POLITECHNIKA GDA
Ń
SKA
WYDZIAŁ ELEKTROTECHNIKI I AUTOMATYKI
KATEDRA ENERGOELEKTRONIKI I MASZYN ELEKTRYCZNYCH
L AB O R AT O R I U M
M AS Z Y N Y E L E K T R Y C Z N E
Ć
WICZENIE (MI2)
MASZYNY INDUKCYJNE/ASYNCHRONICZNE TRÓJFAZOWE
BADANIE CHARAKTERYSTYK MECHANICZNYCH
Materiały pomocnicze
Kierunek Elektrotechnika
Studia stacjonarne 1-szego stopnia
semestr 3
Opracował
Mieczysław Ronkowski
Grzegorz Kostro
Michał Michna
Gda
ń
sk 2012-2013
La b _ M E _ M I 2 _ i n s t r u k c j a _ 2 0 1 2 _ E
Ć
WICZENIE (MI2)
MASZYNY INDUKCYJNE/ASYNCHRONICZNE TRÓJFAZOW
BADANIE CHARAKTERYSTYK MECHANICZNYCH
1.
Teoria
1.1
Charakterystyka mechaniczna maszyny indukcyjnej i metody jej
kształtowania
Charakterystyka mechaniczna naturalna maszyny indukcyjnej przedstawia zależność:
mementu obrotowego na wale T
m
od prędkości kątowej
Ω
m
(obrotowej n) lub poślizgu s:
)
(
m
m
m
T
T
Ω
====
lub
)
(
n
T
T
m
m
====
lub
)
(
s
T
T
m
m
====
przy napięciu i częstotliwości zasilania stojana: U
s
= U
sn
= const oraz f
e
= f
en
= const
przy braku rezystancji dodatkowej w obwodzie wirnika.
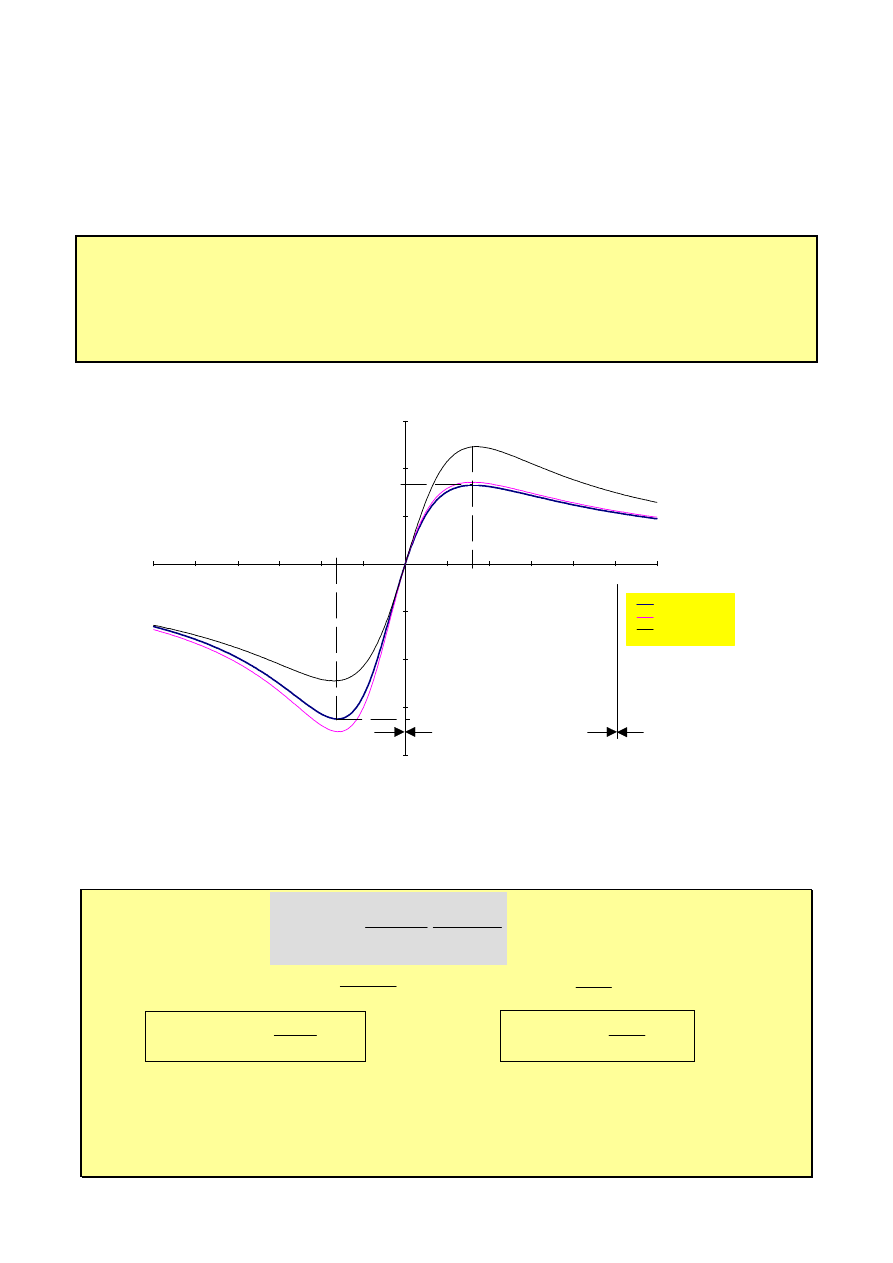
Przykład naturalnych charakterystyk mechanicznych maszyny indukcyjnej podano na rys. 1.1.
-80
-60
-40
-20
0
20
40
60
-1.2
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
1.2
model "T"
model " "
model " " R = 0
SILNIK
PR
Ą
DNICA
HAMULEC
s
k+
s
k-
emx
+T
T
e
s [-]
[Nm]
Γ
Γ
emx
-T
s
Rys. 1.1. Przykładowe charakterystyki mechaniczne wielofazowej maszyny indukcyjnej – charakterystyki
wykreślono na podstawie modelu obwodowego o konturze „T”, „
Γ
” oraz „
Γ
” przy założeniu R
s
= 0 (wg
równania (1.1))
Z równania (1.1) charakterystyki mechanicznej maszyny indukcyjnej wynikają metody jej
kształtowania – sterowania prędkością obrotową.
2
2
2
k
k
z
e
s
s
e
s
s
s
s
X
U
pm
T
++++
≅≅≅≅
ω
(1.1)
s
m
s
s
Ω
Ω
Ω
−−−−
====
lub
s
s
n
n
n
s
−−−−
====
)
(
)
(
s
p
f
s
e
s
m
−−−−
====
−−−−
====
1
2
1
π
Ω
Ω
[rad/s]
lub
)
(
)
(
s
p
f
s
n
n
e
s
−−−−
====
−−−−
====
1
60
1
[obr/min]
gdzie: f
e
– częstotliwość napięcia zasilania silnika, p – liczba par biegunów, s - poślizg silnika,
/
z
r
k
X
R
s
′′′′
====
- poślizg krytyczny (poślizg dla którego moment elektromagnetyczny osiąga
wartość maksymalną).
Uwaga: Równanie momentu elektromagnetycznego (1.1) wyprowadzono na podstawie modelu
obwodowego o konturze „
Γ
” przyjmując uproszczenie R
s
≅
0.
3
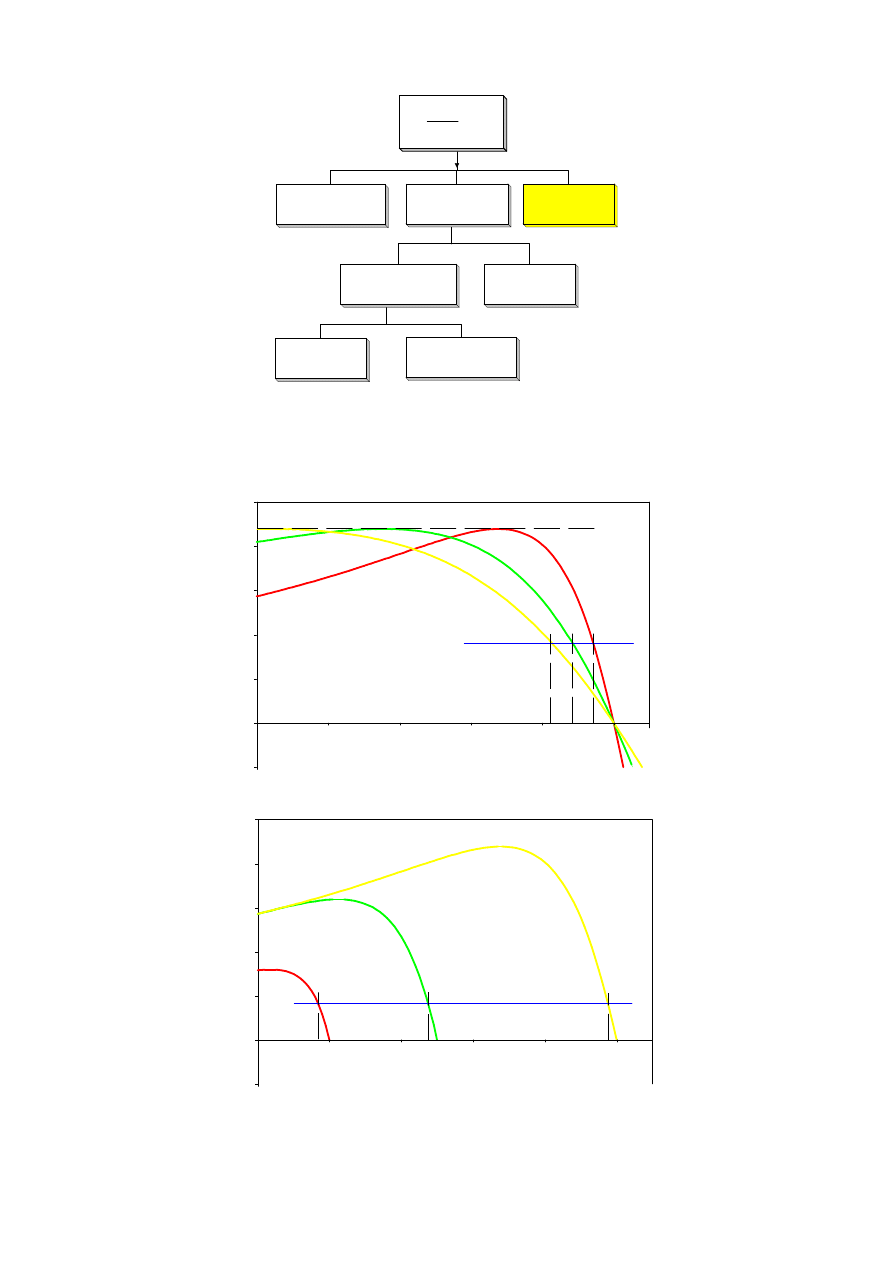
Metody sterowania prędkością obrotową silnika indukcyjnego przedstawiono na rys. 1.2.
Zmiana liczby par
biegunów
Zmiana
cz
ę
stotliwo
ś
ci
Zmiana napi
ę
cia
stojana
Zmiana
rezystancji
Kaskada
podsynchroniczna
(
)
n
60 f
p
1 - s
e
=
Zmiana po
ś
lizgu
Zmiana w obwodzie
wirnika
Rys. 1.2. Metody sterowania prędkością obrotową silnika indukcyjnego
Przykłady kształtowanych charakterystyk mechanicznych maszyny indukcyjnej podano na rys. 1.3.
a)
25
20
15
10
5
0
-5
Rrd = 2 Rr
Rrd = Rr
Rrd = 0
Te = Temx
Te [Nm]
Date/Time run: 04/20/97 12:00:02
Temperature: 27.0
T = CONST
0.2
0.4
0.6
0.8
1.0
1.1
Ω
Ω
rm
/
p
en
/
(
)
L
b)
25
20
15
10
5
0
-5
fe = 0.2fen
Us = 0.2Usn
fe = 0.5fen
Us = 0.5Usn
fe = fen = 50Hz
Us = Usn
Te [Nm]
Date/Time run: 04/20/97 11:44:43
Temperature: 27.0
T = CONST
Ω
Ω
rm
/
p
en
/
(
)
0
0.2
0.4
0.6
0.8
1.0
1.1
L
Rys. 1.3. Przykłady kształtowanych charakterystyk mechanicznych maszyny indukcyjnej: a) zmiana poślizgu
– włączenie rezystancji dodatkowej R
rd
do obwodu wirnika, b) zmiana częstotliwości napięcia zasilania
stojana
4
2.
Badania
2.1
Ogl
ę
dziny zewn
ę
trzne
Odczytać dane znamionowe badanego silnika indukcyjnego pierścieniowego (SIP) i prądnicy prądu
stałego (obciążenia silnika).
Zanotować dane użytych mierników.
2.2
Pomiary charakterystyki mechanicznej
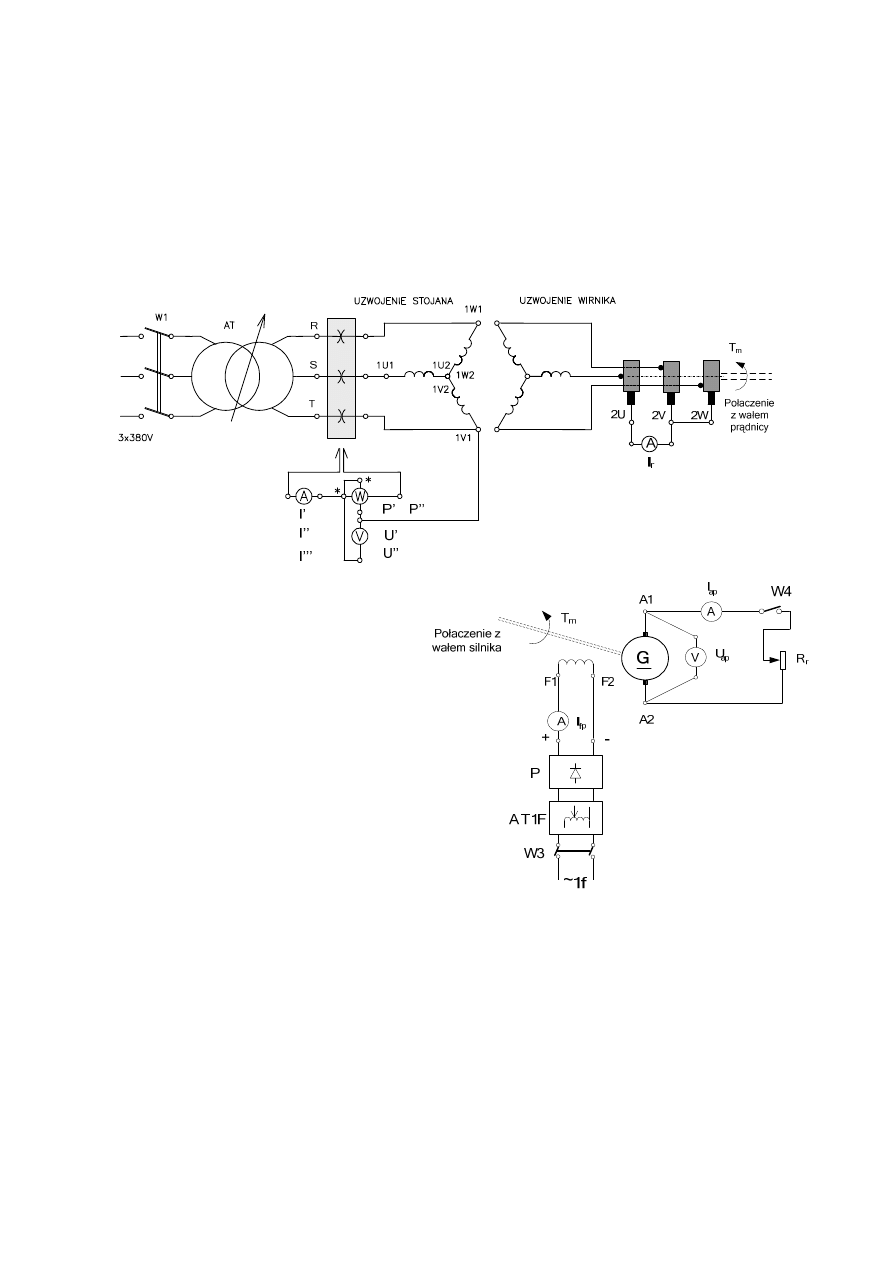
Schemat układu połączeń do pomiaru charakterystyki mechanicznej silnika przedstawia rys. 2.2.
a)
b)
Rys. 2.2. Schemat układu do pomiaru charakterystyki mechanicznej silnika indukcyjnego pierścieniowego
a) układ połączeń badanego silnika, b) układ połączeń
obciążenia silnika - prądnicy prądu stałego
Pomiary wykonać przy stałej wartości napięcia i częstotliwości zasilania badanego silnika:
U
s
= const
f
e
= const
Charakterystykę mechaniczną badanego SIP wyznaczamy dla dwóch przypadków:
1.
rezystancja dodatkowa w obwodzie wirnika R
rd
= 0 (obwód wirnika zwarty)
2.
rezystancja dodatkowa w obwodzie wirnika R
rd
> 0 (do obwodu wirnika włączyć rezystor
3-fazowy).
Uwaga: zanotować przyjętą wartość R
rd
dla przypadku 2).
Wyniki pomiarów zanotować w Tab.2.1.
5
Tablica 2.1. Pomiar charakterystyki mechanicznej
Wartości pomierzone
Wartości obliczone
Lp.
U’
U” I”
I” I’” P’ P”
n
T
m
U
ap
I
ap
U
s
I
s
P
s
cos
ϕ
s
s
T
mob
V
A
A
A
A W W obr/
min
Nm
V
A
V
A
W
A
-
Nm
Opracowanie wyników pomiarów.
W czasie wykonywanych pomiarów napięcia i prądy poszczególnych faz mogą się różnić między
sobą. Ich wartości średnie, podane w tablicy 2.1, należy obliczyć wg. następujących wzorów:
((((
))))
((((
))))
P
P
I
I
I
U
U
U
s
′′′′′′′′
++++
′′′′
====
′′′′′′′′′′′′
++++
′′′′′′′′
++++
′′′′
====
′′′′′′′′
++++
′′′′
====
s
s
P
I
3
1
2
1
(2.1)
s
s
s
I
U
P
⋅⋅⋅⋅
⋅⋅⋅⋅
====
3
s
cos
ϕ
−
współczynnik mocy przy obciążeniu.
(2.2)
W przypadku braku miernika momentu obrotowego (momentomierza) jego wartość na wale silnika
wyznaczamy metodą przybliżoną – mierząc dodatkowo moc oddawaną przez prądnicę prądu
stałego:
)
/
(
60
2
2
1
2
1
n
P
P
P
P
P
T
p
s
p
s
m
mob
m
m
π
====
≅≅≅≅
====
Ω
Ω
Ω
Ω
Ω
Ω
Ω
Ω
(2.3)
gdzie: P
1s
= P
s
- moc pobierana przez silnik, P
2p
- moc oddawana przez prądnicę prądu stałego.
Wzór (2.3) jest słuszny przy następujących założeniach upraszczających:
•
sprawności silnika i prądnicy są jednakowe:
p
s
η
η
====
•
moc oddawana przez silnik P
2s
równa się mocy mechanicznej P
m
pobranej przez prądnicę
P
1p
:
p
m
s
P
P
P
1
2
====
====
(2.4)
•
moc elektryczna oddawana przez prądnicę
ap
ap
p
I
U
P
====
2
(2.5)

6
2.3 Zadania
1
Wykreślić pomierzone charakterystyki mechaniczne badanego silnika.
2
Na pomierzonych charakterystykach mechanicznych wykreślić współrzędne odpowiadające
znamionowemu momentowi i znamionowej prędkości obrotowej badanego silnika.
3
Uzasadnić kształt pomierzonych charakterystyk. Porównać je z charakterystykami
idealizowanymi. Należy posłużyć się rozważaniami fizycznymi i odpowiednimi zależnościami
analitycznymi (np. rów. (1.1)).
4
Wyznaczyć procentową zmianę prędkości obrotowej przy znamionowym obciążeniu w
stosunku do prędkości biegu jałowego badanego silnika.
5
Obliczyć wg wzoru (1.1) wartość prędkości obrotowej dla badanego silnika w warunkach
znamionowego zasilania. Porównać wyznaczoną wartość z podaną na tabliczce znamionowej
silnika.
6
Wykreślić charakterystyki mechaniczne badanego silnika wg rów. (1.1) dla zadanych przez
prowadzącego wartości rezystancji dodatkowych w obwodzie wirnika.
Na wykresie wyznaczyć także charakterystykę naturalną badanego silnika. Do obliczeń
posłużyć się parametrami silnika wyznaczonymi z próby biegu jałowego i stanu zwarcia.
Uzasadnić kształt pomierzonych charakterystyk. Należy posłużyć się rozważaniami fizycznymi
i odpowiednimi zależnościami analitycznymi (np. rów. (1.1)).
Uwaga: Zadanie 6 wykonuje każda/y studentka/student z grupy ćwiczeniowej.
7
Sporządzić bilans mocy i strat badanego silnika dla pracy w warunkach znamionowych.
8
Porównać sprawność i koszty aparatury dla poszczególnych sposobów sterowania prędkości
obrotowej badanego silnika.
2.4 Pytania kontrolne
• Pytania ze znajomości teorii z zakresu tematyki ćwiczenia
1.
Podać rodzaje budowy silników indukcyjnych. Wymienić elementy stojana i wirnika silnika
indukcyjnego.
2.
Narysować podstawowy (elementarny) model fizyczny (układ dwóch przepływów) silnika
indukcyjnego. Wykazać analitycznie, wprowadzając dwóch obserwatorów mierzących
prędkość kątową pola wirującego wirnika, że w stanie pracy ustalonej silnika układ dwóch
przepływów jest nieruchomy względem siebie). Jakie są tego konsekwencje?
3.
Narysować modele silnika indukcyjnego : fizyczny (składowe strumieni) i obwodowy (schemat
zastępczy). Podać i wyjaśnić wzajemne relacje między wielkościami modelu fizycznego a
zmiennymi i parametrami modelu obwodowego (schematu zastępczego).
4.
Podać i wyjaśnić analogie modelu obwodowego (schematu zastępczego) silnika indukcyjnego i
transformatora.
5.
Narysować model obwodowy (schemat zastępczy) silnika indukcyjnego, nazwać tworzące go
elementy i dokonać interpretacji fizycznej tych elementów.
6.
Na podstawie jakich prób wyznacza się parametry modelu obwodowego (schematu
zastępczego) silnika indukcyjnego? Podać zależności między wynikami tych prób i
parametrami modelu obwodowego.
7.
Podać zależność i wykreślić idealizowaną charakterystykę mechaniczną o maszyny
indukcyjnej.
8.
Podać metody sterowania prędkością obrotową silnika indukcyjnego. Wykreślić idealizowane
charakterystyki mechaniczne dla poszczególnych metod sterowania prędkością obrotową.
Pytania z przygotowania praktycznego do
ć
wiczenia
1.
Podać najważniejsze dane tabliczki znamionowej i układy połączeń uzwojeń silnika
indukcyjnego.
2.
Wymienić podstawowe metody rozruchu silnika indukcyjnego (klatkowego, pierścieniowego).
7
3.
Jak należy dobrać zakresy woltomierza, amperomierza i watomierza do pomiarów biegu
jałowego silnika?
4.
Narysować podstawowe charakterystyki silnika indukcyjnego (dotyczące tematyki ćwiczenia),
wymieniając współrzędne oraz wielkości jakie należy utrzymywać stałe.
2.5 Literatura pomocnicza
[1] Latek W.: Zarys maszyn elektrycznych. WNT, W-wa 1974.
[2] Latek W.: Badania maszyn elektrycznych w przemyśle. WNT, W-wa 1979.
[3] Manitius Z.: Maszyny asynchroniczne. Skrypt. Wyd . Pol. Gdańskiej, Gdańsk 1977.
[4] Plamitzer A.: Maszyny elektryczne. Wyd. 7. WNT, W-wa 1992.
[5] Praca zbiorowa (red. Manitius Z.): Laboratorium maszyn elektrycznych. Skrypt. Wyd.2. Wyd.
Pol.
Gdańskiej, Gdańsk 1990.
[6] Rafalski W., Ronkowski M., Zadania z maszyn elektrycznych, Cz. I: Transformatory i maszyny
asynchroniczne, wyd. 4, Wyd. Politechniki Gdańskiej, 1994.
[7] Ronkowski M., Michna M., Kostro G., Kutt F.: Maszyny elektryczne wokół nas: zastosowanie,
budowa, modelowanie, charakterystyki, projektowanie. (e-skrypt). Wyd. PG, Gdańsk, 2011.
http://pbc.gda.pl/dlibra/docmetadata?id=16401&from=&dirids=1&ver_id=&lp=2&QI=
[8] Roszczyk S.: Teoria maszyn elektrycznych. WNT, W-wa 1979.
[9] Staszewski P., Urbański W.: Zagadnienia obliczeniowe w eksploatacji maszyn elektrycznych,
Warszawa, Oficyna Wydawnicza Politechniki Warszawskiej 2009.
[10] PN-IEC 34-1:1997 Maszyny elektryczne wirujące. Ogólne wymagania i badania:
http://www.pkn.pl/
Wyszukiwarka
Podobne podstrony:
Lab ME MS instrukcja 2012 E id Nieznany
Lab ME TR instrukcja 2012 E id Nieznany
Lab ME MI2 instrukcja 2012 E
Lab ME MI1 instrukcja 2012 E
Lab ME MPS instrukcja 2012 E
Lab ME MS instrukcja 2012 E
Lab ME MPS instrukcja 2012 E
Lab ME TR instrukcja 2011 2012 Nieznany
Lab 06 Instrukcje sterujace id Nieznany
Lab ME SPS instrukcja 2011 2012 E
Lab ME MI instrukcja 2011 2012 E
Lab 06 Instrukcje sterujace id Nieznany
Lab ME MI instrukcja 2011 2012 E
CA 6 instrukcja uzytkownika id Nieznany
Zenit 11 Instrukcja Obslugi id Nieznany
Egzamin z ekologii zima 2012 id Nieznany
673 UG ZWP L Pawlowicz 2012 id Nieznany (2)
więcej podobnych podstron