ALGORYTMY PRZETWARZANIA SYGNAŁÓW 2007/2008
1
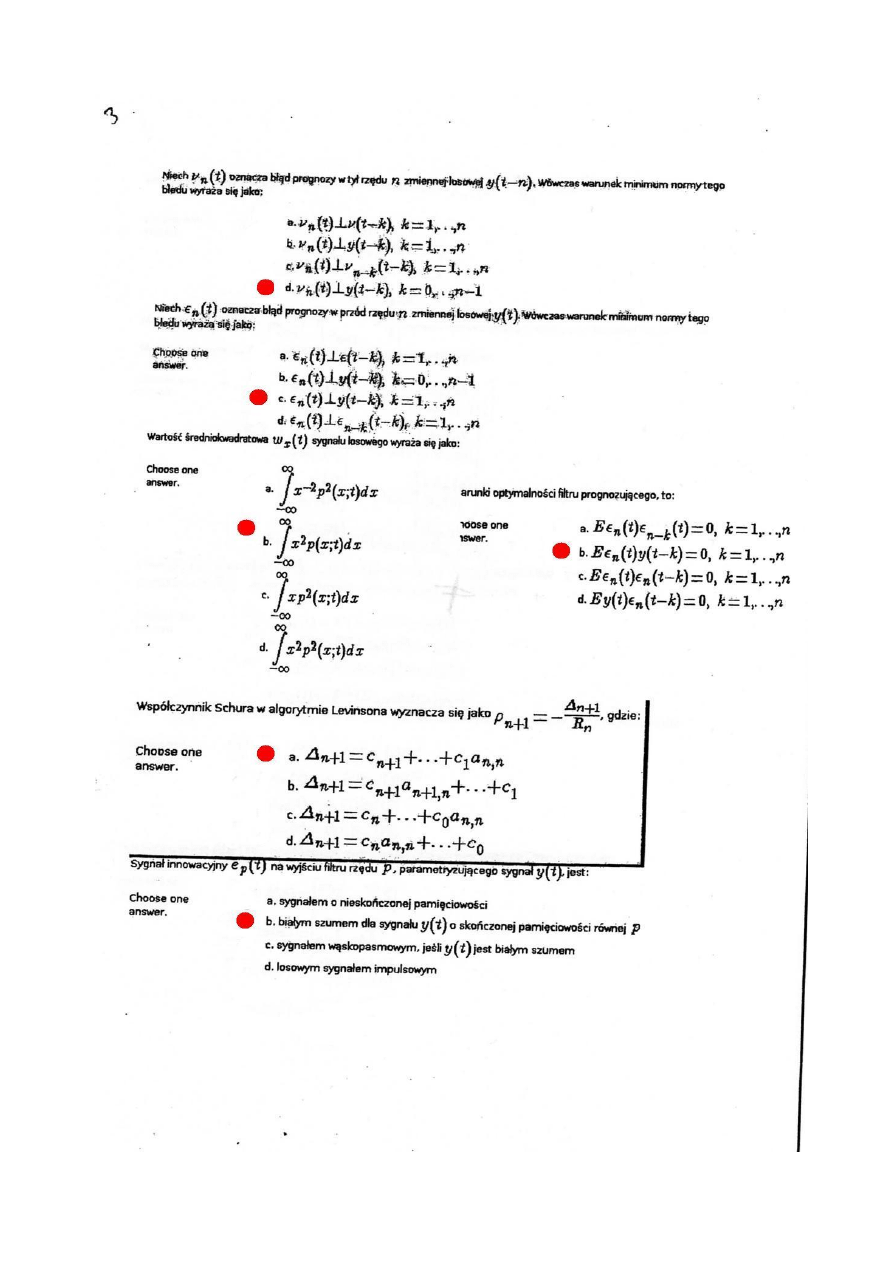
1.Wartosc średnia
)}
(
{
)
,
(
)
(
t
x
E
dx
t
x
p
x
t
x
2.Autokowariancja
- autokorelacja sygnału scentrowanego
))
(
)
(
))(
(
)
(
{(
)
,
(
2
2
1
1
2
1
t
t
x
t
t
x
E
t
t
c
x
x
xx
3. Wzór na autokorelacje
)}
(
)
(
{
)
,
,
,
(
)
,
(
2
1
2
1
2
1
2
1
2
1
2
1
t
x
t
x
E
dt
dt
t
t
x
x
p
x
x
t
t
r
xx
4.Co umożliwia filtr innowacyjny?
- pozwala na implementacje filtrów o strukturze kaskadowej, łatwa modyfikacja długości filtru.
Każdy segment filtru realizuje rotację hiperboliczną elementów wejściowych
5.Sekwencja kołowa: sin, tag, macierze
i
i
i
i
i
cos
sin
sin
cos
)
(
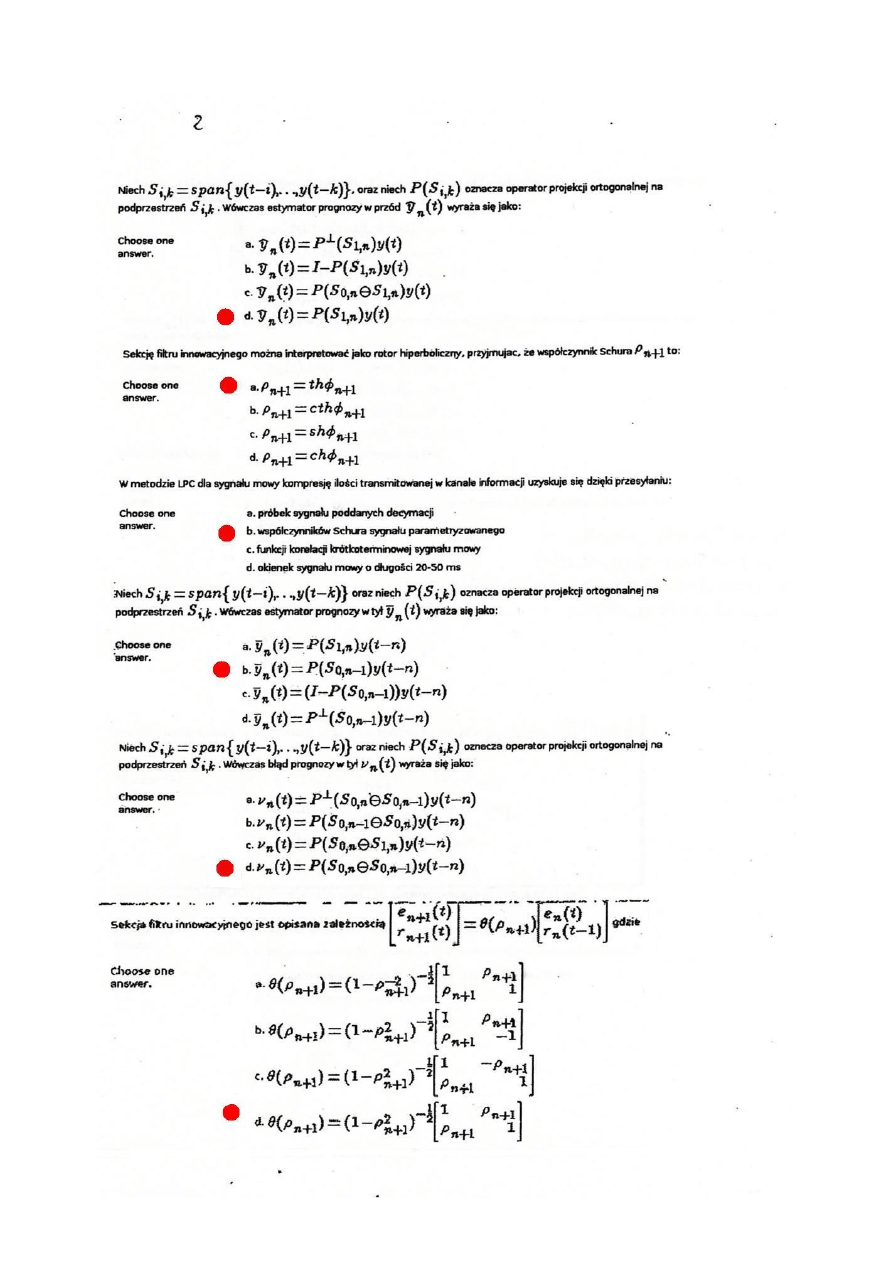
6.Dla jakich sygnałów filtr parametryczny jest szybko (krótko) zbieżny?
- wąskopasmowych
Poprawa jakości estymacji zależy od szybkości malenia wartości funkcji wariancji:
- sygnał szerokopasmowy – jakość estymacji poprawia się powoli (wysokie rzędy filtrów)
- sygnał wąskopasmowy – jakość estymacji poprawia się szybko (filtry niskich rzędów)
7.Sygnal wejściowy Ao,Bo wyjściowy Po
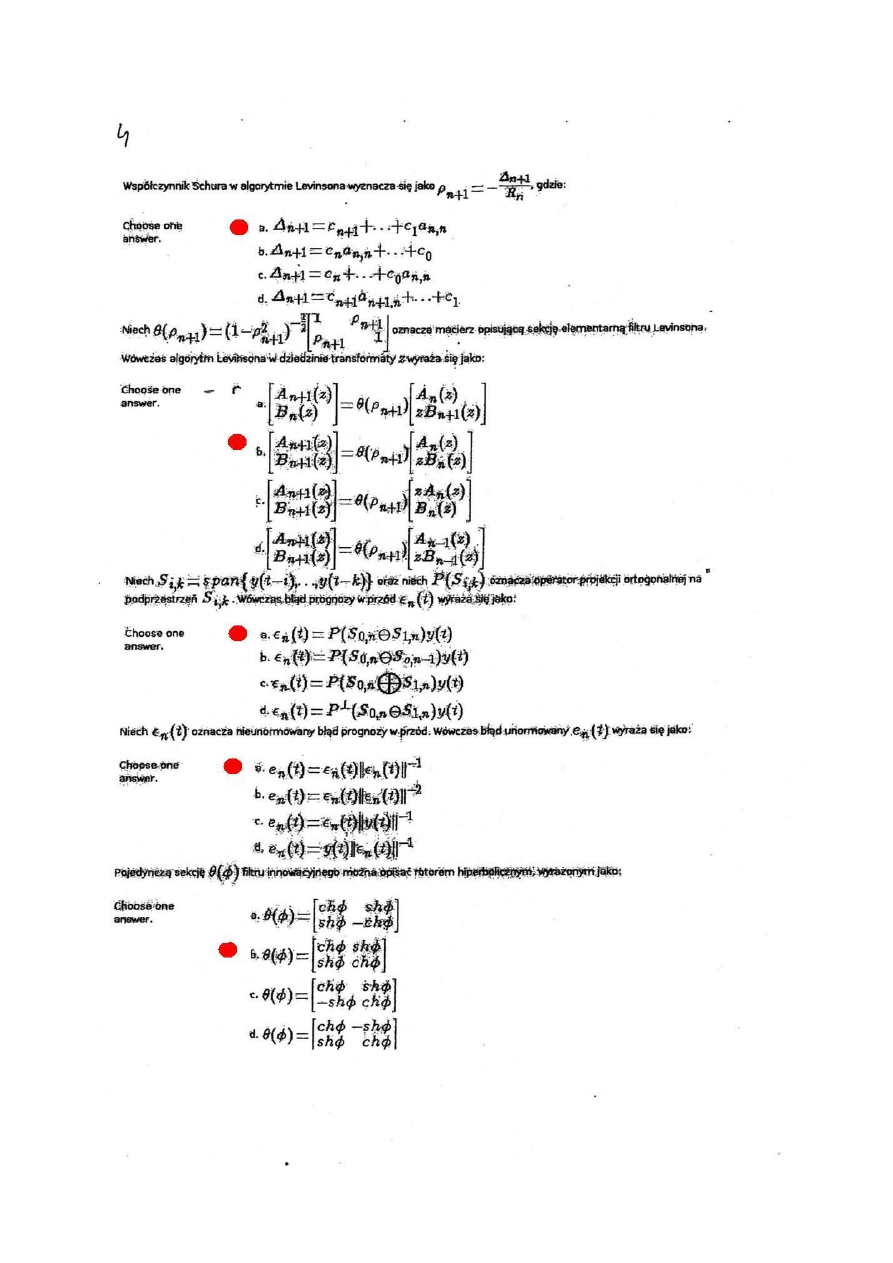
8.Algorytm Lewinsona
)
(
)
(
)
(
)
(
)
(
1
1
1
z
zB
z
A
z
B
z
A
n
n
n
n
n
9.
p
p
2
10.Filtr bezstratny
- cala moc przenoszona z we na wy
- macierz opisująca poszczególną sekcje filtru musi być ortogonalna, inaczej bezstratność suma
mocy doprowadzonych do sekcji filtru musi być równa sumie mocy wyprowadzonych z sekcji
11. Warunek macierzy Toeplitza
- C(i,k)=C(k-i)
12. Z czego wynika stabilność filtru modelującego?
- z jego bezstratności
13. Współczynniki A0=B0, co oznacza (jakiś stosunek - chyba A0/A1 w filtrze modelującym):
- całkowite odbicie NA WEJŚCIU
ALGORYTMY PRZETWARZANIA SYGNAŁÓW 2007/2008
2
14.Transmitancja Ao/Ap filtru modelującego, co oznacza, gdy:
-Bo=Ao – czwórnik w warunkach całkowitego odbicia
-Bo=0 Ao/Ap przy B0=0(warunek całkowitego rozproszenia na wejściu) stanowi
ortogonalną realizację transmitancji Ap^-1 tj. transmitancji filtru modelującego.
15.Wektory progowe w tył
16.Ortogonalnosc filtru na wej. i wyj.
17.Macierze Ap/Ao w filtrze innowacyjnym
0
0
22
21
12
11
0
0
B
A
B
A
p
Bp
Ap
Z tego Ap/A0 = Θ11 / przy B0=0
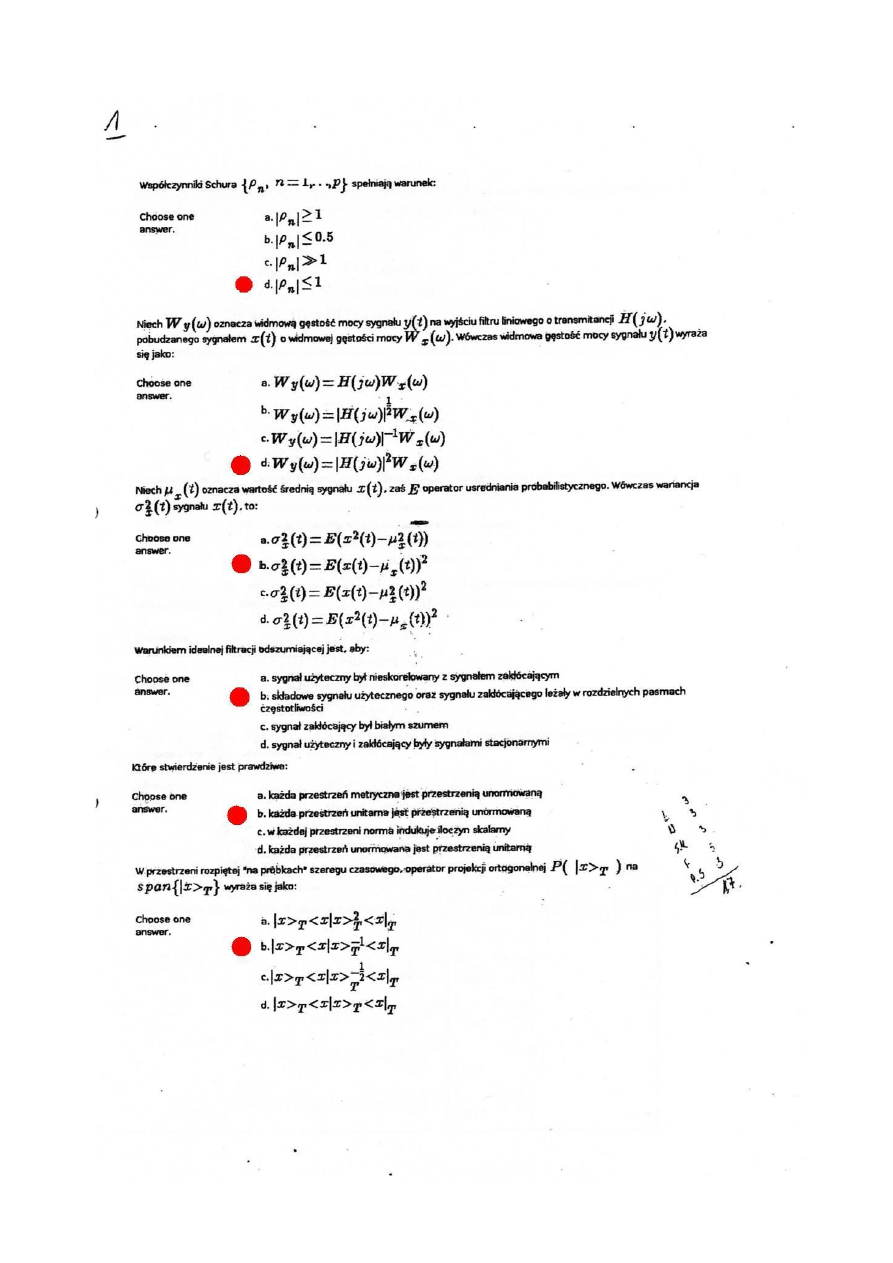
18.Współczynnik Schura spełnia warunek:
1
1
1
n
n
19.Z czego wynika stabilność numeryczna filtru innowacyjnego?
-stabilność numeryczna wynika z unormowania (do jedności) odchylenia standardowego
wszystkich sygnałów propagowanych w strukturze filtru
-bieguny musze leżeć wewnątrz kola jednostkowego (marginalnie na kole) zapewnia to J
ortogonalność
20.Na wyjściu Ap, Bp na wejściu A0, B0 jaka zależność opisuje filtr?
Czwórnik opisany macierzą rozproszenia
0
0
22
21
12
11
0
0
B
A
B
A
p
Bp
Ap
21.B=0, co oznacza, - brak strat energii
Warunek całkowitego rozproszenia na wejściu
22. Autokorelacja
- jest funkcją parzysta
)
(
)
(
k
r
k
r
xx
xx
23. Warunki optymalności filtru
-
0
,
k
n
n
a
R
-
0
)
(
)
(
k
t
y
t
E
n
-
0
)
(
...
)
1
(
)
(
,
1
,
n
k
C
a
k
C
a
k
C
n
n
n
24. Warunek zbieżności algorytmu Levinsona
1
1
n
25. Rotor hiperboliczny (filtr innowacyjny):
i
i
i
i
i
cosh
sinh
sinh
cosh
)
(
ALGORYTMY PRZETWARZANIA SYGNAŁÓW 2007/2008
3
26. Wzór na macierz J-ortogonalna
J
J
p
p
*
27. Pytanko o wyznaczanie An+1(z) i Bn+1(z)
)
(
)
(
)
(
)
(
)
(
1
1
1
z
zB
z
A
z
B
z
A
n
n
n
n
n
28. Norma:
)
,
(
||
||
2
x
x
x
lub inna postać
2
/
1
)
,
(
||
||
x
x
x
29. Kilka pytań z operatorem projekcji
30. Operacja normalizacji:
1
)
(
)
(
)
(
t
t
t
E
n
n
n
31. Przestrzeń unitarna i unormowana
- Unitarna zawiera się w unormowanej, a ta z kolei zawiera się w metrycznej
32. co te indeksy przy S oznaczają
- co oznacza prognoza 'w przód' i 'w tył'
- co to jest suma ortogonalna (+) i uzupełnienie ortogonalne (-)
33. Błędy estymatorów
34. Kiedy wystąpi idealna filtracja odszumiająca?
Kiedy z sygnału obserwowanego y(t) wyeliminujemy sygnał niepożądany n(t) odzyskując tym
samym sygnał źródłowy x(t) po stronie odbiorczej
35. Wzór na błąd średniokwadratowy wyznaczany w sposób rekurencyjny
)
1
(
)
(
)
1
(
2
1
n
n
R
n
R
)}
(
{
)
,
(
)
(
2
2
t
x
E
dx
t
x
p
x
t
w
x
- wartość średniokwadratowa
36. Zbieżność algorytmu, dla jakich c jak zbiega
37. Filtr modelujący, jaka macierz O, gdy wsp. Schura =
sin
cos
sin
sin
cos
38. widmowa gęstość mocy (dla autokorelacji jest
xx
r a dla autokowariancji jest
xx
c )
d
e
r
j
xx
)
(
39. Warunki liniowości układu (jednorodność + addytywność = liniowość)
- jednorodność
)]
(
[
)]
(
[
t
x
F
c
t
x
c
F
- addytywność
)]
(
[
)]
(
[
)]
(
)
(
[
2
1
2
1
t
x
F
t
x
F
t
x
t
x
F
unitarna
unormowana
metryczna
ALGORYTMY PRZETWARZANIA SYGNAŁÓW 2007/2008
4
40. Warunki wystąpienia ograniczonej odpowiedzi impulsowej
- przyczynowy
0
)
(
t
h
, dla
0
t
- BIBO stabilny
dt
t
h )
(
41. Rozkład biegunów na płaszczyźnie S i Z
płaszczyzna S
-symetrycznie po obu stronach osi IM
-jeśli układ stabilny-wszystkie bieguny w lewej półpłaszczyźnie, zera dowolnie
płaszczyzna Z
-tez symetryczność
-stabilność- bieguny wewnątrz okręgu jednostkowego
-stabilność marginalna - na okręgu
-brak stabilności na zewnątrz
42. Faktoryzacja Choleskiego:
1
p
t
p
p
C
A
A
43. Szybkość zbieżności algorytmu Levinsona
44. Jeśli na wejściu jest A0 i Bp, a na wyjściu Ap i B0, to, która zależność występuje między
macierzami i rozszczepieniem:
p
p
B
A
B
A
0
0
45. Warunek idealnego odszumiania - nieskorelowanie i 3 razy cos ze skorelowaniem
- idealne odszumienie jest możliwe, gdy sygnał nadawany i zakłócający są ze sobą nieskorelowane
46. Rotor kołowy
cos
sin
sin
cos
47. Współczynniki Schura:
))
1
(
),
(
(
1
t
r
t
e
n
n
n
- dla filtru innowacyjnego
))
1
(
),
(
(
1
1
t
r
t
e
i
i
i
- dla filtru modelującego
49. Wariancja
2
2
))
(
)
(
(
)
(
t
t
x
E
t
x
50. Gęstość rozkładu prawdopodobieństwa (filtry prognozujące):
- jednowymiarowa
51. Zależność sygnałów na wejściu i wyjściu filtru modelującego:
- kowariancja i widmowa gęstość mocy są sobie równe
52. Bezstratność filtru modelującego związana jest z:
- J- ortogonalność (chyba taką odp zaznaczyłem, ale nie mam pojęcia, jaka jest poprawna)
ALGORYTMY PRZETWARZANIA SYGNAŁÓW 2007/2008
5
ALGORYTMY PRZETWARZANIA SYGNAŁÓW 2007/2008
6
ALGORYTMY PRZETWARZANIA SYGNAŁÓW 2007/2008
7
ALGORYTMY PRZETWARZANIA SYGNAŁÓW 2007/2008
8
ALGORYTMY PRZETWARZANIA SYGNAŁÓW 2007/2008
9
Wyszukiwarka
Podobne podstrony:
test nr 7 wyrażenia regularne, STUDIA, LIC, TECHNOGIE INFORMACYJNE POLONISTYKA ZAOCZNE UW Uniwersyt
Opracowanie pyta
psychologia opracowanie pyta
analiza sensoryczna opracowane pytania testowe poprawione
b, Banki danych, Opracowane przez dzielnego Remigiusza Boguszewicza opracowanie pyta˙ egzaminacyjnyc
opracowanie pyta na egzamin
Maszynoznawstwo - opracowanie pyta, Kopia
Opracowania pyta
test nr 2 podstawowe pojęcia I, STUDIA, LIC, TECHNOGIE INFORMACYJNE POLONISTYKA ZAOCZNE UW Uniwersy
zarzadzanie opracowanie wersja testowa2, Zarządzanie i inżynieria produkcji, Semestr 2, Podstawy Zar
m sadowa2 00pyta ä opisowych, ale mniej opisane za to troche pyta ä testowych
opracowanie pyta
botanika egzamin opracowanie pyta, Studia, Ogrodnictwo, Botanika
opracowanie pyta biochemia 97-03 2011, biochemia żywienia
więcej podobnych podstron