Częstotliwościowe metody analizy UR
Celem ćwiczenia jest komputerowa analiza własności układów regulacj na podstawie charakterystyk
częstotliwościowych:
- amplitudowo-fazowej (Nyquista),
- wskaźników jakości: regulacji oraz nadążania.
1. Przebieg ćwiczenia
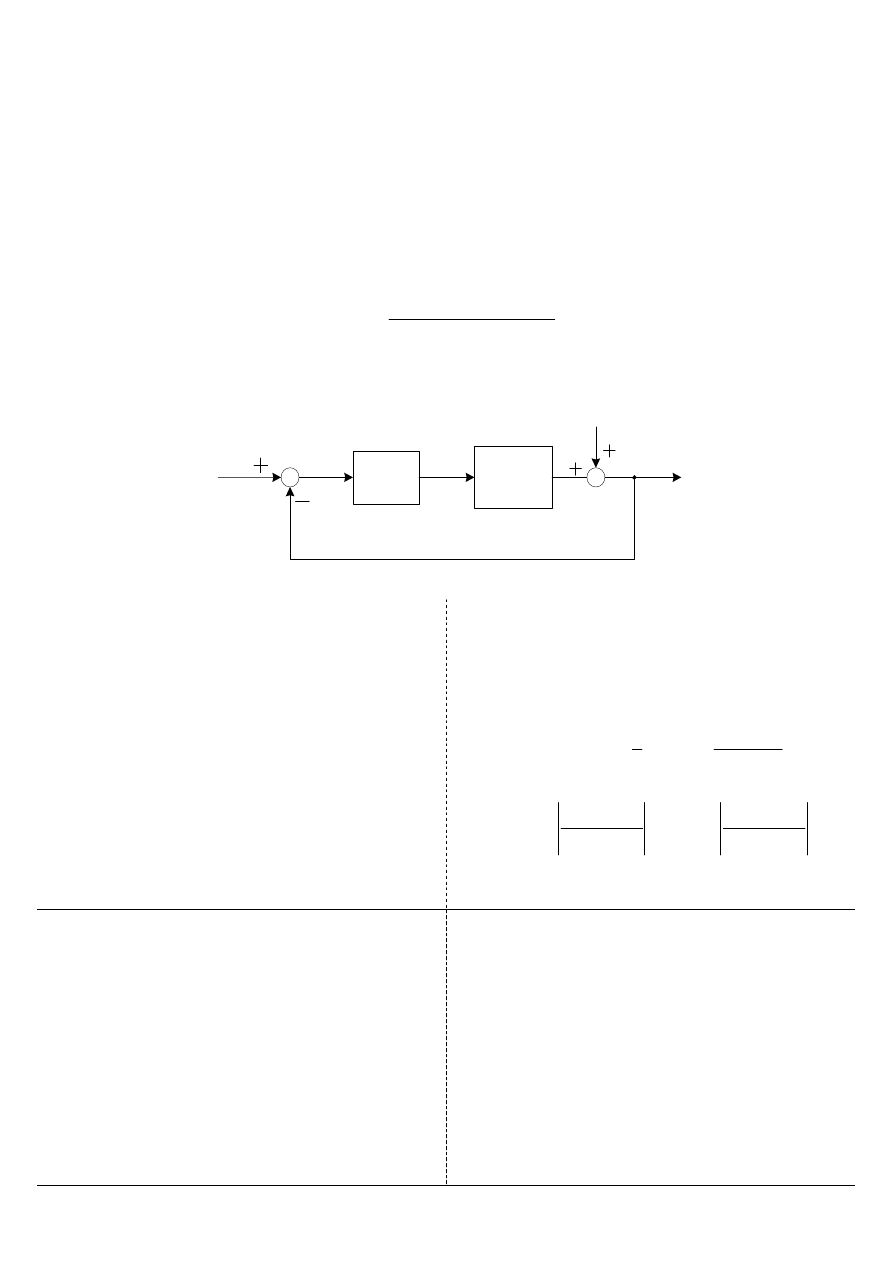
Przeprowadź analizę zamkniętego układu regulacji przedstawionego na rys.1 z obiektem o transmitancji:
( ) ( )(
)(
)
1
2
.
1
1
1
k
K s
s
sT
sT
=
+
+
+
Dobierz parametry k, T
1
oraz T
2
(k>1; T
1
, T
2
>0) tak aby zamknięty układ (dla
( )
1
r
K s
=
) b
Ry 1
1.1.Zbadaj własności zamkniętego układu regulacji
z obiektem o transmitancji
ył stabilny.
( )
w t
( )
y t
( )
r
K s
( )
K s
( )
z t
( )
u t
s.
•
( )
K s
oraz
( )
1
K s
r
=
otwartego, zaznacz
oraz fazy układu zamkniętego,
przebieg y(t) odpowiedzi układu zamkniętego
na wymuszenie skokowe w(t):
( )
( )
1
Y s
G s
s
=
;
( )
( )
( )
1
o
K s
G s
=
+
o
K s
,
c) przebieg wskaźników częstotliwościowych:
( )
( )
( )
( )
( )
1
o
o
K
j
ω
, q
1
1
o
M
K
j
K
j
ω
ω
ω
ω
=
=
( )
( ) ( )
.
o
r
K
j
K
j
K j
ω
ω
ω
=
( )
K s
k
=
r
r
r
k
a) charakterystykę amplitudowo-fazową układu
otwart
oraz fazy układu zamkniętego,
odpowiedź skokową układu zamkniętego,
przebieg wskaźników częstotliw
Wykreśl wszystkie odpowiednie przebiegi na jedn
nku
.
• Wskaż „optymalną” nastawę regulatora P i
uzasa
zapas modułu, czas regulacji, przeregulowanie,
błąd w stanie ustalonym).
.
W tym celu sporządź:
a) charakterystykę amplitudowo-fazową układu
i odczytaj zapas amplitudy
b)
+
+
1.2. Zbadaj wpływ nastaw regulatora P:
na własności układu.
• Dla trzech wybranych wartości wzmocnienia
wykreśl:
ego, zaznacz i odczytaj zapas amplitudy
b)
c)
ościowych.
ym
rysu
dnij swój wybór (uwzględnij: zapas fazy,
1.3. Zbadaj wpływ nastaw regulatora PI:
( )
1
c
K
1
r
r
s
k
sT
=
+
Prz
i T
c
.
obierz tak aby zapas amplitudy wynosił
∆k = 2.
.a, b i c).
na własności układu..
yjmij trzy dowolne wartośc
D
r
k
Wykreśl komplet charakterystyk (1.2
Wskaż „najlepsze” nastawy regulatora.
( )
1
c
K
1
r
r
d
s
k
T s
sT
na własności układu.
Wykreśl komplet charakterystyk (1.2.a,
je
r
c
d
„akceptowalne” własności zamkniętego układu
regulacji.
k T T
Dla wybra
o
nadążania oraz wskaźnik tłumienia zakłóceń.
Skomentuj uzyskane wyniki.
muszenie
( )
sin
w t
t
ω
=
.
Z charakterystyki nadążania
( )
M
ω
wybierz trzy
wartości częstotliwości z pasm:
1
ω
- nadążania,
2
ω
-
3
rezonansowego i
ω
- nadrezonansowego. W
O
y
l
kreś
ad
odpowiedzi (W STANIE USTAL NYM !) ukł u
zamkniętego na wymuszenie sinusoidalne:
( )
1
2
3
,
,
sin
w t
t
ω ω ω ω
ω
=
=
(
2
rez
ω
ω
=
). Porównaj stosunek
am it d sy nału wyjściowego y(t) do wejściowego
aź
ążania
pl u , g
w(t), z wartością wsk nika nad
( )
i
M
ω
.
ulacji powinny być stabilne.
1.4. Zbadaj wpływ nastawy regulatora PID:
=
+
+
b i c) dla
dnego zestawu nastaw , , zapewniającego
1.5. Zbadaj wpływ regulatorów P, PI, PID.
nych „najlepszych” nastaw regulatora P, PI
raz PID wykreśl (na jednych rysunkach) wskaźnik
1.6. Dokonaj analizy odpowiedzi układu
zamkniętego, z regulatorem PI (lub PID), na
wy
Uwaga: Wszystkie układy reg
2. Sprawozdanie
• Opracuj i przedstaw wszystkie charakterystyki u yskane podczas realizacji ćwiczenia
aną „optymalną” nastawę regulatora P
ów i odnieś je do
Po
e
ltiview(K), step(K), nyquist(K), bode(K),
zależność moduł transmitancji G od częstotliwości
ω
resu
usoidalne sin(
ω t):
,T] =gensig(’sin’,tau,czas_koncowy)
- wygenerowanie pobudzenia u(t) = sin(
ωt); tau – okres [s]
ia
z
• Omów wskaz
• Porównaj przebiegi wskaźników oraz zapasy stabilności dla różnych nastaw regulator
możliwości kształtowania własności układów
• Wyciągnij wnioski
lec nia Matlab’a:
bodemag(G) – rysuje
title(‘Text’) – dodaje tytuł do bieżącego wyk
legend(‘K1’,’ K2’,’ K3’, ...) – dodaje legendę do bieżącego wykresu
Konstrukcja odpowiedzi układu o transmitancji G na wymuszenie sin
[U
lsim(G,U,T)
-
symulacja
Zadania kontrolne przed przystąpieniem do ćwiczen :
obliczyć zapas fazy i zapas amplitudy dla zadanego
kładu dynamicznego lub parametry układu zapewniające daną wielkość zapasu fazy i amplitudy.
1)
u
Przykładowe transmitancje obiektu:
(
)
( )
1
K s
sT
+
(
)
2
( )
1
k
K s
s
sT
=
+
3)
(
)
( )
,
1
n
k
K s
n N
sT
=
∈
+
k
=
2)
Wyszukiwarka
Podobne podstrony:
Ćw 5 Częstotliwościowe metody analizy UR
Ćw 5 Częstotliwościowe metody analizy UR
Metody analizy otoczenia
Instrumentalne metody analizy
Metody analizy?ektywności ekonomicznej P1
Kalend.-Ćwiczeń-z-Now.-Met.-Anal.-Żywn.-13-14, Nowoczesne metody analizy żywności
Wybrane metody analizy jakościowej. Reakcje analityczne wybranych anionów, sprawka z chemi utp rok I
Metody analizy danych
sprawko tran, Nowoczesne metody analizy żywności
METODY ANALIZY ZJAWISK MASO, Inne
WYBRANE METODY ANALIZY WIELOZMIENNOWEJ
Metody analizy?ektywności ekonomicznej inwestycji W2
9 Metody analizy strategicznej otoczenia bliższego i?lszego
Metody analizy instrumentalnej
13. Miareczkowanie amperometryczne, Technologia Chemiczna, Rok III, Semestr II, Instrumentalne metod
Metody analizy słowotwórczej
metody analizy fin
więcej podobnych podstron