Z. Kąkol-Notatki do Wykładu z Fizyki
Wykład 12
12. Ruch obrotowy
12.1 Wstęp
Mówiąc o środku masy wspominaliśmy o ruchu obrotowym oraz o toczeniu się ciał.
Dużym ułatwieniem w analizie układów cząstek jest możliwość rozpatrywania oddziel-
nego ruchu postępowego i ruchu obrotowego. Aby wprowadzić to uproszczenie zdefi-
niujemy dwie nowe wielkości:
moment pędu
i
moment siły
. Zasada zachowania momen-
tu pędu jest równie istotna jak zasada zachowania pędu i zasada zachowania energii.
12.2 Kinematyka ruchu obrotowego
Musi w pierwszym kroku wypracować ujęcie matematyczne dla ruchu obrotowego.
Dla ruchu obrotowego wielkością analogiczną do przesunięcia jest
przesunięcie kąto-
we
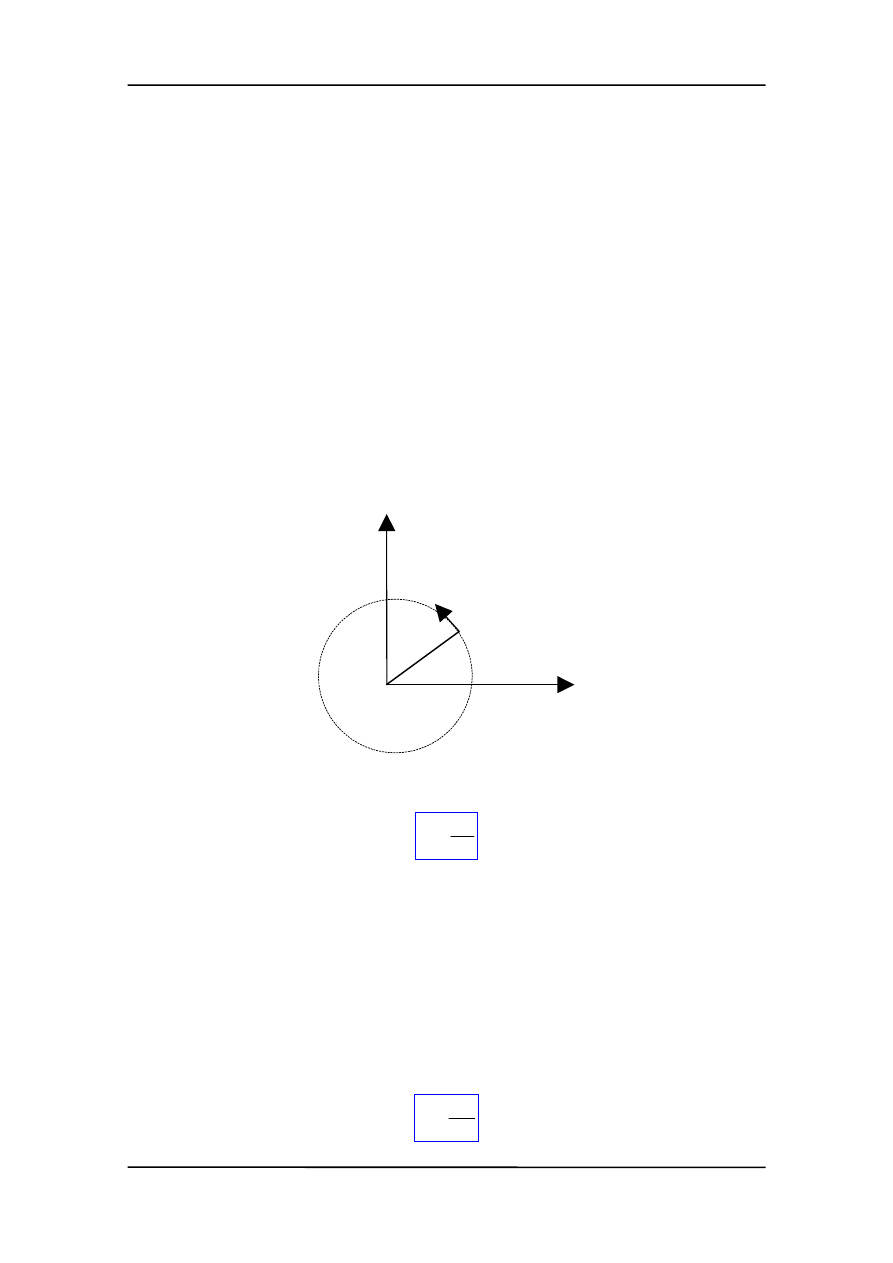
θ. Kąt θ określa położenie punktu względem układu odniesienia. Dla ruchu po okrę-
gu, z definicji miary łukowej kąta
θ = S/R. (w radianach).
θ
R
S
Kątową analogią prędkości
v = dx/dt jest
prędkość kątowa
ω.
t
d
d
θ
ω =
(12.1)
Dla ruchu po okręgu
v
= ω R.
W przypadku ruchu jednostajnego po okręgu
ω jest nazywane
częstością kątową
i jest
związana z częstotliwością f relacją
ω = 2πf
Podobnie jak przyspieszenie liniowe a = d
v
/dt zostało zdefiniowane przyspieszenie ką-
towe
α.
t
d
d
ω
α =
(12.2)
12-1
Z. Kąkol-Notatki do Wykładu z Fizyki
Dla ruchu po okręgu związek pomiędzy a i
α jest analogiczny do związku pomiędzy
v
i
ω tzn. a = αR. Możemy teraz np. podać opis ruchu obrotowego ze stałym przyspiesze-
niem
α poprzez analogię do ruchu postępowego jednostajnie zmiennego.
Ruch postępowy Ruch
obrotowy
a = const
v
=
v
0
+ at
s = s
0
+
v
0
t + (1/2)at
2
α = const
ω = ω
0
+
αt
θ =θ
0
+
ω
0
t + (1/2)
αt
2
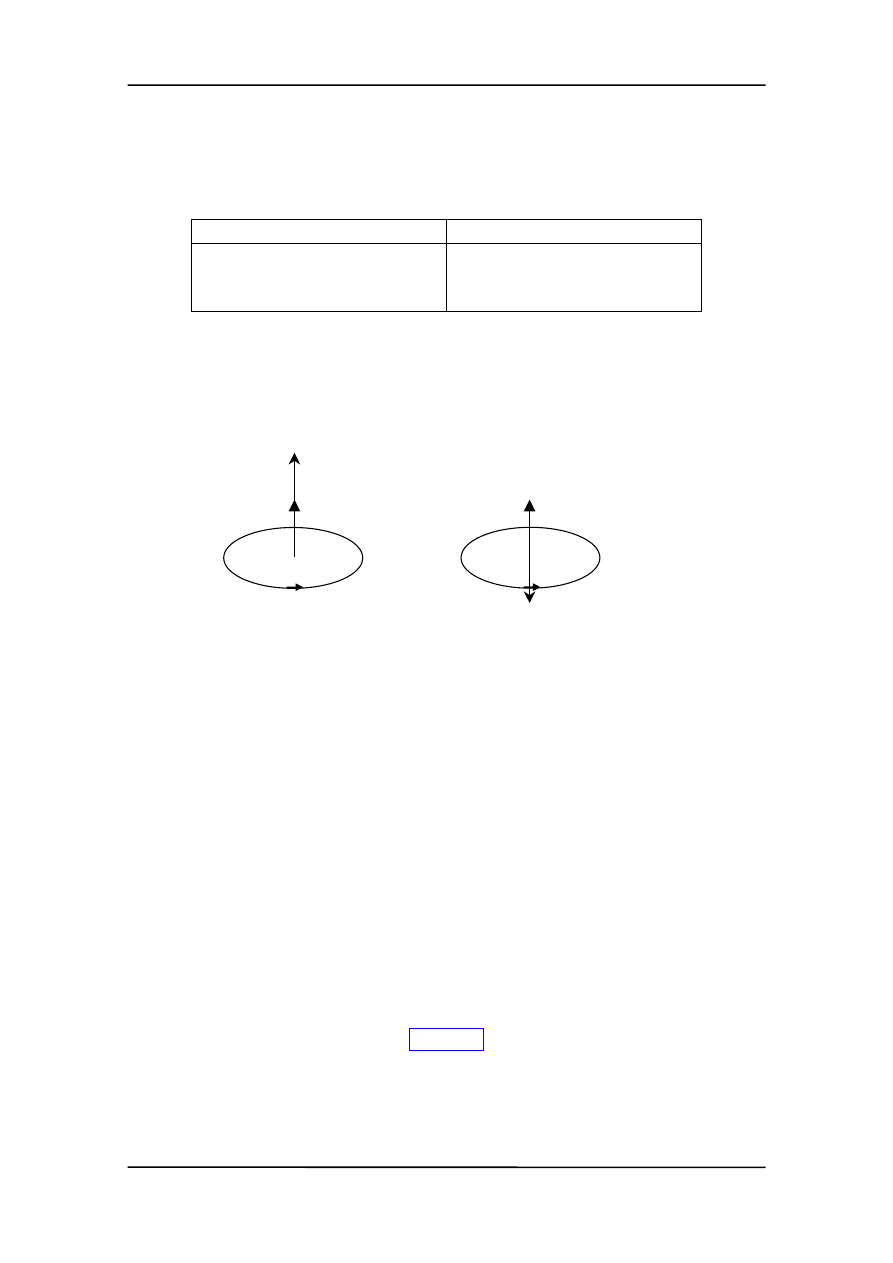
Kierunek i zwrot wektorów prędkości kątowej
ω i przyspieszenia kątowego α w ruchu
obrotowym przyspieszonym (1) i opóźnionym (2) są pokazane na rysunku poniżej.
ω
α
ω
α
1)
2)
12.3 Dynamika ruchu obrotowego
12.3.1 Moment siły
W ruchu postępowym siłę wiążemy z liniowym przyspieszeniem ciała. Jaką wiel-
kość będziemy wiązać z przyspieszeniem kątowym?
Nie może być to tylko siła bo jak pokazuje doświadczenie np. z otwieraniem drzwi
przyspieszenie kątowe zależy od tego gdzie i pod jakim kątem jest przyłożona siła. W
szczególności siła przyłożona w miejscu zawiasów zarówno wzdłuż jak i prostopadle
do nich nie wytwarza żadnego przyspieszenia. Natomiast siła przyłożona do drzwi na
ich zewnętrznej krawędzi i pod kątem prostym nadaje im maksymalne przyspieszenie.
Dla ruchu obrotowego odpowiednikiem siły w ruchu postępowym jest
moment siły
(tzw. moment obrotowy)
τ.
Jeżeli siła F działa na cząstkę to moment siły jest definiowany jako
F
r
τ
×
=
(12.3)
gdzie wektor r reprezentuje położenie cząstki względem wybranego inercjalnego ukła-
du odniesienia. Moment siły jest wielkością wektorową, której wartość bezwzględna
12-2
Z. Kąkol-Notatki do Wykładu z Fizyki
wynosi:
τ = rFsinθ (iloczyn wektorowy). Wielkość r nazywamy ramieniem siły (widać,
że bierzemy albo r
⊥
albo F
⊥
).
12.3.2 Moment pędu
Zdefiniujmy teraz wielkość, która w ruchu obrotowym odgrywa rolę analogiczną do
pędu. Wielkość L będziemy nazywać
momentem pędu
i definiujemy ją
p
r
L
×
=
(12.4)
gdzie p jest pędem cząstki, a r reprezentuje położenie cząstki względem wybranego in-
ercjalnego układu odniesienia. Wartość L wynosi rpsin
θ i analogicznie do momentu siły
wielkość rsin
θ nazywamy ramieniem pędu.
Istnieje bezpośrednia zależność pomiędzy momentem siły i momentem pędu. Zacznij-
my od znanej zależności, że siła F = dp/dt (dla pojedynczej cząstki). Mnożąc wektoro-
wo obie strony przez r otrzymujemy
t
d
d p
r
F
r
×
=
×
F
r ×
jest momentem siły
τ więc
t
d
d p
r
τ
×
=
(12.5)
Teraz przechodzimy do równania na moment pędu L = r
×p i różniczkujemy je obu-
stronnie względem czasu, otrzymując
t
t
t
t
d
d
d
d
d
)
d(
d
d
p
r
p
r
p
r
L
×
+
×
=
×
=
ponieważ dr/dt =
v więc
t
m
t
d
d
)
(
d
d
p
r
L
×
+
×
=
v
v
Wiemy, że v
= 0 (z definicji iloczynu wektorowego), więc
v
m
×
t
t
d
d
d
d
p
r
L
×
=
(12.6)
Porównanie równań (12.5) i (12.6) prowadzi do wniosku, że
t
d
d L
τ
=
(12.7)
12-3
Z. Kąkol-Notatki do Wykładu z Fizyki
Widzimy, że wypadkowy moment siły działający na cząstkę jest równy prędkości
zmian momentu pędu tej cząstki.
12.3.3 Zachowanie momentu pędu
Dla układu n cząstek możemy zsumować równanie (12.7) po wszystkich cząstkach
t
t
wypadkowy
i
i
i
i
d
d
d
d
L
L
τ
=
=
∑
∑
(12.8)
Zauważmy, że jeżeli na układ nie działa zewnętrzny moment siły (lub suma = 0) to
moment pędu układu pozostaje stały.
.
const
0
d
d
=
⇒
=
wypadkowy
wypadkowy
t
L
L
Przykład 1
Osoba stoi na stoliku obrotowym i w obu rękach trzyma hantle, mając rozłożone
ramiona. Popychamy ją, tak aby obracała się z częstotliwością f
1
= 0.5 obrotów na se-
kundę. Wtedy osoba zgina ramiona, przyciągając hantle do tułowia. Jaka jest częstotli-
wość jej obrotów? Załóżmy, że hantle początkowo znajdujące się 80 cm od osi obrotu,
zostają ściągnięte do odległości 10 cm od osi. Masa hantli jest taka, że obracająca się
osoba ma taki sam moment pędu jak hantle w odległości 80 cm od osi obrotu.
Początkowo moment pędu hantli wynosi
L
h1
= R
1
m
v
1
= R
1
m(
ω
1
R
1
) = m
ω
1
(R
1
)
2
dzie m jest masą pary hantli. Moment pędu układu osoba-hantle wynosi więc
L
1
= L
o1
+ m
ω
1
(R
1
)
2
onieważ L
o1
= L
h1
więc L
o1
= m
ω
1
(R
1
)
2
.
kładu wynosi
L
2
= L
o2
+ m
ω
2
(R
2
)
2
tosując zasadę zachowania pędu otrzymujemy
L
1
= L
2
czyli:
L
o1
+ m
ω
1
(R
1
)
2
= L
o2
+ m
ω
2
(R
2
)
2
amiętając, że L
o2
= L
o1
ω
2
/
ω
1
ponieważ L
∼
ω rozwiązujemy to równanie względem ω
2
g
P
Dla hantli w odległości R
2
moment pędu u
S
P
12-4
Z. Kąkol-Notatki do Wykładu z Fizyki
2
2
2
1
2
1
1
2
2
R
R
R
+
=
ω
ω
ω
2
= 1.97
ω
1
Prędkość obrotów rośnie dwukrotnie.
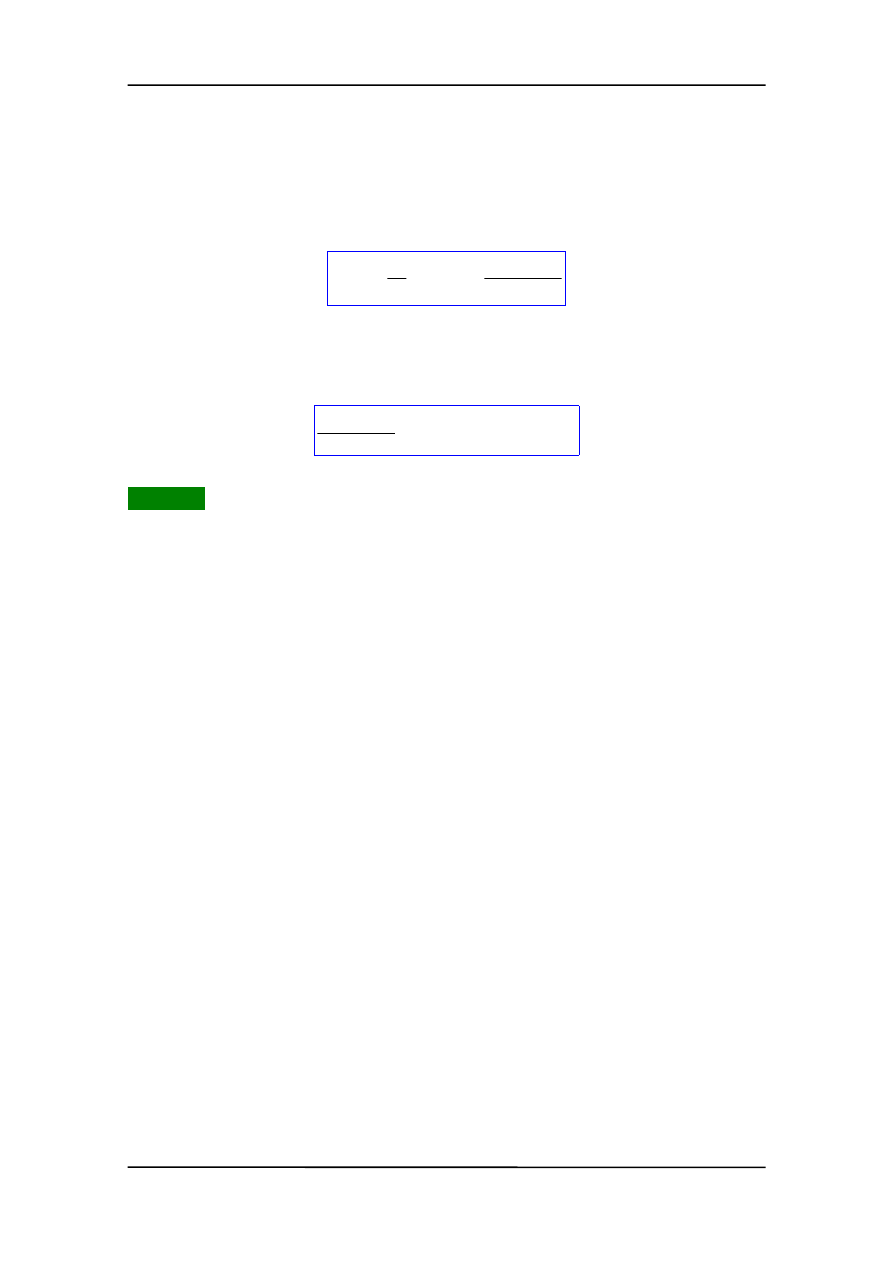
Przykład 2
Rower jedzie ze stałą prędkością gdy siła działająca pomiędzy nawierzchnią i kołem
F
2
= 4 N. Z jaką siłą F
1
łańcuch musi ciągnąć zębatkę jeżeli stosunek R
2
/R
1
= 10?
R
1
R
2
F
1
F
2
Ponieważ prędkość kątowa jest stała więc dL/dt = 0 i co za tym idzie
τ
wypadkowy
= (
τ
1
-
τ
2
) = 0
czyli
τ
1
=
τ
2
Stąd
R
1
F
1
= R
2
F
2
więc
F
1
= (R
2
/R
1
)F
2
= 40N
12.4 Ciała sztywne i moment bezwładności
Większość mas w przyrodzie to nie cząstki tylko rozciągłe ciała stałe, które mogą
wykonywać zarówno ruch postępowy jak i obrotowy. Przez ciała stałe, sztywne, rozu-
miemy ciała, w których odległość między dwoma wybranymi elementami pozostaje sta-
ła.
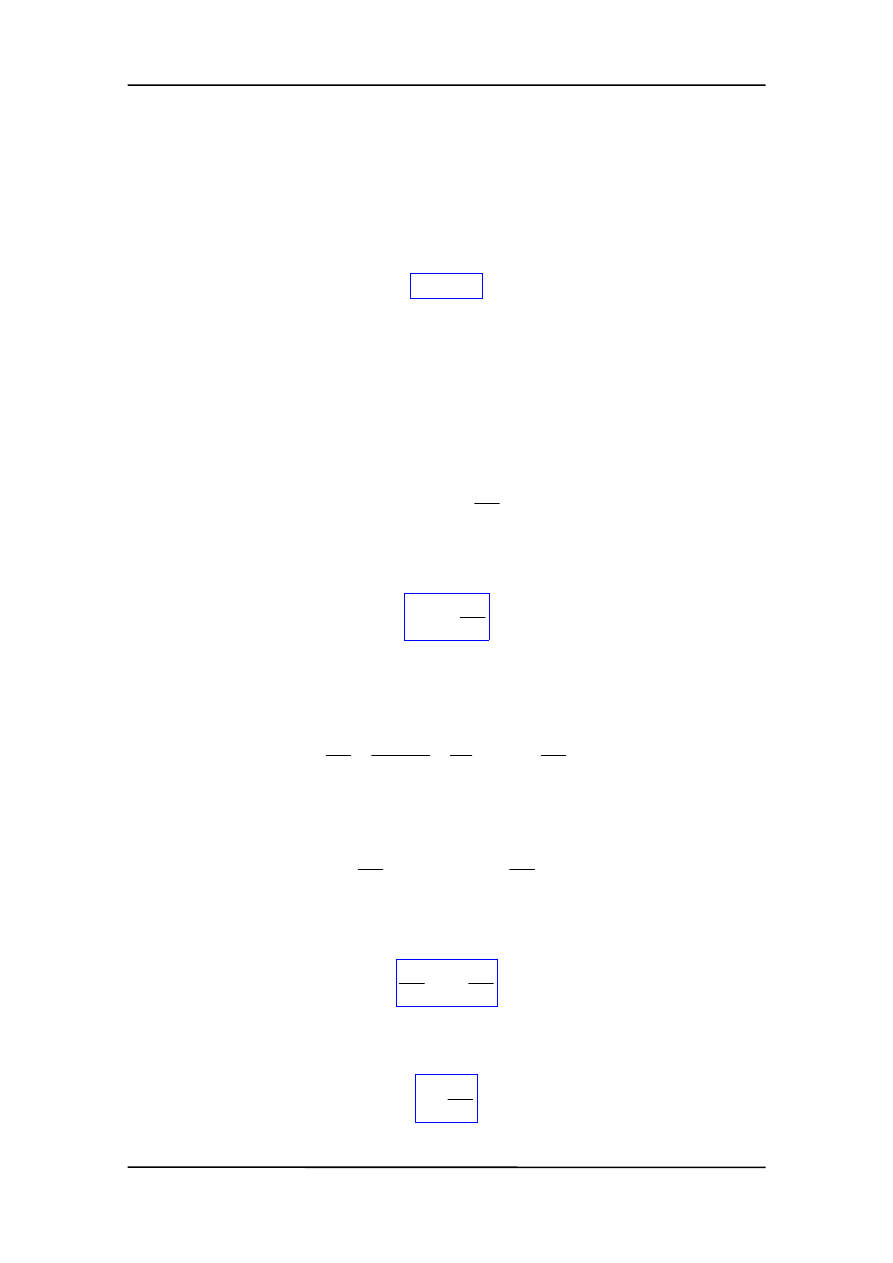
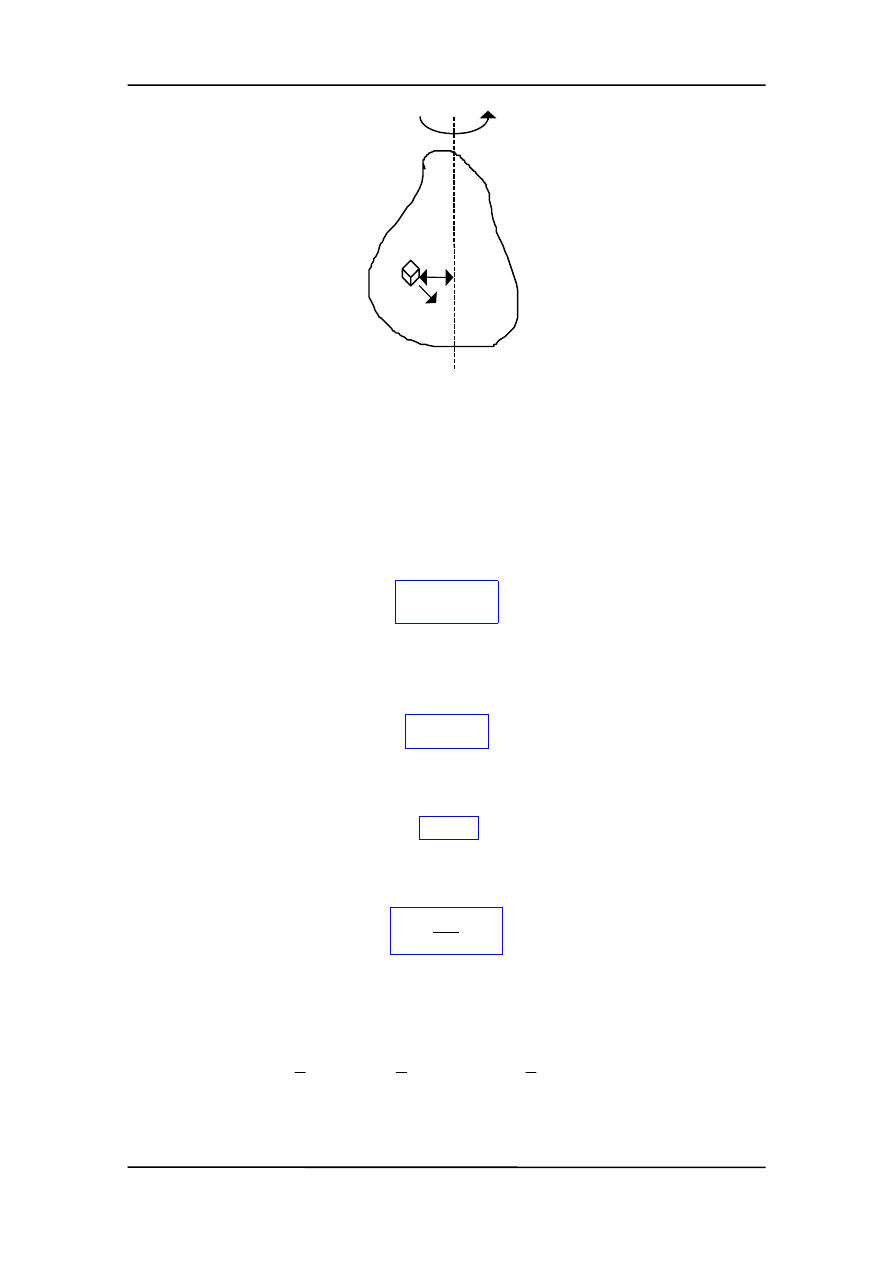
Przeanalizujmy ruch takiej bryły obracającej się ze stałą prędkością kątowa
ω wokół
stałej osi w układzie środka masy (rysunek). Zauważmy, że różne części ciała mają róż-
ną prędkość liniową
v
chociaż tą samą kątową
ω. Dla potrzeb opisu ciało możemy po-
dzielić na elementy o masie
∆m
i
odległe od osi obrotu o r
i
. Wtedy prędkość takiego
elementu wynosi
v
i
= r
i
ω.
12-5
Z. Kąkol-Notatki do Wykładu z Fizyki
∆m
i
r
i
v
i
ω
Wartość momentu pędu L tego ciała można obliczyć
ω
ω
∆
=
∆
=
∆
=
∑
∑
∑
i
i
i
i
i
i
i
i
i
i
i
m
r
r
m
r
m
r
L
2
)
(
v
Wielkość w nawiasie nazywamy
momentem bezwładności
I, który definiujemy jako
∑
∆
=
i
m
r
I
i
i
2
a dla ciągłego rozkładu masy mamy
∫
=
m
r
I
d
2
(12.9)
Zwróćmy uwagę, że I zależy od osi obrotu. Możemy teraz zapisać moment pędu
L = I
ω
(12.10)
a ponieważ
τ = dL/dt więc
α
ω
τ
I
t
I
=
=
d
d
(12.11)
Energia kinetyczna w układzie środka masy
2
2
2
2
2
1
)
(
2
1
2
1
ω
ω
∑
∑
∑
∆
=
∆
=
∆
=
i
i
i
i
i
i
i
i
i
k
r
m
r
m
m
E
v
więc
12-6
Z. Kąkol-Notatki do Wykładu z Fizyki
2
2
1 ω
I
E
k
=
(12.12)
Zestawmy teraz obliczone wielkości z ich odpowiednikami dla ruchu postępowego.
Ruch postępowy Ruch
obrotowy
p = m
v
F = ma
E
k
= (1/2) m
v
2
L= I
ω
τ = Iα
E
k
= (1/2)I
ω
2
Teraz widzimy, że moment bezwładności I jest analogiczną wielkością do masy m w
ruchu postępowym. Chociaż masa ciała nie zależy od jego położenia to moment bez-
władności zależy od osi, wokół której obraca się ciało. Momenty bezwładności niektó-
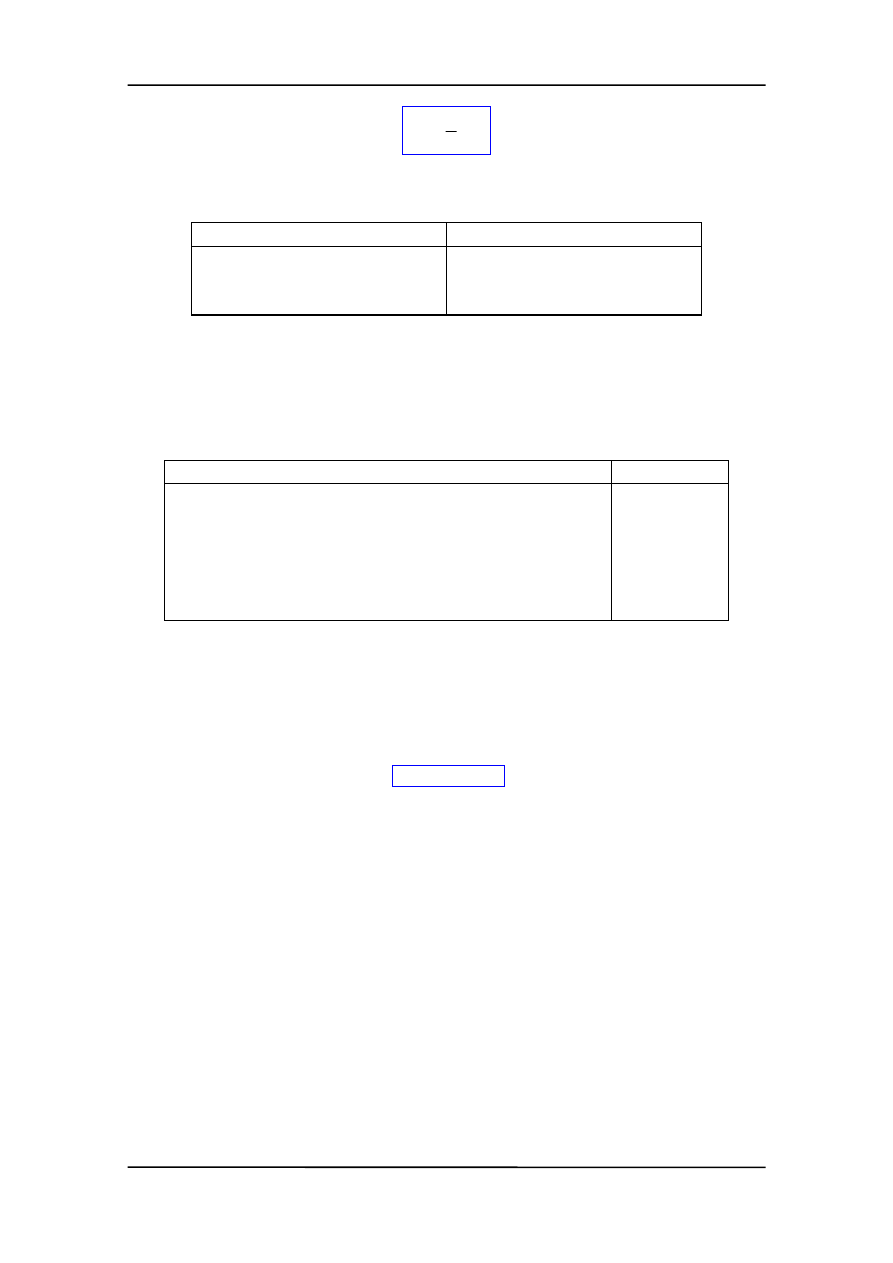
rych ciał są podane w tabeli.
Ciało I
Obręcz, pierścień względem osi
⊥ przez środek
Krążek, walec względem osi
⊥ przez środek
Pręt wokół osi
⊥ przez środek
Pręt wokół osi
⊥ przez koniec
Pełna kula wokół osi przez środek
Czasza kulista wokół osi przez środek
mR
2
mR
2
/2
ml
2
/12
ml
2
/3
2mR
2
/5
2mR
2
/3
Często do obliczania momentu bezwładności wygodnie jest posłużyć się twierdze-
niem Steinera. Podaje ono zależność pomiędzy momentem bezwładności I ciała wzglę-
dem danej osi, a momentem bezwładności I
śr.m.
tego ciała względem osi przechodzącej
przez jego środek masy i równoległej do danej.
I = I
śr.m.
+ md
2
(12.13)
gdzie m jest masą ciała, a d odległością pomiędzy osiami.
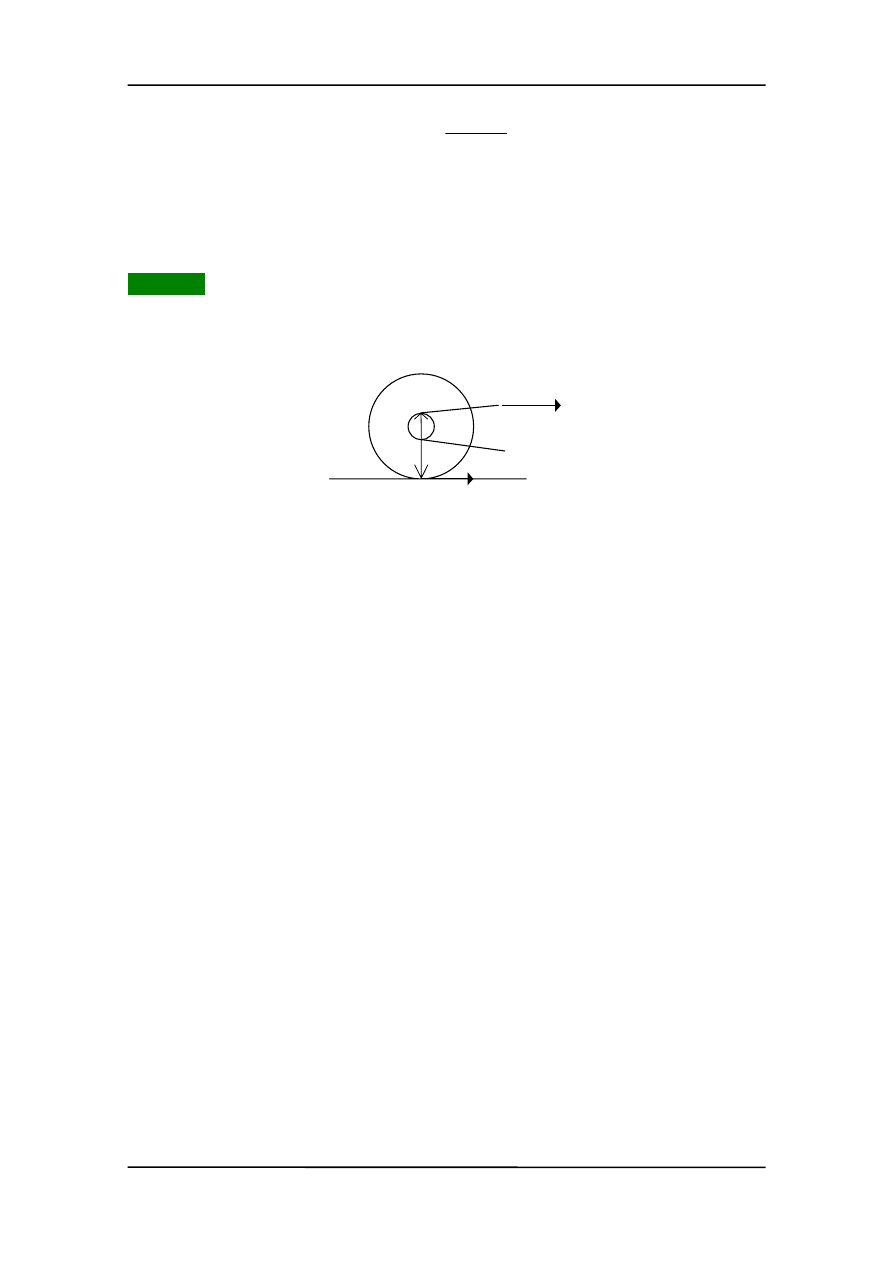
12.5 Ruch
postępowo-obrotowy ciała sztywnego
Rozpatrywaliśmy ruch obrotowy ciała względem osi nieruchomych. Jednakże gdy
ciało się toczy to wykonuje zarówno ruch postępowy, jak i obrotowy. Dlatego też to-
czenie możemy traktować jako złożenie ruchu postępowego i obrotowego tak jak poka-
zano to na rysunku poniżej dla toczącego się walca.
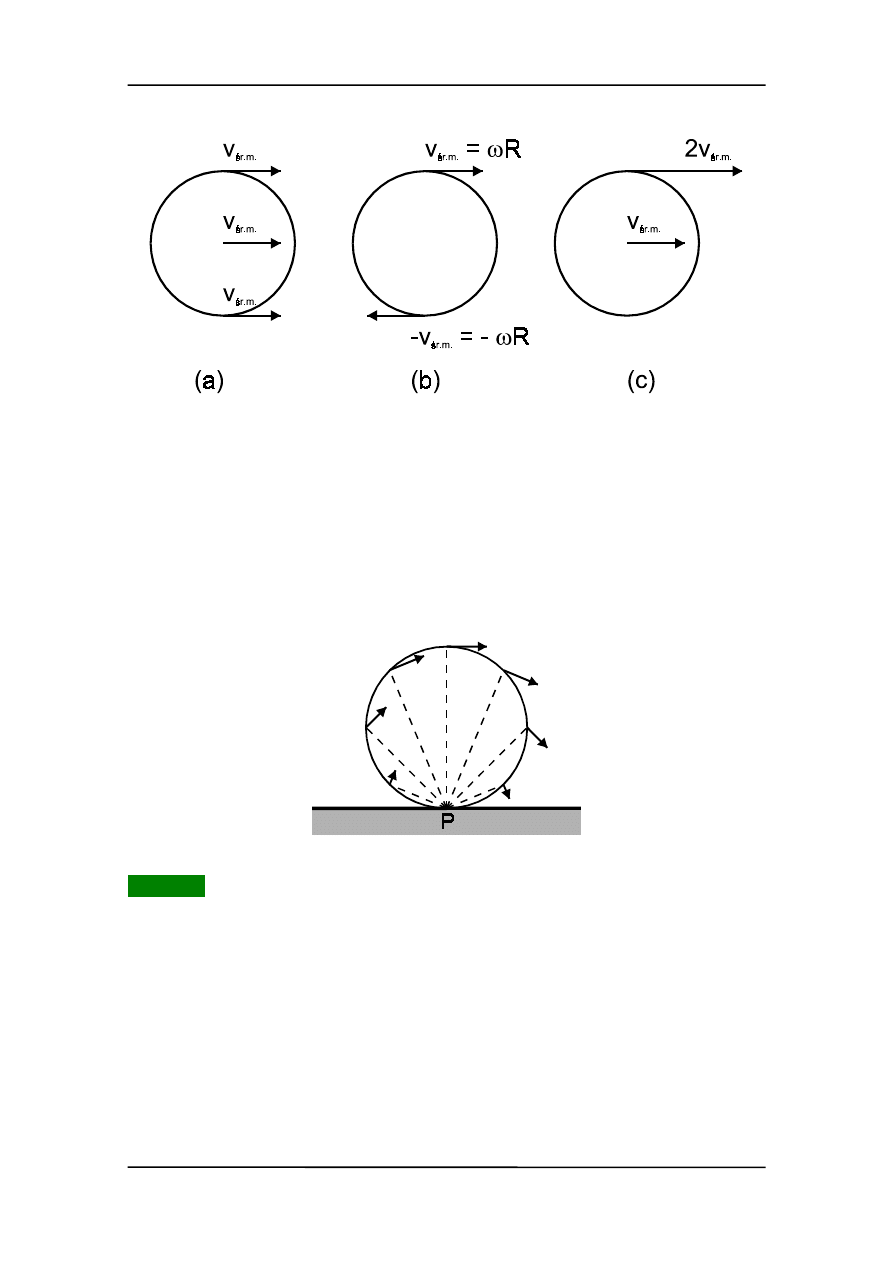
W ruchu postępowym, rysunek (a), wszystkie punkty poruszają się z takimi samymi
prędkościami, natomiast w ruchu obrotowym, rysunek (b), przeciwległe punkty poru-
szają się z przeciwnymi prędkościami, a środek jest nieruchomy. Na rysunku (c) poka-
zano wynik złożenia (sumowania) odpowiednich wektorów z rysunków (a) i (b).
12-7
Z. Kąkol-Notatki do Wykładu z Fizyki
Zwróćmy uwagę, że podstawa walca (punkt P styczności z podłożem na rysunku poni-
żej) w każdej chwili spoczywa (
v
= 0). Natomiast prędkość liniowa każdego innego
punktu jest w każdej chwili prostopadła do linii łączącej ten punkt z podstawą P i pro-
porcjonalna do odległości tego punktu od P. Oznacza to, że walec
obraca się wokół
punktu P
. Oznacza to, że możemy toczenie opisywać również jako "czysty" ruch obro-
towy ale względem osi przechodzącej przez punkt P styczności z powierzchnią, po któ-
rej toczy się ciało.
Przykład 3
Krążek i kula o masach m i promieniach R staczają się po równi pochyłej o wysokości h
Obliczyć ich prędkości u dołu równi.
Z zasady zachowania energii
mgh = (1/2)m
v
2
+ (1/2)I
ω
2
Ponieważ
ω =
v
/R więc
mgh = (1/2)m
v
2
+ (1/2)I(
v
/R)
2
Przekształcając
12-8
Z. Kąkol-Notatki do Wykładu z Fizyki
2
2
2
R
I
m
mgh
+
=
v
Dla krążka I = mR
2
/2 więc
gh
3
4
=
v
podczas gdy dla kuli I = 2mR
2
/5 więc
gh
7
10
=
v
Zauważmy, że odpowiedź nie zależy od masy i promienia ale
zależy tylko od kształtu
.
Gdyby te ciała zsuwały się (bez tarcia) to
gh
2
=
v
dla obu brył.
Ten sam przykład możemy rozwiązać traktując toczenie wyłącznie jako ruch obrotowy
ale wtedy musimy skorzystać z twierdzenia Steinera, żeby obliczyć moment bezwład-
ności względem osi przechodzącej przez punkt styczności z powierzchnią.
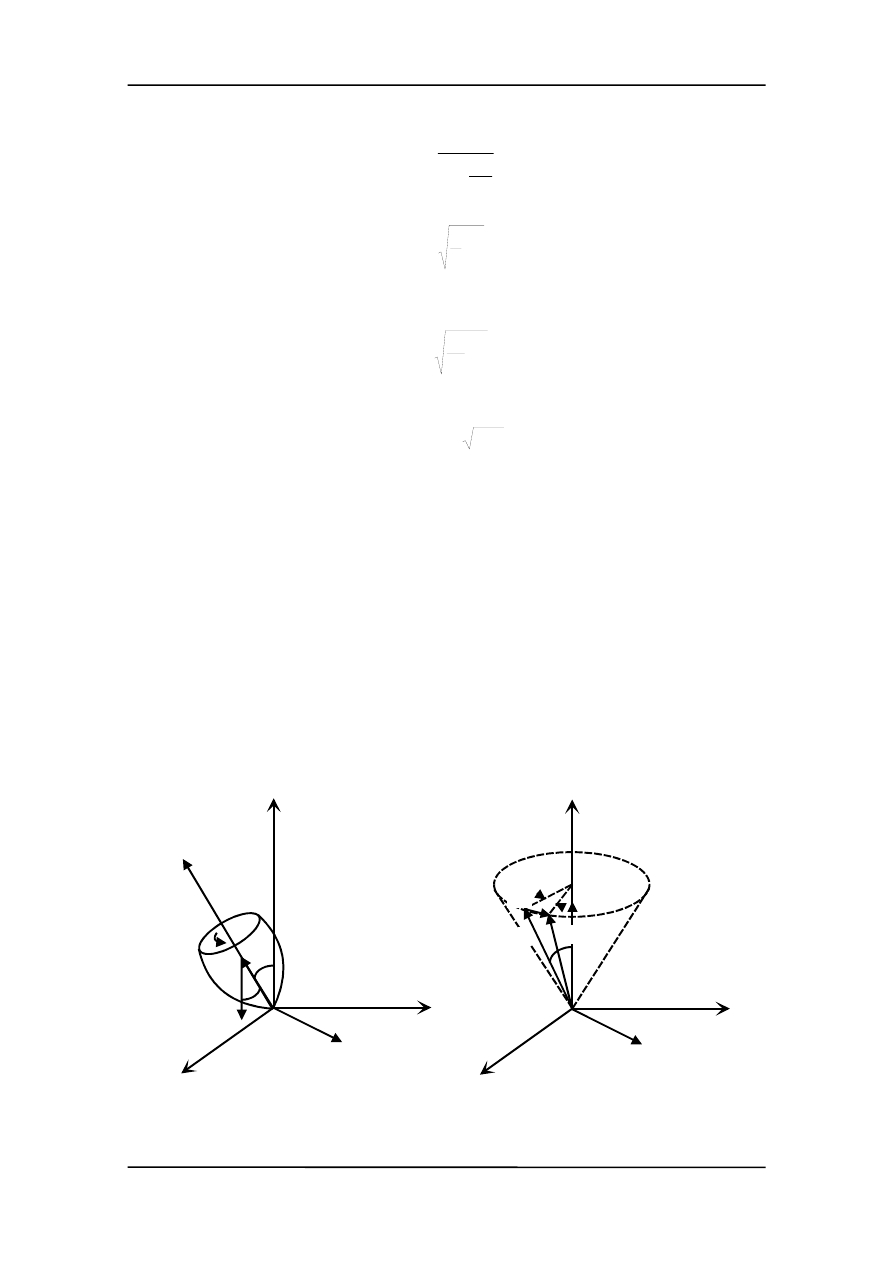
12.6 Ruch precesyjny (bąk)
Inny przykładem ruchu obrotowego, w którym oś obrotu nie jest nieruchomą w in-
ercjalnym układzie odniesienia jest bąk wirujący dookoła pewnej osi symetrii. Punkt
podparcia bąka znajduje się w początku inercjalnego układu odniesienia. Z doświad-
czenia wiemy, że oś wirującego bąka porusza się dookoła osi pionowej, zakreślając po-
wierzchnię stożka. Taki ruch nazywamy
precesją
.
W sytuacji przedstawionej na rysunku poniżej bąk ma prędkość kątową
ω
dookoła
swej osi
. Ma również moment pędu L względem tej osi, która tworzy kąt
θ z osią pio-
nową.
L
mg
r
θ
θ
τ
x
y
z
y
z
x
τ
L+
∆
L
L
∆
L
∆ϕ
ω
p
θ
12-9
Z. Kąkol-Notatki do Wykładu z Fizyki
Na bąk działają dwie siły: siła w punkcie podparcia działa w górę i siła ciężkości przy-
łożona do środka masy działa w dół. Siła reakcji działająca w górę ma zerowy moment
bo ma zerowe ramię (względem punktu podparcia). Ciężar mg wytwarza jednak mo-
ment siły względem punktu podparcia:
τ = r×F = r×mg
gdzie r określa położenie środka masy. Z iloczynu wektorowego wynika, że
τ jest pro-
stopadłe do r i do mg.
Zauważmy, że
τ, L i r wirują dokoła osi pionowej z częstością precesji ω
p
.
Obliczymy teraz kątową precesję
ω
p
.
t
p
∆
∆
=
ϕ
ω
Ponieważ
∆L << L, to mamy
∆
ϕ ≅ ∆L/Lsinθ
Z równania (12.5) wynika, że
∆L =
τ∆t
więc
∆
ϕ ≅ τ∆t/Lsinθ
Otrzymujemy więc
ω
p
=
∆
ϕ/∆t = τ/Lsinθ
(12.14)
Moment siły jest równy
τ = rmg sin(180°-θ) = rmg sinθ
więc ostatecznie
ω
p
= rmg/L
(12.15)
Zwróćmy uwagę, że
prędkość precesji nie zależy od kąta
θ
i jest odwrotnie proporcjo-
nalna do wartości momentu pędu.
Równanie (12.14) można zapisać w postaci wektorowej. Najpierw przepisujemy je do
postaci
τ = ω
p
L sin
θ
Widać, że po prawej stronie równania otrzymaliśmy wartość iloczynu wektorowego
ω
p
×L. Tak więc ostatecznie wyrażenie wiążące prędkość kątową precesji z momentem
siły i momentem pędu ma postać
12-10

Z. Kąkol-Notatki do Wykładu z Fizyki
L
ω
τ
×
=
p
(12.16)
Zjawisko precesji momentu magnetycznego (spinu) jest podstawą różnych technik do-
świadczalnych (NMR, EPR), które znalazły szerokie zastosowanie w badaniach, techni-
ce i medycynie.
12-11
Wyszukiwarka
Podobne podstrony:
Fizyka Kakol wyklad 17 id 176833
Fizyka Kakol wyklad 13 id 176831
Fizyka Kakol wyklad 14 id 176832
Fizyka Kakol wyklad 30 id 176839
Fizyka Kakol wyklad 24 id 176836
Fizyka Kakol wyklad 37 id 176843
Fizyka Kakol wyklad 22 id 176835
Fizyka Kąkol wykład 25
więcej podobnych podstron