DIRECT TORQUE CONTROL METHODS
FOR PWM INVERTER-FED INDUCTION
MOTOR DRIVES – A SURVEY
Marian P. Kazmierkowski
Institute of Control and Industrial Electronics
Warsaw University of Technology
PELINCEC Seminar, 28 Dec., 2004
WARSAW UNIVERSITY OF TECHNOLOGY
FACULTY OF ELECTRICAL ENGINEERING
Institute of Control and Industrial Electronics
00-662 Warszawa , ul.Koszykowa 75 Tel. (+ 48 22) 628 06 65 , Fax (+ 48 22) 625 66 33
OUTLINE
•
Introduction
•
Basic concepts
•
Generic DTC scheme
•
Switching Table DTC (ST-DTC)
•
Basic DSC scheme
•
Constant switching frequency DTC
•
Variants of DTC-SVM
•
Selected results
•
Conclusions
PELINCEC Seminar, 28 Dec., 2004
WARSAW UNIVERSITY OF TECHNOLOGY
FACULTY OF ELECTRICAL ENGINEERING
Institute of Control and Industrial Electronics
00-662 Warszawa , ul.Koszykowa 75 Tel. (+ 48 22) 628 06 65 , Fax (+ 48 22) 625 66 33
Marian P. Kazmierkowski
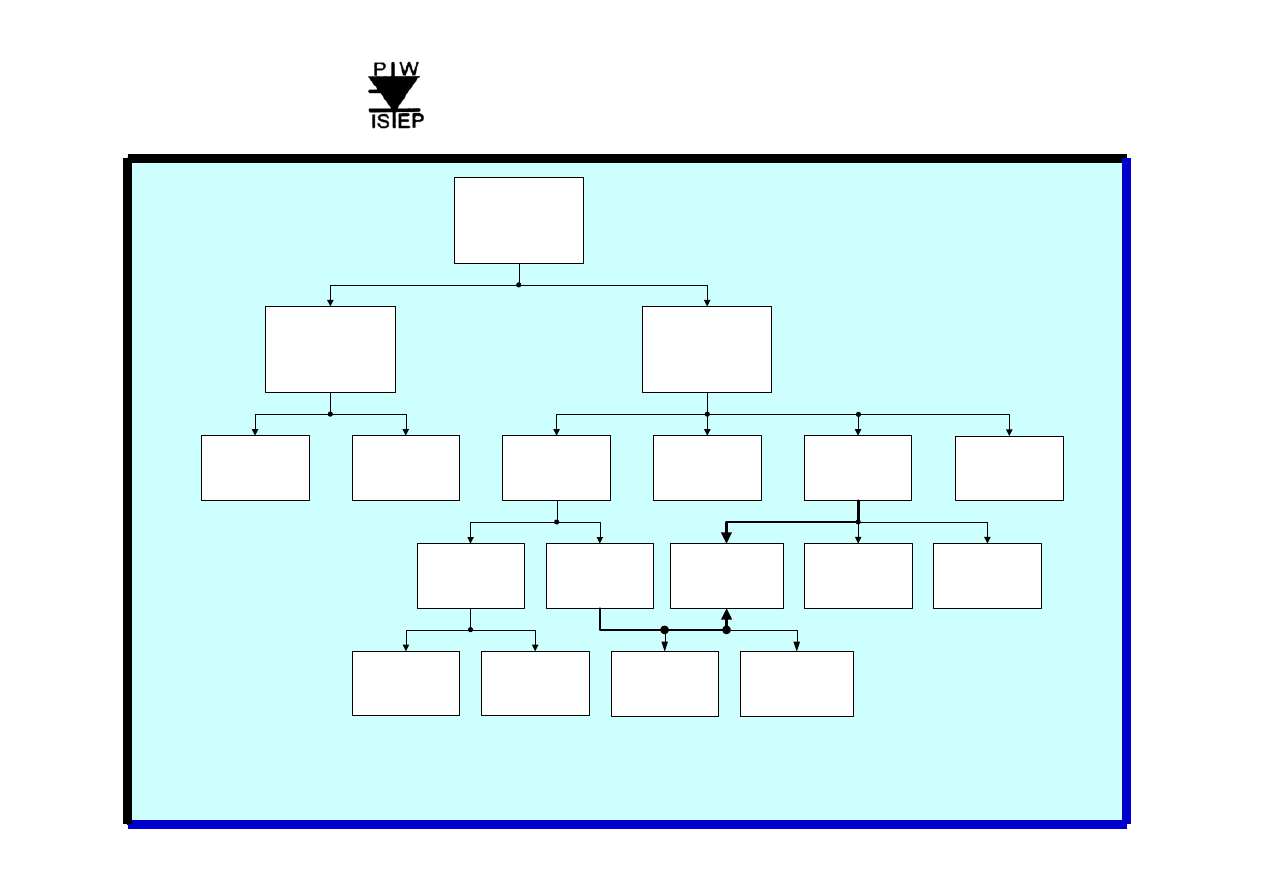
Classification of IM control methods
Variable
Frequency
Control
Scalar based
controllers
Vector based
controller
U/f=const
Direct
(Blaschke)
Field Oriented
Direct Torque
Control
Feedback
Linearisation
Indirect
(Hasse)
Circle flux
trajectory
(Takahashi)
Hexagon flux
trajectory
(Depenbrock)
Stator Flux
Oriented
Rotor Flux
Oriented
Direct Torque
Space - Vector
Modulation
Passivity
Based Control
Closed Loop
Flux & Torque
Control
( )
r
s
f
i
ω
=
Open Loop
NFO
(Jonsson)
..
PELINCEC Seminar, 28 Dec., 2004
WARSAW UNIVERSITY OF TECHNOLOGY
FACULTY OF ELECTRICAL ENGINEERING
Institute of Control and Industrial Electronics
00-662 Warszawa , ul.Koszykowa 75 Tel. (+ 48 22) 628 06 65 , Fax (+ 48 22) 625 66 33
Marian P. Kazmierkowski
Remark
Since there is no commonly shared terminology
regarding DTC, in this work under DTC scheme
we refer to control schemes operating with closed
torque and flux loops without current controllers.
PELINCEC Seminar, 28 Dec., 2004
WARSAW UNIVERSITY OF TECHNOLOGY
FACULTY OF ELECTRICAL ENGINEERING
Institute of Control and Industrial Electronics
00-662 Warszawa , ul.Koszykowa 75 Tel. (+ 48 22) 628 06 65 , Fax (+ 48 22) 625 66 33
Marian P. Kazmierkowski
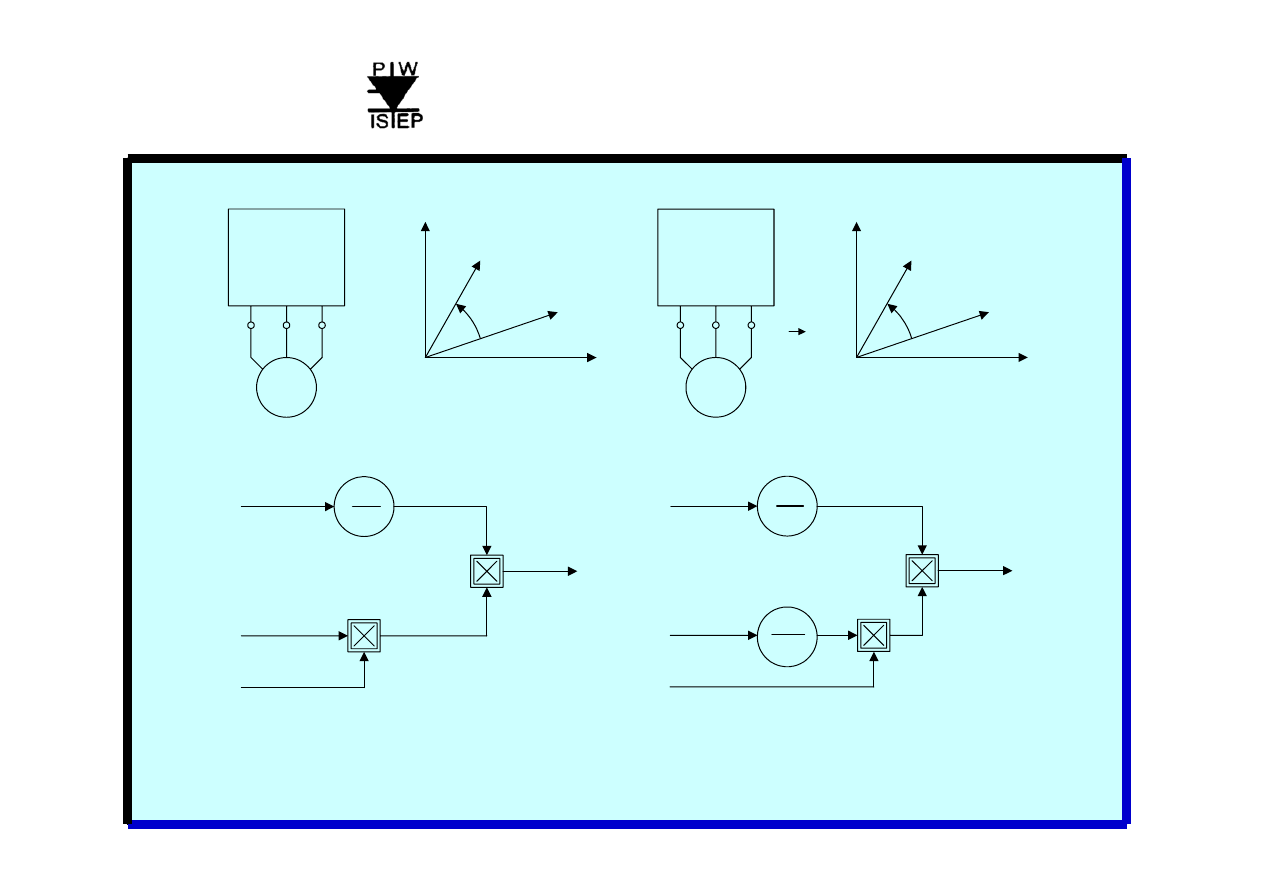
Torque production: (a) field-oriented control, (b) direct torque control
M
r
l
l
r
ψ
s
i
δ
sin
e
m
M
r
l
l
Ψ
δ
sin
1
s
l
σ
e
m
s
ψ
r
ψ
(a)
IM
CC-PWM-VSI
α
β
r
ψ
δ
i
s
i
s
(b)
s
u
s
ψ
IM
PWM-VSI
α
β
Ψ
δ
s
ψ
r
ψ
PELINCEC Seminar, 28 Dec., 2004
WARSAW UNIVERSITY OF TECHNOLOGY
FACULTY OF ELECTRICAL ENGINEERING
Institute of Control and Industrial Electronics
00-662 Warszawa , ul.Koszykowa 75 Tel. (+ 48 22) 628 06 65 , Fax (+ 48 22) 625 66 33
Marian P. Kazmierkowski
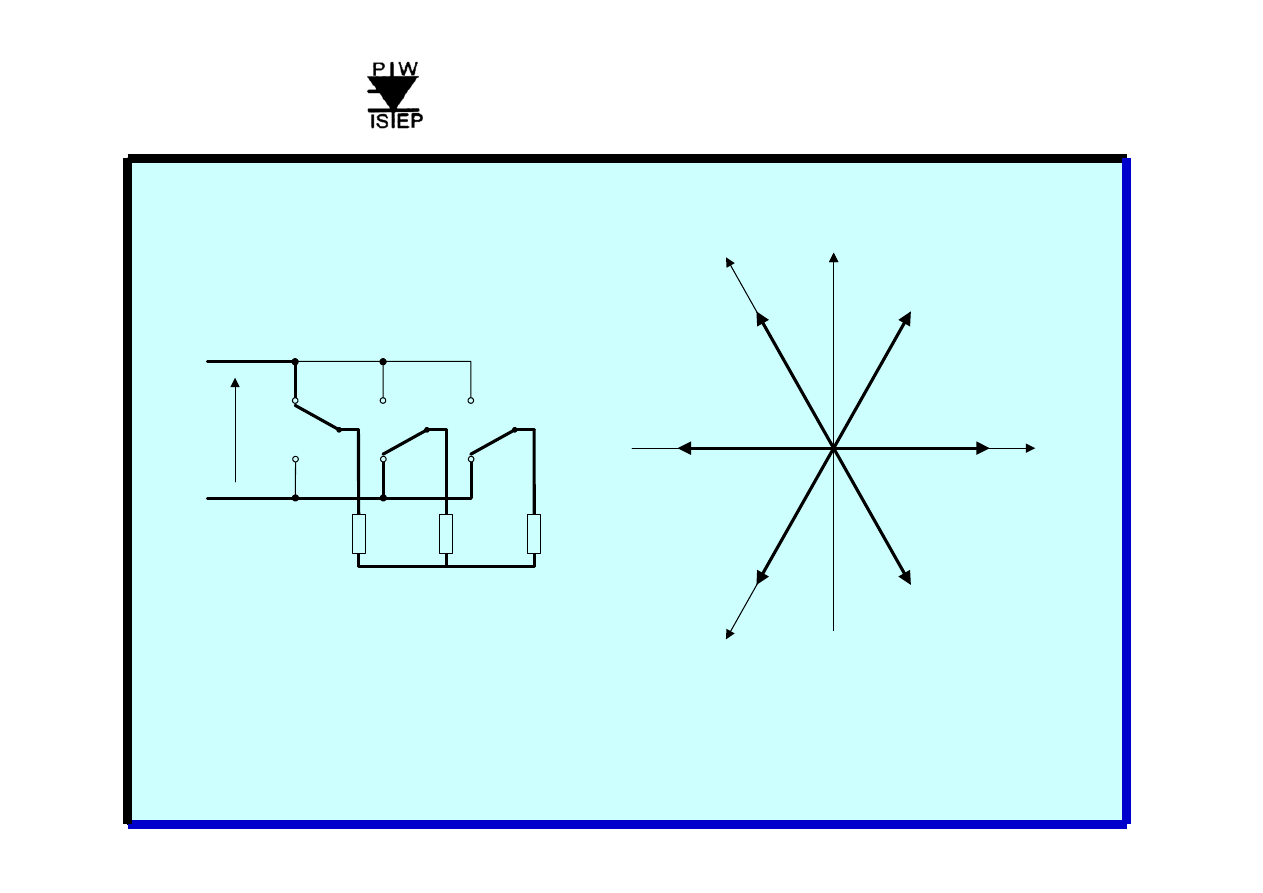
(a) Simplified diagram of the VS inverter feeding an induction motor; (b)
representation of output voltage vectors
a)
b)
u
1
(100)
u
7
(111)
u
0
(000)
α
β
A
B
C
u
2
(110)
u
3
(010)
u
4
(011)
u
5
(001)
u
6
(101)
U
B
U
dc
1
1
1
0
0
0
U
A
U
C
PELINCEC Seminar, 28 Dec., 2004
WARSAW UNIVERSITY OF TECHNOLOGY
FACULTY OF ELECTRICAL ENGINEERING
Institute of Control and Industrial Electronics
00-662 Warszawa , ul.Koszykowa 75 Tel. (+ 48 22) 628 06 65 , Fax (+ 48 22) 625 66 33
Marian P. Kazmierkowski
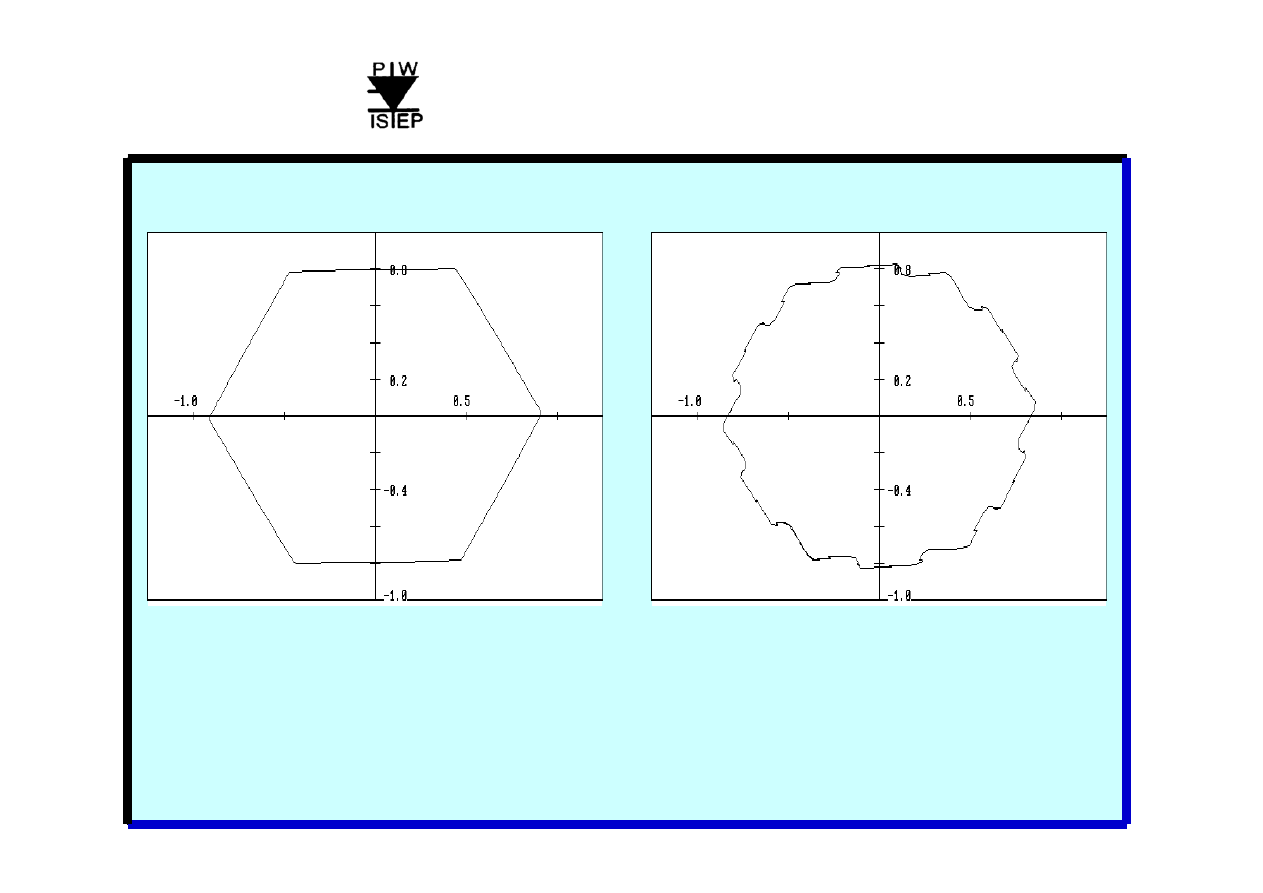
Stator flux path in
α-β plane (a) under six-step operation and (b) under
sinusoidal PWM operation (low switching frequency)
a)
b)
α
β
ψ
s
α
β
s
ψ
PELINCEC Seminar, 28 Dec., 2004
WARSAW UNIVERSITY OF TECHNOLOGY
FACULTY OF ELECTRICAL ENGINEERING
Institute of Control and Industrial Electronics
00-662 Warszawa , ul.Koszykowa 75 Tel. (+ 48 22) 628 06 65 , Fax (+ 48 22) 625 66 33
Marian P. Kazmierkowski
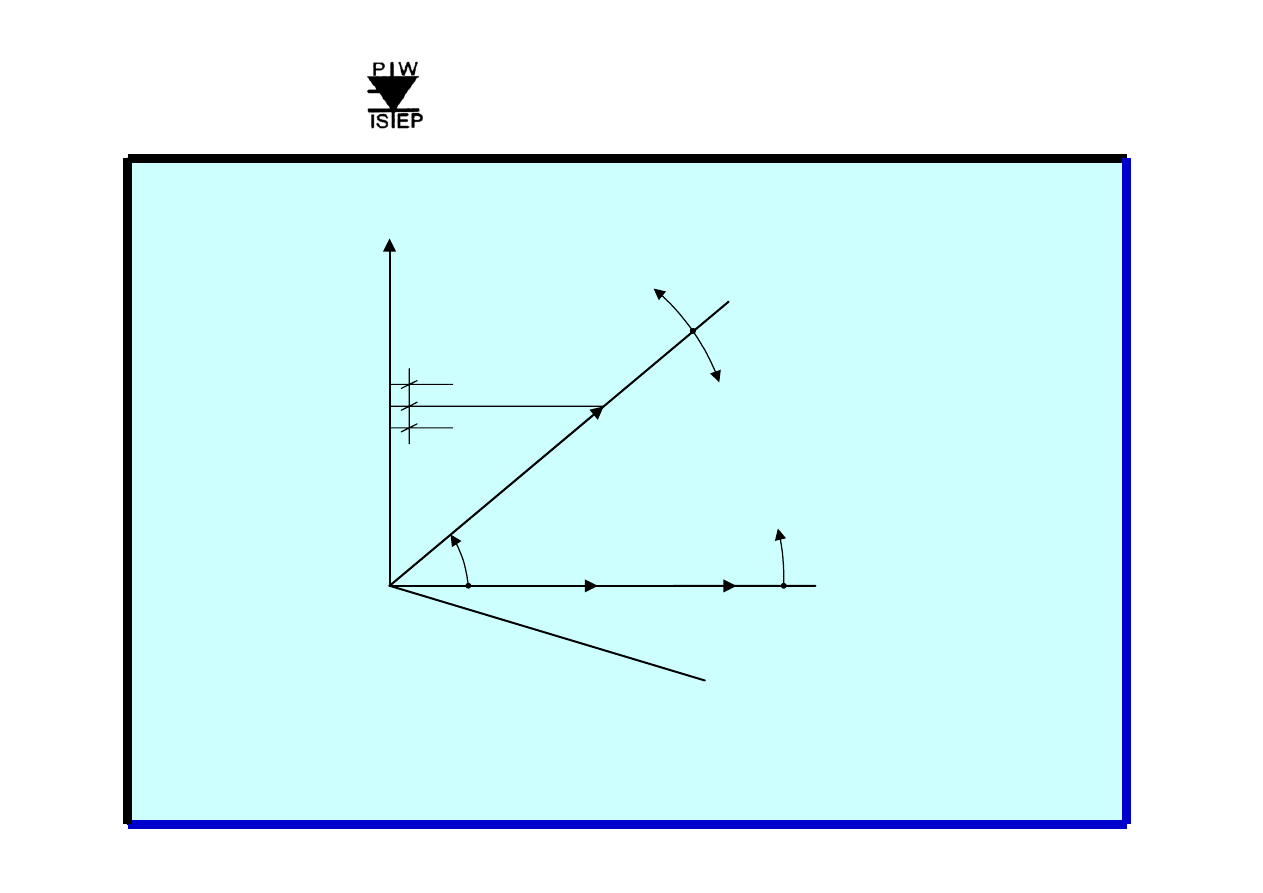
Stator flux vector movement relative to rotor flux vector
under the influence of active and zero voltage vectors
stops with zero
vector
moment with active
forward vector
moment with active
backward vector
rotates
continuously
Ψ
δ
s
ψ
r
ψ
d
α
stator
m
H
−
m
H
+
q
sq
e
m
ψ
~
PELINCEC Seminar, 28 Dec., 2004
WARSAW UNIVERSITY OF TECHNOLOGY
FACULTY OF ELECTRICAL ENGINEERING
Institute of Control and Industrial Electronics
00-662 Warszawa , ul.Koszykowa 75 Tel. (+ 48 22) 628 06 65 , Fax (+ 48 22) 625 66 33
Marian P. Kazmierkowski
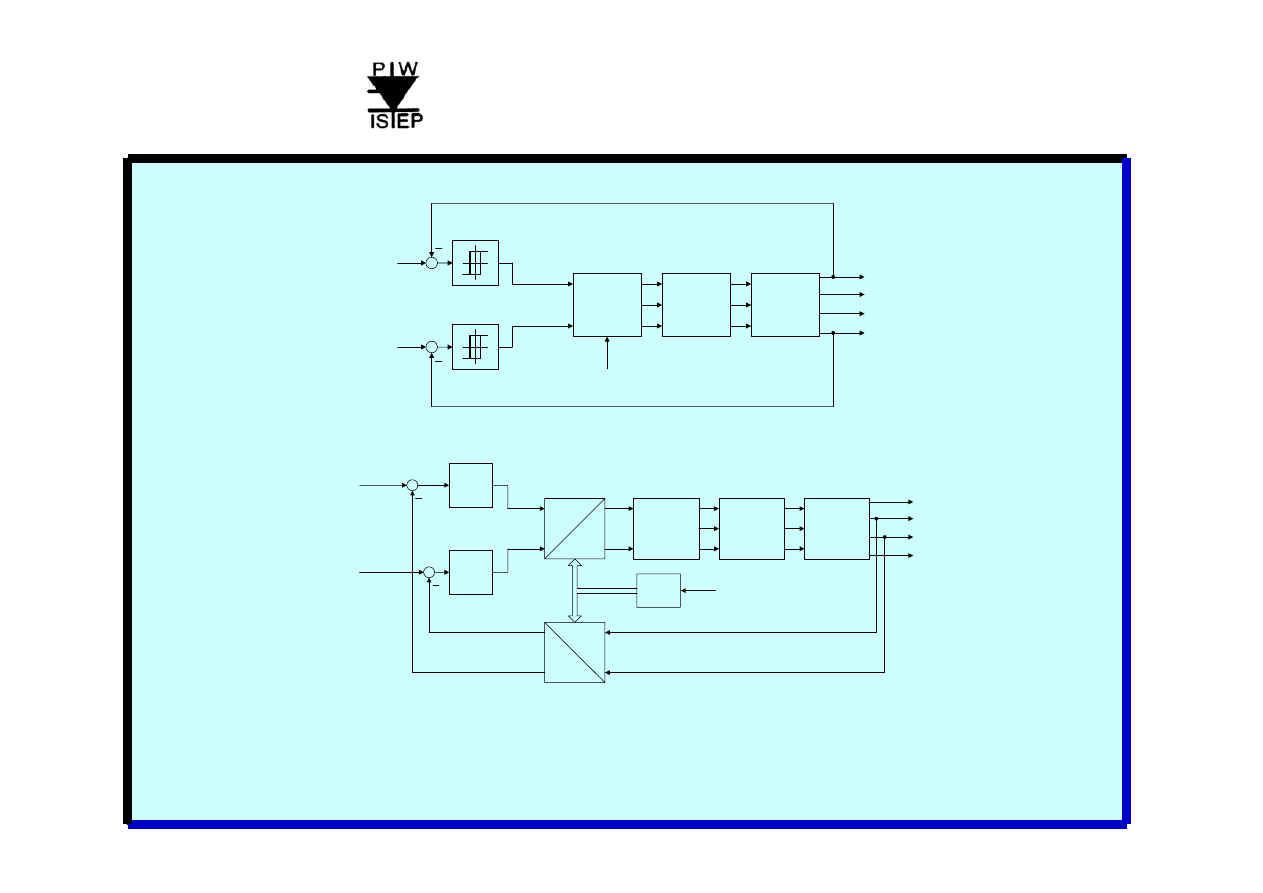
Two schemes of PWM inverter-fed induction motor with: a) direct
torque and stator flux control (DTC), b) field oriented control (FOC)
a)
b)
u
A
u
B
u
C
Flux
Controller
Active
Vectors
Zero
Vectors
Torque
Controller
Voltage
Vector
Selection
VS
PWM
Inverter
Induction
Motor
S
A
S
B
S
C
c
m
α
s
i
e
m
β
s
i
sc
ψ
s
ψ
Ν(γ
s
)
u
A
u
B
u
C
Coordinate
Transformation
SVM
VS
PWM
Inverter
Induction
Motor
r
γ
S
A
S
B
S
C
q
d
−
β
α −
c
s
U
α
c
s
U
β
q
d
−
β
α −
sin
cos
sq
i
sd
i
α
s
i
e
m
β
s
i
Flux Current
Controller
PI
sdc
i
~
sdc
U
Torque Current
Controller
PI
sqc
c
i
m ~
sqc
U
sc
ψ
s
ψ
PELINCEC Seminar, 28 Dec., 2004
WARSAW UNIVERSITY OF TECHNOLOGY
FACULTY OF ELECTRICAL ENGINEERING
Institute of Control and Industrial Electronics
00-662 Warszawa , ul.Koszykowa 75 Tel. (+ 48 22) 628 06 65 , Fax (+ 48 22) 625 66 33
Marian P. Kazmierkowski
PELINCEC Seminar, 28 Dec., 2004
PEMC ’94: K. Hasse, B.K. Bose, M.P. Kazmierkowski
WARSAW UNIVERSITY OF TECHNOLOGY
FACULTY OF ELECTRICAL ENGINEERING
Institute of Control and Industrial Electronics
00-662 Warszawa , ul.Koszykowa 75 Tel. (+ 48 22) 628 06 65 , Fax (+ 48 22) 625 66 33
WARSAW UNIVERSITY OF TECHNOLOGY
FACULTY OF ELECTRICAL ENGINEERING
Institute of Control and Industrial Electronics
00-662 Warszawa , ul.Koszykowa 75 Tel. (+ 48 22) 628 06 65 , Fax (+ 48 22) 625 66 33
Marian P. Kazmierkowski
Sector definition for circular (a) and hexagonal (b) stator flux
vector path
a)
b)
sector 4
sector 1
sector 2
sector 3
sector 5
sector 6
u
1
u
3
u
5
u
7
u
2
u
0
u
6
u
4
α
β
sector 4
sector 1
sector 2
sector 3
sector 5
sector 6
u
1
u
3
u
5
u
7
u
2
u
0
u
6
u
4
α
β
PELINCEC Seminar, 28 Dec., 2004

Marian P. Kazmierkowski
PELINCEC Seminar, 28 Dec., 2004
IECON ’97: P.Z. Grabowski, I. Takahashi, M.P. Kazmierkowski
WARSAW UNIVERSITY OF TECHNOLOGY
FACULTY OF ELECTRICAL ENGINEERING
Institute of Control and Industrial Electronics
00-662 Warszawa , ul.Koszykowa 75 Tel. (+ 48 22) 628 06 65 , Fax (+ 48 22) 625 66 33
Marian P. Kazmierkowski
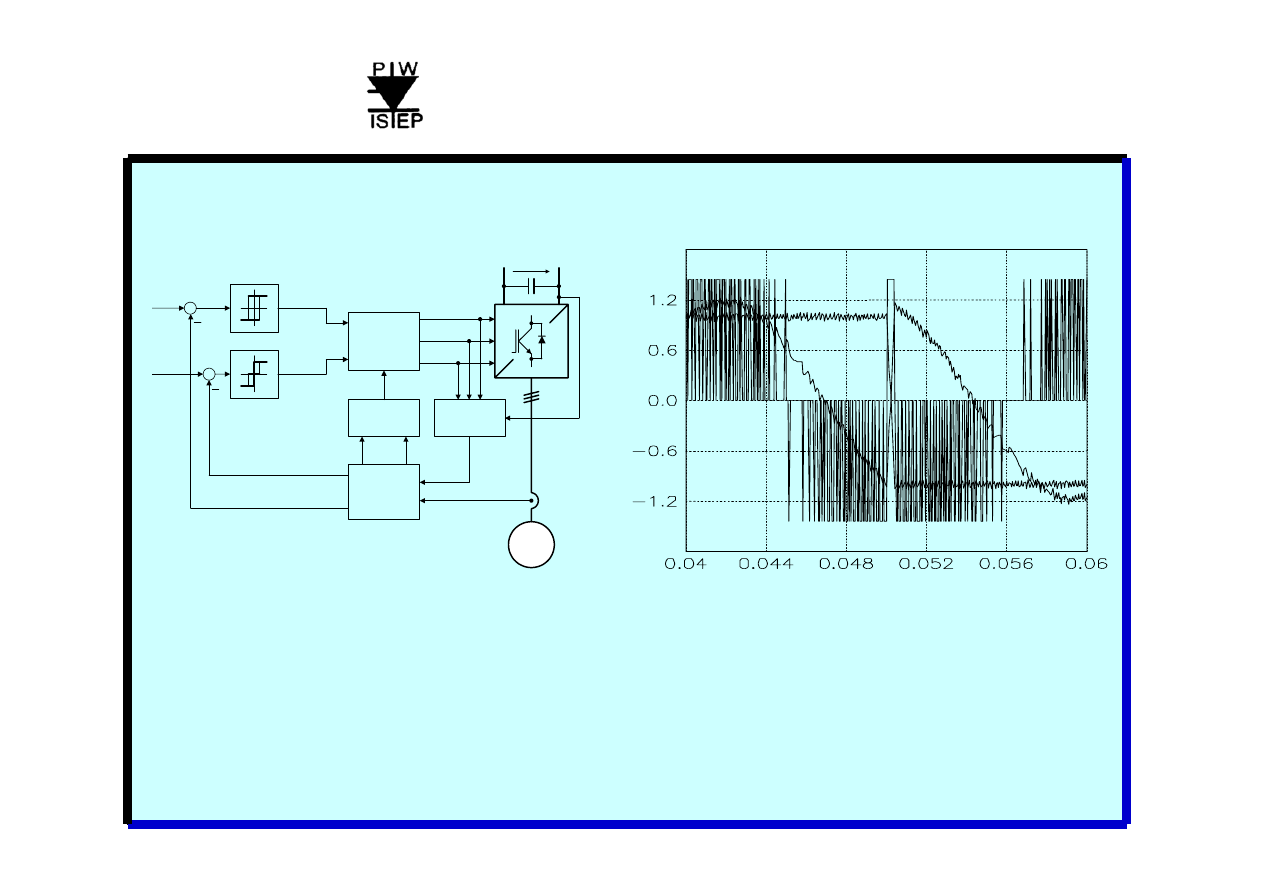
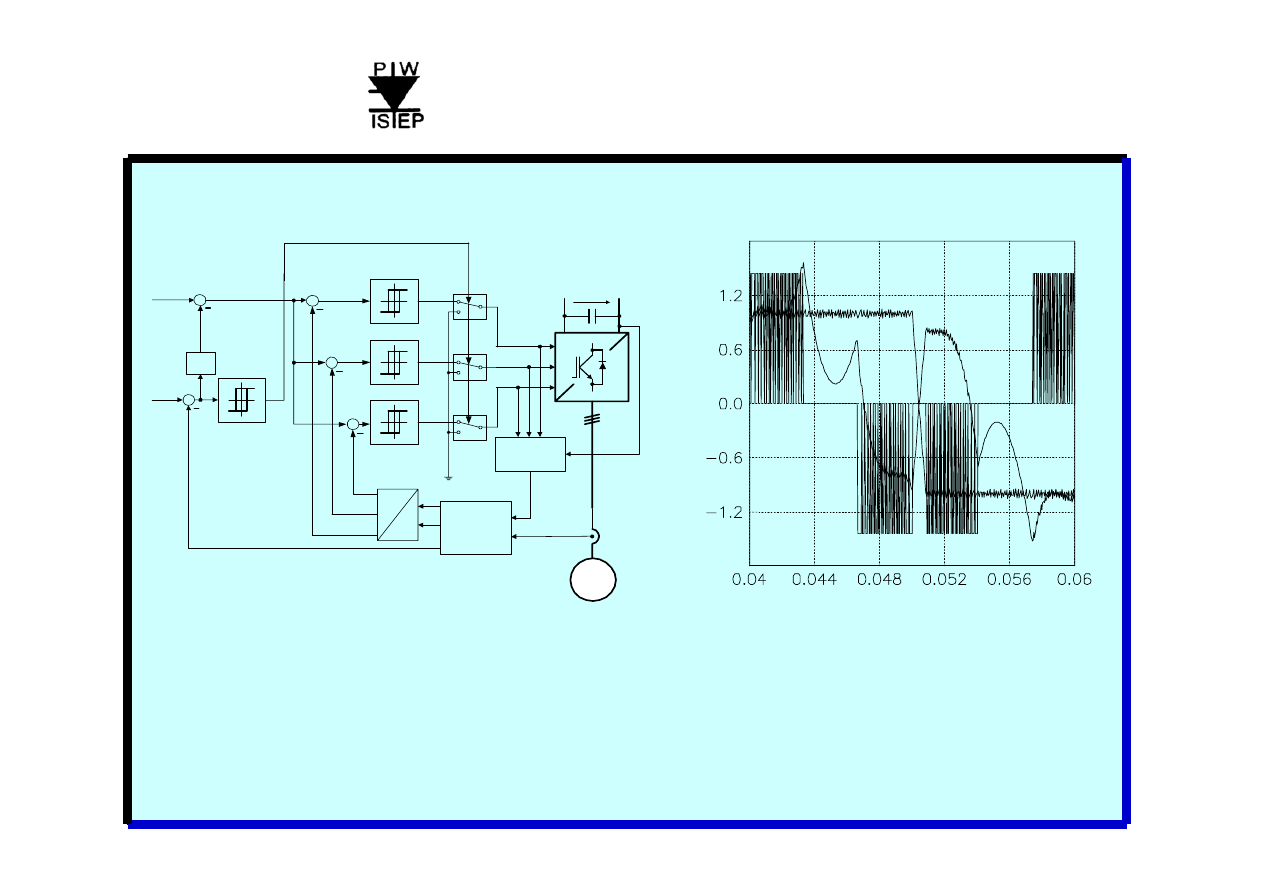
Switching Table Based DTC with circular stator flux path according to
Takahashi and Nogouchi (a) block scheme, (b) transient response to
rated torque reversal
a)
b)
s
i
e
m
S
A
S
B
S
C
U
dc
Motor
Torque
Controller
c
m
Flux
Controller
sc
ψ
Ψ
d
m
d
s
u
Voltage
Calculation
Vector
Selection
Table
)
(
s
N
γ
Sector
Detection
Flux and
Torque
estimator
α
ψ
s
β
ψ
s
s
ψ
u
s
β
m
e
i
s
β
PELINCEC Seminar, 28 Dec., 2004
WARSAW UNIVERSITY OF TECHNOLOGY
FACULTY OF ELECTRICAL ENGINEERING
Institute of Control and Industrial Electronics
00-662 Warszawa , ul.Koszykowa 75 Tel. (+ 48 22) 628 06 65 , Fax (+ 48 22) 625 66 33
Marian P. Kazmierkowski
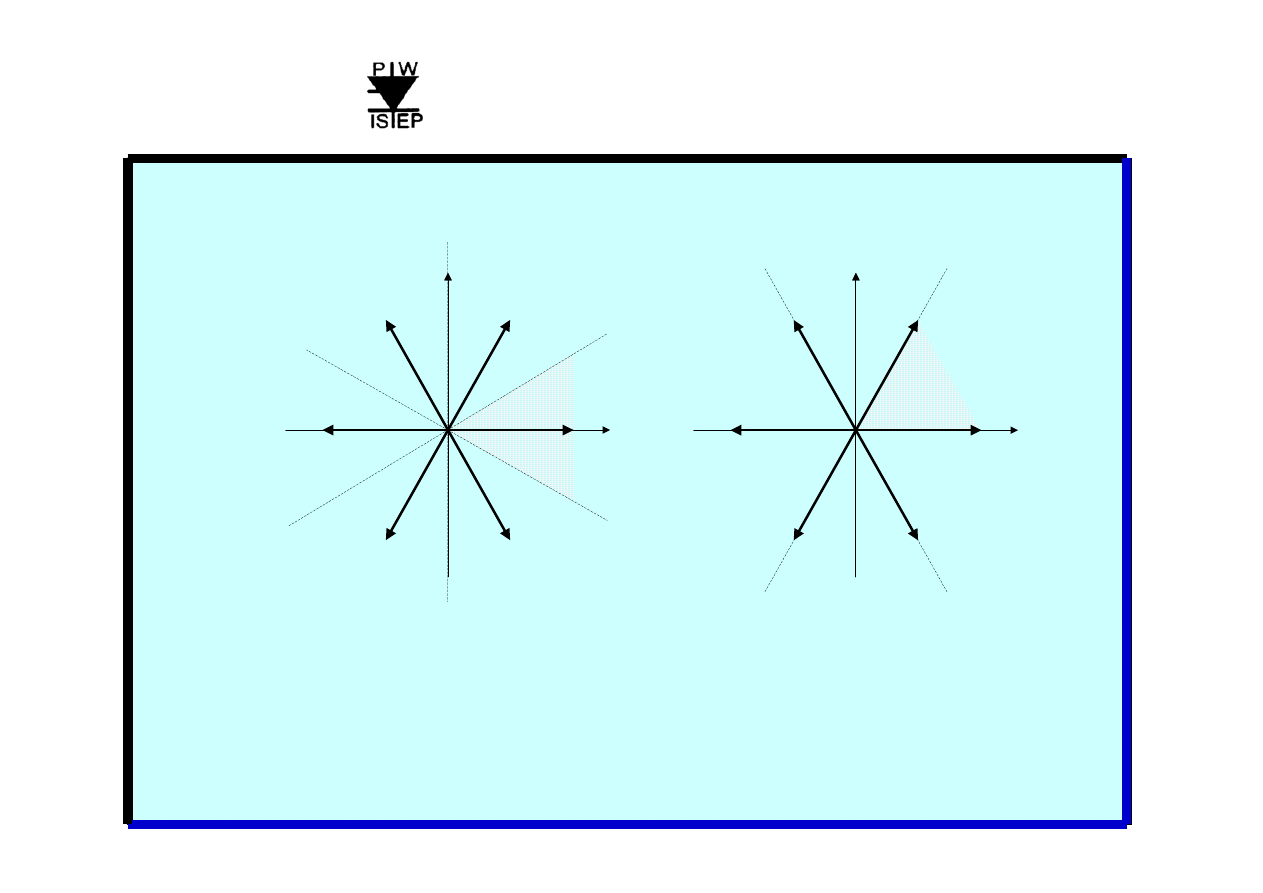
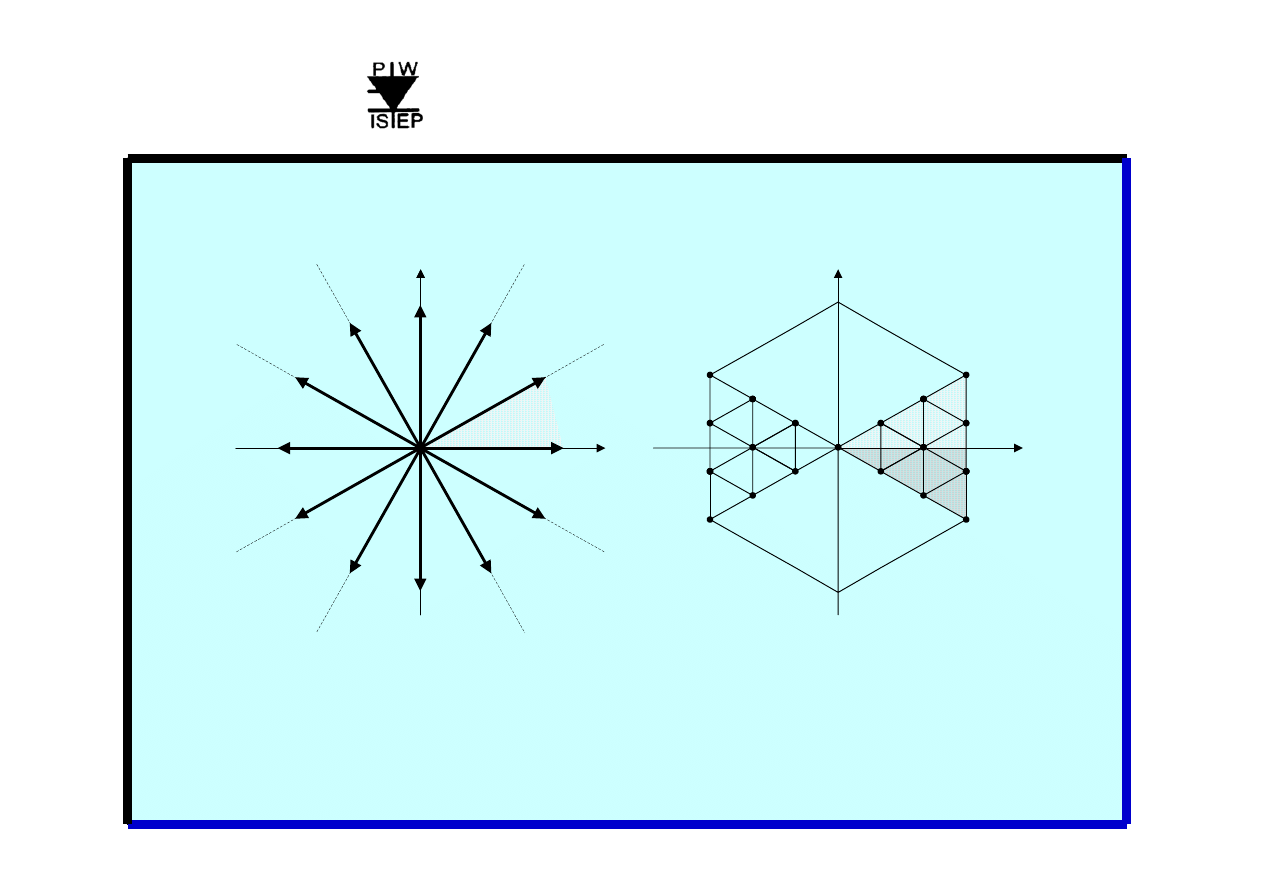
Voltage vectors generated with two (a) and three (b) equal
time intervals per cycle period
a)
b)
sector 1
+
sector 1
-
α
β
sector 4
sector 1
sector 2
sector 3
sector 5
sector 6
u
1
u
3
u
5
u
7
u
2
u
6
u
4
α
β
sector 7
sector 8
sector 9
sector 10
sector 12
sector 12
u
8
u
8
u
9
u
10
u
11
u
12
u
4
PELINCEC Seminar, 28 Dec., 2004
WARSAW UNIVERSITY OF TECHNOLOGY
FACULTY OF ELECTRICAL ENGINEERING
Institute of Control and Industrial Electronics
00-662 Warszawa , ul.Koszykowa 75 Tel. (+ 48 22) 628 06 65 , Fax (+ 48 22) 625 66 33

Marian P. Kazmierkowski
PELINCEC Seminar, 28 Dec., 2004
Bachum ‘96: A.Steimel, M.P. Kazmierkowski, M. Depenbrock
WARSAW UNIVERSITY OF TECHNOLOGY
FACULTY OF ELECTRICAL ENGINEERING
Institute of Control and Industrial Electronics
00-662 Warszawa , ul.Koszykowa 75 Tel. (+ 48 22) 628 06 65 , Fax (+ 48 22) 625 66 33
Marian P. Kazmierkowski
DSC with hexagonal stator flux path according to Depenbrock (a)
block scheme (b) transient response to rated torque reversal
a)
b)
s
i
U
dc
Motor
Torque
Controller
c
m
Flux
Comparators
s
u
Voltage
Calculation
sc
ψ
e
m
Flux and
Torque
estimator
A B C
α β
B
s
β
ψ
C
s
β
ψ
α
ψ
s
β
ψ
s
A
d
B
d
C
d
s
ψ
∆
ο
d
PI
S
A
S
B
S
C
A
s
β
ψ
u
sβ
m
e
i
sβ
PELINCEC Seminar, 28 Dec., 2004
WARSAW UNIVERSITY OF TECHNOLOGY
FACULTY OF ELECTRICAL ENGINEERING
Institute of Control and Industrial Electronics
00-662 Warszawa , ul.Koszykowa 75 Tel. (+ 48 22) 628 06 65 , Fax (+ 48 22) 625 66 33
Marian P. Kazmierkowski
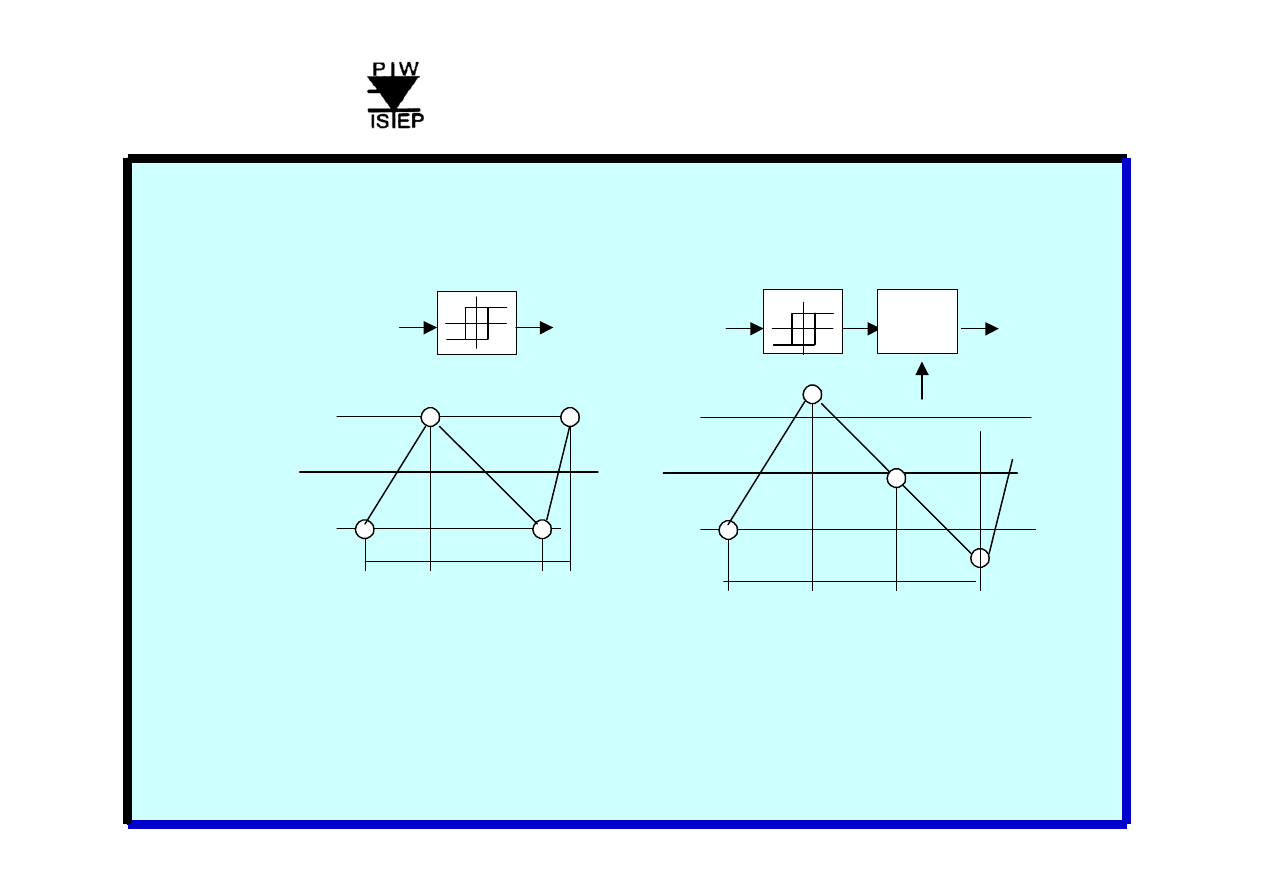
Operation of the analog (a) and discrete (b) hysteresis controller
m
c
- H
m
t
1
t
2
t
3
S / H
1/Ts
m
c
+ H
m
T
s
T
s
T
s
m
c
(a)
(b)
PELINCEC Seminar, 28 Dec., 2004
WARSAW UNIVERSITY OF TECHNOLOGY
FACULTY OF ELECTRICAL ENGINEERING
Institute of Control and Industrial Electronics
00-662 Warszawa , ul.Koszykowa 75 Tel. (+ 48 22) 628 06 65 , Fax (+ 48 22) 625 66 33
Marian P. Kazmierkowski
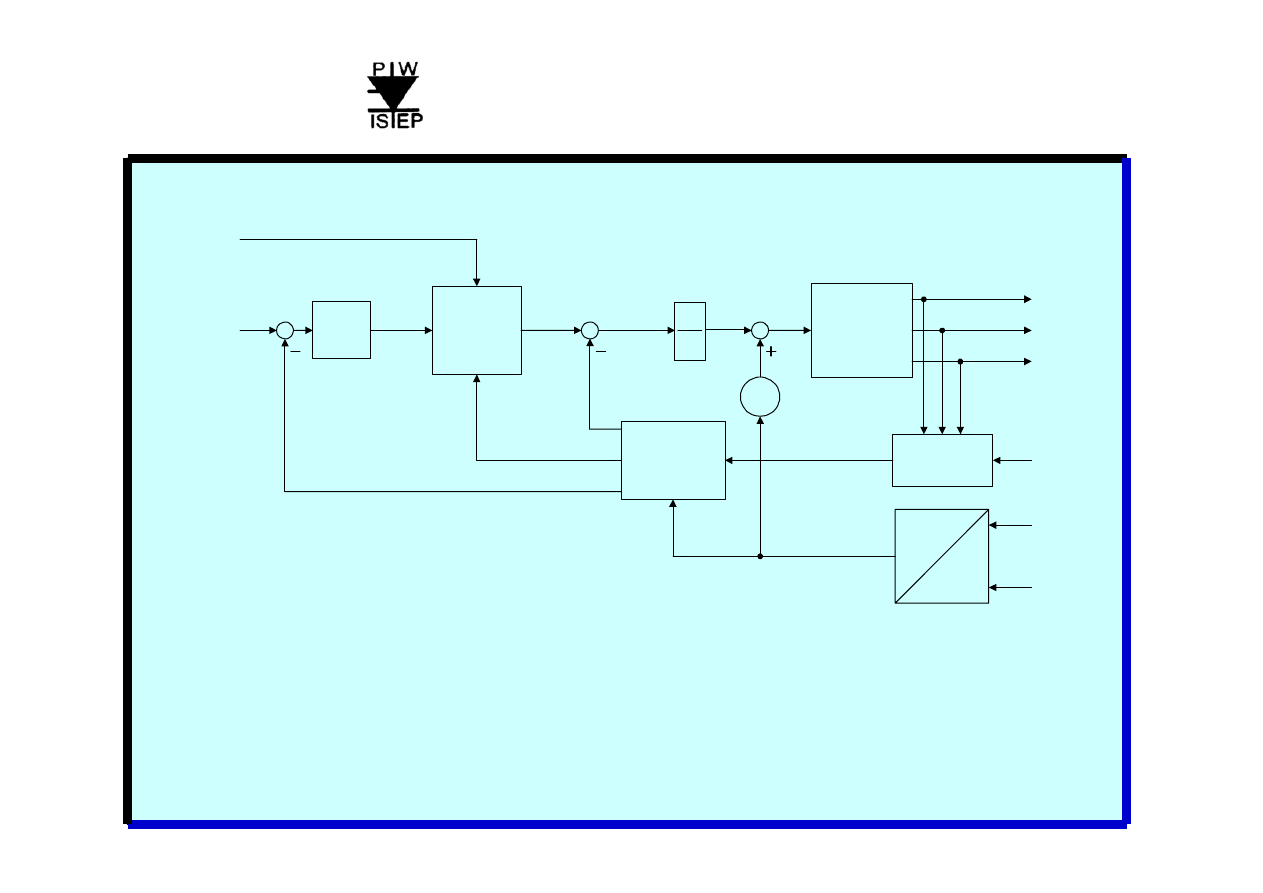
DTC-SVM with closed flux control [D. Casadei et.al.]
sc
ψ
r
γ
S
A
S
B
S
C
SVM
s
r
q
d
−
β
α
−
Eqs (16)
c
m
rc
ψ
Stator Flux
Estimator
U
dc
Voltage
Calculation
A
i
B
i
β
α
−
ABC
Rotor Flux
Estimator
s
ψ
s
ψ
∆
sc
u
s
u
s
i
sdc
ψ
sqc
Ψ
S
N
T
T
PELINCEC Seminar, 28 Dec., 2004
WARSAW UNIVERSITY OF TECHNOLOGY
FACULTY OF ELECTRICAL ENGINEERING
Institute of Control and Industrial Electronics
00-662 Warszawa , ul.Koszykowa 75 Tel. (+ 48 22) 628 06 65 , Fax (+ 48 22) 625 66 33
Marian P. Kazmierkowski
DTC-SVM with closed loop torque control [L.Xu, M.Fu]
Torque
Controller
sc
ψ
s
γ
S
A
S
B
S
C
SVM
s
r
PI
Eq. (18)
c
m
sc
ψ
Flux and
Torque
Estimator
U
dc
Voltage
Calculation
A
i
B
i
β
α
−
ABC
s
ψ
sc
u
s
u
s
i
Ψ
δ
∆
m
S
N
T
T
s
ψ
∆
PELINCEC Seminar, 28 Dec., 2004
WARSAW UNIVERSITY OF TECHNOLOGY
FACULTY OF ELECTRICAL ENGINEERING
Institute of Control and Industrial Electronics
00-662 Warszawa , ul.Koszykowa 75 Tel. (+ 48 22) 628 06 65 , Fax (+ 48 22) 625 66 33
Marian P. Kazmierkowski
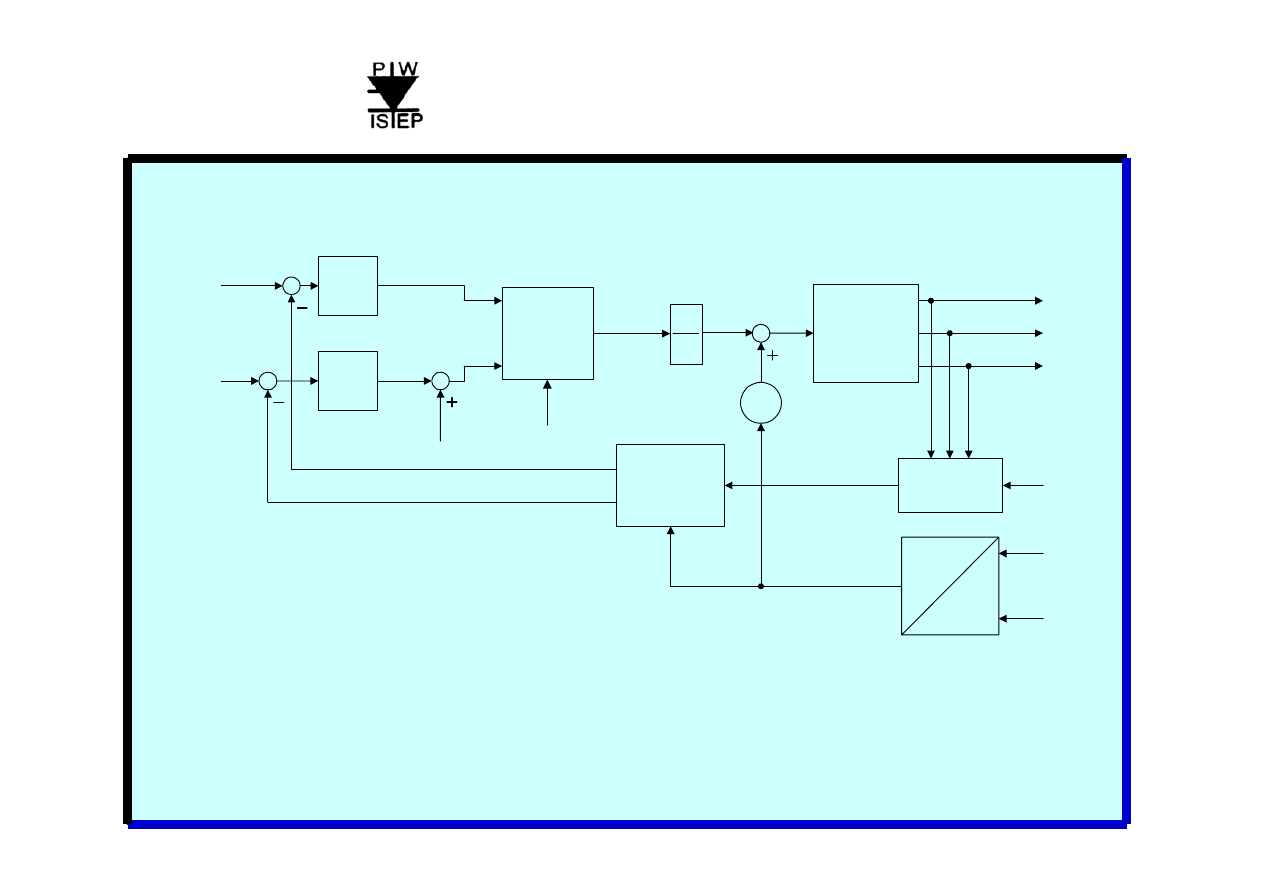
DTC-SVM scheme operated in polar coordinates – ISC
[M.Janecke and F.Hoffman]
sd
γ
∆
S
A
S
B
S
C
SVM
s
r
Eq. (21)
sc
u
Ψ
k
Flux
Controller
Torque
Controller
c
m
sc
ψ
PI
P
s
γ
∆
Flux and
Torque
Estimator
U
dc
Voltage
Calculation
A
i
B
i
β
α
−
ABC
s
u
s
i
m
s
S
N
T
T
s
ψ
∆
ψ
s
γ
ss
γ
∆
PELINCEC Seminar, 28 Dec., 2004
WARSAW UNIVERSITY OF TECHNOLOGY
FACULTY OF ELECTRICAL ENGINEERING
Institute of Control and Industrial Electronics
00-662 Warszawa , ul.Koszykowa 75 Tel. (+ 48 22) 628 06 65 , Fax (+ 48 22) 625 66 33
WARSAW UNIVERSITY OF TECHNOLOGY
FACULTY OF ELECTRICAL ENGINEERING
Institute of Control and Industrial Electronics
00-662 Warszawa , ul.Koszykowa 75 Tel. (+ 48 22) 628 06 65 , Fax (+ 48 22) 625 66 33
Marian P. Kazmierkowski
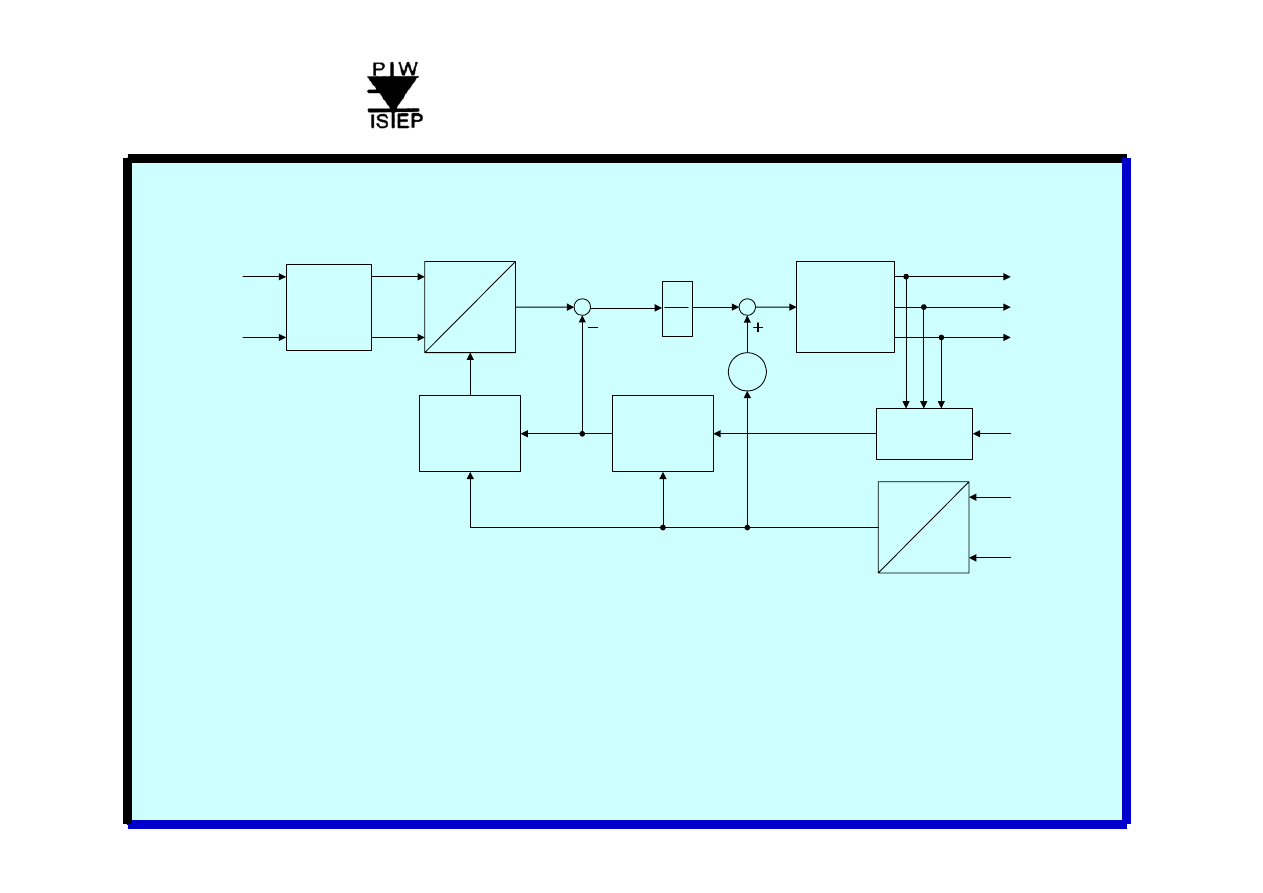
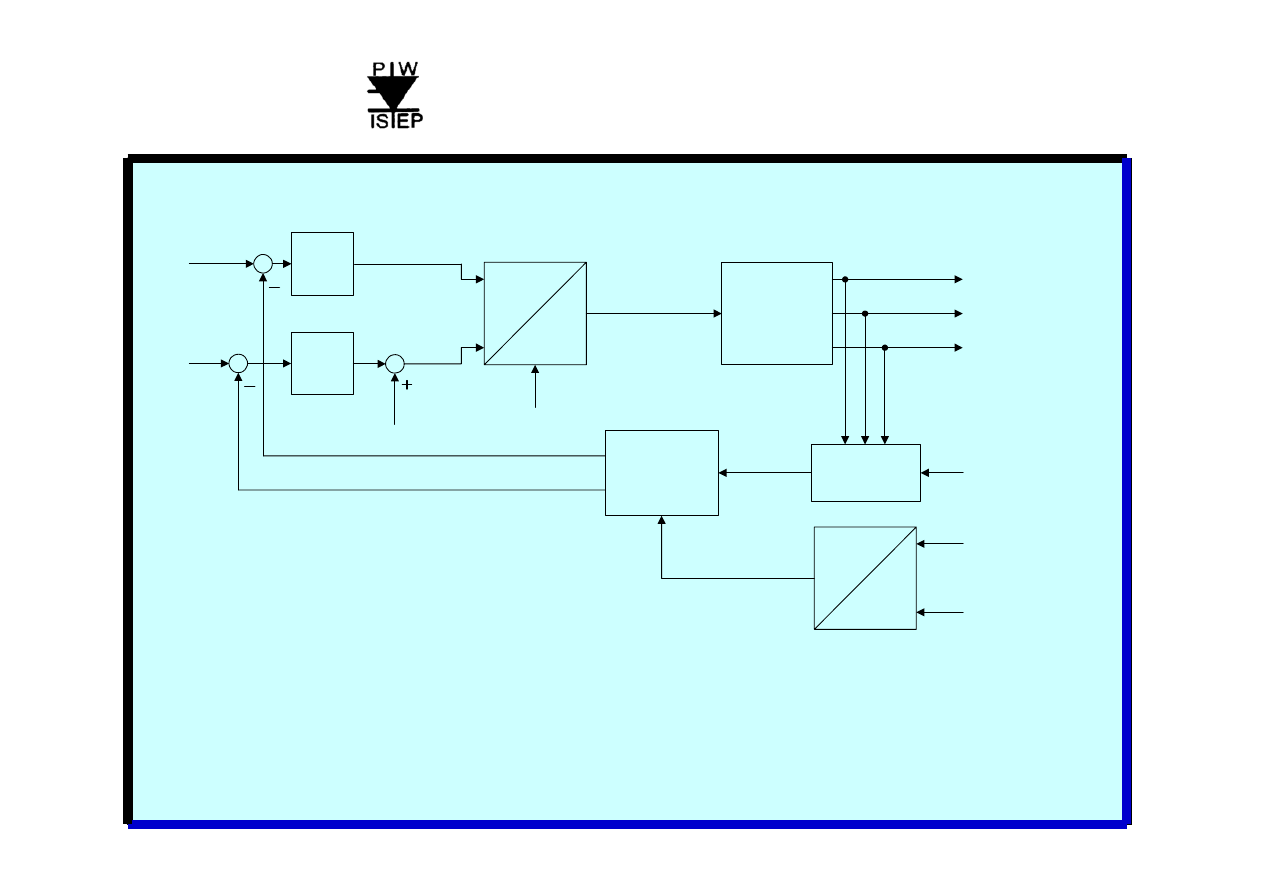
DTC-SVM scheme operated in Cartesian coordinates - Stator Flux
Oriented Control [U.Bader and X.Xue, X.Xu, T.G.Habetler,
D.M.Divan]
S
A
S
B
S
C
SV
M
U
dc
Voltage
Calculation
A
i
B
i
β
α
−
ABC
s
u
s
i
Flux
Controller
Torque
Controller
c
m
sc
ψ
PI
PI
Flux and
Torque
Estimator
q
d
−
β
α
−
m
s
ψ
sc
u
sc
s
ψ
ω
s
γ
sqc
u
sdc
u
PELINCEC Seminar, 28 Dec., 2004
Marian P. Kazmierkowski
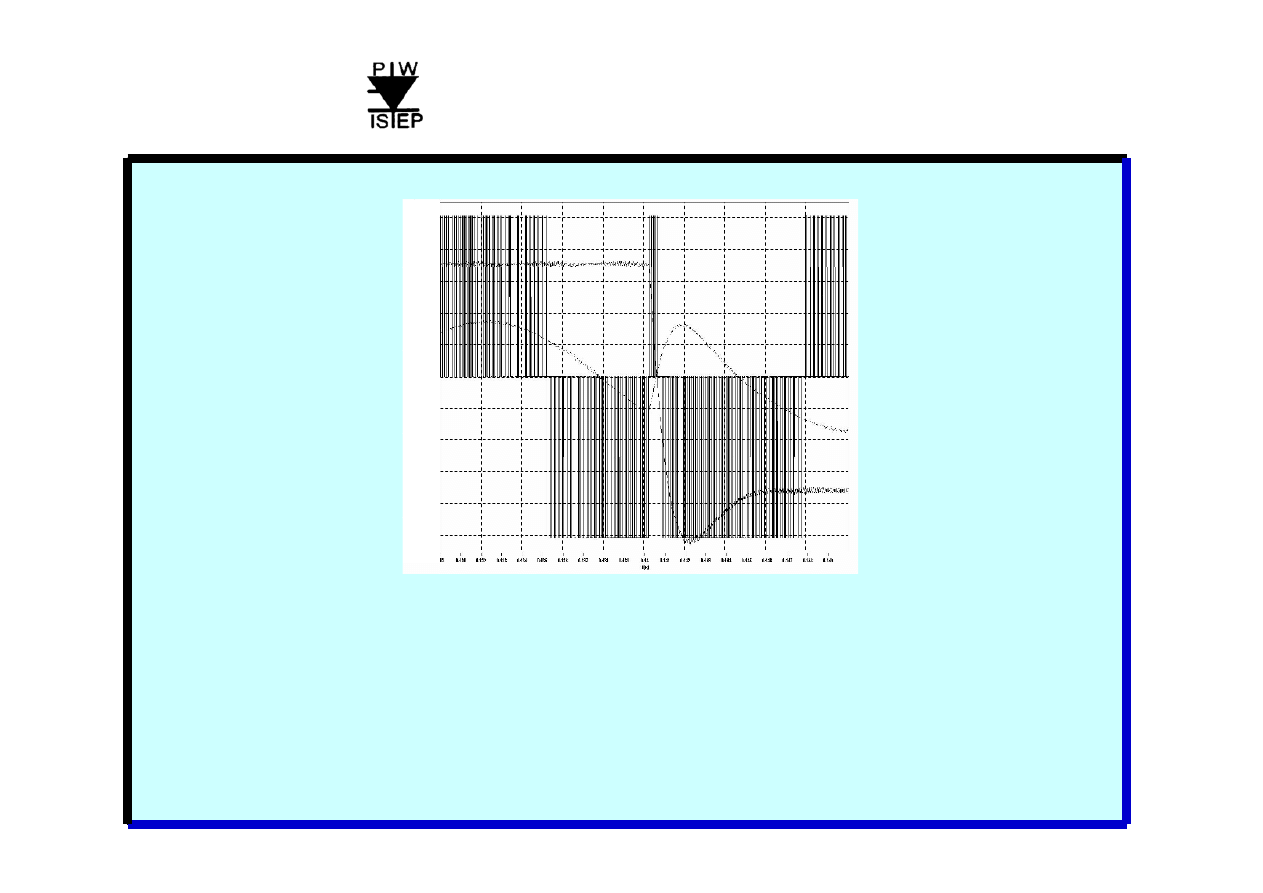
Response to rated torque reversal of the DTC-SVM scheme
operated in Cartesian coordinates
0.0
1.0
0.8
0.6
0.4
0.2
-1.0
-0.8
-0.6
-0.4
-0.2
us
β
me
is
β
PELINCEC Seminar, 28 Dec., 2004
WARSAW UNIVERSITY OF TECHNOLOGY
FACULTY OF ELECTRICAL ENGINEERING
Institute of Control and Industrial Electronics
00-662 Warszawa , ul.Koszykowa 75 Tel. (+ 48 22) 628 06 65 , Fax (+ 48 22) 625 66 33
Marian P. Kazmierkowski
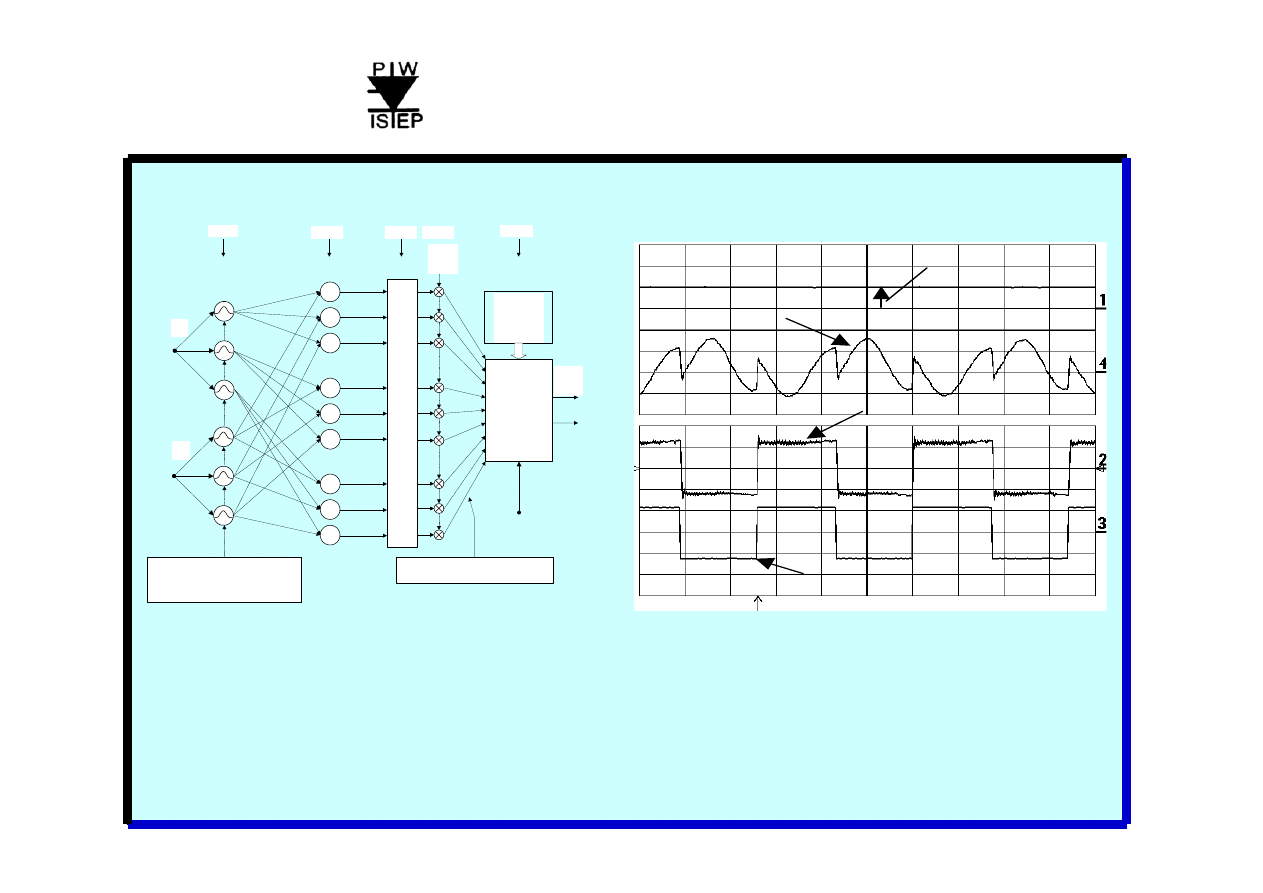
Neuro-Fuzzy DTC-SVM; a) block scheme, b) experimental
oscillograms illustrating torque-tracking performance
V
sc
Vector
Adder
min
min
min
min
min
min
Normalization
γ
s
min
min
min
∆γ
i
Table
membership function
tuning
o
5
weight tuning
ε
Ψ
ε
m
U
dc
ϕ
Vc
w
1
2
w
2
2
w
3
2
w
4
2
w
5
2
w
6
2
w
7
2
w
8
2
w
9
2
1Layer
2 Layer
3 Layer 4 Layer
5 Layer
o
1
o
2
o
4
o
8
o
3
o
5
o
6
o
9
o
7
w
Ψ
w
m
Ψ
s
( 1 W b /d iv )
i
s
α
( 1 0 A /d iv )
m
e
( 1 0 N m /d iv )
m
c
( 1 0 N m /d iv )
5 0 m s /d iv
PELINCEC Seminar, 28 Dec., 2004
WARSAW UNIVERSITY OF TECHNOLOGY
FACULTY OF ELECTRICAL ENGINEERING
Institute of Control and Industrial Electronics
00-662 Warszawa , ul.Koszykowa 75 Tel. (+ 48 22) 628 06 65 , Fax (+ 48 22) 625 66 33
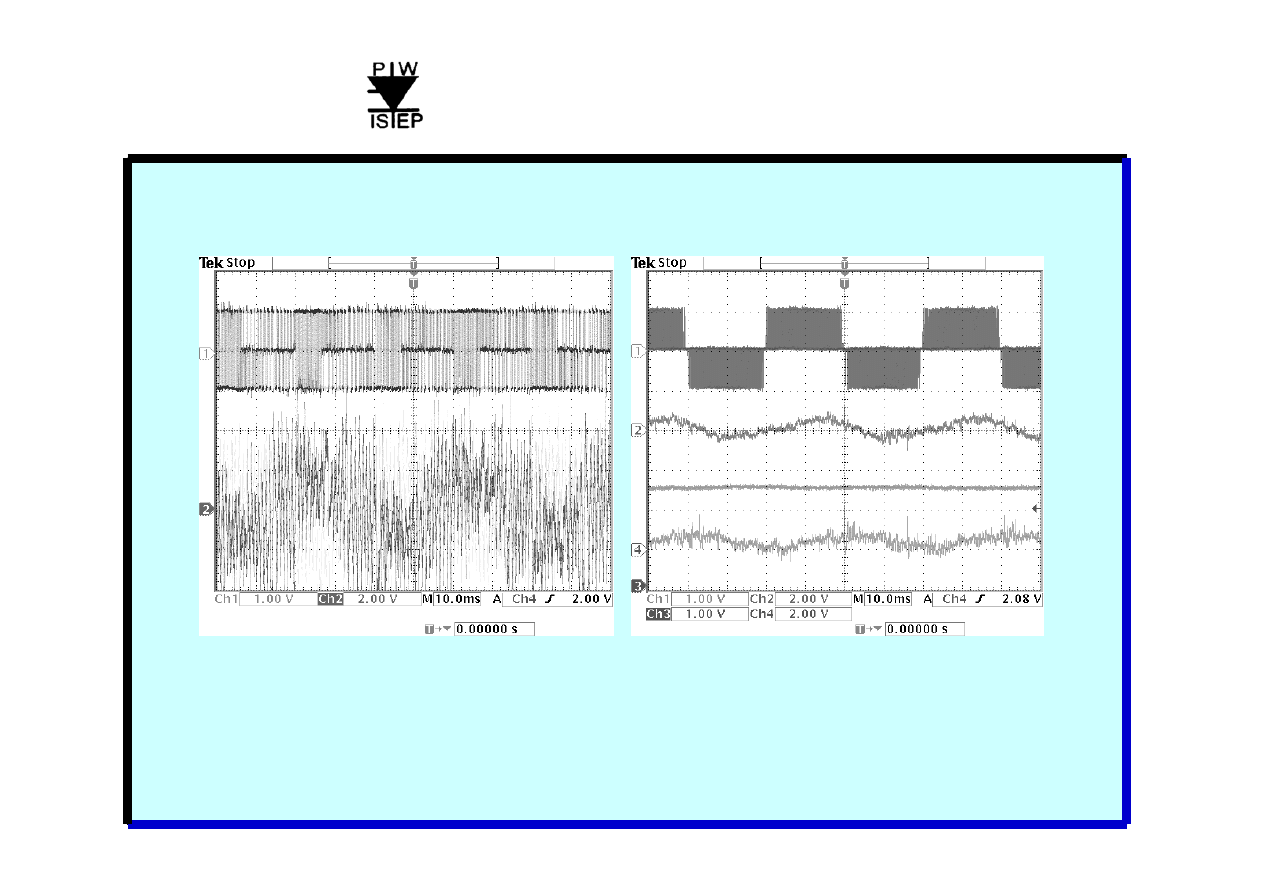
Marian P. Kazmierkowski
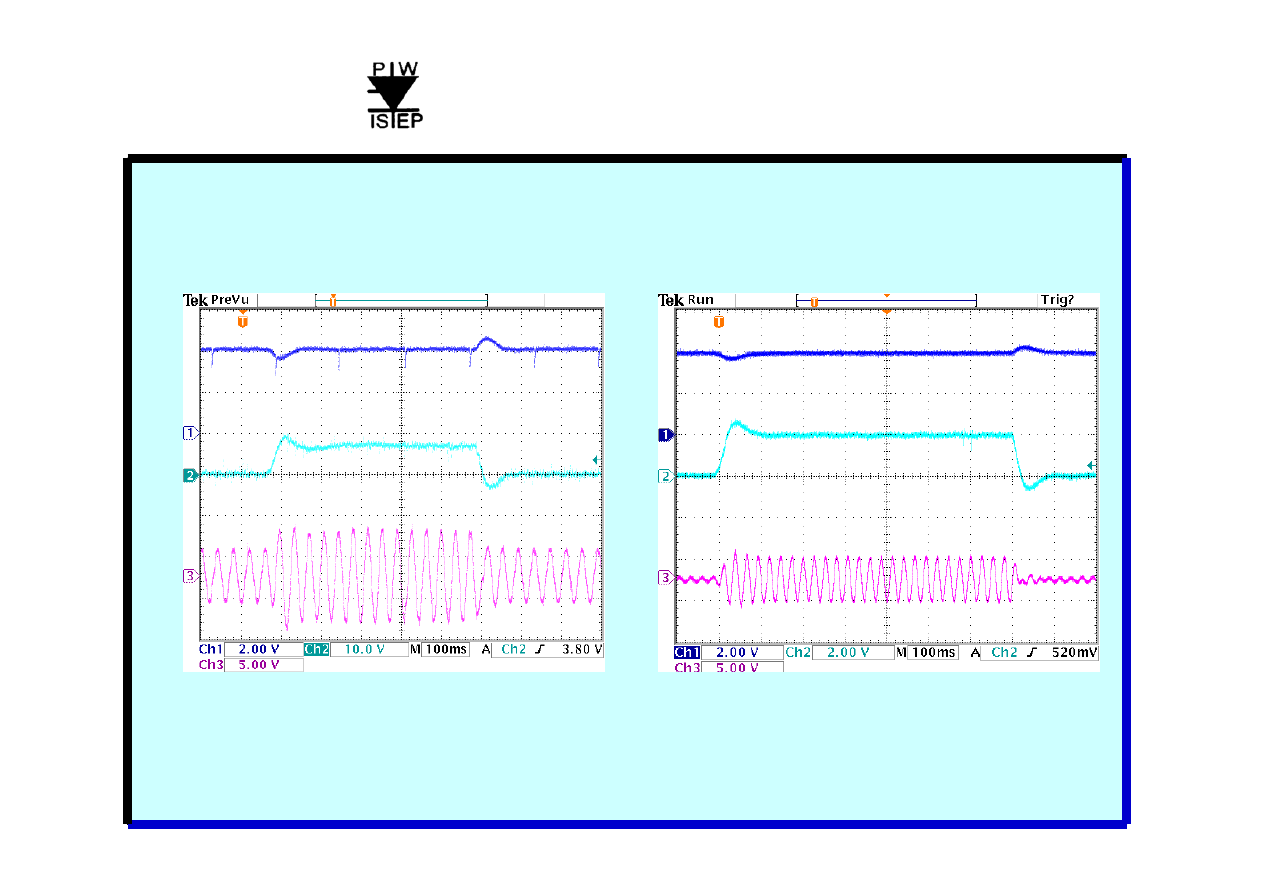
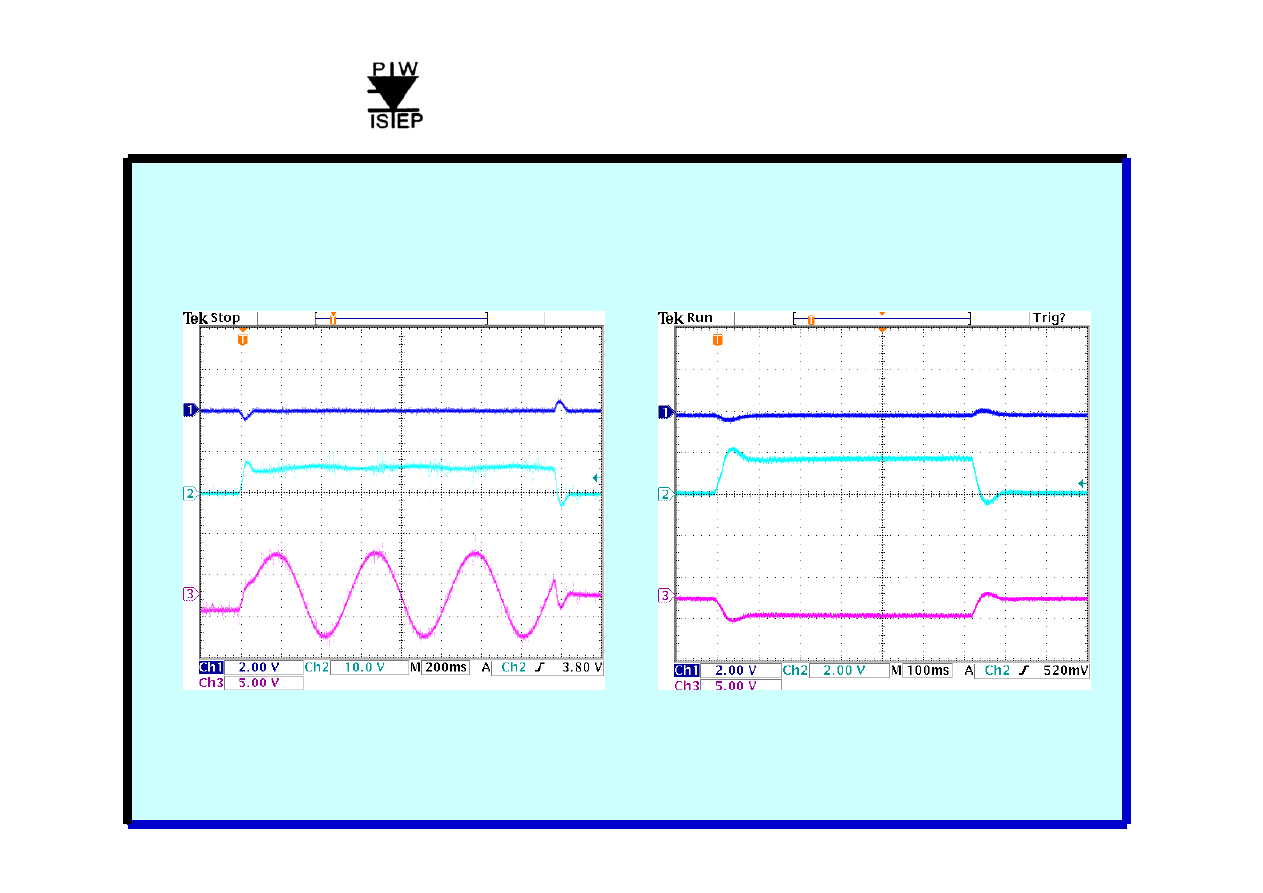
No load experimental steady state oscillograms at stator frequency
25Hz. (a) DTC (b) DTC-SVM.
From the top: line to line voltage, phase current, amplitude of stator flux, motor torque.
DTC and DTC-SVM
PELINCEC Seminar, 28 Dec., 2004
25 us
200 us
WARSAW UNIVERSITY OF TECHNOLOGY
FACULTY OF ELECTRICAL ENGINEERING
Institute of Control and Industrial Electronics
00-662 Warszawa , ul.Koszykowa 75 Tel. (+ 48 22) 628 06 65 , Fax (+ 48 22) 625 66 33

Marian P. Kazmierkowski
PELINCEC Seminar, 28 Dec., 2004
TWERD, Poland
WARSAW UNIVERSITY OF TECHNOLOGY
FACULTY OF ELECTRICAL ENGINEERING
Institute of Control and Industrial Electronics
00-662 Warszawa , ul.Koszykowa 75 Tel. (+ 48 22) 628 06 65 , Fax (+ 48 22) 625 66 33
Marian P. Kazmierkowski
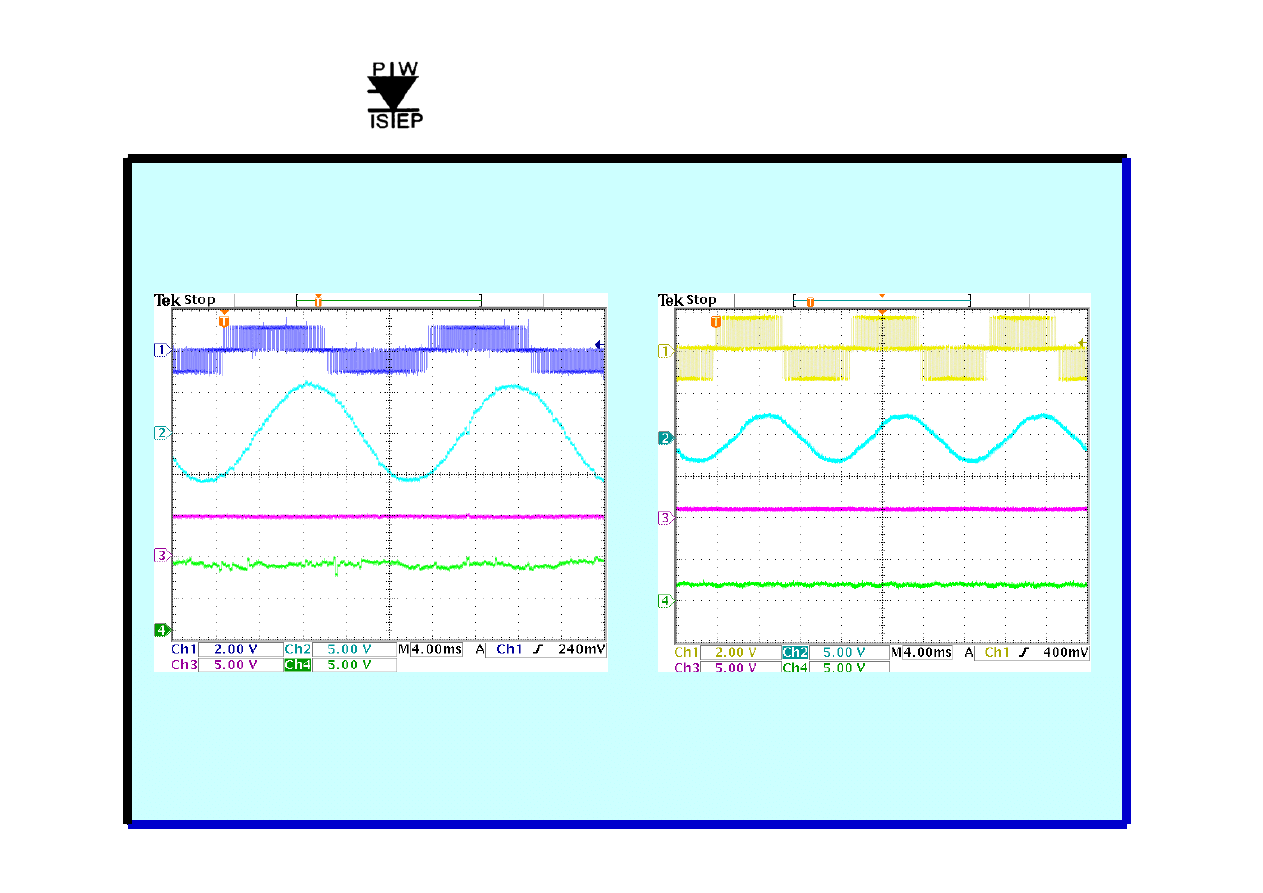
Steady state operation (M
L
=0.5M
N
).
From the top: line to line voltage, line current, stator flux amplitude, electromagnetic torque
Experimental Results
Induction Motor
PMSM Motor
PELINCEC Seminar, 28 Dec., 2004
WARSAW UNIVERSITY OF TECHNOLOGY
FACULTY OF ELECTRICAL ENGINEERING
Institute of Control and Industrial Electronics
00-662 Warszawa , ul.Koszykowa 75 Tel. (+ 48 22) 628 06 65 , Fax (+ 48 22) 625 66 33
Marian P. Kazmierkowski
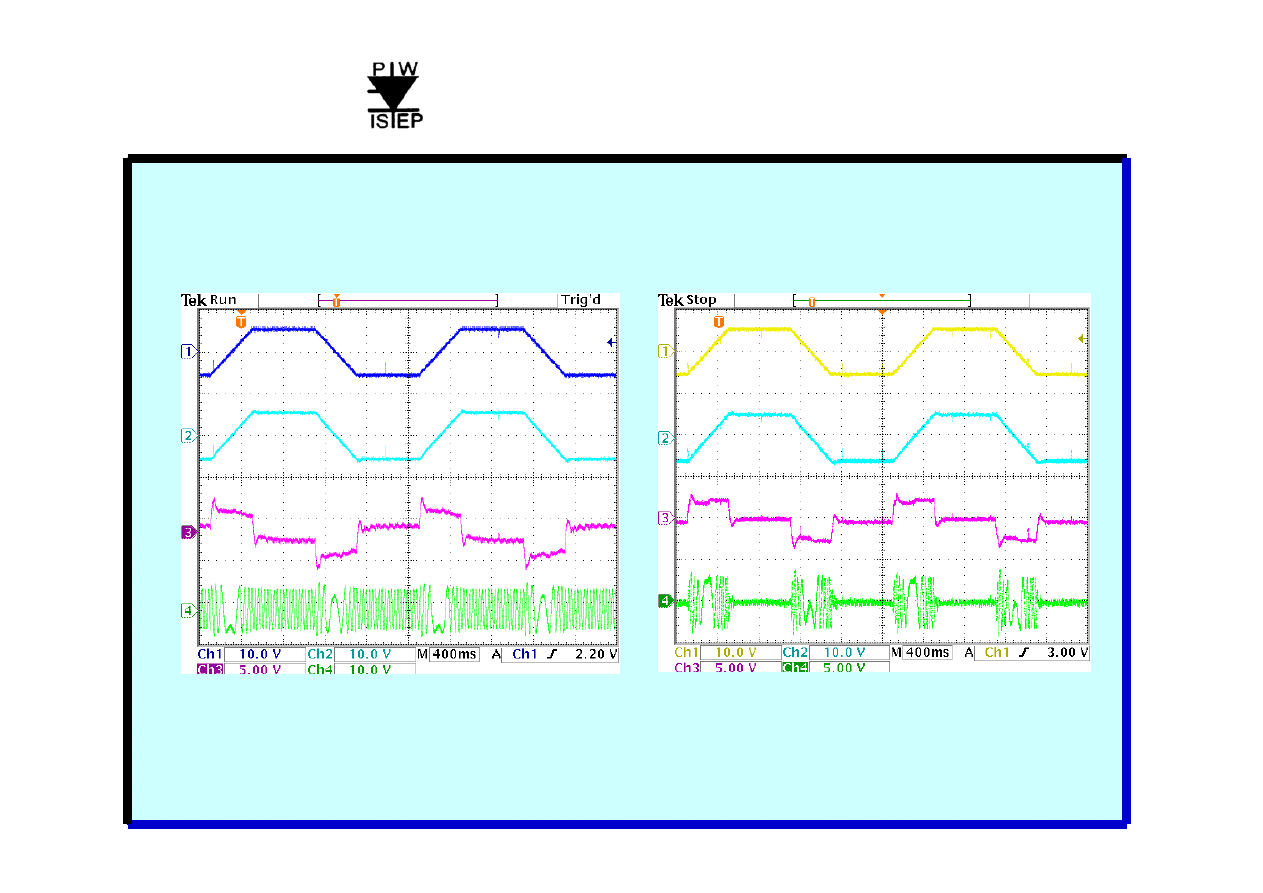
Speed tracking performance (+/-
Ω
mN
).
From the top: reference speed, actual speed, electromagnetic torque, line current.
Induction Motor
PMSM Motor
Experimental Results
PELINCEC Seminar, 28 Dec., 2004
WARSAW UNIVERSITY OF TECHNOLOGY
FACULTY OF ELECTRICAL ENGINEERING
Institute of Control and Industrial Electronics
00-662 Warszawa , ul.Koszykowa 75 Tel. (+ 48 22) 628 06 65 , Fax (+ 48 22) 625 66 33
Marian P. Kazmierkowski
Transients to step change of load (speed = 750 rpm, M
L
=0.5M
N
).
From the top: actual speed, electromagnetic torque, line current.
Induction Motor
PMSM Motor
Experimental Results
PELINCEC Seminar, 28 Dec., 2004
WARSAW UNIVERSITY OF TECHNOLOGY
FACULTY OF ELECTRICAL ENGINEERING
Institute of Control and Industrial Electronics
00-662 Warszawa , ul.Koszykowa 75 Tel. (+ 48 22) 628 06 65 , Fax (+ 48 22) 625 66 33
Marian P. Kazmierkowski
Transients to step change of load (speed = 0 rpm, M
L
=0.5M
N
).
From the top: actual speed, electromagnetic torque, line current.
Induction Motor
PMSM Motor
Experimental Results
PELINCEC Seminar, 28 Dec., 2004
WARSAW UNIVERSITY OF TECHNOLOGY
FACULTY OF ELECTRICAL ENGINEERING
Institute of Control and Industrial Electronics
00-662 Warszawa , ul.Koszykowa 75 Tel. (+ 48 22) 628 06 65 , Fax (+ 48 22) 625 66 33
Marian P. Kazmierkowski
PELINCEC Seminar, 28 Dec., 2004
CONCLUSIONS
•
DTC represents a viable alternative to Field Oriented Control (FOC) being also
a general philosophy for controlling the AC drives in both motor and generator
mode of operation.
•
FOC requires an accurate estimation of the rotor flux vector. However, when
an accurate estimation of the motor flux is available, there is no need to set
up a current control loop and DTC is the natural solution.
•
The main features of DTC can be summarized as follows:
- DTC operates with closed torque and flux loops without current controllers,
- DTC needs stator flux and torque estimation; is not sensitive to rotor
parameters,
- DTC is inherently a motion sensorless control method,
- DTC has simple and robust control structure; however, the performance of
DTC strongly depends on the quality of the estimation of the actual stator
flux and torque.
WARSAW UNIVERSITY OF TECHNOLOGY
FACULTY OF ELECTRICAL ENGINEERING
Institute of Control and Industrial Electronics
00-662 Warszawa , ul.Koszykowa 75 Tel. (+ 48 22) 628 06 65 , Fax (+ 48 22) 625 66 33
Marian P. Kazmierkowski
PELINCEC Seminar, 28 Dec., 2004
CONCLUSIONS (2)
•
Constant switching frequency DTC-SVM schemes improve considerably the
drive performance (reduce torque and flux pulsations, reliable start up and low
speed operation, well-defined harmonic spectrum and radiated noise).
•
Short sampling time required by the ST-DTC schemes makes them suited to
very fast torque and flux controlled drives because of the simplicity of the
control algorithm.
•
DTC strategy will continue to play a strategic role in the development of high-
performance motion sensorless AC drives
WARSAW UNIVERSITY OF TECHNOLOGY
FACULTY OF ELECTRICAL ENGINEERING
Institute of Control and Industrial Electronics
00-662 Warszawa , ul.Koszykowa 75 Tel. (+ 48 22) 628 06 65 , Fax (+ 48 22) 625 66 33
Wyszukiwarka
Podobne podstrony:
skierowanie Kazmierczak, DODATKOWE
Polityka pieniężna wykłady notatki na podstawie Kazmierczak A Polityka pieniezna w gospodarce otwar
49 Kazmierz Wielki
pedagogika czasu wolnego, kazmierczak, K
S. Kaźmierczyk. Wstęp do prawoznawstwa. 1999, Administracja publiczna, WSTĘP DO PRAWOZNAWSTWA
kazmierkowski ieee
kazmierski
Wstęp Do Prawoznawstwa-Kaźmierczyk I Pulka, Nauka, Varia
Kazmierczak
kaźmierczak,rekultywacja i zagospodarowanie terenów pogórniczych, Zagospodarowanie terenów pogórnicz
Kaźmierczak, Arkadiusz Olimpizm wobec różnic i nierówności społecznych idea i rzeczywistość (2013)
kaźmierczak,rekultywacja i zagospodarowanie terenów pogórniczych, Ocena wartości elementów środowisk
Arek Kazmierczacz BadOper
kaźmierczak,rekultywacja i zagospodarowanie terenów pogórniczych, Ocena wartości elementów środowisk
Sekularyzacja prawosławia a rewolucja Kaźmierczyk,Z
kaźmierczak,rekultywacja i zagospodarowanie terenów pogórniczych, Zagospodarowanie terenów pogórnicz
więcej podobnych podstron