
Opracował: dr inż. Wiesław Mościcki
8
Podstawy Konstrukcji Urządzeń Precyzyjnych
Przekładnie zębate walcowe
o zębach prostych
Obliczenia
Warszawa 2011
Przekładnie zębate walcowe
1. Zarys odniesienia uzębień drobnomodułowych (m < 1)
Stosuje się dwa zarysy:
-
bez konstrukcyjnego luzu obwodowego (s = w = 0,5
⋅π⋅m) oraz
-
z konstrukcyjnym luzem obwodowym (s = 0,45
⋅π⋅m, w = 0,55⋅π⋅m)
Wspólne parametry obu zarysów to: y = 1, u = 1,4, α = 20
o
2. Graniczna, minimalna liczba zębów
Graniczna liczba zębów – dla danego zarysu odniesienia najmniejsza
liczba zębów jaką można wykonać bez potrzeby stosowania korekcji
uzębienia.
α
2
g
sin
y
2
z
=
gdzie: z
g
– graniczna liczba zębów, y – współczynnik wysokości głowy
zęba, α – kąt zarysu; dla y = 1 i α = 20
o
z
g
= 17.
Minimalna liczba zębów – najmniejsza liczba zębów jaką można wy-
konać ze względu na zaostrzenie wierzchołka.
z
min
= 8 (dla zarysu bez luzu obwodowego)
z
min
= 10 (dla zarysu z luzem obwodowym)
3. Korekcja
uzębienia i zazębienia
3.1. Korekcja technologiczna uzębienia
Jeśli liczba zębów koła z < 17, do zlikwidowania podcięcia zębów ko-
nieczne jest podczas obróbki odsunięcie zarysu narzędzia o
X = x
⋅
m
gdzie: x – współczynnik przesunięcia zarysu wynoszący wyznaczany
ze wzoru:
g
g
z
z
z
y
x
−
=
Wymiary koła korygowanego:
2
- średnica podziałowa:
d = m
⋅z,
- średnica zasadnicza:
d
b
= m
⋅z⋅cosα,
- średnica wierzchołków:
d
a
= m(z + 2y + 2x),
- średnica stóp:
d
f
= m(z – 2u + 2x)
3.2. Korekcja zazębienia
3.2.1. Korekcja
zazębienia typu P-0
Cechą tej korekcji jest zachowanie zerowej (czyli takiej jak w przekład-
ni niekorygowanej) odległości osi.
(
)
2
1
0
z
z
m
5
,
0
a
+
⋅
⋅
=
Aby ten warunek był możliwy do spełnienia suma zębów współpracu-
jących kół musi być większa lub równa podwojonej granicznej liczbie
zębów, czyli
z
1
+ z
2
≥ 2 z
g
Korekcję przeprowadza się tylko wtedy, gdy jedno z kół ma liczbę zę-
bów z
1
< z
g
. Podczas wykonania kół należy narzędzie odsunąć od
mniejszego koła o
X
oraz jednocześnie dosunąć narzędzie o taką sa-
mą wartość
X
do większego koła.
Wymiary kół w korygowanej przekładni
d
1
= m ·z
1
d
2
= m ·z
2
d
b1
= m · z
1
· cosα
d
b2
= m · z
2
· cosα
d
a1
= m (z
1
+ 2y + 2x)
d
a2
= m (z
2
+ 2y – 2x)
d
f1
= m (z
1
– 2u + 2x)
d
f2
= m (z
2
– 2u – 2x)
a
o
= 0,5 m (z
1
+ z
2
)
3.2.2. Korekcja
zazębienia typu P
3.2.2.1. Korekcja typu P – technologiczna
Jej celem jest zlikwidowanie podcięcia zębów w jednym z kół oraz do-
branie odległości osi a
r
takiej, przy której luz obwodowy w przekładni
nie ulegnie zmianie.
Warunki stosowania korekcji technologicznej typu P:
3
z
1
< z
g
lub / i
z
2
< z
g
oraz
z
1
+ z
2
< z
g
3.2.2.2. Korekcja typu P – konstrukcyjna
Przy danych parametrach kół (z
1
, z
2
, m) zadana jest odległość osi a
r
inna niż wynikająca z obliczeń dla korekcji P-0 (a
r
≠ a
o
). Należy zatem
obliczyć wartości współczynników przesunięcia x
1
oraz x
2
, a także
wymiary kół takie, aby luz obwodowy w przekładni miał normalne war-
tości oraz aby nie wystąpiła interwencja zarysów.
W obu przypadkach korekcji P należy korzystać z podręczników do
Podstaw Konstrukcji Maszyn lub do PKUP.
4. Przełożenie przekładni zębatej
2
1
2
1
n
n
i
=
=
ω
ω
1
2
1
2
z
z
d
d
i
=
=
gdzie: ω
1,2
– prędkość kątowa s
-1
,
n
1,2
– prędkość obrotowa min
-1
,
d
1,2
– średnice podziałowe kół, z
1,2
– liczba zębów kół
W przekładniach drobnomodułowych
10
i
10
1
≤
≤
, w przekładniach
napędowych
i ≤ 8
.
Przełożenie przekładni wielostopniowej
i
c
= i
1
⋅
i
2
⋅
i
3
⋅
…..
⋅
i
n
,
gdzie i
i
przełożenie jednego stopnia
W przekładniach drobnomodułowych zwykle przyjmujemy rosnący ciąg
przełożeń
i
1
< i
2
< i
3
< ….. < i
n
np. przełożenie i
c
= 1000, można zrealizować stosując następujący
rozkład przełożeń cząstkowych: i
c
= 4•
⋅5•⋅6,25•8
4
5. Podstawowe obliczenia wytrzymałościowe kół zębatych [1]
5.1. Wstępne obliczenia modułu koła
3
g
k
z
q
M
26
,
1
m
⋅
⋅
⋅
⋅
=
ψ
gdzie: M – moment obciążający koło w mNm (zębnik),
m
b
=
ψ
, zaś
b – szerokość wieńca zębatego), dla kół drobnomodułowych zalecana
jest wartość
ψ = 4 ÷ 6
,
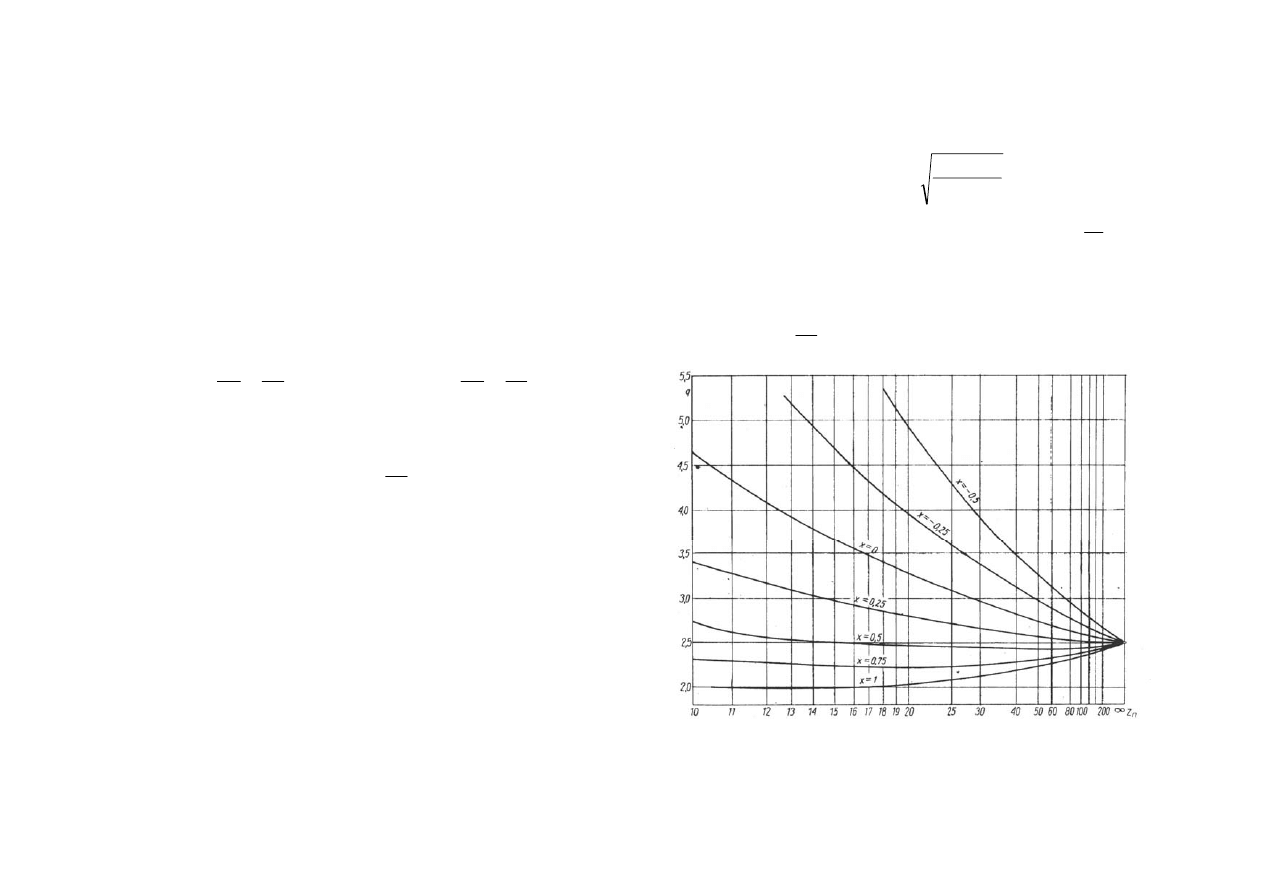
q – współczynnik kształtu zęba (rys. 1), k
g
– dopuszczalne naprężenia
zginające (
2
gj
g
z
k
=
), z – liczba zębów zębnika.
Rys. 1. Wartości współczynnika kształtu zęba q dla kół o uzębieniu
zewnętrznym [1], z
n
– liczba zębów koła
5
Materiał
stal 45 stale 25, A11,
St 5
brąz B7
mosiądze
MO59, MO 63
z
gj
MPa
300
250
120
100
5.2. Sprawdzenie naprężeń zginających u podstawy zęba
p
k
z
m
gj
r
d
p
z
y
y
x
y
z
K
K
K
m
b
q
q
P
⋅
⋅
⋅
≤
⋅
⋅
⋅
⋅
⋅
⋅
=
ε
σ
gdzie:
]
N
[
d
M
2
P
=
,
ε
ε
1
q
=
,
ε – wskaźnik zazębienia
K
p
= 1,5 – współczynnik przeciążenia,
K
d
= 1,2 – współczynnik nadwyżek dynamicznych,
K
r
= 1,1 – współczynnik nierównomiernego rozkładu obciążenia na
szerokości zęba,
m
b
2
64
,
0
y
m
⋅
+
=
– współczynnik wielkości zęba,
x
z
– 1,5 ÷ 2 – współczynnik bezpieczeństwa,
y
p
= 1,1 – współczynnik stanu powierzchni,
y
k
= 1 – współczynnik karbu u podstawy zęba.
Uwaga: Sprawdzenie naprężeń jest zbędne jeśli moduł dobrano więk-
szy niż obliczony w pkt, 5.1
5.3. Sprawdzenie nacisków powierzchniowych (według Hertza)
Naprężenia ściskające maksymalne
H
c
obl
2
1
2
1
max
H
k
i
i
1
d
b
P
2
sin
)
E
E
(
E
E
4
,
1
≤
⎟
⎠
⎞
⎜
⎝
⎛ +
⋅
⋅
⋅
⋅
+
⋅
⋅
=
α
σ
gdzie: E
1
, E
2
– moduł Younga materiałów kół, α – kąt przyporu,
r
d
p
c
obl
K
K
K
d
M
2
P
⋅
⋅
⋅
=
(dla koła czynnego),
6
d
c
– średnica podziałowa koła czynnego,
k
H
– dopuszczalne naciski powierzchniowe.
i – przełożenie;
1
2
z
z
i
=
, z
1
– liczba zębów koła czynnego.
Oznaczając:
α
α
2
sin
)
E
E
(
E
E
4
,
1
C
2
1
2
1
m
⋅
+
⋅
⋅
=
otrzymamy:
H
c
obl
m
max
H
k
i
i
1
d
b
P
C
≤
⎟
⎠
⎞
⎜
⎝
⎛ +
⋅
⋅
⋅
=
α
σ
Materiał stal
45 Stal
A11
brąz
B7
mosiądze
MO59, MO 63
k
H
MPa 325 230 160
120
Jeśli: E
1
= E
2
= 2,1·10
5
MPa (stal) to
C
mα
= 478,2
E
1
= 2,1·10
5
MPa, E
2
= 1,05·10
5
MPa (stal - brąz) to
C
mα
= 390,6
Wymiar
⎟
⎠
⎞
⎜
⎝
⎛ +
⋅
⋅
⋅
≥
⋅
i
i
1
k
M
C
2
d
b
2
H
1
o
2
m
2
c
α
gdzie:
2
d
P
M
c
obl
1
o
=
- moment przenoszony przez koło czynne.
Literatura
1. Müller L.: Przekładnie zębate. Obliczenia wytrzymałościowe. WNT,
Warszawa, 1972
7
Wyszukiwarka
Podobne podstrony:
Lab 05 Obliczenia w C id 257534 Nieznany
Algorytmy obliczen id 57749 Nieznany
Oblicz (2) id 327340 Nieznany
platew obliczenia id 343774 Nieznany
Obliczenia id 399360 Nieznany
obliczanie W id 327497 Nieznany
Oblicz id 327336 Nieznany
obliczenia 5 id 327543 Nieznany
obliczenia(1) id 327780 Nieznany
mosty obliczenia id 308208 Nieznany
obliczenia 7 id 327545 Nieznany
obliczenia 3 id 327540 Nieznany
pdf obliczenia id 801259 Nieznany
OBLICZENIA 6 id 327544 Nieznany
Lab 05 Obliczenia w C id 257534 Nieznany
Algorytmy obliczen id 57749 Nieznany
Oblicz (2) id 327340 Nieznany
platew obliczenia id 343774 Nieznany
Obliczenie czasu operacji id 32 Nieznany
więcej podobnych podstron