Lecture Notes: Introduction to Finite Element Method Chapter 7. Structural Vibration and Dynamics
© 1999 Yijun Liu, University of Cincinnati
157
Chapter 7. Structural Vibration and Dynamics
•
Natural frequencies and modes
•
Frequency response (F(t)=F
o
sin
ωt)
•
Transient response (F(t) arbitrary)
I. Basic Equations
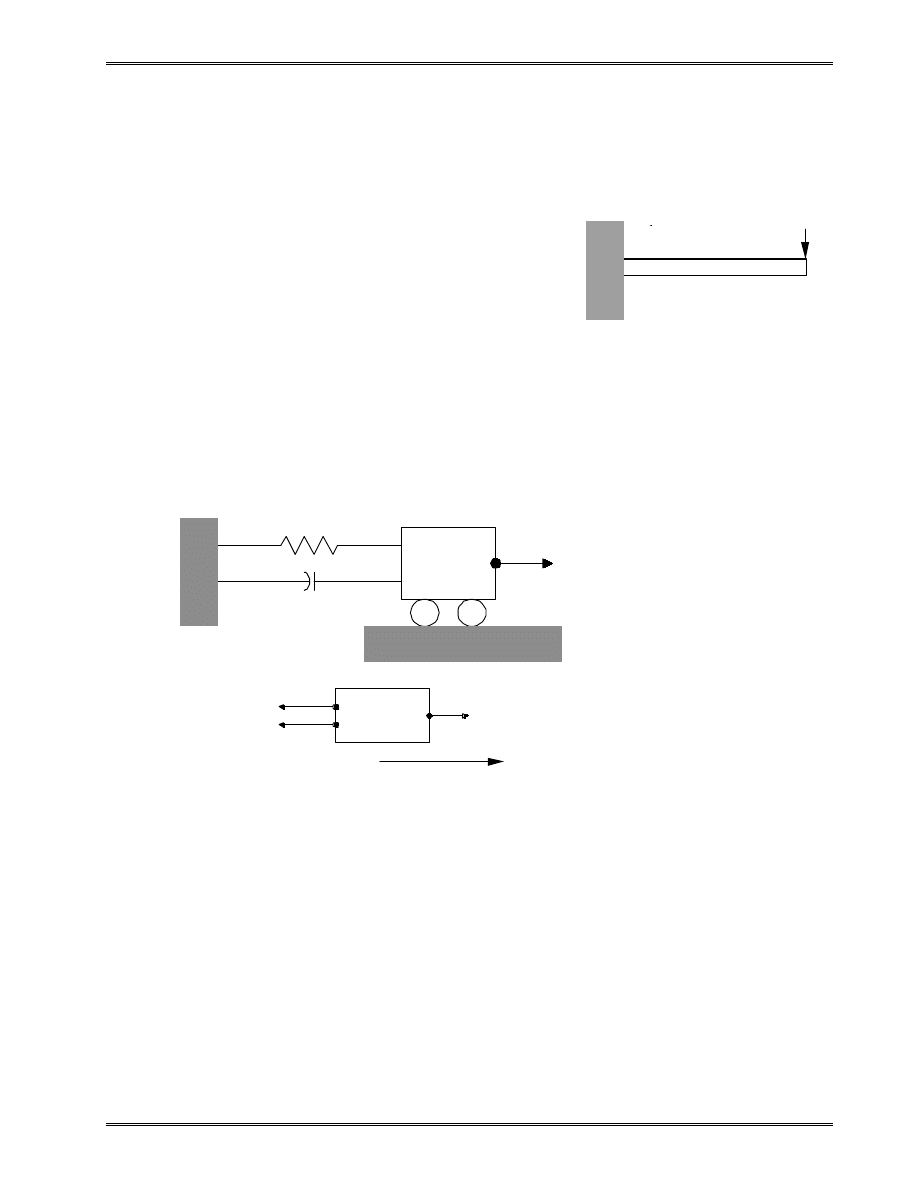
A. Single DOF System
From Newton’s law of motion (ma = F), we have
u
c
u
k
f(t)
u
m
&
&&
−
−
=
,
i.e.
f(t)
u
k
u
c
u
m
=
+
+
&
&&
, (1)
where u is the displacement,
dt
du
u
/
=
&
and
.
/
2
2
dt
u
d
u
=
&
&
F(t)
m
m
f=f(t)
k
c
f(t)
u
c
ku
&
force
-
)
(
damping
-
stiffness
-
mass
-
t
f
c
k
m
x, u
Lecture Notes: Introduction to Finite Element Method Chapter 7. Structural Vibration and Dynamics
© 1999 Yijun Liu, University of Cincinnati
158
Free Vibration:
f(t) = 0 and no damping (c = 0)
Eq. (1) becomes
0
=
+
u
k
u
m &
&
.
(2)
(meaning: inertia force + stiffness force = 0)
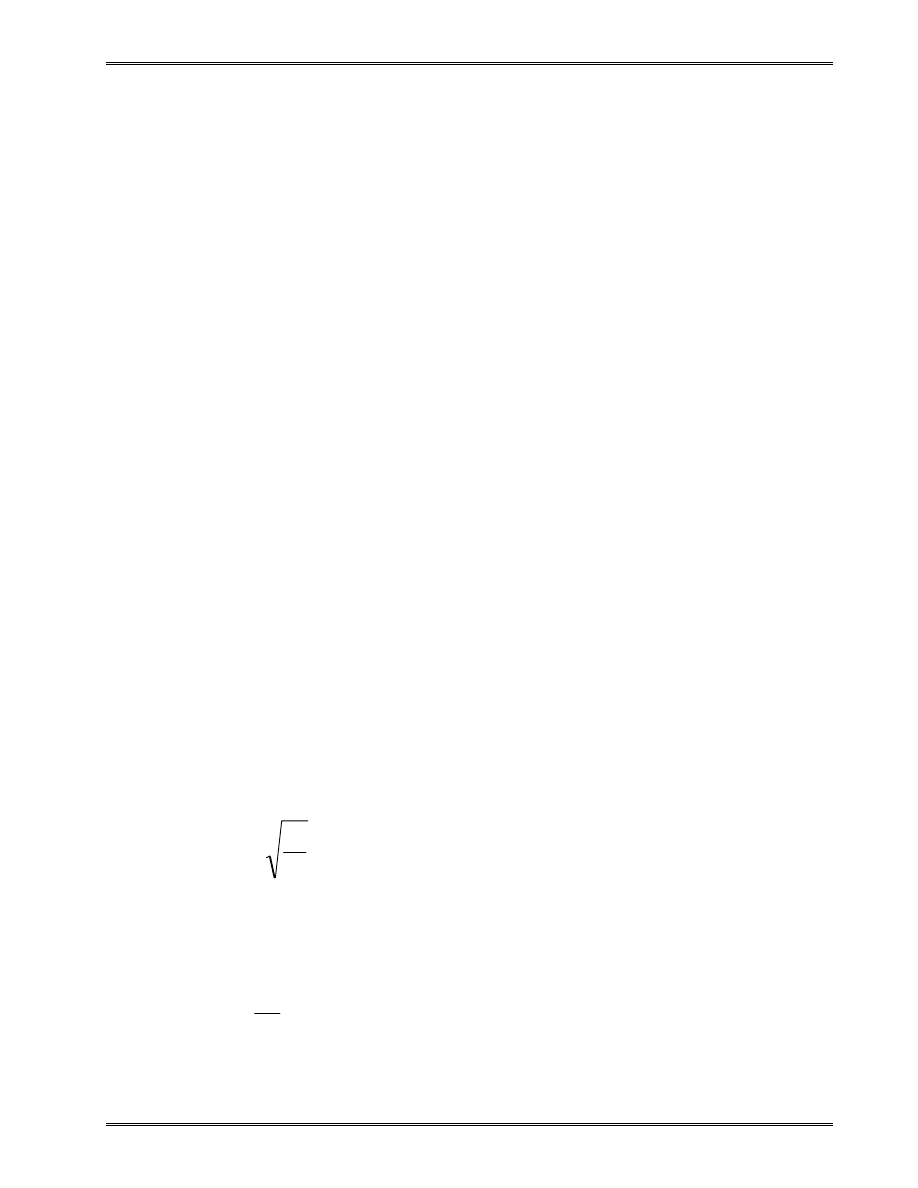
Assume:
t)
(
U
u(t)
ω
sin
=
,
where
ω
is the frequency of oscillation, U the amplitude.
Eq. (2) yields
0
sin
sin
2
=
+
−
t)
ù
(
U
k
t)
ù
(
m
ù
U
i.e.,
[
]
0
2
=
+
−
U
k
m
ω
.
For nontrivial solutions for U, we must have
[
]
0
2
=
+
−
k
m
ω
,
which yields
m
k
=
ω
.
(3)
This is the circular natural frequency of the single DOF
system (rad/s). The cyclic frequency (1/s = Hz) is
π
ω
2
=
f
,
(4)
Lecture Notes: Introduction to Finite Element Method Chapter 7. Structural Vibration and Dynamics
© 1999 Yijun Liu, University of Cincinnati
159
With non-zero damping c, where
m
k
m
c
c
c
2
2
0
=
=
<
<
ω
(c
c
= critical damping) (5)
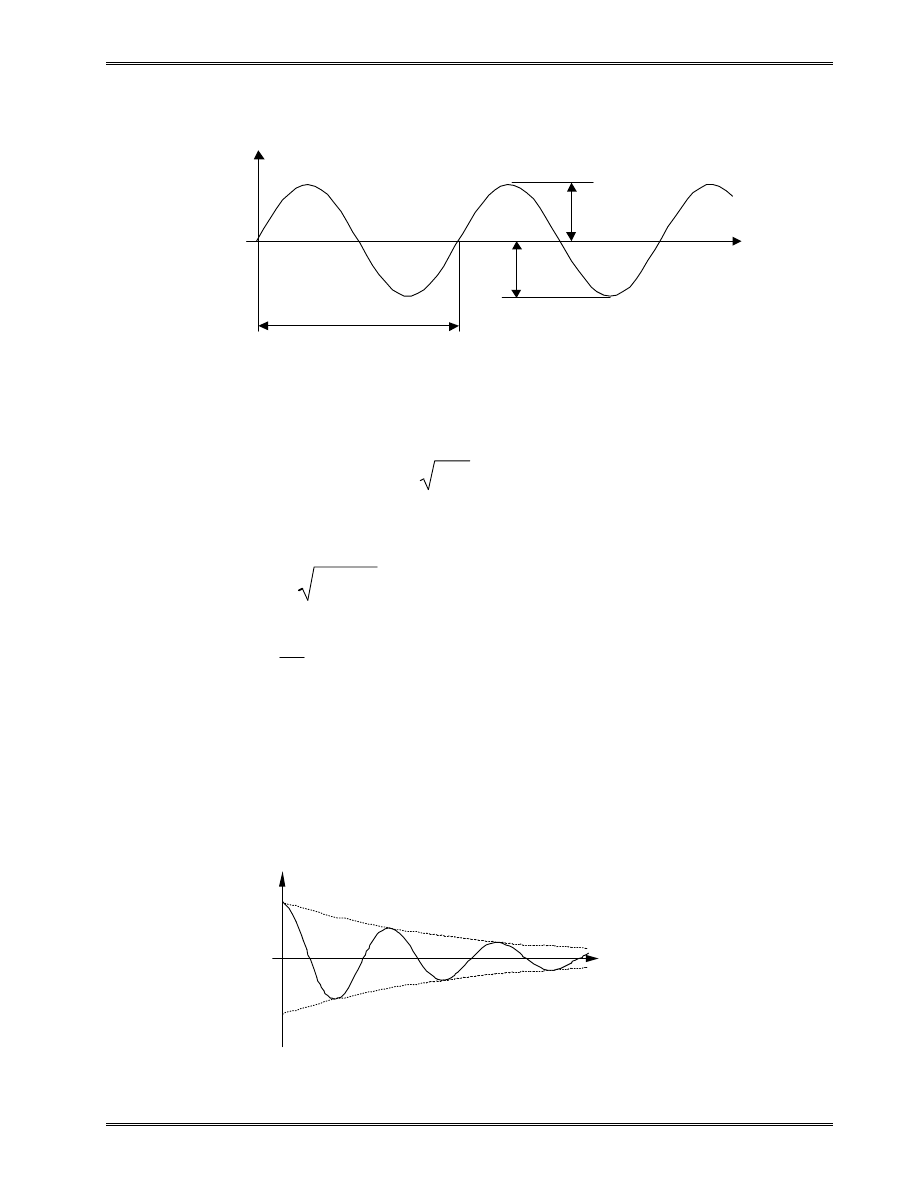
we have the damped natural frequency:
2
1
ξ
ω
ω
−
=
d
,
(6)
where
c
c
c
=
ξ
(damping ratio).
For structural damping:
15
.
0
0
<
≤
ξ
(usually 1~5%)
ω
ω
≈
d
.
(7)
Thus, we can ignore damping in normal mode analysis.
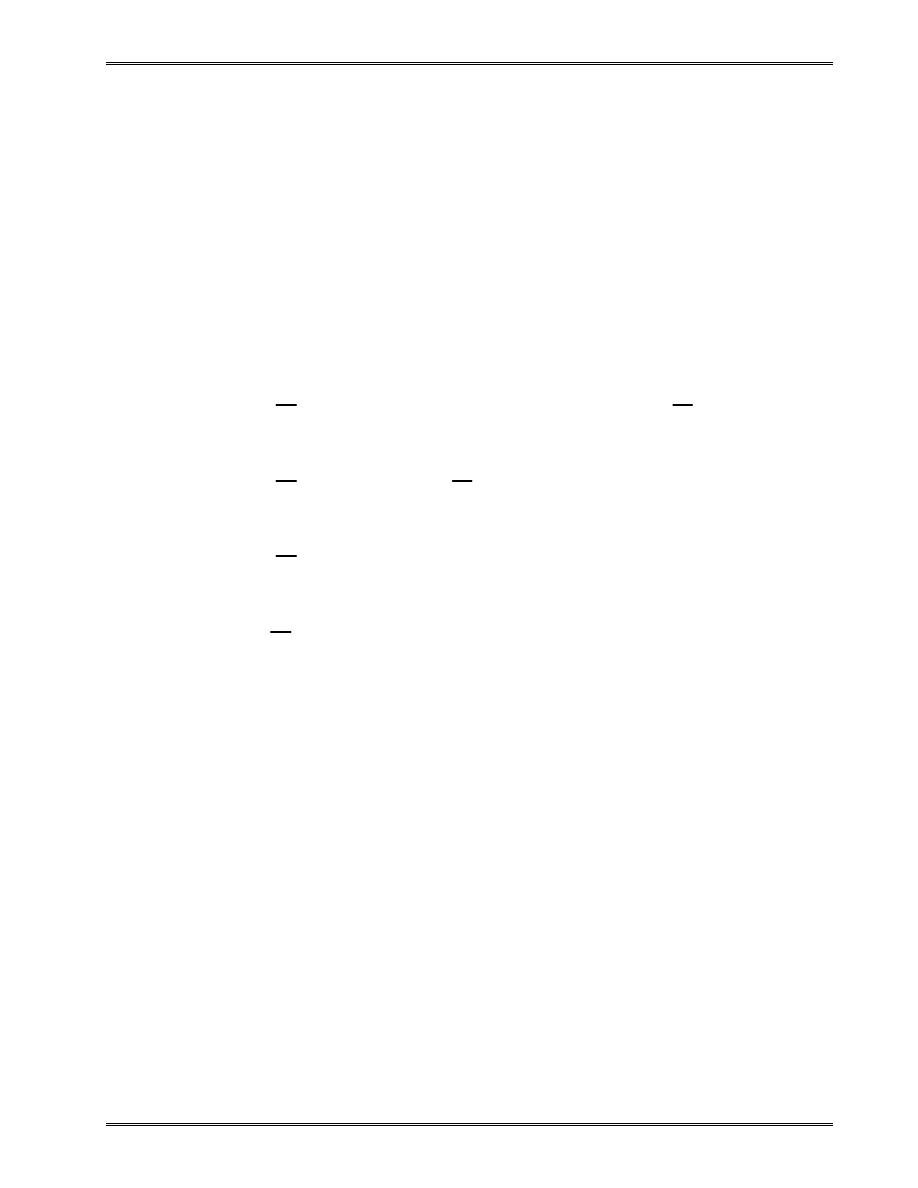
u
t
U
U
T = 1 / f
U n d a m p e d F r e e V i b r a t i o n
u = U s i n w t
u
t
Damped Free Vibration
Lecture Notes: Introduction to Finite Element Method Chapter 7. Structural Vibration and Dynamics
© 1999 Yijun Liu, University of Cincinnati
160
B. Multiple DOF System
Equation of Motion
Equation of motion for the whole structure is
)
(t
f
Ku
u
C
u
M
=
+
+
&
&
&
,
(8)
in which:
u
nodal displacement vector,
M
mass matrix,
C
damping matrix,
K
stiffness matrix,
f
forcing vector.
Physical meaning of Eq. (8):
Inertia forces + Damping forces + Elastic forces
= Applied forces
Mass Matrices
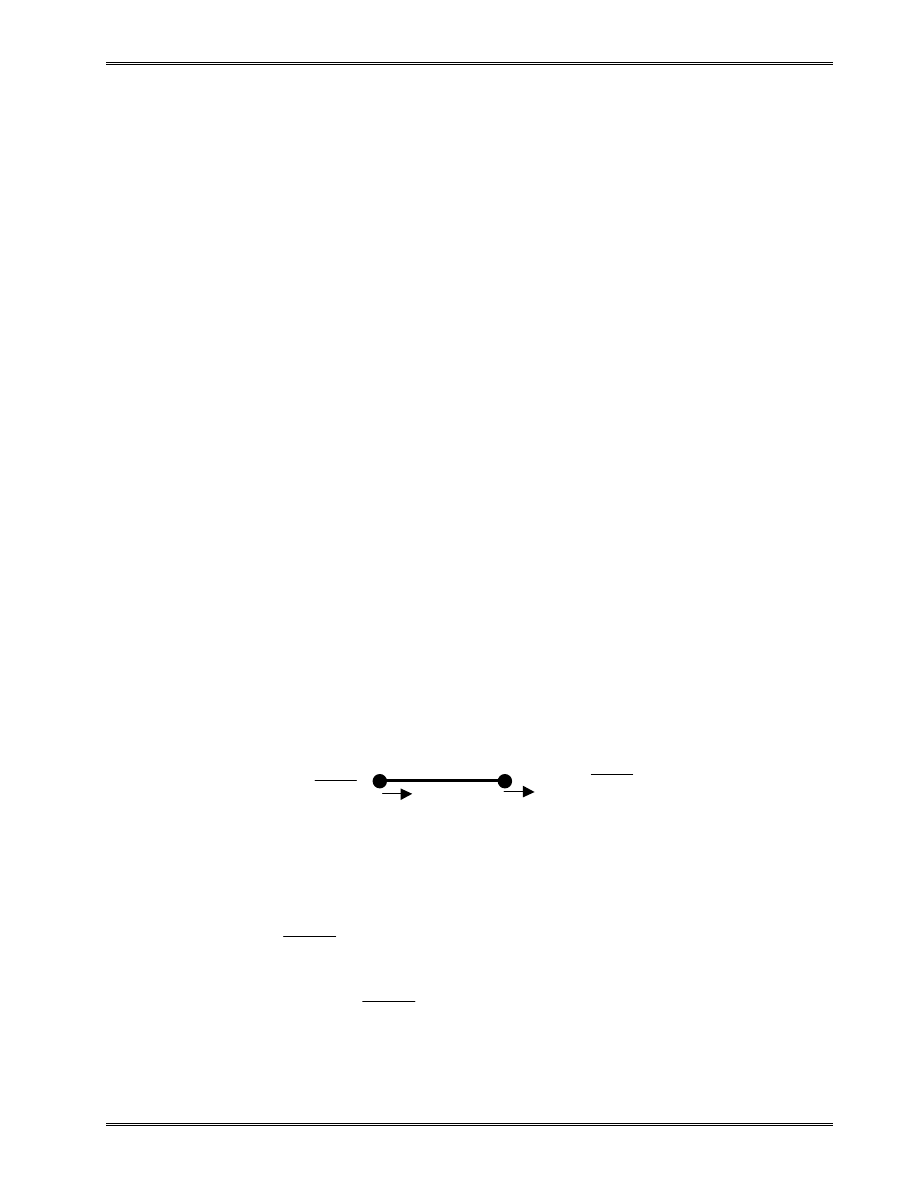
Lumped mass matrix (1-D bar element):
1
ρ,A,L 2
u
1
u
2
Element mass matrix is found to be
4
4 3
4
4 2
1
matrix
diagonal
2
0
0
2
=
AL
AL
ρ
ρ
m
2
1
AL
m
ρ
=
2
2
AL
m
ρ
=
Lecture Notes: Introduction to Finite Element Method Chapter 7. Structural Vibration and Dynamics
© 1999 Yijun Liu, University of Cincinnati
161
In general, we have the consistent mass matrix given by
dV
V
T
∫
=
N
N
m
ρ
(9)
where N is the same shape function matrix as used for the
displacement field.
This is obtained by considering the kinetic energy:
( )
( ) ( )
u
N
N
u
u
N
u
N
u
m
u
m
&
43
42
1
&
&
&
&
&
&
&
&
∫
∫
∫
∫
=
=
=
=
=
Κ
V
T
T
V
T
V
T
V
T
dV
dV
dV
u
u
dV
u
mv
ρ
ρ
ρ
ρ
2
1
2
1
2
1
2
1
)
2
1
(cf.
2
1
2
2
Bar Element (linear shape function):
[
]
3
/
1
6
/
1
6
/
1
3
/
1
1
1
2
1
u
u
AL
ALd
V
&
&
&
&
=
−
−
=
∫
ρ
ξ
ξ
ξ
ξ
ξ
ρ
m
(10)
Lecture Notes: Introduction to Finite Element Method Chapter 7. Structural Vibration and Dynamics
© 1999 Yijun Liu, University of Cincinnati
162
Element mass matrices:
⇒
local coordinates
⇒
to global coordinates
⇒
assembly of the global structure mass matrix M.
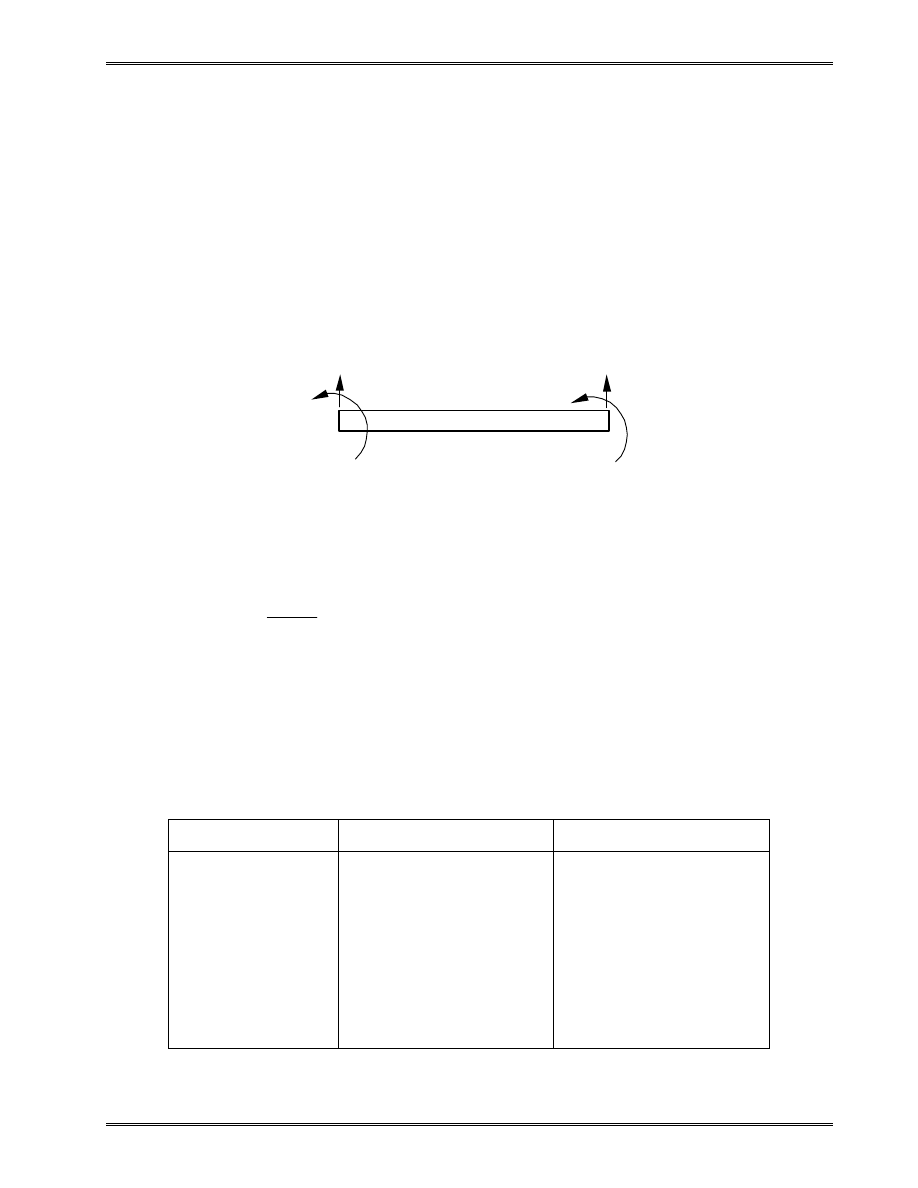
Simple Beam Element:
4
22
3
13
22
156
13
54
3
13
4
22
13
54
22
156
420
2
2
1
1
2
2
2
2
θ
θ
ρ
ρ
&
&
&
&
&
&
&
&
v
v
L
L
L
L
L
L
L
L
L
L
L
L
AL
dV
T
−
−
−
−
−
−
=
=
∫
V
N
N
m
(11)
Units in dynamic analysis (make sure they are consistent):
Choice I
Choice II
t (time)
L (length)
m (mass)
a (accel.)
f (force)
ρ (density)
s
m
kg
m/s
2
N
kg/m
3
s
mm
Mg
mm/s
2
N
Mg/mm
3
1
1
θ
v
2
2
θ
v
ρ, A, L
Wyszukiwarka
Podobne podstrony:
Chapt 07 Lect04
Chapt 01 Lect01
Chapt 02 Lect01
Chapt 06 Lect01
Chapt 05 Lect01
Chapt 03 Lect01
Chapt 07 Lect02
Chapt 04 Lect01
Chapt 07 Lect03
Chapt 07
EŚT 07 Użytkowanie środków transportu
07 Windows
07 MOTYWACJAid 6731 ppt
Planowanie strategiczne i operac Konferencja AWF 18 X 07
Wyklad 2 TM 07 03 09
więcej podobnych podstron