1
11. Klasyfikacja robotów ze względu na obszar zastosowania
Rozwój robotyki podlega bardzo szybkim zmianom, a zastosowanie robotów stale się
powiększa. Z tego względu przedstawiony poniżej podział nie uwzględnia wszystkich
obszarów w których roboty są stosowane. Podział ten należy traktować poglądowo.
11.1. Roboty przemysłowe
Roboty przemysłowe są to roboty stosowane w szeroko pojętych zadaniach
przemysłowych. Początkowo głównie stosowane były do spawania i paletyzacji. Obecnie
stosowane są w wielu innych etapach produkcji.
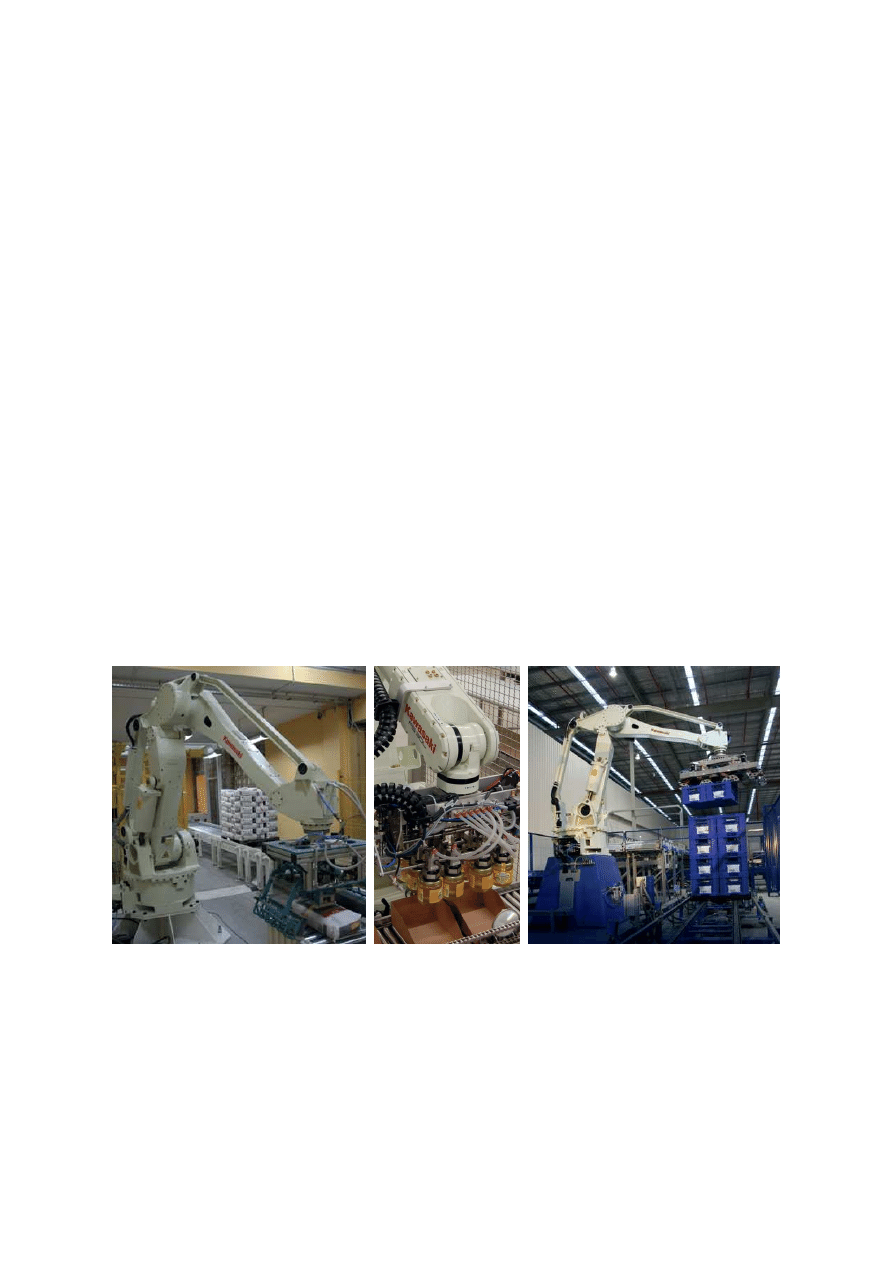
11.1.1. Roboty do przenoszenia materiałów i załadunku palet
Zastosowanie systemów zrobotyzowanych do przenoszenia materiałów i załadunku
palet pozwala oszczędzić ludziom wykonywania monotonnej, nużącej oraz biorąc pod uwagę
ciężar przenoszonych produktów, niebezpiecznej pracy. Na rys. 1 przedstawiono roboty firmy
Kawasaki zastosowane do paletyzacji worków, pakowania słoików do kartonów i paletyzacji
skrzynek.
Rys. 1. Roboty do przenoszenia materiałów i załadunku palet
2
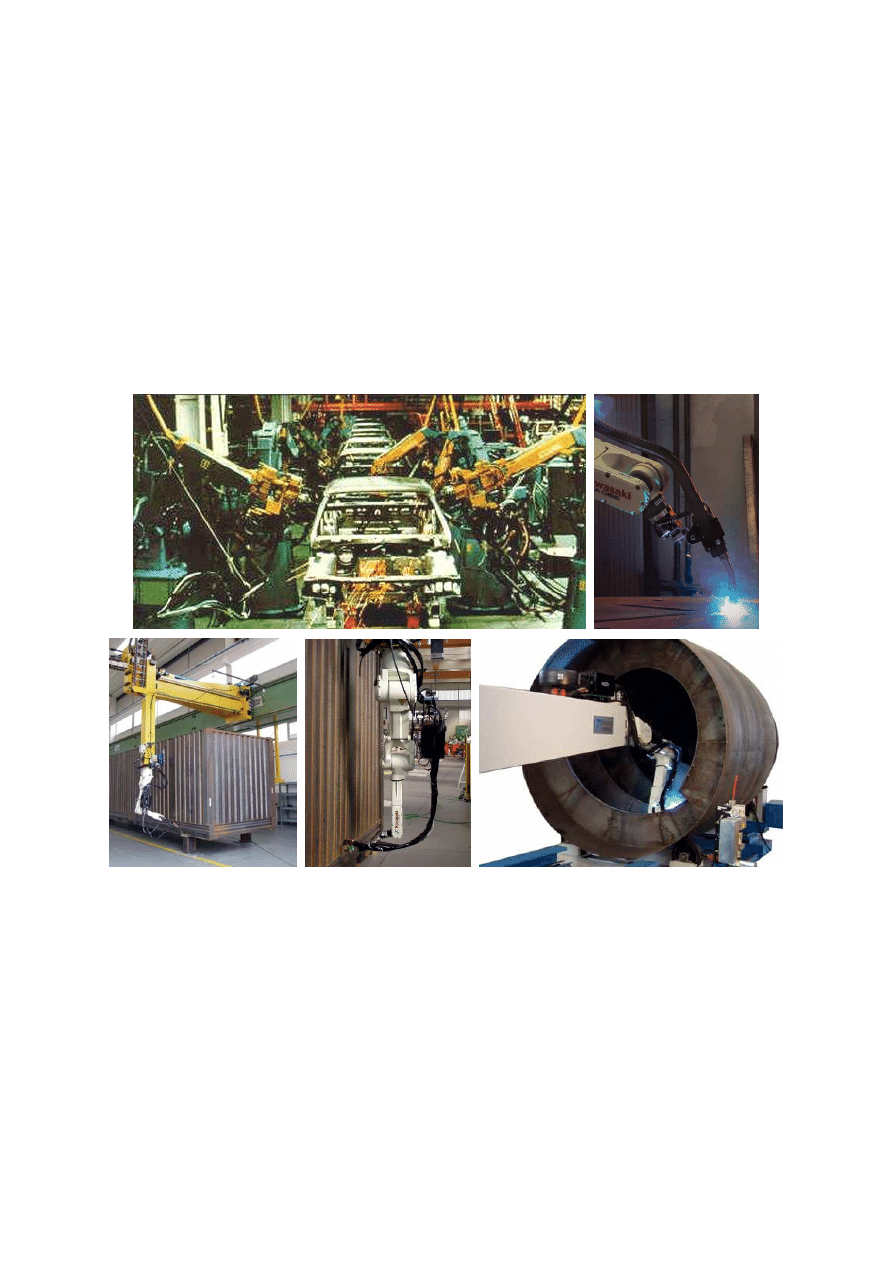
11.1.2. Roboty spawalnicze
Spawanie jest jednym z najpowszechniejszych zastosowań robotów w przemyśle. Ich
wykorzystanie w procesie produkcji pozwala na uzyskanie elementów spełniających wysokie
wymagania jakościowe, jednocześnie gwarantując bardzo dużą wydajność. Do robotów
spawalniczych zalicza się roboty wykorzystywane do: spawania, zgrzewania i lutowania.
Pierwsza fotografia na rys. 2 przedstawia zastosowanie robotów w przemyśle
motoryzacyjnym do zgrzewania karoserii samochodów. Pozostałe przedstawiają roboty
spawalnicze firmy Kawasaki.
Rys. 2. Roboty spawalnicze
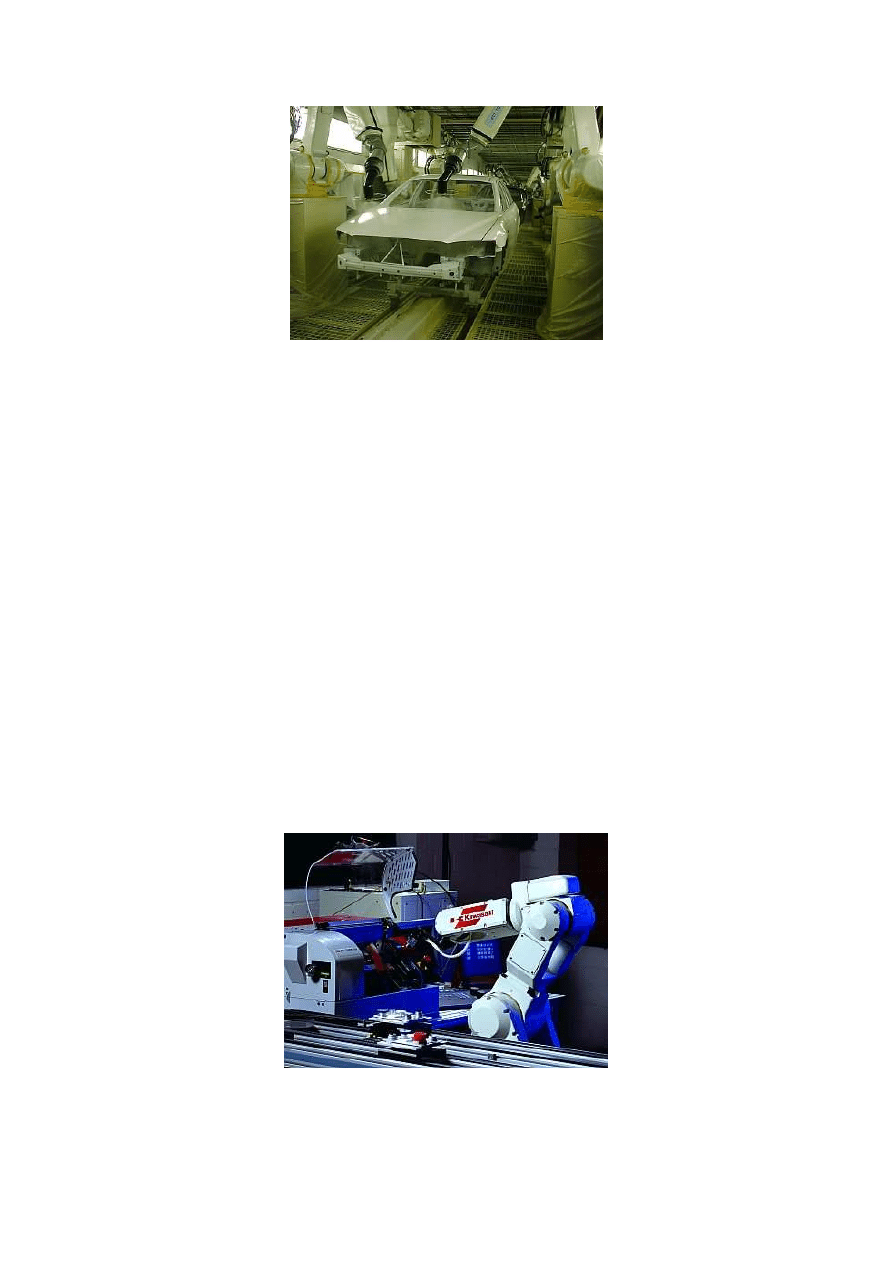
11.1.3. Roboty malarskie
Roboty przemysłowe dedykowane do malowania (rys. 3) stosuje się wszędzie tam,
gdzie wymagana jest wysoka jakość malowanej powierzchni i duża wydajność, a praca
stwarza lub może stwarzać niebezpieczeństwo dla zdrowia człowieka.
3
Rys. 3. Roboty malarskie
11.1.4. Roboty montażowe
W przyszłości największym obszarem zastosowań robotów będą prawdopodobnie
prace montażowe. Prace te ze względu na dokładność i powtarzalność czynności są idealne do
robotyzacji. Obecnie coraz większa liczba produkowanych urządzeń jest montowana
automatycznie lub półautomatycznie.
11.1.5. Roboty do obsługi maszyn
Elementy rozmaitych urządzeń podczas produkcji przechodzą poprzez kolejne
procesy, często są one poddawane obróbce na kilku maszynach (rys. 4). Roboty dzięki swej
elastyczności i dużej prędkości, zapewniają ich transport pomiędzy kolejnymi maszynami w
sposób optymalny.
Rys. 4. Robot Kawasaki obsługujący maszynę numeryczną
4
11.1.6. Roboty stosowane do obróbki materiałów
Obecnie można spotkać roboty wykorzystywane także do obróbki materiałów, może
to być szlifowanie, polerowanie, usuwanie ostrych krawędzi, zadziorów, cięcie strumieniem
wody, cięcie laserem, cięcie łukowe (plazmą), itp..
11.1.7. Roboty laboratoryjne
Prace laboratoryjne wymagają często dużej dokładności. Wiele testów wymaga
przeprowadzania ich w takich samych warunkach. Często jedynym rozwiązaniem w takich
wypadkach jest zastosowanie robotów, szczególnie w laboratoriach w których wykorzystuje
się substancje toksyczne.
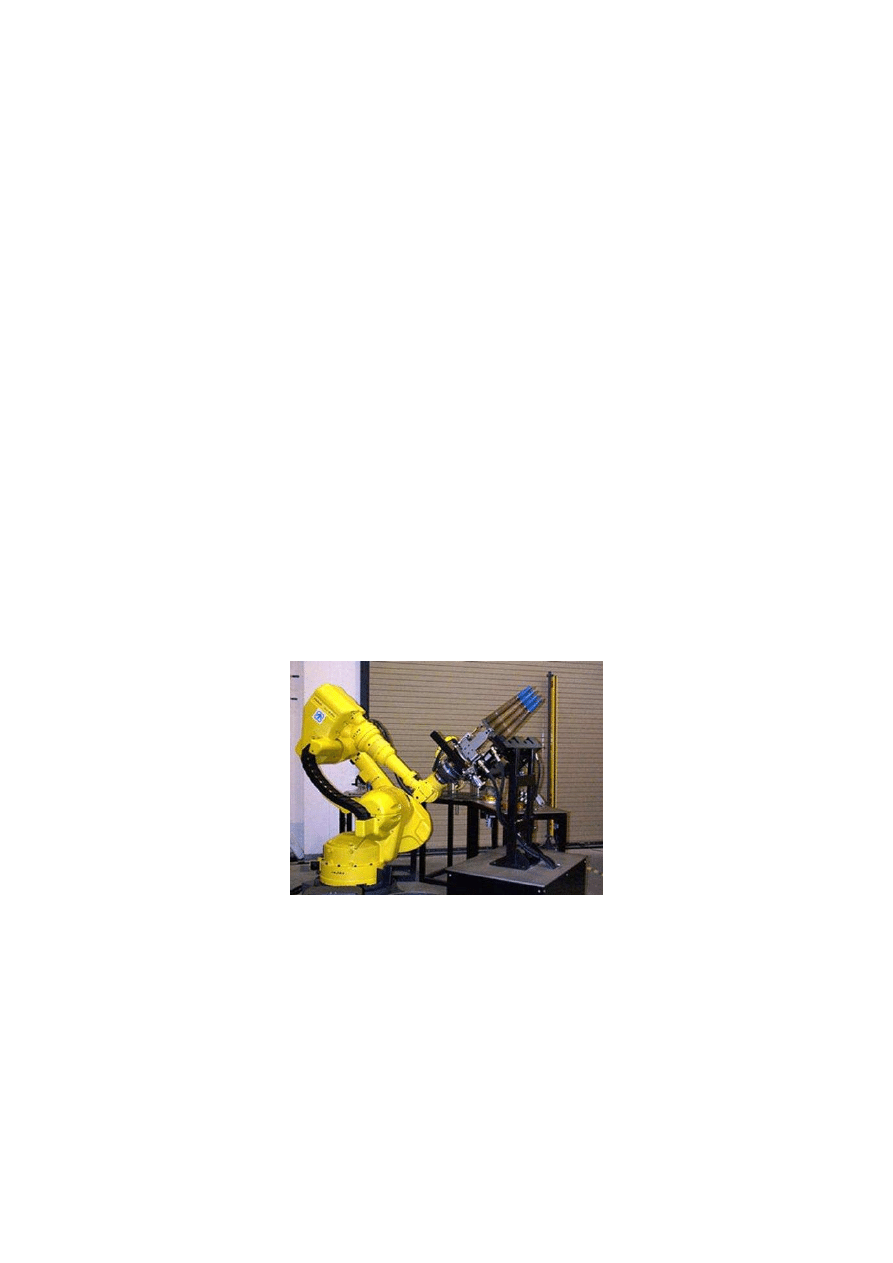
11.1.8. Roboty do utylizacji i zabezpieczania odpadów
Roboty stosowane są także do utylizacji i zabezpieczania odpadów przemysłowych i
militarnych. Przykładem takiego zastosowania może być np. rozbrajanie amunicji (rys. 5).
Roboty mogą być także wykorzystywane do zabezpieczania i utylizacji substancji
radioaktywnych.
Rys. 5. Stanowisko z robotem wykorzystywanym do rozbrajania amunicji
5
11.2. Roboty medyczne i egzoszkielety
Do tej grupy robotów zaliczamy: roboty chirurgiczne, diagnostyczne, rehabilitacyjne,
do transportu próbek i lekarstw w szpitalach, roboty komunikacyjne i z usługą teleobecności
do zastosowań w szpitalach, inteligentne protezy i inne.
Przykłady:
Robin Heart Da Vinci MrBot RP-7i HAL iPill
11.3. Roboty militarne, zwiadowcze i policyjne
W tej grupie robotów znajdują się także: roboty poszukujące i rozbrajające
niebezpieczne materiały (np. wybuchowe, radioaktywne, środki bojowe itd.), obiekty latające
UAV, roboty szpiegowskie, inspekcyjno - zwiadowcze, rekonesansowe, antyterrorystyczne,
interwencyjne, do misji poszukiwawczo - ratunkowych, roboty do ochrony budynków, roboty
patrolujące, roboty czynnego ataku, defensywne, roboty transportujące do zastosowań
militarnych, UGV (Unmanned Ground Vehicle) oraz inne.
Przykłady:
EXPERT PackBot Protector X-45 BEAR Viper
11.4. Roboty badawczo – rozwojowe
Roboty badawczo – rozwojowe, prototypy naukowych jednostek badawczych i
komercyjnych centrów rozwojowych i inne.
6
Przykłady:
ASIMO Aiko Domo Speecys-FC Waseda Talker 5 AquaPenguin
11.5. Roboty eksploracyjne, poszukiwawcze i kosmiczne
Przykłady:
Odyssey IV Fulmar Skarabeusz Nereus Zoe Scarab
11.6. Inne
Wyróżnia się także roboty: usługowe sektora publicznego, gospodarstwa domowego,
do rozrywki, roboty - zabawki, edukacyjne, społeczne, interaktywne, terapeutyczne i inne.
Literatura:
[1] Buratowski T.: Podstawy robotyki, AGH Uczelniane Wydawnictwa Naukowo-
Dydaktyczne, 2006
[2] Kaczmarek W.: Elementy robotyki przemysłowej, Wojskowa Akademia Techniczna,
2008
[3]
http://www.asimo.pl
,
http://www.asimo.pl/materialy/download/robotyka_roboty_podzial.pdf
[4]
http://www.astor.com.pl/robotyka
[5]
http://www.robotyka.com/teoria_spis.php
Informacja o prawach autorskich
O ile nie zaznaczono inaczej, rysunki i teksty pochodzą z pozycji podanych w literaturze.
Niniejsze opracowanie stanowi pomoc do wykładu „Podstawy Robotyki”.
Wyszukiwarka
Podobne podstrony:
Klasyfikacja oprogramowania ze względu na jego funkcje, edukacja i nauka, Informatyka
KLASYFIKACJA BŁĘDÓW ZE WZGLĘDU NA ICH CH ARAKTER a, PWR mbm, Podstawy metrologii
klasyfikowanie liter ze względu na kształt, Ćwiczenia utrwalające litery
Klasyfikacja oprogramowania ze względu na jego funkcje, edukacja i nauka, Informatyka
Podział rodzajów obiektywów ze względu na ich zastosowanie
Kotły, kotły, Kryteria podziału kotłów ze względu na: A) zastosowanie: *kotły główne- ich zadaniem j
klasyfikacje geograficzna i morfologiczna ze względu na stopień zwartości grup członów, Językoznawst
Klasyfikacja hodowli in vitro ze względu na rodzaj hodowanego materiału
Podział węży tłocznych ze względu na średnicę ściąga
Dyskryminacja ze względu na płeć i jej przeciwdziałanie (2004)
Podział trójkątów ze względu na boki i kąty, materiały szkolne, wielokąty
M Domańska, Dyskryminacja ze wzgledu na wiek w orzecznictwie TS eps 2011 04 028
Podział sztucznych satelitów ze względu na
więcej podobnych podstron