby biegu jałowego
Próbę biegu jałowego wykonuje się w celu wyznaczenia tzw. strat stałych dla późniejszego
określenia sprawności silnika. Przy badaniach pełnych analiza kształtu charakterystyki biegu
jałowego, tj. strat, prądów składowych i współczynnika mocy (rys.2.2.), pozwala na wyciągnięcie
szeregu wniosków o jakości wykonania maszyny.
I [A]
0
U[V]
I
0
I
m
cos??
?
?P [W]
cos??
?
?P
0
I
0cz
Rys. 2.2. Charakterystyki biegu jałowego
Dlatego też próbę biegu jałowego przeprowadza się zasilając nieobciążony silnik napięciem
regulowanym w zakresie wartości około 1,2
− 0,2 U
N
. Przy biegu jałowym, tj. przy momencie na
wale T
L
= 0, prędkość kątowa silnika nie zależy od napięcia i jest praktycznie równa prędkości
synchronicznej:
[obr/min]
p
f
n
e
s
60
=
(2.5)
Moc pobierana przez silnik przy biegu jałowym P
0
praktycznie pokrywa następujące straty:
Cus
m
Fe
P
P
P
P
Δ
Δ
Δ
+
+
≈
0
(2.6)
gdzie,
ΔP
Fe
− straty w rdzeniu (żelazie),
ΔP
m
− straty mechaniczne,
ΔP
Cus
− straty w uzwojeniu stojana.
Straty mechaniczne składają się ze strat tarcia w łożyskach, strat tarcia szczotek (w silnikach
pierścieniowych bez urządzenia do podnoszenia szczotek), strat tarcia części wirujących w
powietrzu oraz strat wentylacyjnych. Wszystkie te straty zależą od prędkości kątowej silnika, a
więc przy próbie biegu jałowego mają praktycznie wartość stałą. Straty w żelazie składają się ze
strat na prądy wirowe, strat na histerezę oraz strat dodatkowych w stojanie. Straty te są
proporcjonalne do kwadratu indukcji, a tym samym do kwadratu napięcia (analogicznie jak w
transformatorze).
Stratami jałowymi
nazywamy sumę strat mechanicznych i strat w żelazie stojana. Oznacza to:
moc pobrana z sieci przy biegu jałowym
− zmniejszona o straty w uzwojeniu stojana:
P
o
Fe
m
Cus
o
P
P
P
P
Δ
Δ
Δ
Δ
+
=
−
=
(2.7)
Ćwiczenie: Maszyny indukcyjne trójfazowe
11
Zatem straty jałowe wykreślone w funkcji napięcia zasilania stojana
ΔP
k
k
o
≈
+
1
2
U
2
przedstawiają parabolę przesuniętą o wartość stałą odpowiadającą stratom mechanicznym. Jeżeli
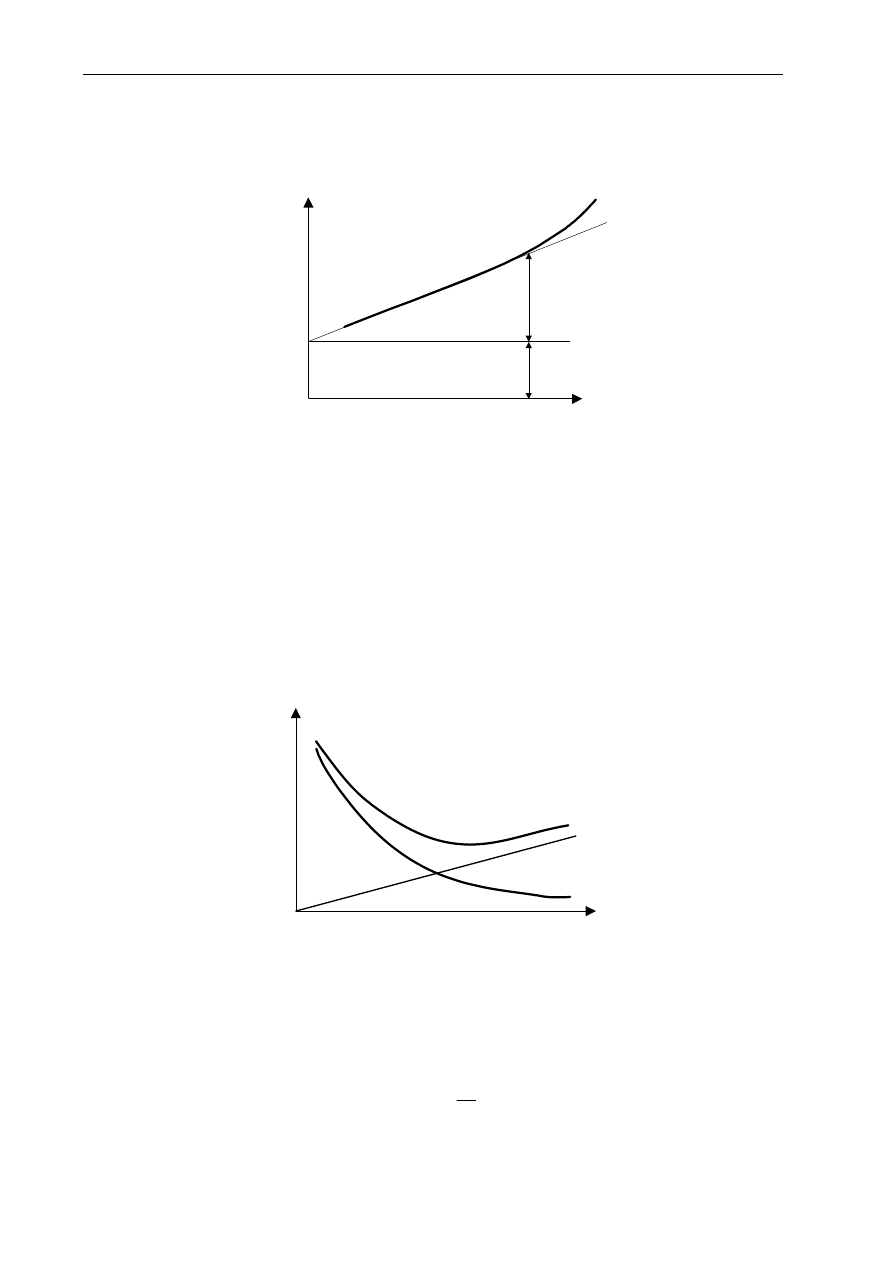
więc straty te przedstawić w funkcji kwadratu napięcia, uzyska się linię prostą, której ekstrapolacja
w kierunku osi rzędnych odetnie wielkość strat mechanicznych (rys.2.3.).
0
ΔP
0
[W]
U
2
[V
2
]
ΔP
Fe
ΔP
m
Rys. 2.3. Rozdział strat biegu jałowego
Przy większych nasyceniach obwodu magnetycznego zależność strat od napięcia jest wyższego
rzędu niż kwadratowa i dlatego charakterystyka strat jałowych przechodzi z przebiegu
prostoliniowego w paraboliczny.
Składowa czynna prądu biegu jałowego:
I
ocz
= I
om
+ I
Fe
przy czym składowa I
om
wynika z wartości strat mechanicznych, zaś składowa I
Fe
ze strat w żelazie
(
rys. 2.4.).
0
Ι
[A]
U
[V]
I
ocz
I
om
I
Fe
Rys. 2.4. Zależność składowych czynnych prądu biegu jałowego silnika od napięcia
Przy bardzo małym napięciu w silniku dominują straty mechaniczne, które, jak powiedziano
wyżej, można przyjąć jako stałe
ΔP
m
= k
1
.
Zatem zależność
I
k
U
om
=
1
przedstawia hiperbolę.
Straty
w
żelazie są proporcjonalne do kwadratu napięcia
ΔP
Fe
= k
2
U
2
,
M. Ronkowski, G. Kostro, M. Michna:
12
Zatem wyrażenie
I
k
U
k U
Fe
=
=
2
2
U
2
przedstawia zależność liniową.
Prąd biegu jałowego silnika jest sumą geometryczną składowych czynnej i biernej (magnesowania):
2
2
m
ocz
o
I
I
I
+
=
Współczynnik mocy biegu jałowego określa się:
cos
o
ϕ =
I
I
ocz
o
Przy bardzo niskich napięciach dominuje składowa czynna, a więc cos
ϕ
o
może przyjmować
wartości bliskie 1. Natomiast przy wzroście napięcia zaczyna dominować składowa bierna –
wartość cos
ϕ
o
maleje do około 0,1.
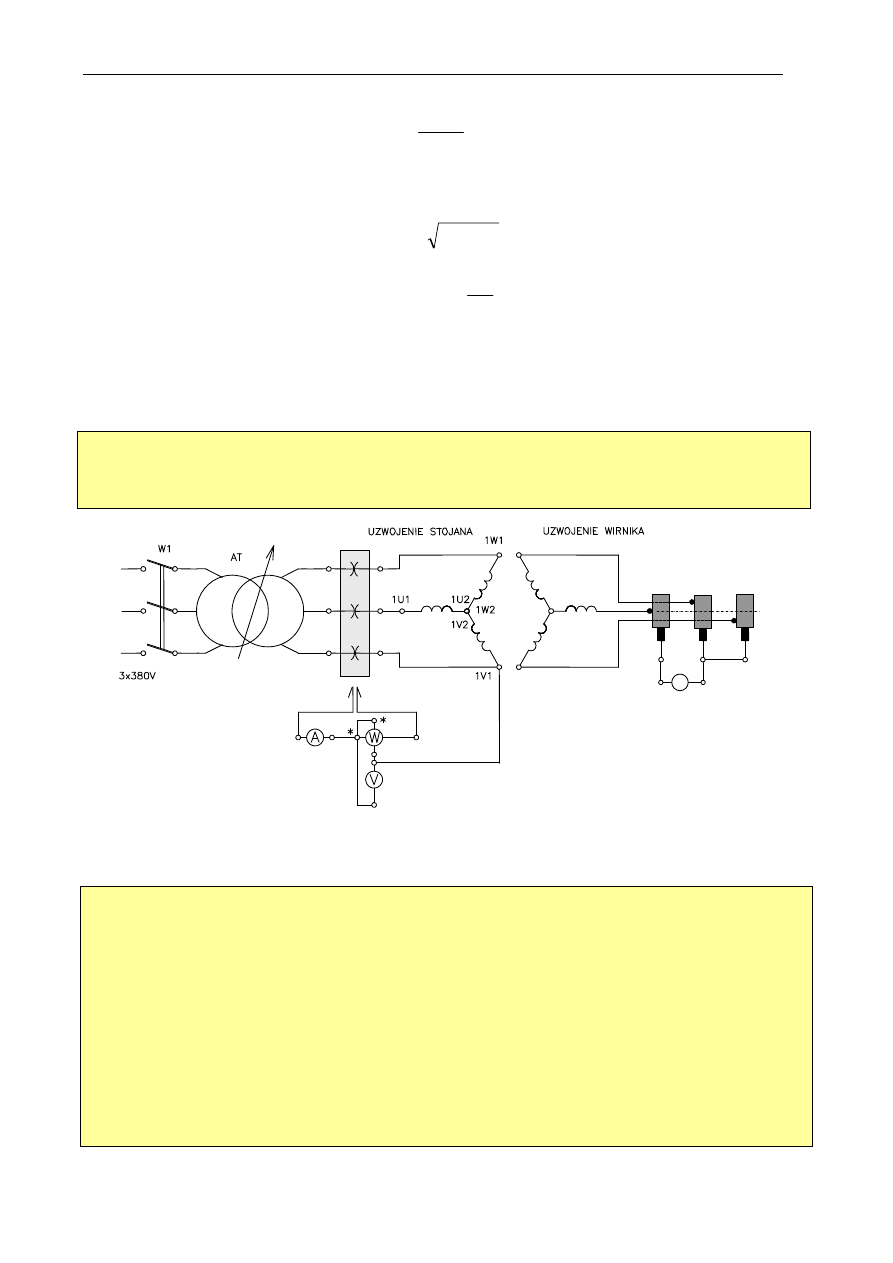
•Przebieg próby biegu jałowego
Schemat układu połączeń silnika do próby biegu jałowego przedstawiono na rys. 2.5.
Uwaga:
Należy zewrzeć zaciski uzwojenia wirnika bez podłączania dodatkowych przyrządów pomiarowych
(na pierścieniach ślizgowych - w przypadku silników ze szczotkami unoszonymi, natomiast w przypadku
silnika ze stale przylegającymi szczotkami – bezpośrednio na zaciskach wirnika).
2U
2V
2W
R
S
T
A
I
r
I’
I’’
I’’’
U’
P’
P’’
U’’
Rys. 2.5. Schemat połączeń do próby biegu jałowego silnika indukcyjnego pierścieniowego
Uwagi ogólne do wykonania próby stanu jałowego:
• Ponieważ w laboratorium dokonuje się rozruchu silnika ze źródła o regulowanym napięciu
(autotransformator lub regulator indukcyjny) zaczynając od najniższego napięcia, więc w tym
przypadku opornik rozruchowy w obwodzie wirnika jest zbyteczny.
• Należy sprawdzić, czy źródło zasilania jest ustawione na minimum napięcia i zewrzeć
pierścienie uzwojenia wirnika.
• Pomimo płynnego zwiększania napięcia rozruchowi silnika towarzyszy prąd rozruchowy,
którego wartość znacznie przewyższa prąd znamionowy silnika. Dlatego celem ograniczenia
przepływu prądu rozruchowego przez ustroje pomiarowe amperomierza i watomierza należy je
zewrzeć lub rozruchu dokonywać przy wyjętym wtyku przełącznika PW.
• Po ustaleniu się prędkości kątowej silnika rozewrzeć amperomierz (lub wtyk umieścić w
gnieździe przełącznika PW) i w trakcie dalszego zwiększania napięcia kontrolować wartość
prądu pobieranego przez silnik.
Ćwiczenie: Maszyny indukcyjne trójfazowe
13
• W przypadku ujemnego wychylenia wskazówki watomierza należy zmienić kierunek przepływu
prądu przez cewkę watomierza poprzez odwrotne umieszczenie wtyku przełącznika PW.
W czasie pomiarów należy:
• Zmieniać napięcie zasilające uzwojenie stojana w granicach od około 1,2 U
N
do wartości, przy
której prąd biegu jałowego zaczyna ponownie wzrastać, tj. do (0,2 - 0,25) U
N
lub prędkość
kątowa zaczyna się zmniejszać.
• Notować w tablicy 2.3. dwa napięcia międzyprzewodowe U
A
, U
B
.
• Notować w tablicy 2.3. trzy prądy fazowe stojana: I
A
, I
B
, I
C.
• Notować w tablicy 2.3. wskazania watomierza mierzącego moc w układzie Arona: P
α
, P
β
.
• Odczyty wykonać dla 6-8 punktów pomiarowych.
Tablica 2.3. Próba biegu jałowego silnika indukcyjnego
Wartości pomierzone
Wartości obliczone
Lp. U’ U” I” I” I’” P’ P”
U
s
I
o
P
o
ΔP
Cuo
ΔP
o
cos
ϕ
o
I
m
I
ocz
U
2
V A W V A W W V A W
W W
−
A A V
2
Opracowanie wyników próby biegu jałowego
W czasie wykonywanych pomiarów napięcia i prądy poszczególnych faz mogą się różnić między sobą. Ich
wartości średnie, podane w tablicy 2.3, należy obliczyć wg. następujących wzorów:
(
)
(
)
P
P
I
I
I
U
U
U
s
′′
+
′
=
′′′
+
′′
+
′
=
′′
+
′
=
o
o
P
I
3
1
2
1
Wartości pozostałych wielkości w tablicy 2.3 obliczamy wg. następujących wzorów:
2
3
o
s
Cuo
I
R
P
=
Δ
−
straty w uzwojeniu stojana;
Cuso
o
P
P
Δ
Δ
−
=
o
P
− pomierzone straty jałowe;
o
s
o
I
U
P
⋅
⋅
=
3
o
cos
ϕ
− współczynnik mocy przy biegu jałowym;
I
ocz
= I
o
cos
ϕ
o
− składowa czynna prądu biegu jałowego;
I
m
= I
o
sin
ϕ
o
− składowa magnesująca prądu biegu jałowego.
Na podstawie wyników uzyskanych z próby biegu jałowego należy wyznaczyć parametry gałęzi
poprzecznej schematu zastępczego silnika indukcyjnego (rys. 1.4).
Fe
s
m
s
I
U
Fe
I
U
m
X
3
3
R
≅
≅
M. Ronkowski, G. Kostro, M. Michna:
14
Wartości parametrów schematu zastępczego badanej maszyny wynoszą:
X
m
R
Fe
[
Ω] [Ω]
Uwaga:
W szczególności wyznaczyć wartości parametrów odpowiadające napięciu znamionowemu
stojana.
2.4. Pomiar przekładni napięciowej
Przekładnia napięciowa, której pomiaru dokonuje się przy otwartym obwodzie wirnika, jest
stosunkiem fazowych sił elektromotorycznych/napięć na zaciskach uzwojeń stojan i wirnika:
k
z
k
ur
r
us
u
rf
sf
s
r
s
U
U
z
E
E
≈
=
=
ϑ
(2.8)
Przebieg pomiaru przekładni
Dokonać modyfikacji schematu połączeń z rys. 2.5. poprzez rozwarcie zacisków uzwojenia
wirnika i podłączenie do nich trzech woltomierzy (lub jednego woltomierza przy założeniu
symetrii).
W czasie pomiaru przekładni napięciowej należy:
• Przy otwartym obwodzie pierścieni ślizgowych i nieruchomym wirniku (czasami wirnik obraca
się pod wpływem indukujących się prądów wirowych na powierzchni żelaza wirnika) podnieść
napięcie do wartości znamionowej.
• Dokonać pomiaru przekładni dla dwóch nieznacznie różniących się wartości napięcia.
Wyniki pomiarów notować w tablicy 2.4.
Tablica 2.4. Pomiar przekładni napięciowej
Stojan
Wirnik
Lp. U
sUV
U
sWV
U
s
U
sf
U
rUV
U
rVW
U
rWU
U
r
U
rf
ϑ
u
V V V V V V V V V
−
Opracowanie wyników przekładni napięciowej
Przy obliczeniach przekładni napięciowej należy uwzględnić następujące zależności:
3
/
s
sf
U
U
=
− napięcie fazowe przy połączeniu w gwiazdę;
U
rUV
U
rVW
U
rWU
− wartości napięcia na pierścieniach uzyskane z pomiaru; jeżeli
wszystkie napięcia są w przybliżeniu jednakowe to wirnik ma
uzwojenie 3
−fazowe i wówczas:
3
3
1
rWU
rVW
rUV
rf
U
U
U
U
+
+
=
Ćwiczenie: Maszyny indukcyjne trójfazowe
15
Jeżeli natomiast
rWU
rVW
rUV
U
U
U
′
≈
′
≈
′
2
2
, oznacza to, że wirnik ma uzwojenie 2
−fazowe,
a zatem
(
)
WU
r
VW
r
rf
U
U
U
+
=
2
1
rf
sf
u
U
U
=
ϑ
− przekładnia napięciowa.
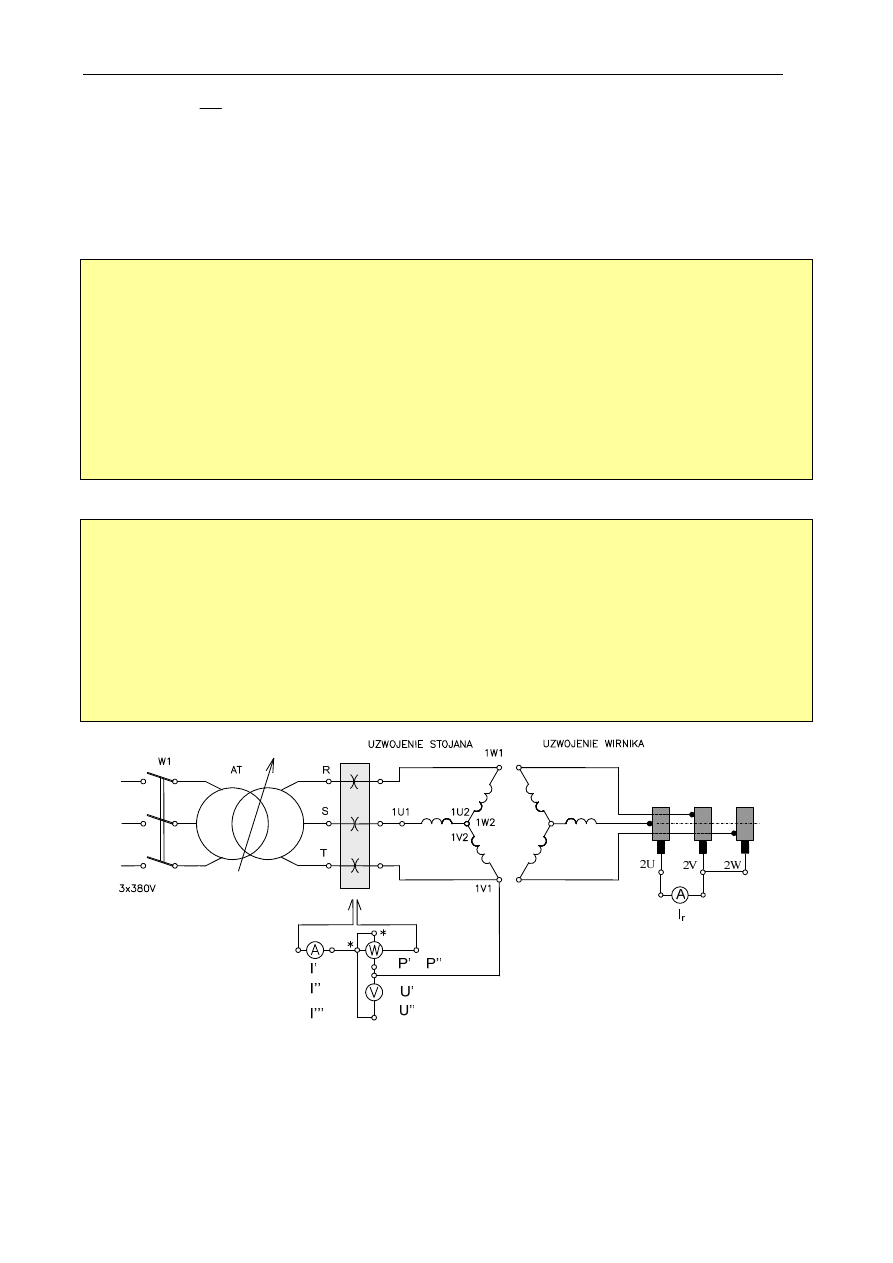
2.5. Próba zwarcia i pomiar przekładni prądowej
• Podstawy próby zwarcia
Próbę zwarcia wykonuje się w celu wyznaczenia wartości prądu zwarcia (rozruchowego)
przy napięciu znamionowym oraz wyznaczenia strat zmiennych dla późniejszego określenia
sprawności.
Próbę zwarcia wykonuje się zasilając silnik ze źródła o regulowanym napięciu. Wirnik silnika
jest zahamowany (zablokowany). Jeżeli wartość prądu i mocy zależą od położenia wirnika
względem stojana, wirnik powinien być obracany w kierunku przeciwnym do kierunku wirowania
pola z prędkością kilkudziesięciu obrotów na minutę.
W silniku z uzwojonym wirnikiem należy zewrzeć pierścienie. Przeprowadzając próbę zwarcia
należy podnosić napięcie zasilające aż do uzyskania przegięcia charakterystyki prądowej (rys. 2.6.).
I
z
[A]
0
U
z
[V]
I
z
cos
ϕ
z
P
z
[W]
cos
ϕ
z
P
z
U'
z
Rys. 2.6. Charakterystyki zwarcia
Próbę tę należy przeprowadzić szybko i sprawnie, gdyż moc zwarcia prawie w całości jest
zużywana na nagrzewanie silnika, szczególnie uzwojeń. Brak chłodzenia silnika powoduje szybki i
znaczny wzrost temperatury, który może uszkodzić izolację. Przy próbie zwarcia nie występują
straty mechaniczne, ponieważ wirnik jest zahamowany. Straty w żelazie są pomijalnie małe,
ponieważ na zaciskach silnika jest stosunkowo niskie napięcie. Moc pobierana z sieci równa się
stratom w uzwojeniach stojana i wirnika (zamieniona na ciepło)
− jest więc proporcjonalna do
kwadratu prądu:
(
)
dod
rf
r
sf
s
z
P
I
R
I
R
P
Δ
+
′
′
+
=
2
2
3
Prąd jest w przybliżeniu proporcjonalny do napięcia, stąd charakterystyka P
z
= f(U
z
) ma
przebieg paraboliczny.
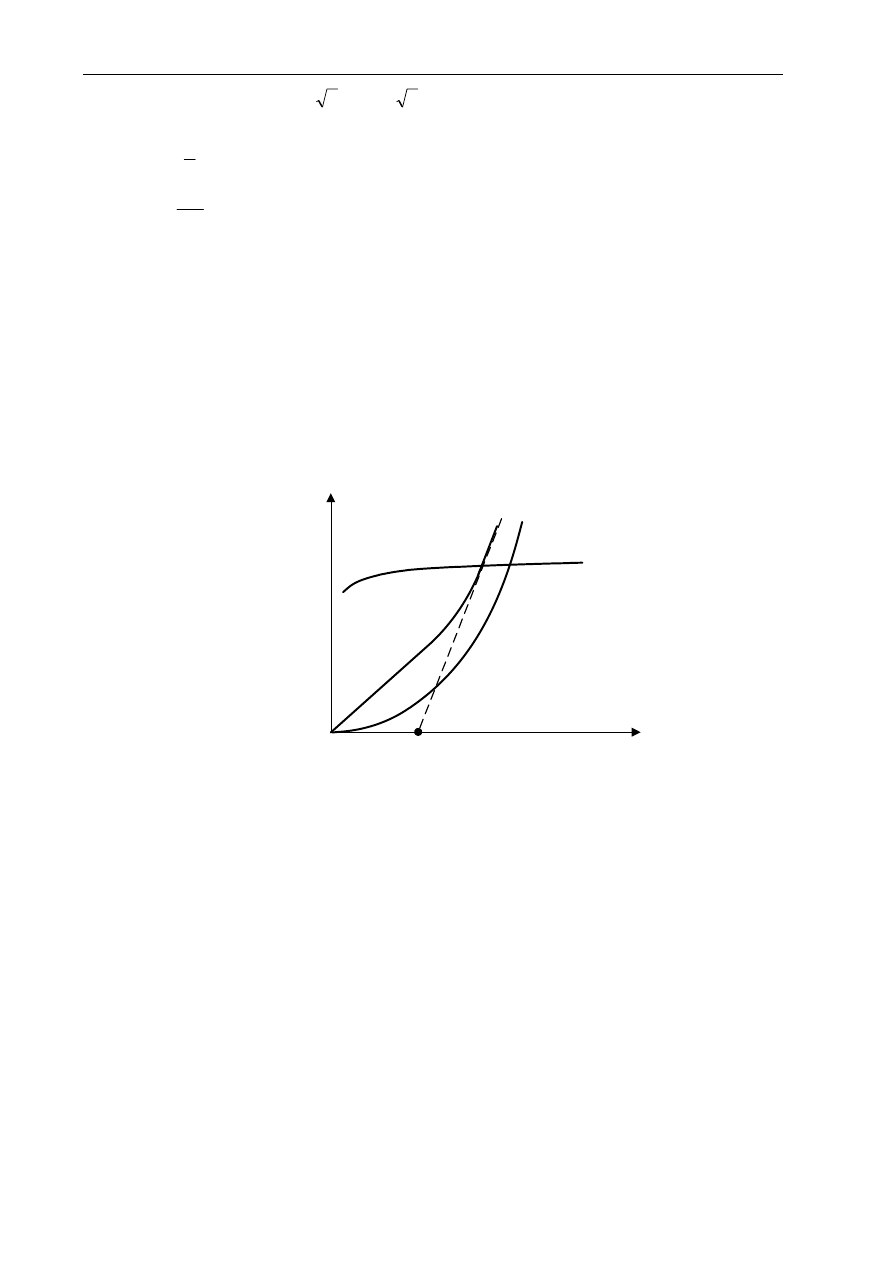
Charakterystyka prądu zwarcia I
z
= f(U
z
) w początkowej części jest linią prostą, a w miarę
wzrostu napięcia
− poprzez łagodne zagięcie − przechodzi w prostą o większym kącie nachylenia.
W początkowej fazie główna część spadku napięcia magnetycznego na drodze strumienia
rozproszenia występuje w żłobku. Przy dalszym wzroście prądu zwarcia następuje nasycenie
zębów, wskutek czego charakterystyka zagina się, by po nasyceniu znów przejść w linię prostą.
M. Ronkowski, G. Kostro, M. Michna:
16
Jeżeli z próby zwarcia uzyska się część charakterystyki ponad zagięciem, wówczas można obliczyć
prąd zwarcia przy napięciu znamionowym z zależności:
[A]
I
k
z
z
z
z
N
I
U
U
U
U
′
−
′
−
=
(2.9)
gdzie:
I
k
− prąd zwarcia przy napięciu znamionowym,
U
sN
− napięcie znamionowe,
U
z
− napięcie, przy którym w uzwojeniu płynie prąd I
z
,
′
U
z
− wartość napięcia wyznaczona graficznie na rys.2.6 - przez wykreślenie stycznej
do charakterystyki prądu zwarcia w jej górnej części.
Jak wspomniano, w stanie zwarcia strumienie rozproszenia przebiegają głównie przez
powietrze, a więc na drodze o stałym oporze magnetycznym. Reaktancja zwarciowe jest więc w
przybliżeniu stała, jeżeli pominąć wpływ nasycenia w zębach. Miarą słuszności tego założenia
może być zależność cos
ϕ
z
= f (U
z
) (rys.2.6). Jeśli nasycenie nie występuje, to reaktancja
rozproszenia jest faktycznie stała i wtedy
2
2
z
z
z
X
R
R
+
=
z
cos
ϕ
(2.10)
tzn. nie zależy od wartości prądu zwarcia. W tych warunkach charakterystyka cos
ϕ
z
= f(U
z
)
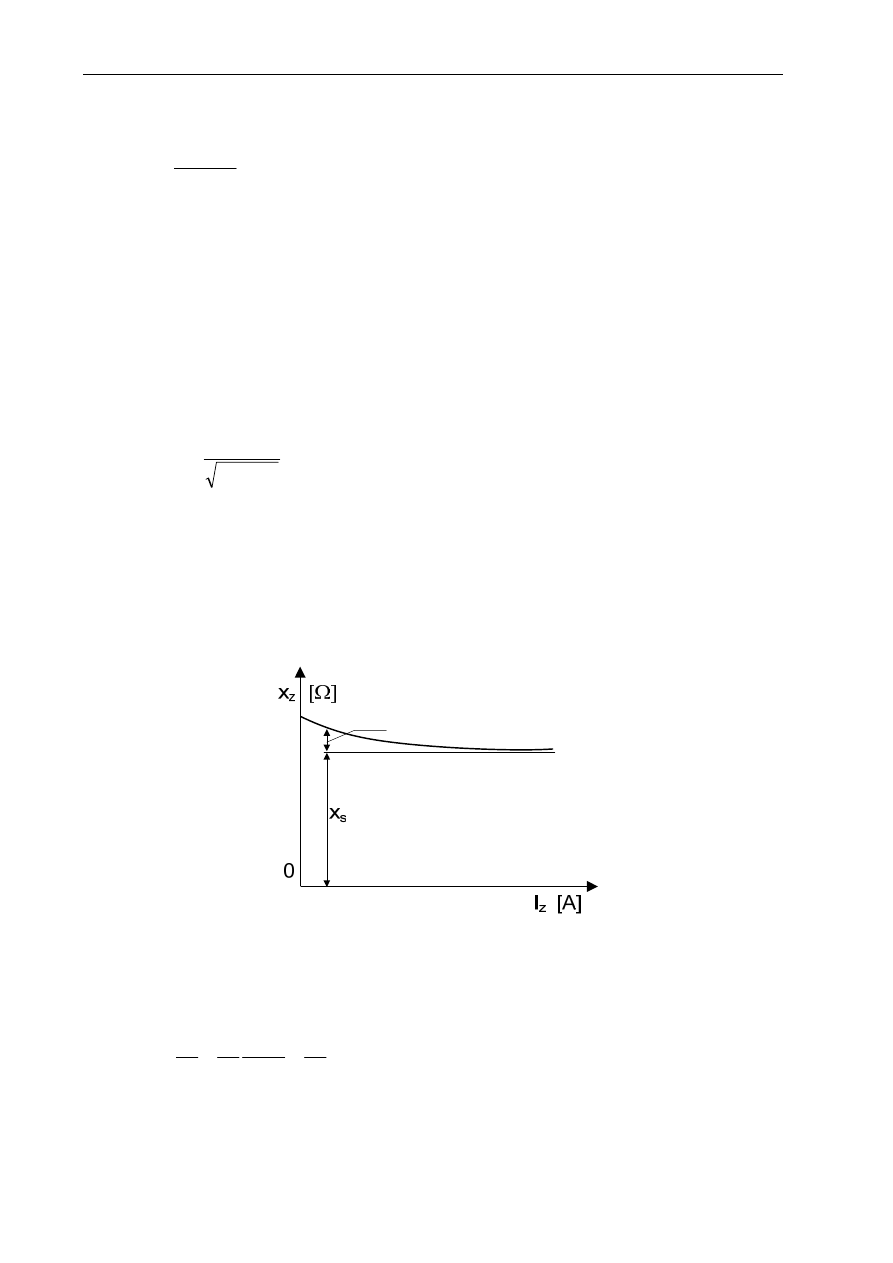
przedstawia linię prostą równoległą do osi odciętych. Ze wzrostem nasycenia reaktancja zwarcia
jednak maleje i charakterystyka cos
ϕ
z
= f(U
z
) odbiega od linii prostej (rys. 2.6.). Można więc
przyjąć, że reaktancja X
z
składa się z dwóch skłądowych:
X
s
− stałej, niezależnej od nasycenia,
X
ν
− zmiennej,
zależnej od nasycenia w zębach.
Sposób rozkładu reaktancja X
z
na składowe ilustruje rys. 2.7.
ν
X
Rys. 2.7. Rozkład reaktancji zwarcia X
z
na składowe
• Podstawy pomiaru przekładni prądowej
Pomiar przekładni prądowej dokonuje się przy pierścieniach zwartych poprzez amperomierze przy
czym:
u
r
s
s
s
r
s
sf
rf
I
m
m
z
z
m
m
I
I
ϑ
ϑ
=
=
=
ur
us
k
k
(2.11)
Ponieważ zarówno siły elektromotoryczne jak i prądy są wartościami odnoszącymi się do jednej
fazy, stąd rezystancja wirnika, sprowadzona do fazy stojana:
Ćwiczenie: Maszyny indukcyjne trójfazowe
17
2
u
r
s
r
m
m
R
ϑ
R
r
=
′
(2.12)
Analogicznie przelicza się reaktancję oraz impedancję obwodu wirnika.
Przebieg próby zwarcia i pomiaru przekładni prądowej
Przy próbie zwarcia zaciski uzwojenia wirnika należy zewrzeć za pomocą trzech amperomierzy
(rys. 2.8). Dogodne jest połączenie próby zwarcia z pomiarem przekładni prądowej.
Uwagi ogólne do próby zwarcia i pomiaru przekładni prądowej:
• Zakresy przyrządów pomiarowych należy dobrać do największych wartości wielkości
występujących przy tej próbie: prąd stojana i wirnika równy 1,5 prądu znamionowego, napięcie
do 60% napięcia znamionowego.
• Należy sprawdzić, czy źródło zasilania jest ustawione na minimum napięcia.
• Wirnik badanego silnika zahamować za pomocą hamulca mechanicznego.
• Próbę zwarcia należy wykonywać możliwie szybko, a w czasie przerw w pomiarach należy
wyłączać zasilanie silnika. Pozwoli to ograniczyć niekorzystny ze względu na dokładność próby
wzrost temperatury uzwojeń.
• W przypadku ujemnego wychylenia wskazówki watomierza należy zmienić kierunek przepływu
prądu przez cewkę watomierza poprzez odwrotne umieszczenie wtyku przełącznika PW.
W czasie pomiarów należy:
• Włączyć badany silnik do sieci przy napięciu możliwie bliskim wartości 0 V.
• Napięcie zasilania zwiększać tak, aby prąd stojana zmieniał się w granicach
I
z
= (0,1
− 1,0) I
N
.
• Notować w tablicy 2.5. dwa napięcia międzyprzewodowe: U
A
, U
B
.
• Notować w tablicy 2.5. trzy prądy fazowe stojana: I
A
, I
B
, I
C.
• Notować w tablicy 2.5. wskazania watomierza mierzącego moc w układzie Arona: P
α
, P
β
.
• Notować w tablicy 2.5. dwa prądy wirnika: I
rA
, I
rB
, I
rC
.(przy założeniu symetrii wystarczy
pomiar prądu w jednej z faz wirnika).
• Odczyty wykonać dla 5-6 punktów pomiarowych.
Rys. 2.8. Schemat połączeń do próby stanu zwarcia silnika indukcyjnego pierścieniowego
M. Ronkowski, G. Kostro, M. Michna:
18
Tablica 2.5. Próba zwarcia i pomiar przekładni prądowej
Wartości pomierzone stojana Wartości obliczone -
próba zwarcia
Wartości pomierz.
wirnika
Wart. oblicz.-
przekład.
prądowa
Lp. U
s
’ I
s
’
P
’
U
s
”
I
s
”
P
”
I
s
”’
U
z
I
z
P
z
cos
ϕ
z
I
rU
I
rV
I
rW
I
r
ϑ
I
V A W V A W A V A W
−
A A A A
Opracowanie wyników próby zwarcia
W czasie wykonywanych pomiarów napięcia i prądy poszczególnych faz mogą się różnić między
sobą. Ich wartości średnie podane w tablicy 2.5. należy obliczyć wg następujących wzorów:
P
P
P
I
I
I
I
U
U
U
z
s
s
s
z
s
s
z
′′
+
′
=
′′′
+
′′
+
′
=
′′
+
′
)
(
)
(
=
3
1
2
1
z
z
z
z
I
U
P
3
cos
=
φ
Wyznaczenie parametrów gałęzi podłużnej schematu zastępczego silnika indukcyjnego
R
-
=
R
s
z
r
I
P
z
I
U
z
R
R
Z
z
z
z
z
′
=
=
2
3
3
Reaktancje rozproszeniowe:
2
2
2
1
2
1
z
z
z
r
s
R
Z
X
X
X
−
=
=
′
≅
σ
σ
Parametry schematu zastępczego
X
σs
X'
σr
R
s
R'
r
[
Ω] [Ω] [Ω] [Ω]
Uwaga:
W szczególności wyznaczyć wartości parametrów odpowiadające prądowi znamionowemu
stojana.
Opracowanie wyników pomiaru przekładni prądowej
W czasie wykonywanych pomiarów napięcia i prądy poszczególnych faz mogą się różnić między
sobą. Ich wartości średnie należy obliczyć wg. następujących wzorów (tablica 2.5):
(
)
s
s
s
s
I
I
I
I
′′′
+
′′
+
′
=
3
1
przy połączeniu uzwojeń w gwiazdę,
Ćwiczenie: Maszyny indukcyjne trójfazowe
19
(
)
s
s
s
s
I
I
I
I
′′′
+
′′
+
′
=
3
3
1
przy połączeniu uzwojeń w trójkąt,
I
r
= (I
rU
+ I
rV
+ I
rW
),
s
r
I
I
I
=
ϑ
.
2.6. Zadania
1. Obliczyć parametry schematu zastępczego badanej maszyny indukcyjnej.
Uwaga:
narysować model obwodowy i nanieść wartości parametrów odpowiadające napięciu i
prądowi znamionowego silnika.
2. Wykreślić charakterystykę strat jałowych
ΔP
o
= f (U
2
), i wyznaczyć straty przy napięciu
znamionowym:
ΔP
m
= . . . . . . . . . . [W]
ΔP
Fe
= . . . . . . . . . . [W]
Odnieść ich wartości do mocy znamionowej badanego silnika. Przeanalizować uzyskane wyniki.
3. Podać uzyskane wartości rezystancji uzwojeń, przekładnię napięciową i przekładnię prądową.
W oparciu o te wielkości narysować schemat połączeń wirnika badanego silnika.
4. Wykreślić charakterystyki zwarcia P
z
, cos
ϕ
z
, I
z
= f (U
z
). Przeprowadzić analizę oraz wyciągnąć
wnioski z ich przebiegu i wartości.
Dla
prądu znamionowego silnika porównaj wartości mocy P
Z
ze stratami w uzwojeniach
silnika, wyznaczonymi w oparciu o pomierzone wartości rezystancji:
ΔP
Cus
=
[W]
ΔP
Cur
=
[W].
Odnieść ich wartości do mocy znamionowej badanego silnika. Przeanalizować uzyskane
wyniki.
5. Obliczyć sprawność znamionową silnika w oparciu o pomierzone straty.
6. Wyznaczyć wg zależności (1.3) charakterystykę mechaniczną (moment obrotowy w funkcji
poślizgu) badanego silnika dla wyznaczonych wartości parametrów modelu obwodowego.
Wyznaczyć wartość momentu dla poślizgu znamionowego i porównać z wartością momentu
znamionowego badanego silnika (
)
/
/(
60
2
N
N
N
n
P
T
π
=
. Uzasadnić występujące różnice wartości.
2.7. Pytania kontrolne
Pytania ze znajomości teorii i zagadnień dotyczących sprawozdania
1. Podać rodzaje budowy silników indukcyjnych. Wymienić elementy stojana i wirnika silnika
indukcyjnego.
2. Opisać zasadę działania silnika indukcyjnego w ujęciu ciągu logicznego przyczyna - skutek.
3. Narysować podstawowy (elementarny) model fizyczny (układ dwóch przepływów) silnika
indukcyjnego. Wykazać analitycznie, wprowadzając dwóch obserwatorów mierzących prędkość
kątową pola wirującego wirnika, że w stanie pracy ustalonej silnika układ dwóch przepływów jest
nieruchomy względem siebie). Jakie są tego konsekwencje?
4. Opisać obraz fizyczny (składowe strumieni) i model obwodowy (schemat zastępczy) silnika
indukcyjnego dla biegu jałowego.
5. Opisać obraz fizyczny (składowe strumieni) i model obwodowy (schemat zastępczy) silnika
indukcyjnego w stanie zwarcia.
6. Narysować modele silnika indukcyjnego : fizyczny (składowe strumieni) i obwodowy (schemat
zastępczy). Podać i wyjaśnić wzajemne relacje między wielkościami modelu fizycznego a zmiennymi i
parametrami modelu obwodowego (schematu zastępczego).
7. Podać i wyjaśnić analogie modelu obwodowego (schematu zastępczego) silnika indukcyjnego i
transformatora.
8. Narysować model obwodowy (schemat zastępczy) silnika indukcyjnego, nazwać tworzące go elementy
i dokonać interpretacji fizycznej tych elementów.
M. Ronkowski, G. Kostro, M. Michna:
20
9. Podać, nazwać i objaśnić podstawowe wielkości charakterystyczne i zależności dotyczące silników
indukcyjnych (I
o
,
Φ
m
,
Φ
σ1
Φ
σ2
, E
s
, E
r
,
ϑ
I
,
ϑ
u
, I
z
, U
z
,
ΔP
Fe
,
ΔP
Cu
,
ΔP
o
,
ΔP
m
).
10. Na podstawie jakich prób wyznacza się parametry modelu obwodowego (schematu zastępczego)
silnika indukcyjnego? Podać zależności między wynikami tych prób i parametrami modelu
obwodowego.
11. Podać charakterystyki biegu jałowego badanego silnika indukcyjnego i uzasadnić fizycznie oraz
analitycznie ich kształt.
12. Podać charakterystyki zwarcia badanego silnika indukcyjnego i uzasadnić fizycznie oraz analitycznie
ich kształt.
13. Podać wykresy wartości parametrów modelu obwodowego (schematu zastępczego) badanego silnika
indukcyjnego w funkcji napięcia zasilania U
s
: oddzielnie dla gałęzi magnesującej (podłużnej) i gałęzi
zwarciowej (poprzecznej) schematu. Uzasadnić fizycznie oraz analitycznie ich kształt.
Pytania z przygotowania praktycznego do ćwiczenia
1. Podać najważniejsze dane tabliczki znamionowej silnika indukcyjnego.
2. Co to są uzwojenia stojana i wirnika, wielkości pierwotne i wtórne, silnika indukcyjnego?
3. Wymienić podstawowe metody rozruchu silnika indukcyjnego (klatkowego, pierścieniowego).
4. Wymienić podstawowe próby silnika indukcyjnego i jakie wielkości fizyczne na podstawie wyników
tych prób się wyznacza.
5. Podać orientacyjne wartości procentowe dla silników indukcyjnych:
• spadku napięcia na rezystancji zwarcia,
• prądu biegu jałowego,
• napięcia zwarcia,
• strat w żelazie, w miedzi uzwojeń i mechanicznych, a także relacje między ich wartościami,
• sprawności.
6. Podać definicję przekładni (napięciowej, prądowej) silnika indukcyjnego pierścieniowego. Dlaczego
należy wyznaczyć obie przekładnie silnika?
7. Jak należy dobrać zakresy woltomierza, amperomierza i watomierza do pomiarów biegu jałowego
silnika? Podać czy pomiary należy wykonać z poprawnie mierzonym prądem czy napięciem?
8. Jak należy dobrać zakresy woltomierza, amperomierza i watomierza do pomiarów stanu zwarcia silnika?
Podać czy pomiary należy wykonać z poprawnie mierzonym prądem czy napięciem?
9.
Wymienić podstawowe charakterystyki silnika indukcyjnego (dotyczące tematyki ćwiczenia),
wymieniając współrzędne oraz wielkości jakie należy utrzymywać stałe
.
10. Literatura
[1]
Latek W.: Zarys maszyn elektrycznych. WNT, W-wa 1974.
[2]
Latek W.: Badania maszyn elektrycznych w przemyśle. WNT, W-wa 1979.
[3]
Manitius Z.: Maszyny asynchroniczne. Skrypt. Wyd . Pol. Gdańskiej, Gdańsk 1977.
[4]
Plamitzer A.: Maszyny elektryczne. Wyd. 7. WNT, W-wa 1992.
[5]
Praca zbiorowa (red. Manitius Z.): Laboratorium maszyn elektrycznych. Skrypt. Wyd.2. Wyd. Pol.
Gdańskiej, Gdańsk 1990.
[6]
Rafalski W., Ronkowski M., Zadania z maszyn elektrycznych, Cz. I: Transformatory i maszyny
asynchroniczne, wyd. 4, Wyd. Politechniki Gdańskiej, 1994.
[7]
Roszczyk S.: Teoria maszyn elektrycznych. WNT, W-wa 1979.
[8]
Ronkowski M.: Maszyny elektryczne. Szkice do wykładów. PG 2011/2012.
http://www.eia.pg.gda.pl/e-mechatronika/
[9]
Staszewski P., Urbański W.: Zagadnienia obliczeniowe w eksploatacji maszyn elektrycznych,
Warszawa, Oficyna Wydawnicza Politechniki Warszawskiej 2009.
[10]
PN-IEC 34-1:1997
Maszyny elektryczne wirujące. Ogólne wymagania i badania
:
http://www.pkn.pl/
Wyszukiwarka
Podobne podstrony:
Lab ME MI instrukcja 2011 2012 E
Lab ME SPS instrukcja 2011 2012 E
Lab ME TR instrukcja 2011 2012 Nieznany
Lab ME MI1 instrukcja 2012 E
Lab ME MPS instrukcja 2012 E
Lab ME MI tabele 2010 2011
Lab ME MS instrukcja 2012 E id Nieznany
Lab ME TR instrukcja 2012 E id Nieznany
Lab ME MI2 instrukcja 2012 E id Nieznany
Lab ME MI pytania kontrolne 2010 2011
Lab ME MS instrukcja 2012 E
Lab ME MPS instrukcja 2012 E
Lab ME MI2 instrukcja 2012 E
Lab ME II zad rach 2012 13
Lab ME MPS pytania kontr 2012 E
więcej podobnych podstron