
Laboratorium Podstaw Automatyki
Badanie charakterystyk statycznych
instrukcja do ćwiczeń laboratoryjnych
Copyright © ASIT 2007 (www.asit.pl)
Cel i zakres ćwiczenia
Celem ćwiczenia jest zbadanie charakterystyk statycznych i histerez sztucznego mięśnia
pneumatycznego dla różnych obciążeń. Dla badanego obiektu należy także obliczyć błąd
podstawowy oraz błąd histerezy a także określić klasę dokładności przyrządu.
Wprowadzenie teoretyczne
Charakterystyka statyczną nazywana jest zależność sygnału wyjściowego układu od
sygnału wejściowego w warunkach ustalonych (nie występują zmiany sygnału wyjściowego).
Charakterystyka statyczna opisuje więc statyczne (niezależne od czasu) zachowanie układu
(obiektu).
Charakterystykę statyczna zwykle można opisać wielomianem
y=a
0
a
1
x a
2
x
2
... a
n
x
n
w praktyce natomiast rozpatruje się najczęściej obiekty liniowe, których charakterystyki statyczne
opisywane są równaniami
y=a x lub
y=a
0
a
1
x .
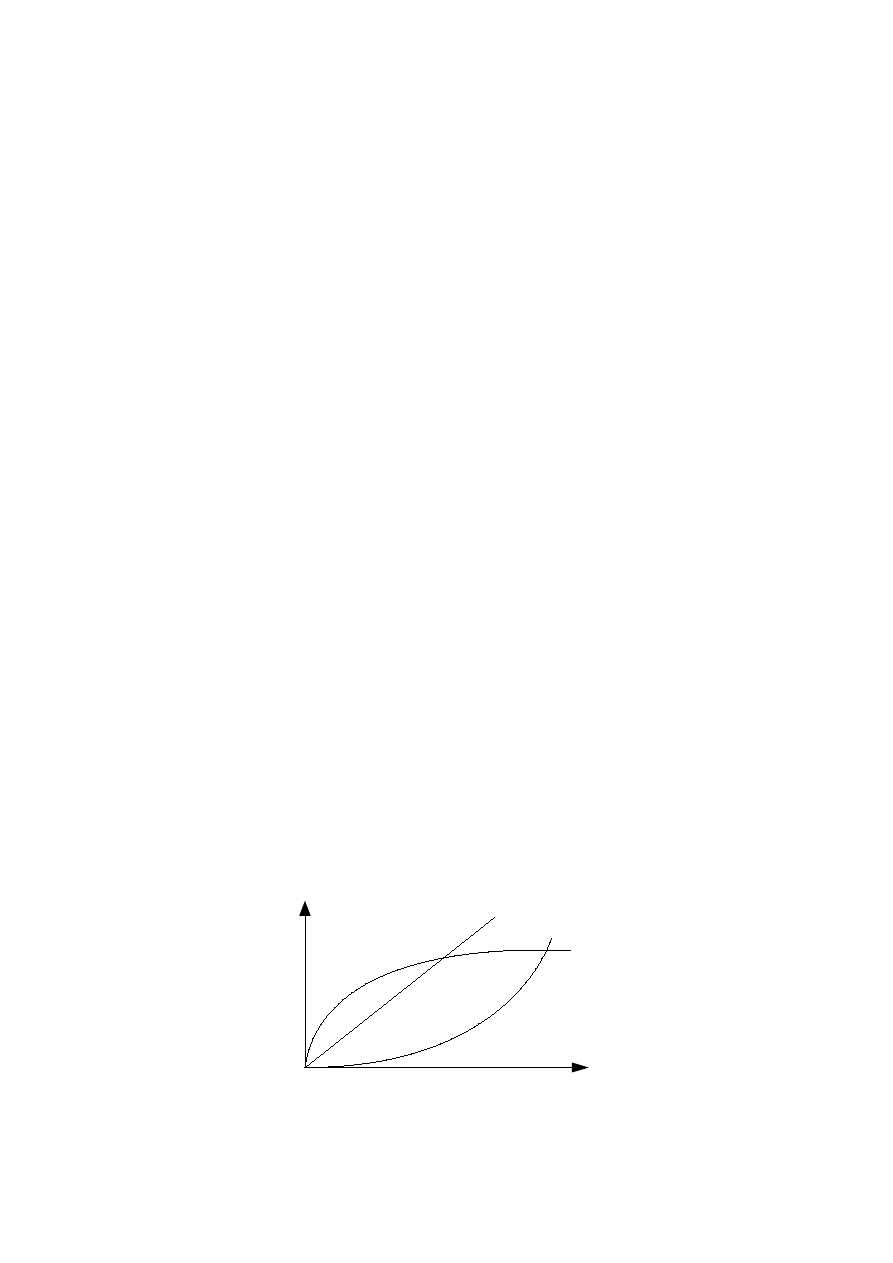
Jak wynika z powyższych równań charakterystyki mogą być liniami prostymi (dla członów
lub układów liniowych) lub krzywymi (dla członów lub układów nieliniowych). Układy liniowe są
znacznie prostsze do analizy więc często zakłada się liniowość układów mimo ich faktycznej
niewielkiej nieliniowości lub linearyzuje się układ w punkcie pracy stosując odpowiednie
procedury obliczeniowe.
Przykładowe charakterystyki statyczne pokazane zostały na rys. 1.
Rys. 1. Przykładowe charakterystyki statyczne
2
x
y
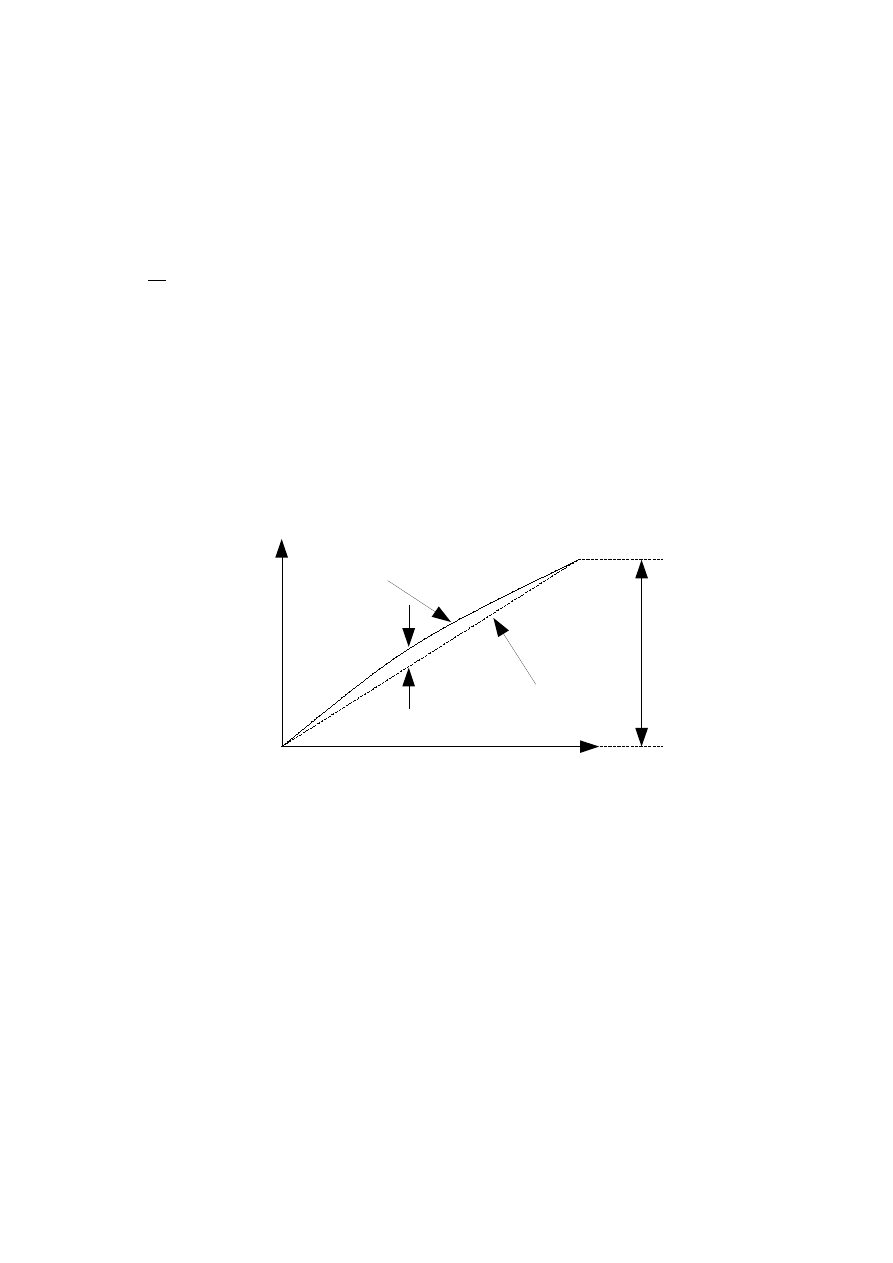
Wyznaczania błędu podstawowego
Jednym z istotnych parametrów układów automatyki jest błąd podstawowy. Określa on
procentowo stosunek maksymalnej różnicy rzeczywistej charakterystyki statycznej układu od
charakterystyki idealnej do szerokości przedziału sygnału wyjściowego.
Błąd podstawowy wyznacza się z zależności
y
p
=
dy
y
∗
100 [%]
gdzie
y
p
– błąd podstawowy,
dy – największa różnica pomiędzy charakterystyką rzeczywistą a idealną,
y – zakres sygnału wyjściowego.
Rys. 2. Schemat wyznaczania błędu podstawowego
Wyznaczania błędu niejednoznaczności (histerezy)
Zjawisko histerezy występuje powszechnie w przyrodzie i polega na różnicy w przebiegach
rzeczywistych charakterystyk w zależności od kierunku zmian sygnału wejściowego. Dla
narastających wartości sygnału wejściowego otrzymujemy inną krzywą sygnału wejściowego niż
dla malejących zmian sygnału wejściowego (rys. 3). Parametrem określającym maksymalne
różnice w przebiegach tych krzywych nazywamy błędem niejednoznaczności (lub błędem
histerezy).
3
x
y
Charakterystyka
rzeczywista
Charakterystyka
idealna
Δy
dy
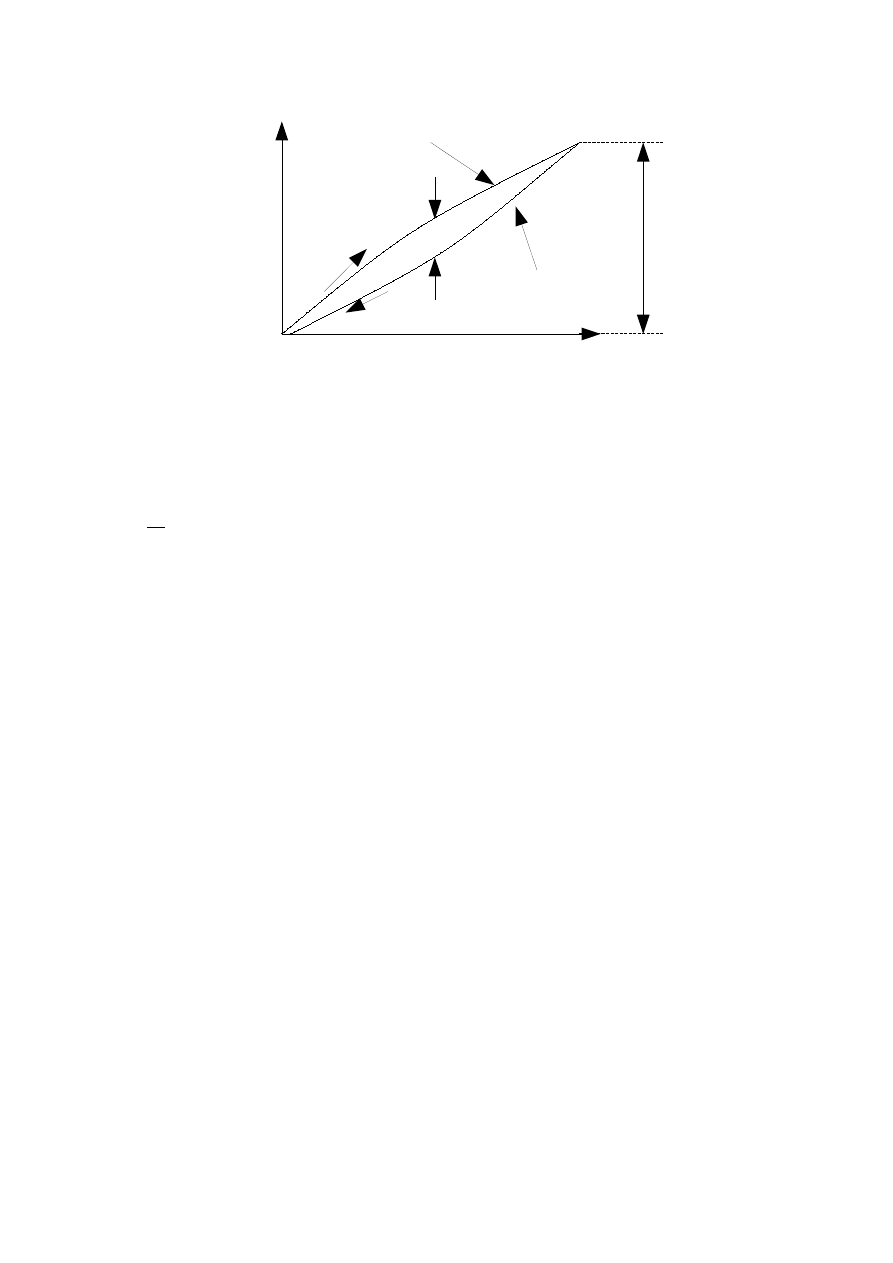
Rys. 3. Schemat wyznaczania błędu niejednoznaczności (histerezy)
Analogicznie do błędu podstawowego, błąd niejednoznaczności określa stosunek
maksymalnej różnicy pomiędzy krzywymi dla narastającego i malejącego sygnału wejściowego do
szerokości przedziału sygnału wyjściowego:
y
h
=
dy
y
∗
100 [%]
gdzie
y
p
– błąd niejednoznaczności,
dy
– największa różnica pomiędzy krzywymi dla narastającego i malejącego sygnału
wejściowego,
y
– zakres sygnału wyjściowego.
Określenie klasy dokładności
Klasa dokładności określa znormalizowany przedział błędu podstawowego w jakim mieści
się badany obiekt.
Klasę dokładności określa się jako najmniejszą wartość z szeregu (poniżej) w której zawiera
się błąd podstawowy wyrażony w procentach.
Szereg klas dokładności: 0,01; 0,02; 0,05; 0,1; 0,2; 0,5; 1,0; 1,5; 2,0; 2,5; 5,0.
Opis stanowiska
Muskuły pneumatyczne stosowane są jako elementy napędowe w robotach, manipulatorach,
protezach kończyn oraz w urządzeniach, w których wymagana jest duża dynamika przy niewielkim
skoku. Charakteryzują się niewielką wagą oraz niska ceną.
4
x
y
Krzywa dla
narastającego x
Δy
dy
Krzywa dla
malejącego x
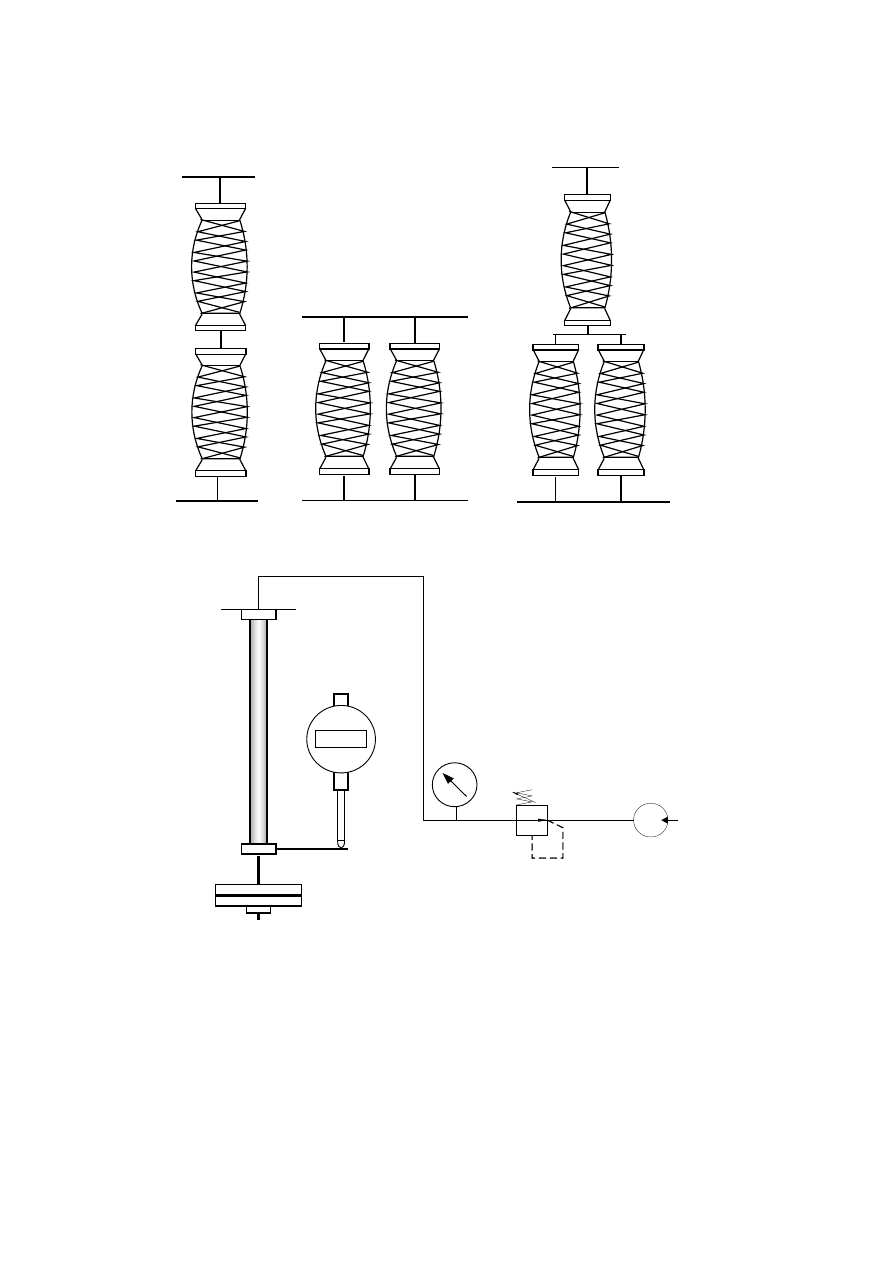
Muskuły mogą być łączone równolegle, szeregowo oraz w kombinacjach szeregowo–równoległych
(rys. 4) uzyskując w ten sposób zwiększenie skoku, maksymalnej siły lub obu tych parametrów.
Rys. 4. Połączenia muskułów
Rys. 5. Schemat stanowiska
Na opisywanym stanowisku (rys. 5) zamontowany został muskuł firmy FESTO o symbolu
MAS-10. Ciśnienie zasilania mięśnia ustawiane jest manometrem precyzyjnym. Mięsień pod
wpływem ciśnienie skraca swoją długość (rozpręża się) co powoduje podniesienie podczepionej do
niego masy (obciążenia). Wielkość skurczu mięśnia mierzona jest elektronicznym czujnikiem
przemieszczenia.
5
1 – Sprężarka
2 – Reduktor precyzyjny
3 – Manometr
4 – Mięsień pneumatyczny
5 – Czujnik przesunięcia
6 – Obciążenie
3
2
1
0 – 2,5 bar
4
5
6

Stanowisko zapewnia możliwość podczepienia różnych mas obciążenia (5kg, 10kg).
Przebieg ćwiczenia
Ćwiczenie polega na zbadaniu charakterystyk statycznych muskułu pneumatycznego. Jako
wielkość wyjściową przyjęte zostało skrócenie mięśnia a jako wielkość wejściową ciśnienie
zasilania mięśnia. Doświadczenia wykonujemy dla różnych obciążeń mięśnia (0kg, 5kg i 10 kg).
Dla podanych obciążeń należy sporządzić także wykresy histerezy w pełnym zakresie ciśnienia
wejściowego (0 – 0,25 MPa).
Dla uproszczenie przyjmujemy, że obiekt (muskuł) jest liniowy a jego charakterystyka idealna
przebiega przez pierwszy i ostatni punkt pomiarowy. Równanie charakterystyki idealnej możemy
opisać następująco:
y− y
1
=
y
2
−
y
1
x
2
– x
1
x−x
1
dla punktów X
1
x
1
; y
1
i x
2
x
2
; y
2
Charakterystyka statyczna
1. Ustaw zerową wartość ciśnienia reduktorem precyzyjnym.
2. Sprawdź ustawienie zera na czujniku zegarowym.
3. Sprawdź czy trzpień czujnika przemieszczenia styka się z płetwą mięśnia.
4. Zwiększaj ciśnienie co 0,01 MPa pokręcając ostrożnie pokrętłem reduktora precyzyjnego.
UWAGA: Niedopuszczalne jest przekroczenie ustawianej wielkości i powrót do niej. PO
przekroczeniu ustawianej wielkości (punktu pomiarowego) należy powtórzyć doświadczenie.
5. Odczytaj wielkość skrócenia mięśnia z czujnika przemieszczenia po ustaleniu się układu
(brak zmian pomiaru przemieszczenia).
Wykonaj powyższe badanie dla obciążeń 0kg, 5kg i 10 kg.
Histereza
Pętlę histerezy sporządzamy podobnie jak charakterystykę statyczną z tym, że dla każdego
obciążenia badamy przebiegi dla rosnącego i malejącego ciśnienia aby uzyskać przebieg jak na
rys. 3. Zwiększamy ciśnienie od 0 do 0,25 Pa co 0,01 MPa odczytując skrócenie mięśnia o każdej
zmianie ciśnienia a następnie obniżamy ciśnienie od 0,25 do 0 co 0,01 MPa również odczytując
zmianę długości (powrót) mięśnia. Pętle histerezy sporządzamy również dla 3 obciążeń: 0kg, 5kg,
10kg.
6

Pytania kontrolne
1. Co to jest charakterystyka statyczna?
2. Co to jest pętla histerezy?
3. Jakie elementy automatyki nazywamy liniowymi a akie nieliniowymi?
4. Wyjaśnij pojęcie błędu podstawowego.
5. Wyjaśnij pojęcie błędu histerezy.
6. Wymień inne charakterystyki układów.
Sprawozdanie
Sprawozdanie powinno zawierać:
•
wykresy charakterystyk statycznych z naniesionymi charakterystykami idealnymi dla
wszystkich badanych obciążeń,
•
wykresy pętli histerezy dla wszystkich obciążeń,
•
rachunki błędu podstawowego i niejednoznaczności,
•
określenie klasy dokładności na podstawie błędu podstawowego,
•
wnioski.
Literatura
1. Kaczorek T: Teoria układów regulacji automatycznej. Warszawa 1974
2. Urbaniak A.: Podstawy automatyki. Poznań 2004.
3. Szopliński, Z.: Badanie i projektowanie układów regulacji : metody eksperymentalne i
7
Document Outline
- Cel i zakres ćwiczenia
- Wprowadzenie teoretyczne
- Opis stanowiska
- Przebieg ćwiczenia
- Pytania kontrolne
- Sprawozdanie
- Literatura
Wyszukiwarka
Podobne podstrony:
Badanie charakterystyk statycznych tanzystora v2, POLITECHNIKA LUBELSKA w LUBLINIE
Badanie charakterystyk statycznych przetworników cyfrowych, Metrologia - laboratorium
2 Badanie charakterystyk statycznych przetworników pomiarowych
Badanie charakterystyk statycznych tranzystora v4
tab, Uczelnia, sem I, fiza, LABORATORIUM, od konia, laborki moje, badania charakterystyk statycznych
tabela pomiarów, Uczelnia, sem I, fiza, LABORATORIUM, od konia, laborki moje, badania charakterystyk
cw1 Badanie charakterystyk statycznych diod mocy i tyrystorow
poprawka Charakterystyka tranzystora, Uczelnia, sem I, fiza, LABORATORIUM, od konia, laborki moje, b
Ćw. 1 - Badanie charakterystyk statycznych tranzystora, POLITECHNIKA LUBELSKA
Badanie charakterystyk statycznych tranzystora - Pelc, Elektronika
Badanie charakterystyk statycznych tranzystora v4, Politechnika Lubelska
2 Badanie charakterystyk statycznych przetworników pomiarowychid!101
Badanie charakterystyk statycznych tranzystora, SPRAWOZDANIA czyjeś
BADANIE CHARAKTERYSTYK STATYCZNYCH, Elektronika
więcej podobnych podstron