
Przyk
ładowe układy automatyki
Przeka
źnikowe układy sterowania logicznego
W uk
ładach sterowania logicznego (binarnego) zmienne wejściowe
i wyj
ściowe są zmiennymi binarnymi.
Na rysunku 19 przedstawiono schemat uk
ładu włączającego
grza
łkę elektryczną, gdy temperatura jest zbyt niska. Pod względem
funkcjonalnym jest on równowa
żny z układem z rys. 15.1 i różni się
jedynie rodzajem zastosowanego czujnika i u
życiem przekaźnika
elektromagnetycznego. Czujnikiem jest termometr rt
ęciowy ze stykiem
umo
żliwiającym przepływ prądu przy dostatecznie wysokiej
temperaturze. Przeka
źnik wzbudzony tym prądem rozłącza obwód
grza
łki.
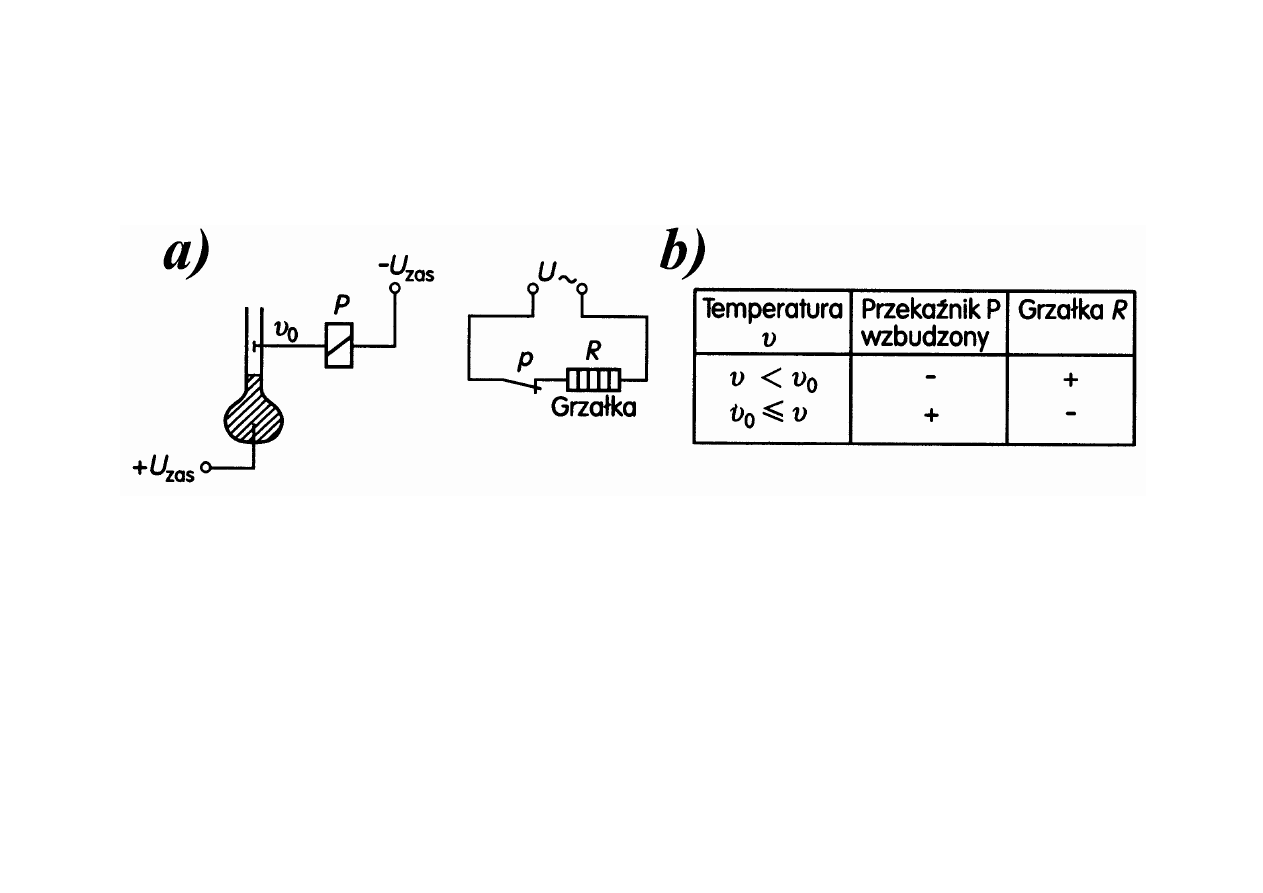
Rys. 19. Przeka
źnikowy układ sterowania ogrzewaniem:
a
) schemat;
b
) tablica zale
żności

Na podobnej zasadzie dzia
ła układ przedstawiony na rys. 20, sterujący
w
łączaniem dwóch grzałek o mocy 1 kW i 2 kW; im niższa jest
temperatura, tym wi
ększa jest moc włączonych grzałek. Zarówno w
tym uk
ładzie, jak i w układzie z rys. 19 każdej wartości temperatury
odpowiadaj
ą
konkretne
(jednoznaczne)
warto
ści
sygna
łów
steruj
ących.
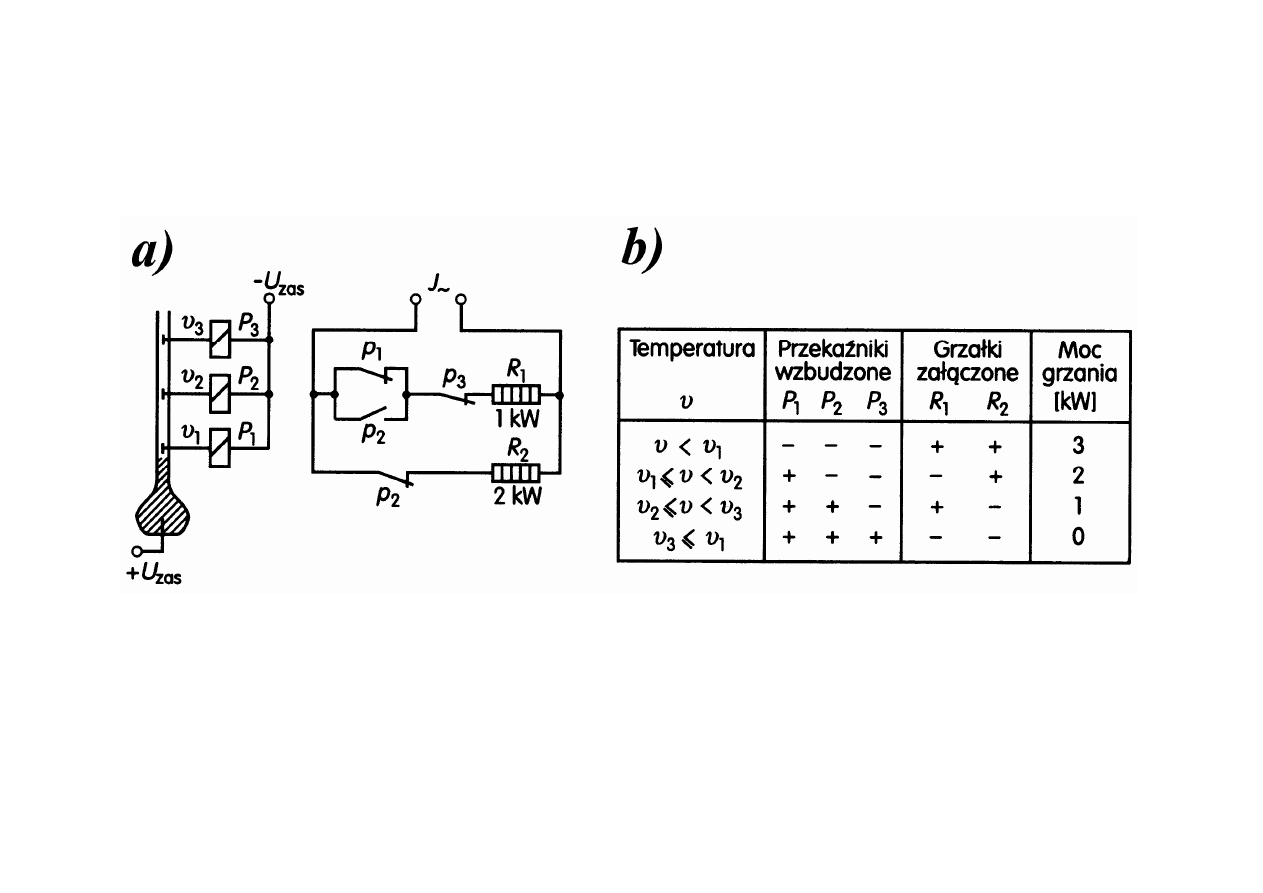
Rys. 20. Przeka
źnikowy układ sterowania ogrzewaniem:
a
) schemat;
b
) tablica zale
żności

Uk
ład przedstawiony na rys. 21 steruje włączaniem i wyłączaniem
silnika pompy uzupe
łniającej wodę w zbiorniku. Silnik
M
nap
ędzający
pomp
ę jest załączany po obniżeniu się ciśnienia w zbiorniku poniżej
warto
ści
p
min
, a wy
łączany po zwiększeniu ciśnienia powyżej wartości
p
max
. Dzia
łanie układu w zakresie ciśnień z przedziału (
p
min
,
p
max
)
zale
ży od "zapamiętanej" wartości sygnału sterującego: jeżeli ostatnio
ci
śnienie było zbyt niskie, to silnik jest (pozostaje) załączony, a jeżeli
zbyt wysokie —
to wy
łączony. W rezultacie układ zapewnia
utrzymywanie ci
śnienia wody w granicach od
p
min
do
p
max
.
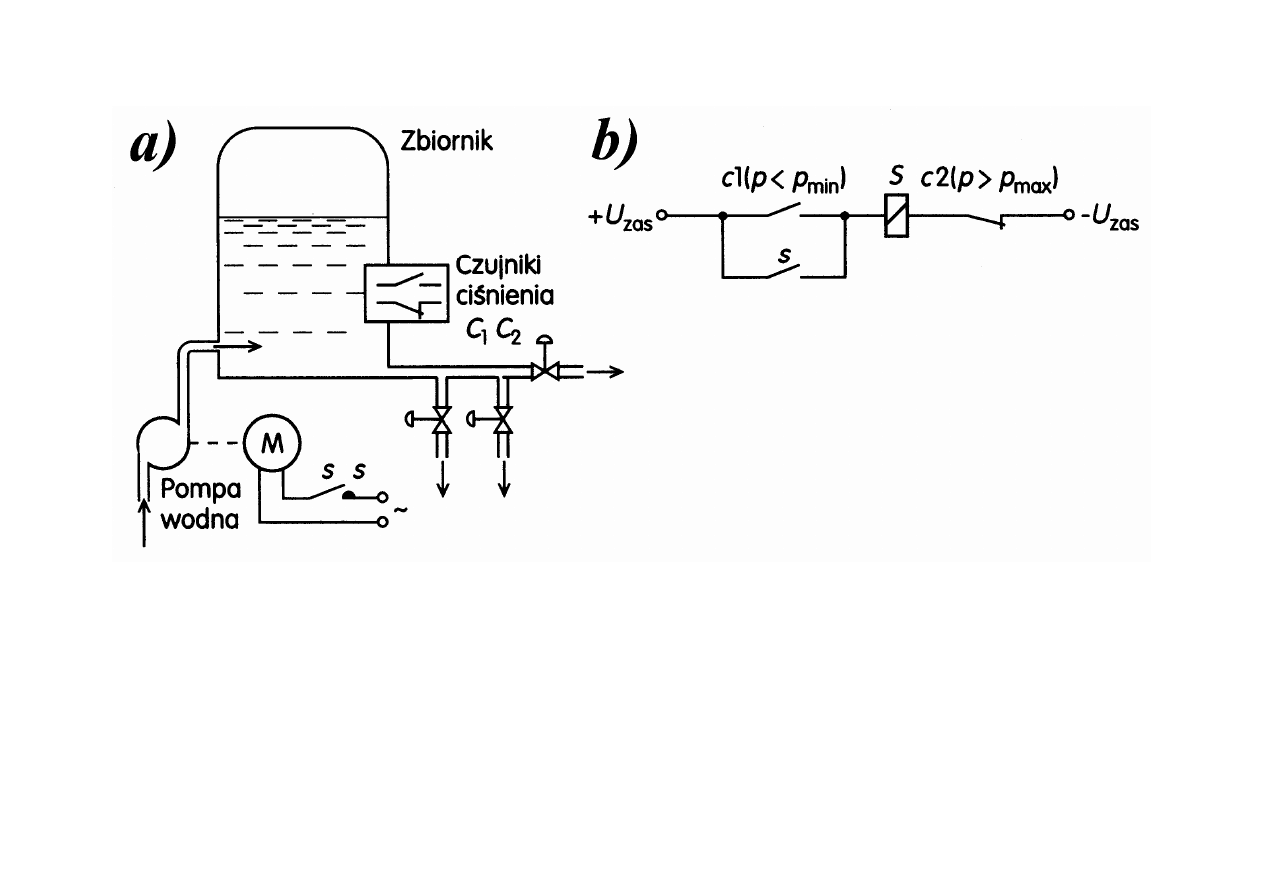
Rys. 21. Przeka
źnikowy układ sterowania pompą uzupełniającą wodę w
zbiorniku:
a
) schemat instalacji;
b
) schemat (uproszczony) uk
ładu sterowania

Uk
łady sterowania zespołów urządzeń. Blokady
W warunkach przemys
łowych maszyny i urządzenia często
wchodz
ą w skład większych zespołów i ich działanie jest w ramach
tych zespo
łów wzajemnie uzależnione. Klasycznym przykładem są
zespo
ły urządzeń transportowych wzajemnie przekazujących sobie
przenoszony materia
ł (rys. 22a). Kolejność załączania i wyłączania
poszczególnych transporterów nie jest dowolna, nie mo
żna bowiem
dopu
ścić do sytuacji, w której podawany przez jeden transporter
materia
ł nie byłby odbierany przez drugi. Układ sterowania umożliwia
za
łączanie i wyłączanie wszystkich lub niektórych transporterów, z tym
że blokuje możliwość załączania (wyłączania) ich w nieodpowiedniej
kolejno
ści. Z tego względu układ taki bywa nazywany układem blokady
(kaskadowej). Nazw
ę tę stosuje się w ogólności do układów sterowania
wspó
łzależnego zespołów urządzeń.
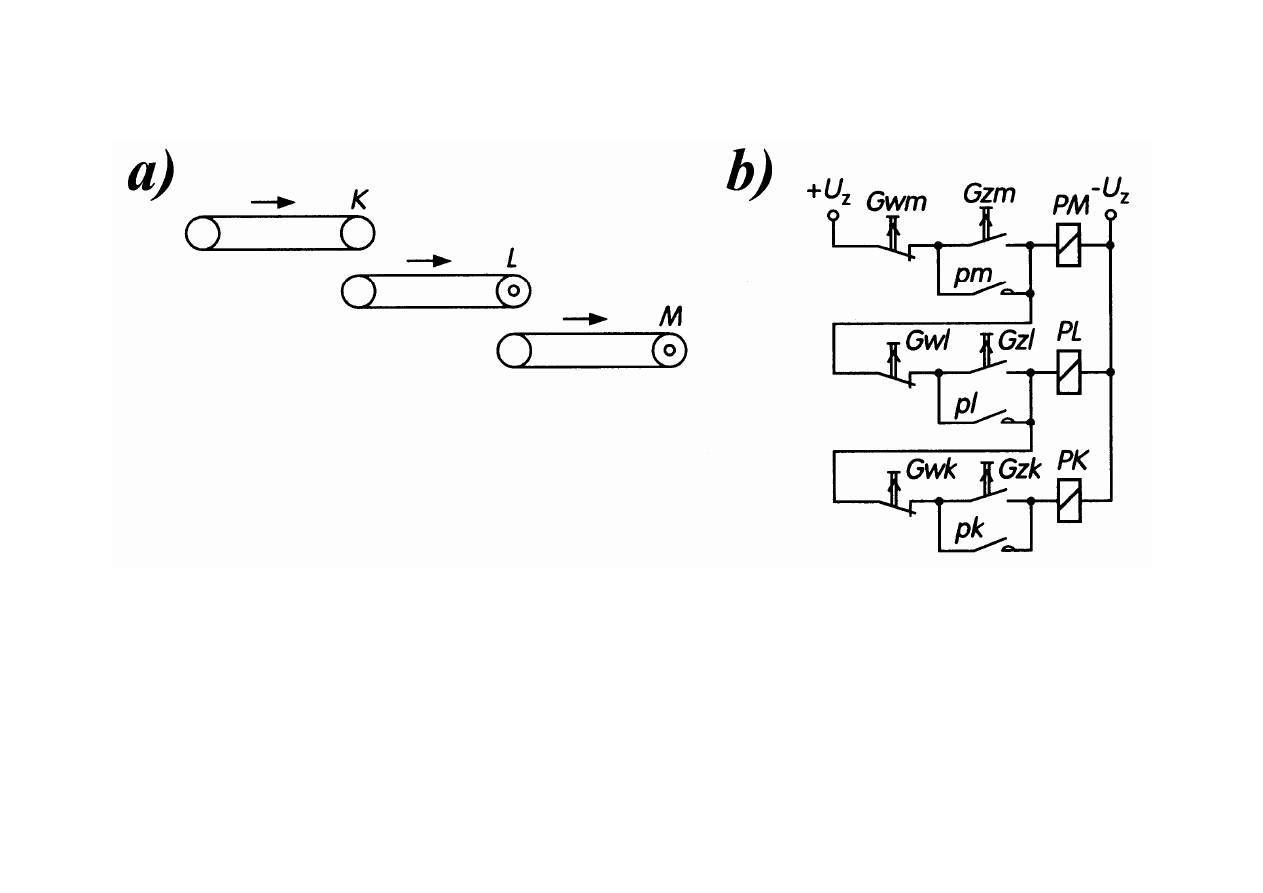
Rys. 22. Przeka
źnikowy układ sterowania trzech transporterów:
a
) ci
ąg transporterów;
b
) schemat uk
ładu sterowania

Uk
ład sterowania przedstawiony na rys. 22
b
umo
żliwia załączanie
transporterów w kolejno
ści odbioru materiałów
(M–L–K),
a
wy
łączanie — w kolejności podawania materiału
(K–L–M).
Gdy
wszystkie transportery s
ą wyłączone, nie można załączyć ani
transportera
L
,
ani
transportera
K
(naciskanie
przycisków
za
łączeniowych
Gzl, Gzk
nie powoduje wzbudzenia styczników
PL
i
PK
), mo
żna natomiast załączyć transporter
M
(naci
śnięcie przycisku
Gzm
spowoduje wzbudzenie stycznika
PM
, podtrzymane tak
że po
zwolnieniu przycisku). Gdy transporter
M
jest za
łączony, można
za
łączyć transporter
L
, nie mo
żna natomiast załączyć transportera
K
,
dopóki nie zostanie za
łączony transporter
L
(i
M
).
Je
żeli wszystkie transportery są załączone, to można wyłączyć sam
transporter
K
(naciskaj
ąc przycisk
Gwk
) albo dwa transportery
K
oraz
L
(naciskaj
ąc przycisk
Gwl
), albo wszystkie trzy transportery
(naciskaj
ąc przycisk
Gwm
), nie mo
żna natomiast wyłączyć np.
samego transportera
M
lub
L
.

Przedstawiony uk
ład sterowania ułatwia reagowanie w sytuacjach
awaryjnych. Przy uszkodzeniu np. transportera
L
wystarczy nacisn
ąć
przycisk
Gwl
, powoduj
ąc wyłączenie transportera
L
i podaj
ącego
materia
ł transportera
K
bez wy
łączania transportera
M
odbieraj
ącego
materia
ł.
Wspó
łzależność
dzia
łania
wyst
ępuje
nie
tylko
mi
ędzy
wspó
łpracującymi urządzeniami, ale także między podzespołami
(uk
ładami) tych samych urządzeń oraz między ich czynnościami. Na
przyk
ład włączenie napędu obrabiarki jest poprzedzone włączeniem
uk
ładu smarowania prowadnic, załączenie urządzenia niewidocznego z
miejsca
sterowania
jest
poprzedzone
nadaniem
sygna
łu
ostrzegawczego i odczekaniem okre
ślonego czasu, podczas jazdy
d
źwigu w dół układ sterowania nie reaguje na polecenie jazdy w górę, a
uk
ład sterowania świateł sygnalizacyjnych na skrzyżowaniu dróg,
nawet w razie uszkodzenia, nie mo
że włączyć zielonego światła
jednocze
śnie dla obu przecinających się kierunków ruchu (włączenie
światła czerwonego może być dopuszczalne) itp.

Uk
łady sygnalizacji
Zadaniem sygnalizacji jest zwrócenie uwagi na niektóre sytuacje za
pomoc
ą sygnałów optycznych i akustycznych, np. sygnalizowanie
nieprawid
łowego przebiegu procesu w celu podjęcia przez obsługę
odpowiednich dzia
łań, poprzedzanie rozruchu urządzeń nadaniem sygnału
ostrzegawczego. Nie s
ą to jedyne zadania sygnalizacji. Do typowych
zada
ń układów sygnalizacyjnych należy: sygnalizowanie zakłóceń i awarii
(tak
że stanów zagrożenia), kontrolowanie zabezpieczeń, ostrzeganie (np.
przed rozruchem maszyn), informowanie o stanie pracy urz
ądzeń
(w
łączone – wyłączone).
Urz
ądzenia sygnalizacyjne spotyka się w życiu codziennym, np.
sygnalizatory po
łożenia i ruchu dźwigu osobowego bądź sygnalizatory
steruj
ące ruchem na skrzyżowaniach dróg. W samochodach jest
sygnalizowane obni
żenie poziomu paliwa, zmniejszenie ciśnienia oleju,
uszkodzenie pr
ądnicy, jazda z włączonym hamulcem ręcznym, obniżenie
poziomu p
łynu hamulcowego i inne.
Uk
łady sygnalizacyjne są nieraz bardzo rozbudowane, np. systemy
sygnalizacji przeciwpo
żarowej zawierają nie tylko czujniki i sygnalizatory,
ale tak
że oddzielne źródła zasilania, centralkę i linie połączeniowe
(dozorowe, sygna
łowe i zasilające). Do budowy takich układów stosuje się
elektroniczne uk
łady cyfrowe.
Wyszukiwarka
Podobne podstrony:
uk ady moje ka
Pr dom 4 uk ady p askie
Badanie uk-. kaskadowych, Automatyka i robotyka air pwr, VI SEMESTR, Notatki.. z ASE, naped elektrry
FM5 uk ady nieinercjalne(1)
w02 Uk ady RLC, Szkoła, penek, Przedmioty, Elektronika, Laborki
FM5 uk+éady nieinercjalne
f5 uk ady nieinercjalne fo OB2EVDVJXXSEKF5E7S7FDLNHTLFEPWEOPXXQ3HA
my Dyskretne uk ady regulacji v.4, Elektrotechnika AGH, Semestr IV letni 2013-2014, Teoria Sterowani
UK ADY 3, Inzynieria Materiałowa, I semestr, Elektrotechnika, elektrotechnika, 2.12 scalone układy c
g przemys u i transportu wyk ady (Automatycznie zapisany)
Pr dom 4 uk ady p askie
Uk éady odniesienia
Uk éady cyfrowe wst Öp
w02 Uk ady RLC
Układy elektroniczne 2003, Uk�?ady Elektroniczne
więcej podobnych podstron