PŁASKA GEOMETRIA MAS
Środek ciężkości figury płaskiej
Momentami statycznymi M
x
i M
y
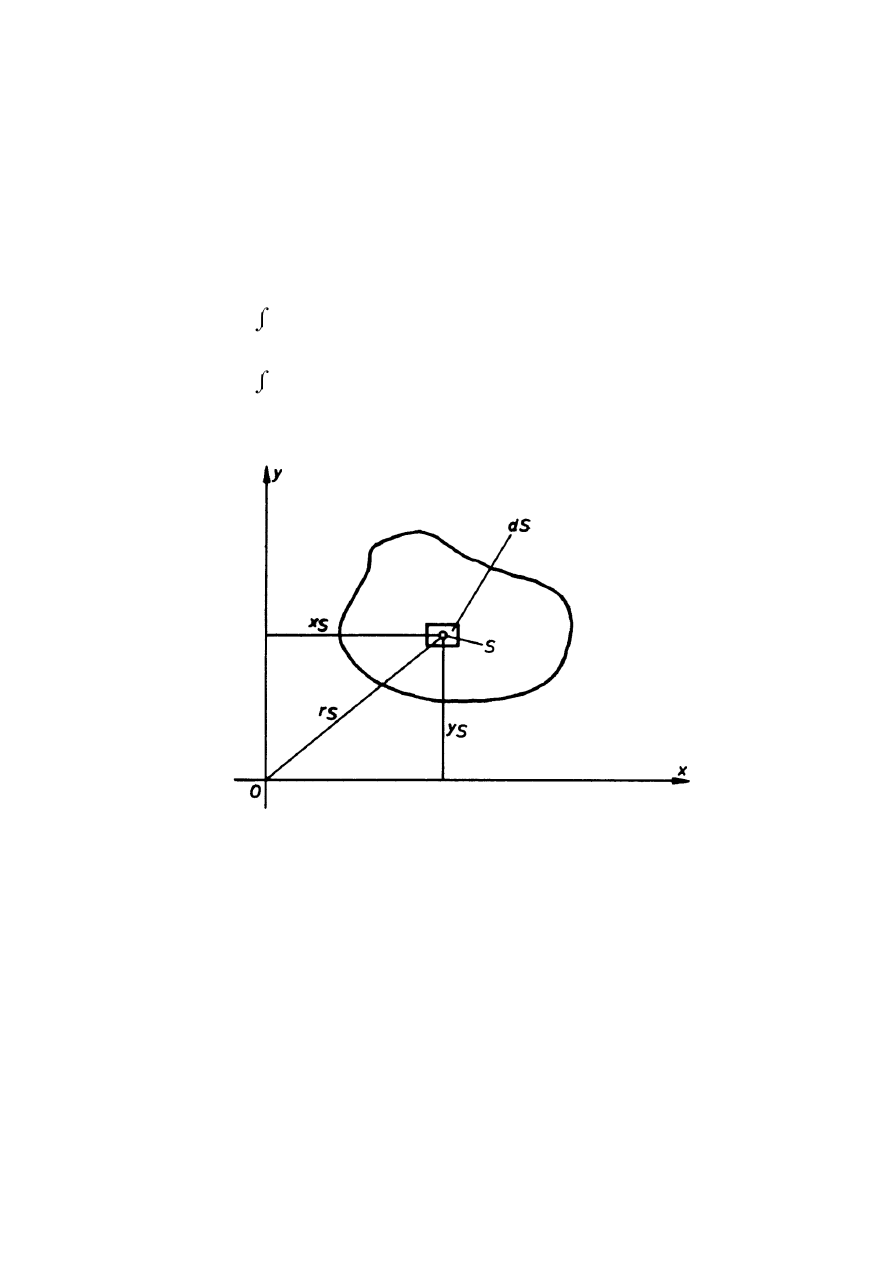
figury płaskiej względem osi x lub y (rys. 7.1)
nazywamy granicę algebraicznej sumy iloczynów elementarnych pól dS przez ich odległości
od osi, gdy elementarne pola dS dążą do zera, tzn.:
M
x
=
S
y dS
M
y
=
S
x dS
(7.1)
Rys. 7.1.
Punkt S, którego położenie jest określone za pomocą promienia wektora r, nazywamy
środkiem masy układu (środkiem ciężkości).
Jeśli znane jest położenie środka ciężkości figury płaskiej, to wtedy momenty statyczne
można określić wprost:
M
x
= S y
S
,
M
y
= S x
S,
(7.2)
gdzie:
S – pole figury płaskiej,
x
S
, y
S
– współrzędne jej środka ciężkości w przyjętym układzie osi x, y.
Współrzędne x
S
, y
S
mogą być dodatnie lub ujemne. Wobec tego i momenty statyczne
mogą przyjmować dodatnie lub ujemne wartości. Dla każdej osi przechodzącej przez środek
ciężkości (tzw. osi ciężkości) współrzędne są równe zeru. Wynika stąd wniosek, że momenty
statyczne obliczane względem osi ciężkości są równe zeru.
Do obliczenia momentu statycznego figury złożonej, której środka ciężkości nie
potrafimy wyznaczyć w sposób bezpośredni, zmuszeni jesteśmy podzielić tę figurę na figury
elementarne (o znanym położeniu środków ciężkości) i wtedy moment statyczny całej figury
względem danej osi będzie równy sumie momentów poszczególnych elementów względem
tej osi:
M
x
= S
1
y
1
+ S
2
y
2
+ … + S
n
y
n
=
n
i
i
i
y
S
1
M
y
= S
1
x
1
+ S
2
x
2
+ … + S
n
x
n
=
n
i
i
i
x
S
1
(7.3)
Współrzędne środka ciężkości figury płaskiej można wyznaczyć z (7.2):
x
S
=
M
y
S
y
S
=
M
x
S
(7.4)
Dla figur złożonych otrzymamy z przekształcenia wzoru (7.3):
x
S
=
n
i
i
n
i
i
i
S
x
S
1
1
,
y
S
=
n
i
i
n
i
i
i
S
y
S
1
1
.
(7.5)
Równania (7.5) pozwalają wyznaczyć współrzędne środka ciężkości figury płaskiej, gdy
znane są pola powierzchni i współrzędne środków ciężkości poszczególnych figur.
Przy wyznaczaniu środków ciężkości pomocne są pewne twierdzenia, a mianowicie:
- środek ciężkości układu płaskiego leży w płaszczyźnie tego układu,
- środek ciężkości linii prostej leży na tej linii,
- środek ciężkości dwóch punktów materialnych leży na prostej łączącej te punkty i dzieli
odległość obu punktów na odcinki o długościach odwrotnie proporcjonalnych do ich mas,
- środek ciężkości układu mającego środek symetrii leży w tym środku,
- jeżeli układ ma oś symetrii, środek ciężkości leży na niej,
- jeżeli układ ma dwie lub więcej osi symetrii, środek ciężkości leży na przecięciu się tych
osi,
- rzut środka ciężkości figury płaskiej na dowolną płaszczyznę jest środkiem ciężkości
rzutu tej figury na daną płaszczyznę.
Moment statyczny figury płaskiej względem dowolnego punktu O jest sumą wektorową
momentów statycznych poszczególnych elementów układu względem O.
Moment statyczny dowolnej figury płaskiej względem dowolnej prostej L równa się
wektorowej sumie momentów statycznych poszczególnych figur elementarnych względem tej
prostej L.
Wynikają stąd pewne własności środka ciężkości, których znajomość ułatwia
rozwiązywanie szeregu zagadnień, a mianowicie:
- jeśli moment statyczny dowolnej figury płaskiej względem pewnego punktu jest równy
zeru, to punkt ten jest środkiem ciężkości. Podobnie możemy powiedzieć, że jeśli moment
statyczny figury płaskiej względem pewnej prostej jest równy zeru, to wtedy ta prosta
przechodzi przez środek ciężkości,
- jeśli figura płaska posiada oś symetrii, to moment statyczny figury względem tej osi jest
równy zeru,
- jeśli figurę płaską podzielimy na elementy o polach powierzchni S
1
, S
2
,... S
n
o znanych
środkach ciężkości, to środek ciężkości całej figury płaskiej jest równocześnie środkiem
ciężkości poszczególnych figur (S
1
, S
2
,... S
n
) względem ich środków.
Momenty bezwładności i dewiacji (zboczenia) figury płaskiej
Oprócz momentów statycznych, które są momentami stopnia pierwszego, istnieją
momenty stopnia drugiego, którymi są momenty bezwładności oraz momenty dewiacji
(zboczenia). Mają one szczególne znaczenie w wytrzymałości materiałów.
Osiowym momentem bezwładności figury płaskiej względem dowolnej osi leżącej w
płaszczyźnie figury (rys. 7.1) nazywamy granicę algebraicznej sumy, dla całej powierzchni S
figury płaskiej, iloczynów elementarnych pól dS przez kwadrat ich odległości od danej osi,
gdy elementarne pola dążą do zera, tzn.:
J
x
=
S
y
2
dS
J
y
=
S
x
2
dS
(7.6)
Momenty te są zawsze dodatnie i można je traktować jako swego rodzaju miarę rozproszenia
przekroju wokół danej osi: im bardziej pole figury płaskiej jest skupione wokół osi, tym
moment bezwładności względem niej jest mniejszy.
Biegunowym momentem bezwładności figury płaskiej nazywamy granicę algebraicznej
sumy, dla całej powierzchni S figury płaskiej, iloczynów elementarnych pól dS przez kwadrat
odległości od początku układu współrzędnych (rys. 7.1), gdy elementarne pola dążą do zera.
Wykorzystując związek geometryczny występujący między współrzędnymi (x, y) a
odległością biegunową r (rys. 7.1), biegunowy moment bezwładności możemy określić jako
sumę osiowych momentów bezwładności, gdyż:
r
2
= x
2
+ y
2
J
0
=
S
r
2
dS =
S
(x
2
+ y
2
) dS = J
x
+ J
y
(7.7)
Moment ten jest swego rodzaju miarą rozproszenia pola figury płaskiej wokół początku
układu współrzędnych.
Z podanych zależności wynika:
- moment bezwładności względem osi jest równy sumie momentów bezwładności
względem dwóch płaszczyzn wzajemnie prostopadłych, przecinających się wzdłuż tej osi,
- biegunowy moment bezwładności J
0
jest równy sumie momentów bezwładności
względem dwu wzajemnie prostopadłych osi, przecinających się w punkcie O (dla układu
płaskiego).
Miarą momentu bezwładności jest [m
4
].
Momentem dewiacji (zboczenia) figury płaskiej o powierzchni S nazywamy granicę
algebraicznej sumy iloczynów elementarnych powierzchni dS → 0 przez ich współrzędne x i
y. Sumowanie to odbywa się po całej powierzchni S figury płaskiej, tzn.:
J
xy
=
S
xy dS
(7.8)
Moment dewiacji J
xy
danej figury płaskiej równa się zeru, jeśli choć jedna z osi,
względem których został wyznaczony, jest osią symetrii rozpatrywanej figury. J
xy
może
przyjmować wartości dodatnie, ujemne lub zero.
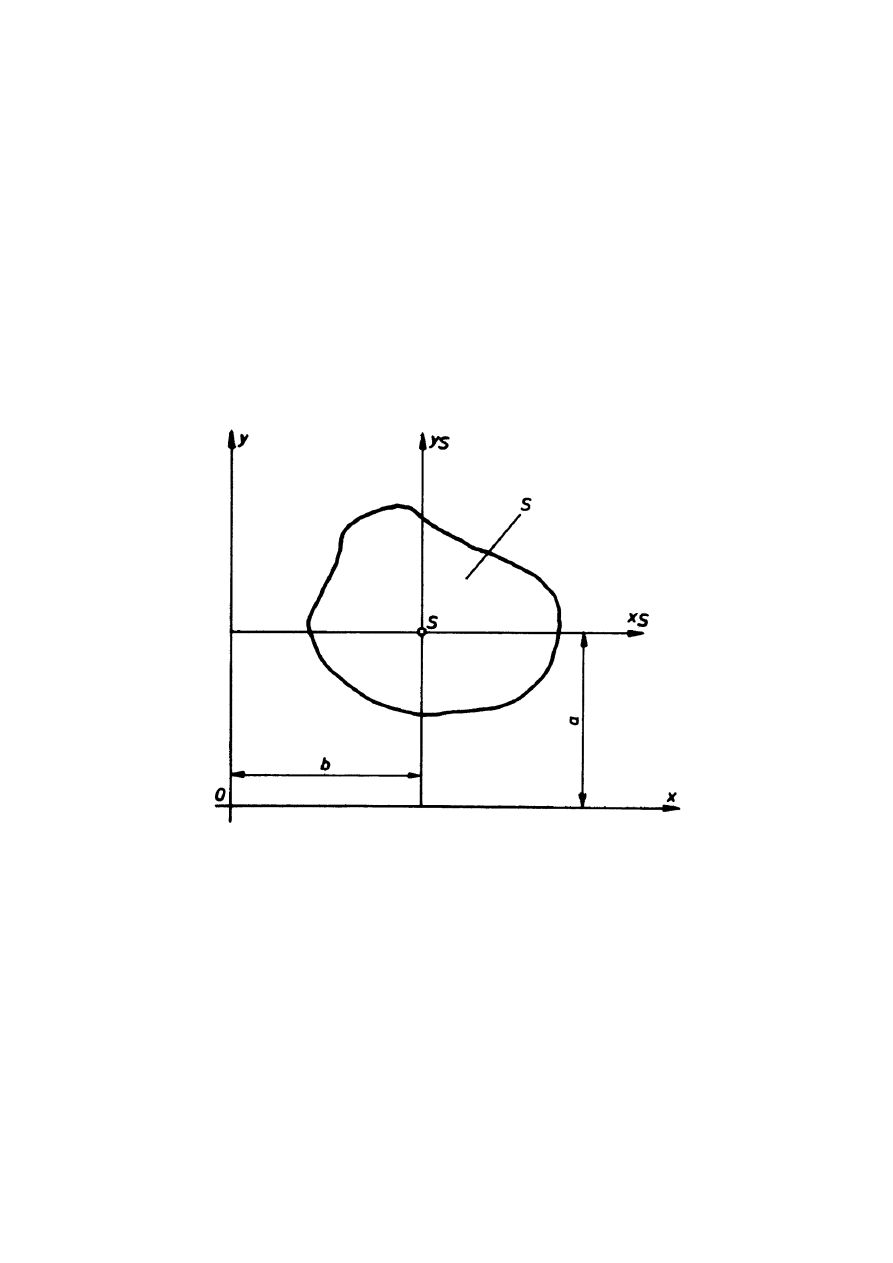
Między momentami bezwładności względem układów osi równoległych, z których
jeden jest układem osi środkowych: x
S
, y
S
(rys. 7.2), zachodzą następujące związki (tzw.
wzory Steinera):
J
x
= J
xS
+ a
2
S,
J
y
= J
yS
+ b
2
S,
(7.9)
J
xy
= J
xSyS
+ a b S,
gdzie:
a, b – współrzędne środka ciężkości w układzie xy (rys. 7.2),
x
S
, y
S
– osie przechodzące przez środek ciężkości figury płaskiej,
x, y – osie równoległe do x
S
, y
S
.
Twierdzenie Steinera, które zostało zapisane za pomocą wzorów (7.9) wyraża się
następująco:
Rys. 7.2.
Moment bezwładności względem dowolnej osi x, równoległej do osi x
S
, przechodzącej
przez środek ciężkości figury płaskiej, jest równy momentowi bezwładności tej figury
względem osi x
S
,
powiększony o iloczyn pola powierzchni i kwadrat odległości pomiędzy
osiami.
Z twierdzenia Steinera wynika, że momenty bezwładności względem osi
przechodzących przez środek ciężkości są najmniejsze. Płaszczyzny takie lub osie nazywa się
płaszczyznami lub osiami środkowymi.
Moment bezwładności względem płaszczyzny, osi lub punktu można wyrazić jako
iloczyn masy ciała przez kwadrat pewnej odległości noszącej nazwę promienia bezwładności,
oznaczanej przez i z odpowiednim indeksem określającym względem czego jest obliczany
moment bezwładności (np. i
x
– oznacza promień bezwładności masy względem osi x).
Ogólnie:
i
i
=
I
i
m
(7.10)
Promień bezwładności odpowiada odległości w której należałoby skupić całą masę, aby
moment bezwładności skupionej masy był równy momentowi bezwładności całej masy.
Pojęcia promienia bezwładności i
i
nie należy utożsamiać z odległością środka masy r
C
,
gdyż są to pojęcia całkowicie różne.
Rys. 7.3.
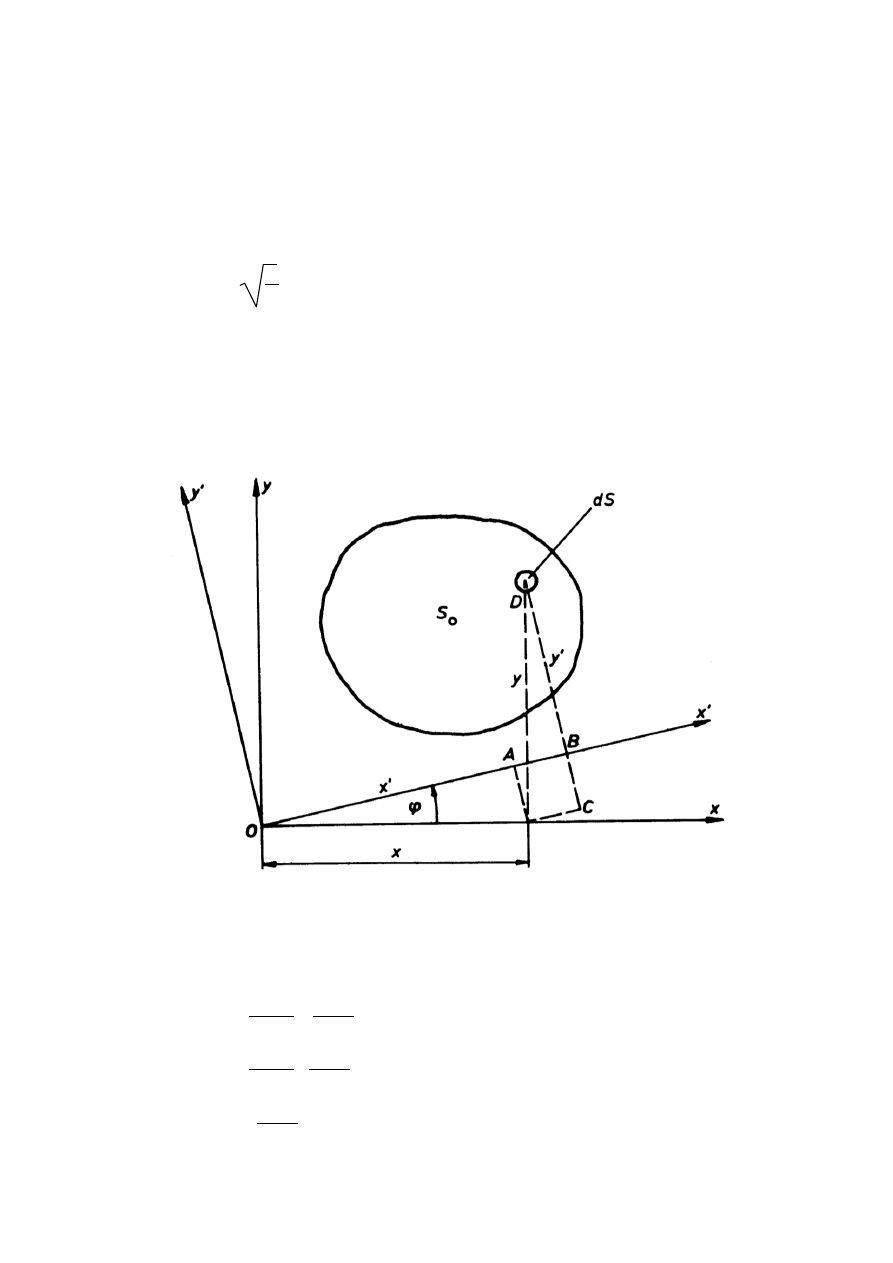
Dla układów obróconych (rys. 7.3) związki między momentami przedstawiają się w
sposób następujący:
J
x'
=
J
x
+ J
y
2
+
J
x
- J
y
2
cos2φ - J
xy
sin2φ ,
J
y'
=
J
x
+ J
y
2
-
J
x
- J
y
2
cos2φ + J
xy
sin2φ ,
(7.10)
J
x'y'
=
J
x
- J
y
2
sin2φ + J
xy
cos2φ .

gdzie:
φ – kąt między układami osi obróconych, mierzony od dodatniego kierunku osi x, odkładany
zgodnie z zasadami stosowanymi w trygonometrii.
Wzory (7.10) wyrażają szukane zależności między momentami bezwładności i dewiacji
dla dwóch układów osi współrzędnych o wspólnym początku układu współrzędnych.
Dodając stronami pierwsze dwa równania (7.10) łatwo zauważyć związek:
J
x
+ J
y
= J
x’
+ J
y’
= J
0
= const.
(7.11)
Widzimy, ze suma momentów bezwładności względem dwu wzajemnie prostopadłych
osi, przecinających się w danym punkcie O, nie zależy od kierunku tych osi (od kąta φ) i jest
równa biegunowemu momentowi bezwładności względem O.
Osiami głównymi pola figury płaskiej nazywamy układ prostokątnych osi, względem
których moment dewiacji danej figury jest równy zeru. Oznaczać je będziemy przez 1, 2.
Osie główne, których początek leży w środku ciężkości rozpatrywanej figury płaskiej,
nazywamy głównymi centralnymi osiami bezwładności.
Osie główne są w stosunku do dowolnie przyjętego układu osi x, y (rys. 7.4) obrócone o kąt φ
taki, że:
tg2φ = -
2 J
xy
J
x
- J
y
(7.12)
Otrzymujemy dwa pierwiastki φ
oI
oraz φ
oII
w przedziale (0; 2π). W celu rozstrzygnięcia, która
oś jest osią maksymalną momentu bezwładności a która minimalną, można skorzystać z
poniższych wzorów.
Różniczkując otrzymujemy:
oI
xy
x
J
d
J
d
o
2
sin
4
1
2
1
2
oII
xy
x
J
d
J
d
oII
2
sin
4
2
1
2
(7.13)
Ze wzorów (7.13) widać, że oś 1 maksymalnego momentu bezwładności tworzy z osią x
kąt ostry przy momencie J
xy
< 0, zaś kąt rozwarty przy momencie J
xy
> 0.
Osiowe momenty bezwładności wyznaczone względem osi głównych, tzw. główne
momenty bezwładności, mają wartości ekstremalne: moment względem jednej z nich jest
maksymalny który oznaczamy go przez J
1
, drugi – minimalny i oznaczamy go przez J
2
.
Wartości tych momentów wyznacza się z następujących wzorów:
J
1
= J
max
=
J
x
+ J
y
2
+
(
J
x
- J
y
2
)
2
+ J
xy
2
,

J
2
= J
min
=
J
x
+ J
y
2
-
(
J
x
- J
y
2
)
2
+ J
xy
2
,
(7.14)
gdzie:
J
x
, J
y
, J
xy
– momenty bezwładności oraz dewiacji względem dowolnie przyjętego układu osi
współrzędnych x, y układu o takim samym początku jak szukany układ osi głównych
(rys. 7.4).
Rys. 7.4.
Wzory (7.12) i (7.14) pozwalają wyznaczyć główne osie i główne momenty
bezwładności, jeżeli znamy momenty bezwładności i moment dewiacji względem dowolnych
osi x, y.
Wyszukiwarka
Podobne podstrony:
house geometric shapes id 20624 Nieznany
GEOMETRIA PDF id 189573 Nieznany
GEOMETRIA ANAL id 189450 Nieznany
MAS e przyklad roz id 281198 Nieznany
geometria i garsc dowodow id 18 Nieznany
geometria kolo szyna id 189562 Nieznany
GEOMETRIA 2 id 189404 Nieznany
geometria 113,5x66cm id 189441 Nieznany
BO2 metoda geometryczna id 9105 Nieznany
Abolicja podatkowa id 50334 Nieznany (2)
4 LIDER MENEDZER id 37733 Nieznany (2)
katechezy MB id 233498 Nieznany
metro sciaga id 296943 Nieznany
perf id 354744 Nieznany
interbase id 92028 Nieznany
Mbaku id 289860 Nieznany
więcej podobnych podstron