SILNIK INDUKCYJNY STEROWANY
Z WEKTOROWEGO FALOWNIKA NAPIĘCIA
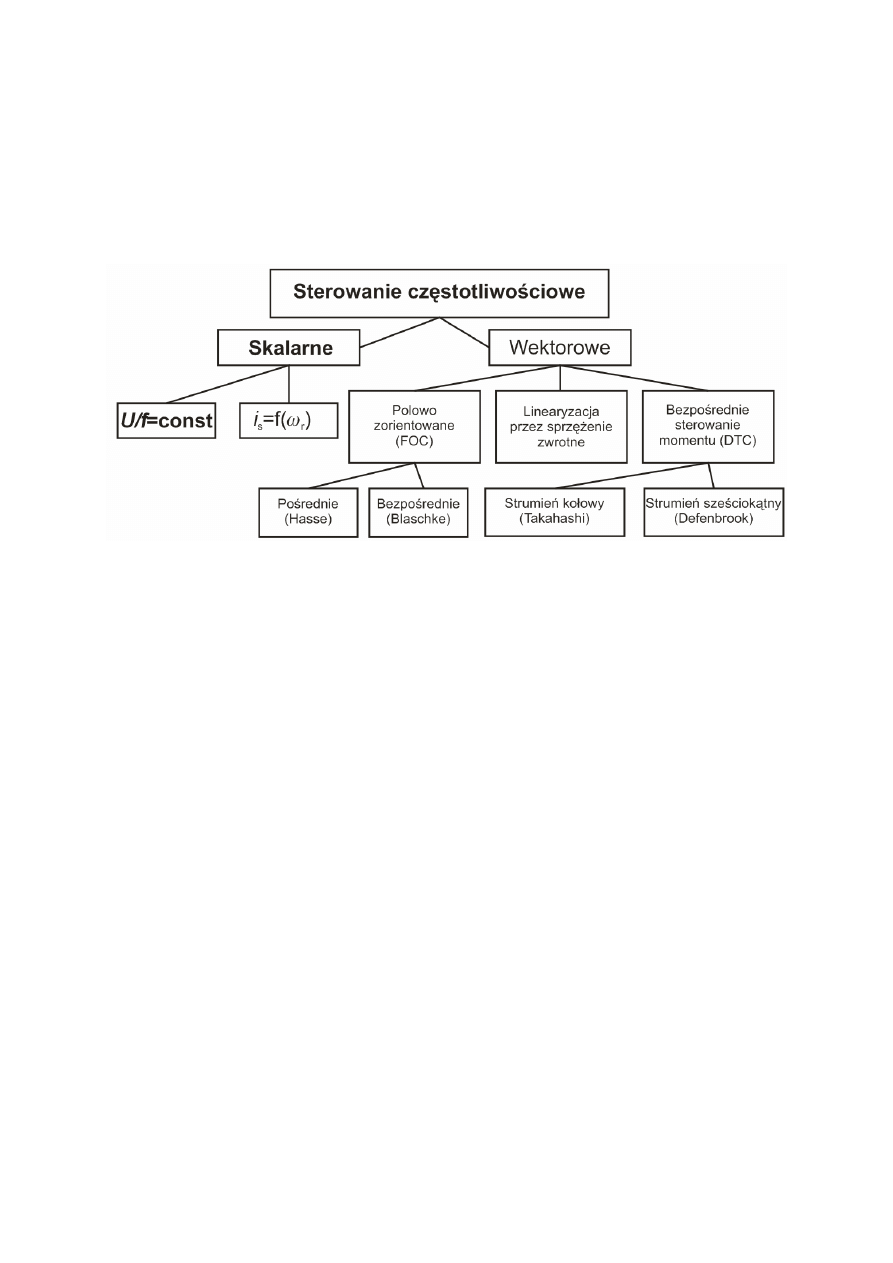
Rys.1. Podział metod sterowania częstotliwościowego silników indukcyjnych klatkowych
Instrukcja
1.
Układ pomiarowy.
Dane maszyn:
Silnik asynchroniczny:
P
N
= 2,2 kW; U
N
= 220/380 V; I
N
= 8,8/5,1 A; n = 1410 obr/min; cos
ϕ
= 0,8
Maszyna prądu stałego:
P
N
= 1,5 kW; U
N
= 220 V; I
N
= 6,5 A; n
N
= 2850 obr/min; I
f
= 0,25 A
Atr
~230V
4D
+
-
~
V
A
G
A
E1
A2
A1
E1
+
-
Miernik
parametrów
sieci 5A
U1
V1 W1
U1
V1 W1
L1
L2
L3
L1
L2
L3
L1
L2
L3
L1
L2
L3
Sonda
napięciowa
Sonda
prądowa
Sonda
napięciowa
Sonda
prądowa
M
3~
Falownik
wektorowy
Filtr
silnika
Dławik
silnika
f
U
= const
Oscyloskop
cyfrowy
Falownik
25A
I
max
=
E<200V
~230V
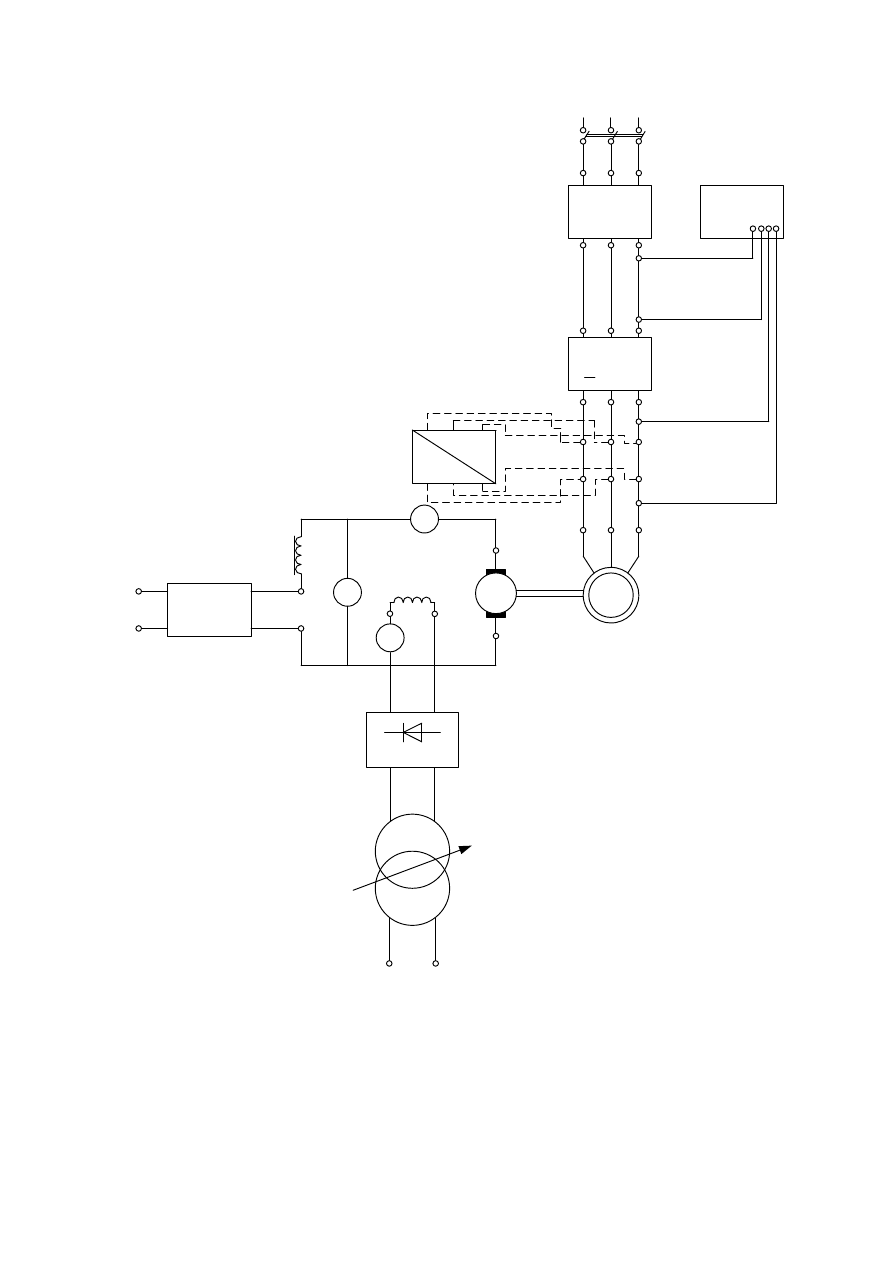
Rys.2. Schemat układu pomiarowego
2. Dane falownika DV51 firmy Moeller
Dane przemiennika serii DV51
Dane elektryczne
Znamionowe napi
ę
cie pracy
3-fazowe, 400 V AC (342 V -0% do 528 V +0%)
Cz
ę
stotliwo
ść
napi
ę
cia zasilania
50 / 60 Hz (47 Hz -0% do 53 Hz +0%)
Moc znamionowa wyj
ś
ciowa
2,2 kW
Metoda modulacji
Modulacja szeroko
ś
ci impulsu (PWM), sterowanie U/f
(liniowe, kwadratowe)
Cz
ę
stotliwo
ść
kluczowania
5 kHz (ustawienie fabryczne), mo
ż
e by
ć
regulowana w
zakresie 2 do 14 kHz
Napi
ę
cie wyj
ś
ciowe
3 AC U
e
Przeci
ąż
alno
ść
pr
ą
dowa
1,5 × I
e
przez 60 s w cyklu 600 s, dla odpowiedniej mocy
silnika
Cz
ę
stotliwo
ść
wyj
ś
ciowa
Zakres 0 do 400 Hz
Rozdzielczo
ść
0,1 Hz przy warto
ś
ci zadanej cyfrowo, maksymalna
cz
ę
stotliwo
ść
/1000 przy warto
ś
ci
zadanej analogowo
Granica bł
ę
du przy 25 °C ±10 °C
Warto
ść
zadana cyfrowo, ±0,01% maksymalnej
cz
ę
stotliwo
ś
ci
Warto
ść
zadana analogowo, ±0,2 % maksymalnej
cz
ę
stotliwo
ś
ci
Moment przy rozruchu
Od 1 Hz : 200 % i wy
ż
szy
Hamowanie pr
ą
dem stałym
0 do 100 %, zakres 0.5 do 60 Hz, czas trwania 0 do 60 s
Tranzystor hamowania Hamowanie dynamiczne z
zewn
ę
trznym rezystorem (około 150 do 80 %)
Obwód steruj
ą
cy
Napi
ę
cia wewn
ę
trzne
Steruj
ą
ce
24 V DC, maksymalnie 30 mA
Definicja warto
ś
ci zadanej
10 V DC, maksymalnie 10 mA
Przeka
ź
nik
Styk przeł
ą
czny
AC 250 V, 2,5 A (obci
ąż
enie rezystancyjne)
AC 250 V, 0,2 A (obci
ąż
enie indukcyjne, cos
ϕ
= 0,4)
AC 100 V, minimalnie 10 mA
DC 30 V, 3 A (obci
ąż
enie rezystancyjne)
DC 30 V, 0,7 A (obci
ąż
enie indukcyjne, cos
ϕ
= 0,4)
DC 5 V, minimalnie 100 mA
Wej
ś
cia i wyj
ś
cia
Wej
ś
cia analogowe
1 wej
ś
cie, 0 do 10 V, impedancja wej
ś
ciowa 10 k
Ω
1 wej
ś
cie, 4 do 20 mA, impedancja obci
ąż
enia 250
Ω
rozdzielczo
ść
10 bit.
Wyj
ś
cie analogowe
1 wyj
ś
cie, 0 do 10 V, maks. 1 mA
rozdzielczo
ść
8 bit.
Wej
ś
cia cyfrowe
6 swobodnie programowalnych wej
ść
do 27 V DC
impedancja wej
ś
ciowa 4,7 k
Ω
Wyj
ś
cia cyfrowe
2 wyj
ś
cia, otwarty kolektor
maksymalnie 27 V DC, 50 mA
Interfejs Szeregowy
RS 485 (Modbus RTU, do 19,2 kbit/s)
Panel obsługi (opcjonalny)
DEX-KEY-6, DEX-KEY-61
Przyciski
6 przycisków funkcyjnych do sterowania i parametryzacji
DV51
Wy
ś
wietlacz
Czteroznakowy 7-segmentowy oraz 8 diod
sygnalizacyjnych LED
Nastawa warto
ś
ci zadanej: potencjometr (dla DEX-KEY-6)
3.
Pomiary w układzie zasilania silnika indukcyjnego
bezpośrednio z falownika wektorowego.
3.1.
Pomiar charakterystyk mechanicznych
ω
ωω
ω
= f (M
o
), silnika indukcyjnego
zasilanego bezpośrednio z falownika wektorowego.
Dla kilku dwóch wartości częstotliwości wyznaczyć charakterystyki mechaniczne
ω
= f (M
o
).
Wyniki zestawić w tabeli 1.
Tabela 1.
n
I
ś
r
U
ś
r
P
Q
S
cos
ϕϕϕϕ
U
o
I
o
M
o
ω
ωω
ω
ηηηη
Lp.
obr/
min
A
V
W
Var
VA
-
V
A
Nm rad/s
-
3.2
Wyznaczenie współczynnika mocy cos
ϕϕϕϕ
= f (M
o
) i sprawności
ηηηη
= f (M
o
) silnika
indukcyjnego zasilanego bezpośrednio z falownika wektorowego.
Dla przeprowadzonych wyżej pomiarów i obliczeń wykreślić cos
ϕ
= f (M
o
) i
η
= f (M
o
),
silnika indukcyjnego zasilanego z falownika wektorowego.
3.3.
Pomiar charakterystyk regulacji
ω
ωω
ω
= f (f) przy M
o
= const.
Na podstawie pomiarów i obliczeń dla stałego obciążenia M = const. wykreślić
charakterystykę regulacji
ω
= f (f). Wyniki zestawić w tabeli 2.
Tabela 2.
f
n
ω
ωω
ω
Lp.
Hz
obr/min
rad/s
Uwagi
3.4
Rejestracja przebiegów czasowych napięć i prądów.
4.
Pomiary w układzie zasilania silnika indukcyjnego z
falownika wektorowego zastosowaniem dławika silnikowego.
4.1.
Pomiar charakterystyk mechanicznych
ω
ωω
ω
= f (M
o
), silnika indukcyjnego
zasilanego z falownika wektorowego zastosowaniem dławika silnikowego..
Dla kilku dwóch wartości częstotliwości wyznaczyć charakterystyki mechaniczne
ω
= f (M
o
).
Wyniki zestawić w tabeli 3.
Tabela 3.
n
I
ś
r
U
ś
r
P
Q
S
cos
ϕϕϕϕ
U
o
I
o
M
o
ω
ωω
ω
ηηηη
Lp.
obr/
min
A
V
W
Var
VA
-
V
A
Nm rad/s
-
4.2
Wyznaczenie współczynnika mocy cos
ϕϕϕϕ
= f (M
o
) i sprawności
ηηηη
= f (M
o
) silnika
indukcyjnego zasilanego z falownika wektorowego zastosowaniem dławika silnikowego..
Dla przeprowadzonych wyżej pomiarów i obliczeń wykreślić cos
ϕ
= f (M
o
) i
η
= f (M
o
),
silnika indukcyjnego zasilanego z falownika wektorowego.
4.3
Pomiar charakterystyk regulacji
ω
ωω
ω
= f (f) przy M
o
= const.
Na podstawie pomiarów i obliczeń dla stałego obciążenia M = const. wykreślić
charakterystykę regulacji
ω
= f (f). Wyniki zestawić w tabeli 4.
Tabela 4.
f
n
ω
ωω
ω
Lp.
Hz
obr/min
rad/s
Uwagi
4.4
Rejestracja przebiegów czasowych napięć i prądów.
5.
Pomiary w układzie zasilania silnika indukcyjnego z
falownika wektorowego zastosowaniem filtra silnikowego.
5.1
Pomiar charakterystyk mechanicznych
ω
ωω
ω
= f (M
o
), silnika indukcyjnego
zasilanego z falownika wektorowego zastosowaniem filtra silnikowego.
Dla kilku dwóch wartości częstotliwości wyznaczyć charakterystyki mechaniczne
ω
= f (M
o
).
Wyniki zestawić w tabeli 5.
Tabela 5.
n
I
ś
r
U
ś
r
P
Q
S
cos
ϕϕϕϕ
U
o
I
o
M
o
ω
ωω
ω
ηηηη
Lp.
obr/
min
A
V
W
Var
VA
-
V
A
Nm rad/s
-
5.2
Wyznaczenie współczynnika mocy cos
ϕϕϕϕ
= f (M
o
) i sprawności
ηηηη
= f (M
o
) silnika
indukcyjnego zasilanego z falownika wektorowego zastosowaniem filtra silnikowego.
Dla przeprowadzonych wyżej pomiarów i obliczeń wykreślić cos
ϕ
= f (M
o
) i
η
= f (M
o
),
silnika indukcyjnego zasilanego z falownika wektorowego.
5.3
Pomiar charakterystyk regulacji
ω
ωω
ω
= f (f) przy M
o
= const.
Na podstawie pomiarów dla stałego obciążenia M = const. wykreślić charakterystykę
regulacji
ω
= f (f). Wyniki zestawić w tabeli 6.
Tabela 6.
f
n
ω
ωω
ω
Lp.
Hz
obr/min
rad/s
Uwagi
5.4
Rejestracja przebiegów czasowych napięć i prądów.

6.
Sprawozdanie
W sprawozdaniu należy umieścić:
1.
Parametry badanego układu pomiarowego
2.
Schemat pomiarowy badanego układu
3.
Tabele pomiarowe.
4.
Charakterystyki pomierzone zgodnie z programem ćwiczenia.
5.
Zarejestrowane przebiegi czasowe.
6.
Własne wnioski i spostrzeżenia.
Wyszukiwarka
Podobne podstrony:
Instrukcja do ćw 06 Sterowanie pracą silnika indukcyjnego za pomocą falownika
Falowniki LG seria iC5 instrukcja polska
Photoshop-Dodatki i instrukcje, Narzędzia wektorowe w Photoshopie, Narzędzia wektorowe w Photoshopie
Instrukcja R1 Falownik
Instrukcja AS falownik naped
Instrukcja do ćw 06 Sterowanie pracą silnika indukcyjnego za pomocą falownika
Instrukcja R1 Falownik
Falowniki LG seria iC5 instrukcja polska
Instrukcja do ćw 06 Sterowanie pracą silnika indukcyjnego za pomocą falownika
FALOWNIK INSTRUKCJA Xtravert 4211105F
wykład 6 instrukcje i informacje zwrotne
Instrumenty rynku kapitałowego VIII
05 Instrukcje warunkoweid 5533 ppt
Instrukcja Konwojowa
ruch wektorowy
2 Instrumenty marketingu mix
więcej podobnych podstron