MECHANIKA BUDOWLI
Architektura sem. II letni
GEOMETRIA MAS
dr inż. Marek BARTOSZEK
KTKB p.126 WB
11-3-22
Za wszystkie uwagi odnośnie poniższych wykładów z góry dziękuję.
Jeśli ktoś chciałby wykorzystać te materiały to proszę o kontakt.
www.rb.polsl.pl
22.03.11
dr inż. Marek Bartoszek
2
Geometria mas
Geometria figur płaskich (pól przekrojów)
Wprowadzenie
22.03.11
dr inż. Marek Bartoszek
3
Geometria mas a geometria figur
płaskich (przekrojów)
Masa
m
dowolnego elementu
konstrukcji zależy od jego
objętości
V
:
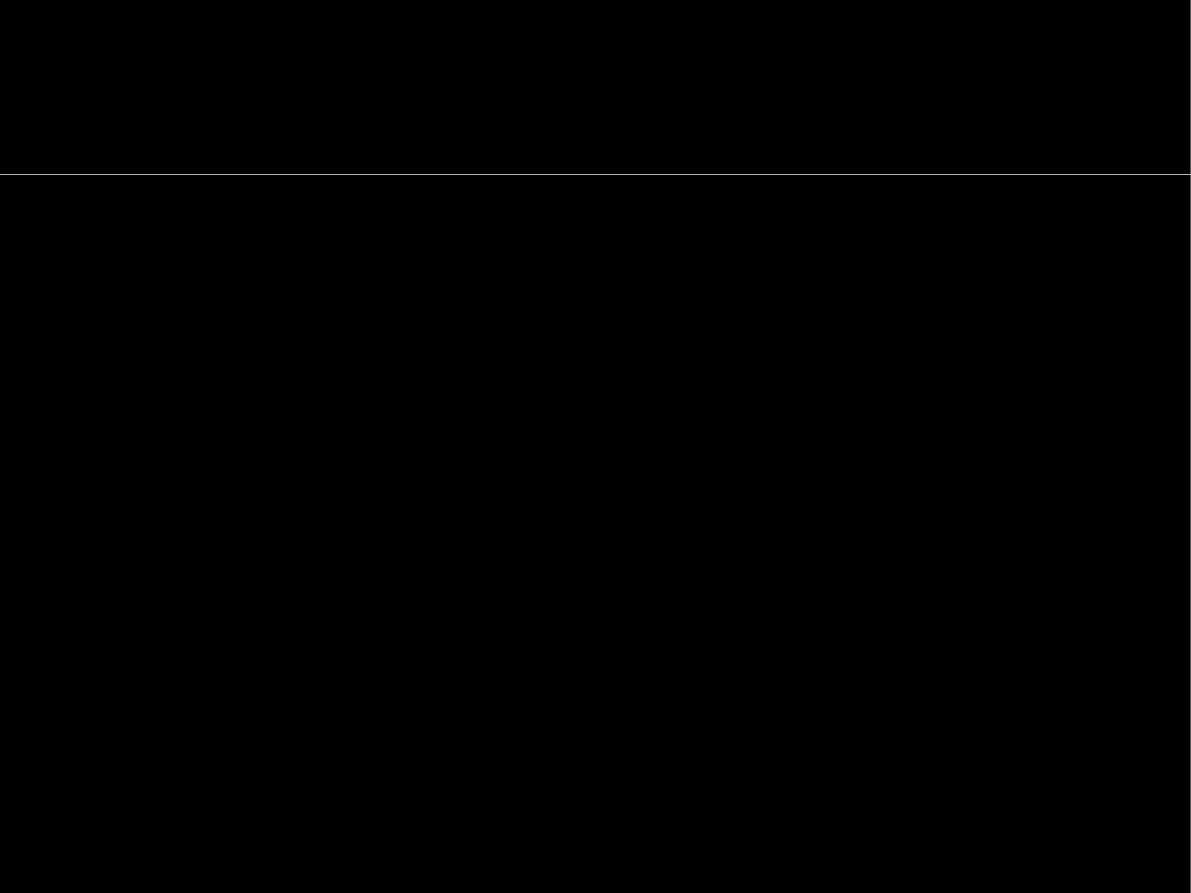
Objętość
V
pręta o stałym
przekroju na całej długości
L
(
pręt pryzmatyczny
) zależy
głównie od pola
A
jego
przekroju poprzecznego:
Tak więc
geometria mas
w przypadku elementów
prętowych zwykle sprowadza
się do
geometrii pól
przekroju
.
b
h
y
x
z
L
m=∗V
m=∗L∗A
A=b*h
V=L*A
22.03.11
dr inż. Marek Bartoszek
4
Geometria mas
Charakterystyka geometryczna przekroju
Wielkości charakteryzujące
geometrię pola przekroju:
●
Wymiary [m]: b, h, t, a
●
Pole powierzchni [m
2
]:A lub F
●
Momenty statyczne pola
[m
3
]:
S
x
, S
y
●
Momenty bezwładności i
dewiacji pola
[m
4
]: I
x
, I
y
, D
xy
●
Promienie bezwładności
[m]:
i
x
, i
y
●
Wskaźniki zginania
[m
3
]:
W
x
, W
y
Z. Dyląg i in. str.174 rys 8.12
22.03.11
dr inż. Marek Bartoszek
5
Geometria mas
Przekrój złożony z figur prostych
Figury proste
– znane są ich
charakterystyczne wielkości
geometryczne (m.in.: pole
powierzchni, położenie
środka ciężkości i momenty
bezwładności).
Dane geometryczne różnych
podstawowych figur
zestawiono w tablicach.
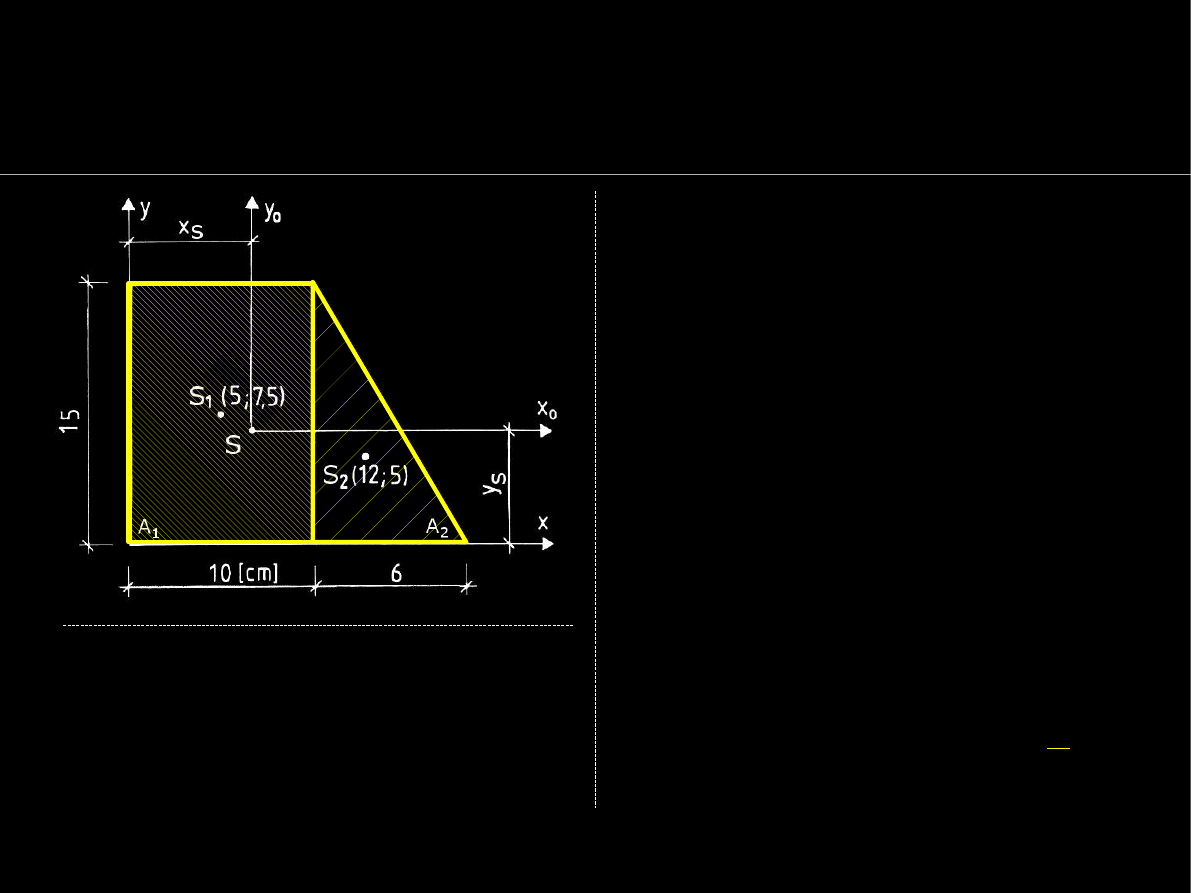
Jeżeli
pole przekroju A
składa
się z kilku
figur prostych
A
i
(jak na rysunku), to mówimy
o złożonym przekroju
poprzecznym pręta
.
A=
∑
i=1
2
A
i
Przekrój dzielimy na figury proste
w taki sposób, aby ułatwić dalsze
obliczenia.
Również układ współrzędnych dobiera
się kierując prostotą dalszych obliczeń.
22.03.11
dr inż. Marek Bartoszek
6
Geometria mas
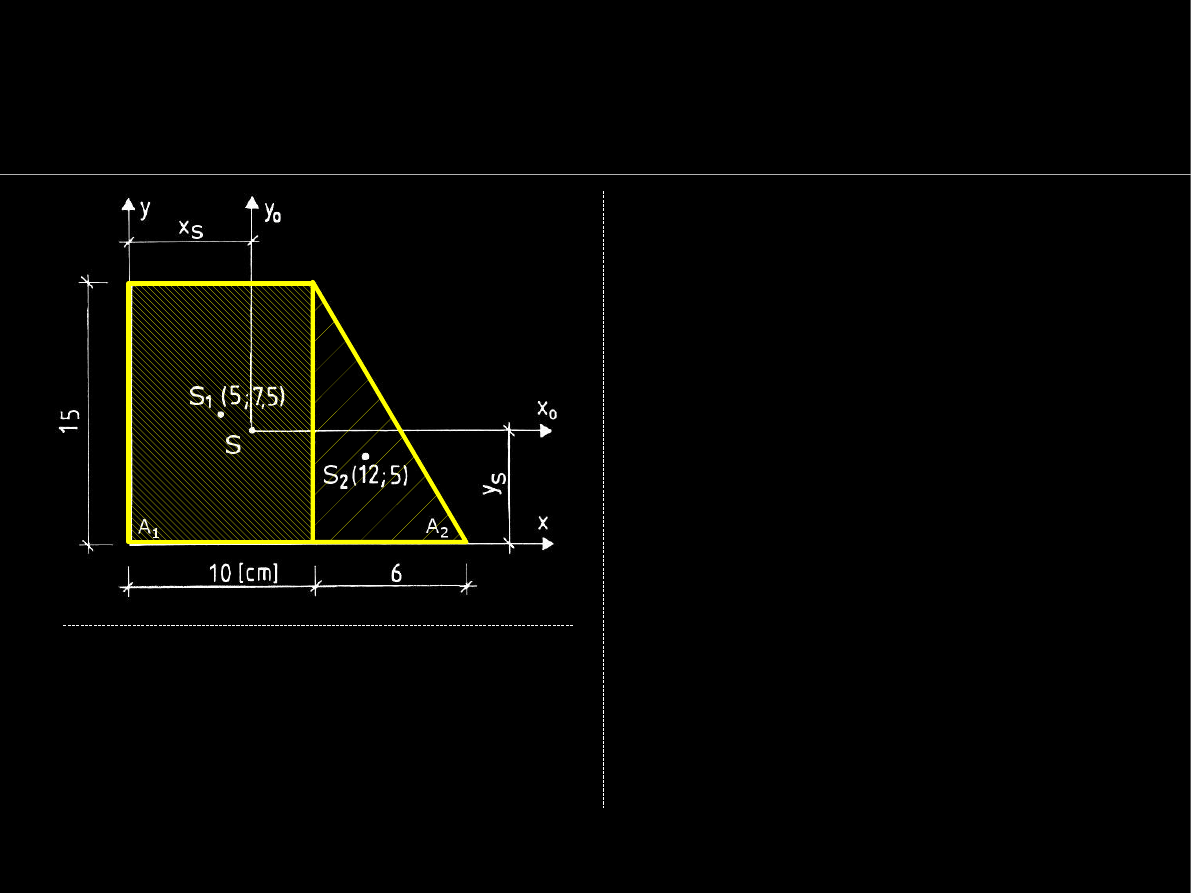
Geometria przekroju złożonego
Złożony przekrój
A
dzieli się na
figury proste
A
i
.
Pole złożonego przekroju A
jest oczywiście sumą
pól
figur składowych A
i
:
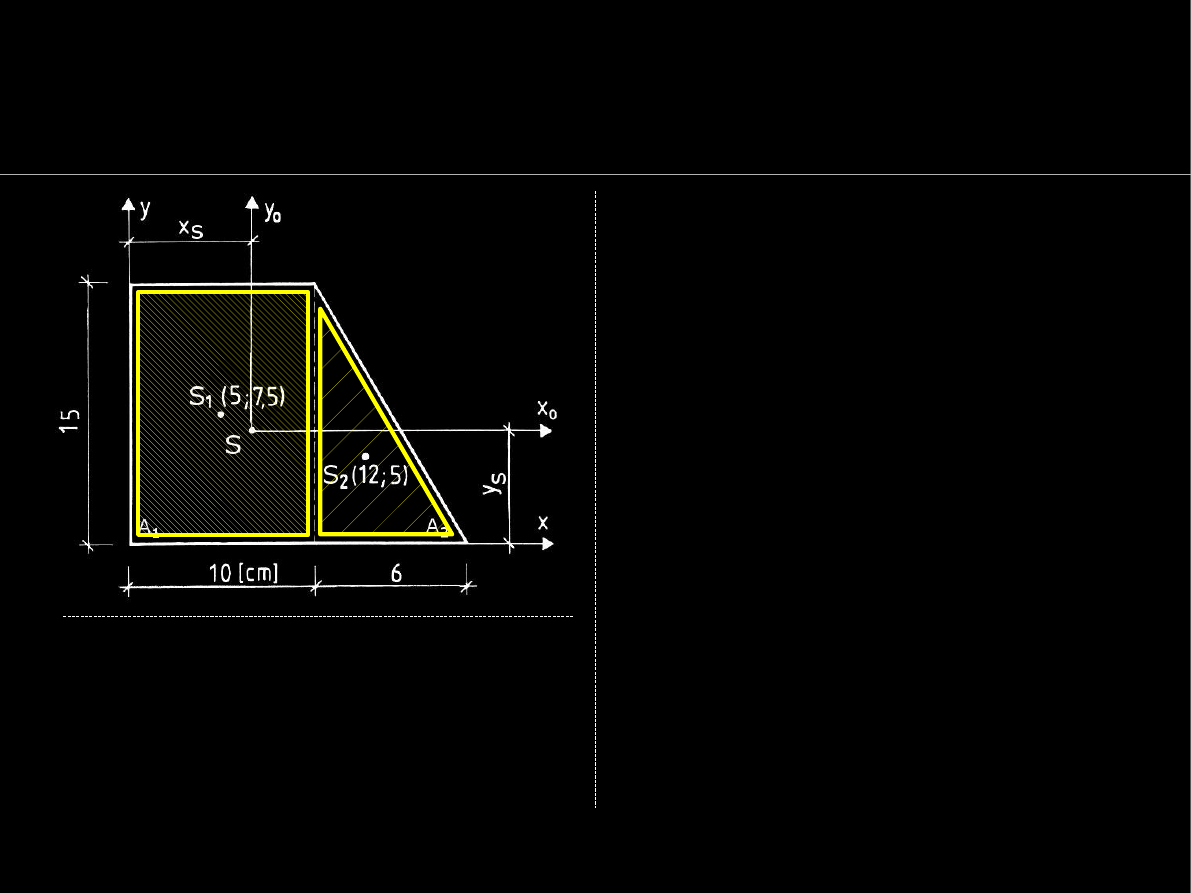
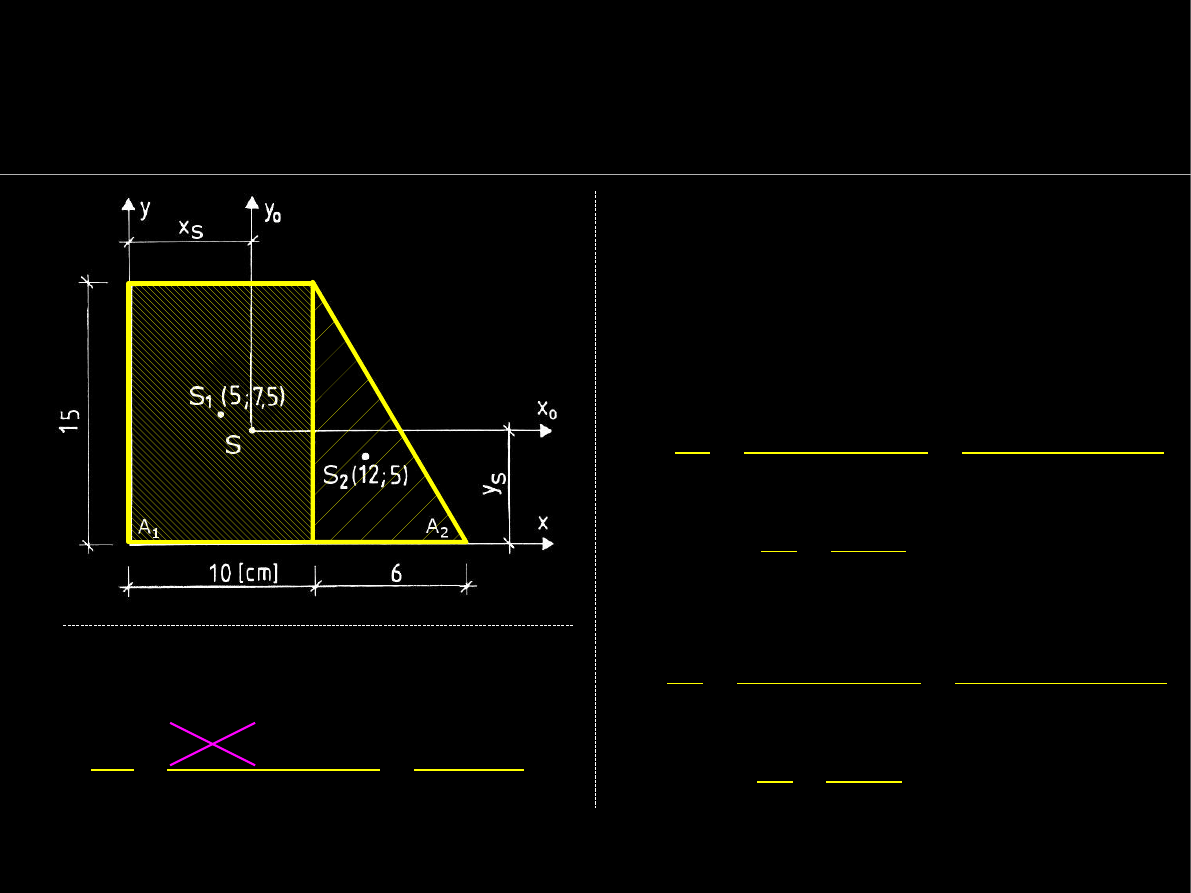
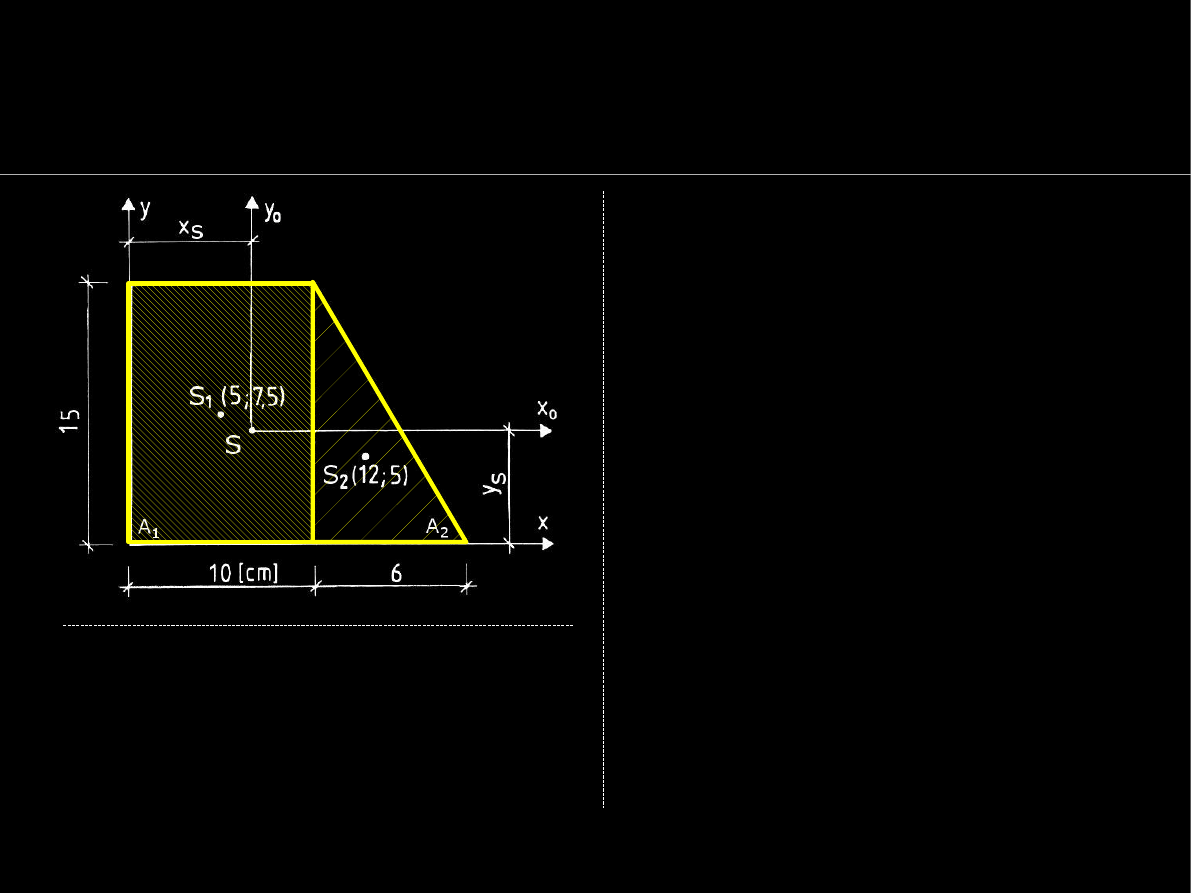
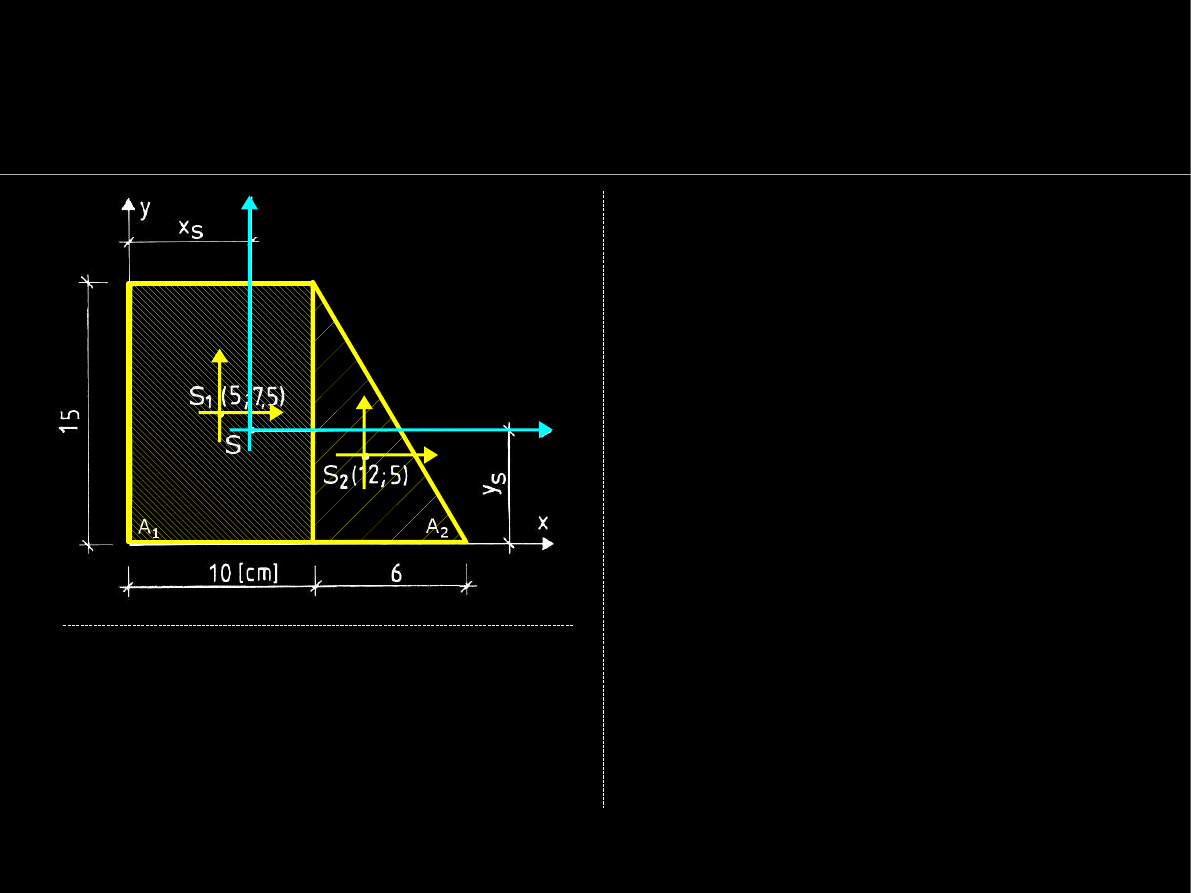
Dla przekroju z rysunku obok
otrzymamy sumę pól:
A=
∑
i=1
2
A
i
=
A
1
A
2
=
150
1
2
⋅
90=
=
195 cm
2
Pola, momenty statyczne
i momenty bezwładności
przekroju
złożonego A
oblicza się sumując
odpowiednie wielkości dla figur
składowych
A
i
.
A=
∑
i=1
n
A
i
=
A
1
A
i
A
n
22.03.11
dr inż. Marek Bartoszek
7
Geometria mas
Figury proste – bierzemy wzory z tablic
Na podst. tablic dla prostokąta i
trójkąta jako figur prostych:
I
x
1
1
=
dx⋅dy
3
12
=
10⋅15
3
12
=
2812,5 cm
4
I
y
1
1
=
dy⋅dx
3
12
=
15⋅10
3
12
=
1250 cm
4
D
x
1
y
1
1
=
0 cm
4
W tablicach matematycznych znajdziemy
wzory dla figur geometrycznych
Gotowe wartości liczbowe dla profili
walcowanych (dwuteowników,
kątowników, itp) zestawiono
w tablicach konstrukcji metalowych
I
x
2
2
=
dx⋅dy
3
36
=
6⋅15
3
36
=
562,5 cm
4
I
y
2
2
=
dy⋅dx
3
36
=
15⋅6
3
36
=
90 cm
4
D
x
2
y
2
2
=
−
dx
2
⋅
dy
2
72
=
−
6
2
⋅
15
3
72
=−
112,5cm
4
A
1
=
dx⋅dy=10⋅15=150 cm
2
A
2
=
1/2⋅dx⋅dy=1/ 2⋅6⋅15=45 cm
2
y
2
x
2
x
1
y
1
dx
1
dx
2
dy
22.03.11
dr inż. Marek Bartoszek
8
Geometria mas
Momenty statyczne
– środek ciężkości przekroju
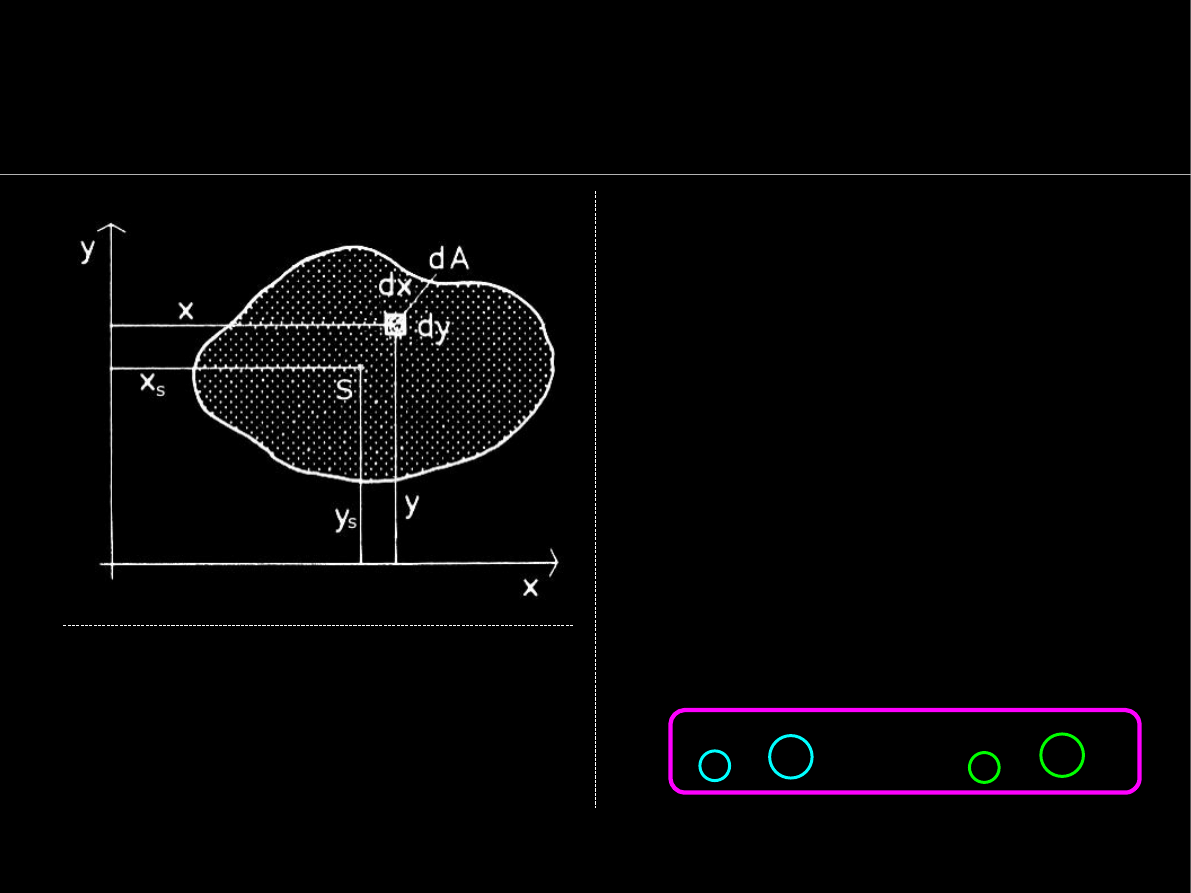
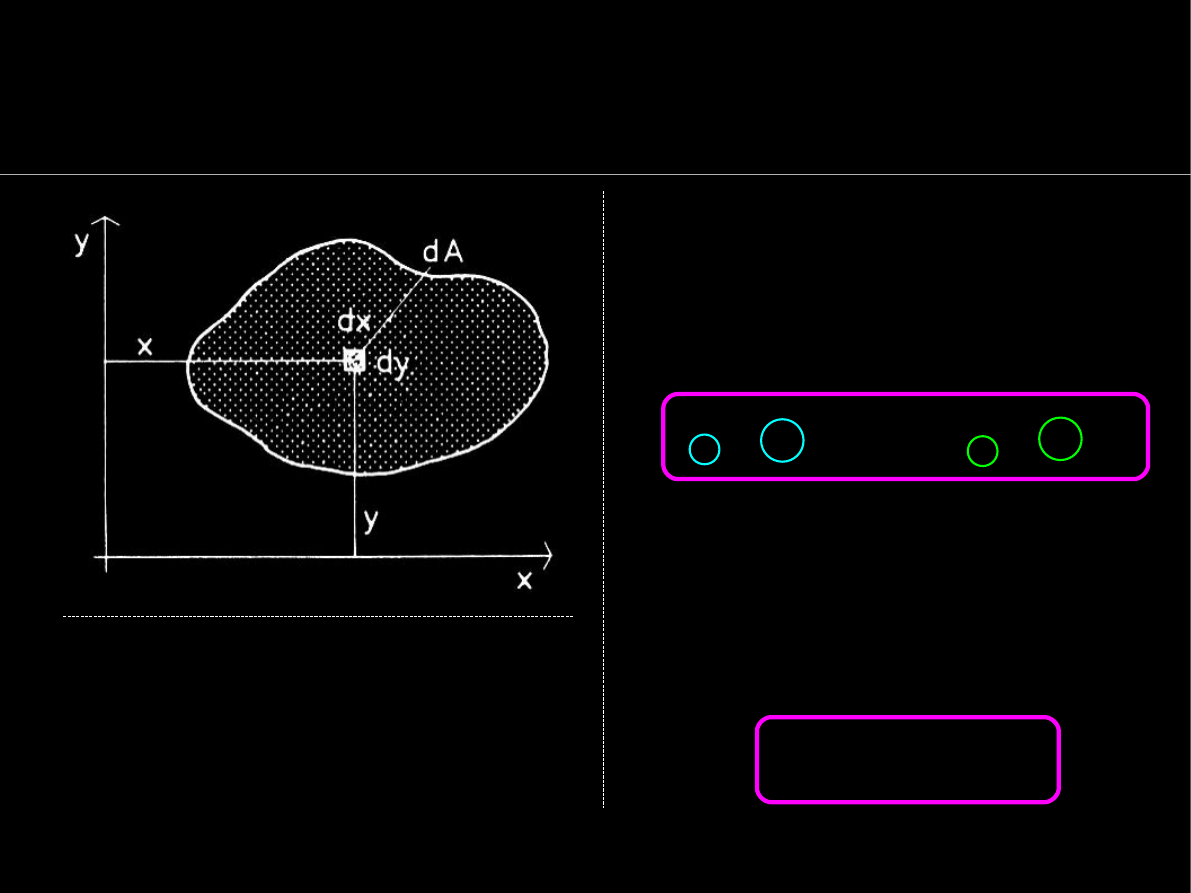
Jeśli pole przekroju
A
ma
środek ciężkości w punkcie
S(x
s
,y
s
)
w układzie
OXY
, to
momenty statyczne S
x
, S
y
pola
A względem osi
OX i OY
tego
układu
oblicza się jako:
Momenty statyczne
dowolnego
pola
A
względem osi układu
OXY
definiuje się jako sumy:
S
x
=
A∗y
s
oraz
S
y
=
A∗x
s
S
x
=
∫
y dA
oraz
S
y
=
∫
x dA
Aby uniknąć pracochłonnego całkowania
pole przekroju dzieli się na figury
proste – o znanych charakterystykach
geometrycznych.
O
(x
s
,y
s
)
A
22.03.11
dr inż. Marek Bartoszek
9
Geometria mas
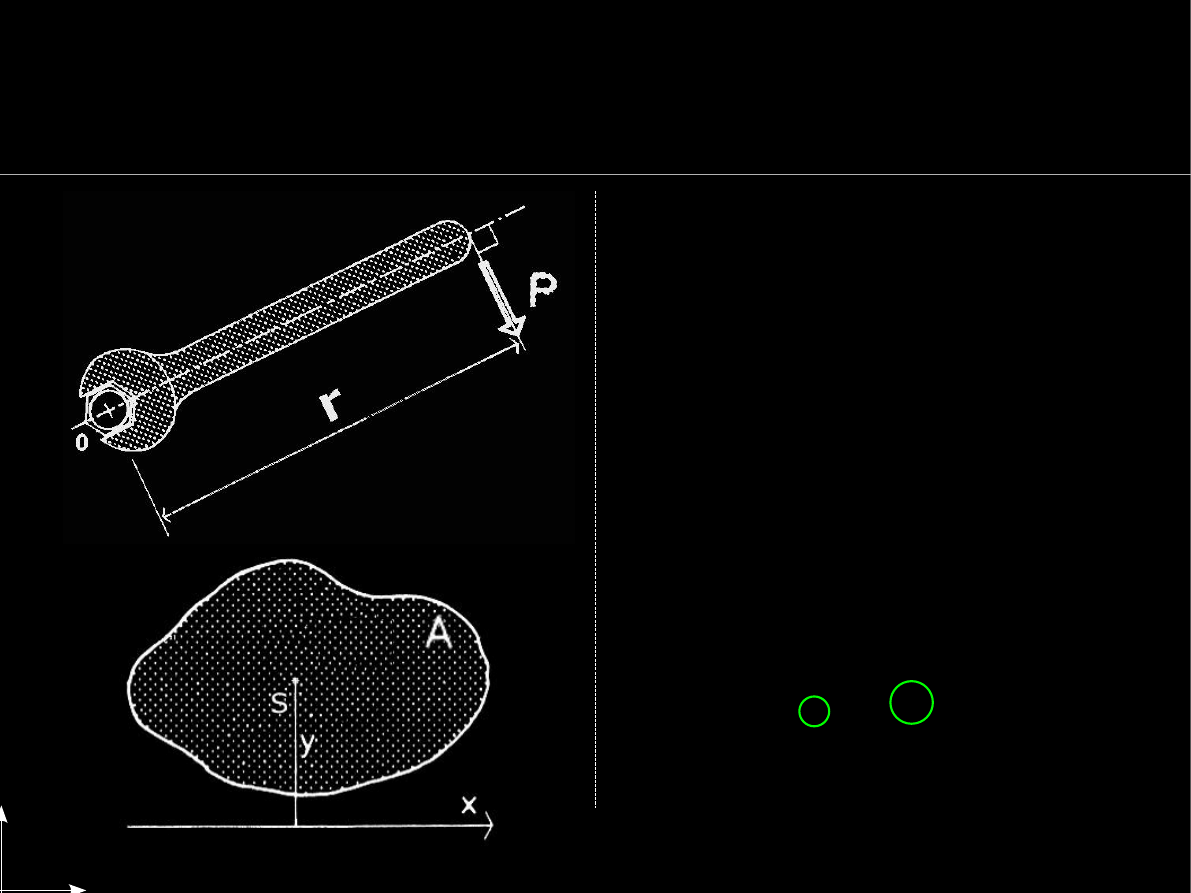
Moment statyczny pola a moment siły
Moment statyczny pola
jest
analogią do
momentu siły
skupionej w statyce
:
Moment M siły P w statyce to:
r
– jest
odległością
osi obrotu
O od kierunku działania siły
P
.
Moment statyczny pola
A
względem osi OX – czyli
S
x
:
y
– jest
współrzędną
środka
ciężkości pola
A
wzgl. osi OX.
S
x
=
A∗y
M=P∗r
x
y
22.03.11
dr inż. Marek Bartoszek
10
Geometria mas
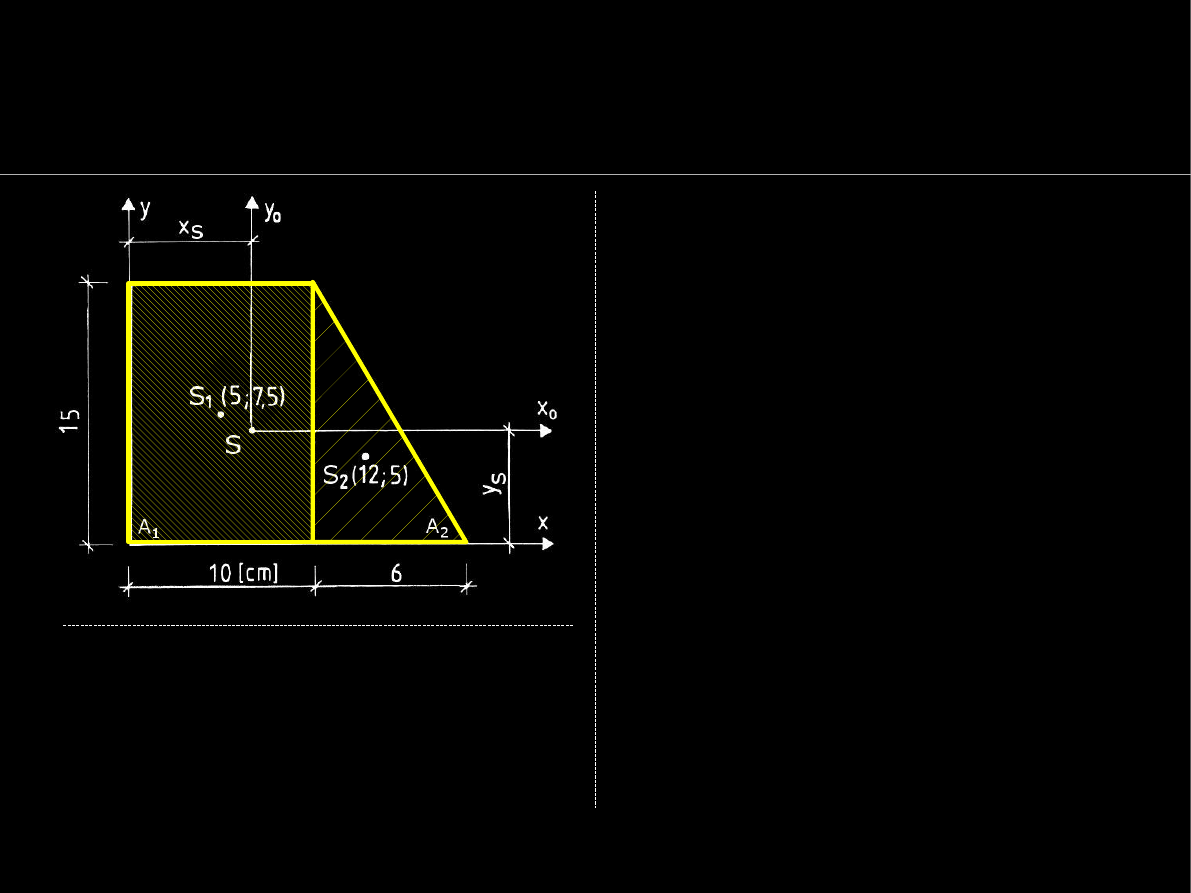
Momenty statyczne przekroju złożonego
Momenty statyczne pola
wzgl.
osi OX i OY układu współrz.
dla
przekroju złożonego
są
sumą tychże dla fig. skład.:
Dla przekroju obok otrzymamy:
S
x
=
∑
i=1
2
S
x
i
=
y
1
A
1
y
2
A
2
=
7.5⋅150
5⋅45=1350 cm
3
S
y
=
x
1
A
1
x
2
A
2
=
5⋅150102⋅45=
=
1290 cm
3
Dodawać można tylko te momenty
statyczne
S
x
(i)
(lub
S
y
(i)
), które są
obliczone względem tej samej osi OX
(lub OY) lub osi pokrywających się –
leżących na jednej linii.
S
x
=
∑
i=1
n
S
x
i
=
∑
i=1
n
y
i
A
i
S
y
=
∑
i=1
n
S
y
i
=
∑
i=1
n
x
i
A
i
22.03.11
dr inż. Marek Bartoszek
11
Geometria mas
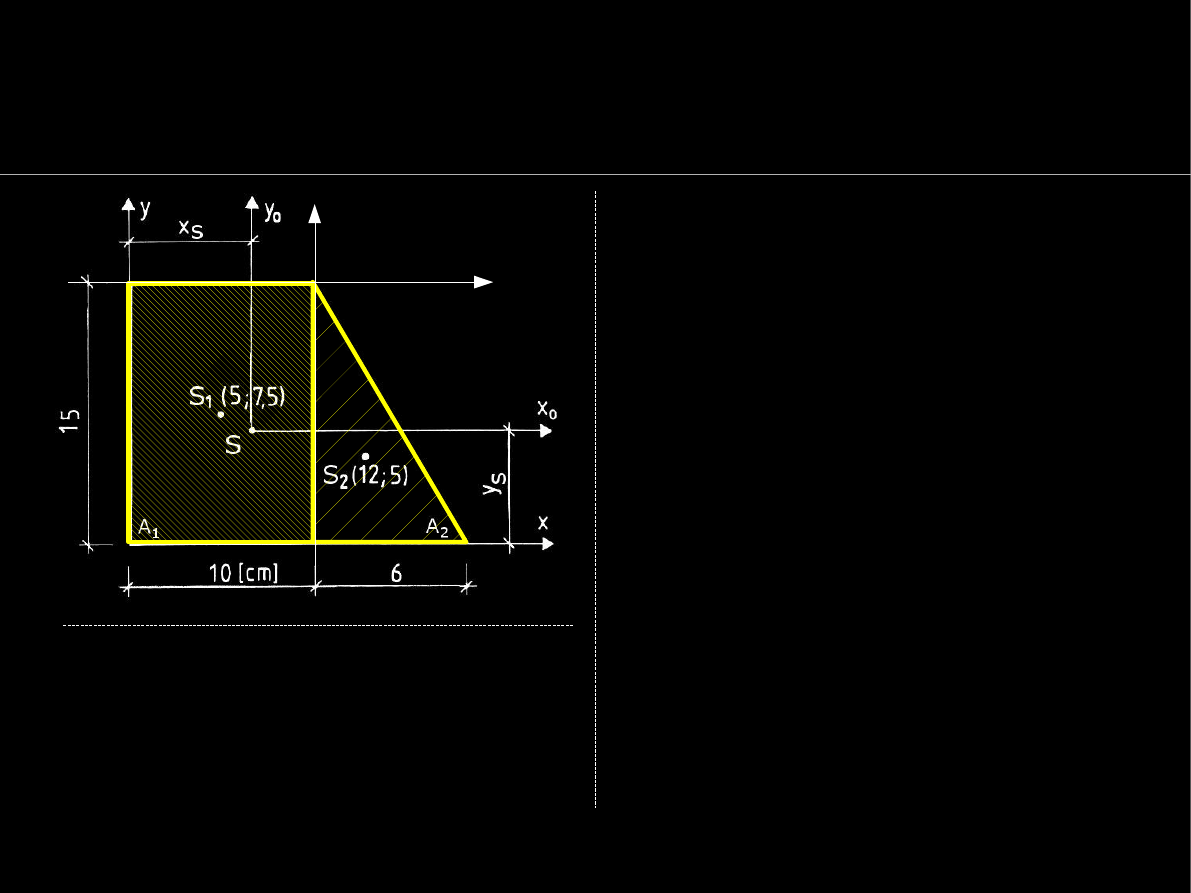
Momenty statyczne – przykład c.d.
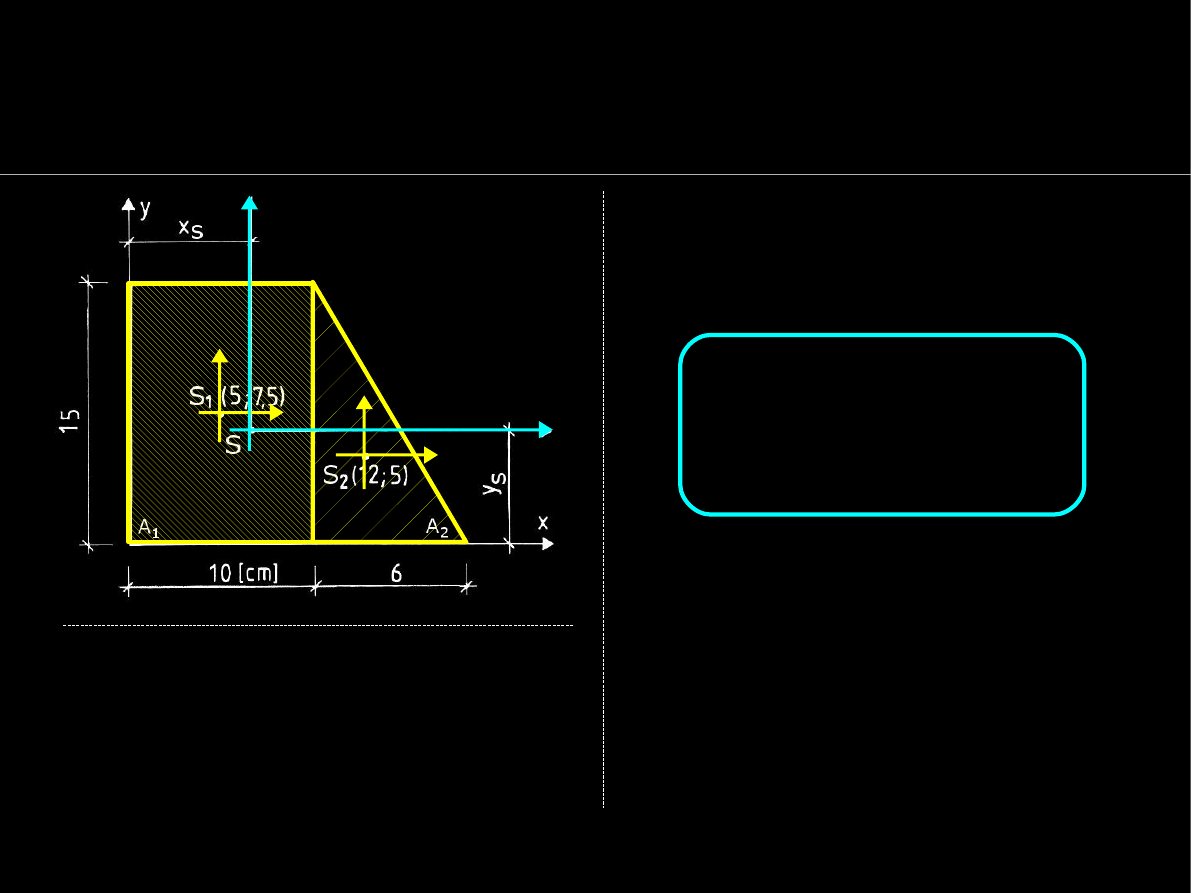
Natomiast względem OX'Y'
momenty statyczne pola
przekroju obok obliczymy:
Momenty statyczne figur
obliczone względem różnych
osi nie sumuje się (
!
) :
S
x '
=
y '
1
A
1
y '
2
A
2
=−
7.5⋅150−
−
10⋅45=1575 cm
3
S
y '
=
x '
1
A
1
x '
2
A
2
=−
5⋅1502⋅45=
=−
660 cm
3
Sumować można tylko te momenty
statyczne
S
x
(i)
(lub
S
y
(i)
), które są
obliczone względem tej samej osi OX
(lub OY) lub osi pokrywających się –
leżących na jednej linii.
y'
x'
S
y
0
1
S
y '
2
=
błąd !
−
różne osie OY
0
i OY '
S
x
0
1
S
x
2
=
błąd !
−
różne osie OX
0
i OX
22.03.11
dr inż. Marek Bartoszek
12
Wzory na momenty statyczne
dla całego pola przekroju
wymagają znajomości
współrzędnych
jego
środka
ciężkości
x
s
i
y
s
:
Znając
pole powierzchni A
całego przekroju oraz jego
momenty statyczne
S
x
, S
y
wyznaczymy
współrzędne
jego
środka ciężkości x
s
i
y
s
:
Geometria mas
Środek ciężkości przekroju – momenty statyczne
S
x
=
A
∗
y
s
⇒
y
s
=
S
x
A
S
y
=
A
∗
x
s
⇒
x
s
=
S
y
A
S
x
=
A
∗
y
s
lub
S
y
=
A
∗
x
s
Momenty statyczne
S
x
(i)
i
S
y
(i)
) oraz pola
powierzchni
A
i
przekroju złożonego
obliczymy jako sumy odpowiednich
wielkości dla figur składowych.
22.03.11
dr inż. Marek Bartoszek
13
Geometria mas
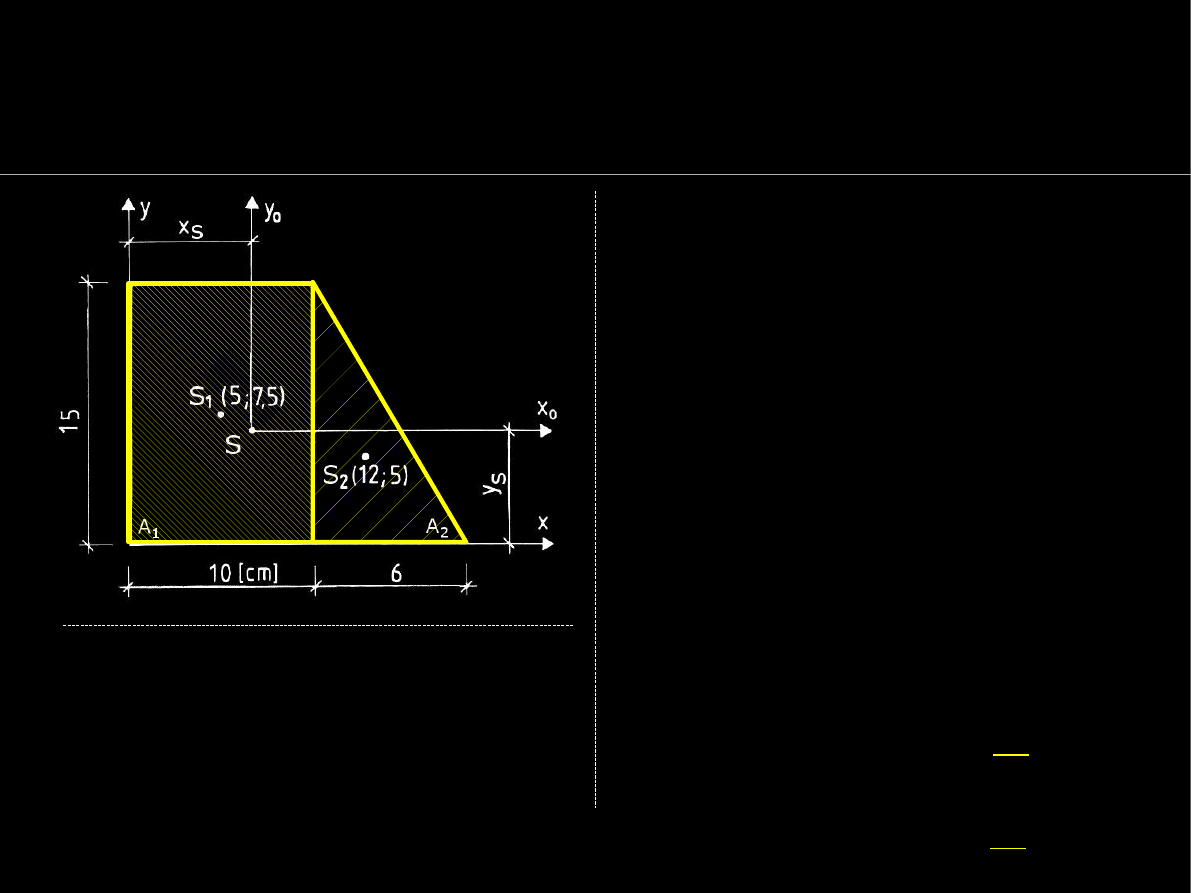
Środek ciężkości przekroju – przykład
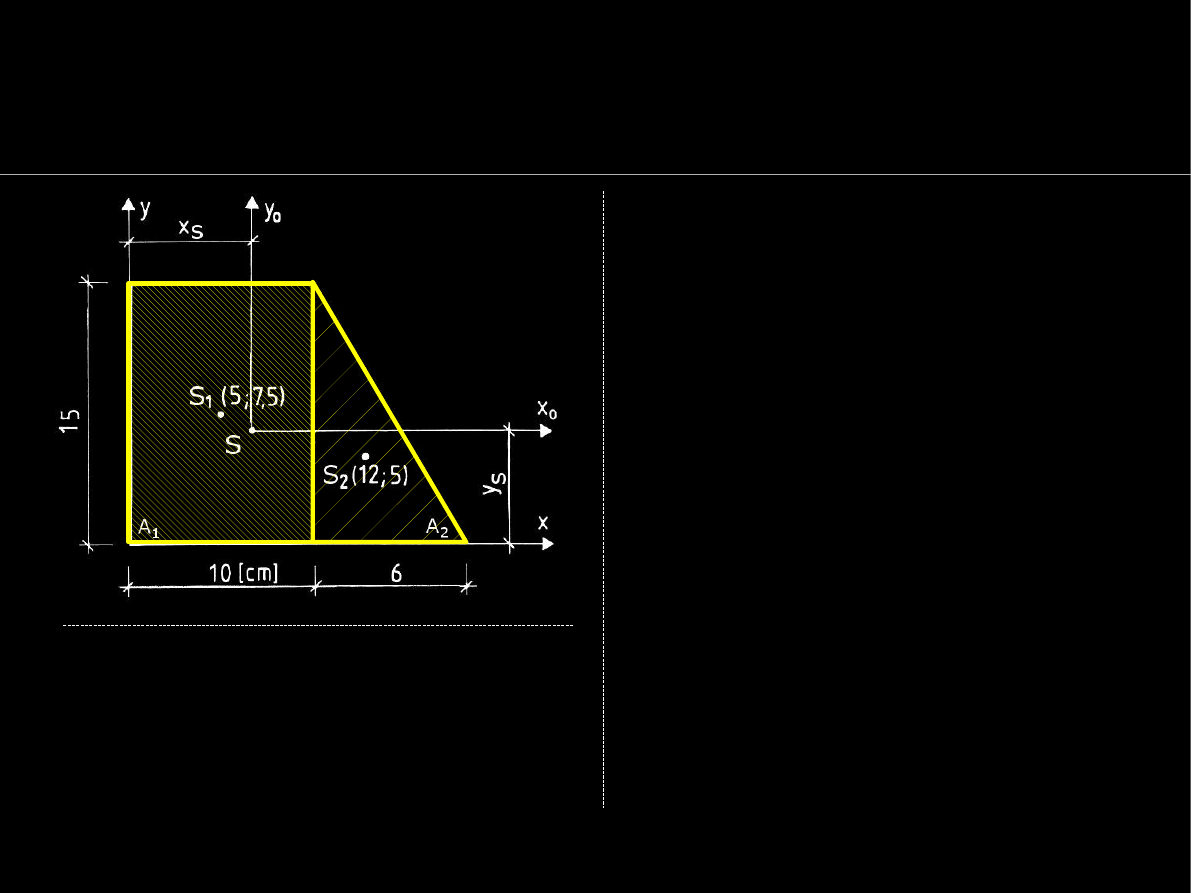
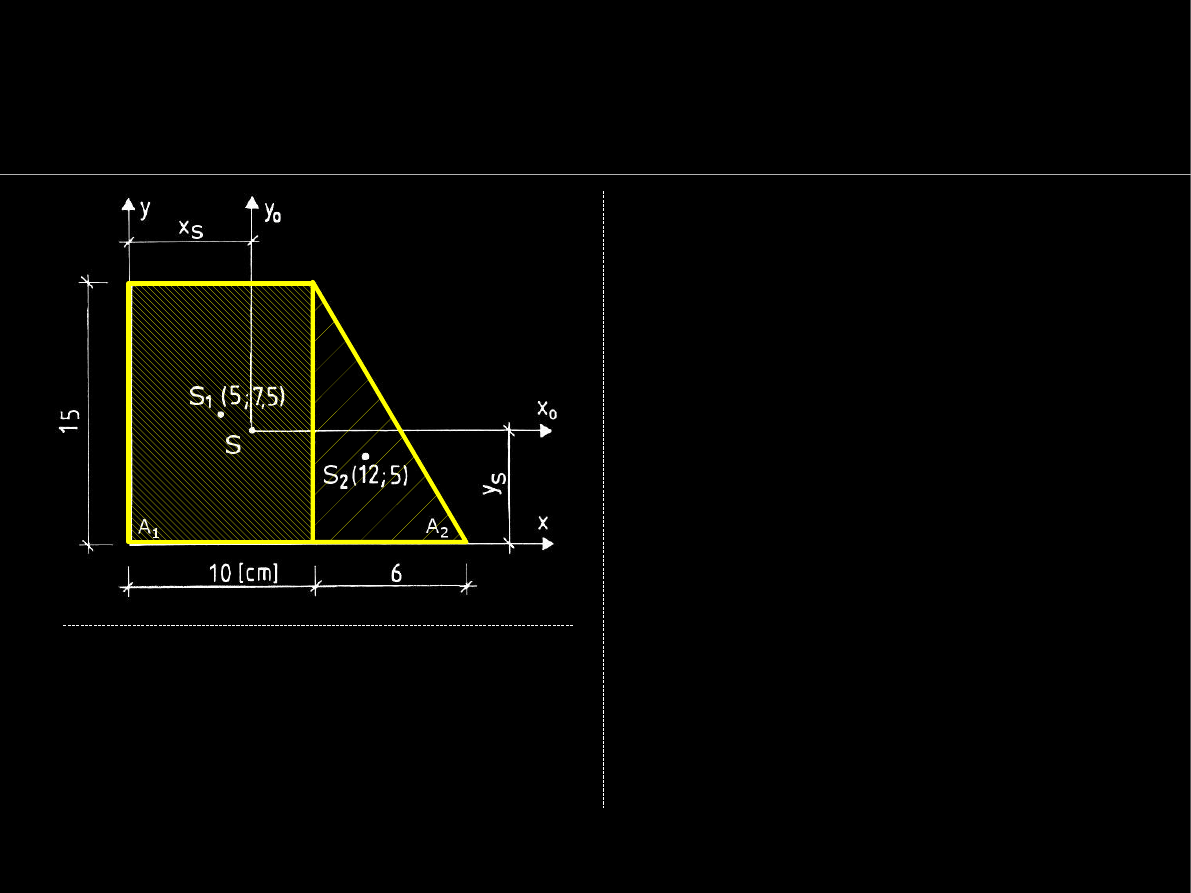
Podstawiając odpowiednie
wielkości do wzorów
otrzymamy
współrzędne
x
s
i
y
s
w układzie OXY:
x
s
=
S
y
A
=
A
1
x
1
A
2
x
2
A
1
A
2
=
150⋅545⋅12
15045
=
=
S
y
A
=
1290
195
=
6,62 cm
y
s
=
S
x
A
=
A
1
y
1
A
2
y
2
A
1
A
2
=
150⋅7,545⋅5
15045
=
=
S
x
A
=
1350
195
=
6,92 cm
Dobrze dobrany układ współrzędnych
upraszcza obliczenia, np :
y
s1
=
S
x
1
A
=
150⋅0−45⋅2,5
15045
=
−
112,5
195
=
=−
0,577cm
22.03.11
dr inż. Marek Bartoszek
14
Geometria mas
Pojęcie momentu bezwładności
W fizyce moment bezwładności
masy wykorzystywany jest
w analizie ciał obracających
się wokół osi.
Tak jak przyśpieszenie ciała
a
jest proporcjonalne do
przyłożonej siły
F
oraz
odwrotnie prop. do jego
masy
m
:
tak przyśp. kątowe
ε
jest prop.
do przyłożonego momentu
siły
M
i odwrotnie prop. do
momentu bezwładności
I
:
a=
F
m
=
M
I
M=F*r
M=I*
ε
22.03.11
dr inż. Marek Bartoszek
15
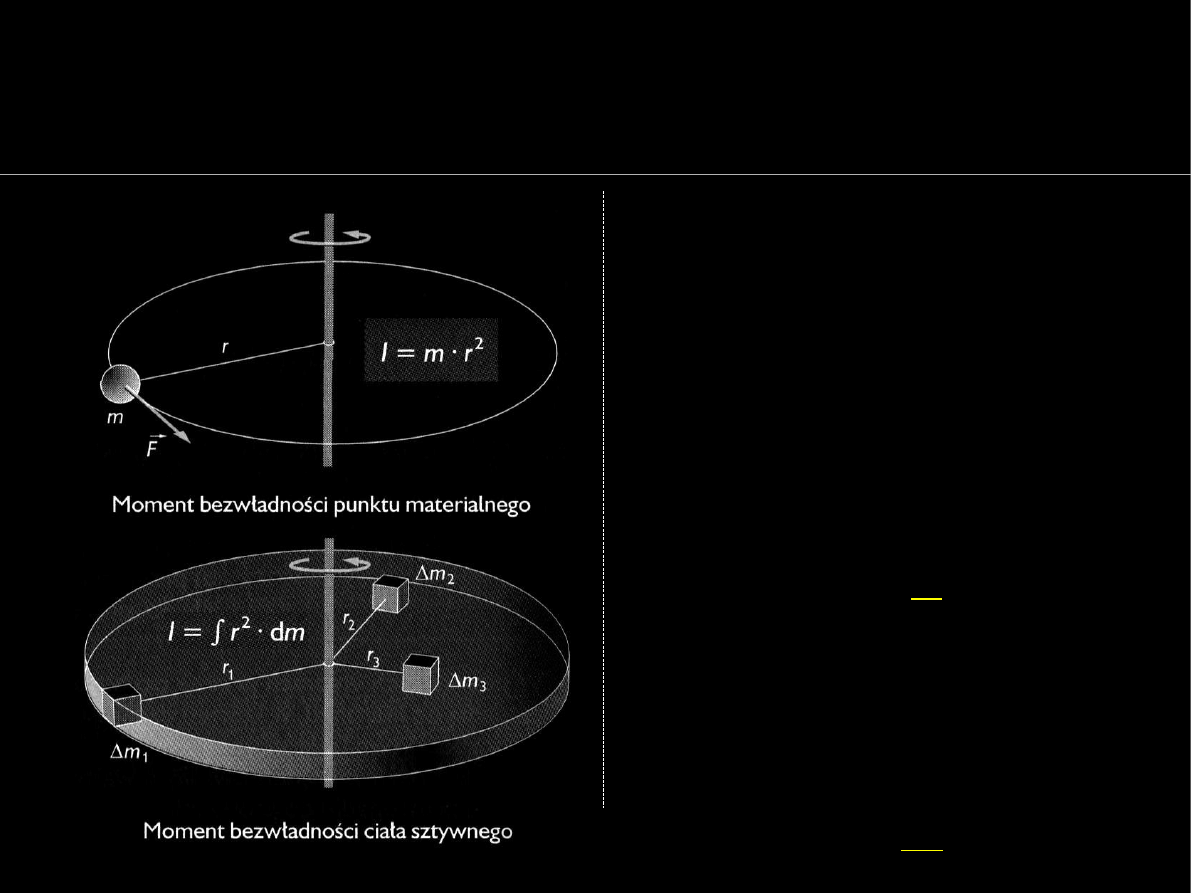
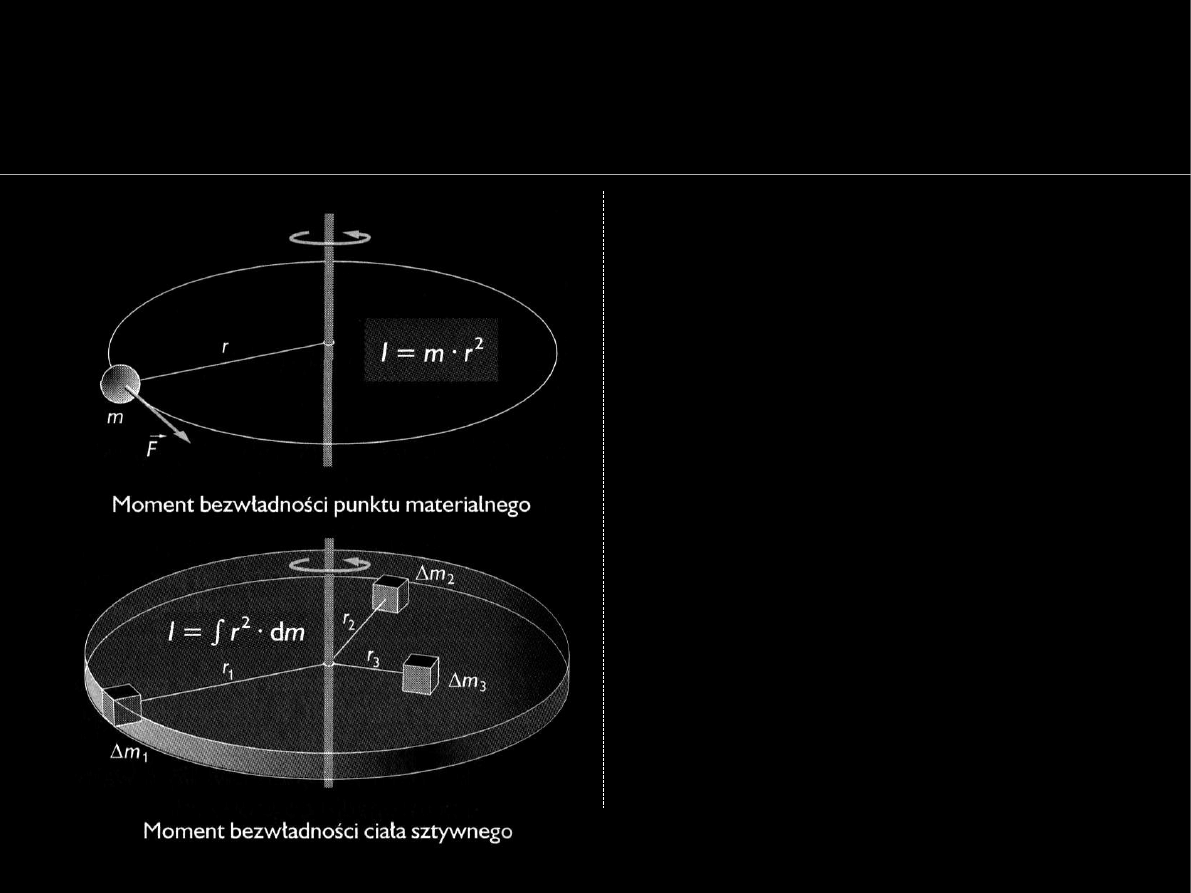
Geometria mas
Pojęcie momentu bezwładności
Moment bezwładności masy
m
to iloczyn tej masy i kwadratu
promienia
r
jej środka
ciężkości względem osi
obrotu:
Dla kilku mas
∆
m
i
wykonuje się
sumowanie odp. iloczynów:
a w przypadku ciągłego
obszaru całkowanie:
M=F*r
I =m⋅r
2
I =
∫
r
2
dm
I =
∑
i=1
n
r
i
2
∗
m
i
M=I*
ε
22.03.11
dr inż. Marek Bartoszek
16
Geometria mas
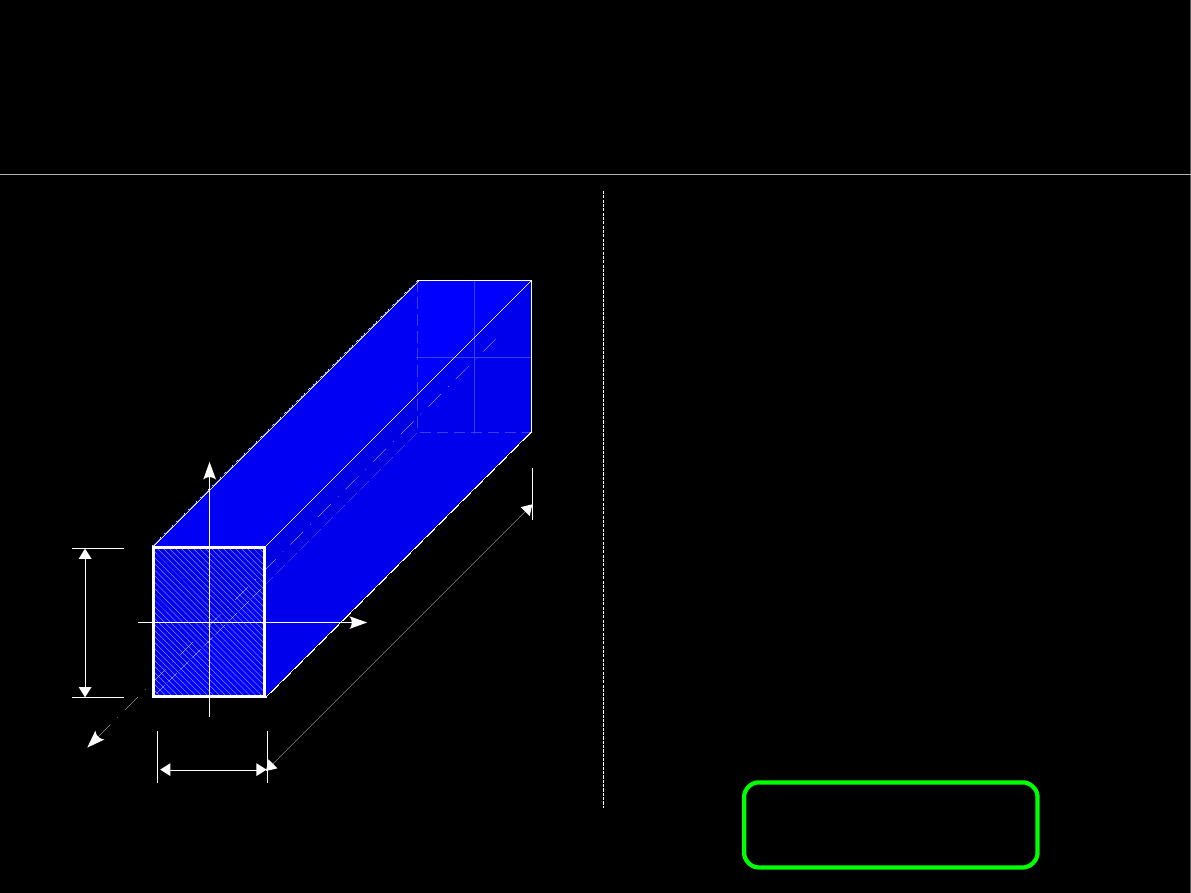
Pojęcie momentu bezwładności
Masa
pręta pryzmatycznego
to
iloczyn długości
L
pola,
stałego przekroju
A
i ciężaru
objętościowego
ρ
materiału:
Moment bezwładności pręta
I
jest wówczas proporcjonalny
do
momentu bezwładności
pola przekroju pręta
, np.
I
x
– wzgl. osi OX:
m=
ρ
*V=
ρ
*L*A
A=b*h
I =
∫
r
2
dm=
∫
r
2
d L A= L
∫
r
2
dA
I = L
∫
y
2
dA= L
∗
I
x
gdzie : I
x
=
∫
y
2
dA
b
h
y
x
z
L
22.03.11
dr inż. Marek Bartoszek
17
Geometria mas
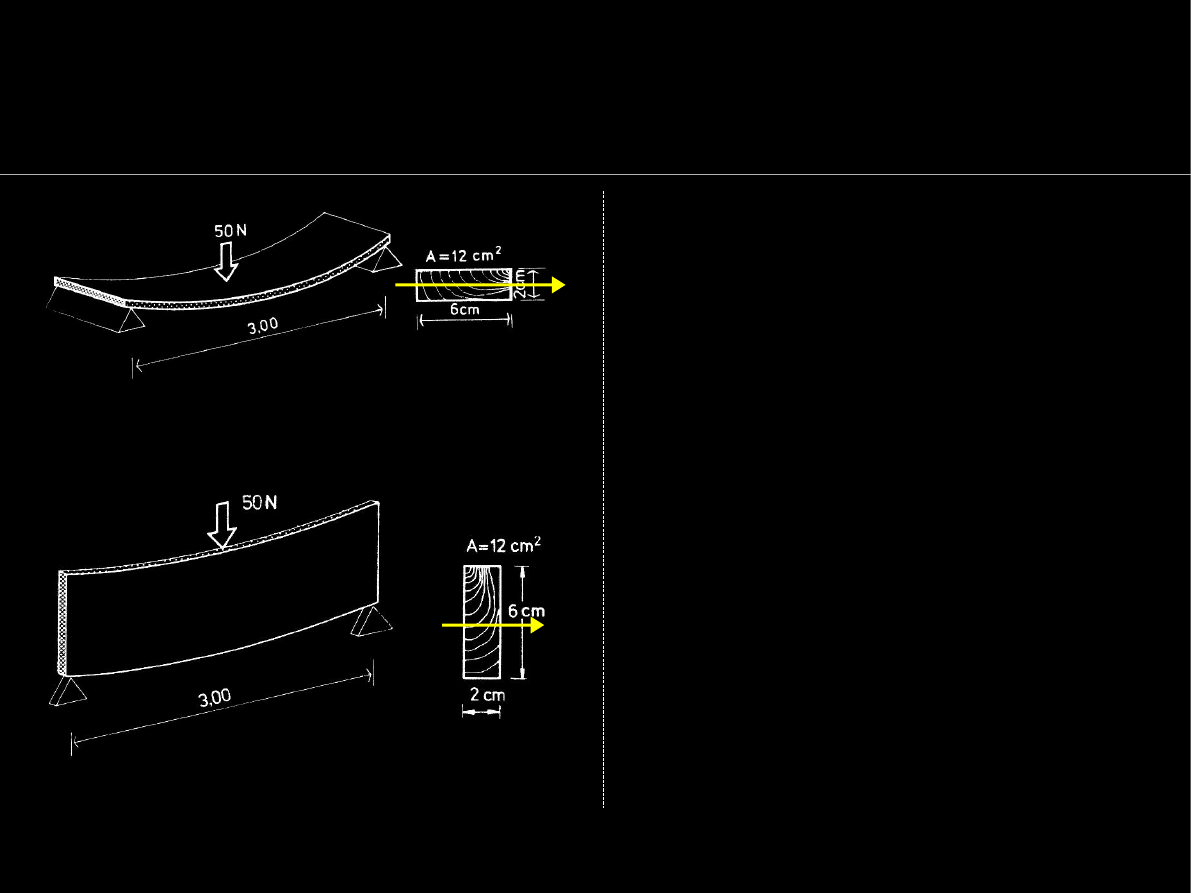
Znaczenie momentu bezwładności pola przekroju
Prostokątny przekrój deski ma
dwie osie symetrii, które
przyjmujemy jako osie OXY.
Momenty bezwładności
I
x
i
I
y
wyznaczone względem osi
symetrii prostokąta różnią się
– jeden jest mniejszy od
drugiego
I
x
<
I
y
.
Ugięcie deski
u
jest odwrotnie
proporcjonalne do momentu
bezwładności obliczonego
względem osi poziomej.
Moment dewiacji
w układzie współrz. OXY,
którego oś (jedna lub obie) jest osią
symetrii, jest zerowy:
D
xy
=0.
x
I
x
=4 cm
4
u
=7 cm
y
I
y
=36 cm
4
u
=0.8 cm
22.03.11
dr inż. Marek Bartoszek
18
Geometria mas
Momenty bezwładności i dewiacji pola przekroju
Moment bezwładności pola
A
przekroju pręta względem osi
układu OXY definiuje się
jako:
natomiast
moment dewiacji
pola
A
przekroju pręta
w układzie współrzędnych
OXY definiuje się:
I
x
=
∫
y
2
dA
oraz
I
y
=
∫
x
2
dA
I
xy
=
D
xy
=
∫
xy dA
Moment bezwładności
(
I
x
lub
I
y
) może być
tylko dodatni
(współrzędna w
kwadracie),
moment dewiacji
(
D
xy
)
może mieć
dowolny znak lub być równy
zeru
(iloczyn współrzędnych).
22.03.11
dr inż. Marek Bartoszek
19
Geometria mas
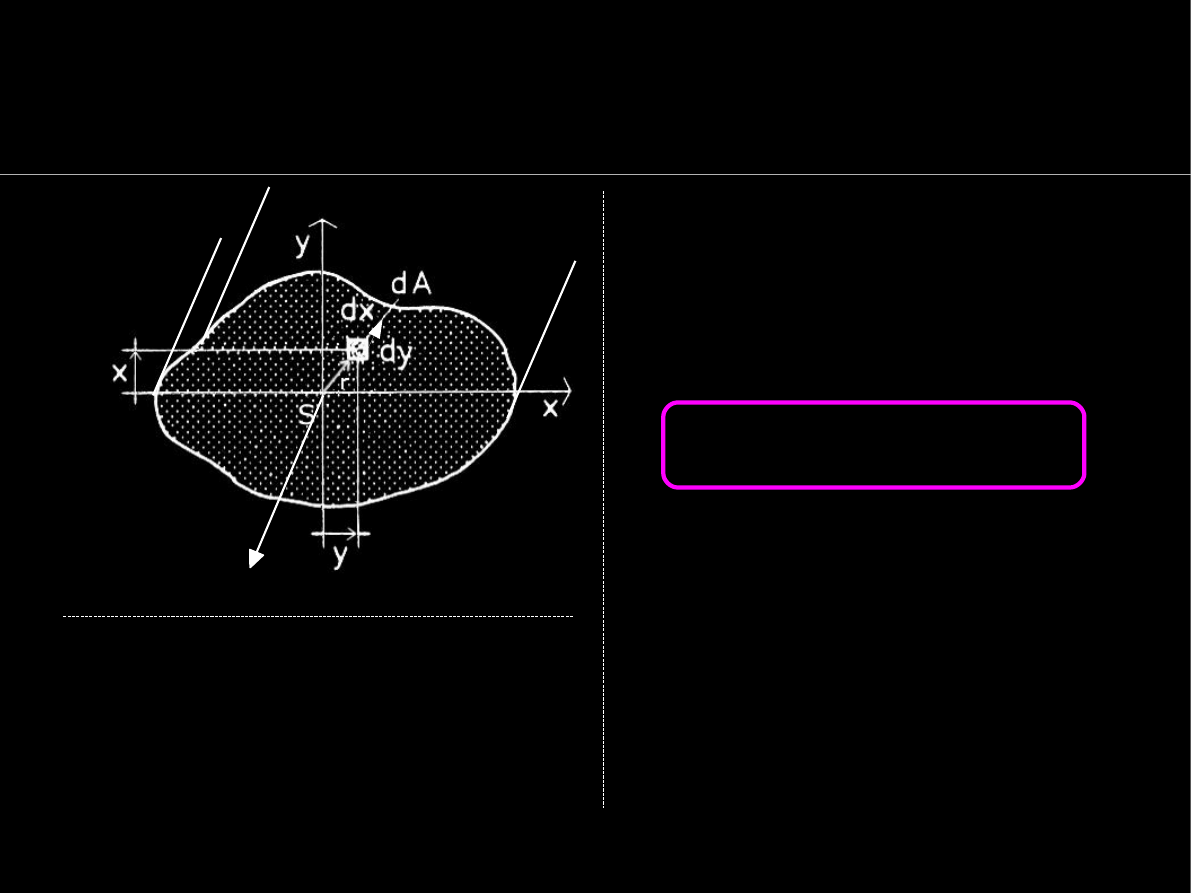
Biegunowy moment bezwładności pola przekroju
Biegunowy moment
bezwładności I
0
pola
przekroju pręta oblicza się
względem osi pręta OZ jako:
Biegunowy
moment
bezwładności
potrzebny jest
w przypadku elementów
prętowych skręcanych (wokół
osi pręta OZ) natomiast
momenty bezwładności
w
przypadku elementów
zginanych względem osi OX
lub OY.
I
0
=
∫
r
2
dA=
∫
x
2
y
2
dA
Biegunowy moment bezwładności
I
0
jest
wielkością
dodatnią, gdyż
promień r
jest nieujemny i w dodatku w drugiej
potędze.
z
22.03.11
dr inż. Marek Bartoszek
20
Geometria mas
Momenty bezwładności przekroju złożonego
Dla przekroju podzielonego na
figury proste
moment bezwł.
względem jakiejś osi
jest
równy
sumie momentów
bezwł.
figur składowych
obl.
względem tej samej osi
:
Podobnie
moment dewiacji
przekroju złożonego
względem osi układu OXY
jest
sumą momentów
dewiacji
figur składowych
obliczonych
w tym samym
układzie wsp
.:
I
x
=
∑
i
I
x
i
lub
I
y
=
∑
i
I
y
i
I
xy
=
D
xy
=
∑
i
D
x y
i
Moment bezwładności
(
I
x
lub
I
y
) może być
tylko dodatni.
Moment dewiacji
(
D
xy
) może mieć
dowolny znak lub być równy zeru.
22.03.11
dr inż. Marek Bartoszek
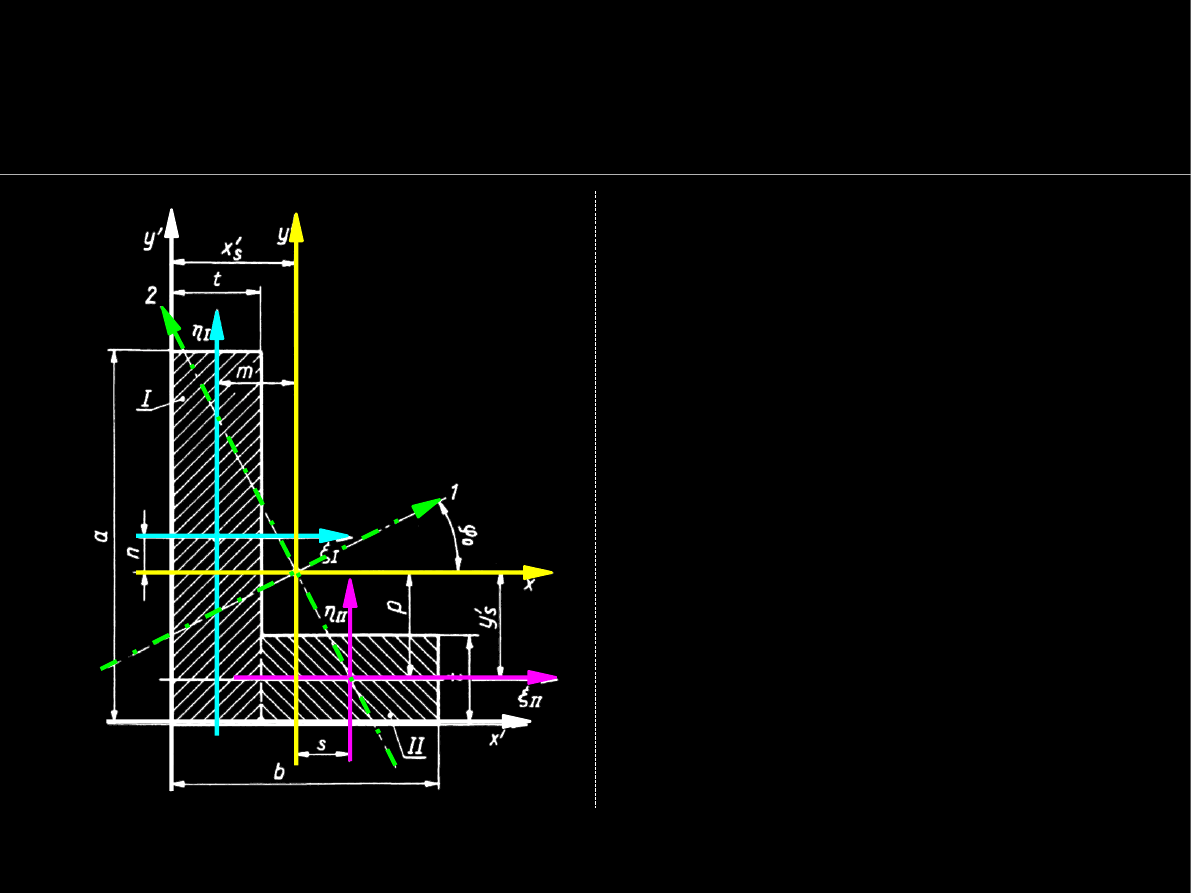
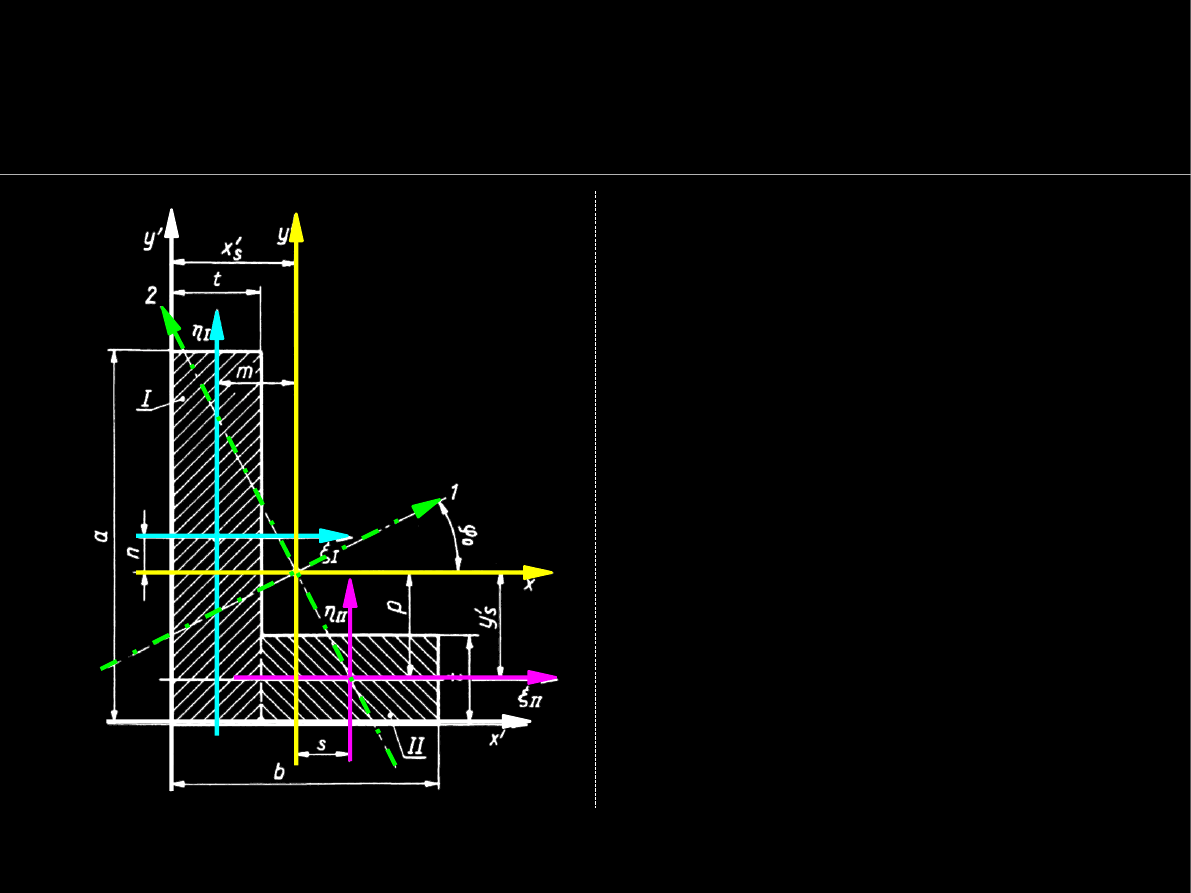
21
Geometria mas
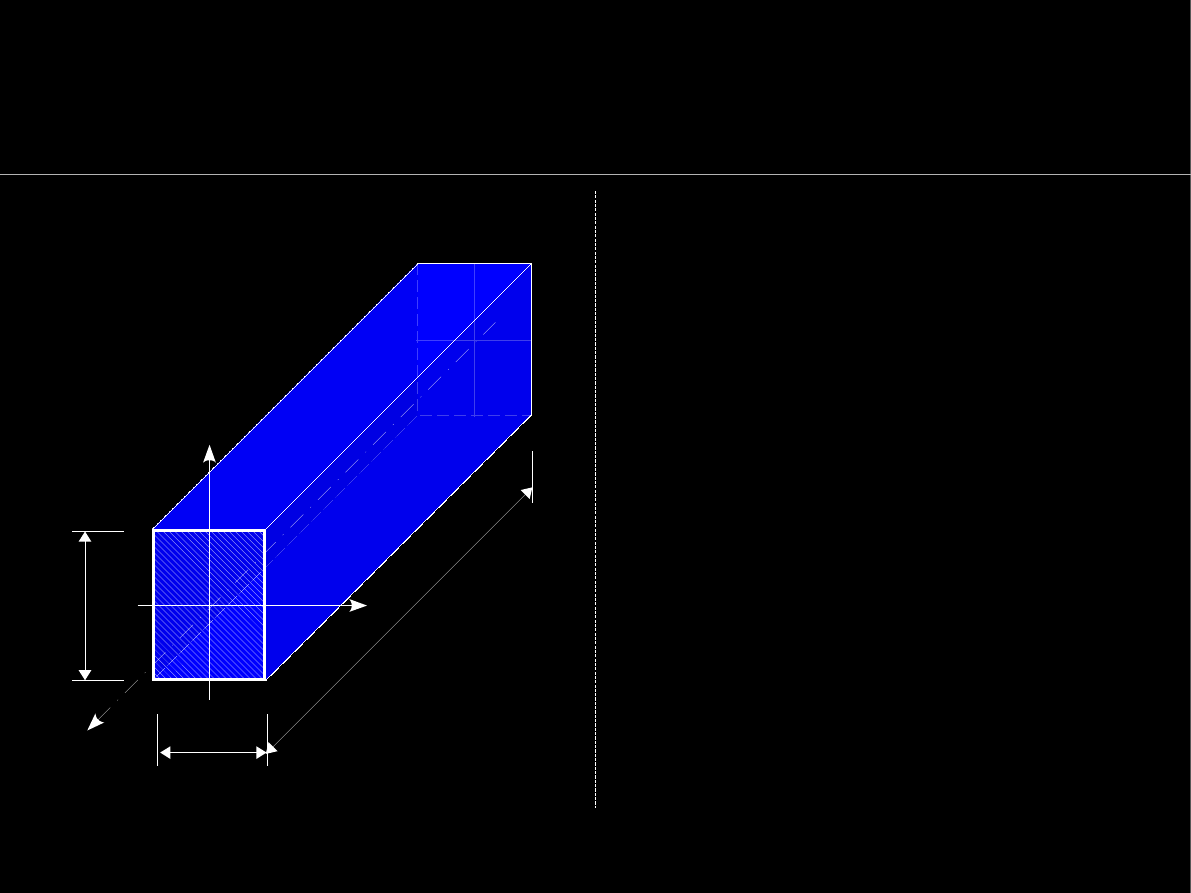
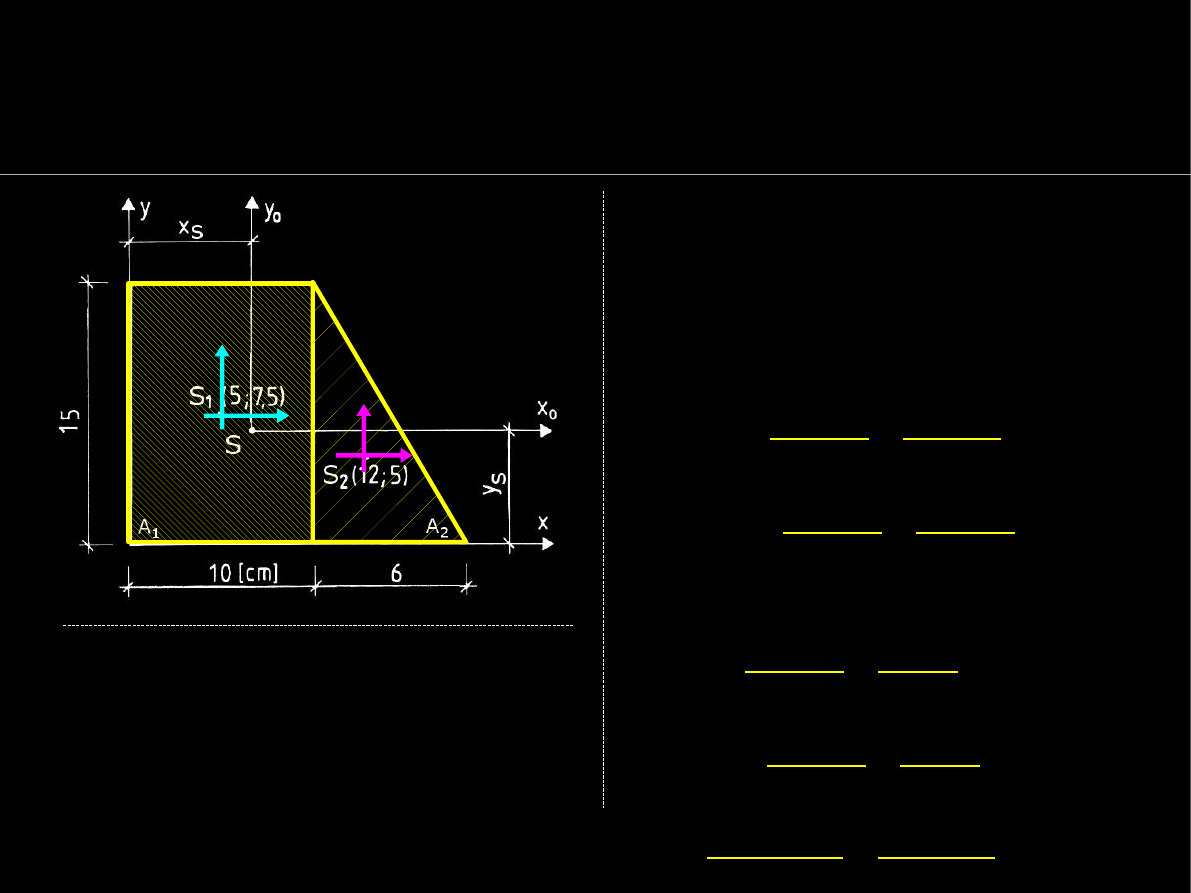
Układy współrzędnych w geometrii mas
Wykorzystuje się różne układy
współrzędnych – na rysunku
obok mamy pięć układów :
O
I
ξ
Ι
η
Ι
– centralny układ (i główny)
figury prostej I (lokalny figury I)
O
II
ξ
ΙΙ
η
ΙΙ
– centralny układ (i główny)
figury prostej II (lokalny figury II)
O'X'Y' – wyjściowy układ
współrzędnych do obliczeń
OXY – centralny układ całego
przekroju (globalny)
O12 – główny centralny układ całego
przekroju
(gł. centr. osie bezwładności)
I
II
Z. Dyląg i in. str.174 rys 8.12
22.03.11
dr inż. Marek Bartoszek
22
Geometria mas
Centralne układy współrzędnych
Centralny układ współrzędn.
ma początek
w środku
ciężkości figury
.
Główny centralny układ
współrzędnych
jest to
taki
układ centralny,
w którym
momenty bezwładności
przyjmują
ekstremalne dla
tego przekroju
wartości:
(
I
x
,
I
y
)==>(
I
min
,
I
max
)
a
moment dewiacji jest
równy zeru
D
xy
=0
.
Osią główną centralną
jest
zawsze
oś symetrii
figury.
22.03.11
dr inż. Marek Bartoszek
23
Geometria mas
Główny centralny układ współrzędnych
Do projektowania potrzebne są
główne centralne momenty
bezwładności
przekroju.
Najpierw wyznacza się
mom.
bezwł.
I
x
,
I
y
i
dewiacji D
xy
w układzie centralnym
.
Jeśli
D
xy
<>0
, to oblicza się kąt
α
o jaki należy obrócić
aktualny układ centralny
aby
otrzymać
układ główny
.
Następnie wyznacza się
centralne momenty bezwł.
w układzie głównym
:
I
min
i
I
max
.
Jeśli
D
xy
=0
, to aktualny układ centralny
jest jednocześnie układem głównym.
Jeśli oś układu centr. jest osią symetrii to
D
xy
=0
– i jest to jedna z osi głównych.
22.03.11
dr inż. Marek Bartoszek
24
Geometria mas
Główne centralne momenty bezwładności - wzory
Centralne momenty bezwł. i dewiacji:
I
x0
=3591.35 cm
4
,
I
y0
=3054.61 cm
4
,
D
x0y0
= -718.27 cm
4
=> D
xy
<>0.
Załóżmy, że :
●
znamy
centralne
momenty
bezwł. i dewiacji
przekroju:
I
x0
, I
y0
, D
x0y0
w układzie
SX
0
Y
0
.
●
jest to układ
centralny
ale
nie
główny
, gdyż
D
x0y0
<>0
.
Kąt obrotu
α
układu głównego
względem
centralnego
:
Gł. centr. momenty bezwł.:
tg 2=
−
2
D
x
0
y
0
I
x
0
−
I
y
0
I
max
min
=
1
2
I
x
0
I
y
0
±
1
2
I
x
0
−
I
y
0
2
4
D
x
0
y
0
2
22.03.11
dr inż. Marek Bartoszek
25
Geometria mas
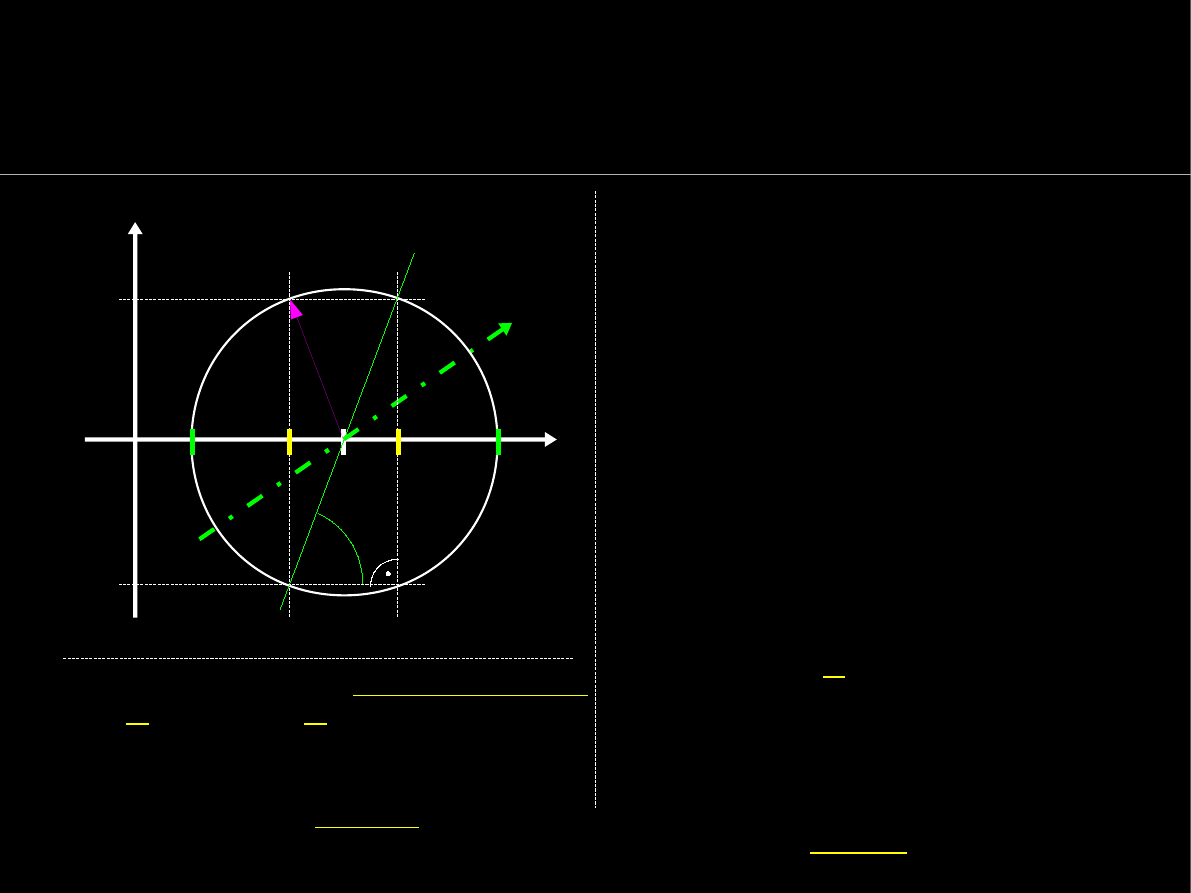
Interpretacja graficzna – koło Mohra
Momenty bezwł. i dewiacji
przekroju w układzie
centralnym
:
I
x
, I
y
i
D
xy
<>0.
Główne centr. momenty bezwł.
otrzymuje się w miejscach
przecięcia się koła Mohra z
osią poziomą OI.
Średnia arytmetyczna
I
x
i
I
y
jest
środkiem koła Mohra:
Promień koła oblicza się z
twierdzenia Pitagorasa:
tg 2=
−
2 D
xy
I
x
−
I
y
r
2
=
I
x
−
I
y
2
2
D
xy
2
I
max
s=
1
2
I
x
I
y
I
max
min
=
1
2
I
x
I
y
±
1
2
I
x
−
I
y
2
4 D
xy
2
I
D
D
xy
I
x
I
y
I
min
2
α
r
s
22.03.11
dr inż. Marek Bartoszek
26
Geometria mas
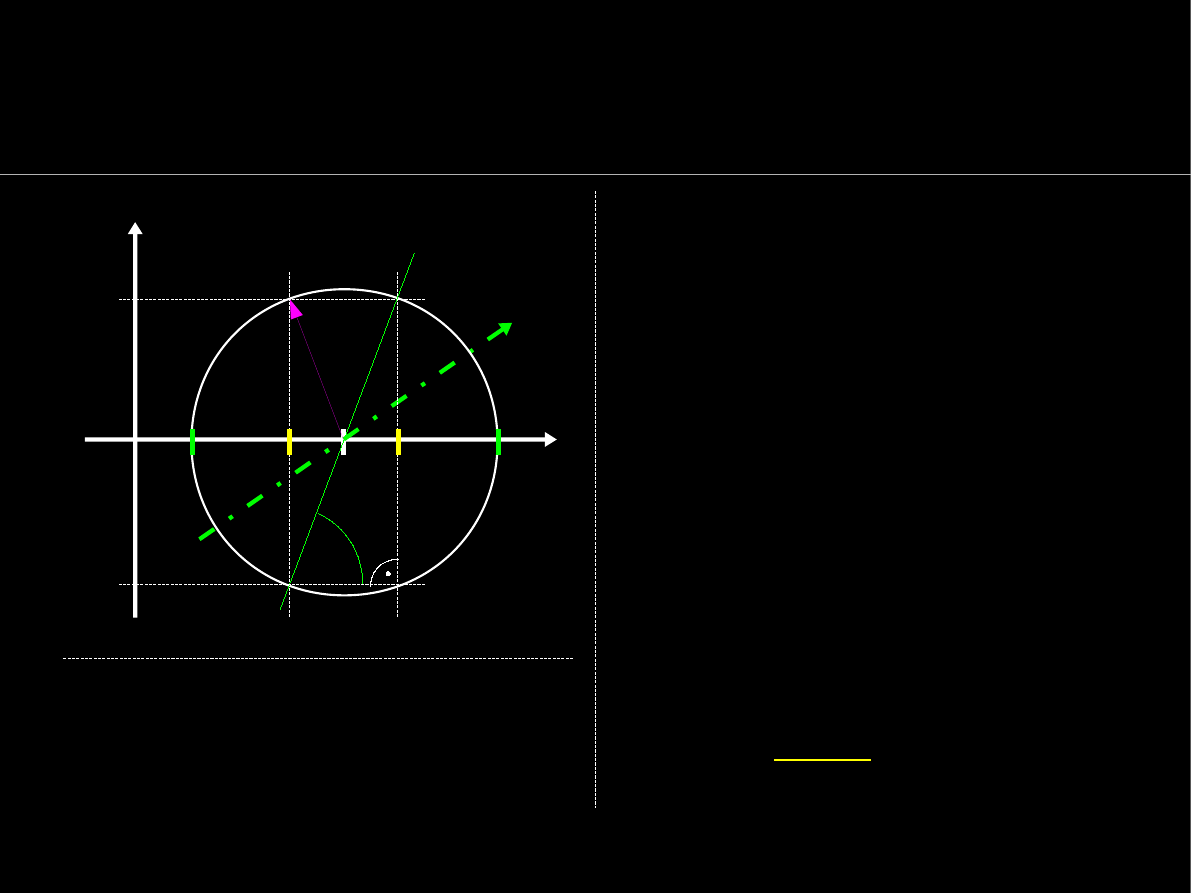
Interpretacja graficzna – koło Mohra
W miejscu przecięcia się koła
z osią OI zeruje się
moment
dewiacji D=0
,
a
główne
centralne momenty bezwł.
I
min
i
I
max
oblicza się:
co
odpowiada
Z proporcji boków 2
D
xy
do
I
y
-I
x
oblicza się tan(2
α
) kąta
α
o jaki należy obrócić
układ
centralny
aby był
głównym
:
D
xy
=0
<=>
α
=0
<=>
centr.
=
główny
I
D
D
xy
I
x
I
y
I
min
I
max
2
α
r
s
2 D
xy
I
y
−
I
x
=
tg 2
I
max
=
sr
oraz
I
min
=
s−r
Momenty bezwładności w układzie
centralnym
i obróconym
głównym
mają
tę samą średnią arytmetyczną
s
a więc
i sumę:
I
x0
+
I
y0
=
I
min
+
I
max
22.03.11
dr inż. Marek Bartoszek
27
Geometria mas
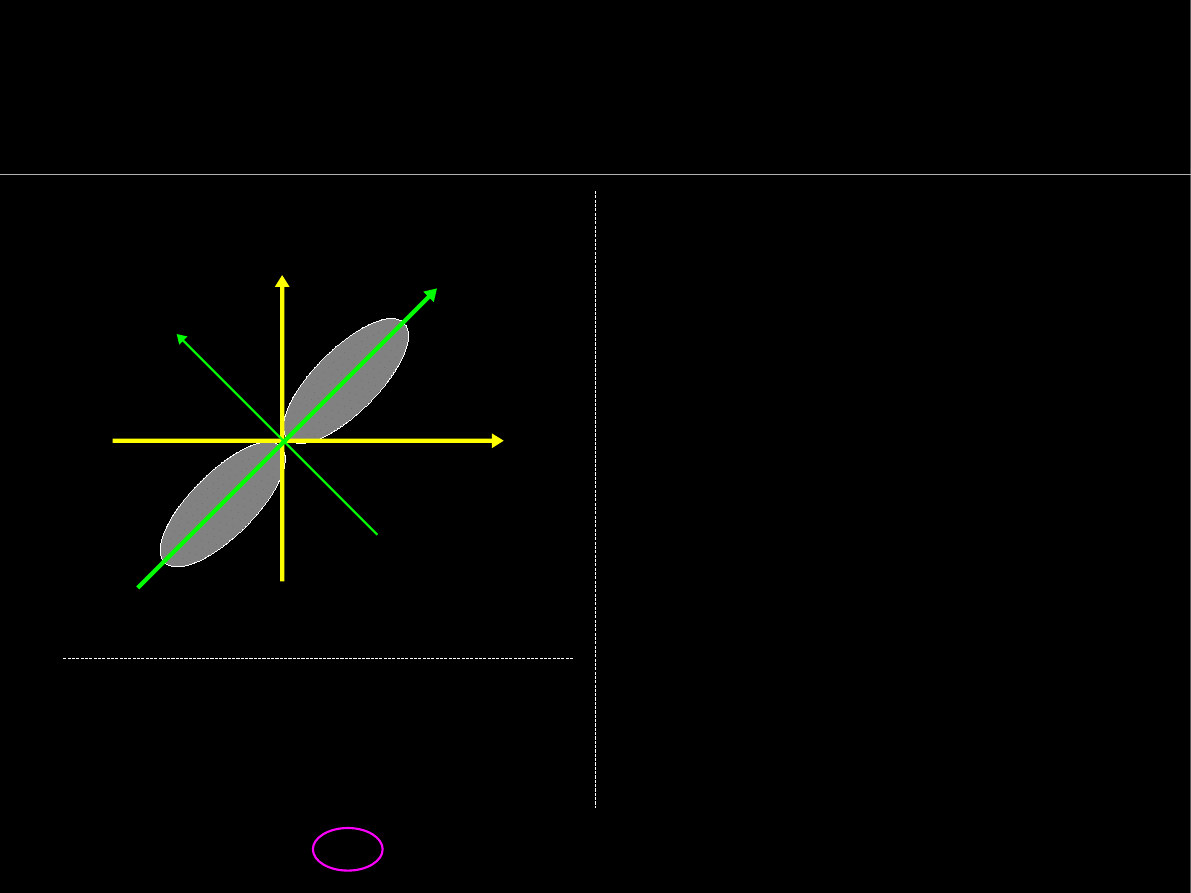
Główne centralne osie bezwładności
Podane wzory nie pozwalają
określić, względem której
z obróconych o kąt
α
osi
kładu głównego
otrzymamy
wartość
Ι
min
, a dla której
Ι
max
.
Poznaje się to po znaku
momentu dewiacji D
xy
:
D
xy
>0
=> większość masy leży
w ćwiartkach I i III i przez nie
przechodzi oś
I
min
D
xy
<0
=> oś
I
min
leży w II i IV
D
xy
=0
=>
ukł. centr
. =
główny
x
0
y
0
min
max
ćw.I
ćw.II
ćw.III
ćw.IV
D
x
0
y
0
=
∫
x y dA
Moment dewiacji informuje
o nierównomierności rozkładu „masy” w
przekroju, a jego znak zależy od
iloczynu x*y we wzorze:
D
x
0
y
0
0
22.03.11
dr inż. Marek Bartoszek
28
Geometria mas
Transformacja momentów bezwładności przy
obrocie układu o dowolny kąt
φ
Załóżmy, że mamy kąt
φ
o jaki
należy obrócić
układ
centralny,
np. do
układu
głównego
wg wzoru:
Transformujemy momenty
bezwładności z układu
centralnego SXY
do
obróconego o kąt
φ
układu
SX'Y'
(podręcznik S.Pyrak)
:
I
x '
=
I
x
0
⋅
cos
2
I
y
0
⋅
sin
2
−
D
x
0
y
2
⋅
sin2
I
y '
=
I
x
0
⋅
sin
2
I
y
0
⋅
cos
2
D
x
0
y
0
⋅
sin2
tg 2=
−
2 D
x
0
y
0
I
x
0
−
I
y
0
Momenty bezwładności w układzie
centralnym
i obróconym, (np.
głównym
)
mają tę samą średnią arytmetyczną
s
a więc i sumę:
I
x0
+
I
y0
=
I
min
+
I
max
φ
x'
y'
22.03.11
dr inż. Marek Bartoszek
29
Geometria mas
Momenty bezwładności względem osi
równoległych
Momenty bezwładności (lub
statyczne) pola można
dodawać ale tylko jeśli są
obliczone względem tych
samych osi:
Przykład wartości
I
x
[cm
4
] wzgl.
różnych osi na rysunku:
I
x
1
1
=
2812.5
Momenty bezwładności
figur składowych
można dodać tylko jeśli są obliczone
względem tej samej osi
– np.
względem osi OX
0
dla przekroju
powyżej :
y
0
x
0
x
2
y
2
y
1
x
1
I
x
0
1
=
2862.43
I
x
1
=
10001.85
I
x
2
2
=
562.5
I
x
0
2
=
1853.92
I
x
0
=
I
x
0
1
I
x
0
2
oraz
I
y
0
=
I
y
0
1
I
y
0
2
I
x
=
I
x
1
I
x
2
oraz
I
y
=
I
y
1
I
y
2
I
x
0
=
I
x
0
1
I
x
0
2
=
2862.431853.92
22.03.11
dr inż. Marek Bartoszek
30
Geometria mas
Transformacja momentów bezwł. przy
przesunięciu układu współ. – wzór Steinera
Do przeliczania momentów
bezwładności z układu OX
i
Y
i
do OXY służy
wzór Steiner'a
:
gdzie:
– to momenty
bezwł. względem osi układu
OX
i
Y
i
przech. przez środek
ciężkości figury
i
oraz
||
do
osi układu OXY,
– to współrzędne
środków cieżk. figury
i
Wzór Steinera wiąże momenty
bezwładności figury obliczone
względem osi centralnych, z
momentami OX
i
Y
i
bezwładności
obliczonymi względem osi do nich
równoległych, np. OX
0
Y
0
.
y
0
x
0
x
2
y
2
y
1
x
1
I
x
i
=
I
x
i
i
A
i
⋅
y
i
2
I
y
i
=
I
y
i
i
A
i
⋅
x
i
2
D
xy
i
=
D
x
i
y
i
i
A
i
⋅
x
i
⋅
y
i
I
x
i
i
, I
y
i
i
, D
x
i
y
i
i
x
i
, y
i
22.03.11
dr inż. Marek Bartoszek
31
Geometria mas
Momenty bezwładności - przykład
Momenty bezwł. i dewiacji
z układów lokalnych
przeliczamy do układu
centralnego SXY za pomocą
wz. Steiner'a, np.:
Suma momentów bezwładności
figur skład. np. wzgl. osi OX
to
centr. moment bezwł. I
x
:
Moment bezwładności
(
I
x
lub
I
y
) może być
tylko dodatni.
Moment dewiacji
(
D
xy
) może mieć
dowolny znak lub być równy zeru.
I
x
1
=
I
x
1
1
A
1
⋅
y
0
1
2
=
2812,5
150⋅7,5− y
s
2
=
2862,43 cm
4
I
x
2
=
I
x
2
2
A
2
⋅
y
0
2
2
=
562,5
45⋅5− y
s
2
=
728,92 cm
4
I
x
=
I
x
1
I
x
2
=
2862,43728,92=
=
3591,35 cm
4
22.03.11
dr inż. Marek Bartoszek
32
Geometria mas
Momenty bezwładności - przykład
Podobnie przeliczymy (Steiner)
pozostałe
momenty bezwł.
I
(i)
yi
do centralnego układu
OXY całego przekroju :
następnie obliczymy
centralny
moment bezwładności
całego
przekroju względem osi OY:
Moment bezwładności
(
I
x
lub
I
y
) może być
tylko dodatni.
Moment dewiacji
(
D
xy
) może mieć
dowolny znak lub być równy zeru.
I
y
1
=
I
y
1
1
A
1
⋅
x
0
1
2
=
1250
150⋅5−x
s
2
=
1804,73cm
4
I
y
2
=
I
y
2
2
A
2
⋅
x
0
2
2
=
90
45⋅12−x
s
2
=
1249,88 cm
4
I
y
=
I
y
1
I
y
2
=
1804,731249,88=
=
3054.61 cm
4
22.03.11
dr inż. Marek Bartoszek
33
Geometria mas
Moment dewiacji - przykład
Ostatecznie te same operacje
wykonamy dla
momentów
dewiacji D
(i)
xiyi
(w.Steiner'a) :
następnie obliczymy
centralny
moment bezwładności
całego
przekroju względem osi OY:
Moment bezwładności
(
I
x
lub
I
y
) może być
tylko dodatni.
Moment dewiacji
(
D
xy
) może mieć
dowolny znak lub być równy zeru.
D
xy
1
=
D
x
1
y
1
1
A
1
⋅
x
0
1
y
1
0
=
0
150⋅5− x
s
7,5− y
s
=−
166,42 cm
4
D
xy
2
=
I
x
2
y
2
2
A
2
⋅
x
0
2
y
2
0
=−
112,5
45⋅12−x
s
5− y
s
=−
551,85 cm
4
D
xy
=
D
xy
1
D
xy
2
=−
166,42−551,85=
=−
718,27 cm
4
22.03.11
dr inż. Marek Bartoszek
34
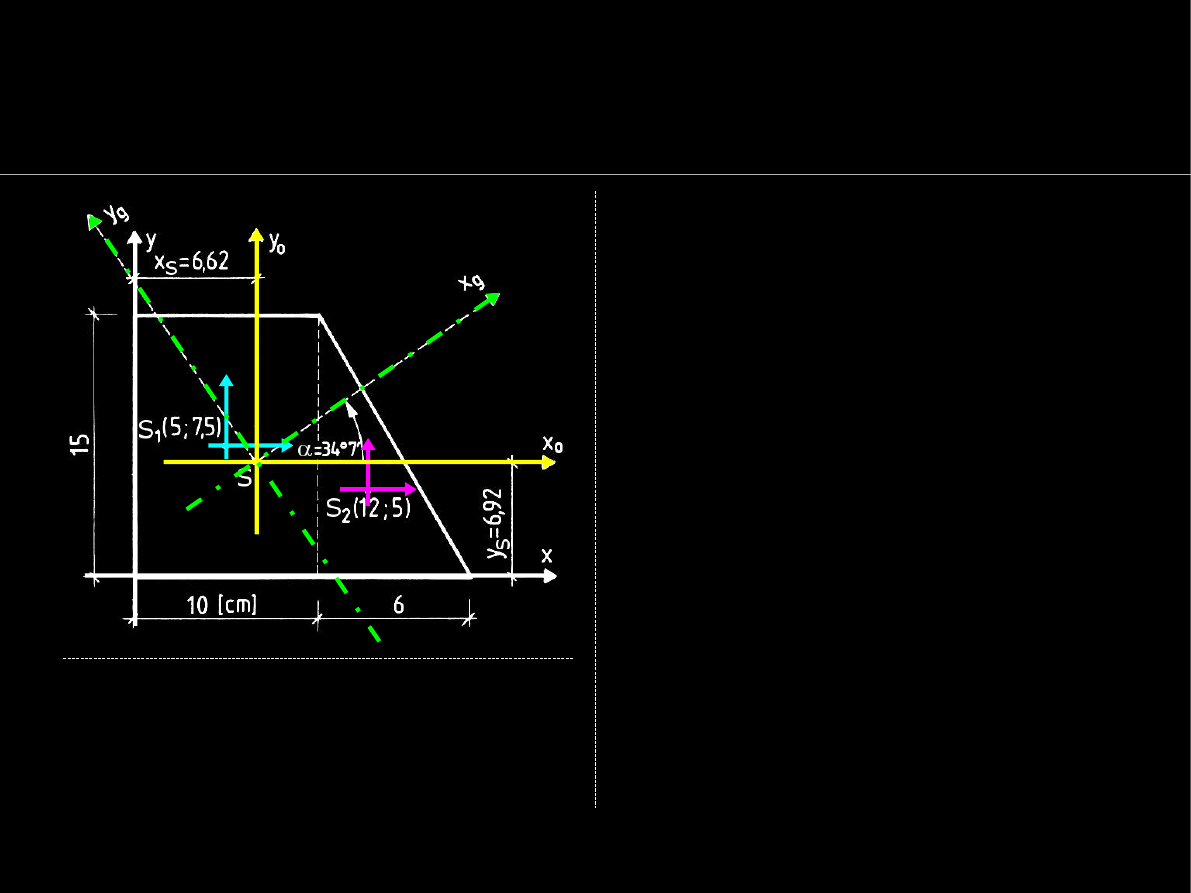
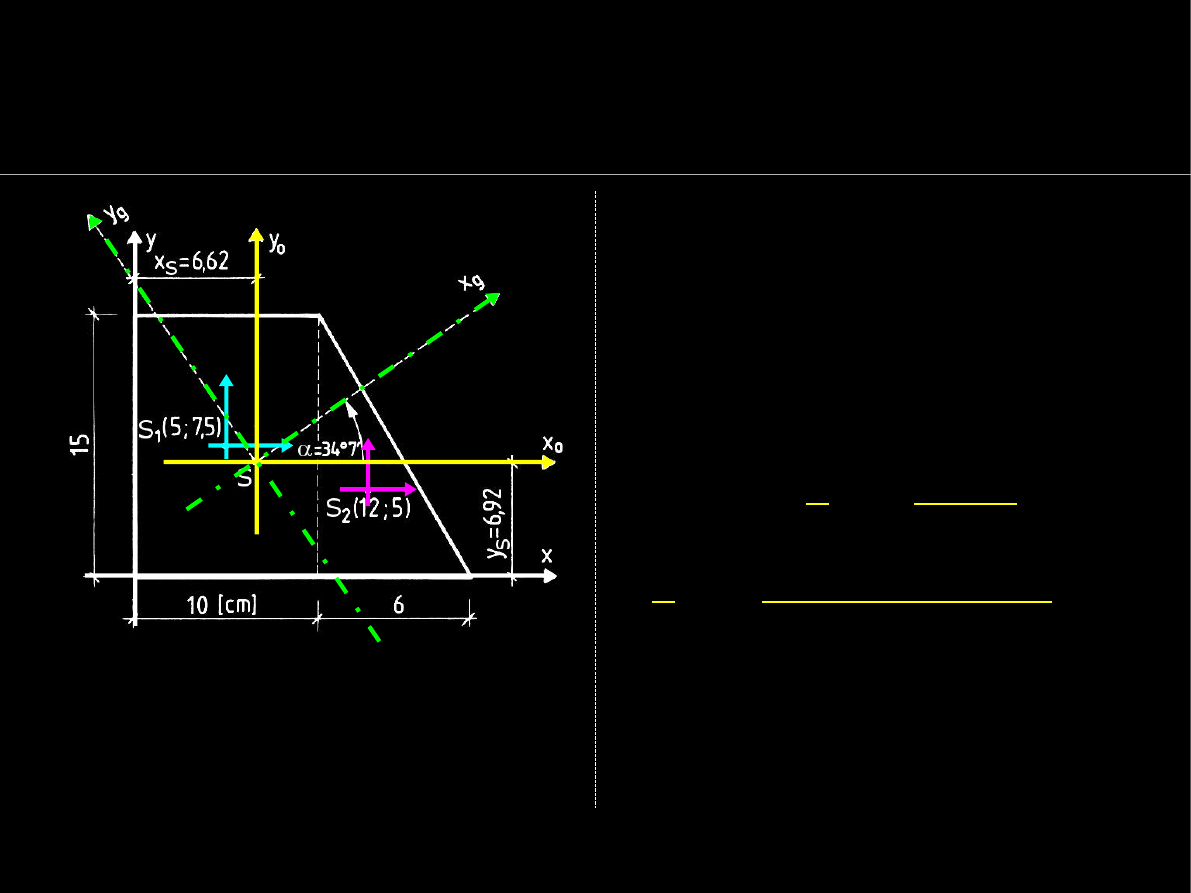
Geometria mas
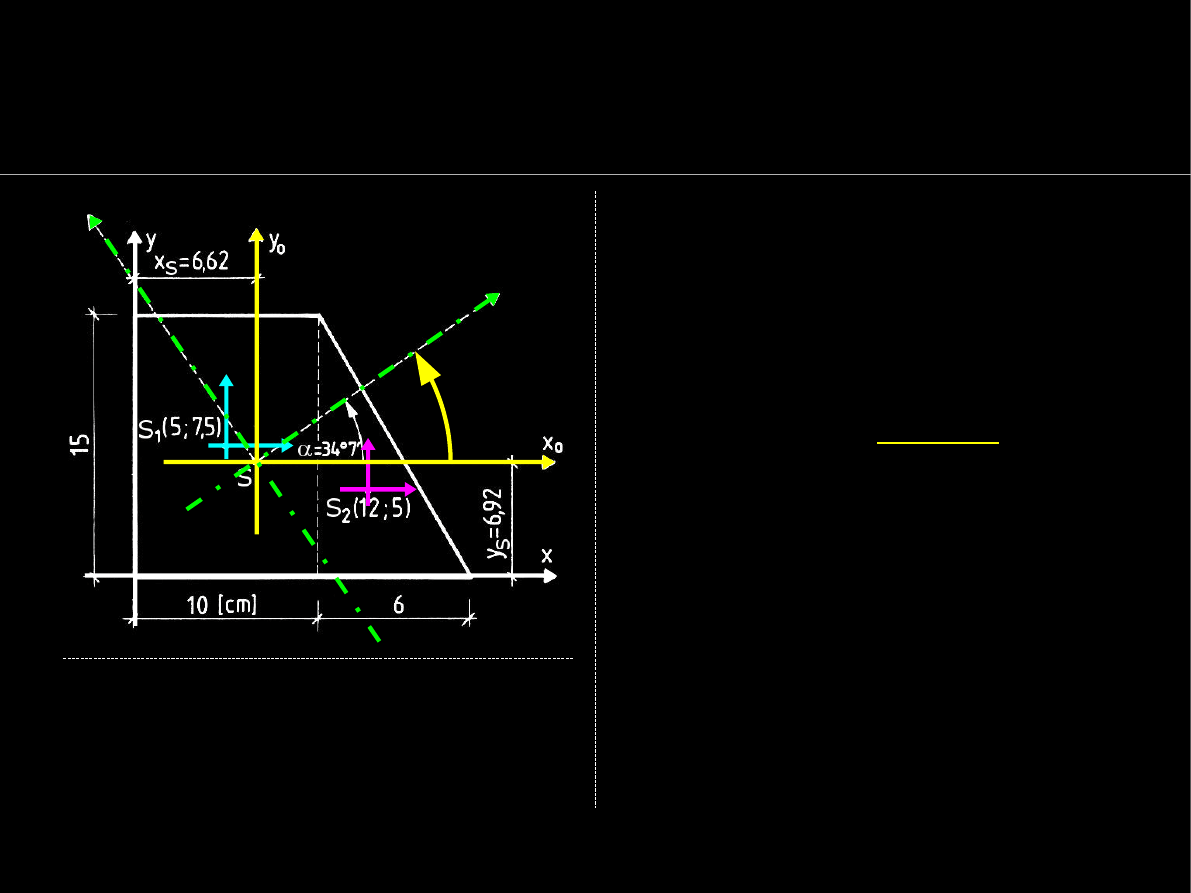
Główne centralne momenty bezwł. - przykład
Na podstawie c
entralnych
momentów bezwł. i dewiacji
I
x
, I
y
, D
xy
obliczamy kąt
α
obrotu
układu głównego
względem
centralnego
:
a następnie ...
Centralne momenty bezwł. i dewiacji:
I
x
=3591.35 cm
4
,
I
y
=3054.61 cm
4
,
D
xy
= -718.27 cm
4
=> D
xy
<0.
=
1
2
atan
−
2 D
xy
I
x
−
I
y
=
=
1
2
atan
−
2⋅−718,27
3591,35−3054,61
=
34 ° 7'
22.03.11
dr inż. Marek Bartoszek
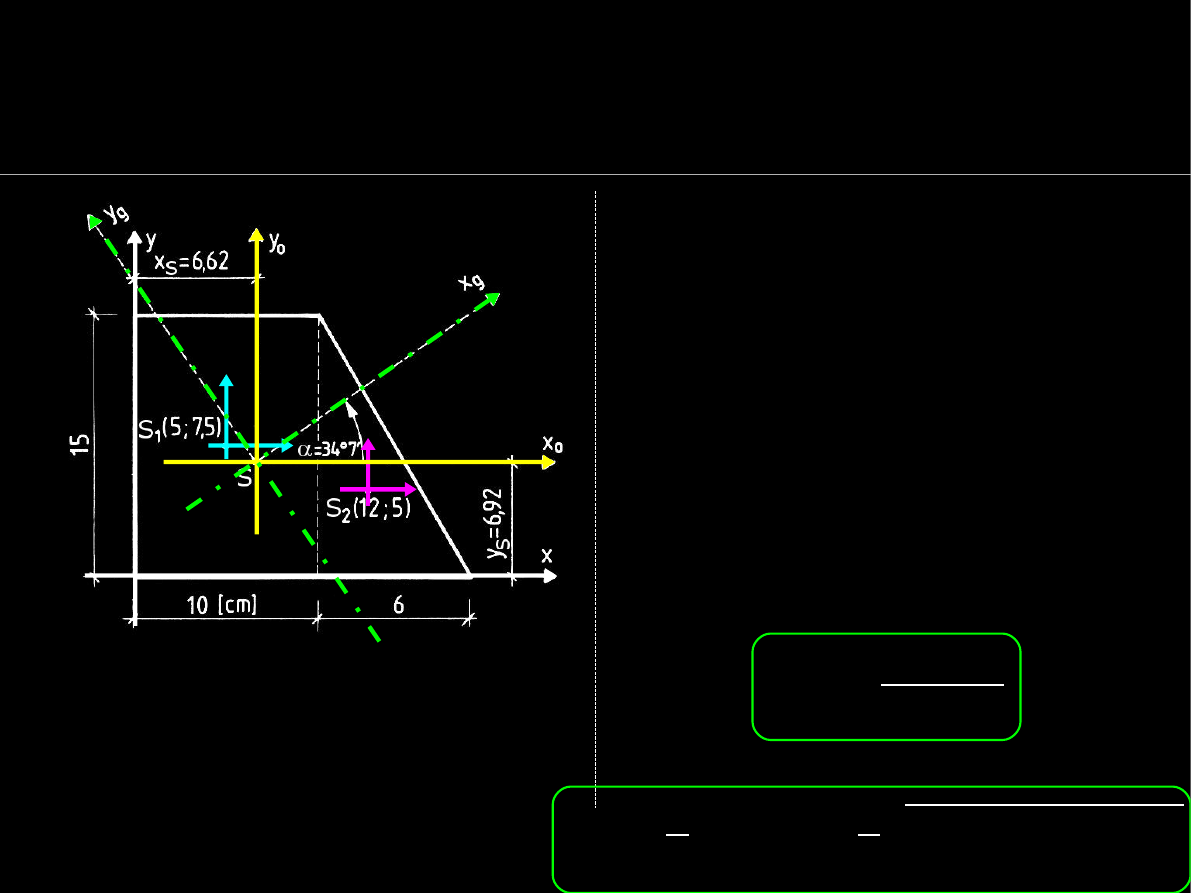
35
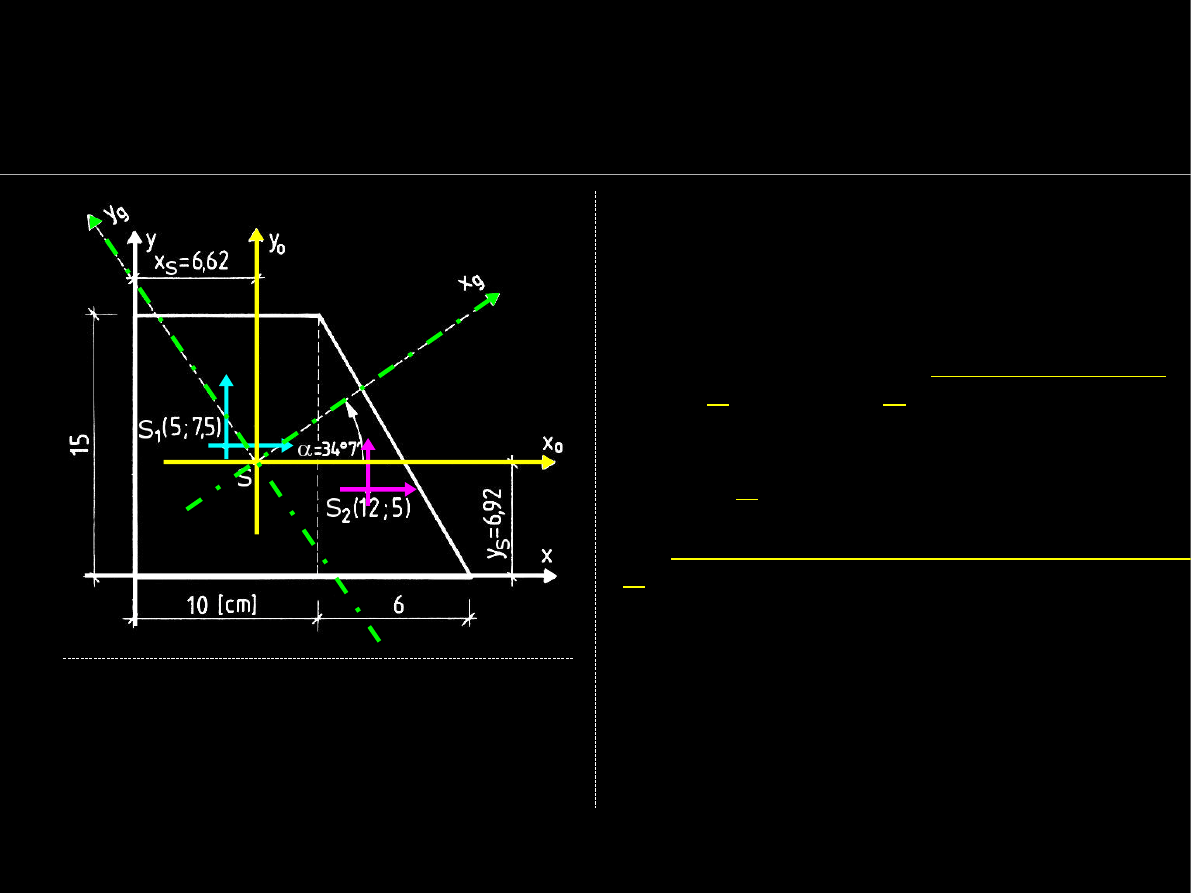
Geometria mas
Główne centralne momenty bezwł. - przykład
następnie z
I
x
, I
y
, D
xy
obliczamy
główne centralne momenty
bezwładności
przekroju:
Oznaczyć osie
I
min
i
I
max
;
Dxy<0
Centralne momenty bezwł. i dewiacji:
I
x
=3591.35 cm
4
,
I
y
=3054.61 cm
4
,
D
xy
= -718.27 cm
4
=> D
xy
<0.
I
max
min
=
1
2
I
x
I
y
±
1
2
I
x
−
I
y
2
4 D
xy
2
=
1
2
3591.353054.61±
±
1
2
3591.35−3054.61
2
4⋅−718.27
2
=
3322,98±766,77
I
max
=
3322,98766,77=4089,75cm
4
I
min
=
3322,98−766,77=2556,21cm
4
I
max
I
min
D
xy
<0
22.03.11
dr inż. Marek Bartoszek
36
Geometria mas
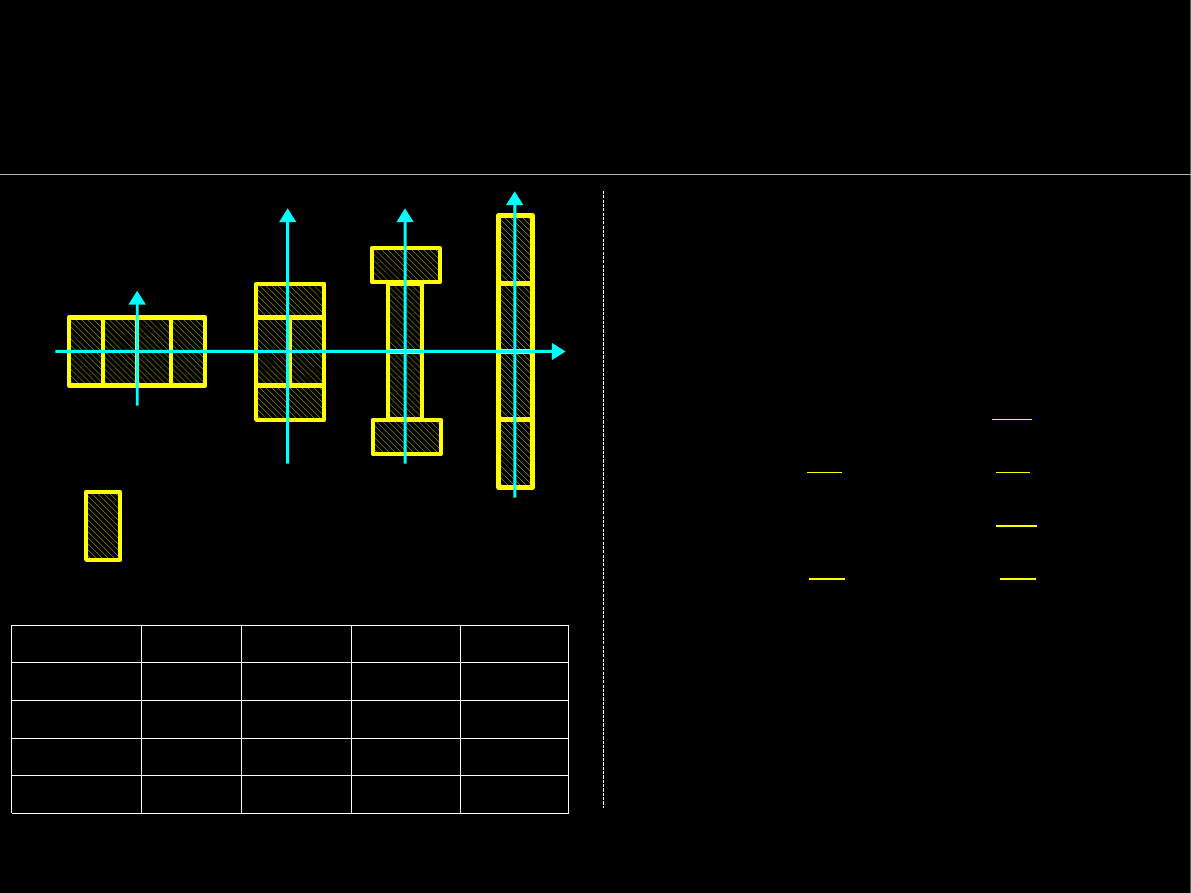
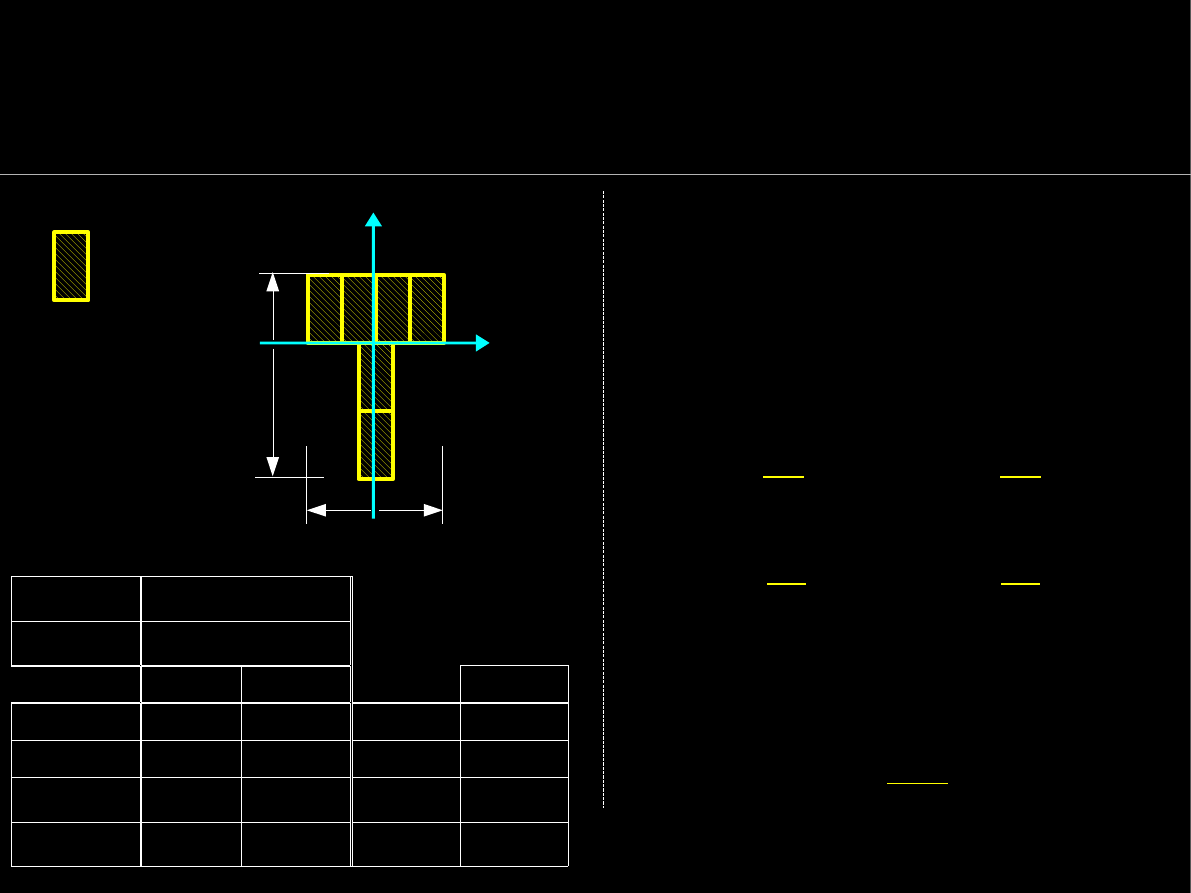
Promienie bezwładności przekroju
Mając
pole powierzchni A
całego przekroju oraz jego
momenty bezwładności
I
x
,
I
y
można obliczyć
promienie
bezwładności i
x
i
i
y
:
Promienie bezwładności
są
miarą tego jak daleko od
danej osi jest rozłożone pole
przekroju – jak duży jest
moment bezwładności
I
x
i
I
y
w stosunku
do pola pow.
A
.
y
x
i
x
2
=
I
x
A
⇒
i
x
=
I
x
A
i
y
2
=
I
y
A
⇒
i
y
=
I
y
A
4A=32 cm
2
A [cm2]
32
32
32
32
42,67 170,67 490,67 682,67
ix2 [cm2] 1,33
5,33
15,33 21,33
1,15
2,31
3,92
4,62
170,67 42,67 26,67 10,67
Ix [cm4]
ix [cm]
Iy [cm4]
A
A=8 cm
2
4
2 cm
22.03.11
dr inż. Marek Bartoszek
37
Geometria mas
Wskaźniki zginania przekroju
Mając
momenty bezwładności
I
x
, I
y
i współrzędne środka
ciężkości przekroju można
obliczyć
wskaźniki zginania
W
x
i
W
y
:
Często znaczenie mają
wskaźniki o najmniejszej
wartości bezwzględnej:
W
x
=
I
x
y
oraz
W
x
−
=
I
x
y
−
W
y
−
=
I
y
x
−
oraz
W
y
=
I
y
x
A=8 cm
2
A
4
2 cm
y
x
x
+
x
-
y
–
y
+
512
176
-
+
extr
x [cm]
-4
4
max|x|
4
y [cm]
-8
4
max|y|
8
-64
128
64
-44
44
44
I
x
[cm
4
]
I
y
[cm
4
]
W
x
[cm
3
]
W
x
min
W
y
[cm
3
]
W
y
min
W
x
min
=
I
x
y
extr
=
∣
W
x
∣
W
y
min
=
W
y
=
∣
W
y
−
∣
22.03.11
dr inż. Marek Bartoszek
38
DZIEKUJĘ ZA UWAGĘ
KONIEC wykładu
Document Outline
- Slajd 1
- Slajd 2
- Slajd 3
- Slajd 4
- Slajd 5
- Slajd 6
- Slajd 7
- Slajd 8
- Slajd 9
- Slajd 10
- Slajd 11
- Slajd 12
- Slajd 13
- Slajd 14
- Slajd 15
- Slajd 16
- Slajd 17
- Slajd 18
- Slajd 19
- Slajd 20
- Slajd 21
- Slajd 22
- Slajd 23
- Slajd 24
- Slajd 25
- Slajd 26
- Slajd 27
- Slajd 28
- Slajd 29
- Slajd 30
- Slajd 31
- Slajd 32
- Slajd 33
- Slajd 34
- Slajd 35
- Slajd 36
- Slajd 37
- Slajd 38
Wyszukiwarka
Podobne podstrony:
4OS 2011 w5 id 39385 Nieznany
kolokwium II semestr geometria mas rozwiązania
kolokwium II semestr geometria mas 2 poprawa, Budownictwo, Inżynierka, Budownictwo, Semestr 1-2, gm,
Arch 2011 W2 Warunki równowagi Reakacje
Arch 2011 W4 Warunki równowagi Siły wewnętrzne
kolokwium II semestr geometria mas 6 poprawa, Budownictwo, Inżynierka, Budownictwo, Semestr 1-2, gm,
kolokwium II semestr geometria mas 3 poprawa, Budownictwo, Inżynierka, Budownictwo, Semestr 1-2, gm,
kolokwium II semestr geometria mas 4 poprawa, Budownictwo, Inżynierka, Budownictwo, Semestr 1-2, gm,
kolokwium II semestr geometria mas 1 poprawa, Budownictwo, Inżynierka, Budownictwo, Semestr 1-2, gm,
Mechanika techniczna Geometria mas
geometria mas
Mechanika ogólna Geometria Mas momenty bezwładności mgr Perek
Plaska Geometria Mas id 343726 Nieznany
4 Geometria mas
Geometria mas nowy
więcej podobnych podstron