
Ćwiczenie 1
Egzemplarz dla prowadzącego
Pomiary statyczne
1.
Cel i zakres ćwiczenia
Jest to ćwiczenie wprowadzające w tematykę pomiarowo-interpretacyjną. Ma ono za
zadanie przygotować i oswoić studenta z techniką pomiarową, i pozwolić mu na swobodne
poruszanie się po laboratorium oraz rozpoznawanie przyrządów i oprogramowania służącego
do pomiaru sygnału, jego obróbki numerycznej i interpretacji oraz przypomnienie
teoretycznych podstaw z mechaniki budowli i wytrzymałości materiałów, związanych z
badaniem odkształceń, przemieszczeń i naprężeń w konstrukcji.
Dodatkowo należy uprzedzić studentów o przestrzeganiu przepisów BHP w pracowni.
2.
Opis stanowiska dla badania odkształceń i przemieszczeń konstrukcji.
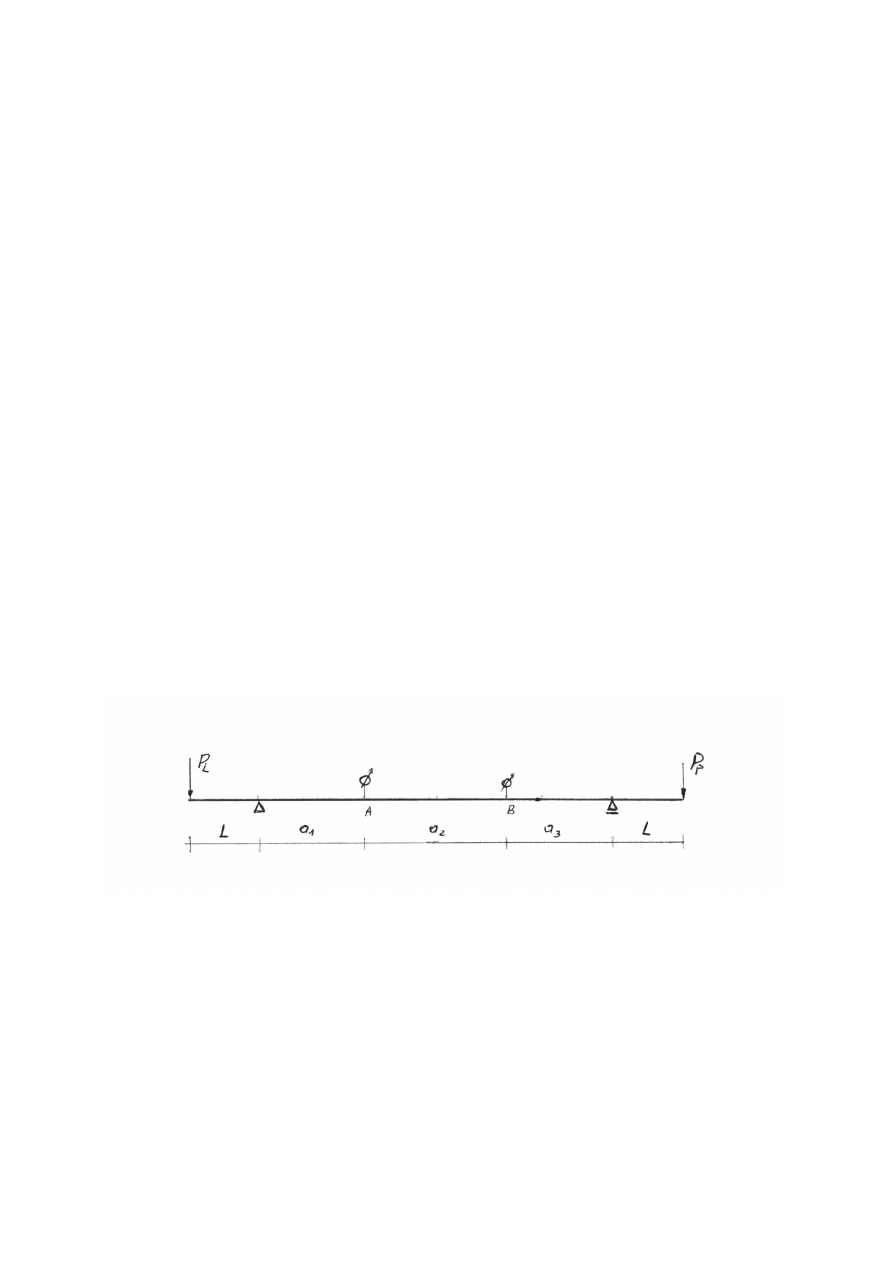
Stanowisko składa się ze swobodnie podpartej belki z przewieszeniami o długości
a
1
+a
2
+a
3
między podporami i przewieszeniach L, znajdującej się na standzie. Belka ma
przekrój prostokątny b
x
h. Do belki na przewieszeniach umocowano dwa wyskalowane
dynamometry – służące do pomiaru wielkości sił poprzecznych obciążających belkę.
Dodatkowo w przekrojach A i B umieszczono zegarowe czujniki drogi, pozwalające na
pomiar przemieszczeń w tych przekrojach. Przy pomocy przymiaru i suwmiarki mierzymy
charakterystyczne wymiary belki. Do przeprowadzenia ćwiczenia potrzebna jest rejestracja
cyfrowa (lub odczyt) sygnału w postaci zbioru czterech elementów: sił P
L1
, P
P1
oraz
przemieszczeń y
A1
, y
B1
. Dokonujemy tego przy pomocy odpowiedniego mostka, karty
przetworników a/c i komputera rejestrującego, lub odczytów napięcia bezpośrednio z mostka
lub oscyloskopu. Sygnał (P
L1
, P
P1
, y
A1
,
y
B1
) może być wykorzystany w wywołanym w
programie Mathcad z dowolnego stanowiska komputerowego zbiorze cwiczenie 1.mcd.
3.
Wykonanie ćwiczenia.
Do przeprowadzenia ćwiczenia potrzebne jest obciążenie przygotowanej konstrukcji
siłami P
L
i P
P
zrealizowanymi przy pomocy śrub rzymskich i zarejestrowanie w stanie
równowagi trwałej sygnału (P
L1
, P
P1
, y
A1
,
y
B1
). Ponieważ interesują nas zależności
wynikające ze statyki, konieczne jest takie dobranie obciążeń, aby spowodować stan prostego
zginania. Wtedy wykorzystamy wzory potrzebne na:
•
odczyt sił P
L1
, P
P1
– pozwala on na obliczenie przemieszczeń y
A
i y
B
(całkowanie
graficzne) oraz porównanie do wyniku teoretycznego (wstępnie znane siły i
momenty, oraz EI)

•
odczyt przemieszczeń y
A1
,
y
B1
(całkowanie graficzne) oraz porównanie do wyniku
teoretycznego P
L,
P
P
(wstępnie znane przemieszczenia, oraz EI),
4.
Opracowanie wyników badań i obliczenie błędów.
Student mając do dyspozycji program Mathcad oraz dane pomiarowe, zarówno
dotyczące właściwego eksperymentu (P
L1
, P
P1
, y
A1
,
y
B1
), jak i stałe materiałowe oraz dane
przekrojowe i belki – każdorazowo pomierzone i uśrednione powinien:
•
opisać stanowisko badawcze i podstawy teoretyczne.
•
wprowadzić prawidłowo dane do komputera,
•
obliczyć numerycznie błędy pomiaru i wypełnić załączoną tabelkę.
5.
Zaliczenie projektu
Student powinien na zakończenie ćwiczenia umieć
•
opisać stanowisko badawcze, z zaznaczeniem nowych elementów występujących
w ćwiczeniu czujniki, mostek, karta przetworników, rejestracja sygnału,
•
znać podstawy teoretyczne: zginanie, metoda sił, związki odkształcenia-
naprężenia,
•
wykonywać najprostsze czynności w Mathcadzie.

Ćwiczenie 2
Egzemplarz dla prowadzącego
Doświadczalne wyznaczanie reakcji belki
trójprzęsłowej
Cel ćwiczenia
Celem ćwiczenia jest pokazanie sensu fizycznego współczynników układu równań
kanonicznych metody sił oraz sensu fizycznego poszczególnych równań jak i całego
układu; jest też celem pokazanie zasady wzajemności przemieszczeń.
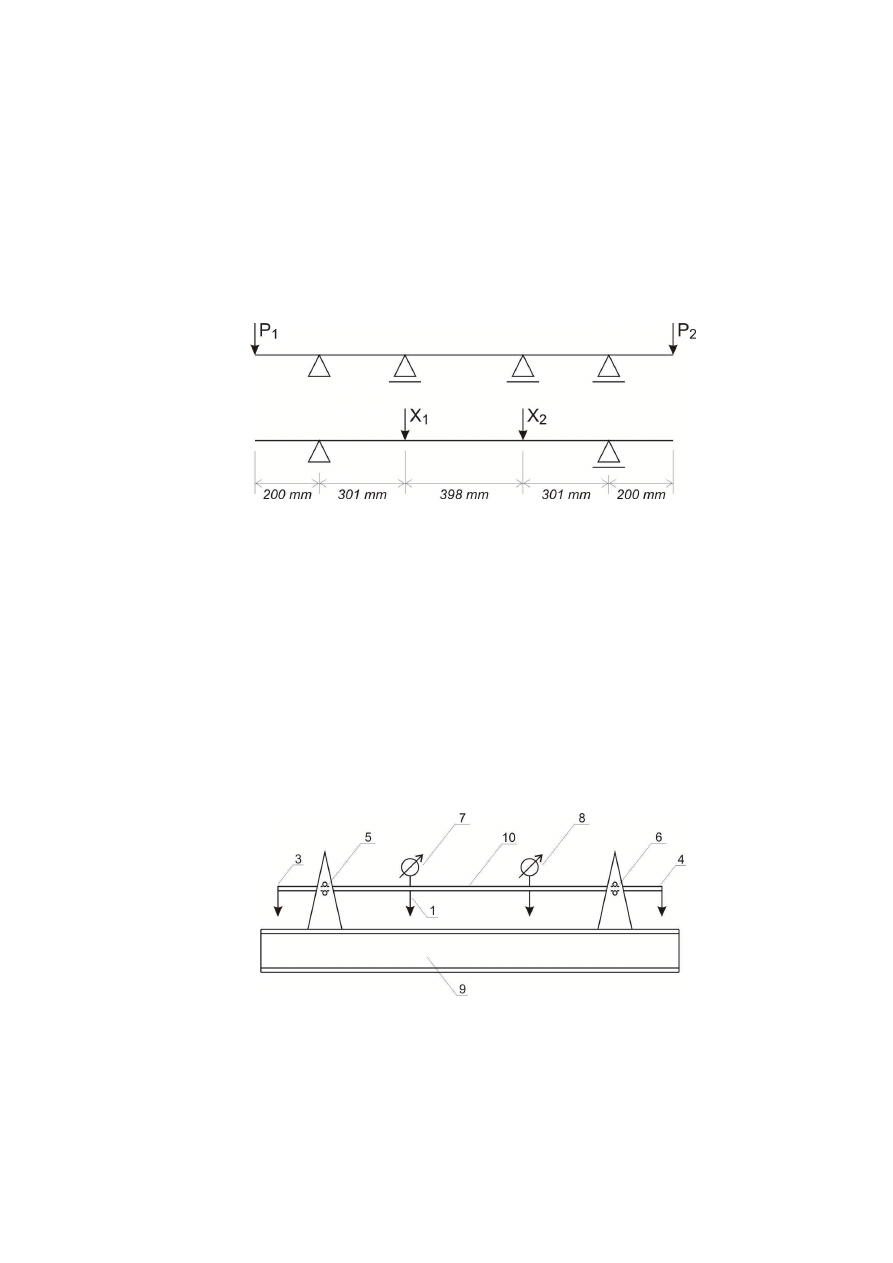
Reakcje podpór 1 i 2 dla belki jak na rysunku można wyznaczyć w dwojaki sposób:
1.
Wyznaczając teoretycznie współczynniki układu równań wg zasad Metody Sił:
δ
11
,
δ
12
,
δ
21
,
δ
22
,
∆
1P
,
∆
2P
, przy przyjęciu za niewiadome hiperstatyczne poszukiwanych
reakcj. Siły X
1
i X
2
wyznacza się z układu równań:
δ
11
X
1
+
δ
12
X
2
+
∆
1P
=0
δ
21
X
1
+
δ
22
X
2
+
∆
2P
=0
2.
Wyznaczając eksperymentalnie współczynniki układu równań kanonicznych. Siły X
1
i
X
2
wyznacza się z układu równań, jak wyżej.
3.
Wyznaczając wprost reakcje X
1
i X
2
z warunku, że przemieszczenia punktów 1 i 2 dla
układu zastępczego mają być równe zero.
Krótki opis stanowiska
1-, 2-, 3-, 4-, punkty realizacji obciążeń (dynamometry)
5-, 6-, podpory
7- czujnik przemieszczeń dla punktu 1
8-
czujnik przemieszczeń dla punktu 2
9-
stend
10-
belka
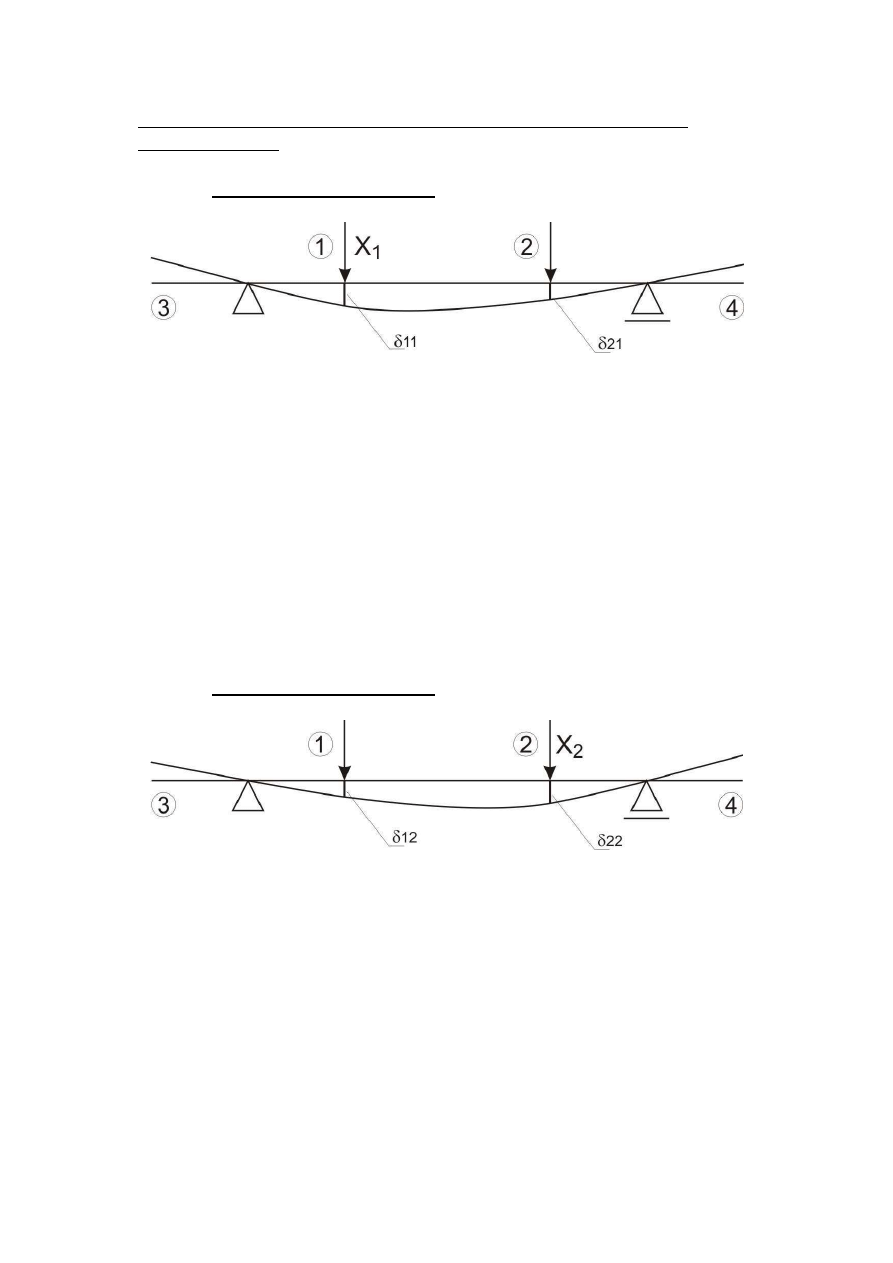
Doświadczalne wyznaczanie współczynników
δ
11
,
δ
21
układu równań
kanonicznych MS
Wyznaczanie
δδδδ
11
oraz
δδδδ
21
-
ustawiamy czujniki w punktach 1 i 2 w pozycji 0.00
-
w punkcie 1 przykładamy obciążenie za pomocą dynamometru (pozostałe
dynamometry są „zwolnione”)
-
odczytujemy wskazanie napięcia w Voltach na tensometrze (V
1
) oraz
przemieszczenia w punktach 1 i 2 (a
11
oraz a
21
) w milimetrach
-
obliczamy
δ
11
oraz
δ
21
jako iloraz odczytanej wartości przemieszczenia (w
metrach, a zatem po podzieleniu przez 1000) przez wartość siły obciążającej
odpowiadającej odczytanemu napięciu na tensometrze
Wyznaczanie
δδδδ
12
oraz
δδδδ
22
-
ustawiamy czujniki w punktach 1 i 2 w pozycji 0.00
-
w punkcie 2 przykładamy obciążenie za pomocą dynamometru (pozostałe
dynamometry są „zwolnione”)
-
odczytujemy wskazanie napięcia w Voltach na tensometrze (V
2
) oraz
przemieszczenia w punktach 1 i 2 (a
12
oraz a
22
) w milimetrach
-
obliczamy
δ
12
oraz
δ
22
jako iloraz odczytanej wartości przemieszczenia ( w
metrach, a zatem po podzieleniu przez 1000) przez wartość siły obciążającej
odpowiadającej odczytanemu napięciu na tensometrze
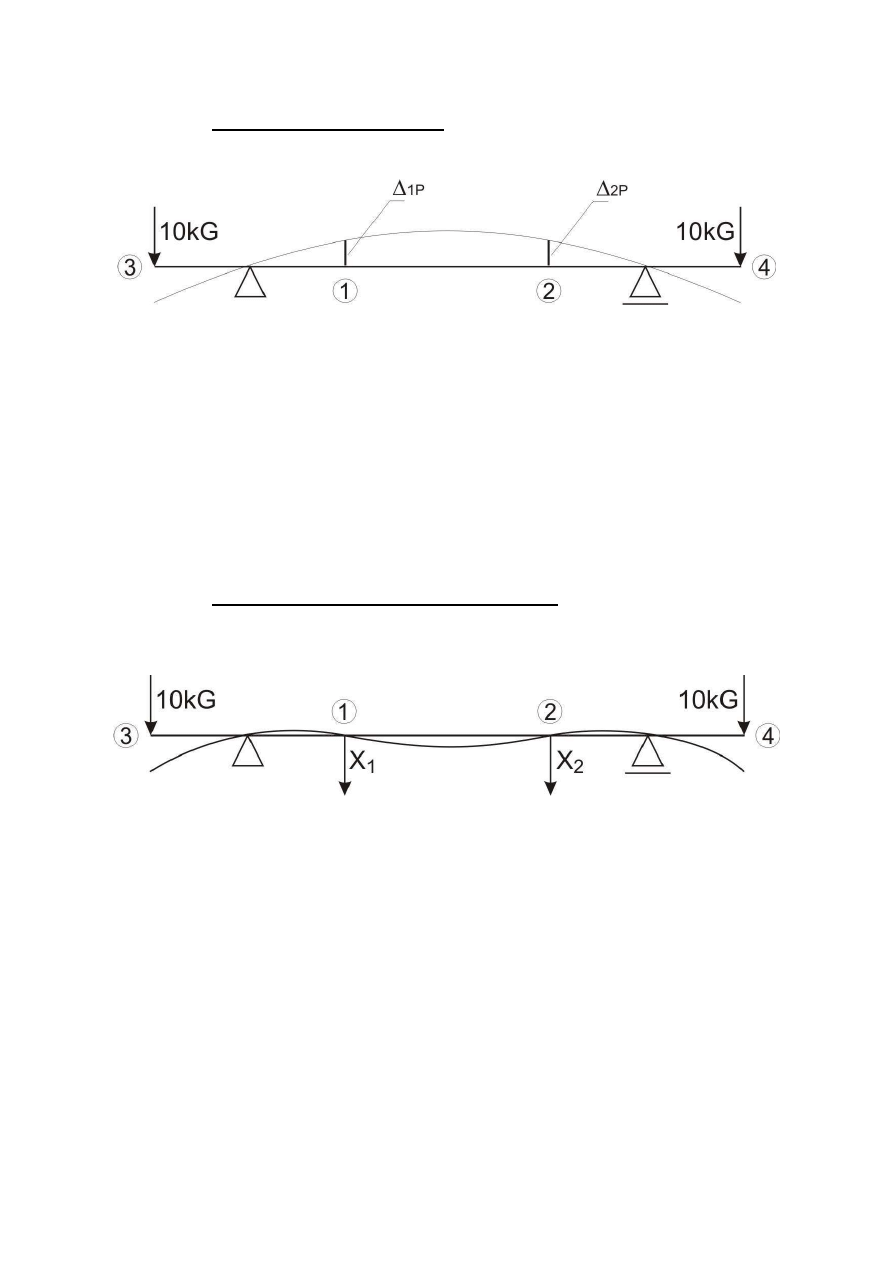
Wyznaczanie
∆∆∆∆
1P
oraz
∆∆∆∆
2P
-
ustawiamy czujniki w punktach 1 i 2 w pozycji 0.00
-
w punktach 1 oraz 4 przykładamy obciążenie 98.1 N (10 kG) za pomocą
dynamometrów (pozostałe dynamometry są „zwolnione”)
-
odczytujemy przemieszczenia w punktach 1 i 2 (A
1P
oraz A
2P
) w milimetrach
-
obliczamy
∆
1P oraz
∆
2P dzieląc odczytane wartości przez 1000
(sprowadzając do jednostek w układzie SI)
Doświadczalne wyznaczanie X1 oraz X2
-
ustawiamy czujniki w punktach 1 i 2 w pozycji 0.00
-
w punktach 1 oraz 4 przykładamy obciążenie 98.1 N (10 kG) za pomocą
dynamometrów (pozostałe dynamometry są „zwolnione”)
-
przykładamy obciążenie w punktach 1 i 2 za pomocą dynamometrów (które
dotąd były „zwolnione”) tak, aby przemieszczenie w punktach 1 i 2 osiągnęło
wartość
0.00
-
odczytujemy wartości napięcia na dynamometrach w punktach 1 i 2 w Voltach
-
obliczamy siły w powyższych punktach korzystając z charakterystyk
dynamometrów
Zakończenie ćwiczenia
Po obliczeniu reakcji w belce trójprzęsłowej trzema sposobami student oblicza
względny błąd (w odniesieniu do reakcji wyznaczonych teoretycznie- metodą sił), jaki
został popełniony w trakcie przeprowadzania eksperymentu:
Wyznaczone
teoretycznie
Wyznaczone na podstawie
pomierzonych
współczynników układu
równań kanonicznych
Pomierzone w czasie
eksperymentu
wartość
wartość
błąd
względny
[%]
wartość
błąd
względny
[%]
X
1
X
2

Ćwiczenie 4
Egzemplarz dla prowadzącego
Drgania własne układów prętowych
1.
Cel i zakres:
Celem
przedstawianych
doświadczeń
jest
określenie
właściwości
dynamicznych
(częstotliwości drgań własnych i logarytmicznego dekrementu tłumienia) wybranych
układów:
•
belki dwuprzęsłowej
•
ramy symetrycznej.
Wyznaczone doświadczalnie wartości częstotliwości drgań własnych belki dwuprzęsłowej
porównuje się z wartościami uzyskanymi z obliczeń analitycznych.
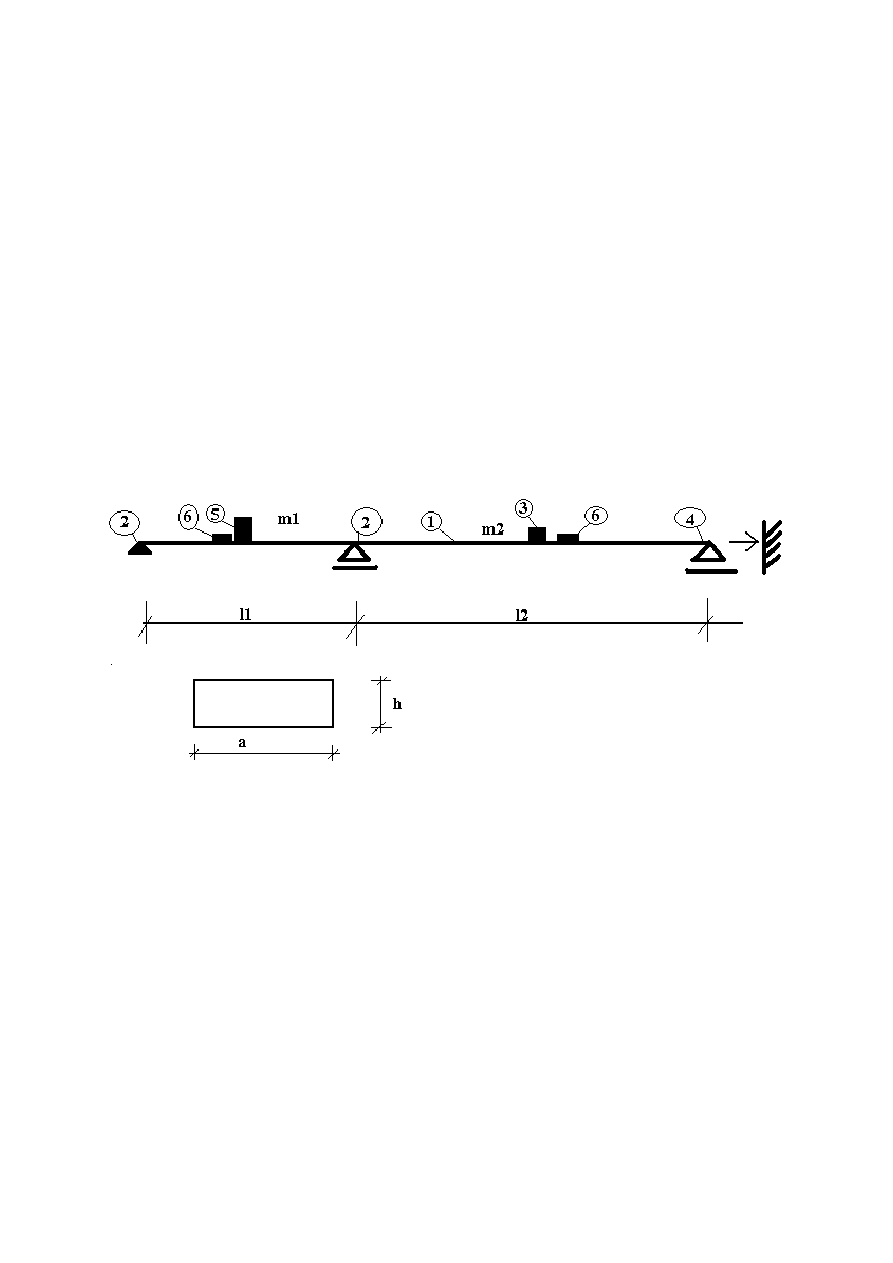
2.
Opis stanowisk i torów pomiarowych
a.
belka dwuprzęsłowa
① - pręt aluminiowy
② - podpora przegubowa
③ - wirująca tarcza z masą mimośrodową sprzęgnięta z silnikiem
④ - podpora zamienna (przegub ➙ utwierdzenie)
⑤ - akcelerometr
⑥ - tensometr elektrooporowy
Dane charakteryzujące belkę:
E = 7*10
4
MPa
l
1
=0.56m
m
1
= 0.488kg
a = 3*10
-2
m
l
2
= 0.92m
m
2
= 0.518kg
h = 0.8*10
-2
m
g = 0.026*10
4
N/m
3
Ix = 0.12810
-4
m
2
EIx = 89.6N m
2
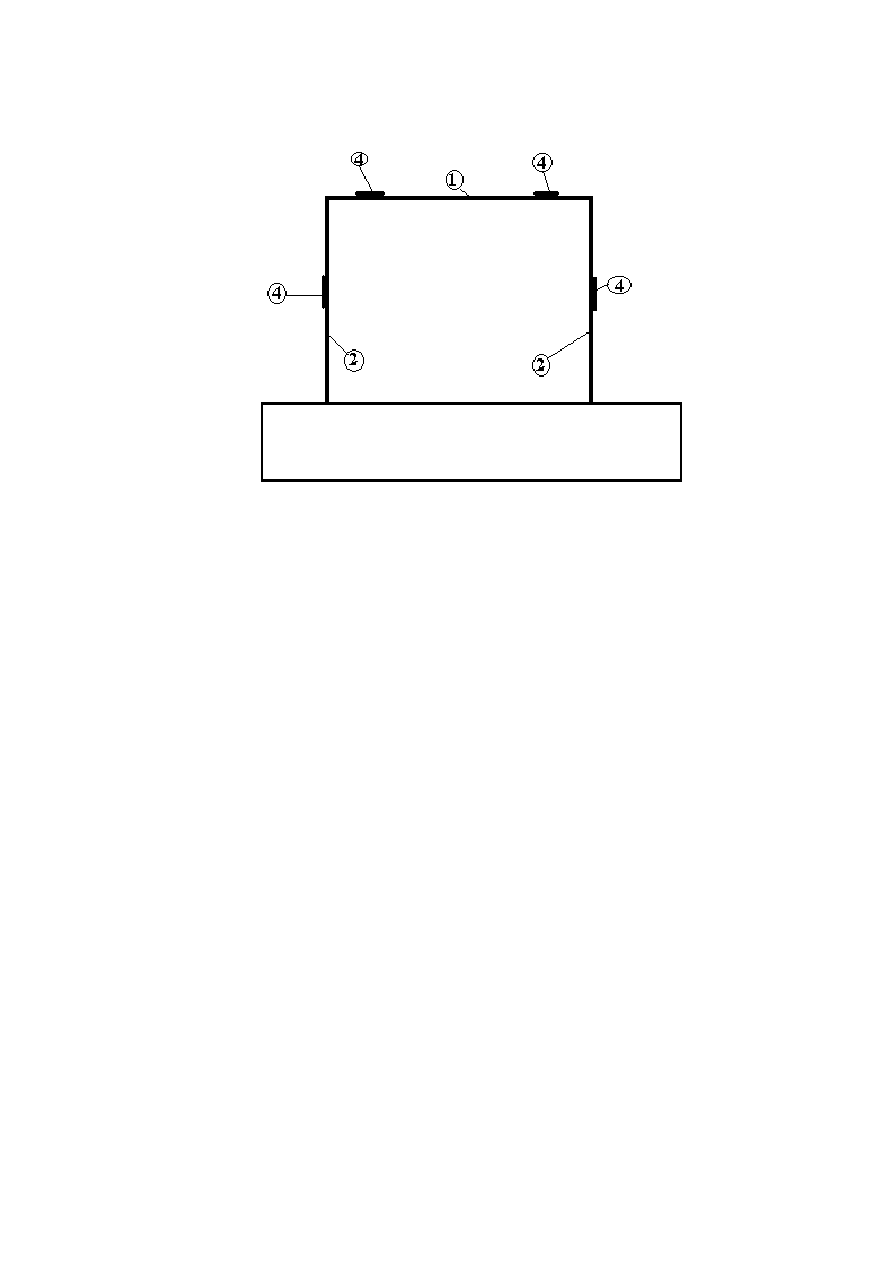
b.
rama symetryczna
① - rygiel ramy
② - słupy ramy
③- tensometry
Czujniki pomiarowe (akcelerometr i tensometr/y) połączone są poprzez wzmacniacz do
urządzenia rejestrującego (cyfrującego) przebieg drgań.
3.
Doświadczalne wyznaczenie częstotliwości drgań własnych i logarytmicznego
dekrementu tłumienia
Drgania badanych układów z częstotliwościami
własnymi wzbudza się za pomocą:
•
silnika z płynnie regulowaną liczbą obrotów,
•
impulsów (uderzeń) w rygiel ramy.
W momencie przechodzenia przez strefy rezonansu (kolejne czestotliwości drgań własnych
badanego układu pokrywają się z częstotliwościami obrotów silnika) następuje widoczny
wzrost amplitud drgań.
Podczas eksperymentów, w belce dwuprzesłowej zmienia się skrajną podporę przegubową na
utwierdzenie. W ten sposób zmienia się sztywność układu, co uwidacznia się podczas badań
zmianą wartości częstotliwości drgań własnych.
Drgania własne ramy symetrycznej wzbudza się poprzez uderzenia w rygiel ramy, równolegle
do osi rygla (drgania antysymetryczne) i prostopadle do osi rygla w środku jego rozpietości
(drgania symetryczne).

Wartości częstotliwości drgań własnych badanych układów wyznacza się wykorzystując
zapisane i scyfrowane przebiegi przyspieszeń drgań lub odkształceń. Zbiory tych danych
wprowadza się do programu MCAD i wykorzystuje gotową procedurę FFT.
Dane zapisywane są w następujących zbiorach:
•
belka dwuprzęsłowa, przegubowo podparta
-
przebiegi odkształceń: t1_t2f1p.dat – odpowiadające f
1
-
przebiegi odkształceń: t1_t2f2p.dat – odpowiadające f
2
•
belka dwuprzęsłowa, przegubowo podparta z utwierdzeniem na prawym końcu
-
przebiegi odkształceń: t1_t2f1u.dat – odpowiadające f
1
-
przebiegi odkształceń: t1_t2f2u.dat – odpowiadające f
2
Ponadto zbiory acc_f1pu.dat i accf2pu.dat zawierają wartości przyspieszeń odpowiadających
odpowiednio f
1
i f
2
. Pierwsza kolumna w tych zbiorach odpowiada belce z wszystkimi
podporami przegubowymi, a kolumna druga odpowiada przypadkowi z utwierdzeniem belki
na prawej podporze.
•
rama
-
przebiegi odkształceń opowiadające antysymetrycznej postaci drgań (boczne uderzenie
w poziomie rygla) - t1_t4rb.dat (tensometry T1 i T4), t2_t3rb.dat (tensometry T2 i T3)
-
przebiegi odkształceń opowiadające symetrycznej postaci drgań (uderzenie od góry w
ś
rodku rozpiętości rygla) - t1_t4rg.dat (tensometry T1 i T4), t2_t3rb.dat (tensometry
T2 i T3)
•
Wartości logarytmicznego dekrementu tłumienia (
d) drgań wyznacza się wykorzystując
wzór:
d
d
d
d = (1/n) * ln(A
1
/A
1+n
)
gdzie:
n – liczba okresów drgań,
A
1
, A
1+n
– odpowiednio amplitudy początkowa i końcowa przebiegu drgań.
4.
Analityczne wyznaczenie częstotliwości drgań własnych belki dwuprzesłowej
Belkę modeluje się układe4m po dwóch stopniach dynamicznej swobody. W przypadku
wszystkich podpór przegubowych belka jest układem 1-krotnie statycznie niewyznaczalnym.
Gdy analizujemy belkę z utwierdzoną skrajną prawą podporą wówczas układ jest 2-krotnie
statycznie niewyznaczalny. Do analitycznego wyznaczenia częstotliwości drgań własnych f
1
i
f
2
[Hz] wykorzystujemy wzór:
f
1,2
= 1/2
p
p
p
p * sqrt {[m
1
d
d
d
d
11
+ m
2
d
d
d
d
22
m
m
m
m
sqrt ((m
1
d
d
d
d
11
+ m
2
d
d
d
d
22
)
2
- 4 m
1
m
2
(
d
d
d
d
11
d
d
d
d
22
-
d
d
d
d
12
2
))]/2m
1
m
2
(
d
d
d
d
11
d
d
d
d
22
-
d
d
d
d
12
2
)}
gdzie:
d
11,
d
22,
d
12
– elementy macierzy podatności analizowanego układu.
©
©
©
©
Dla układu z podporami przegubowymi:
d
11
= 2.878*10
-3
/ EIx

d
22
= 10.55*10
-3
/ EIx
d
12
= -2.105*10
-3
/ Eix
f
1
= 19.51Hz
A11 = 1
A21 = -3.961
f
2
= 44.51Hz
A12 = 1
A22 = 0.238
©
©
©
©
Dla układu z utwierdzeniem:
d
11
= 2.718*10
-3
/ EIx
d
22
= 5.45*10
-3
/ EIx
d
12
= -1.235*10
-3
/ Eix
f
1
= 27.28Hz
A11 = 1
A21 = -2.69
f
2
= 45.37Hz
A12 = 1
A22 = 0.35
5.
Tabelaryczne zestawienie wyników
Dane do obliczeń
Belka
dwuprzęsłowa
Wartości częstotliwości drgań własnych
[Hz]
Wartość
logarytmicznego
dekrementu
tłumienia
d
d
d
d [-]
f1
f2
z obliczeń z pomiaru z obliczeń z pomiaru
z podporami
przegubowymi
19.51
21.05
44.51
44.25
d
ś
r.
= 0.132
z
utwierdzeniem
27.28
28.5
45.37
46.5
Pomierzone częstotliwości drgań własnych ramy
[Hz]
Wartość logarytmicznego
dekrementu tłumienia
d
d
d
d [-]
f
1
f
2
20.5
60.8 - 61.6
d
ś
r.
= 0.021
Dane do obliczenia logarytmicznego dekrementu tłumienia drgań ramy:
-
uderzenie z góry w środek rygla
n = 100
Tensometry:
T1 - A
1
= 0.466663, A
101
= 0.059558, T2 - A
1
= 1.462364, A
101
= 0.258751
T3 - A
1
= 1.89602, A
101
= 0.30178,
T4 - A
1
= 0.27428, A
101
= 0.04448
-
uderzenie boczne w poziomie rygla
n = 100
Tensometry:
T1 - A
1
= 0.432055, A
101
= 0.044787
T2 - A
1
= 1.943908, A
101
= 0.190368
T3 - A
1
= 2.19178, A
101
= 0.22309
T4 - A
1
= 0.36081, A
101
= 0.03092
Dane do obliczenia logarytmicznego dekrementu tłumienia drgań belki dwuprzęsłowej:
-
belka podparta przegubowo
n = 14
Tensometry:
T1 - A
1
= 0.904, A
15
= 0.176,
T2 - A
1
= 2.343, A
15
= 0.229
-
belka z utwierdzeniem
n = 15
Tensometr T2: A
1
= 1.185, A
16
= 0.2209

Ćwiczenie 5
Egzemplarz dla prowadzącego
DRGANIA WYMUSZONE
BELKI STATYCZNIE NIEWYZNACZALNEJ
1.
Cel laboratorium
•
Pokazanie możliwości wyznaczenia sił dynamicznych i momentów zginających
w belce statycznie niewyznaczalnej, wywołanych obciążeniem dynamicznym
harmonicznie
zmiennym
(dwie
metody
wyznaczania:
siły
z
przyspieszeń
zarejestrowanych akcelerometrem i momenty zginające wyznaczone w oparciu o odczyty
z tensometrów). Porównanie uzyskanych wyników z rozwiązaniem teoretycznym.
•
Pokazanie wpływu tłumienia konstrukcji na ograniczenie wielkości amplitud drgań
przęseł belki pracującej w rezonansie.
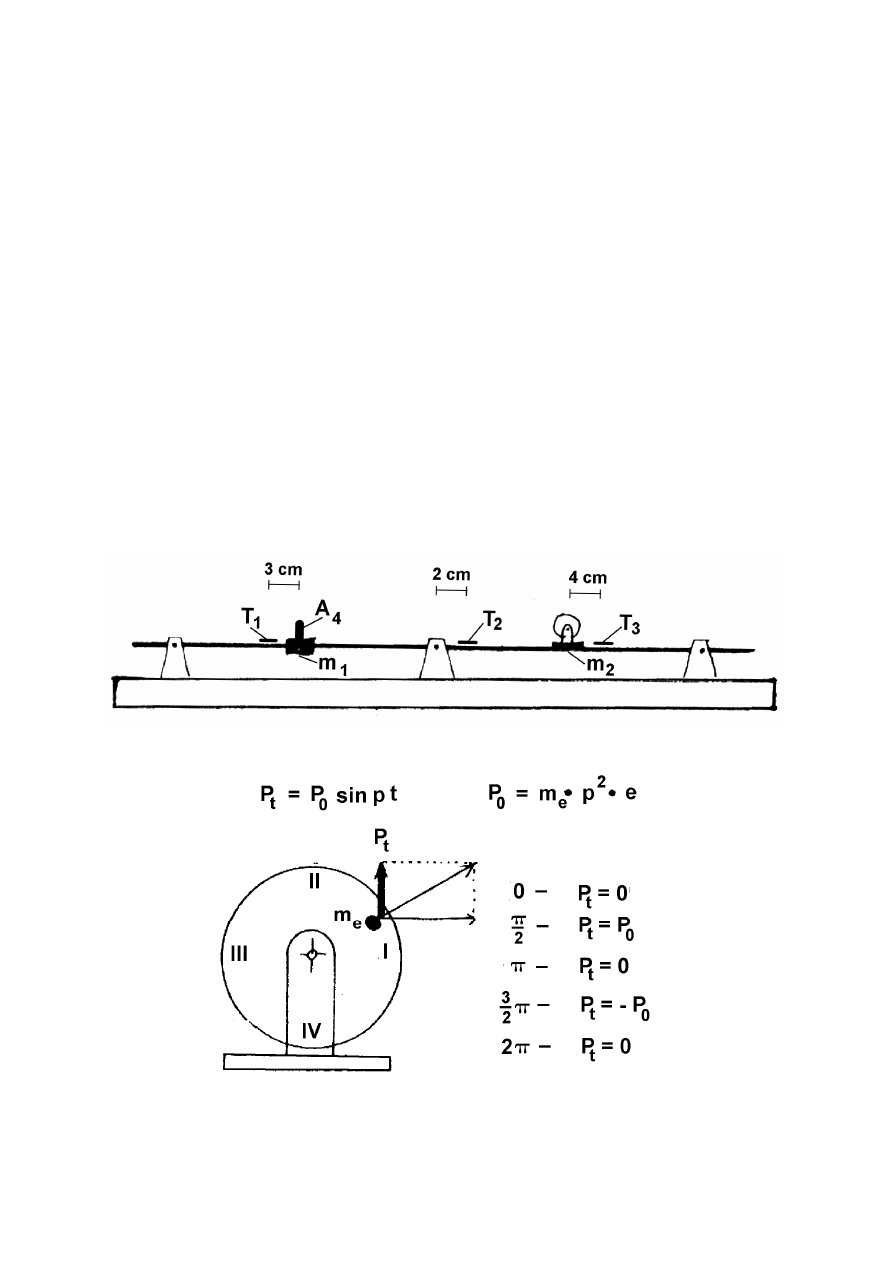
2.
Opis modelu belki (rys. 1)
•
Przypomnienie konstrukcji belki i poszczególnych jej elementów z ćwiczenia nr 4
•
Krótki opis toru pomiarowego (tensometry, akcelerometr, rejestrator)
•
Siły działające na belkę w trakcie drgań (siła wymuszająca od wirującego mimośrodu,
siły ciężkości od mas skupionych, siły bezwładności)
•
Opis poszczególnych faz działania siły wymuszającej m
e
= 7,36g, e = 1,675cm (rys. 2)
Rys. 1.
Rys. 2.
3.
Krótki wstęp teoretyczny
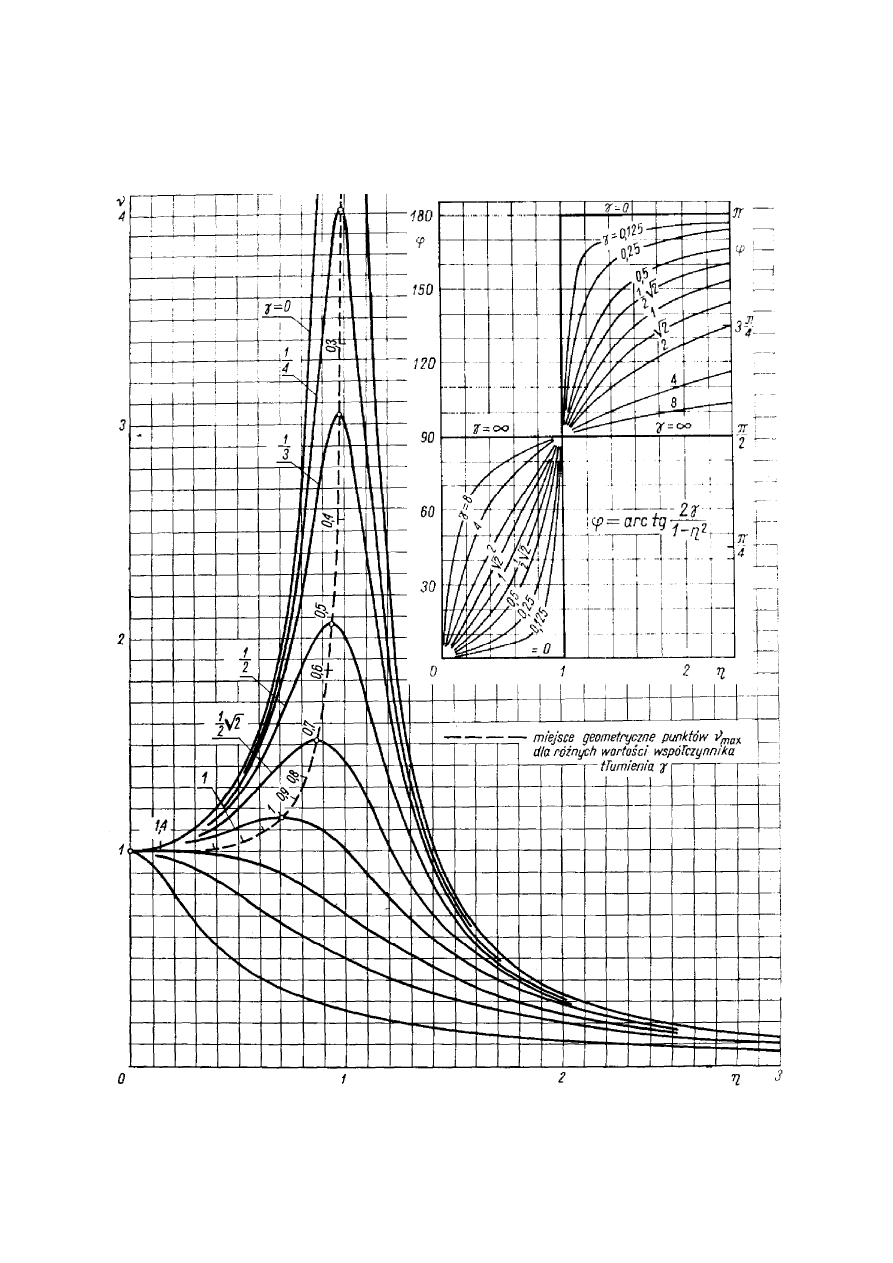
•
Opis pracy konstrukcji w zależności od częstotliwości wymuszających – krzywa
rezonansowa (rys. 3) – amplifikacja wartości amplitud, zmiana fazy, ograniczenie
wielkości amplitud przez tłumienie.
Rys. 3.
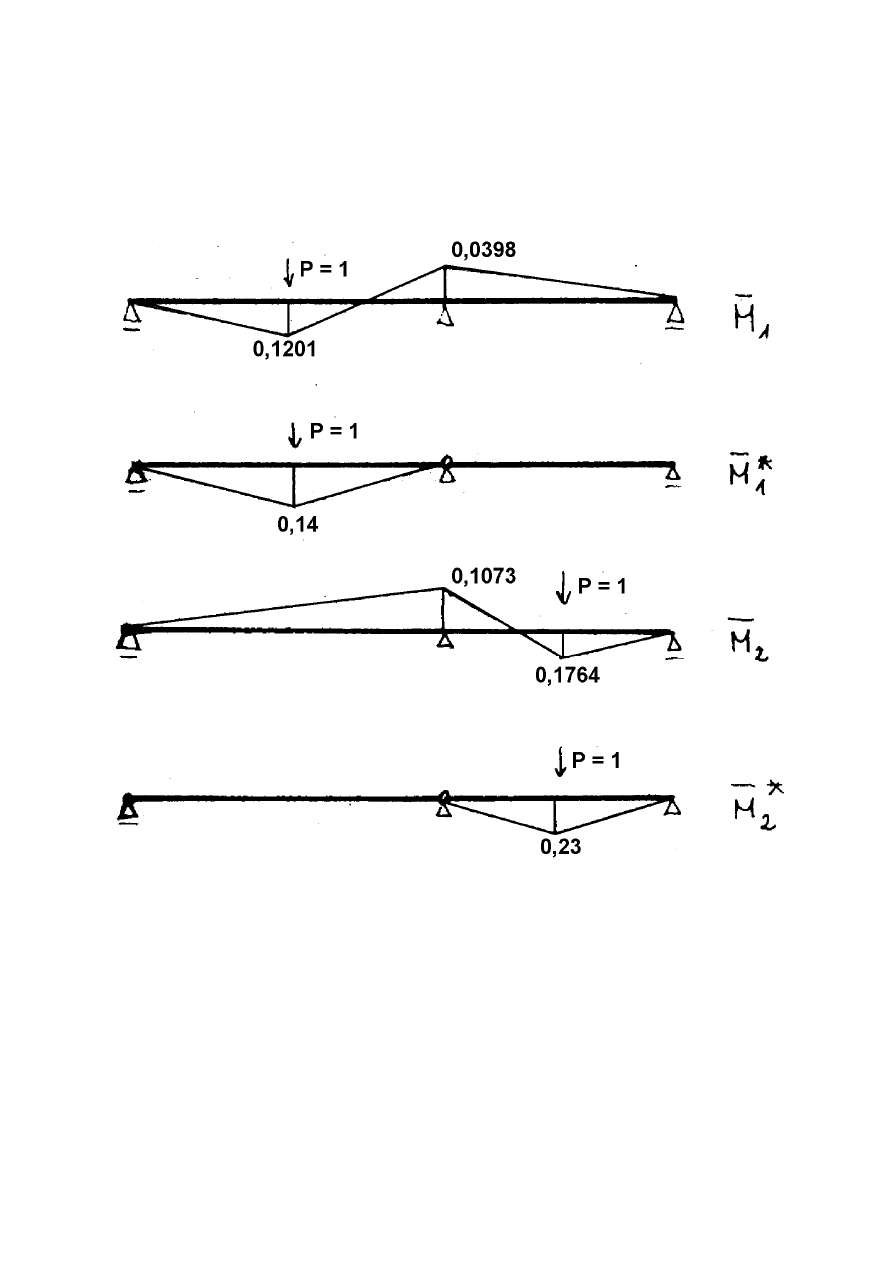
•
Przypomnienie rozwiązania teoretycznego (obliczenie delt dynamicznych – rys. 4,
obliczenie delt modyfikowanych, obliczenie delt od stanu P, rozwiązanie układu równań i
wyznaczenie sił bezwładności X
1
i X
2
dla dodatniej i ujemnej wartości siły P
0
,
narysowanie obwiedni momentów zginających z uwzględnieniem sił ciężkości, siły
wymuszającej i sił bezwładności)
Rys. 4.
•
Uzasadnienie wprowadzenia współczynników korekcyjnych dla tensometrów
(k
1
= 1,12, k
2
= 1,05, k
3
= 1,09), wynikających z nieosiowego umieszczenia tensometrów
na punktach charakterystycznych belki (rys.1)
•
Podanie formuł na obliczenie wartości sił i momentów zginających z danych
pomiarowych
1
)
(
m
a
F
⋅
±
−
=
±
W
E
M
i
i
⋅
⋅
⋅
±
=
±
−
6
10
ε

4.
Przeprowadzenie wymuszenia drgań belki i ich rejestracja
•
Drgania z częstotliwością rezonansową f
1
= 21,7 Hz
•
Drgania z częstotliwością rezonansową f
2
= 45,0 Hz (różnica o 2 Hz w stosunku do
rozwiązania teoretycznego)
•
Drgania z częstotliwością wybraną np. f = 16.6 Hz
5.
Kopiowanie danych z serwera na poszczególne stanowiska (dla każdego stanowiska
zbiory z częstotliwościami rezonansowymi i jedną wybraną częstotliwość z pośród 8
zarejestrowanych uprzednio wymuszeń):
Częstotliwość:
Zbiór:
13.5 Hz
cz13_5.dat
16.6 Hz
cz16_6.dat
24.1 Hz
cz24_1.dat
29.8 Hz
cz29_8.dat
34.0 Hz
cz34.dat
51.2 Hz
cz51_2.dat
55.6 Hz
cz55_6.dat
59.0 Hz
cz 59.dat
I rez 27.1 Hz
cz27_1Ir.dat
II rez 45.0 Hz
cz 45IIr.dat
6.
Samodzielne opracowanie wyników pomiarów przez studentów w oparciu o program
komputerowy (Mathcad) – pola niebieskie to wzory, pola żółte to wyniki obliczeń, pola
zielone to miejsce gdzie student wprowadza dane i odczytuje do sprawozdania
(a)
Zadana częstotliwość wymuszająca
•
Wprowadzenie
do
obliczeń
teoretycznych
analizowanej
częstotliwości
wymuszenia (wybranej przez prowadzącego z pośród ośmiu)
•
Wprowadzenie nazwy zbioru pomiarowego (*.dat) odpowiadającego wybranej
częstotliwości
•
W razie potrzeby wprowadzenie filtracji dolnoprzepustowej dla porównania jej
wpływu na zmianę wyników
•
Odczyt maksymalnych wartości momentów zginających i sił bezwładności
•
Odczyt błędu
(b)
Pierwsza częstotliwość rezonansowa
•
Wprowadzenie do obliczeń teoretycznych pierwszej częstotliwości rezonansowej
•
Wprowadzenie nazwy zbioru pomiarowego (*.dat) odpowiadającego wybranej
częstotliwości
•
W razie potrzeby wprowadzenie filtracji dolnoprzepustowej dla porównania jej
wpływu na zmianę wyników
•
Odczyt maksymalnych wartości momentów zginających i sił bezwładności z
pomiaru
(c)
Druga częstotliwość rezonansowa
•
Wprowadzenie do obliczeń teoretycznych drugiej częstotliwości rezonansowej
•
Wprowadzenie nazwy zbioru pomiarowego (*.dat) odpowiadającego wybranej
częstotliwości
•
W razie potrzeby wprowadzenie filtracji dolnoprzepustowej dla porównania jej
wpływu na zmianę wyników
•
Odczyt maksymalnych wartości momentów zginających i sił bezwładności z
pomiaru
7.
Wykonanie sprawozdania i zaliczenie ćwiczenia
Wyszukiwarka
Podobne podstrony:
Materialy dla uczestnikow K id Nieznany
Materialy dla uczestnikow K id Nieznany
angielski dla sanitariuszy id 6 Nieznany
edukacja dla bezpieczenstwa id Nieznany
Poetyka material na egzamin id Nieznany
materialy dla studentow polisac Nieznany
Materialy dydaktyczne FIZYKA id Nieznany
materialy wykladowe wyk13 d id Nieznany
Business English dla kazdego id Nieznany
materialy wykladowe wyk9 d id 7 Nieznany
materialy do wykladow 1 i 2 id Nieznany
angielski dla pielegniarek id 6 Nieznany
Materialy dla sluchaczy cwiczen Nieznany
1 Tablice (materialy ITA 104)id Nieznany (2)
macierze dla przedszkolakow id Nieznany
materialy wykladowe wyk11 d id Nieznany
Materialy szkoleniowe OTWP id 2 Nieznany
materialy FUTURA EDUKACJA 2 id Nieznany
więcej podobnych podstron