Akademia Górniczo-Hutnicza
Wydział Elektrotechniki, Automatyki, Informatyki i Elektroniki
Laboratorium „Napęd elektryczny”
Temat:
Charakterystyki silnika klatkowego zasilanego napięciem
o regulowanej częstotliwości
Prowadzący: Data:
dr inż. Andrzej Stobiecki
Pytania kontrolne
1. Budowa i zasada działania silnika asynchronicznego klatkowego
2. Schemat zastępczy jednej fazy silnika asynchronicznego klatkowego (z rozdzielonymi
obwodami stojana i wirnika oraz z obwodem wirnika sprowadzonym na stronę stojana).
Interpretacja elementów schematu zastępczego.
3. Rozruch silnika klatkowego
4. Regulacja prędkości obrotowej silnika asynchronicznego klatkowego
5. Hamowanie silnika asynchronicznego klatkowego
6. Podstawowe zależności dla silników asynchronicznych: prędkość synchroniczna
ω
0
,
poślizg s, poślizg krytyczny s
k
, moment krytyczny M
k
, wzór Klossa, częstotliwość napięcia
w wirniku f
2
(można zapamiętać wzory uproszczone dla R
s
=0, ale trzeba zdawać sobie sprawę
z charakteru wpływu R
s
na poszczególne wielkości). Wzory na poślizg krytyczny i na
moment krytyczny powinny uwzględniać zależność tych wielkości od parametrów maszyny
(rezystancje, reaktancje, prędkość synchroniczna) i ewentualnie napięcia zasilania.
7. Charakterystyka
ω=f(M) silnika asynchronicznego
8. Charakterystyki silnika klatkowego przy zasilaniu napięciem o regulowanej częstotliwości
(I i II strefa regulacji)
9. Charakterystyka napięcie - częstotliwość i jej wpływ na charakterystyki
ω=f(M) silnika
asynchronicznego przy zasilaniu napięciem o regulowanej częstotliwości
Literatura:
Bisztyga K.: Sterowanie i regulacja silników elektrycznych.
Plamitzer A.: Maszyny elektryczne (te książki tylko w części się zastępują)
Notatki wykładowe z przedmiotu „Maszyny elektryczne”
Materiały z ćwiczeń laboratoryjnych i sprawozdanie
Uwaga: II strefa regulacji – praca silnika przy częstotliwości napięcia zasilającego większej niż
częstotliwość znamionowa maszyny
Charakterystyki silnika asynchronicznego…
w. 2006
2
1.
Napęd z klatkowym silnikiem indukcyjnym zasilany napięciem o regulowanej częstotliwości
Silniki asynchroniczne klatkowe są najczęściej wykorzystywanymi maszynami
w przemyśle ze względu na niski koszt i odporną konstrukcję. Oprócz tych zalet mają też one
istotną wadę, jaką są trudności w regulacji prędkości obrotowej. Jak wynika z zależności
p
f
o
1
2
π
ω
=
(1)
gdzie: ω
o
– prędkość kątowa wirowania pola (prędkość synchroniczna) [rad/s]
f
1
– częstotliwość napięcia zasilającego silnik
p – ilość par biegunów maszyny,
szybkość wirowania pola elektromagnetycznego w maszynie zmienia się proporcjonalnie do
zmiany częstotliwości napięcia zasilającego. Ponieważ wirnik silnika kręci się nieco wolniej niż
wiruje pole, regulując częstotliwość napięcia zasilającego silnik można wpływać na wartość jego
prędkości obrotowej. Źródłem napięcia przemiennego o regulowanej częstotliwości może być
urządzenie energoelektroniczne nazywane falownikiem napięcia.
Wartość maksymalna momentu maszyny, zwana momentem krytycznym albo momentem
utyku, jest określona przez (przy pominięciu rezystancji stojana R
1
– rys.1)
2
2
1
2
12
max
2
*
3
X
U
c
T
o
ω
=
(2)
gdzie: U
1
– napięcie zasilania silnika, wartość skuteczna
X
2
– reaktancja obwodu wirnika
c
12
– stała maszyny
Jak wynika z zależności (2), moment utyku jest wprost proporcjonalny do kwadratu napięcia
zasilania U
1
i odwrotnie proporcjonalny do kwadratu częstotliwości napięcia zasilającego f
1
(częstotliwość jest ukryta w ω
o
= 2πf
1
i w X
2
= 2πf
1
L
2
’, L
2
’– indukcyjność w obwodzie wirnika
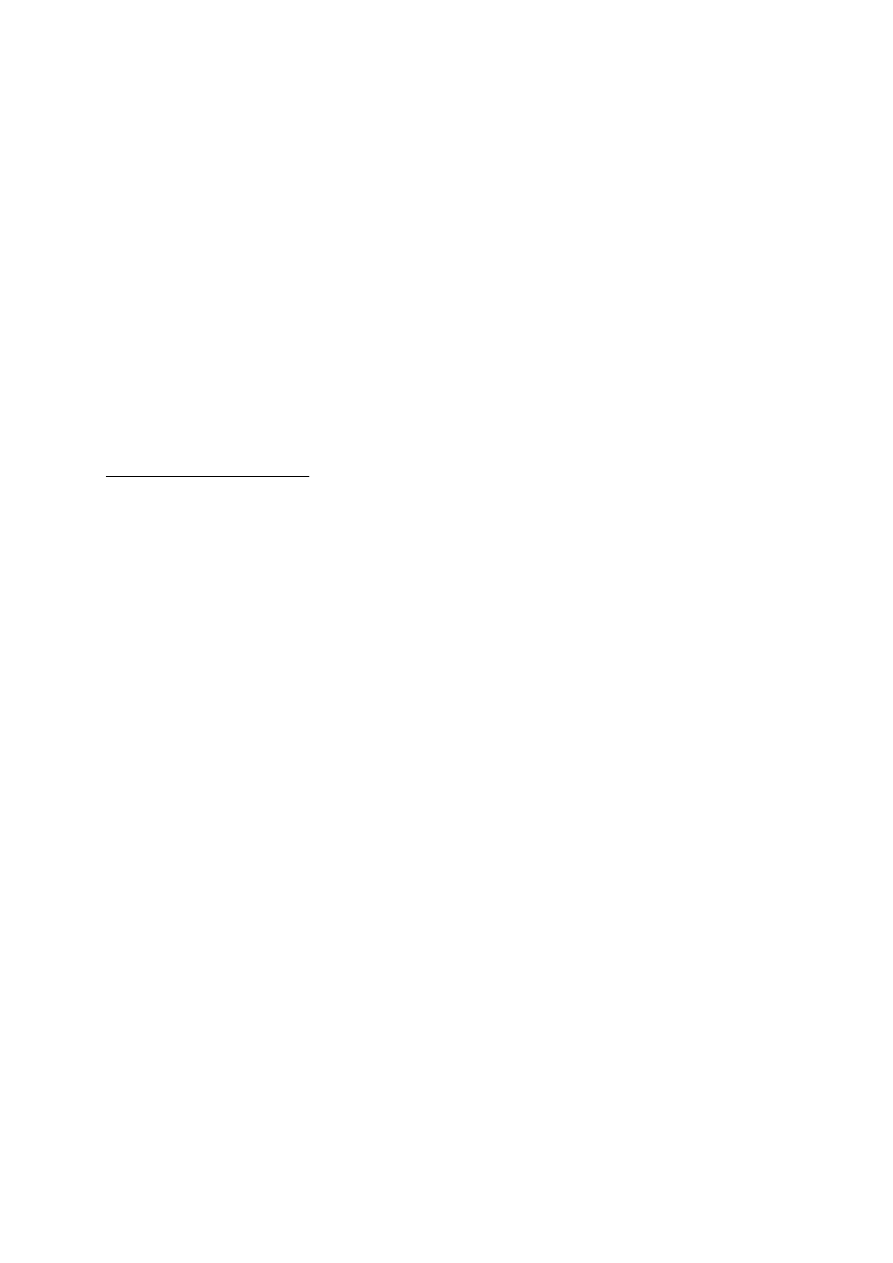
sprowadzona na stronę stojana, rys. 1). Jeśli moment maksymalny silnika indukcyjnego ma być
stały przy częstotliwościowej regulacji prędkości, to napięcie sieci zasilającej musi się zmienić
proporcjonalnie do zmiany częstotliwości sieci. Charakterystyka sterowania wynikająca z tej
zasady narysowana jest linią przerywaną na rysunku 2.
Rys. 1. Schemat zastępczy
jednofazowy silnika indukcyjnego
Rys. 2. Charakterystyki U/f przy
częstotliwościowym sterowaniu
silnika indukcyjnego
Rezystancję R
1
stojana silnika asynchronicznego można pominąć tylko dla dużych
częstotliwości napięcia zasilającego. Dla małych częstotliwości napięcia zasilającego spadek
napięcia na R
1
musi być kompensowany przez dodatkowe napięcie zasilania, aby zachować stały
moment maksymalny. Odpowiednią charakterystykę sterowania narysowano na rysunku 2 linią
ciągłą. Na przebieg tej charakterystyki mają wpływ parametry schematu zastępczego silnika
indukcyjnego.
Charakterystyki silnika asynchronicznego…
w. 2006
3
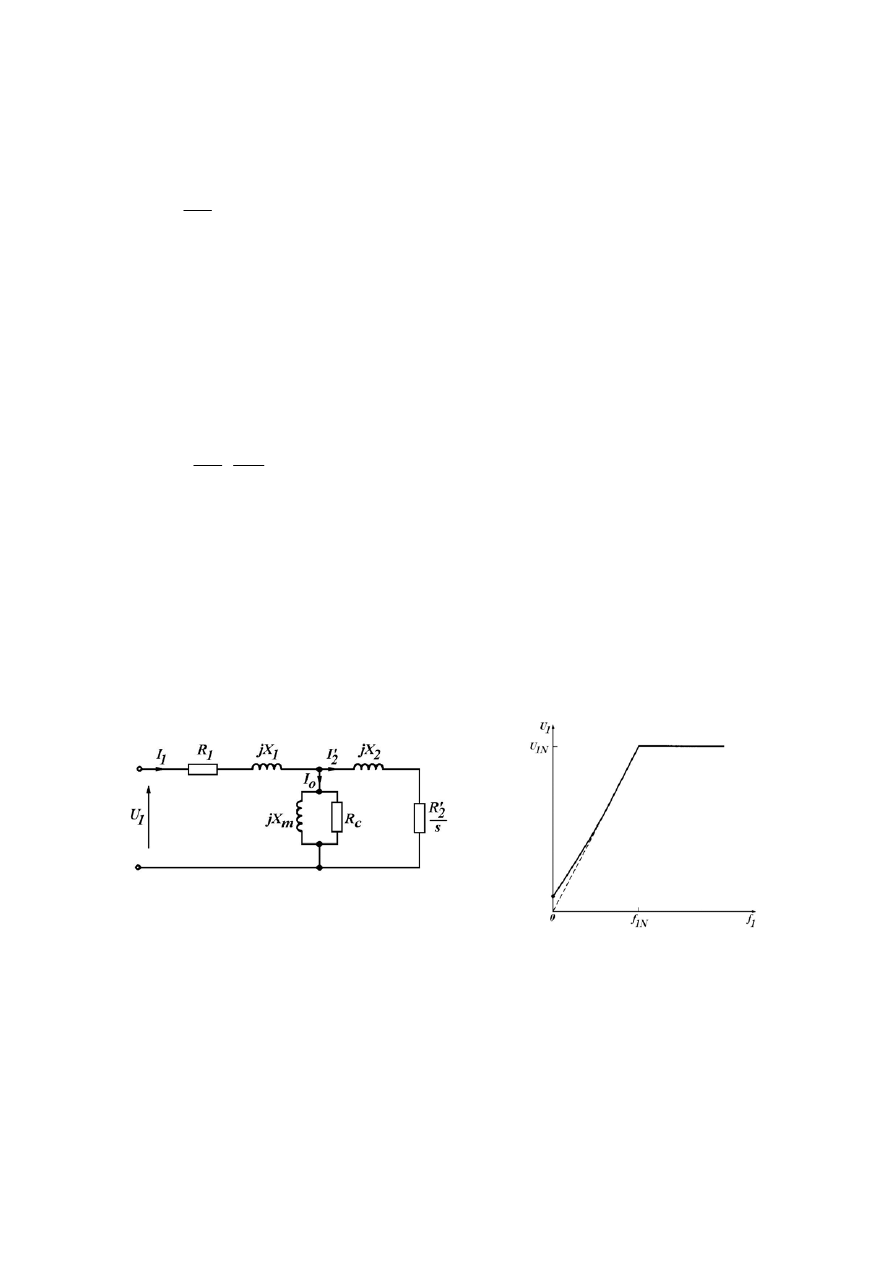
Napięcie zasilania można zwiększać proporcjonalnie do częstotliwości do chwili
osiągnięcia częstotliwości znamionowej – wtedy napięcie też powinno mieć wartość
znamionową. Ponieważ napięcie zasilania maszyny nie powinno przekraczać wartości
znamionowej o więcej niż 10%, przy zasilaniu silnika częstotliwością większą od znamionowej
trzeba utrzymywać stałą wartość napięcia zasilającego. W efekcie moment maksymalny
wytwarzany przez silnik maleje dla częstotliwości napięcia zasilającego większych niż
częstotliwość znamionowa.
Charakterystyki mechaniczne silnika, ilustrujące opisane zjawiska, pokazano na rysunku 3.
Rys. 3. Charakterystyki silnika klatkowego zasilanego napięciem o regulowanej częstotliwości;
a) dla proporcjonalnej zmiany U
1
i f
1
, b) dla dobranej charakterystyki U
1
/f
1
2.
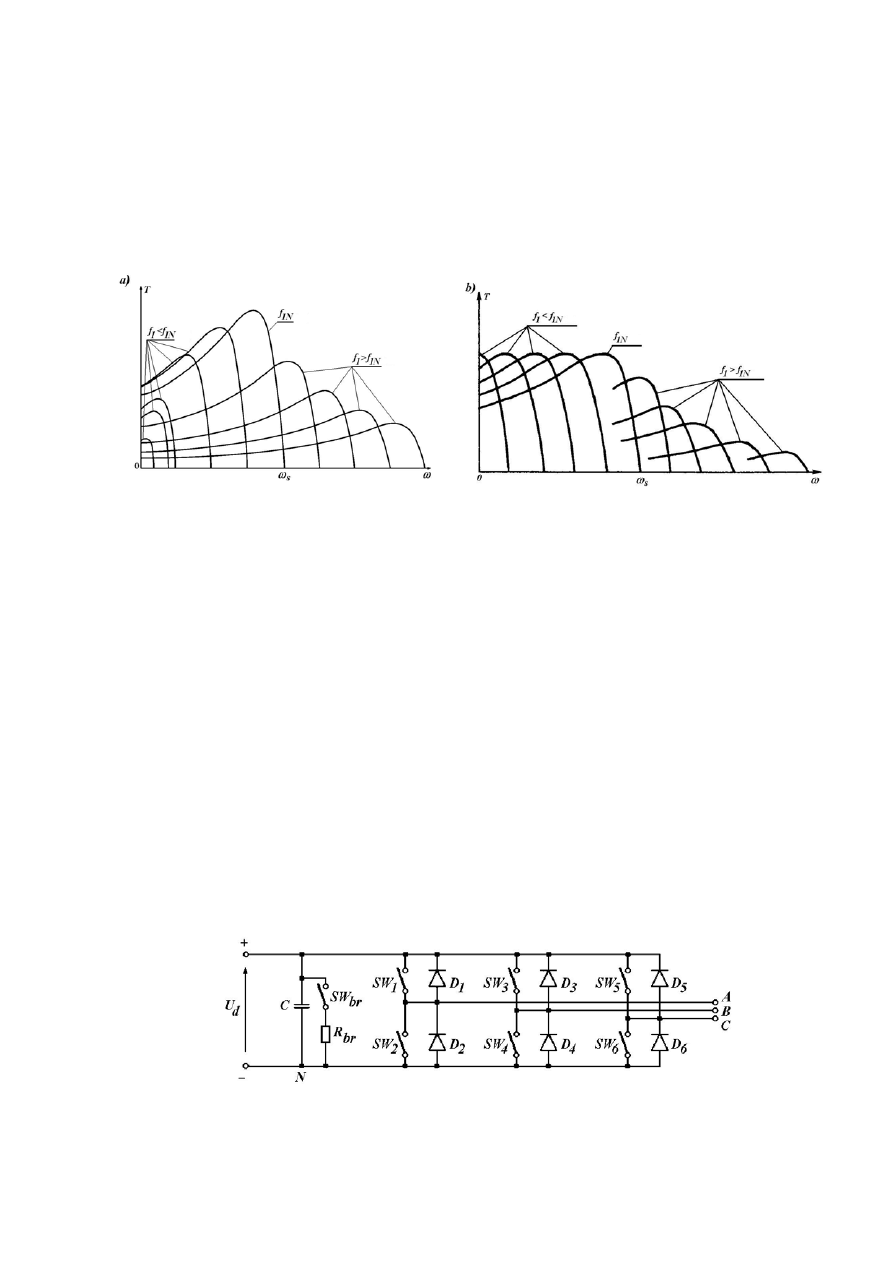
Trójfazowy falownik napięcia
Najczęściej wykorzystywany układ trójfazowego falownika napięcia, składający się
z trzech gałęzi, po jednej dla każdej fazy, pokazano na rysunku 4.
Falownik zasilany jest napięciem stałym. Jako łączniki energoelektroniczne
wykorzystywane są najczęściej tranzystory IGBT albo – przy dużych mocach – tyrystory GTO.
Odpowiednio sterując włączaniem i wyłączaniem łączników uzyskuje się na wyjściu falownika
napięcie trójfazowe. Napięcie wyjściowe falownika może być niemodulowane w najprostszym
przypadku (rys. 5), ale zazwyczaj jest modulowane (rys. 6). Kształt napięcia wyjściowego nie
zależy od parametrów obciążenia.
Falownik napięcia zasilający silnik klatkowy powinien:
- wytwarzać napięcie wyjściowe o regulowanej częstotliwości
- umożliwiać regulację wartości napięcia wyjściowego, rozumianej jako wartość skuteczna
podstawowej harmonicznej tego napięcia
- umożliwiać redukcję zawartości wyższych harmonicznych w napięciu wyjściowym
(przede wszystkim harmonicznych niskich rzędów, które są najbardziej szkodliwe dla
napędu z silnikiem indukcyjnym)
Rys. 4. Trójfazowy falownik napięcia
Charakterystyki silnika asynchronicznego…
w. 2006
4
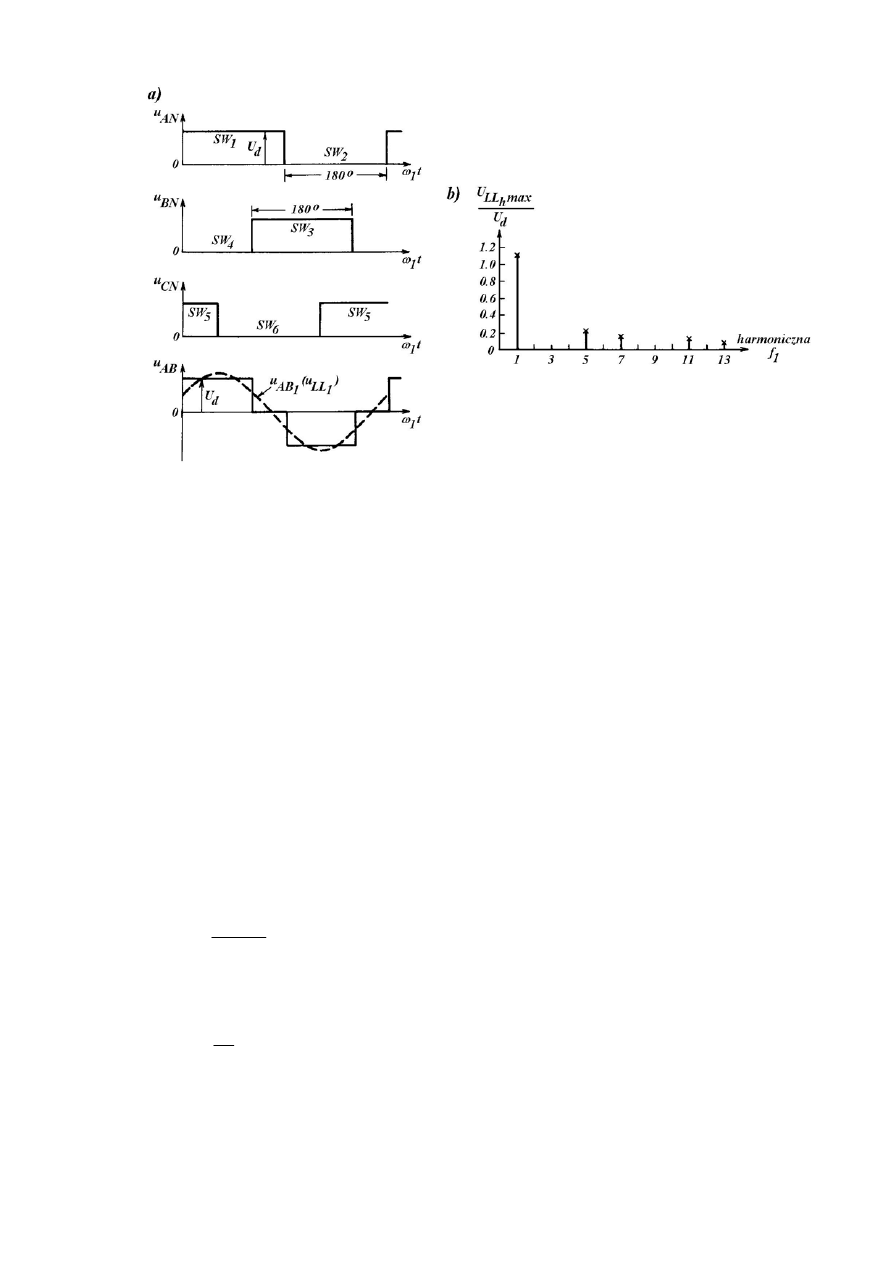
Rys. 5. Trójfazowy falownik square-wave; a) napięcie wyjściowe, b) widmo
harmonicznych
Wszystkie te funkcje można zrealizować modulując napięcie wyjściowe falownika.
Ponieważ modulowane napięcie ma kształt ciągu impulsów o różnej szerokości (rys. 6b),
modulacja jest nazywana modulacją szerokości impulsów (MSI).
Jest kilka sposobów modulowania łączników falownika, aby kształtować napięcia
wyjściowe w taki sposób, żeby było tak zbliżone do sinusoidy, jak to jest tylko możliwe.
W jednym z nich, zwanym sinusoidalną modulacją szerokości impulsów, aby otrzymać
trójfazowe napięcie wyjściowe falownika napięcia jeden przebieg piłokształtny (v
∆
, rys 6a) jest
porównywany z trzema sinusoidalnymi napięciami sterującymi (v
ster,A
, v
ster,B
, v
ster,C
)
przesuniętymi w fazie o 120
o
. W ten sposób generowane są sygnały sterujące dla łączników.
W chwili, gdy wartości przebiegu piłokształtnego i trójkątnego są takie same, przełączają się
łączniki w odpowiedniej fazie falownika – jeden z nich się załącza, a drugi wyłącza.
Częstotliwość napięcia wyjściowego falownika można zmieniać zmieniając częstotliwość
sterującego napięcia sinusoidalnego. Wartość amplitudy podstawowej harmonicznej napięcia
wyjściowego zmienia się zmieniając amplitudę przebiegu sinusoidalnego w stosunku do
amplitudy przebiegu piłokształtnego (nazywanego także przebiegiem nośnym), dla stałej
wartości zasilającego falownik napięcia U
d
.
Dwa parametry są charakterystyczne dla sinusoidalnej modulacji szerokości impulsów:
- głębokość modulacji m
a
definiowana jako
max
,
max
,
∆
=
U
U
m
ster
a
(3)
gdzie: U
ster,max
– amplituda sterującego napięcia sinusoidalnego
U
∆,max
– amplituda piłokształtnego przebiegu nośnego
- pulsacja względna przebiegu modulującego m
f
definiowana jako
1
f
f
m
f
∆
=
(4)
gdzie: f
∆
– częstotliwość przebiegu nośnego
f
1
– częstotliwość sterującego napięcia sinusoidalnego, a także częstotliwość
wyjściowego napięcia falownika
Charakterystyki silnika asynchronicznego…
w. 2006
5
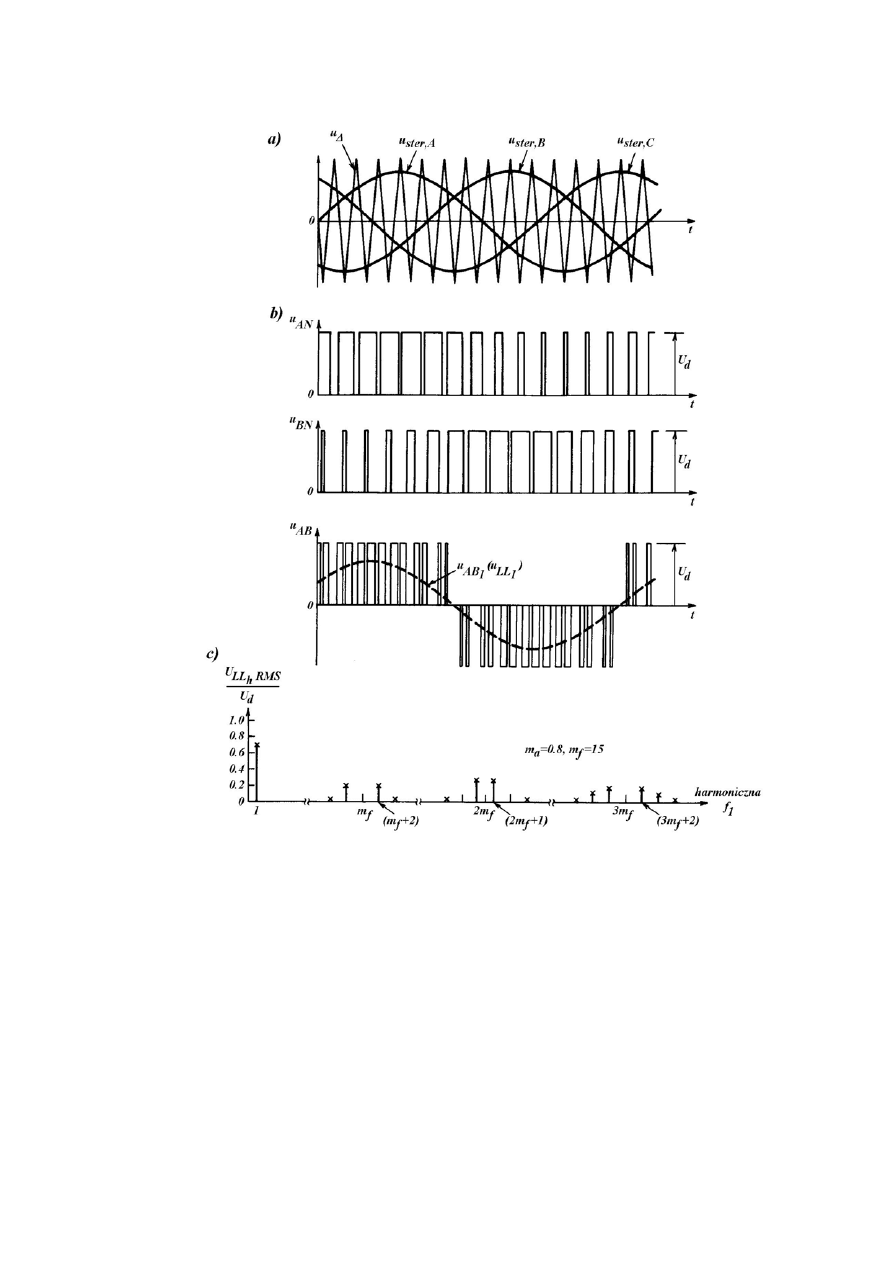
Rys. 6. Trójfazowy falownik MSI; a) przebiegi, b) widmo harmonicznych
Głębokość modulacji m
a
opisuje amplitudę wyjściowego napięcia falownika dla danej
wartości zasilającego falownik napięcia U
d
. Dla większych wartości pulsacji względnej m
f
harmoniczne napięcia wyjściowego „przesuwają się” w kierunku wyższych częstotliwości, tak
że zawartość harmonicznych niskiego rzędu w napięciu wyjściowym falownika jest mniejsza.
Metody uzyskiwania modulowanego napięcia wyjściowego falownika opisywane są na
przykład w książce: Nowacki Z.: Modulacja szerokości impulsów w napędach
przekształtnikowych prądu przemiennego. Warszawa. PWN 1991
Podczas hamowania napędu z silnikiem indukcyjnym zasilanego z falownika napięcia
zmniejszana jest częstotliwość napięcia zasilającego. Wirnik silnika obraca się z prędkością
większą, niż prędkość wirowania pola magnetycznego i następuje hamowanie odzyskowe.
Energia kinetyczna hamującej maszyny jest przekazywana poprzez diody D
1
-D
6
(rys. 4) do
kondensatora C obwodu pośredniczącego napięcia stałego. Jeśli energia ta nie może być
zwrócona do sieci napięcia stałego (na przykład dlatego, że źródłem napięcia stałego jest
Charakterystyki silnika asynchronicznego…
w. 2006
6
prostownik diodowy), to kondensator podczas hamowania musi być rozładowywany. Służy do
tego obwód zawierający dodatkowy łącznik SW
h
i rezystor R
h
(rys.4). Energia hamowania jest
rozpraszana w postaci ciepła.
3. Stanowisko
laboratoryjne
3.1. Dane znamionowe maszyn
W tabeli 1 zanotuj odczytane z tabliczki znamionowej dane znamionowe silnika i prądnicy
obciążającej.
Tabela 1
silnik
prądnica obciążająca
typ silnika
---
moc znamionowa P
N
kW
napięcie znamionowe U
N
V
częstotliwość znamionowa f
N
Hz
---
prąd znamionowy I
N
A
obroty znamionowe n
N
obr/min
prąd wzbudzenia i
fN
A ---
współczynnik mocy cosφ
N
---
---
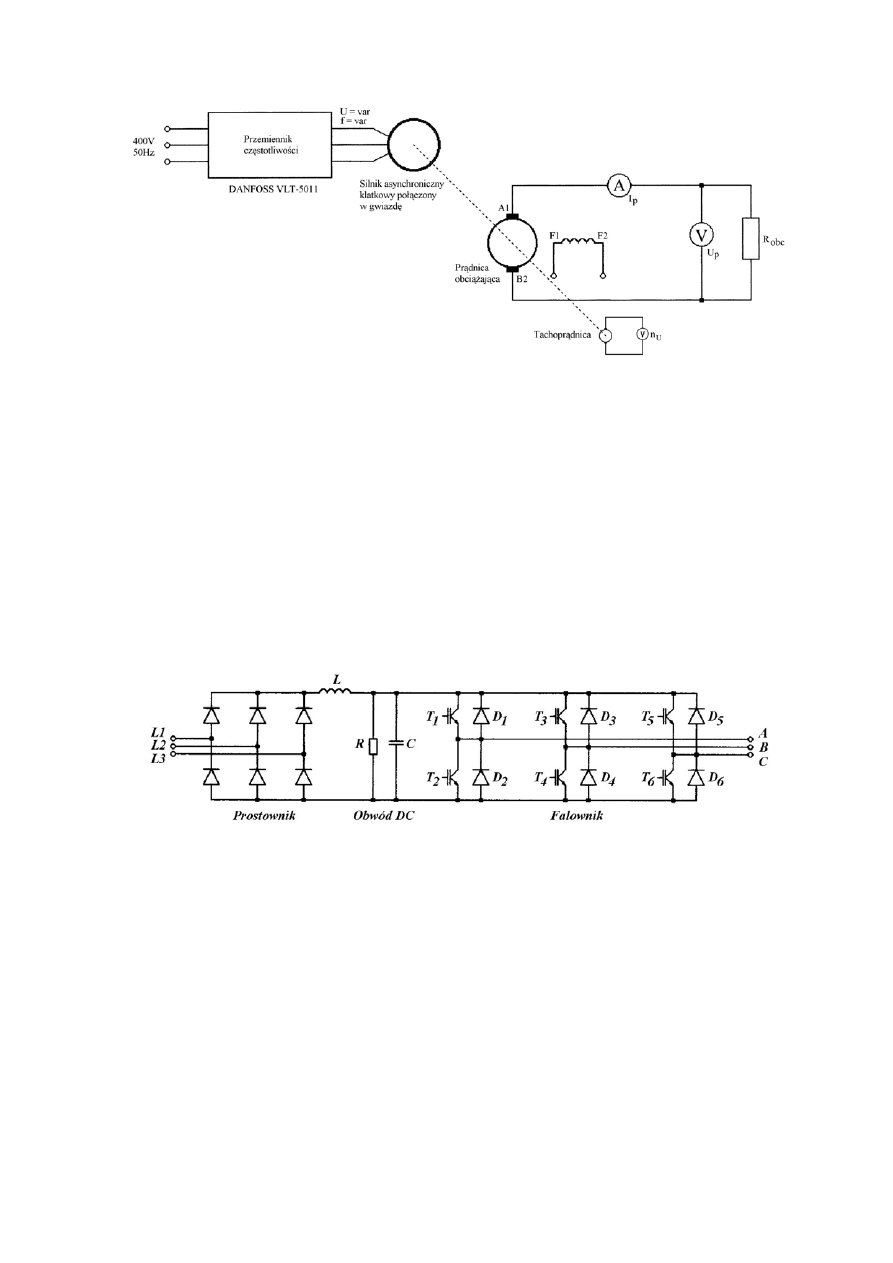
3.2. Schemat układu pomiarowego
Schemat układu pomiarowego pokazano na rysunku 7. Do pomiaru prędkości
wykorzystana zostanie tachoprądnica, umieszczona na wspólnym wale z silnikiem. Siła
elektromotoryczna tej prądnicy mierzona będzie woltomierzem. SEM prądnicy wyraża się
zależnością
φω
k
E
G
=
(5)
gdzie: k – stała prądnicy
φ - strumień wzbudzenia
ω – prędkość obrotowa,
więc przy stałym strumieniu jest proporcjonalna do prędkości obrotowej. Przed wykonaniem
pomiarów należy określić współczynnik
φ
k
(stałą tachometru) mierząc dla jednego punktu
prędkość obrotową (np. ręcznym miernikiem) i odczytując SEM generatora. Zanotuj wyniki
pomiarów w przygotowanej tabeli i oblicz stałą.
=
=
=
ω
φ
π
ω
G
E
k
n
,
30
SEM [V]
n [obr/min]
ω [rad/s]
3.3. Przetwornica częstotliwości Danfoss VLT 5011
Uproszczony schemat przetwornicy częstotliwości DANFOSS VLT 5011 pokazano na
rysunku 8. Prostownik diodowy przetwarza napięcie przemienne sieci energetycznej na napięcie
stałe. Kondensator C obwodu pośredniczącego służy jako źródło napięcia stałego o niskiej
rezystancji wewnętrznej dla falownika. Przy zasilaniu napięciem przemiennym 400V, napięcie
stałe na kondensatorze wynosi około 550V. Falownik zbudowany z tranzystorów IGBT
przetwarza napięcie stałe na trójfazowe napięcie przemienne.
Charakterystyki silnika asynchronicznego…
w. 2006
7
Rys. 7. Schemat układu pomiarowego
Podstawowe dane znamionowe przetwornicy częstotliwości VLT 5011 są następujące:
- napięcie zasilania – 3 x 380÷500V
- częstotliwość zasilania – 50/60Hz
- współczynnik mocy cosφ – 1.0 przy obciążeniu znamionowym
- napięcie wyjściowe - 0÷100% napięcia zasilania
- znamionowy prąd wyjściowy – 16A
- maksymalny prąd wyjściowy – 25.6A/60sec
- częstotliwość napięcia wyjściowego - 0÷132Hz
- typowe obciążenie na wale – 7.5kW (10KM)
Przetwornica VLT 5011 nie jest wyposażona w układ hamowania.
Sposób obsługi przetwornicy częstotliwości zostanie omówiony przez prowadzącego zajęcia
laboratoryjne.
Rys. 8. Uproszczony schemat przetwornicy częstotliwości Danfoss VLT 5011
4. Charakterystyki mechaniczne klatkowego silnika indukcyjnego zasilanego napięciem
o regulowanej częstotliwości
4.1. Charakterystyki U
1
/f
1
Przypadek 1 – charakterystyka dobierana jest przez przetwornicę częstotliwości
DANFOSS VLT 5011 na podstawie parametrów schematu zastępczego dla typowego silnika
o określonych danych znamionowych. Parametry schematu zastępczego typowego silnika są
zapisywane w pamięci układu sterowania przetwornicy przez producenta. Dane znamionowe
zasilanego silnika powinny zostać wprowadzone do pamięci VLT 5011 przez użytkownika przed
pierwszym rozruchem silnika. Przyjęte przez przetwornicę wartości rezystancji stojana R
s
i reaktancji stojana X
s
mogą być odczytane jako parametry układu sterowania przetwornicy.
Parametry gałęzi podłużnej schematu zastępczego przyjęte przez przetwornicę dla zasilanego
silnika są następujące:
Charakterystyki silnika asynchronicznego…
w. 2006
8
R
s
Rezystancja gałęzi podłużnej [Ω]
X
s
Reaktancja gałęzi podłużnej [Ω]
Charakterystyka sterowania U
1
/f
1
ma kształt linii prostej łączącej punkty napięcie/częstotliwość
dla częstotliwości f
1
’=10Hz i f
1
”=częstotliwość znamionowa zasilanego silnika (50Hz). Dla
częstotliwości napięcia zasilającego mniejszych od 10Hz i większych od 50Hz nachylenie
charakterystyki U
1
/f
1
może się zmienić. Zanotuj napięcia charakterystyczne dla krzywej U
1
/f
1
w przygotowanej tabeli.
U
1
[V]
f
1
[Hz] 0 10 20 30 40 50 60
Przypadek 2 - charakterystyka dobierana jest przez przetwornicę częstotliwości DANFOSS VLT
5011 na podstawie parametrów schematu zastępczego wyznaczonych przez przetwornicę
w procesie tak zwanej autoadaptacji. Autoadaptacja (AMA) jest algorytmem, który mierzy
parametry silnika elektrycznego podczas postoju. Parametrami mierzonymi podczas AMA są
rezystancja stojana R
s
i reaktancja stojana przy znamionowym poziomie magnesowania X
s
.
Przed wykonaniem autoadaptacji do pamięci przetwornicy muszą zostać wprowadzone dane
znamionowe zasilanego silnika. Zaleca się, aby wykonywać autoadaptację dla zimnego silnika.
Podczas autoadaptacji silnik musi być połączony w trójkąt.
Parametry gałęzi podłużnej schematu zastępczego zmierzone przez przetwornicę podczas
autoadaptacji dla zasilanego silnika są następujące:
R
s
Rezystancja gałęzi podłużnej [Ω]
X
s
Reaktancja gałęzi podłużnej [Ω]
Charakterystyka sterowania U
1
/f
1
ma kształt linii prostej łączącej punkty napięcie/częstotliwość
dla częstotliwości f
1
’=10Hz i f
1
”=częstotliwość znamionowa zasilanego silnika (50Hz). Dla
częstotliwości napięcia zasilającego mniejszych od 10Hz i większych od 50Hz nachylenie
charakterystyki U
1
/f
1
może się zmienić. Zanotuj napięcia charakterystyczne dla krzywej U
1
/f
1
w przygotowanej tabeli.
U
1
[V]
f
1
[Hz] 0 10 20 30 40 50 60
Jak łatwo wykazać, „widziana” przez źródło zasilania impedancja fazy odbiornika połączonego
w gwiazdę jest większa, niż zastępcza impedancja fazy tego samego odbiornika połączonego
w trójkąt (studenci powinni spróbować udowodnić tę zależność samodzielnie!). Ponieważ proces
autoadaptacji jest prowadzony dla silnika połączonego w trójkąt, a podczas badania
charakterystyk mechanicznych maszyna jest połączona w gwiazdę, sposób sterowania dobrany
przez przetwornicę VLT nie zapewnia całkowitej kompensacji spadku napięcia na rezystancji
stojana R
1
(rys. 1).
Przypadek 3 – charakterystyka U
1
/f
1
jest narzucana przez użytkownika. Parametry schematu
zastępczego nie są wtedy brane pod uwagę. Charakterystykę U
1
/f
1
można kształtować
wykorzystując 6 punktów, dla których jest możliwe zdefiniowanie napięcia i częstotliwości.
Siódmym punktem jest punkt dla znamionowego napięcia i znamionowej częstotliwości silnika.
Charakterystyka U
1
/f
1
ma postać linii łamanej, a charakterystyczne napięcia i częstotliwości
Charakterystyki silnika asynchronicznego…
w. 2006
9
mogą być ustawione i odczytane jako parametry układu sterowania przetwornicy. Zanotuj
parametry punktów charakterystycznych krzywej U
1
/f
1
w przygotowanej tabeli.
U
1
[V]
f
1
[Hz]
Charakterystyki sterowania dla wszystkich trzech przypadków narysuj w sprawozdaniu, we
wspólnym układzie współrzędnych.
4.2. Pomiar charakterystyk moment/prędkość
Mierzone będą charakterystyki T=f(ω) dla częstotliwości napięcia zasilającego 10Hz,
20Hz, 30Hz, 40Hz, 50Hz i 60Hz, dla każdej z charakterystyk U
1
/f
1
.
Ponieważ stanowisko pomiarowe nie jest wyposażone w urządzenie do bezpośredniego
pomiaru momentu obciążenia silnika, moment będzie mierzony metodą pośrednią według
wzoru:
T = P
odd
/ ω
(6)
P
odd
= I
G
U
G
+ I
G
2
R
AG
+ ∆P
Fe
+ ∆P
mech
(7)
gdzie:
I
G
U
G
– moc rozpraszana na rezystorze R
obc
I
G
2
R
AG
– straty mocy w uzwojeniu twornika prądnicy („straty w miedzi”); R
AG
– rezystancja
uzwojenia twornika prądnicy równa 0.5Ω
∆P
Fe
– straty mocy w obwodzie magnetycznym prądnicy („straty w żelazie”)
∆P
mech
– straty mechaniczne w układzie.
ω – prędkość obrotowa wirnika silnika [rad/s]
Można założyć, że:
∆P
Fe
+ ∆P
mech
= 0.3 I
G
2
R
AG
(8)
więc
P
odd
= I
G
U
G
+ I
G
2
R
AG
+ ∆P
Fe
+ ∆P
mech
= I
G
U
G
+ 1.3I
G
2
R
AG
.
(9)
Dla prędkości obrotowej zachodzi
ω = π*n/30
(10)
Zanotuj w tabeli 2 wyniki pomiarów prędkości obrotowej n
U
, napięcia wyjściowego
generatora obciążajacego U
G
i prądu twornika generatora I
G
. Oblicz moment silnika
indukcyjnego dla każdego punktu pomiarowego. Obliczenia powinny być wykonywane
w układzie SI.
Wszystkie zmierzone charakterystyki mechaniczne silnika klatkowego T=f(ω) powinny
zostać narysowane w sprawozdaniu, we wspólnym układzie współrzędnych. Przy
charakterystykach trzeba zaznaczyć warunki, w jakich były one mierzone (częstotliwość f
1
i charakterystyka U
1
/f
1
).
Charakterystyki silnika asynchronicznego…
w. 2006
10
Tabela 2
n
U
[V]
U
G
[V]
I
G
[A]
n
[obr/min]
ω
[rad/s]
1.3I
G
2
R
AG
[W]
P
odd
[W]
T
[Nm]
charakterystyka U
1
/f
1
: przypadek 1; f
1
= 60Hz
1.
2.
3.
4.
5.
6.
7.
8.
9.
10.
11.
12.
13.
charakterystyka U
1
/f
1
: przypadek 1; f
1
= 50Hz
1.
2.
3.
4.
5.
6.
7.
8.
9.
10.
11.
12.
13.
charakterystyka U
1
/f
1
: przypadek 1; f
1
= 40Hz
1.
2.
3.
4.
Charakterystyki silnika asynchronicznego…
w. 2006
11
n
U
[V]
U
G
[V]
I
G
[A]
n
[obr/min]
ω
[rad/s]
1.3I
G
2
R
AG
[W]
P
odd
[W]
T
[Nm]
5.
6.
7.
8.
9.
10.
11.
12.
13.
charakterystyka U
1
/f
1
: przypadek 1; f
1
= 30Hz
1.
2.
3.
4.
5.
6.
7.
8.
9.
10.
11.
12.
13.
charakterystyka U
1
/f
1
: przypadek 1; f
1
= 20Hz
1.
2.
3.
4.
5.
6.
7.
8.
9.
Charakterystyki silnika asynchronicznego…
w. 2006
12
n
U
[V]
U
G
[V]
I
G
[A]
n
[obr/min]
ω
[rad/s]
1.3I
G
2
R
AG
[W]
P
odd
[W]
T
[Nm]
10.
11.
12.
13.
charakterystyka U
1
/f
1
: przypadek 1; f
1
= 10Hz
1.
2.
3.
4.
5.
6.
7.
8.
9.
10.
11.
12.
13.
charakterystyka U
1
/f
1
: przypadek 2; f
1
= 60Hz
1.
2.
3.
4.
5.
6.
7.
8.
9.
10.
11.
12.
13.
14.
Charakterystyki silnika asynchronicznego…
w. 2006
13
n
U
[V]
U
G
[V]
I
G
[A]
n
[obr/min]
ω
[rad/s]
1.3I
G
2
R
AG
[W]
P
odd
[W]
T
[Nm]
charakterystyka U
1
/f
1
: przypadek 2; f
1
= 50Hz
1.
2.
3.
4.
5.
6.
7.
8.
9.
10.
11.
12.
13.
charakterystyka U
1
/f
1
: przypadek 2; f
1
= 40Hz
1.
2.
3.
4.
5.
6.
7.
8.
9.
10.
11.
12.
13.
charakterystyka U
1
/f
1
: przypadek 2; f
1
= 30Hz
1.
2.
3.
4.
Charakterystyki silnika asynchronicznego…
w. 2006
14
n
U
[V]
U
G
[V]
I
G
[A]
n
[obr/min]
ω
[rad/s]
1.3I
G
2
R
AG
[W]
P
odd
[W]
T
[Nm]
5.
6.
7.
8.
9.
10.
11.
12.
13.
charakterystyka U
1
/f
1
: przypadek 2; f
1
= 20Hz
1.
2.
3.
4.
5.
6.
7.
8.
9.
10.
11.
12.
13.
14.
charakterystyka U
1
/f
1
: przypadek 2; f
1
= 10Hz
1.
2.
3.
4.
5.
6.
7.
8.
Charakterystyki silnika asynchronicznego…
w. 2006
15
n
U
[V]
U
G
[V]
I
G
[A]
n
[obr/min]
ω
[rad/s]
1.3I
G
2
R
AG
[W]
P
odd
[W]
T
[Nm]
9.
10.
11.
12.
13.
charakterystyka U
1
/f
1
: przypadek 3; f
1
= 60Hz
1.
2.
3.
4.
5.
6.
7.
8.
9.
10.
11.
12.
13.
charakterystyka U
1
/f
1
: przypadek 3; f
1
= 50Hz
1.
2.
3.
4.
5.
6.
7.
8.
9.
10.
11.
12.
13.
Charakterystyki silnika asynchronicznego…
w. 2006
16
n
U
[V]
U
G
[V]
I
G
[A]
n
[obr/min]
ω
[rad/s]
1.3I
G
2
R
AG
[W]
P
odd
[W]
T
[Nm]
charakterystyka U
1
/f
1
: przypadek 3; f
1
= 40Hz
1.
2.
3.
4.
5.
6.
7.
8.
9.
10.
11.
12.
13.
14.
charakterystyka U
1
/f
1
: przypadek 3; f
1
= 30Hz
1.
2.
3.
4.
5.
6.
7.
8.
9.
10.
11.
12.
13.
charakterystyka U
1
/f
1
: przypadek 3; f
1
= 20Hz
1.
2.
3.
Charakterystyki silnika asynchronicznego…
w. 2006
17
n
U
[V]
U
G
[V]
I
G
[A]
n
[obr/min]
ω
[rad/s]
1.3I
G
2
R
AG
[W]
P
odd
[W]
T
[Nm]
4.
5.
6.
7.
8.
9.
10.
11.
12.
13.
charakterystyka U
1
/f
1
: przypadek 3; f
1
= 10Hz
1.
2.
3.
4.
5.
6.
7.
8.
9.
10.
11.
12.
13.
5. Przygotowanie
sprawozdania
Sprawozdanie powinno zawierać następujące elementy:
a. Schemat
układu pomiarowego i dane znamionowe maszyn
b. Opis metod kształtowania charakterystyki U
1
/f
1
realizowanych przez przetwornicę
VLT 5011
c. Wyniki pomiarów charakterystyk U
1
/f
1
, wykres charakterystyk (we wspólnym układzie
współrzędnych), parametry schematu zastępczego silnika dla poszczególnych metod
kształtowania charakterystyki U
1
/f
1
d.
Opis metody pośredniej pomiaru momentu
e. Wyniki pomiarów i obliczeń związanych z badaniem charakterystyk mechanicznych
silnika
Charakterystyki silnika asynchronicznego…
w. 2006
18

f.
Wykres odpowiednio opisanych charakterystyk mechanicznych we wspólnym układzie
współrzędnych
Uwaga: Sprawozdanie należy przygotować w taki sposób, aby dla każdej metody kształtowania
charakterystyki U
1
/f
1
było widoczne powiązanie:
-
opisu metody kształtowania charakterystyki sterowania
-
wyników pomiarów i wykresu charakterystyki U
1
/f
1
-
wyników pomiarów i obliczeń dla charakterystyk mechanicznych oraz tych charakterystyk
Notatki:
Charakterystyki silnika asynchronicznego…
w. 2006
19
Document Outline
Wyszukiwarka
Podobne podstrony:
Instrukcja R1 Falownik
Instrukcja R1 Falownik
Instrukcja do ćw 06 Sterowanie pracą silnika indukcyjnego za pomocą falownika
Falowniki LG seria iC5 instrukcja polska
Napęd prądu przemiennego z falownikiem napięcia
Instrukcja obsługi pistoletu P99 AS wersja 362
DTR.AS.01, Instrukcje, aplisens, dtr
Instrukcja do ćw 06 Sterowanie pracą silnika indukcyjnego za pomocą falownika
falownik wektorowy instrukcja
Falowniki LG seria iC5 instrukcja polska
Autoalarm Cheetah CH AE RANDOM AS Instrukcja obsługi
Autoalarm Cheetah CH AE RANDOM AS instrukcja montażu
Emotion Work as a Source of Stress The Concept and Development of an Instrument
Instrukcja do ćw 06 Sterowanie pracą silnika indukcyjnego za pomocą falownika
FALOWNIK INSTRUKCJA Xtravert 4211105F
Napęd Elektryczny wykład
wykład 6 instrukcje i informacje zwrotne
więcej podobnych podstron