
Instrukcja do ćwiczenia nr 8 z Laboratorium Automatyki
1
Ćwiczenie 8.
Joystick force-feedback
Instrukcja do ćwiczenia nr 8 z Laboratorium Automatyki
2
Wstęp.
W skład stanowiska laboratoryjnego wchodzi:
–
komputer PC z oprogramowaniem Matlab/Simulink pozwalający na wykonanie pomiarów oraz realizację
algorytmu sterowania,
–
joystick Logitech Force 3D Pro będący obiektem sterowania,
–
joystick Logitech Extreme 3D Pro służący jako źródło sygnału zadanego.
Joystick Logitech Force 3D Pro posiada funkcję siłowego sprzężenia zwrotnego (force feedback) – pozwala on
nie tylko na pomiar położenia rękojeści, ale może także wywierać pewną siłę – wystarczającą do poruszania swobodną
rękojeścią w dwóch wymiarach.
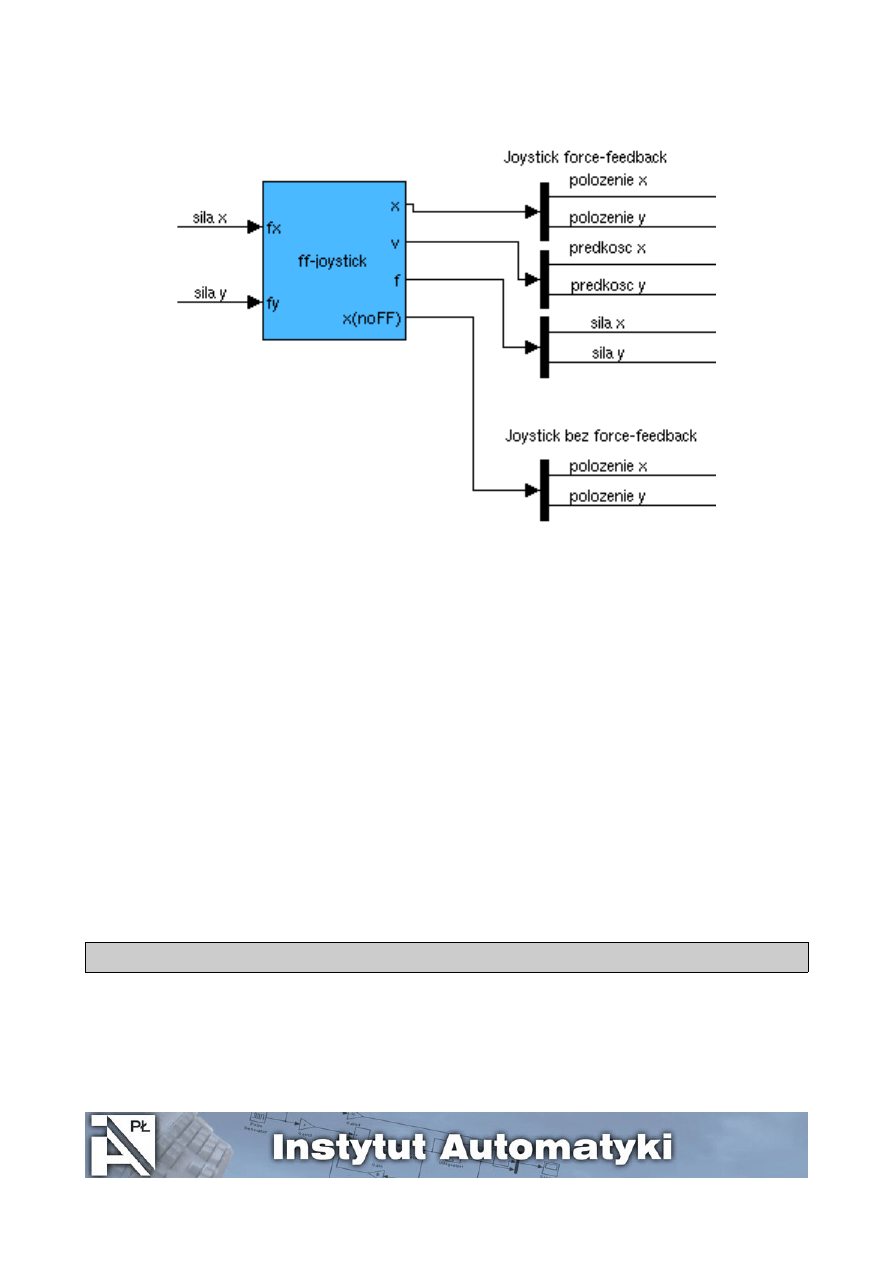
Współpracę z joystickem z poziomu Simulinka umożliwia blok ff-joystick pokazany na rysunku 2. Sygnałami
wejściowymi dla bloku są wartość siły w osi x oraz siły w osi y. Sygnały wyjściowe to położenie joysticka (port
oznaczony jako „x”), prędkość („v”) i wywierana siła („f”) oraz położenie drugiego joysticka (bez sprzężenia siłowego,
port oznaczony jako "x(noFF)"). Sygnały te zawierają dwie współrzędne – dla osi x i y. Przyjęto, że oś x odpowiada
wychyleniom w lewo/prawo, oś y – wychyleniom do przodu/do tyłu. Aby rozdzielić sygnał na dwie współrzędne należy
skorzystać z bloku demux (położenia wykorzystywanych bloków w bibliotece Simulinka podano na końcu instrukcji),
co pokazano na rysunku.
Rysunek 1. Stanowisko laboratoryjne. Po prawej joystick z force-feedback
Instrukcja do ćwiczenia nr 8 z Laboratorium Automatyki
3
Rysunek 2. Blok ff-joystick oraz sygnały wejściowe i wyjściowe
Zakresy wartości poszczególnych sygnałów wynoszą:
–
dla położenia – wartości całkowite od -1000 do +1000, co odpowiada wychyleniu o około 15 stopni
odpowiednio w lewo i prawo / do przodu i do tyłu,
–
dla sił w obu osiach – wartości całkowite od -10000 do +10000,
–
prędkość obliczana jest przy pomocy filtru Golay'a-Savitzky'ego i przyjmuje wartości z zakresu
± 1.6 ⋅ 10
4.
.
Uwaga. Działanie algorytmu w Simulinku zawierającego blok ff-joystick jest spowolnione w taki sposób, by
czas symulacji odpowiadał czasowi rzeczywistemu. Komunikacja z joystickiem wykonywana jest co 1/100 sekundy,
stąd w parametrach symulacji (menu Simulation, polecenie Configuration parameters) należy wybrać Type: Fixed-step
oraz Fixed-step size: sampletime. (zmienna sampletime powinna zostać zdefiniowana w Matlabie przed uruchomieniem
bloku ff-joystick, wartość: 0.01).
Blok ff-joystick komunikuje się z joystickiem korzystając z dodatkowego programu ff-const (skrót na
pulpicie). Program ten należy uruchomić i pozostawić działający w tle przez cały czas wykonywania ćwiczenia.
Po uruchomieniu Matlaba należy w linii wpisać polecenie:
start_joy
Zadanie 0. Zapoznać się z działaniem stanowiska laboratoryjnego:
–
uruchomić program ff-const,
–
uruchomić Matlab i Simulink (w Matlabie wpisać polecenie Simulink),
Instrukcja do ćwiczenia nr 8 z Laboratorium Automatyki
4
–
utworzyć nowy model (w oknie Simulinka: File > New > Model),
–
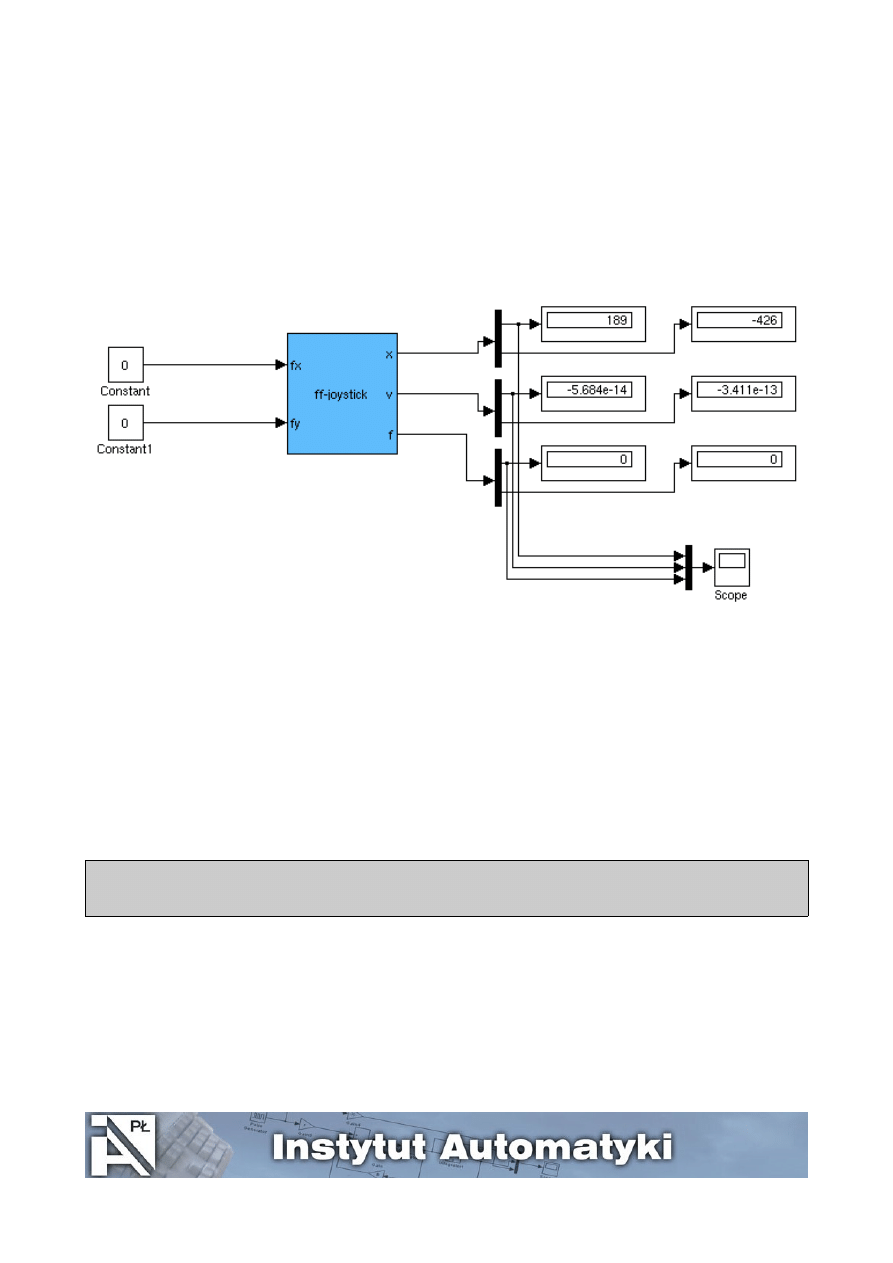
z odpowiednich bloków złożyć schemat pokazany na rysunku 3,
–
ustawić parametry symulacji zgodnie z informacjami podanymi powyżej, wpisać czas zakończenia symulacji
(Stop time) jako inf,
–
uruchomić symulację, zbadać zakresy uzyskiwanych wartości oraz możliwości zadania siły (zmienić wartość
w bloku Constant lub Contant1 na różną od zera, np. 2000).
Zadanie 1. Wyznaczenie odpowiedzi skokowej obiektu.
–
zmodyfikować schemat z poprzedniego zadania, tak by zadawana w osi x siła zmieniała się skokowo od
wartości zero do wybranej wartości z zakresu 0-10000,
–
schemat uzupełnić o blok To Workspace (w ustawieniach bloku wybrać rodzaj danych: Structure with time),
–
ustawić joystick w położeniu zerowym (lub bliskim zera) w obu osiach,
–
uruchomić symulację i zatrzymać po skoku,
–
w Matlabie wykreślić przebieg siły i położenia joysticka w osi x w funkcji czasu:
plot( odp.time, odp.signals.values(:,1), 'r', odp.time,
odp.signals.values(:,2), 'b' )
–
sprawdzić jak zależy kształt uzyskiwanej odpowiedzi od amplitudy skoku?
Zadanie 2. Wyznaczanie charakterystyki statycznej.
Pomiary z siłą zadawaną ręcznie:
–
zbudować schemat edytorze Simulink pozwalający na zadawanie dowolnej siły i wykorzystać go do
wyznaczenia 10-20 punktów charakterystyki statycznej joysticka (dla jednej osi)
Rysunek 3.Schemat Simulinka do Zadania 0
Instrukcja do ćwiczenia nr 8 z Laboratorium Automatyki
5
–
punkty wpisać do Matlaba jako macierz i wykreślić poleceniem plot
Automatyczne wyznaczanie charakterystyki:
–
zbudować schemat Simulinka, w którym generowany jest sygnał prostokątny (okres 2s, wypełnienie 50%) o
rosnącej amplitudzie, np. 200, 400, 600, itd. (Można skorzystać np. z bloków Ramp, Quantizer, Pulse
Generator oraz Product)
–
wygenerowany sygnał podać jako siłę w osi x joysticka
–
zarejestrować w Matlabie zadawaną siłę oraz uzyskiwaną pozycję joysticka (blok To Workspace – zmienić
nazwę zmiennej z "simout" na "pomiar", rodzaj zmiennej: Structure with time)
–
skorzystać z pliku steady_char do uzyskania punktów charakterystyki statycznej:
[sU,sY] =steady_char( pomiar.signals.values(:,1), pomiar.signals.values(:,2) )
–
powtórzyć pomiary dla ujemnych wartości siły
Zadanie 3. Wyznaczanie charakterystyki częstotliwościowej.
–
schemat z poprzedniego zadania zmodyfikować tak by zadawana była siła o przebiegu sinusoidalnym
–
ustalić wartość amplitudy, która zapewnia jak najmniej zniekształcony sygnał na wyjściu
–
po wykonaniu pomiaru skorzystać z pliku sin_analyz do wyznaczenia amplitudy (ampl), przesunięcia
fazowego (phi) i okresu (period) sygnału wyjściowego:
[ampl, phi, period] = sin_analyz( pomiar.time, pomiar.signals.values(:,1),
pomiar.signals.values(:,2) );
–
pomiary wykonać dla różnych częstotliwości – pamiętając, że próbkowanie jest z okresem 10ms
–
wykreślić charakterystyki:
–
logarytmiczną amplitudową i fazową (Bodego),
–
amplitudowo-fazową (Nyquista)
–
uwaga: w celu poprawienia dokładności działania programu sin_analyz można usunąć początkową część
zmierzonego przebiegu, np.: (usuwa początkowe 3 sekundy z pomiaru typu Structure with time)
pomiar = przytnij( pomiar, 3 );
Zadanie 4. Wyznaczanie prędkości
–
zbudować układ pozwalający na obserwowanie prędkości joysticka obliczanej przy pomocy:
a) bloku Derivative z biblioteki Continuous
b) bloku Discrete Derivative z biblioteki Discrete (tylko Matlab >6.5)
c) bloku o transmitancji:

Instrukcja do ćwiczenia nr 8 z Laboratorium Automatyki
6
G
s=
sT
1sT / N
(1)
d) filtru Golaya-Savitzkiego (wyjście v bloku ff-joystick)
–
sprawdzić działanie poszczególnych metod w zależności od parametrów
–
wybrać metodę do dalszych badań – wybór uzasadnić
Zadanie 5. Dobór parametrów regulatora PID przy pomocy metody Zieglera-Nicholsa
–
zbudować układ, w którym szeregowe połączenie regulatora PID oraz bloku ff-joystick obwiedzione jest
sprzężeniem zwrotnym zawierającym blok Unit Delay (biblioteka Discrete, należy pamiętać o zmienieniu
wartości Sample time w ustawieniach bloku). Jako wartość zadaną należy podać zero. Regulator PID należy
zbudować jako równoległe połączenie elementu proporcjonalnego (wzmocnienie Kp), różniczkującego
(prędkość poprzez blok Gain o wzmocnieniu Kp*Td) i całkującego (wzmocnienie Kp/Ti). Można także
skorzystać z bloku PID controller (with Approximate Derivative) jeśli jest dostępny (prędkość wyznaczana jest
wówczas metodą c). Uwaga: w gotowym blok PID występuje interakcja, a parametry transmitancji to Kp, Ki i
Kd – nastawy uzyskane w sposób opisany poniżej należy odpowiednio przeliczyć!
–
wyznaczyć minimalną wartość wzmocnienia K
c
, przy której występują w układzie drgania nietłumione (uwaga
– do powstania drgań w układzie konieczne jest wcześniejsze wytrącenie go ze stanu równowagi)
–
wyznaczyć przybliżony okres drgań T
c
–
sprawdzić działanie regulatorów (zgodnie z Z-N):
–
P: K
p
= 0.5*K
c
–
PI: K
p
= 0.45*K
c
, T
i
= T
c
/ 1.2
–
PID: K
p
=0.6*K
c
; T
i
=T
c
/ 2; T
d
= T
c
/ 8
–
sprawdzić działanie układu regulacji dla różnych przebiegów (wartości i kształtów) sygnału zadanego
–
zbadać zachowanie układu regulacji w przypadku wystąpienia długotrwałego zakłócenia:
–
odchylić joystick do położenia skrajnego i natychmiast puścić, obserwować przebiegi przejściowe
–
odchylić joystick do położenia skrajnego i puścić po trzech sekundach, obserwować przebiegi
przejściowe. Z czego wynika zachowanie układu?
–
wykreślić sygnały wyjściowe poszczególnych części regulatora PID
–
w elemencie całkującym wprowadzić ograniczenie wartości (upper i lower saturation limit),
sprawdzić działanie układu w zależności od poziomu ograniczenia
–
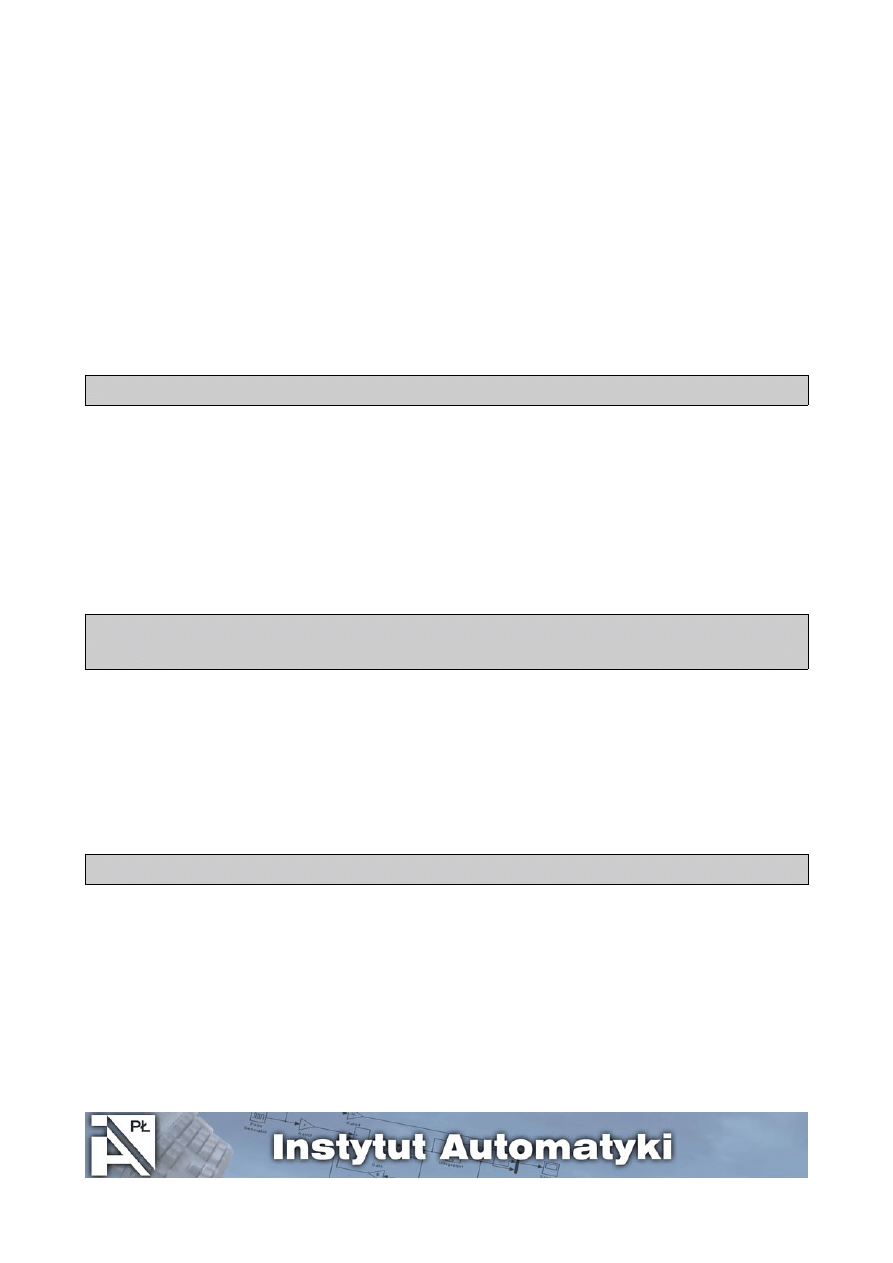
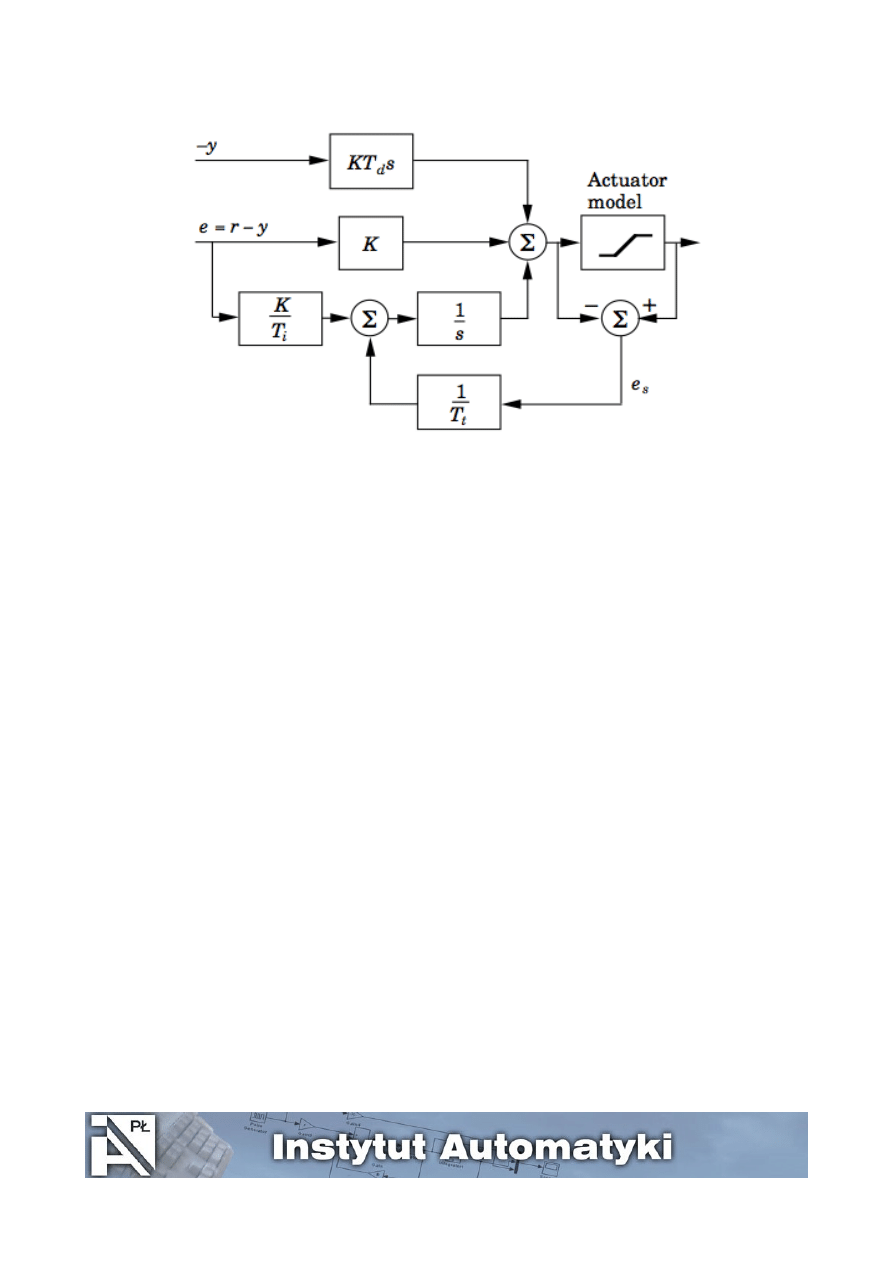
zamiast ograniczenia wartości integratora wprowadzić tzw. Anty Windup wg schematu pokazanego
na rysunku 4 (jako blok "Actuator model" zastosować blok Saturation z biblioteki Discontinuities).
Instrukcja do ćwiczenia nr 8 z Laboratorium Automatyki
7
Zadanie 6. Ruch w obu osiach
–
przeprowadzić strojenie regulatora dla ruchu w osi y
–
zbudować schemat zawierający układy regulacji dla obu osi, jako źródło sygnału zadanego podać położenie
drugiego joysticka.
Bloki Simulinka wykorzystywane w ćwiczeniu:
–
Step, Ramp, Pulse Generator -Simulink > Sources >
–
Constant – Simulink > Sources >
–
Sum, Product – Simulink > Math >
–
Mux, Demux – Simulink > Signal routing >
–
ff-joystick – Force Feedback Joystick >
–
Integrator, Derivative – Simulink > Continuous >
–
Transfer Fcn – Simulink > Continuous >
–
PID Controller (with Approximate Derivative) – Simulink Extras > Additional linear >
–
Saturation, Quantizer – Simulink > Nonlinear >
–
To Workspace, Scope, Display – Simulink > Sinks >
–
Gain – Simulink > Math >
Rysunek 4. Schemat układu z regulatorem PID i anty-windup. Wartość stałej T
t
to 0.5T
i
dla
regulatora PI oraz sqrt(T
i
T
d
) dla PID
Document Outline
Wyszukiwarka
Podobne podstrony:
A ET cw 9 jakosc i korekcja
A ET cw 7 Fanuc
A ET cw 6 MRJ3A id 49207 Nieznany (2)
A ET cw 7 Fanuc
A ET cw 9 jakosc i korekcja
A ET cw 7 Fanuc
ET grupa c3 wyniki doświadczenia z ćw. 2, ZIP SGGW, Eksploatacja techniczna; Maszyny; Technologia pr
ćw 4 Profil podłużny cieku
biofiza cw 31
Kinezyterapia ćw synergistyczne
Cw 1 ! komorki
Pedagogika ćw Dydaktyka
Cw 3 patologie wybrane aspekty
Cw 7 IMMUNOLOGIA TRANSPLANTACYJNA
więcej podobnych podstron