M a s z y n o z n a w s t w o
S t r o n a
| 1
P o l i t e c h n i k a P o z n a ń s k a
MASZYNOZNAWSTWO
Maszyna - za maszynę uważa się całość powiązanych ze sobą elementów z których przynajmniej
jeden jest ruchomy, wraz z odpowiednimi urządzeniami roboczymi, układami sterowania, zasilania
itp., które są połączone razem w celu określonego zastosowania w szczególności do przetwarzania,
obrabiania, przemieszczania i pakowania materiałów.
Maszynoznawstwo – jest to nauka o budowie i zasadach działania maszyn. To encyklopedyczny zbiór
wiedzy o maszynach oraz współpracujących z nimi urządzeniach technicznych.
Mechanizm – układ połączonych ze sobą części maszyn mogących wykonywać określony ruch w
wyniku pobrania energii mechanicznej. W teorii ruchu jest to łańcuch kinetyczny w którym jeden
człon jest nieruchomy (ostoja) pozostałe zaś wykonują ściśle określone ruchy.
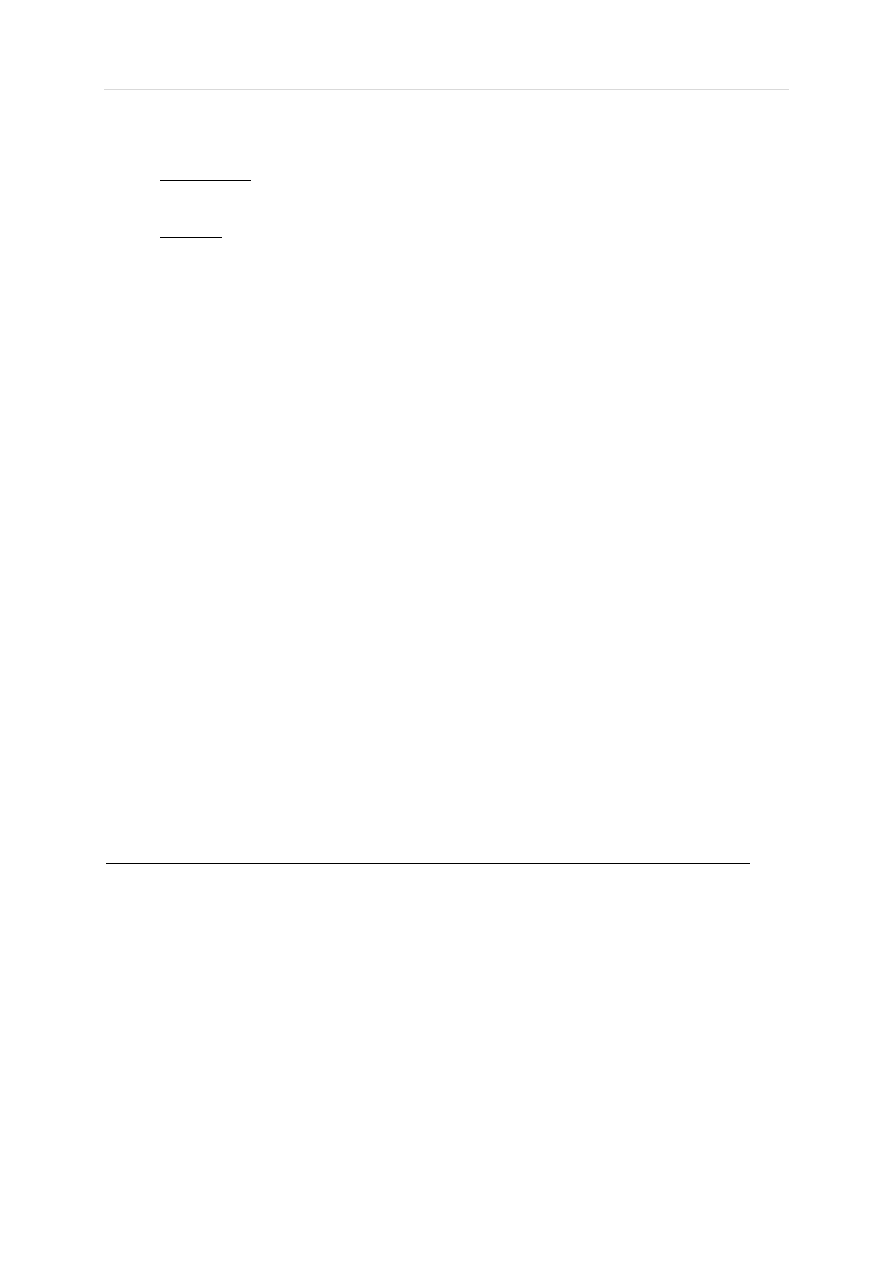
Schemat budowy maszyny:
E
I
M
U
S
T
R
maszyna
S – silnik
T – transmisja
R – elementy, układy robocze
U – skutek użyteczny
M – masa
E – energia
I – informacja
S + T = układ napędowy
S + T + R = maszyna
Użyteczne działanie maszyn – uzewnętrznia się najczęściej jako przetworzenie materii realizowane w
układzie roboczym maszyny.
Energia pobierana z silnika napędowego musi być przekształcona w układnie napędowym tak, aby
odpowiadała wymaganym parametrom energetycznym układu roboczego.
Sterowanie układem roboczym oraz dozowanie masy i natężenia energii jest realizowane przez
przetwarzanie informacji z udziałem człowieka lub automatycznie.
Wynik działania maszyny można rozpatrywać jako skutek przetwarzania Energii, Masy i Informacji.
Podstawowe cechy i parametry maszyn: (3 cechy)
1. Funkcjonalność, to poprawne spełnienie funkcji przez maszynę do których jest przeznaczona
2. Trwałość i niezawodność, to uzyskanie żądanego prawdopodobieństwa dobrej i bezawaryjnej
pracy maszyny przy danych obciążeniach, w założonym okresie nie krótszym od żądanego
(związane z obliczeniami wytrzymałościowymi)
3. Optymalność, to zapewnienie jak najlepszego spełnienia przez maszynę zadania w
określonych warunkach ze względu na założone kryterium.
M a s z y n o z n a w s t w o
S t r o n a
| 2
P o l i t e c h n i k a P o z n a ń s k a
Przegląd maszyn i ich podział:
1. technologiczne – wykorzystuje się je do przetwarzania surowców i półwyrobów, poprzez
zmianą kształtu , objętości, własności fizycznych lub chemicznych i wytworzenia w ten
sposób gotowego wyrobu lub półwyrobu np.: walcarki (huty), młoty do kucia, prasy, maszyny
odlewnicze, górnicze, poligraficzne, włókiennicze.
2. transportowe – służą do zmiany położenia ciał stałych, cieczy i gazów. Maszyny
transportowe dzielimy na:
- maszyny o zasięgu nieograniczonym.
- maszyny o zasięgu ograniczonym.
Do maszyn o zasięgu nieograniczonym zaliczamy pojazdy szynowe, pojazdy samochodowe,
okręty, samoloty.
Maszyny o zasięgu ograniczonym to dźwignice, przenośniki (przemieszczające materiały
transportowe za pomocą cięgien), przenośniki bezcięgnowe, przenośniki przemieszczające
materiał transportowany za pomocą medium pośredniego (przenośniki hydrauliczne i
pneumatyczne).
3. energetyczne – wytwarzają z energii mechanicznej inne rodzaje energii np.: prądnice,
maszyny elektryczne, sprężarki, silniki itp.
4. informatyczne –
a. maszyny kontrolno-sterujące,
b. informatyczne (matematyczne). Przetwarzają informacje które na podstawie żądanego
algorytmu dokonują niezbędnych operacji matematycznych.
5. cybernetyczne – funkcjonują w oparciu o posiadaną sztuczną inteligencji (roboty wyposażone
w układy do rozpoznawania obrazów i kształtów, samodzielnej nawigacji, samokontroli).
Źródła i postacie energii:
Podstawą działania wszystkich maszyn są przemiany energii które w nich zachodzą. Energią określa
się jako najbardziej ogólną własność wszelkiego rodzaju ruchu materii. Energię zawierają np.: węgiel,
zbiornik ze sprężonym powietrzem, napięta sprężyna , które w odpowiednich warunkach mogą być
przemienione w pracę.
Z fizycznego punktu widzenia energię dzielimy na:
– mechaniczną
– cieplną
– promieniowanie
– elektryczną
– chemiczną
– jądrową
Spośród procesów technicznych wydzielamy następujące rodzaje:
1. transformację Energii bez zmiany jej postaci,
2.
przemianę Energii z jednej postaci w inną,
np.: zamiana energii elektrycznej w energię mechaniczną
3. przesyłanie Energii
4. kształtowanie Materiałów
np.: obróbka plastyczna, wiórowa, formowanie tworzyw
5. przetwarzanie Materiałów, procesy zmiany własności fizycznych i chemicznych materiałów
6. transport i magazynowanie Materiałów
7.
zmiana postaci Informacji
np.: odbierane i przekazywane informacje nie ulegają zmianie i są kodowane lub
występują jako nośnik informacji
8. przetwarzanie Informacji (zmiana charakteru informacji)
9. przesyłanie Informacji
M a s z y n o z n a w s t w o
S t r o n a
| 3
P o l i t e c h n i k a P o z n a ń s k a
Parametry maszyn:
– moc
– sprawność
(ŋc=ŋ
1
*ŋ
2
*ŋ
3
*...*ŋ
n
)
– praca
– wydajność (teoretyczna i praktyczna)
[ton na godzinę]
– udźwig
[w tonach]
– obroty
[obrotów na minutę]
– prędkość
[metrów na sekundę]
– prędkość obrotowa
[radiany na sekundę]
– okres
– siła lub moment obrotowy
–
ciśnienie
[Paskal 1Pa=N/M
2
]
Techniką przekształceń i przesyłania energii zajmuje się energetyka. Głównym źródłem energii jest
paliwo a głównym paliwem jest ropa naftowa, gaz ziemny, węgiel kamienny i brunatny.
Procesy techniczne powodują, że przedmiot transformacji zmienia:
– własności zewnętrzne
(wygląd, kształt)
– własności wewnętrzne
(strukturę)
– położenie
(współrzędne)
– potencjał
(energię)
W procesach technicznych można wyróżnić strumień główny któremu towarzyszy zazwyczaj
równoległy strumień informacji.
Sprawność to iloraz energii uzyskanej do energii włożonej lub pracy uzyskanej do pracy włożonej.
Ogólne problemy budowy maszyn:
1. Potrzeba – zaspokojenie określonej potrzeby urządzeniem lub maszyną w określonych
warunkach
2. Projektowanie – całokształt postępowania przy realizowaniu zamierzeń inwestycyjnych,
należy uwzględnić:
a. strumień zadań konstrukcyjnych
b. analiza możliwych do zastosowania środków technicznych
c. analiza ekonomiczna przedsięwzięcia
3. Konstrukcja i obliczenia
a. opracowanie założeń związanych z opisem i zasadą działania maszyny, określenie
parametrów liczbowych oraz informacji o warunkach pracy maszyny
b. projekt wstępny, jest to pierwszy etap dobierania cech konstrukcyjnych
c. obliczenia wytrzymałościowe, realizowane są w oparciu o znajomość obciążeń i sił
działających na maszynę.
d. dobór kształtów i wymiarów elementów konstrukcyjnych –
W wyniku tych działań powstaje dokumentacja konstrukcyjna (techniczna)
4. Budowa i badania prototypu
5. Produkcja, decyzja o niej jest wynikiem badań prototypu (produkcja jednostkowa, seryjna,
wielkoseryjna, masowa – dotyczy elementów maszyn stosowanych w różnych maszynach
(znormalizowane)
6. Eksploatacja, to zespół czynności obejmujących planowanie, użytkowanie, obsługiwanie,
przechowywanie i inne przedsięwzięcia mające na celu racjonalne użytkowanie maszyny.
Nieprzestrzeganie racjonalnego użytkowania maszyny określonych przez producenta zwiększa
koszty eksploatacji.
7. Naprawa, to końcowy zabieg w czasie eksploatacji maszyny wynikający z faktu zużywania się
jej poszczególnych części. Rozróżniamy naprawy bieżące i główne. Bieżące wykonuję się w
trakcie eksploatacji maszyn i urządzeń. Naprawy główne po określonym okresie użytkowania,
polegające na wymianie czy regeneracji elementów maszyn.
8. Wycofanie z eksploatacji (kasowanie)
M a s z y n o z n a w s t w o
S t r o n a
| 4
P o l i t e c h n i k a P o z n a ń s k a
Obciążenia wywołują w maszynie powstawanie naprężeń, przemieszczeń i odkształceń.
PODSTAWOWE ZASADY KONSTRUKCJI MASZYN
Konstrukcja, to zespół cech obmyślonych ze wzglądu na określoną funkcję maszyny lub urządzenia.
Proces tworzenia konstrukcji nazywamy konstruowaniem.
Zbiór informacji o strukturze maszyny, będący opisem ich budowy nazywamy zespołem cech
konstrukcyjnych.
Cechy konstrukcyjne mogą być:
– materiałowe
(informacje o materiałach i rodzajach obróbki)
,
– geometryczne
(wymiary geometryczne elementów, odchyłki wymiarowe zapewniające poprawność działania),
– dynamiczne
(polegają na obliczaniu obciążeń działających na maszynę oraz wyznaczenie wytrzymałości)
Konstruowanie zawiera pewne cechy wspólne dla różnych rodzajów maszyn, a wynikają one z:
1. Zastosowania podstawowych części i zespołów w różnych maszynach i urządzeniach. Do
podstawowych części i zespołów maszyn należą: śruby, wały, łożyska, sprzęgła, przekładnie.
2. Występowanie podobnych problemów podczas konstrukcji podobnych maszyn:
– łączenie części
– łączenie wałów
– łożyskowanie
– przenoszenie ruchu
– hamowanie itp.
3. Stosowanie podstawowych zasad konstruowania.
Dwie podstawowe zasady konstruowania:
a. konstrukcja powinna spełniać podstawowe warunki konstrukcyjne w stopniu nie
gorszym od założonego
b. konstrukcja powinna być optymalna w danych warunkach ze względu na podstawowe
kryteria optymalizacji,
Oprócz zasad podstawowych w procesie konstruowania, występują zasady szczegółowe które
nazywamy warunkami konstrukcyjnymi, są to: funkcjonalność, niezawodność, trwałość, sprawność,
lekkość, ergonomiczność, estetyka, bezpieczeństwo itp.
- funkcjonalność, to poprawne spełnienie funkcji przez maszynę do których jest przeznaczona
- trwałość i niezawodność, to uzyskanie żądanego prawdopodobieństwa dobrej i bezawaryjnej
pracy maszyny przy danych obciążeniach, w założonym okresie nie krótszym od żądanego
(Spełnienie tego warunku jest związane z obliczeniami wytrzymałościowymi, zużyciem,
statecznością)
- sprawność – konstrukcja powinna zapewnić uzyskanie zamierzonej sprawności
- lekkość – wiąże się z wyborem materiału oraz rozwiązaniem konstrukcyjnym, konstrukcja jest
lżejsza gdy stosujemy droższe materiały
- względy ergonomiczne – dostosowanie maszyny do obsługującego człowieka, dotyczy to
wygody obsługi, przestrzegania ograniczeń odnośnie hałasu i wibracji oraz ograniczeń
wynikających z przepisów BHP.
- estetyka, ma duży wpływ na psychikę człowieka a tym samym na wydajność pracy
- bezpieczeństwo – w przypadku niektórych maszyn i urządzeń jak maszyny transportowe,
zbiorniki ciśnieniowe, maszyny z dużymi obciążeniami należy oceniać współczynnikami
bezpieczeństwa.
M a s z y n o z n a w s t w o
S t r o n a
| 5
P o l i t e c h n i k a P o z n a ń s k a
Zapis konstrukcji – abstrakcyjny obraz maszyny powstający w myśli konstruktora jest zapisywany
według ogólnie obowiązujących zasad i umożliwia jego wyprodukowanie. Najbardziej
rozpowszechniony zapis konstrukcji to rysunek konstrukcyjny. Rysunki zawierają informacje o
kształcie i wymiarze przedstawionego elementu maszyny, materiale i jego własnościach, oraz
wskazówki montażowe oraz wykonawcze.
METODY OPTYMALIZACJI KONSTRUKCJI
Konstrukcję zapisuje się za pomocą zespołu zmiennych które dzielimy na parametry narzucone w
danym zagadnieniu optymalizacyjnym i zmienne decyzyjne które ustalamy podczas procesu
optymalizacji. Przeprowadzenie optymalizacji wymaga precyzyjnego sformułowania problemu
optymalizacji, to znaczy zbudowania modelu matematycznego danej konstrukcji. Model
matematyczny powinien dobrze przedstawiać rzeczywistą strukturę oraz fizyczną naturę zjawisk
zachodzących w określonym węźle maszyny.
Metodyka tworzenia modelu matematycznego konstrukcji
Aby zbudować model matematyczny należy:
1. Określić wielkości występujące w rozwiązywaniu problemu, czyli zmienne decyzyjne i
parametry
2. Określić obszar dopuszczalny w którym poszukuje się rozwiązania
3. Utworzyć funkcję celu albo odpowiedni algorytm który pozwoli ustalić czy rozwiązanie jest
najlepsze.
Konstruktor może wprowadzić optymalizację konstrukcji ze względu na kryteria:
1. optymalny stan obciążenia
(obciążenia dzielimy na stałe i przypadkowe)
2. dobór materiału
3. optymalna stateczność;
stateczność to taki stan równowagi układu który umożliwia jego skuteczne działanie
ze względu na przyjęte kryterium niezawodności
4. optymalne stosunki wielkości związanych
Metody optymalizacji konstrukcji:
1.
Metoda wariantów konstrukcyjnych:
opracowujemy kilka wariantów i dokonujemy wyboru najlepszej w oparciu o przyjęte kryterium
2.
Metody analityczne:
polegają na utworzeniu modelu matematycznego konstrukcji i analitycznym obliczeniu optymalnej wartości
przyjętej za kryterium
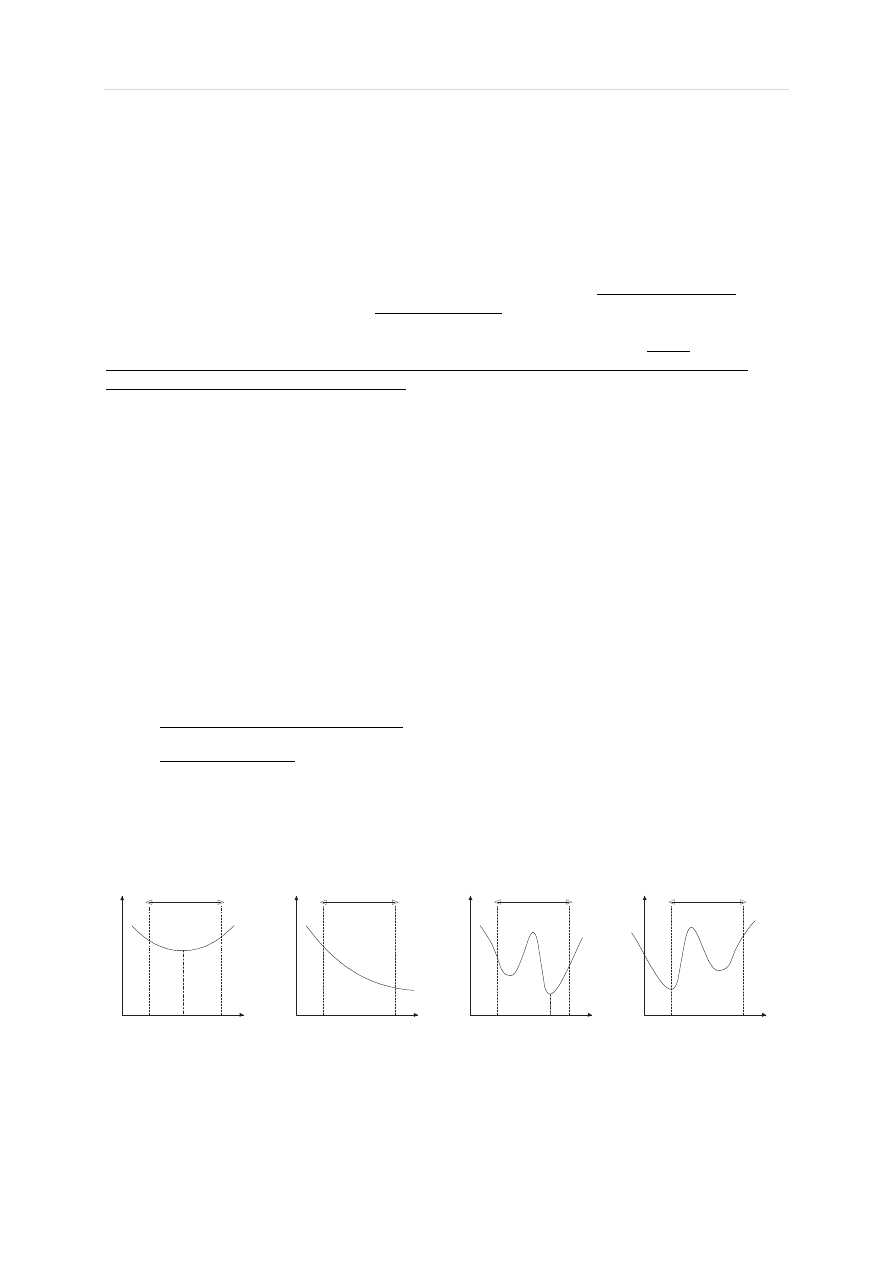
Wszystkie istniejące metody optymalizacji sprowadzają się do poszukiwania optimum funkcji celu w
danym obszarze dopuszczalnym fi.
1)
Φ
x
opt
U
u
opt
2)
Φ
x
opt
U
u
opt
3)
Φ
x
opt
U
u
opt
4)
Φ
x
opt
U
u
opt
u – funkcja celu
x – zmienna decyzyjna
M a s z y n o z n a w s t w o
S t r o n a
| 6
P o l i t e c h n i k a P o z n a ń s k a
ZADANIA KONSTRUKTORA W PROCESIE KONSTRUKCJI MASZYN
W procesie konstruowania maszyn zadania konstruktora są następujące:
1. Dobór schematu kinematycznego
2. Określenie parametrów kinematycznych i dynamicznych
3. Dobór układu maszyny i powiązanie jej zespołów
4. Konstrukcja zespołów
5. Konstrukcja części
6. Obliczenia funkcjonalne, dynamiczne i wytrzymałościowe
W procesie konstrukcji części do zadań konstruktora należy zaliczyć:
1. Ustalenie kształtów i wymiarów elementów tak aby spełniały swe zadanie
2. Ustalenie materiałów, uwzględnia się własności wytrzymałościowe, technologiczne i inne jak
np. ścieralność, odporność na korozję i własności wytrzymałościowe.
3.
Ustalenie w sposób ogólny wykonania części
np. odlew, odkuwka, wyrób walcowany, czy też tłoczony
lub w całości obrabiany mechanicznie.
4.
Ustalenie obróbki powierzchniowej – określa się na podstawie analizy wymaganej jakości
współpracy elementów
np. gładkość, pokrycie galwaniczne, malowanie itp.
5. Ustalenie obróbki cieplnej i cieplno-chemicznej części
(hartowanie, wyżarzanie, ulepszanie cieplne)
Te zabiegi podyktowane są wymaganiami własnościowymi materiału a także i charakterem
współpracy części.
6. Ustalanie dokładności wykonania części
(tolerancje, odchyłki [kształtu, położenia], pasowanie)
WŁASNOŚCI I ZASTOSOWANIE PODSTAWOWYCH ELEMENTÓW MASZYNY
I. ŁĄCZNIKI GWINTOWE (śruby) – jest to połączenie kształtowo-cierne, rozłączne, utworzone
przez dwa elementy zaopatrzone w powierzchnie gwintowe o zbliżonych zarysach i wymiarach ich
przekroju oraz o tym samym skoku i skręcie. Umożliwia to łączenie ich i rozłączenie wzajemnym
ruchem śrubowym oraz przeniesienie obciążeń wzdłużnych.
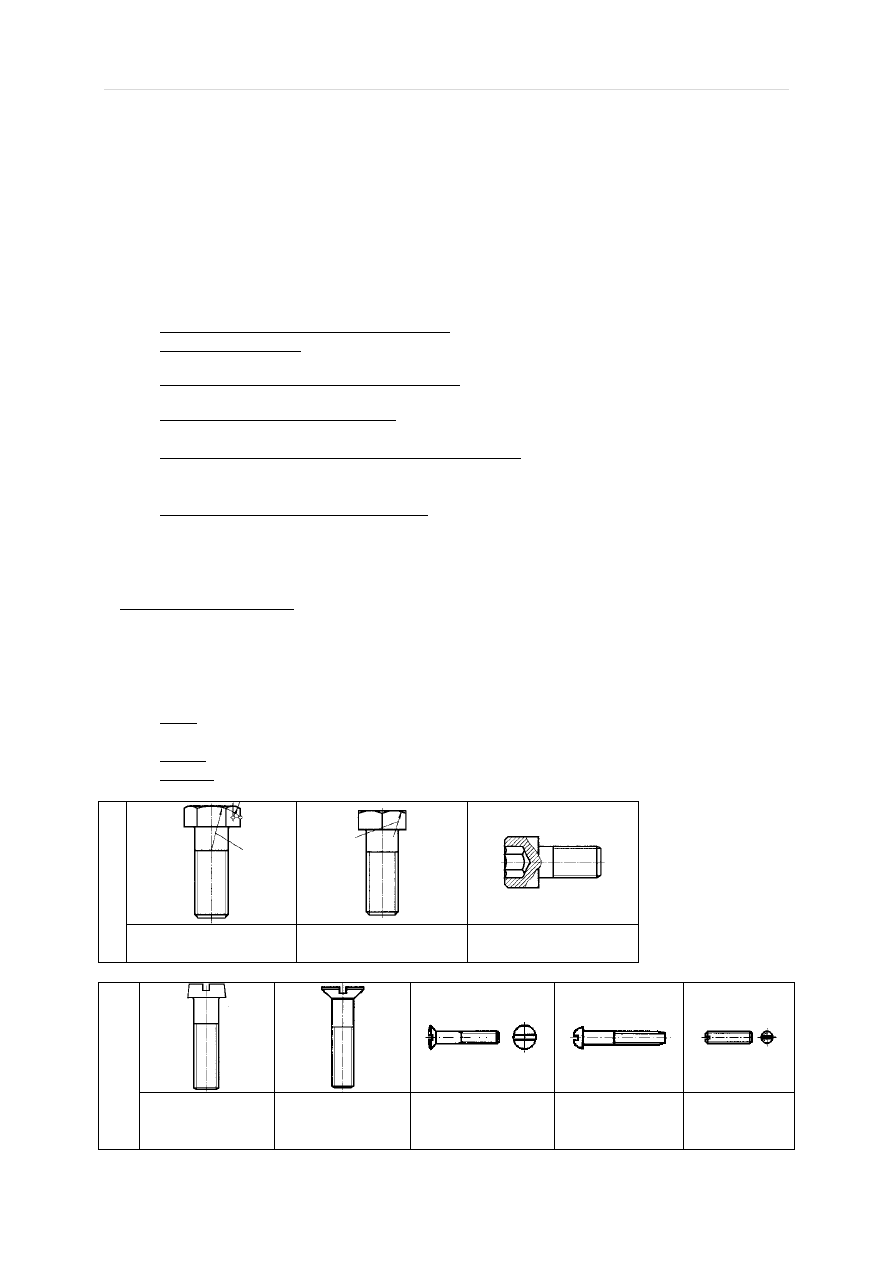
Rozróżniamy trzy rodzaje łączników gwintowych (śrubowych)
a) śruby, są to łączniki mające łeb ukształtowany tak aby można je było zakręcać za pomocą
odpowiedniego klucza
b) wkręty, są to łączniki z łbem mającym nacięcie do wkrętaka za pomocą którego są wkręcane
c) nakrętki, są to elementy współpracujące ze śrubami lub wkrętami
Ś
R
U
B
Y
Z łbem sześciokątnym
Z łbem czworokątnym
Z gniazdem
sześciokątnym
W
K
R
Ę
T
Y
Z łbem
walcowym
płaskim
Z łbem
stożkowym
płaskim
Z łbem stożkowym
soczewkowym
Z łbem kulistym
bez łba
M a s z y n o z n a w s t w o
S t r o n a
| 7
P o l i t e c h n i k a P o z n a ń s k a
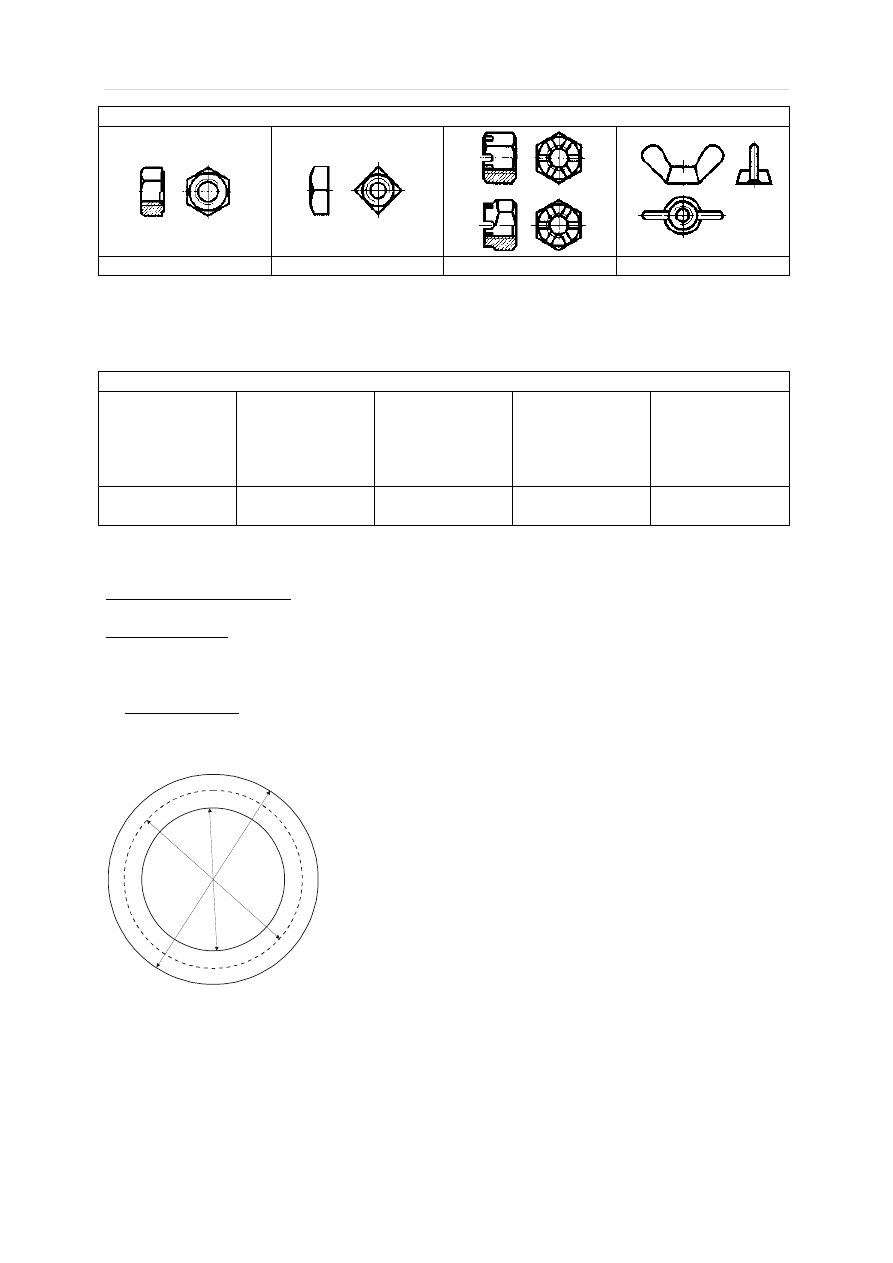
NAKRĘTKI:
Sześciokątna
Czworokątna
Koronowa
Motylkowa
Gwinty:
Podziałka gwintu h
z
jest to odległość sąsiednich zarysów mierzona wzdłuż osi gwintu.
Skok gwintu h jest to przesunięcie zwoju wzdłuż osi przy pełnym jego obrocie.
GWINTY:
trójkątny
trapezowy
symetryczny
trapezowy
niesymetryczny
prostokątny
okrągły
Zastosowanie gwintów metrycznych i trapezowych:
Gwinty metryczne trójkątne o kącie rozwarcia 60° stosowane są jako gwinty złączne (spoczynkowe)
do łączenia elementów maszyn w jedną sztywną całość.
Gwinty trapezowe stosuje się w połączeniach ruchomych jako śruby robocze. Gwinty trapezowe o
kącie rozwarcia 30° mają najniższą sprawność a największą wytrzymałość. Z tego względu są
używane w konstrukcjach obciążonych np. dźwigniki śrubowe.
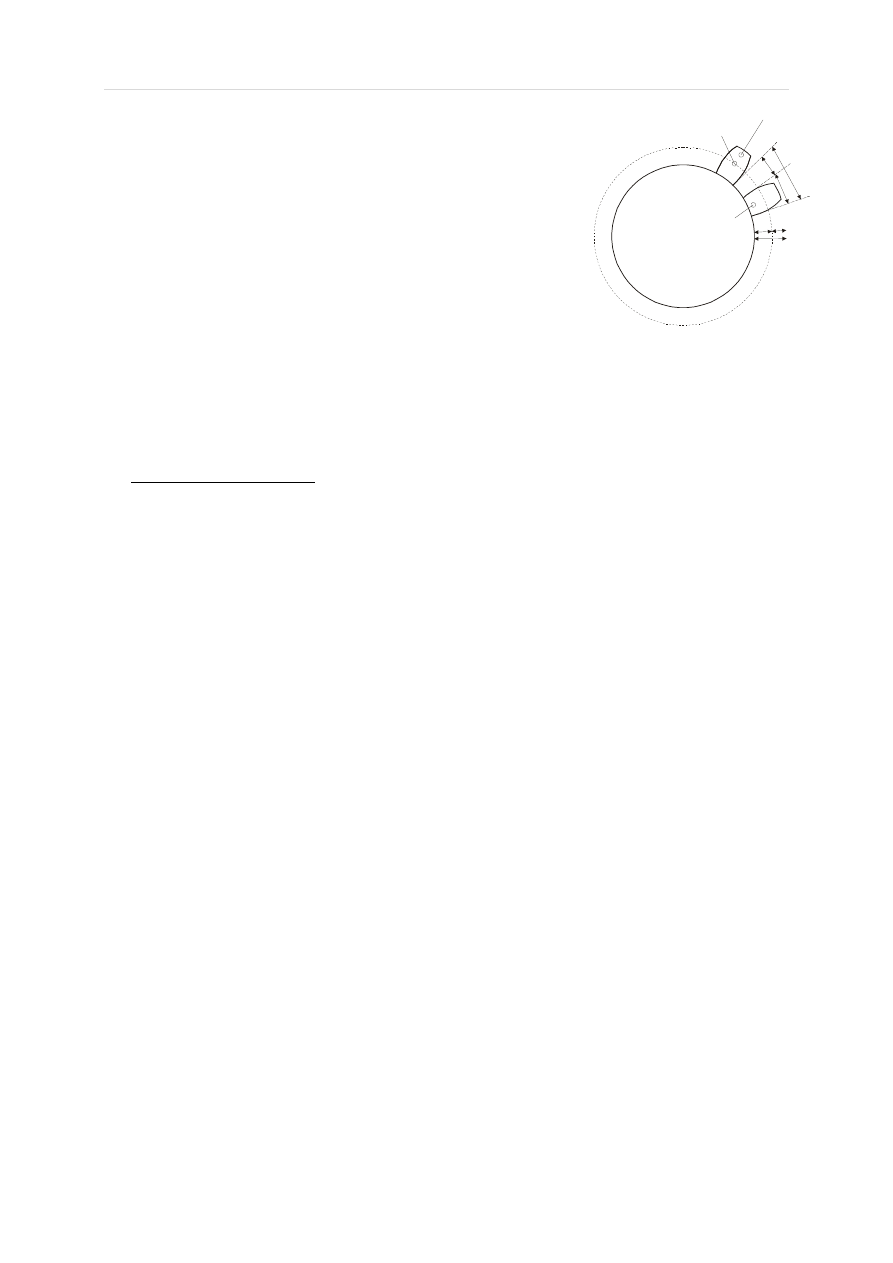
II. KOŁA ZĘBATE
Na wieńcu zębatym wyróżniamy trzy powierzchnie:
d
g
d
w
d
p
Powierzchnia wierzchołków i odpowiadająca im średnica d
g
,
Powierzchnia podziałowa i odpowiadająca im średnica d
p
,
Powierzchnia stóp i odpowiadająca im średnica d
w
,
M a s z y n o z n a w s t w o
S t r o n a
| 8
P o l i t e c h n i k a P o z n a ń s k a
h = h
s
+ h
g
t → długość łuku pomiędzy dwoma sąsiednimi zębami
g → grubość zęba
s → szerokość wrębu
t = g + s
obwód π
·
d
p
= z
·
t
z → liczba zębów
d
p
=
t
/
π
·
z
t
/
π
= m → moduł koła zębatego
(jest podstawową wielkością wymiarów kół zębatych)
! d
p
= m·z !
h
g
= m
h
s
= 1,25m
d
g
= d
p
+h
g
d
w
= d
p
-d
w
= h
s
d
p
= d
w
+h
s
III. ELEMENTY SPRĘśYSTE
Do najczęściej stosowanych w budowie maszyn elementów sprężystych należą sprężyny. Są to
łączniki wykonane w materiałów o niewielkiej odkształcalności a których dużą podatność uzyskuje się
dzięki specjalnemu ich ukształtowaniu.
Zastosowania sprężyn:
1. Nagromadzenie energii w celach napędowych (sprężyny zegarów)
2. Łagodzenie uderzeń i wstrząsów (zderzaki wagonów, resory pojazdów, sprężyny
amortyzacyjne)
3. Dociskanie elementów konstrukcyjnych w czasie ich pracy (s. zaworowe)
4. Pobudzanie lub łagodzenie drgań (sprężyny w urządzeniach wibracyjnych)
5. Mierzenia siły (s. w dynamometrach)
Rodzaje sprężyn:
– śrubowe
– spiralne
– wielopłytkowe
Rysunek sprężyny:
d – średnica pręta sprężyny
h – skok lini śrubowej sprężyny
D
w
– średnica wewnętrzna sprężyny
D
z
– średnica zewnętrzna sprężyny
l
0
– długość sprężyny
t
s
g
ząb
głowa
stopa
h
s
h
g
h
M a s z y n o z n a w s t w o
S t r o n a
| 9
P o l i t e c h n i k a P o z n a ń s k a
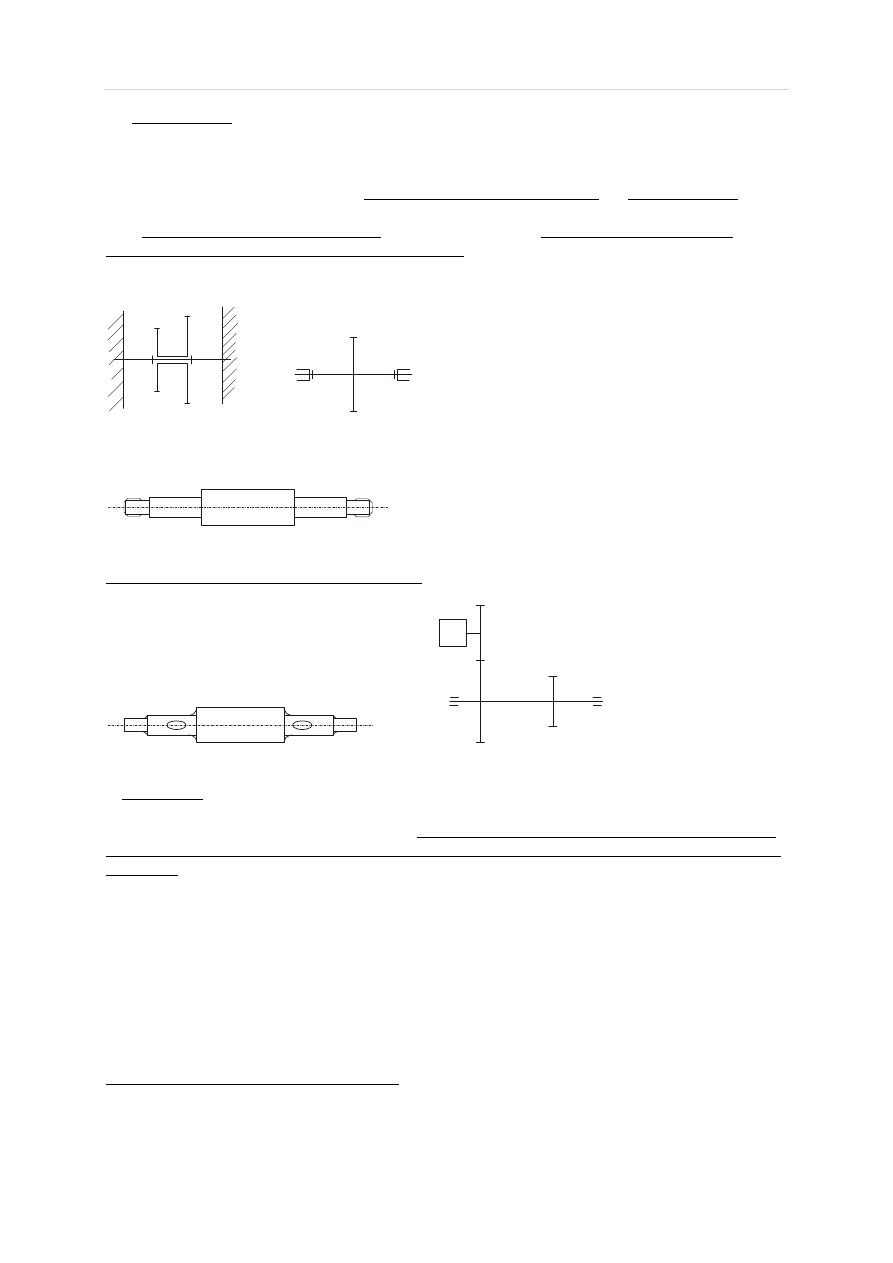
IV. OSIE I WAŁY
Osią lub wałem nazywamy element maszynowy najczęściej mocowany w łożyskach na których
osadzone są części maszynowe wykonujące ruchy obrotowe lub wahadłowe
(koła zębate, koła pasowe, jezdne)
.
Wały stosuje się przede wszystkim do przenoszenia momentu obrotowego. Są zawsze ruchome tzn.
obracają się wraz z osadzonymi na nich elementami.
Osie nie przenoszą momentu obrotowego ale są przeznaczone do utrzymywania w określonym
otoczeniu innych obracających się elementów maszyn. Osie mogą być stałe (zamocowane w
uchwytach) i ruchome (osadzone w łożyskach)
oś nieruchoma
oś ruchoma
Osie są z reguły proste, wały mogą posiadać karby lub wykorbienia
oś
Wały napędzają osadzone na nich części.
Karby są znormalizowane, zależne od średnicy!
wał
s
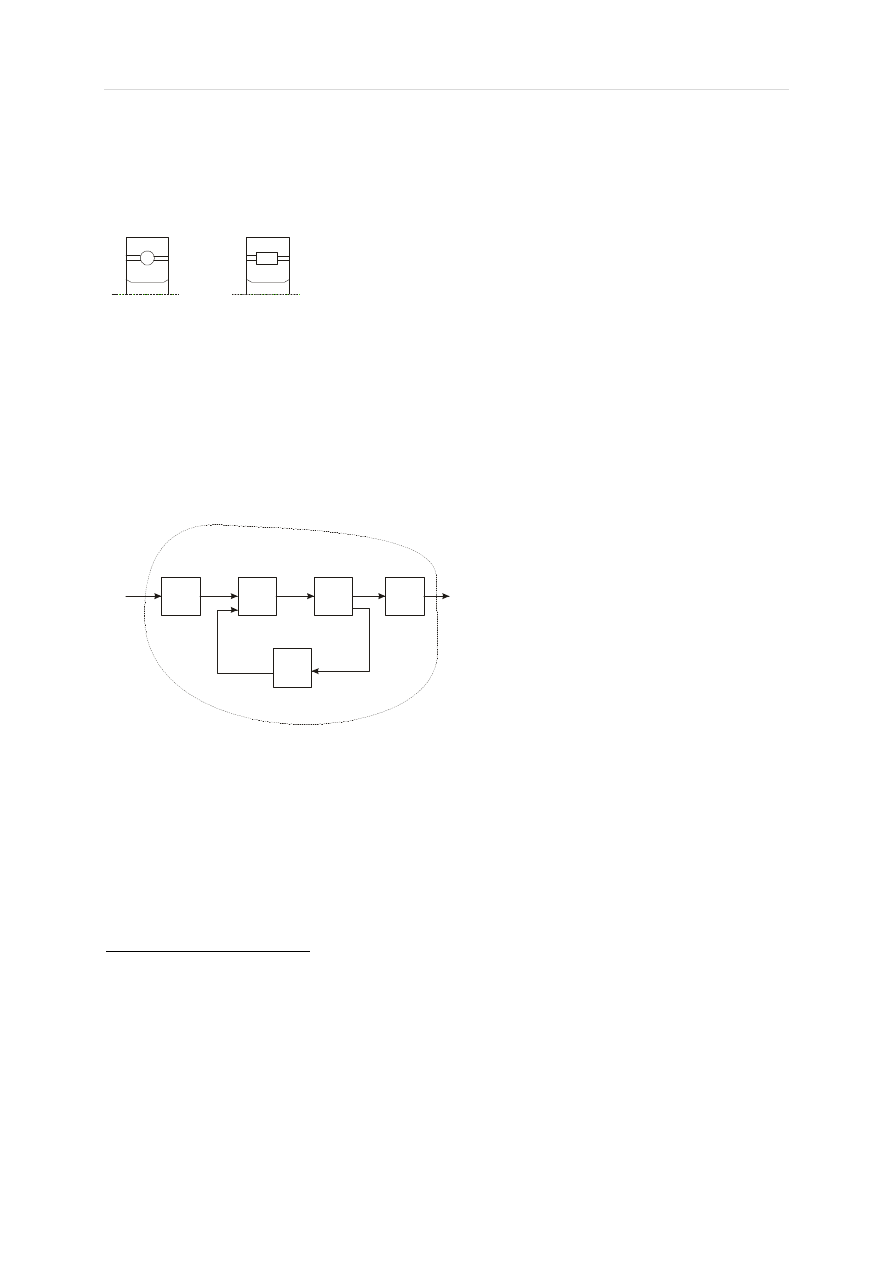
V. ŁOśYSKA
Łożyska są elementami których zadaniem jest podtrzymywanie obracających lub przesuwających się
wałów lub osi oraz przejęcie działających na nie obciążeń i przeniesienie ich na korpus lub fundament
urządzenia. Cechą charakterystyczną pracy łożysk są bardzo małe opory tarcia. Dzielimy je na
ś
lizgowe i toczne.
Łożyska ślizgowe mogą przenosić obciążenia poprzeczne (promieniowe) lub wzdłużne (osiowe) i
mogą być dostosowane do przenoszenia jednocześnie obciążeń wzdłużnych i poprzecznych. Ruch
względny czopa wału względem korpusu odbywa się w tych łożyskach zazwyczaj za pośrednictwem
panewki wykonanej z brązu lub stopów łożyskowych.
Łożyska toczne to takie w których powierzchnie czopa wału i gniazda łożyska nie stykają się
bezpośrednio ze sobą lecz za pośrednictwem elementów tocznych (kulek lub wałeczków) toczących
się między dwoma pierścieniami.
Łożyska dzielimy na kulkowe i wałeczkowe.
M a s z y n o z n a w s t w o
S t r o n a
| 10
P o l i t e c h n i k a P o z n a ń s k a
Wałeczkowe mogą być w kształcie:
- walców
- igiełek
- stożków
- baryłek
łożysko kulkowe
łożysko walcowe
Łożyska są elementami znormalizowanymi.
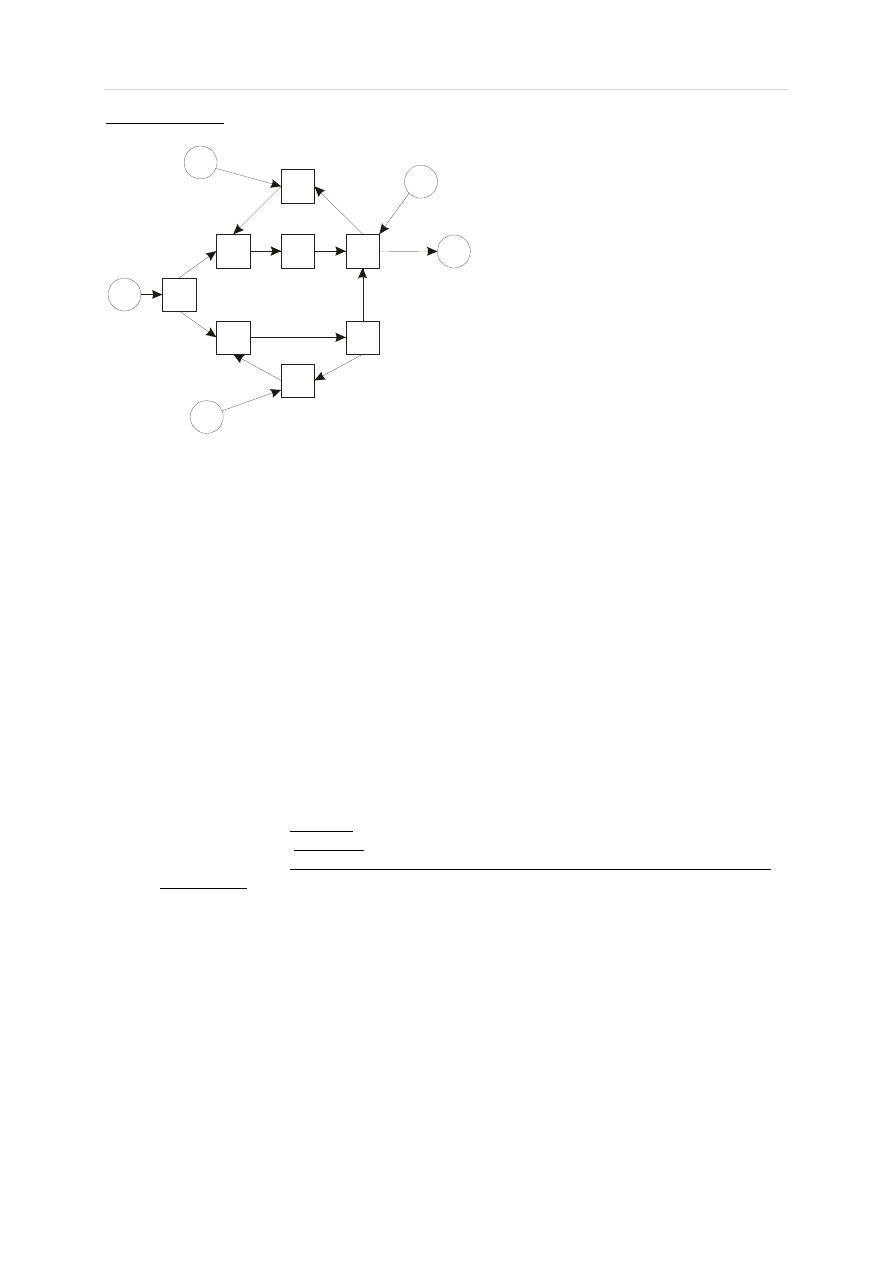
ZAPIS MASZYNY
Maszyna może być rozpatrywana jako system, to jest zbiór relacji sprzężeń i relacji przekształceń
dotyczących energii, masy i informacji (sterowania) który można przedstawić poglądowo schematem
blokowym jak również zapisać w postaci grafu zależności i powiązań.
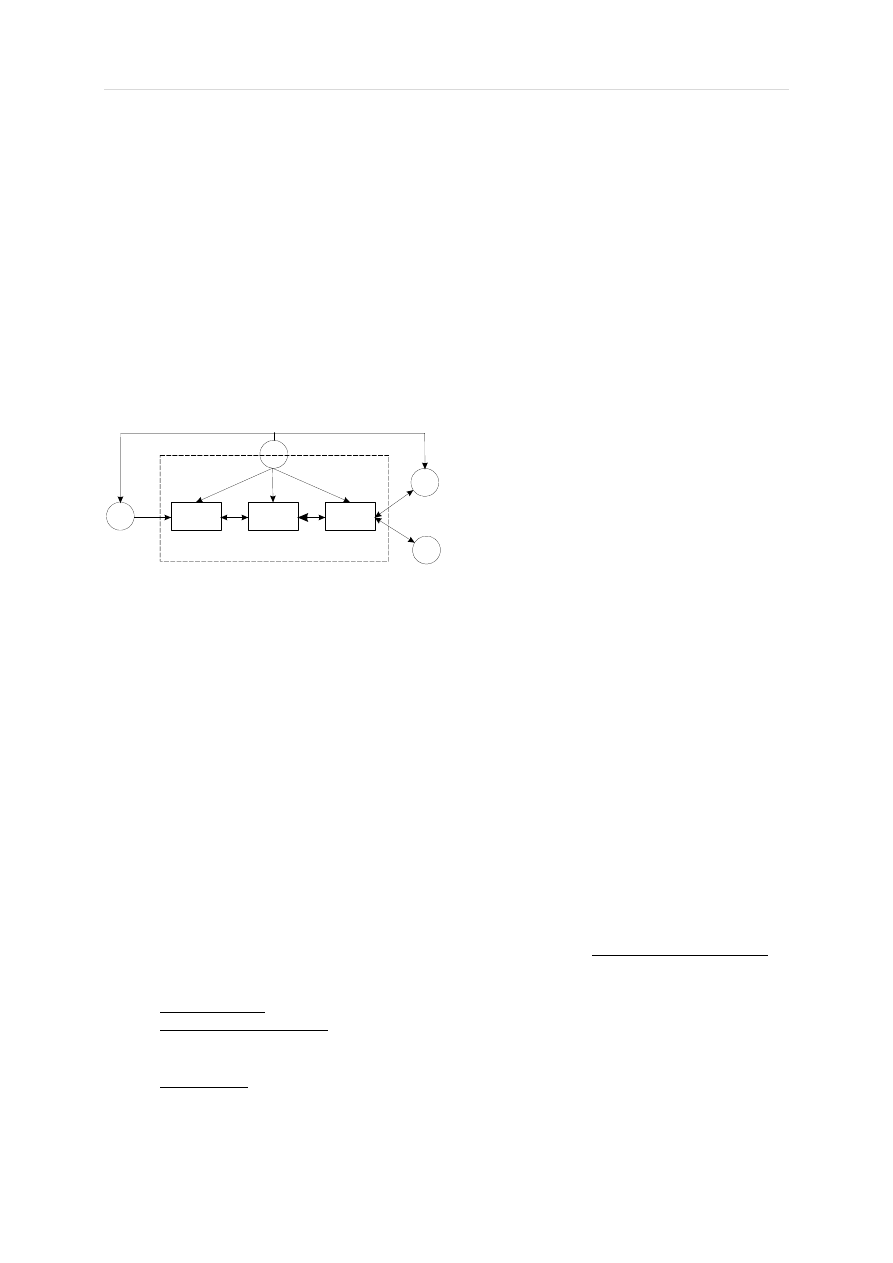
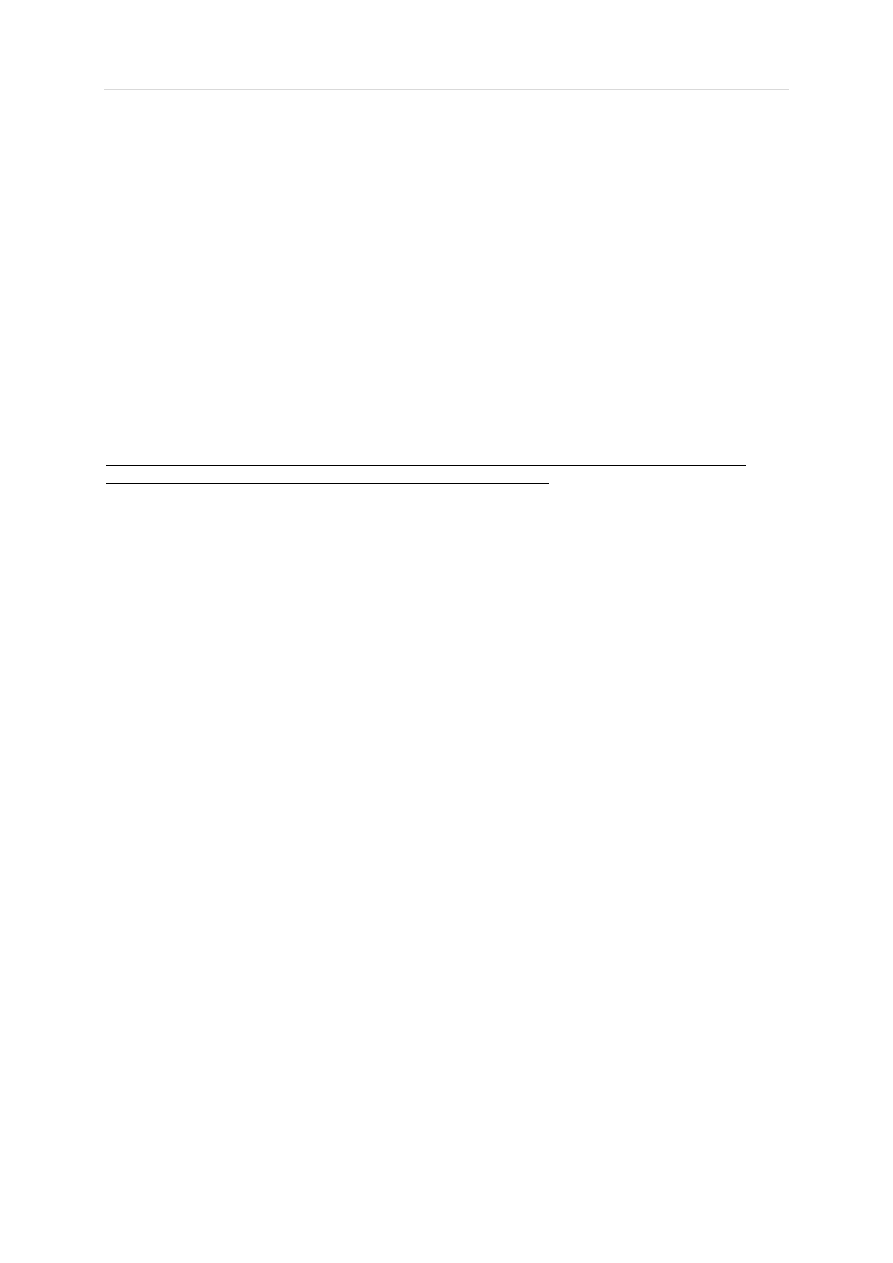
Schemat blokowy maszyny w ujęciu systemowym:
1
2
3
5
4
We
Wy
C
U
Schemat blokowy układu U stanowiącego część całego systemu C z wejściem We i wyjściem Wy.
Układ składa się z pięciu elementów o relacjach przekształceń stałych jak w elementach 1, 4, 5 lub o
relacjach uwarunkowanych jak w elementach 2 i 3. Oddziaływanie zwrotne elementu 3 na 2 jest
sprzężeniem zwrotnym charakterystycznym w układach regulacji automatycznej.
Graficzny zapis można przedstawić w postaci:
1. Schematycznego zarysu postaci
2. Modelu blokowego
3. Za pomocą grafu
1. Schematyczny zarys postaci.
(tutaj powinien być rysunek tej śmiesznej koparki z oznaczeniami podzespołów)
1 – silnik spalinowy
2 – transmisja obejmująca przekładnię hydrokinetyczną i skrzynię biegów
3 – podwozie z układem kół jezdnych
4 – pompa do układu hydrokinetycznego napędu i sterowania
5 – siłowniki hydrauliczne
6 – łyżka z wysięgnikiem
7 – kabina sterowania
7a – układ sterowania jazdą koparki
7b – układ sterowania łyżką ładowarki
M a s z y n o z n a w s t w o
S t r o n a
| 11
P o l i t e c h n i k a P o z n a ń s k a
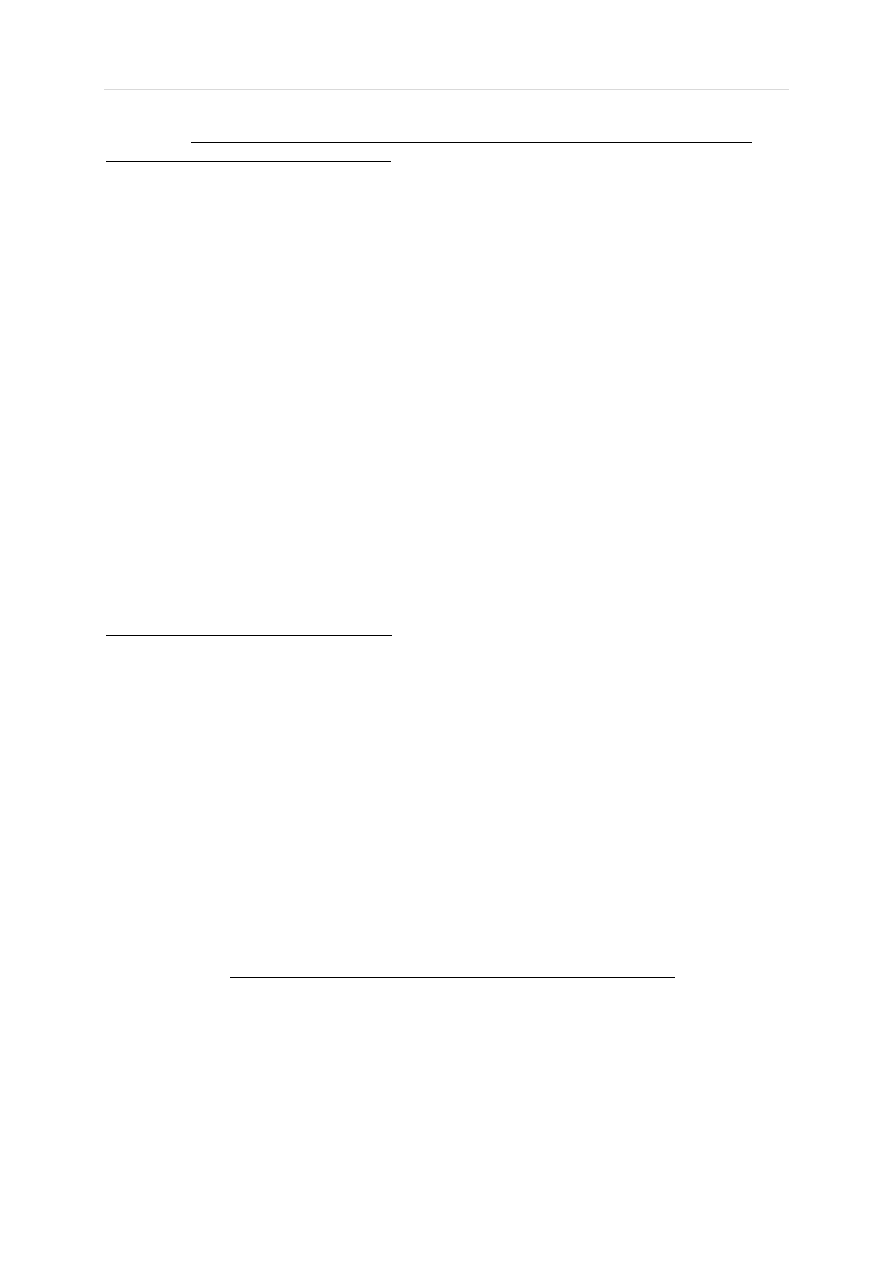
2. Model blokowy
7b
7a
1
2
3
4
5
6
M
U
I
I
E
1 – Zamiana energii chemicznej paliwa na mechaniczną silnika
2 – Zmiana parametrów energii mechanicznej silnika określonej przez moment i obroty (M
s
, n
s
)
3 – Zmiana ruchu obrotowego kół na ruch liniowy ładowarki
4 – Zmiana energii mechanicznej na energię potencjalną cieczy
5 – Zmiana energii potencjalnej cieczy na energię mechaniczną siłownika
6 – Nabieranie masy przeładunkowej na łyżkę, przemieszczanie masy i opróżnianie łyżki
7a – przetwarzanie informacji o oporach jazdy, sterowanie skrzynią biegów
7b – przetwarzanie informacji o oporach napełniania łyżki i sterowanie siłownikami hydraulicznymi,
NORMALIZACJA I UNIFIKACJA W BUDOWIE MASZYN
Normalizacja polega na racjonalnym wyborze , uporządkowaniu, uproszczeniu i ujednoliceniu pojęć,
nazewnictwa, wymiarów, kształtów, metod badawczych, obliczeniowych metod dokładności
wykonania.
Dążenie do obniżenia kosztów wymaga uporządkowania w przemyśle maszynowym normalizacji i
unifikacji.
Zadania normalizacji polegają na:
– ograniczeniu ilości kształtów,
– ograniczeniu ilości wymiarów
– ograniczeniu ilości materiałów elementów typowych występujących w różnych maszynach i
urządzeniach
(śruby, kołki, łożyska, uszczelki lub całe zespoły: sprzęgła, hamulce itp.).
Normalizacja obejmuje nie tylko elementy i zespoły maszyn ale również niektóre szczegóły
konstrukcyjne np.: średnice wałów, otworów, kształtów podtoczeń, wymiary gwintów, zbieżność
stożków oraz narzędzia do kontroli tych wymiarów.
Normalizacja daje następujące korzyści techniczno-ekonomiczne:
1. Ułatwia i przyspiesza proces konstruowania
2. Obniżenie kosztów własnych wytwarzania przez oszczędności surowcowe, uproszczenie
metod produkcji i zmniejszenie ilości potrzebnych narzędzi
3. Zmniejszenie asortymentu produkowanych i magazynowanych części
4. Ułatwia produkcję, eksploatację i remont maszyn
5. Umożliwia budowę maszyn w oparciu o standardowe zespoły i podzespoły
6. Stwarza możliwości szeroko pojętej specjalizacji produkcji.
7. Ułatwia rozwój nauki i piśmiennictwa naukowego
M a s z y n o z n a w s t w o
S t r o n a
| 12
P o l i t e c h n i k a P o z n a ń s k a
PN – polskie normy
BM – branżowe normy
ZN – zakładowe normy
Unifikacja ma charakter mniej ogólny niż normalizacja i dotyczy zagadnień technicznych nie
objętych normami. Unifikacja obejmuje przede wszystkim powszechnie stosowane zespoły a nawet
całe maszyny tworząc określone typoszeregi o ściśle określonych parametrach technicznych. Jednym z
ważniejszych skutków normalizacji i unifikacji jest osiągnięcie zamienności, tzn. zapewnienie
elementom lub zespołom wzajemnego ich zastępowania bez naruszenia funkcjonalności danej
maszyny.
Kierunki normalizacji w budowie maszyn:
1. Normalizowanie teoretycznych, podstawowych wielkości w budowie maszyn (tolerancje i
pasowania, zarysy zębów kół zębatych, zarysu gwintu itp.)
2. Normalizowanie metod i sposobów obliczeń funkcjonalnych i wytrzymałościowych
3. Normalizowanie materiałów konstrukcyjnych, dotyczy sposobów wytwarzania i warunków
odbioru technicznego
4. Normalizacja powierzchni stosowanych w elementach maszynowych
5. Normalizowanie metod wytwarzania elementów maszyn
6. Normalizowanie warunków dostawy i odbioru technicznego maszyn i urządzeń
7. Normalizowanie sposobów i warunków przeprowadzania prób i badań
8. Normalizowanie podstawowych jednostek miary (np. układ SI)
9. Normalizowanie symboli, nazewnictwa, pojęć, oznaczeń technicznych i rysunku technicznego
Rzeczywiste wymiary odbiegają od tzw. wymiarów nominalnych w zależności od dokładności
obróbki i są zmiennymi losowymi. Dokładność wykonania ma wpływ na prawidłowość montażu i
jakość współpracy. Zapewnienie właściwej współpracy uzyskamy przez wykonanie części maszyn w
określonych granicach wymiarowych co odbywa się przez tolerowanie. Różnice dopuszczalnych
wartości tolerowanego parametru nazywa się tolerancją. Obszar w którym może się zmieniać wartość
tolerowanego parametru nazywa się polem tolerancji. Tolerowanie geometryczne wiąże ze sobą
proces myślowy i konstrukcyjny z procesem fizycznym związanym z obróbką. Tolerowanie
geometryczne warunkuje jednoznaczną i obiektywną kontrolę jakości. Na podstawie znajomości
tolerancji geometrycznej można dobierać odpowiednie metody kontroli i narzędzia kontrolno
pomiarowe.
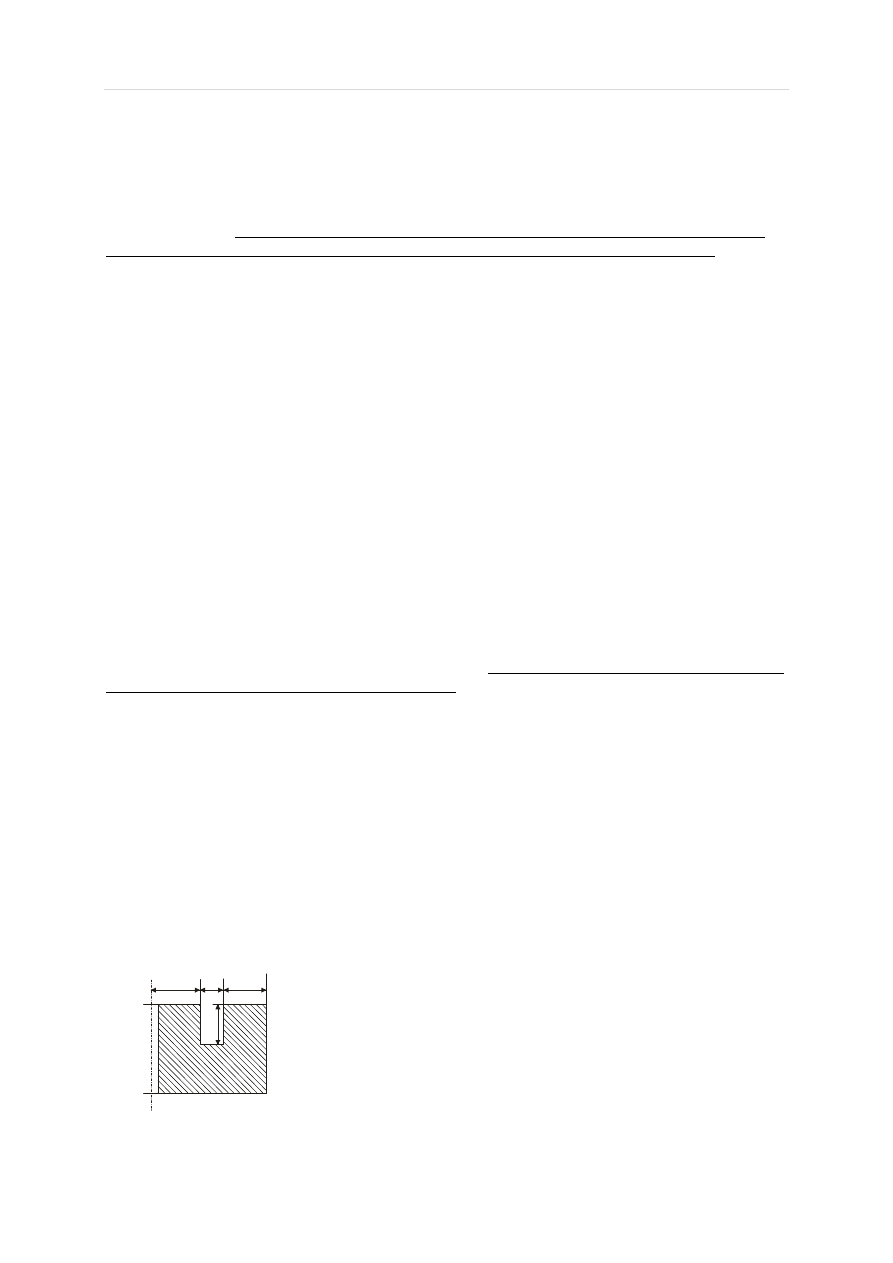
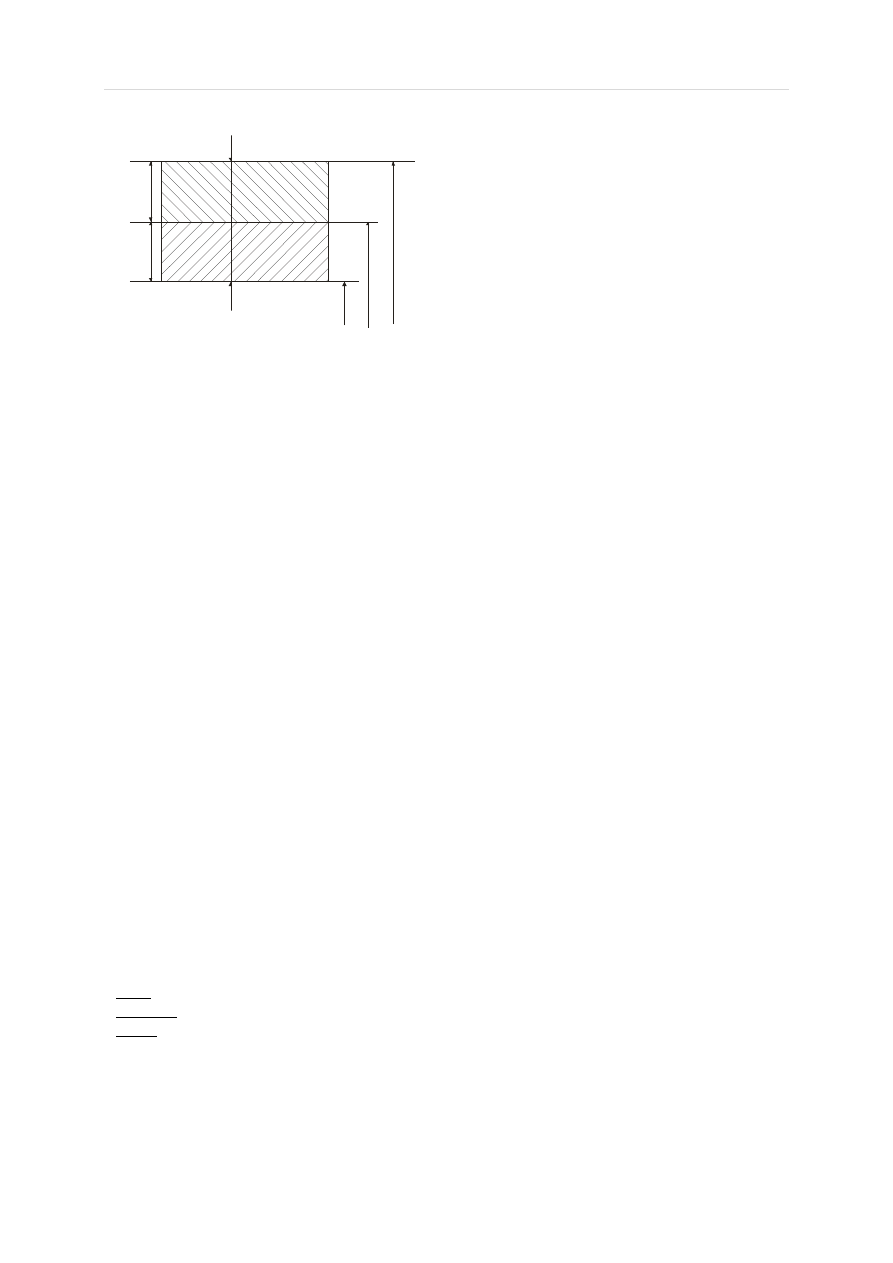
Tolerowanie geometryczne wymiarów:
Przez wymiar rozumie się wartość długości lub kąta wyrażony w określonych jednostkach.
Rozróżniamy cztery typy wymiarów:
- zewnętrzny (c)
- wewnętrzny (d)
- mieszany (h)
- pośredni (l)
h
l
d
c
M a s z y n o z n a w s t w o
S t r o n a
| 13
P o l i t e c h n i k a P o z n a ń s k a
Pola tolerancji:
linia
zerowa
e
s
e
i
B
N
A
T
Pola tolerancji wyznaczają następujące wymiary:
- wymiar nominalny N
- odchyłki górna i dolne (e
s
i e
i
)
- wymiary graniczne (A i B)
B = N + e
s
A = N + e
i
bo N – A = -e
i
- tolerancja T
T = e
s
- e
i
= B-A
e
s
= B – N
e
i
= A – N
N
ei
es
→ 50
+0,1
+0,2
Rodzaj tolerancji:
1. Tolerowanie symetryczne
50
-0,1
+0,1
2. Tolerowanie asymetryczne
a. tolerowanie na plus
49,9
+0,2
b. tolerowanie na minus
50
-0,2
3. Tolerowanie asymetryczne dwustronne
50
-0,2
+0,1
4. Tolerowanie asymetryczne jednostronne
50
+0,2
+0,1
50
+0,1
-0,2
Tolerowanie swobodne jest tolerowaniem którego odchyłki są dobierane według uznania
konstruktora. Tolerowanie normalne występuje gdy odchyłki są zgodne z normami tolerancji.
Φ70H7
70 – wymiar nominalny
H – symbol położenia pola tolerancji względem osi zerowej. Duże litery dotyczą tolerowania otworu, małe wałka.
7 – klasa dokładności wykonania. Jest 19 klas: 01, 0, 1, 2, 3, ... , 17
Rozróżniamy pasowania:
- luźne – pole tolerancji otworu leży powyżej pola tolerancji wałka (L
min
i L
max
– luzy graniczne)
- mieszane – pola tolerancji częściowo pokrywają się w L
max
i W
max
(wcisk maksymalny)
- ciasne – pole tolerancji wałka leży powyżej pola tolerancji otworu (W
min
i W
max
– wciski graniczne)
M a s z y n o z n a w s t w o
S t r o n a
| 14
P o l i t e c h n i k a P o z n a ń s k a
Położenie pól tolerancji:
D
E
F
G
H
K M
P
T
U
otwór
luźne
mieszane
ciasne
d
e
f
g
h
k
m
p
t
u
wałek
luźne
mieszane
ciasne
PRZEGLĄD MATERIAŁÓW UśYWANYCH W BUDOWIE MASZYN
Koniecznym warunkiem dobrej pracy konstrukcji jest znajomość materiałów konstrukcyjnych, ich
własności, wpływu warunków pracy na te własności i sposób wykonania elementu z danego materiału.
Dobór materiału opiera się na następujących przesłankach:
1. Eksploatacyjnych, podyktowanych warunkami pracy konstrukcji,
np. przeznaczenie, rodzaj i
charakter obciążeń, trwałość, itp.
2.
Technologicznych
np. możliwości wytwarzania, sposób obróbki, liczba produkowanych elementów
3. Ekonomicznych, ogólnie koszty materiałów i wytwarzania elementów
Przy doborze materiałów korzysta się z norm materiałowych. Normy materiałowe materiałów
metalowych podają (np. dla stali) rodzaj i gatunek stali, obowiązujące oznaczenie, skład chemiczny,
własności mechaniczne i technologiczne, obróbką cieplną i niektóre własności specjalne.
Stal jest to stop żelaza z węglem o zawartości C do 2%.
Stale dzielimy na węglowe i stopowe (według składu chemicznego)
Stale węglowe konstrukcyjne dzielimy na:
1. Stale węglowe konstrukcyjne zwykłej jakości, ogólnego przeznaczenia
2. Stale węglowe konstrukcyjne wyższej jakości. Są to stale o określonych własnościach
mechanicznych jak i składzie chemicznym.
3. Stale węglowe konstrukcyjne o określonym przeznaczeniu i szczególnych własnościach, np.
łańcuchy górnicze, mosty, kadłuby statków, kotły parowe.
Stale stopowe otrzymujemy przez dodanie przez dodanie odpowiednich składników a zawartość tych
składników przekracza wartości określone dla stali węglowych.
Staliwa – jest to stal lana czyli lejny stop żelaza z zawartością C do 2% i z innymi składnikami
stopowymi. Dzielimy je na stopowe i węglowe.
śeliwa – jest to stop żelaza z węglem o zawartości C powyżej 2% oraz innymi pierwiastkami jak
krzem, mangan, siarka i fosfor.
Stopy metali nieżelaznych:
1. Miedź i stopy miedzi – najczęściej stosowanymi w budowie maszyn stopami miedzi są
mosiądz i brąz. Mosiądz to stop miedzi z cynkiem o zawartości Zn do 50%. Brązy są to stopy
miedzi z innymi składnikami stopowymi oprócz cynku.
2. Aluminium i jego stopy.
3. Ołów i jego stopy np. łożyska cynkowe z cyny i ołowiu.
4. Cynk i jego stopy.
M a s z y n o z n a w s t w o
S t r o n a
| 15
P o l i t e c h n i k a P o z n a ń s k a
Materiały niemetalowe:
Do materiałów konstrukcyjnych niemetalowych zalicza się przede wszystkim tworzywa sztuczne,
gumę, drewno, beton i porcelanę.
Tworzywa dzielimy na:
a) termoplastyczne – przy podgrzewaniu do temperatury 150-200°C stają się plastyczne i dają się
formować a po ostygnięciu sztywnieją, przy czym proces ten jest powtarzalny, np. PCV,
teflon, poliamidy.
b) termoutwardzalne – stają się plastyczne po ogrzaniu do temperatury 180-220°C tylko jeden
raz. Po ostygnięciu są już nieodwracalnie sztywne i utwardzone np. żywice epoksydowe,
poliestry, tworzywa fenolowe itp.
PODSTAWOWE ZAGADNIENIA EKSPLOATACJI MASZYN
Eksploatacją nazywa się zespół czynności których celem jest racjonalizacja użytkowania maszyn i
urządzeń.
Eksploatacja dzieli się na następujące etapy:
1. Użytkowanie – jest to etap eksploatacji w czasie którego odbywa się praca sprawnej maszyny
oraz bieżąca kontrola jego stanu technicznego.
2. Obsługiwanie - jest to zespół działań które są wykonywane pomiędzy użytkowania maszyny
w celu zachowania jej pełnej sprawności. Zaliczamy tu między innymi obsługę techniczną i
naprawy bieżące.
3. Przechowywanie – jest to oczekiwanie, najczęściej w magazynie maszyn na przekazanie ich
do użytkowania, obsługi czy naprawy.
RODZAJE ZUśYCIA MASZYN I URZĄDZEŃ
Prawidłowe działanie maszyny ocenia się na podstawie jej charakterystyki roboczej. Wszelkie
odchylenia charakterystyk świadczą o nieprawidłowościach spowodowanych złą regulacją lub
zużyciem.
Każda maszyna składa się z wielu połączeń ruchomych i spoczynkowych. W wyniku zmian w tych
połączeniach następują zmiany ich charakterystyk.
Na intensywność zużywania się połączeń części maszyn mają wpływ następujące czynniki:
a) konstrukcja części i zespołów
b) jakość użytych materiałów oraz jakość obróbki
c) dobór pasowań
d) rodzaj stosowanych olejów i smarów
Zużycie jest procesem w czasie którego pogarsza się stan techniczny urządzenia. Naturalne zużycie
dzieli się na mechaniczne i chemiczne.
Zużycie mechaniczne – występuje przede wszystkim na skutek tarcia pomiędzy współpracującymi
między sobą powierzchniami części.
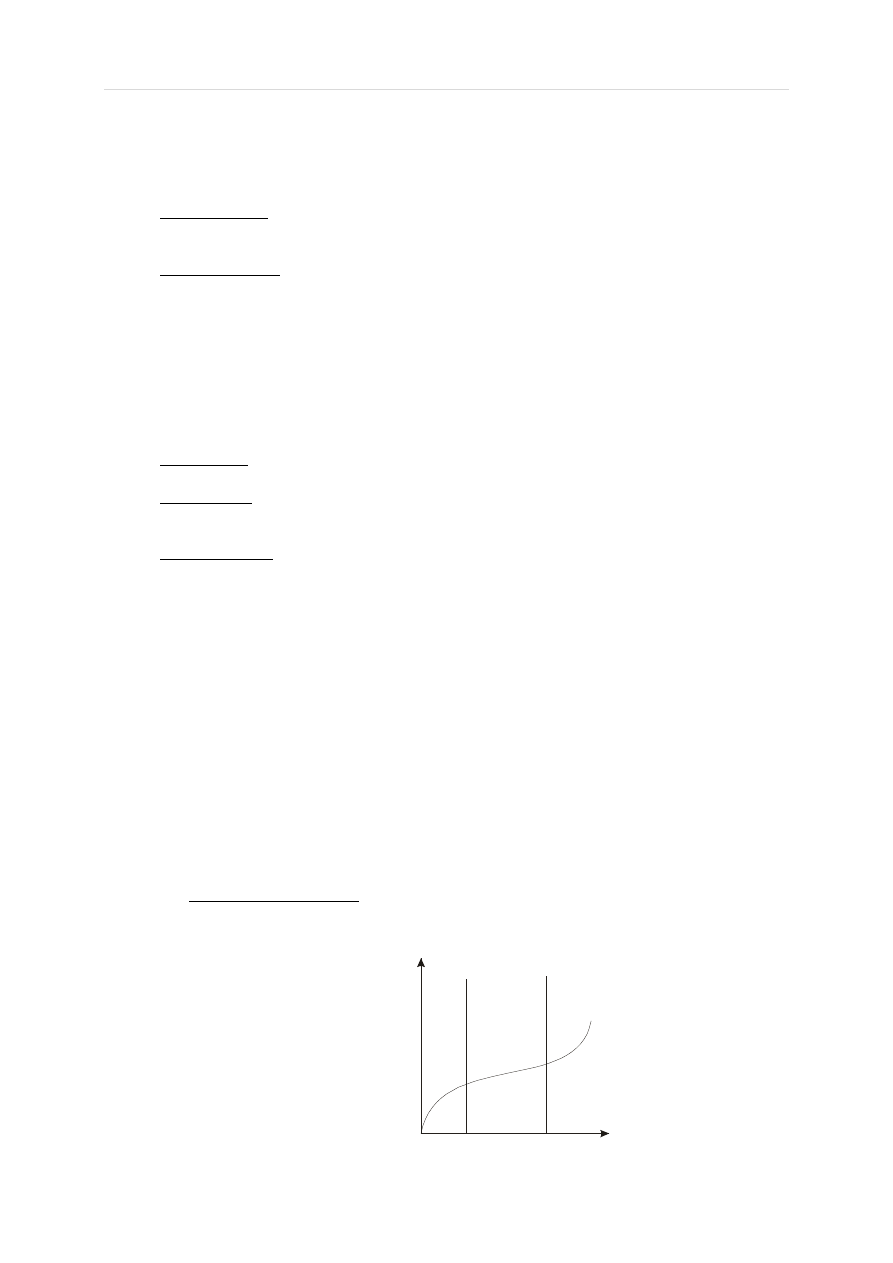
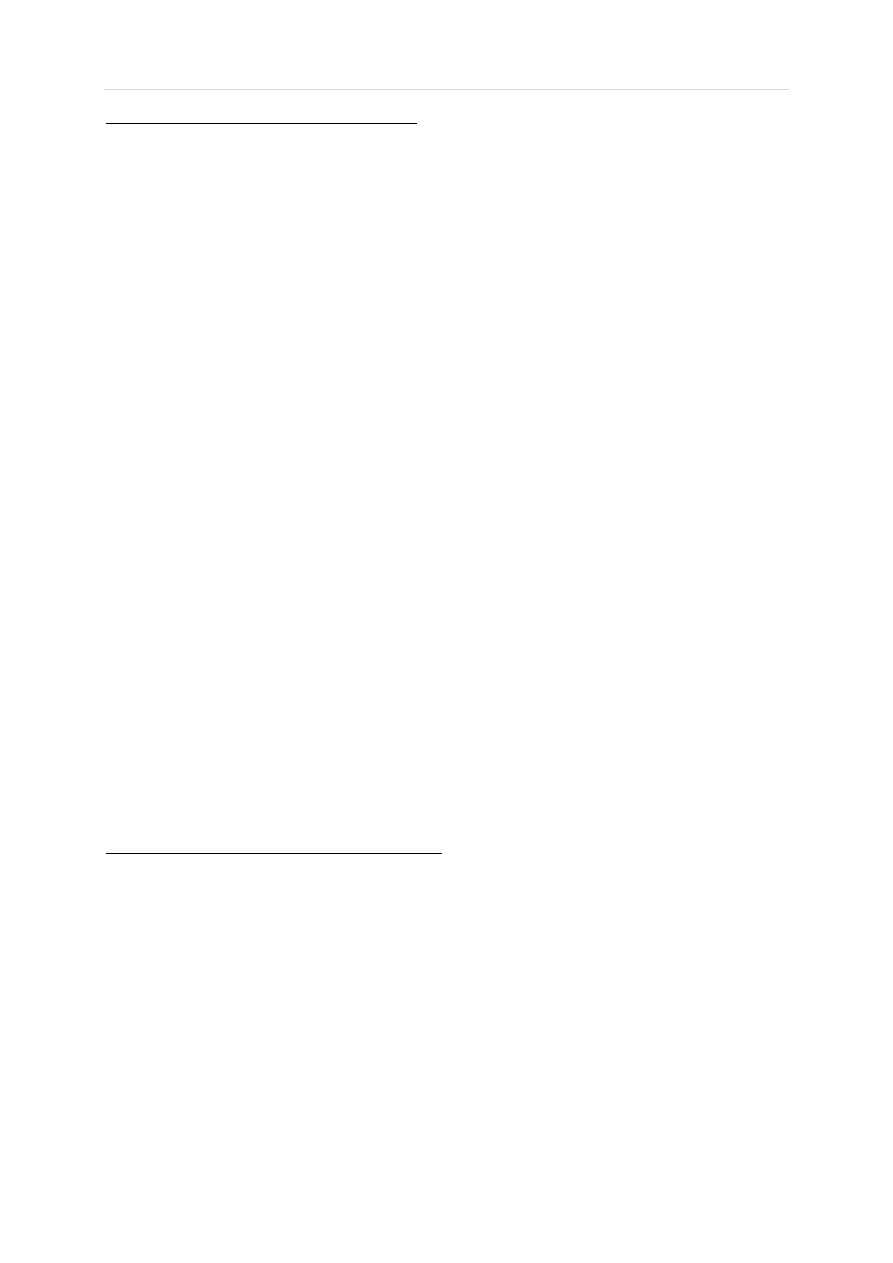
Krzywa zużycia od czasu eksploatacji:
szybkość
zużycia
docieranie zużycie normalne
zużycie
przyspieszone
czas
eksploatacji
M a s z y n o z n a w s t w o
S t r o n a
| 16
P o l i t e c h n i k a P o z n a ń s k a
Zużycie chemiczne – polega na zmianach w strukturze powierzchni współpracujących części
powstających w wyniku korodującego działania kwasów zawartych w olejach i smarach oraz wpływu
ś
rodowiska.
Korozję mogą powodować czynniki chemiczne lub elektrochemiczne.
Korozja chemiczna metalu jest to proces niszczenia wywołany bezpośrednio wpływem na metal
suchych gazów lub środowisk ciekłych nie przewodzących prądu elektrycznego.
Korozja elektrochemiczne – zachodzi w skutek przepływu prądu elektrycznego między częściami
metalowymi w roztworze wody i kwasów.
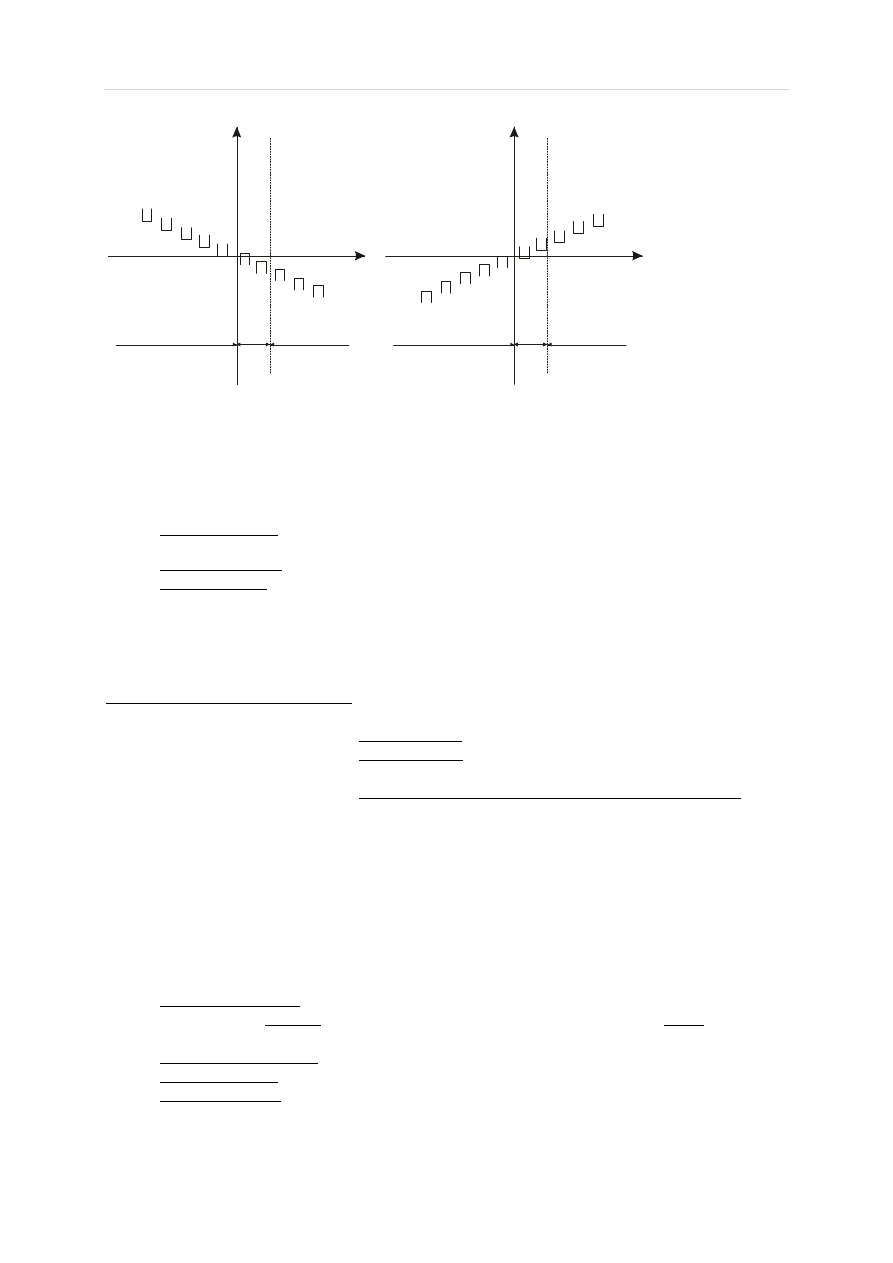
Zużycie zmęczeniowe
– pojawia się w wyniku obciążeń zmiennych (jednostronnie lub dwustronnie)
czas
obciążenia
czas
obciążenia
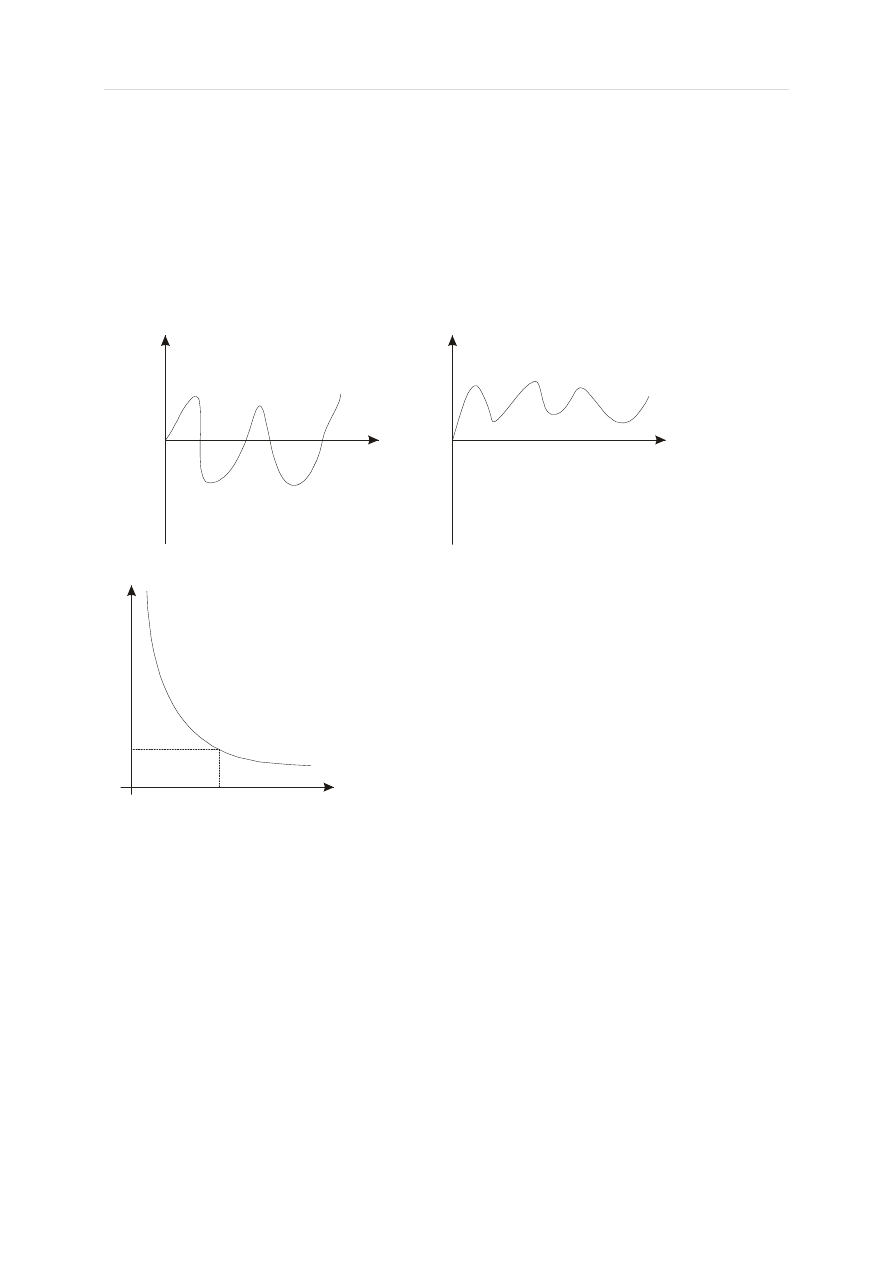
Krzywa Wo:hlera:
liczba cykli
o
b
c
ią
ż
e
n
ia
o
gran
n
gran
SMAROWANIE
Smarowanie – zmniejsza straty energii na pokonywanie tarcia i zapobiega wczesnemu zużyciu części.
Wprowadzenie pomiędzy współpracujące powierzchnie cieczy smarnej o bardzo małym tarciu
wewnętrznym ma na celu zmniejszenie współczynnika tarcia.
Po za tym smarowanie spełnia również inne zadania:
1. częściowe zabezpieczenie przed korozją części metalowych
2. chłodzenie części przez odprowadzenie ciepła z pomiędzy współpracujących części
3. przyspieszenie procesu docierania
4. odprowadzenie z obszaru współpracy części zużytych mikrocząstek materiału
W zależności od rodzaju, metody powstawania warstwy smarnej rozróżnia się smarowanie
hydrostatyczne i hydrodynamiczne. Smarowanie hydrostatyczne występuje wtedy gdy ciecz
smarująca jest dostarczana do obszaru między współpracującymi powierzchniami pod ciśnieniem
zapewniającym określoną siłę wyporu. Smarowanie hydrodynamiczne występuje wtedy gdy
warstwa cieczy smarnej wnika między współpracujące elementy w wyniku ich ruchu względnego
M a s z y n o z n a w s t w o
S t r o n a
| 17
P o l i t e c h n i k a P o z n a ń s k a
tworząc tak zwany klin smarowy. Do smarowania maszyn i urządzeń stosuje się oleje maszynowe i
smary stałe.
Występują dwa podstawowe układy smarowania:
– indywidualny
Przy smarowaniu indywidualnym każdy punkt smarowania ma własny zbiornik napełniany
okresowo.
– centralny
Smarowanie centralne polega na tym, że wiele punktów jest zasilanych ze wspólnego
zbiornika.
DIAGNOSTYKA TECHNICZNA
Jest to metoda określania stanu technicznego maszyny lub urządzenia z lokalizacją ewentualnych
niedomagań bez demontażu maszyny. Obejmuje ona m. in. obserwacją i rejestrację zewnętrznych
objawów towarzyszących procesom chemicznym, analizę i ocenę rejestrowanych danych oraz
stawianie diagnozy. W wyniku badania otrzymuje się informację o wewnętrznych cechach maszyny
których cechy chcemy określić, chociaż części są zazwyczaj niedostępne do bezpośredniego badania.
Trwałość i niezawodność:
Przez trwałość maszyn i urządzeń rozumiemy własność która charakteryzuje proces ich zużywania się
podczas eksploatacji.
Przez niezawodność rozumie się zdolność urządzenia do bezawaryjnej pracy.
Kryteriami określającymi niezawodność urządzeń i maszyn są:
– duża trwałość
– pewność działania
– bezawaryjność
– zdolność do długotrwałej pracy bez pogarszania parametrów wyjściowych
– mały zakres i łatwość obsługi
– długie okresy międzynaprawcze
– mała pracochłonność napraw i obsługi
Trwałość i niezawodność zależą od rozwiązania konstrukcyjnego, jakości wykonania i warunków
użytkowania.
Jako wskaźnik trwałości można przyjąć:
1. Czas pracy określony w godzinach lub latach aż do całkowitego zużycia
2. Czas użytkowania – czas pracy aż do całkowitego zużycia bez uwzględniania przestojów
Wskaźnik niezawodności urządzenia jest to prawdopodobny średni czas bezzakłuceniowej pracy.
M a s z y n o z n a w s t w o
S t r o n a
| 18
P o l i t e c h n i k a P o z n a ń s k a
SILNIKI WIATROWE
Silniki wiatrowe są to silniki które wykorzystują energię kinetyczną poruszającego się powietrza
atmosferycznego i zmieniają ją na inny rodzaj energii np. na pracę.
Koło wiatraka (1) składa się z pewnej liczby skrzydeł umieszczonych na poziomym wale (2). Wał
obraca się w łożyskach umieszczonych w obudowie (3). W obudowie mieści się przekładnia zębata
przenosząca ruch wału poziomego na wał pionowy. Wał ten napędza maszynę roboczą, którą
najczęściej jest prądnica. Razem z wałem i kołem wiatraka zamontowany jest ster kierunkowy.
W strumieniu powietrza atmosferycznego poruszającego się z prędkością v umieszczamy płytkę na
którą działać będzie siła aerodynamiczna. Strumień powietrza opływającego płytkę z pewną
prędkością powoduje zwiększenie ciśnienia powietrza na powierzchni górnej. Różnica ciśnień jest
przyczyną powstania siły aerodynamicznej skierowanej ku górze, których wypadkową jest siła W. Siłę
W rozkładamy na składową Z prostopadłą do prędkości v zwaną siłą nośną oraz na składową X zwaną
oporem czołowym.
Siły aerodynamiczne oblicza się z następujących wzorów:
X = C
x
* F * (v
2
)/
2
kg
Z = C
y
* F * (g*v
2
)/
2
kg
F – powierzchnia płytki
g – gęstość powietrza
C
x
– współczynnik oporu
C
y
– współczynnik siły nośnej
v – prędkość powietrza
Wartości tych sił będą zależne od kąta natarcia łopatek wirnika (α)
M a s z y n o z n a w s t w o
S t r o n a
| 19
P o l i t e c h n i k a P o z n a ń s k a
Powietrze przepływające przez pole skrzydeł wiatraka wykonuje pewną pracę równą jego energii
kinetycznej. Stosunek energii kinetycznej wykorzystanej w wiatraku do pełnej energii nazywa się
współczynnikiem wykorzystania wiatraków
__ psi. Współczynnik ten wynosi od 0,3 do 0,6.
Moc wiatraka można obliczyć z zależności
N=(v
3
D
2
)/
1530
KM
Rozróżniamy wiatraki wolnobieżne o dużej liczbie skrzydeł (do 24) wypełniających prawie całą
powierzchnię koła i szybkobieżne. Wiatraki szybkobieżne charakteryzują się małą liczbą ramion (2-4).
Miarą szybkobieżności jest tzw. moduł wiatraka:
Jest to stosunek prędkości obrotowej końca skrzydła do prędkości wiatru. Moment jaki uzyskuje się
zależy od modułu. Do oceny pracy wiatraków wykorzystuje się moment bezwymiarowy __.
Wartość __ wyznaczamy z zależności
M – moment silnika wiatrowego
energia strugi wiatru –
Pomiędzy tymi momentami obowiązuje zależność
Charakterystyki aerodynamiczne wiatraka:
TURBINY WODNE
Turbiny wodne są to maszyny które przetwarzają energię wody na pracę mechaniczną, a więc należą
do grupy silników. Aby uzyskać energię, woda musi być spiętrzona w sposób naturalny lub sztuczny.
Podstawowym elementem każdej turbiny jest obracający się wirnik zaopatrzony w łopatki.
Rozróżniamy turbiny akcyjne i reakcyjne.
W turbinie akcyjnej Energia potencjalna spiętrzonej wody w całości przekształca się w energię
kinetyczną jeszcze przed wirnikiem w nieruchomej dyszy lub kierownicy. Ruch obrotowy wirnika
uzyskuje się w skutek naporu strugi na jego łopatki. Ciśnienie wody przed i za wirnikiem jest
jednakowe i równe atmosferycznemu. Wzdłuż łopatek wirnika woda przepływa ruchem jednostajnym.

M a s z y n o z n a w s t w o
S t r o n a
| 20
P o l i t e c h n i k a P o z n a ń s k a
W turbinie reakcyjnej tylko część energii potencjalnej spiętrzonej wody przekształca się w
nieruchomej kierownicy przed wirnikiem w energię kinetyczną strugi. Pozostała część zamienia się w
energię kinetyczną dopiero na łopatkach wirnika. Kanały między łopatkami wirnika zwężają się w
kierunku przepływu cieczy (wody) więc prędkość strugi zwiększa się a ciśnienie maleje. Pracę wirnika
turbiny reakcyjnej zawdzięcza się przede wszystkim dzięki działaniu reakcji hydrodynamicznej strugi
na łopatkach wirnika.
Ciśnienie wody przy wejściu na łopatki wirnika jest większe od ciśnienia atmosferycznego i maleje
przy przepływie.
Moc użyteczna P
u
turbiny wodnej oddawana jej wale:
P
u
– moc użyteczna
n
0
– sprawność ogólna turbiny
__ – gęstość cieczy (wody = 1000
kg
/
m3
)
Q – strumień objętości cieczy przepływającej przez turbinę (
m3
/
s
)
H – różnica poziomów wody zwanej spadem
g – przyspieszenie ziemskie
Moc największych turbin P
u
osiąga wartości 500 MW.
Przepływalność Q przekracza wartość 1000
m3
/
s
(strumień objętości cieczy przepływającej przez turbinę)
.
Wykorzystywane spady wody H: 1,5 – 2300 m.
Osiągane sprawności n: 0,8 – 0,94
Schemat turbiny Peltona (akcyjnej):
Turbina składa się z obrotowego wirnika (1) i z kierownicy strumienia wody (dysza z iglicą – 2). W
kierownicy następuje przekształcenia całego spadu na energię kinetyczną przekazywana na łopatki
wirnika. Kierownica ma kształt dyszy i jest umieszczona możliwie blisko łopatek wirnika i jest
nieruchoma. Przekrój wylotu dyszy można regulować za pomocą osiowego przesuwu iglicy i tym
samym regulować natężenie wypływu wody. Przy poziomej osi wirnika stosuje się zwykle 2 dysze.
Sprawność tych turbin wynosi 90%.
Prędkość obrotowa wirnika turbiny wynosi 750-1600
obr
/
min
Ś
rednica wirnika wynosi od 0,2 – 4 m
Osiągana moc tej turbiny to 30MW
M a s z y n o z n a w s t w o
S t r o n a
| 21
P o l i t e c h n i k a P o z n a ń s k a
Schemat turbiny Francisa w komorze otwartej:
(rura ssawna wytwarza podciśnienie u wylotu z wirnika i umożliwia uzyskanie części spadu odpowiadającego odległości
wirnika od zwierciadła wody w kanale dopływowym ale ponad to gwarantuje odzyskanie części energii kinetycznej wody
opuszczającej wirnik)
W turbinie reakcyjnej o dopływie promieniowym, dośrodkowym woda przepływa przez kierownicę
(1) o nastawnych łopatkach i zasila na całym obwodzie wirnik (2) przepływając przez kanały
międzyłopatkowe wirnika i uchodzi przez rurę ssącą (3). Przepływając przez odpowiedni
ukształtowane łopatki kierownicy struga wody nabiera prędkości w skutek częściowego spadku
ciśnienia. Pozostała część energii ciśnienia zostaje w wirniku bezpośrednio przekształcona na pracę
skutek siły reakcji hydrodynamicznych.
Współczesna technika zmierza do konstruowania turbin:
– dużej mocy
– pracujących nawet przy małych spadkach przy dużej przepływności (natężenie przepływu
przez wnętrze turbiny
– pozwalające na uzyskanie stosunkowo dużej prędkości obrotowej
Te wymogi spełniają turbiny szybkobieżne
Turbiny wodne stosowane są w elektrowniach wodnych gdzie wytwarzana energia mechaniczna
wykorzystywana jest do napędu generatorów i zamieniana w energię elektryczną.
Przykład turbiny szybkobieżnej (turbina Kaplana):
Sprawność do 93%
Ś
rednica wirnika od 1 do 10 m.
Moc użyteczna = 200MW
Przepływność Q = 500
m3
/
s
M a s z y n o z n a w s t w o
S t r o n a
| 22
P o l i t e c h n i k a P o z n a ń s k a
Charakterystyka turbin:
Wirnik turbiny wodnej reakcyjnej obraca się dookoła osi O z prędkością kątową __. Linia 1-2
przedstawia zarys łopatki wirnika. Cząstki cieczy przepływają do wirnika przez prowadnicę walcową
o promieniu r
1
z prędkością bezwzględną c
1
i wpływają przez powierzchnię walcową o promieniu r
2
z
prędkością c
2
. Prędkości c
1
i c
2
rozkładamy na prędkości unoszenia u
1
i u
2
i prędkości względne w
1
i
w
2
. Kąty zawarte między prędkością bezwzględną oznaczamy jako __ i __. Kąty zawarte między
prędkościami względnymi a ujemnymi wektorami prędkości unoszenia B
1
i B
2
. Składowe obwodowe
oznaczamy przez Cu
1
i Cu
2
a składowe prędkości względnych przez Wu
1
i Wu
2
. Całkowity moment
obrotowy jaki płynący strumień wytwarza między ściankami łopatek jest równy zmianie momentu
ilości ruchu w jednostce czasu wywołanej zmianą składowej prędkości Cu
1
i Cu
2
.
Wartość tego momentu:
Moc reakcji hydrodynamicznej strumienia przepływającego przez wirnik a zatem moc
przekazywana turbinie przez wodę wynosi:
Wprowadzając prędkość obrotową u
1
= r
1
__, u
2
= r
2
__ otrzymujemy wzór na moc w postaci:
c
1*
u
1*
cos__ - c
2
*u
2
*cos__ = __*g*H
M a s z y n o z n a w s t w o
S t r o n a
| 23
P o l i t e c h n i k a P o z n a ń s k a
POMPY
Pompą nazywamy maszynę roboczą która kosztem energii silnika przenosi ciecz z poziomu niższego
na wyższy. Działanie pompy opiera się na wytwarzaniu różnicy ciśnień między przestrzenią ssącą a
tłoczącą za pomocą ruchomego elementu roboczego.
Pompy objętościowe są to takie pompy których działanie polega na przetłaczaniu dawki cieczy z
przestrzeni ssawnej przez odpowiedni ruch elementu roboczego do przestrzeni tłocznej.
Pompy przepływowe są to takie pompy których działanie polega na wykorzystaniu warunków
ciągłego i równomiernego przepływu cieczy przez przestrzeń wewnętrzną pompy.
Zależnie od warunków pracy pompy dzielimy na ssące, tłoczące i ssąco-tłoczące.
Pompy objętościowe charakteryzują się wyrównanym ciśnieniem które działa na ruchomy element
roboczy. Zależy ono jedynie od położenia tłoka zamykającego przestrzeń roboczą i odpowiadającemu
temu położeniu objętości czynnika roboczego.
Działanie pomp objętościowych opiera się na zasadach statyki cieczy.
Pompy tłokowe
Ruchomy element roboczy który wytwarza różnice ciśnień między przestrzenią ssawną a tłoczną
pompy, potrzebną do wywołania ruchu cieczy jest w pompie tłokowej płaski tłok.
Parametrami pomp tłokowych są:
– wysokość ssania
– wysokość tłoczenia
– wydajność Q
– sprawność objętościowa
– moc
– sprawność ogólna
Schemat pompy tłokowej jednostronnego działania:

M a s z y n o z n a w s t w o
S t r o n a
| 24
P o l i t e c h n i k a P o z n a ń s k a
W pompie tłokowej ruchomy element roboczy wytwarza różnicę ciśnień między przestrzenią ssącą a
tłoczącą potrzebną do wywołania ruchu cieczy. Ilość cieczy określa zależność:
s – skok tłoka
n – ilość obrotów korby na minutę (50-250
obr
/
min
)
Pompy rotacyjne
Są pompami wyporowymi o obrotowym ruchu elementu roboczego. Elementy robocze tych pomp
podczas jednostajnego obrotu okresowo zwiększają przestrzeń ssawną zmniejszając przestrzeń tłoczną
i na odwrót w skutek czego następuje jednoczesne zasysanie cieczy do wnętrza komory roboczej i
wytłaczanie na zewnątrz. Elementy robocze stale oddzielają przestrzeń ssawną od tłocznej i zbyteczne
jest stosowanie zaworów. Przykładem pompy rotacyjnej jest pompa zębata:
P = 5-32 MPa
Q = 20 l/s
n = 0,7 – 0,85
Pompa łopatkowa –
do cieczy o własnościach samosmarujących
:
Wydajność Q do 500 m3/h
Ciśnienie pracy 100 MPa
Temperatura cieczy t = 450
o
C
Sprawność n = 0,5 – 0,9
M a s z y n o z n a w s t w o
S t r o n a
| 25
P o l i t e c h n i k a P o z n a ń s k a
KOTŁY I SILNIKI PAROWE
Kotły i silniki parowe służą do zamiany energii cieplnej na energię mechaniczną. Dostarczając ciepło
otrzymujemy w tych maszynach pracę. Pośrednikiem w tym procesie jest tak zwany czynnik
termodynamiczny
. Do wytwarzania pary wodnej służą kotły parowe które są podstawową częścią
siłowni parowej. Kocioł jest to naczynie zamknięte w którym pod działaniem energii cieplnej woda
przechodzi w parę o ciśnieniu wyższym od atmosferycznego, a para ta jest wykorzystywana na
zewnątrz kotła.
Wytwarzanie pary w kotle jest związane z trzema zjawiskami
a) spalaniem paliwa dla wytworzenia pewnej ilości ciepła
b) wymiana ciepła między spalinami a wodą zasilającą
c) parowaniem wody
Schemat urządzenia kotłowego:
1 – parownik
2 – palenisko
3 – wężownica
Kocioł powinien być stale zasilany wodą, powietrzem i paliwem. Produktem głównym kotła jest para
wodna o określonym ciśnieniu a produktem ubocznym s a spaliny, popiół i żużel.
Główne elementy kotła
1. Parownik – czyli właściwy kocioł w którym z wody wytwarza się parę mokrą nasyconą.
Składa się on z reguły z naczyń stalowych zwanych walczakami.
2. Palenisko – jest urządzeniem służącym do przetwarzania energii chemicznej paliwa na energię
cieplną w procesie spalania
3. Przegrzewacz pary – jego zadaniem jest osuszanie pary pobieranej z parownika oraz
przegrzanie jej do temperatury 300-350
o
C
Podstawowe parametry kotłów:
a) wydajność kotła D – jest to ilość pary wytworzonej podczas jednej godziny [kg/h ; t/h]
b) ciśnienie pary p – waha się w granicach od 50 KPa do 60 MPa
c) temperatura pary t – waha się w granicach od 100-700
o
C
d) powierzchnia ogrzewalna H – pole powierzchni ścianek parownika które są po jednej stronie
omywane wodą a po drugiej spalinami [m
2
], największe kotły – 20 000 m
2
e) natężenie powierzchni ogrzewalnej
D
/
H
– jest to stosunek wydajności kotła do pola
powierzchni ogrzewalnej [kg/m
2
·h]
Wartość tego parametru charakteryzuje wykorzystanie powierzchni ogrzewalnej i zależy od
konstrukcji paleniska i kotła a także od rodzaju paliwa i warunków pracy urządzenia
kotłowego
M a s z y n o z n a w s t w o
S t r o n a
| 26
P o l i t e c h n i k a P o z n a ń s k a
f) Wielokrotność parowania
D
/
B –
jest to stosunek wydajności kotła do ilości B – kg.
węgla
spalonego w ciągu jednej godziny
g) Sprawność urządzenia kotłowego __ wynosi od 0,5 do 0,74
O wartości sprawności urządzenia kotłowego decydują straty energii cieplnej. Największą
stratą jest tzw. strata kominowa spowodowana unoszeniem dużej ilości niewykorzystanego
ciepła przez gorące spaliny do komina.
SILNIKI PAROWE
Działanie silnika parowego polega na zamianie energii wewnętrznej czynnika o wysokiej temperaturze
na pracę. Zamiana ta może nastąpić tylko podczas wymiany ciepła między ciałem o wysokiej
temperaturze i ciałem o niskiej temperaturze . Silniki parowe mają zastosowanie w siłownikach
cieplnych w których prądnice wytwarzają prąd elektryczny i napędzane są turbinami parowymi.
Uproszczony schemat połączeń urządzeń siłowni parowej:
1 – kocioł parowy
2 – podgrzewacz pary
3- silnik parowy
4 – prądnica
5 – skraplacz
6 – pompa
Silniki parowe dzielimy na dwa rodzaje:
1. Tłokowe (objętościowe
2. Wirowe (przepływowe) czyli turbiny parowe
Tłokowy silnik parowy jest silnikiem cieplnym w którym energia wewnętrzna pary wodnej zamienia
się na pracę za pomocą tłoka poruszającego się w cylindrze ruchem posuwisto-zwrotnym. Ciśnienie
pary kotła działa na przemian lub po jednej stronie tłoka a ruch tłoka przekazywany jest przez układ
korbowy i przekształca się w ruch obrotowy wału korbowego.
Turbina parowa jest cieplnym silnikiem wirowym w którym energia wewnętrzna pary zamieniona w
dyszy w energię kinetyczną strugi zostaje przekazana łopatkom wirnika. Zasadniczymi elementami
turbiny parowej jest nieruchoma dysza i obracający się wirnik z odpowiednio ukształtowanymi
łopatkami.
Rozprężanie pary w turbinie może być dokonywane dwoma sposobami.
W turbinie akcyjnej
rozprężania zachodzi jedynie w dyszy a przepływ strugi pary przez kanał
międzyłopatkowy wirnika odbywa się przy stałym ciśnieniu czyli kanał międzyłopatkowy ma stałe
pole przekroju poprzecznego.
M a s z y n o z n a w s t w o
S t r o n a
| 27
P o l i t e c h n i k a P o z n a ń s k a
W turbinie reakcyjnej
para rozpręża się częściowo w dyszy a częściowo w kanałach
międzyłopatkowych wirnika czyli kanał międzyłopatkowy zmienia się podobnie jak w dyszy/
TURBINY PAROWE AKCYJNE
Głównym elementem turbiny parowej jest nieruchoma dysza i obracający się wirnik z łopatkami. W
dyszy zmniejsza się ciśnienie pary a wzrasta jej prędkość. Struga pary przepływającej wzdłuż łopatek
wywiera na nie napór co powoduje ruch obrotowy wirnika. W turbinie parowej reakcyjnej para
przepływająca przez zwężające się kanały między łopatkami wirnika rozpręża się w nich i zwiększa
swoją prędkość względną a przyspieszeniu towarzyszy powstanie reakcji hydrodynamicznej która
obraca wirnik.
SILNIKI SPALINOWE
Przekształcają energię cieplną paliw na pracę mechaniczną. Są to silniki o spalaniu wewnętrznym co
oznacza, że paliwo jest spalane bezpośrednio w cylindrze roboczym silnika, bądź też w komorze
spalania stanowiącą całość z konstrukcją silnika.
Pod względem konstrukcyjnym wyróżniamy następujące rodzaje silników spalinowych:
a) silniki tłokowe o ruchu tłoka postępowo - zwrotnym
b) silniki typu Wankla z tłokami wirującymi
c) przepływowe silniki wirowe (turbiny spalinowe i gazowe)
d) przepływowe silniki odrzutowe (przelotowe i rakietowe)
Tłokowe silniki spalinowe dzielimy:
a) ze względu na cykl pracy na 4-suwowe i 2-suwowe
b) w zależności od sposobu przygotowywania mieszanki na wtryskowe i gaźnikowe
c) ze względu na rodzaj zapłonu na silniki z zapłonem iskrowym (niskoprężne) i z zapłonem
samoczynnym (wysokoprężne)
d) ze względu na sposób chłodzenia na silniki chłodzone powietrzem i cieczą
e) ze względu na rodzaj konstrukcji na silniki z układem korbowym i bezkorbowym
Schemat silnika spalinowego:
1 – kadłub z blokiem cylindrowym
2 – skrzynia korbowa
3 – głowica z zaworami
4 – układ korbowy

M a s z y n o z n a w s t w o
S t r o n a
| 28
P o l i t e c h n i k a P o z n a ń s k a
Tłokowy silnik spalinowy z posuwisto-zwrotnym ruchu tłoka składa się z następujących
głównych części:
1. kadłub z blokiem cylindrycznym o jednym lub kilku cylindrach
2. skrzyni korbowej stanowiącej osłonę wału korbowego będącej jednocześnie zbiornikiem oleju
3. głowicy ograniczającej roboczą przestrzeń cylindrów
4. układu korbowego który stanowi zespół składający się z tłoka wraz z pierścieniami
uszczelniającymi , zgarniającymi, sworzni tłokowych, korbowodów wału korbowego i koła
zamachowego.
Wyszukiwarka
Podobne podstrony:
Wyznaczanie zacisków maszyn pr , Politechnika Poznańska
PYT-EGZ-MASZYNY-OPRACOWANIE, Politechnika Poznańska, 2 rok, III, Maszyny el
zaliczenie odpowiedzi, Politechnika Poznańska - Wydział Budowy Maszyn i Zarządzania, Mechanika i Bud
Zarządzanie jakością - karty kontrolne, Politechnika Poznańska - Mechanika i budowa maszyn - I stopi
TW - wyklady - Kopia, POLITECHNIKA POZNAŃSKA, LOGISTYKA, semestr IV, technologia maszyn
Projekt podnośnik nożycowy trapezowy ze śrubą rzymską; Politechnika Poznańska; Wydział Budowy Maszyn
Inspiracja utworem... - referat, Politechnika Poznańska - Wydział Budowy Maszyn i Zarządzania, Mecha
Program -Wykłady Technologia Maszyn, POLITECHNIKA POZNAŃSKA, LOGISTYKA, semestr IV, maszyny technolo
Pytania na zaliczenie z Mechaniki Płynów, Politechnika Poznańska, Mechanika i Budowa Maszyn, III rok
zadania z egzaminu, Politechnika Poznańska - Wydział Budowy Maszyn i Zarządzania, Mechanika i Budowa
Pytania egz.MIUT stacjon.I st s.6 2014-15, Politechnika Poznańska (PP), Inne, MUT, new folder, Maszy
ME-pytania egz(Elektrotechnika S-2014-2015), Politechnika Poznańska, 2 rok, IV, Maszyny el
Falownik-sprawko, Politechnika Poznańska (PP), Elementy i układy automatyzacji maszyn, Laboratorium,
pytania 2012-2013, Politechnika Poznańska - Wydział Budowy Maszyn i Zarządzania, Mechanika i Budowa
ściąga z Fizy semI, Politechnika Poznańska - Wydział Budowy Maszyn i Zarządzania, Mechanika i Budowa
więcej podobnych podstron