
PODSTAWY LOGIKI
ROZMYTEJ
Dariusz Badura

Czym jest Logika Rozmyta
Fuzzy-Logic?
• Klasyczna logika
bazuje na dwóch wartościach
reprezentowanych najczęściej przez: 0 i 1 lub prawda i fałsz.
Granica między nimi jest jednoznacznie określona i
niezmienna.
• Logika rozmyta
stanowi rozszerzenie klasycznego
rozumowania na rozumowanie bliższe ludzkiemu. Wprowadza
ona wartości pomiędzy standardowe 0 i 1; ‘rozmywa’ granice
pomiędzy nimi dając możliwość istnienia wartości z pomiędzy
tego przedziału (np.: prawie fałsz, w połowie prawda).
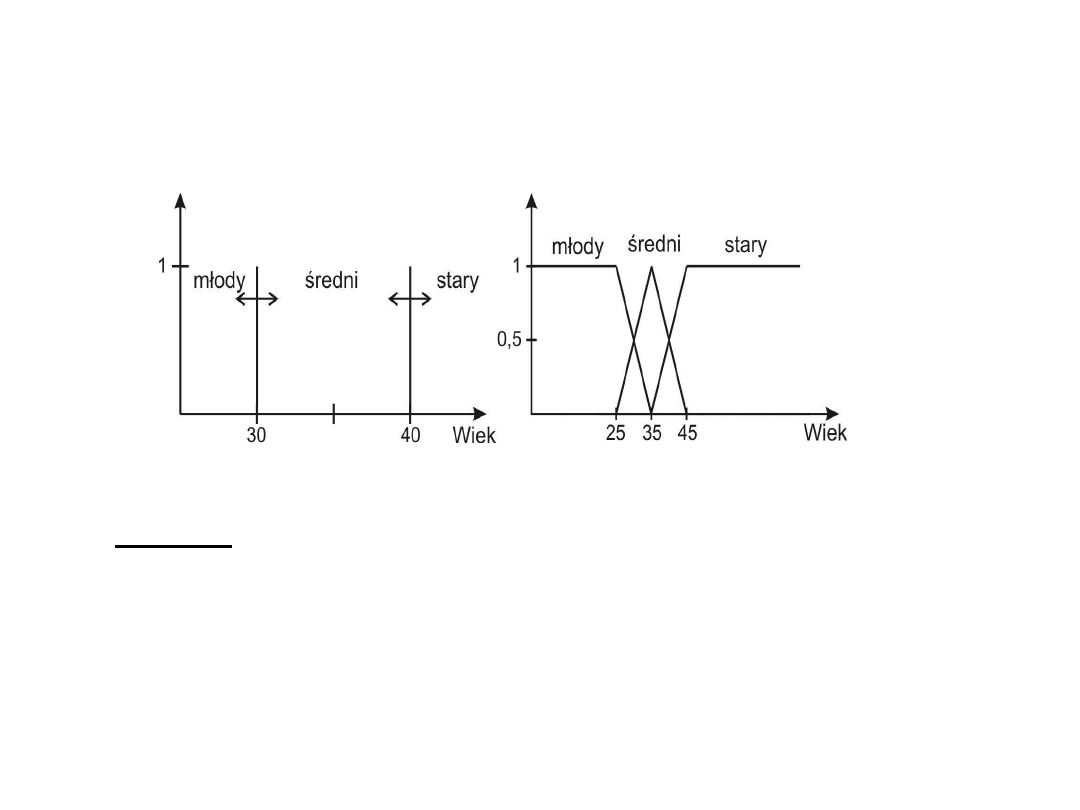
Logika Rozmyta
• Przykład: Polem naszego przykładu niech będzie wiek ludzi. Chcemy
określić granice między ludźmi młodymi, w średnim wieku i starymi. W
klasycznej logice będziemy zmuszeni przyjąć stałe niezmienne granice,
jak na przykład dla ludzi młodych moglibyśmy przyjąć 0 a 30 lat, dla ludzi
w średnim wieku 30 a 40 lat i dla ludzi starych 40 i więcej lat.
Logika Rozmyta
Klasyczna logika
Logika rozmyta
Definicja zbioru rozmytego
jest funkcją przynależności zbioru rozmytego A. Funkcja ta każdemu
elementowi x
∈ X przypisuje jego stopień przynależności do zbioru rozmytego
A, przy czym można wyróżnić 3 przypadki:
μ
A
(x
) = 1 oznacza pełną przynależność do zbioru rozmytego A, tzn. x
∈ A,
μ
A
(x
) = 0 oznacza brak przynależności elementu x do zbioru rozmytego A, tzn.
x
∉ A,
0 <
μ
A
(x
) < 1 oznacza częściową przynależność elementu x do zbioru
rozmytego A.
Zbiorem rozmytym A w pewnej (niepustej) przestrzeni X, co zapisujemy jako A
⊆
X
, nazywamy zbiór par
}
));
(
,
{(
A
X
x
x
x
A
gdzie:
]
1
,
0
[
: X
A

Zastosowanie logiki rozmytej
• Logika rozmyta jest stosowana wszędzie tam, gdzie użycie klasycznej
logiki stwarza problem ze względu na trudność w zapisie matematycznym
procesu lub gdy wyliczenie lub pobranie zmiennych potrzebnych do
rozwiązania problemu jest niemożliwe.
• Ma szerokie zastosowanie w różnego rodzaju sterownikach. Sterowniki te
mogą pracować w urządzeniach tak pospolitych jak lodówki czy pralki, jak
również mogą być wykorzystywane do bardziej złożonych zagadnień jak
przetwarzanie obrazu, rozwiązywanie problemu korków ulicznych czy
unikanie kolizji.
• Sterowniki wykorzystujące logikę rozmytą są również używane na
przykład w połączeniu z sieciami neuronowymi.
Zapis symboliczny zbiorów rozmytych
X
jest przestrzenią o skończonej liczbie elementów, X = {x
1
, ..., x
n
}:
n
i
i
i
A
n
n
A
A
x
x
x
x
x
x
1
1
1
)
(
)
(
)
(
A
X
jest przestrzenią o nieskończonej liczbie elementów:
X
A
x
x)
(
A

Podstawy matematyczne
• Przykład: weźmy zbiór mieszkańców pewnego miasta. Podzbiorem będą
osoby posiadające samochód. Osoby należące do tego zbioru możemy
również przedstawić za pomocą argumentów składających się dwóch
wartości. Pierwszą z nich jest wartość odpowiadająca osobie, natomiast
drugą jest liczba 1 lub 0, w zależności czy dana osoba posiada samochód
czy też nie. Mając w ten sposób oznaczone elementy zbioru, aby
stwierdzić, czy są częścią naszego podzbioru wystarczy odszukać te, które
na drugiej pozycji mają jedynkę. Zbiór taki może mieć następujące
elementy:
• Miasto1 = { Marek,1; Ania,0; Piotr,0; Maja,1 }
Dzięki takiemu zapisowi wiemy, że osobami posiadającymi samochód i
należącymi do naszego podzbioru są Marek i Maja.
Zbiory – logika klasyczna

Zbiory rozmyte
• Podzbiór rozmyty Z zbioru Y tak samo może być reprezentowany przez
dwuargumentowy zestaw wartości, w których pierwszy element odpowiada
wartości zbioru Y, a drugi przyjmuje wartości ze zbioru [0;1].
• Podobnie jak w zwykłym zbiorze drugi element określa przynależność do
podzbioru Z, z tą różnicą, że oprócz ‘całkowitej’ przynależności do niego
(dla 1) i ‘całkowitym’ brakiem tej przynależności (dla 0), posiadamy
informacje o tzw. „stopniu przynależności” do podzbioru Z (określoną
wartościami z przedziału 0-1).
• Stopień Przynależności stanowi dla nas informację, jak daleko element y
jest oddalony od naszego podzbioru Z. Określamy go dzięki
Funkcji
Przynależności.
Zbiory rozmyte
•
Przykład.
Niech naszym
- zbiorem Y będą osoby, a
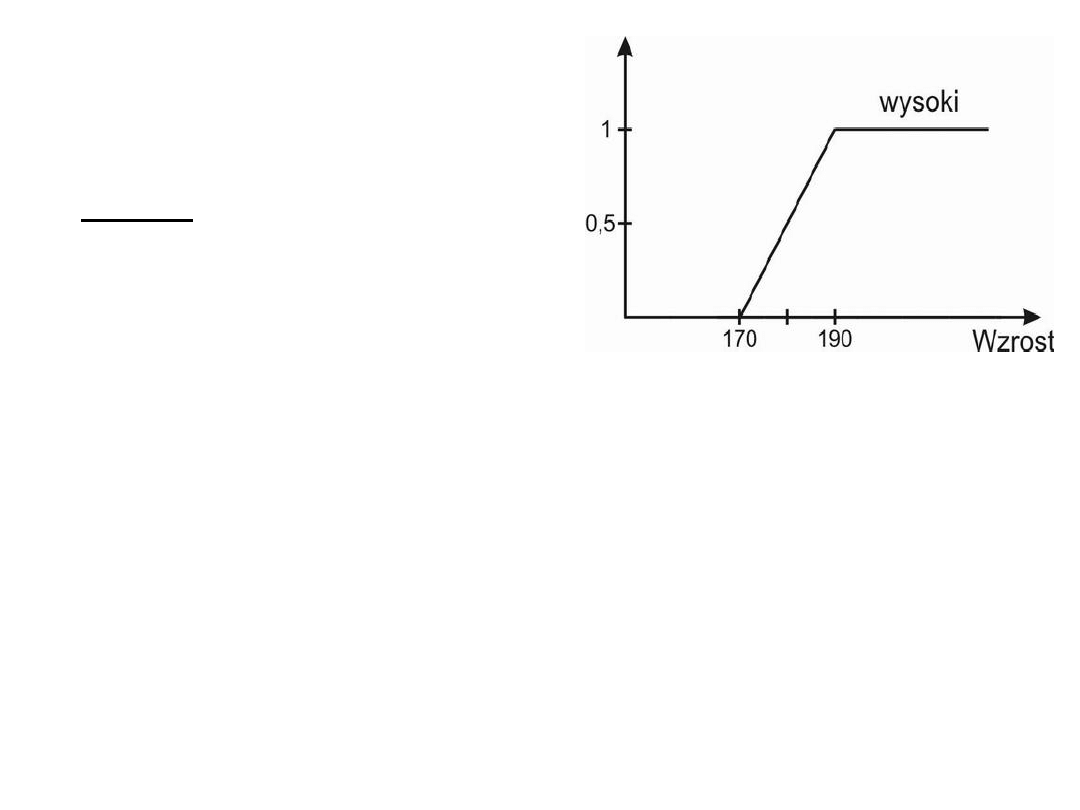
- zbiorem rozmytym Z – osoby wysokie.
Zbiór Z będzie nam mówił, w jakim stopniu dana osoba ze zbioru Y
przynależy do zbioru osób wysokich. W tym celu musimy ułożyć funkcję
przynależności dla naszego zbioru rozmytego bazującą na wzroście.
Np.:
Z(y) = ( 0 wzrost < 170 cm
[Z(y) – 170]/20 170 cm > wzrost < 190 cm
1 wzrost > 190 cm )
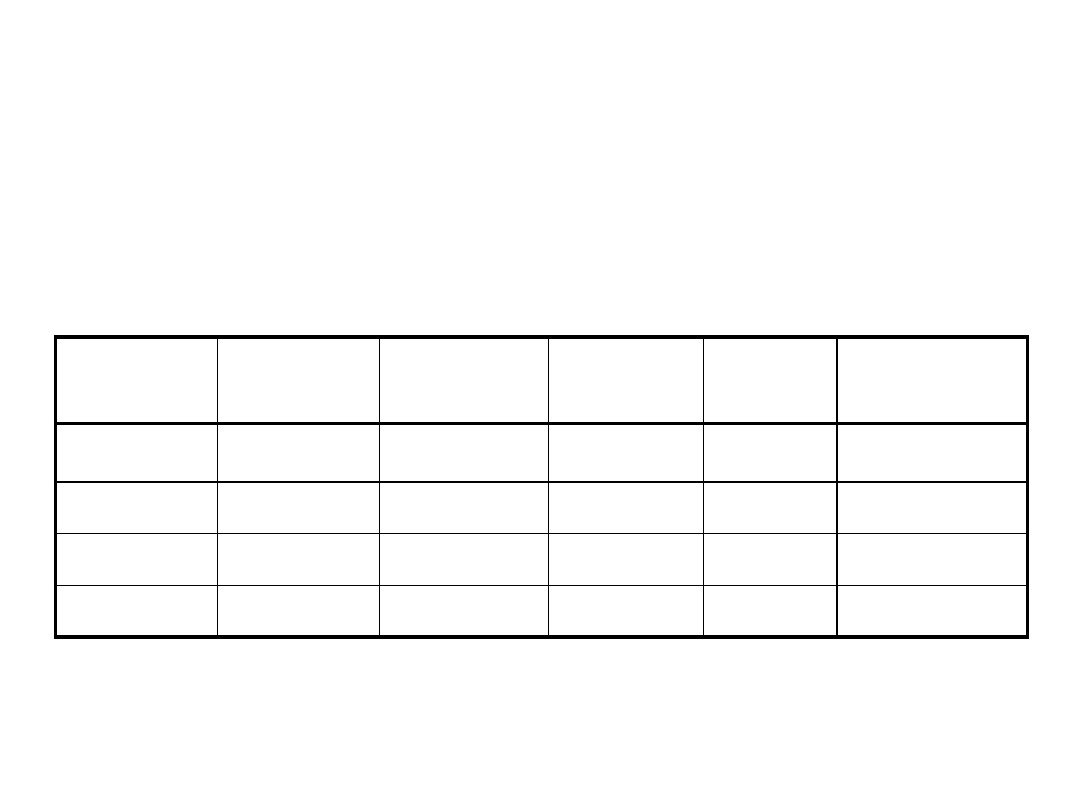
Zbiory rozmyte c.d.
Osoba Y
Wzrost
Stopień
Przynależności
d
o Z
Osoba Y
Wzrost
Stopień
Przynależności
d
o Z
Kamil
139
0
Darek
193
1
Sławek
182
0,6
Zbyszek
128
0
Mariusz
179
0,45
Karol
175
0,25
Jacek
187
0,85
Dzięki zastosowanej funkcji przynależności uzyskujemy następujące
dane:
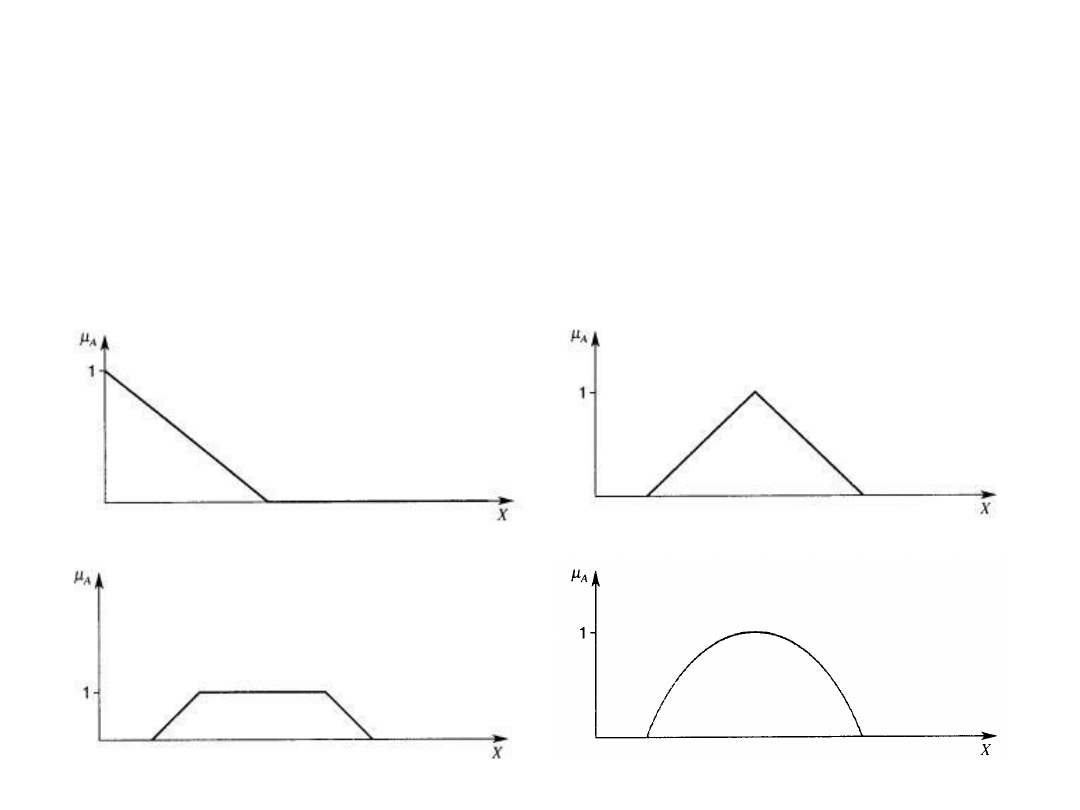
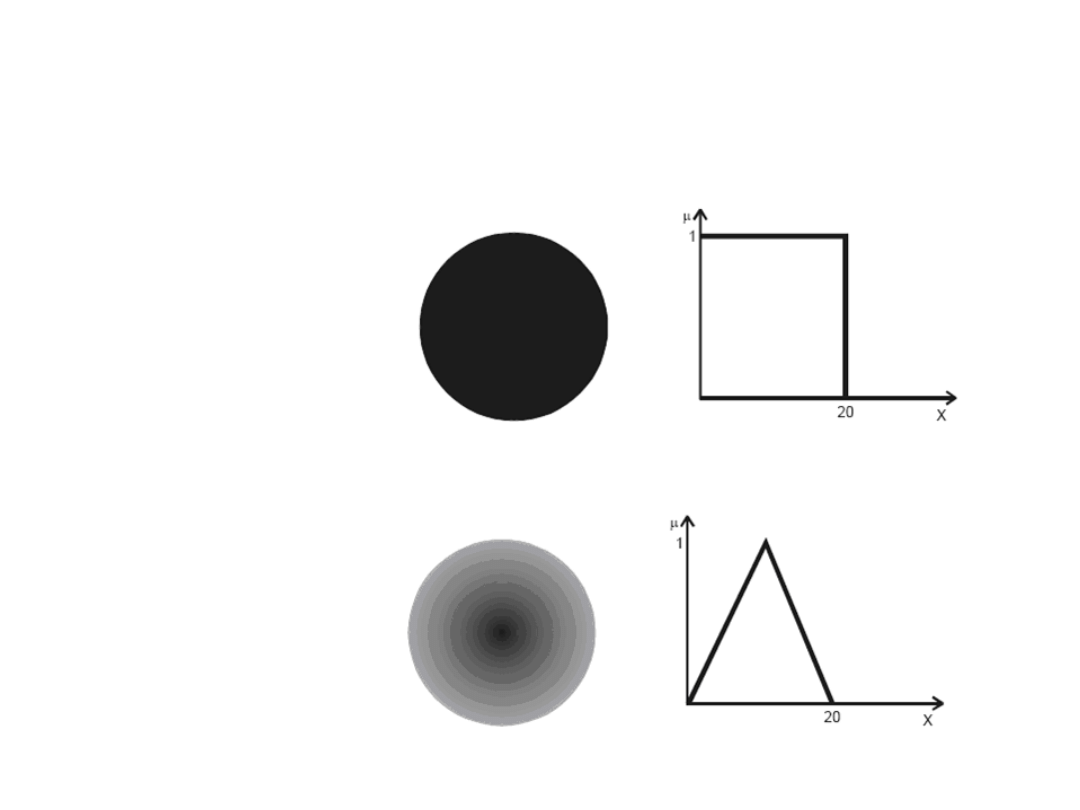
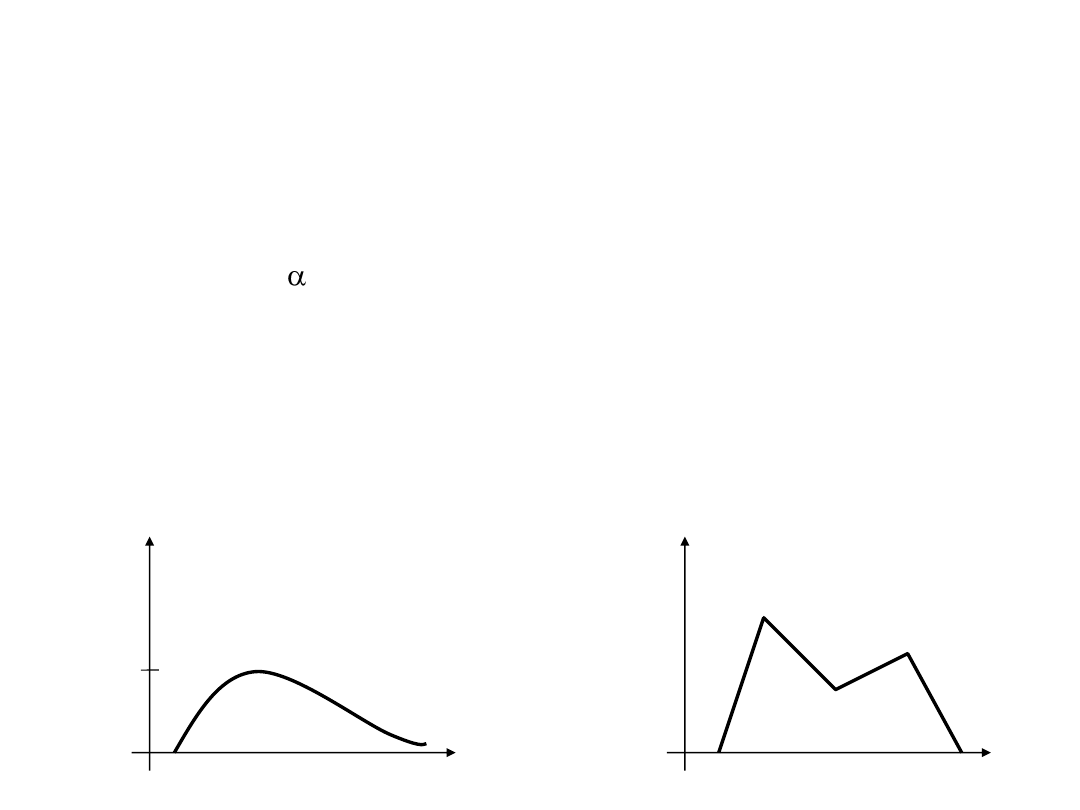
Funkcje przynależności
Funkcja przynależności może mieć bardziej złożony kształt. W zdecydowanej
większości przypadków jako funkcje przynależności stosuje się trójkąty, ale
mogą to być też trapezy lub parabole
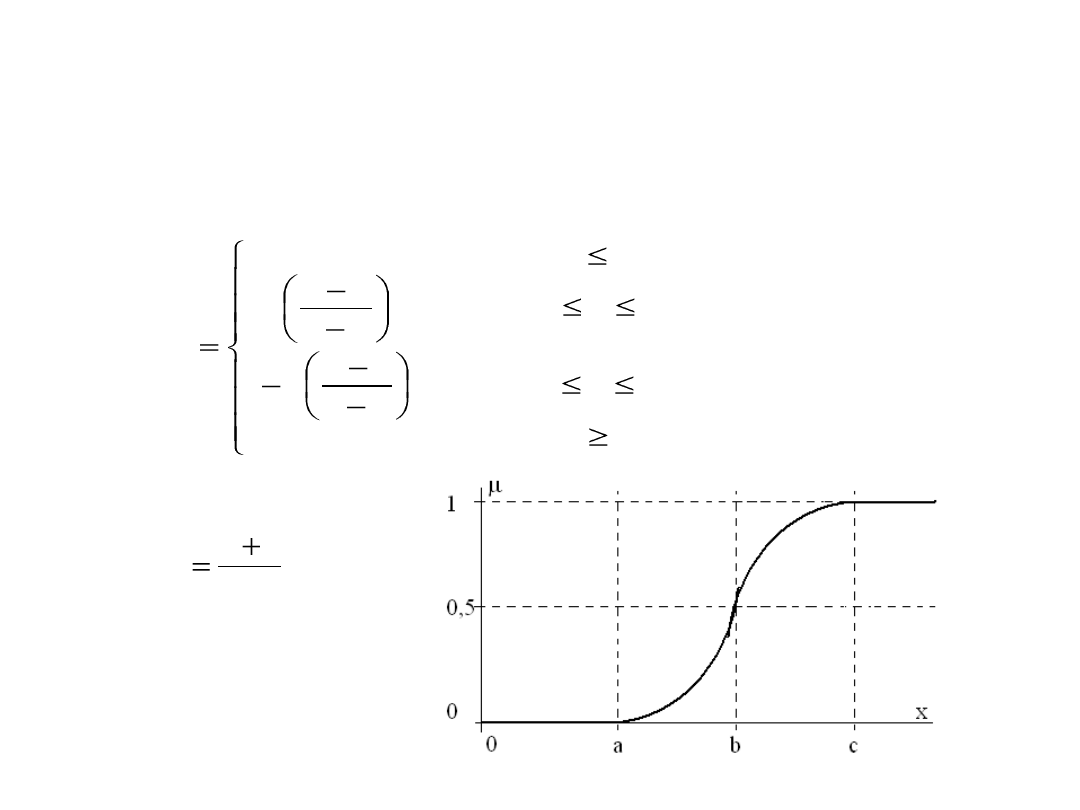
Standardowe postaci funkcji
przynależności
1. Funkcja przynależności klasy s:
c
x
c
x
b
a
c
c
x
b
x
a
a
c
a
x
a
x
c
b
a
x
s
dla
1
dla
2
1
dla
2
dla
0
)
,
,
;
(
2
2
gdzie
2
c
a
b
Standardowe postaci funkcji
przynależności
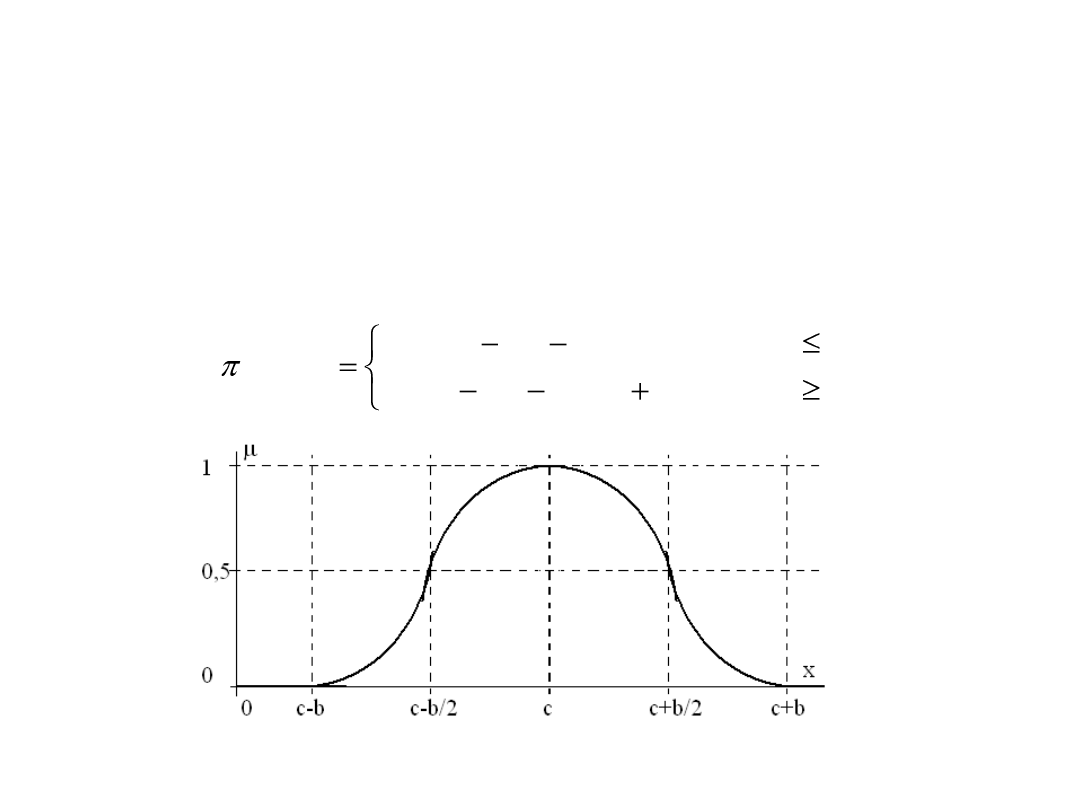
2. Funkcja przynależności klasy π:
c
x
b
c
b
c
b
c
x
s
c
x
c
b
c
b
c
x
s
c
b
x
dla
)
,
2
/
,
;
(
dla
)
,
2
/
,
;
(
)
,
;
(
zdefiniowana poprzez klasę s
Standardowe postaci funkcji
przynależności
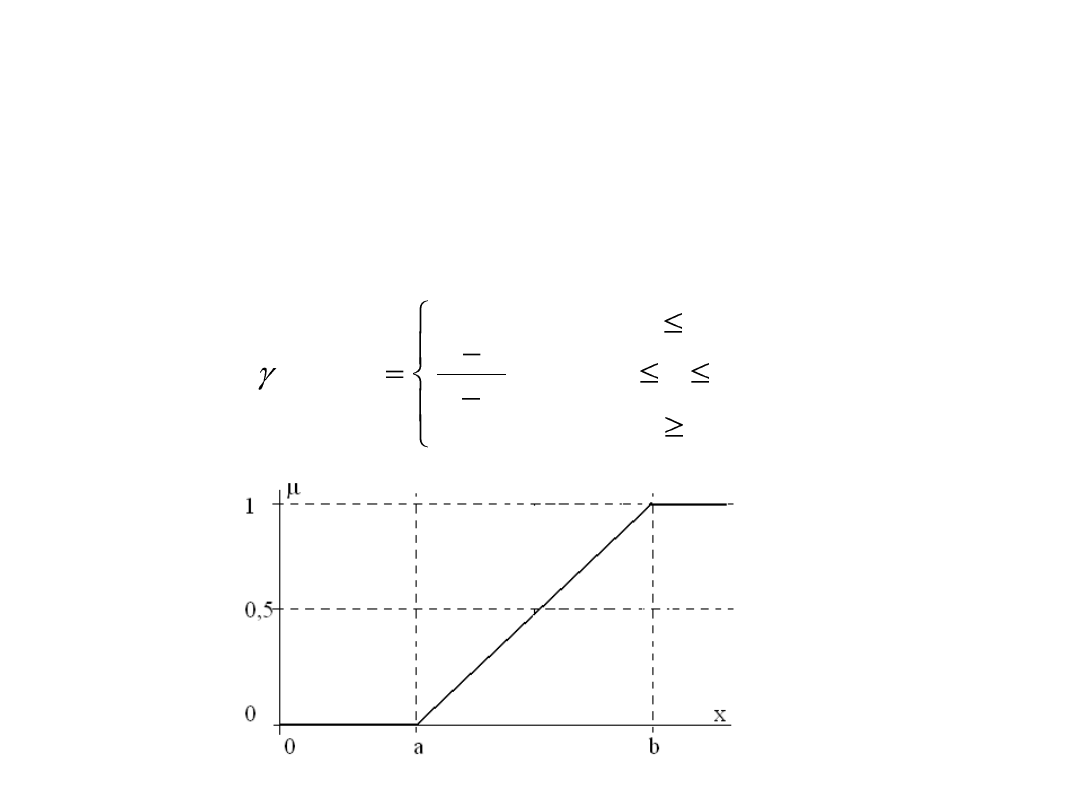
3. Funkcja przynależności klasy γ:
b
x
b
x
a
a
b
a
x
a
x
b
a
x
dla
1
dla
dla
0
)
,
;
(
Standardowe postaci funkcji
przynależności
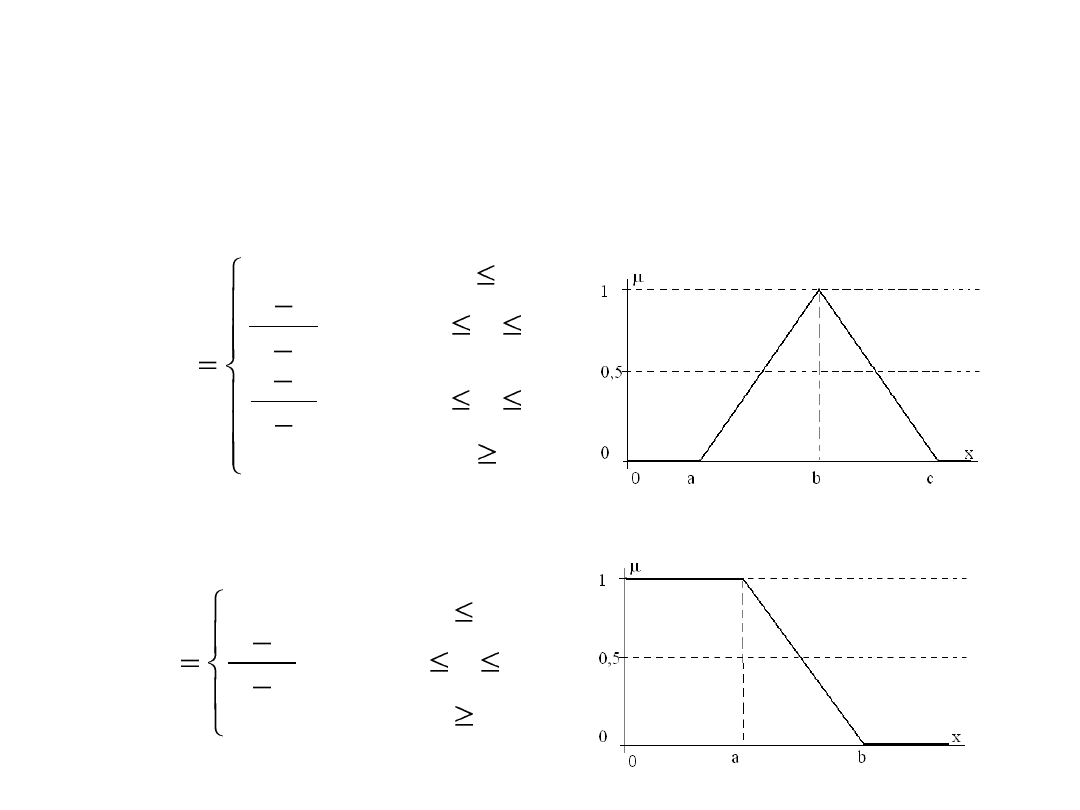
4. Funkcja przynależności klasy t:
5. Funkcja przynależności klasy L:
c
x
c
x
b
b
c
x
c
b
x
a
a
b
a
x
a
x
c
b
a
x
t
dla
0
dla
dla
dla
0
)
,
,
;
(
b
x
b
x
a
a
b
x
b
a
x
b
a
x
L
dla
0
dla
dla
1
)
,
;
(
Standardowe postaci funkcji
przynależności
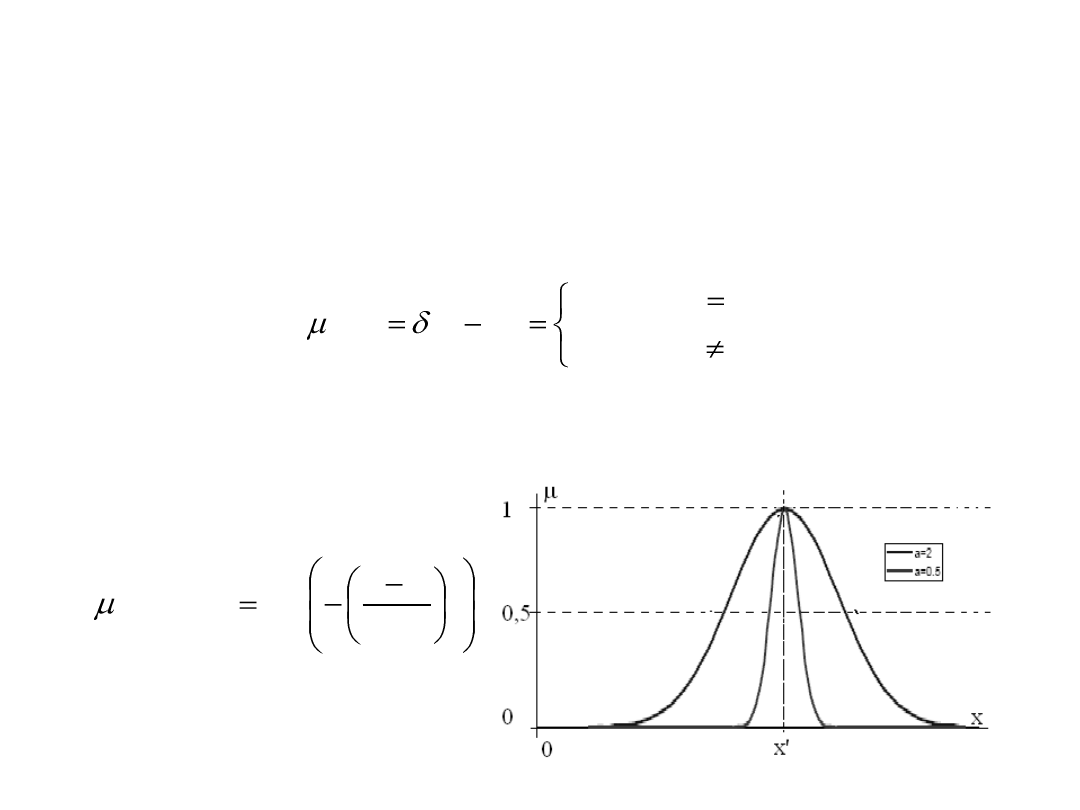
6. Funkcja przynależności klasy singleton:
'
dla
0
'
dla
1
)
'
(
)
(
x
x
x
x
x
x
x
A
7. Funkcja przynależności Gaussa:
2
'
exp
)
,
'
,
(
a
x
x
a
x
x
A
Definicje
Definicja
nośnika:
Zbiór elementów przestrzeni X, dla których μ
A
(x) > 0 nazywamy
nośnikiem zbioru rozmytego A i oznaczamy supp A (ang. support).
Zapisujemy
}
0
)
(
;
{
A
supp
x
x
A
X
Definicja
wysokości:
Wysokość zbioru rozmytego A oznaczamy h(A) i określamy jako
)
(
sup
)
A
(
x
h
A
A
x
Definicja zbioru rozmytego normalnego:
Zbiór rozmyty A nazywamy normalnym wtedy i tylko wtedy, gdy h(A) = 1.
Jeżeli zbiór rozmyty A nie jest normalny, to można go znormalizować za
pomocą przekształcenia
)
A
(
)
(
)
(
h
x
x
A
A
N
X
x

Definicje
Definicja zbioru rozmytego pustego:
Zbiór rozmyty A jest pusty, co zapisujemy A = Ø, wtedy i tylko wtedy, gdy
μ
A
(x
) = 0 dla każdego x
∈ X.
Definicja zawierania się zbiorów rozmytych:
Zbiór rozmyty A zawiera się w zbiorze rozmytym B, co zapisujemy A
⊂
B, wtedy i tylko wtedy, gdy
μ
A
(x)
≤ μ
B
(x
) dla każdego x
∈ X.
Definicja równości zbiorów rozmytych:
Zbiór rozmyty A jest równy zbiorowi rozmytemu B, co zapisujemy A = B,
wtedy i tylko wtedy, gdy
μ
A
(x) =
μ
B
(x
) dla każdego x
∈ X.
Właściwości zbiorów rozmytych
• Dla zbiorów rozmytych wprowadzono również pojęcia:
– Przekroju ,
– Wypukłości zbioru rozmytego (funkcji przynależności),
– Wklęsłości zbioru rozmytego.
x
μ
A
(x)
1
x
μ
A
(x)
Zbiór rozmyty wklęsły:
Zbiór rozmyty wypukły:

Operacje na zbiorach rozmytych
• Podstawowymi operacjami na zbiorach
rozmytych są:
– negacja (NOT)
– suma (OR)
– iloczyn (AND)
• W przypadku sumy i iloczynu logicznego mamy
parę możliwości uzyskania wyników. Do
obliczania ich zaproponowanych zostało kilka
wzorów matematycznych, różnych dla każdej z
tych operacji.
Definicja normy S
Funkcję dwóch zmiennych S
nazywamy S-
normą, jeżeli:
funkcja S
jest nierosnąca względem obu argumentów
S(a, c)
≤ S(b, d) dla a ≤ b c ≤ d
funkcja S
spełnia warunek przemienności
S(a, b) = S(b, a)
funkcja S
spełnia warunek łączności
S(S(a, b), c) = S(a, S(b, c))
funkcja S
spełnia warunki brzegowe
S(a, 0) = a, S(a, 1) = 1
gdzie a, b, c, d
∈ [0,1].
]
1
,
0
[
]
1
,
0
[
]
1
,
0
[
:
S
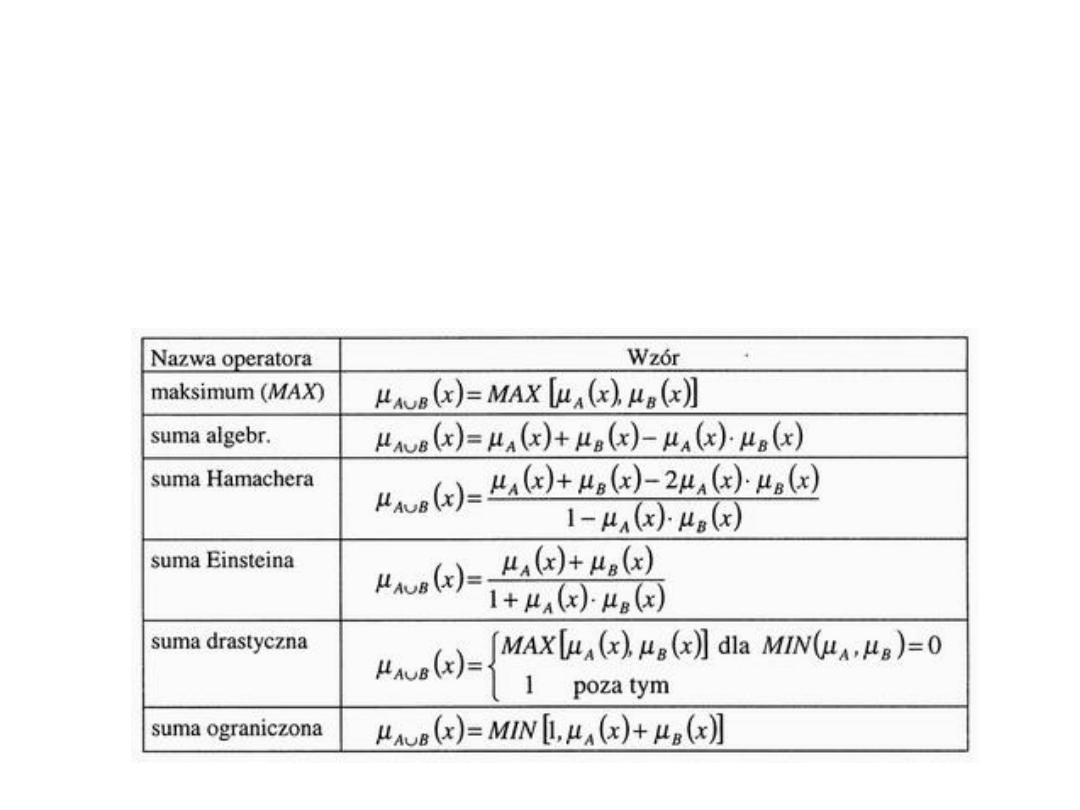
Suma logiczna zbiorów rozmytych
• Dla sumy logicznej zbiorów rozmytych stosowane
operatory S-normy,
Definicja normy T
Funkcję dwóch zmiennych T
nazywamy T-
normą, jeżeli:
funkcja T
jest nierosnąca względem obu argumentów
T(a, c)
≤ T(b, d) dla a ≤ b c ≤ d
funkcja T
spełnia warunek przemienności
T(a, b) = T(b, a)
funkcja T
spełnia warunek łączności
T(T(a, b), c) = T(a, T(b, c))
funkcja T
spełnia warunki brzegowe
T(a, 0) = 0, T(a, 1) = a
gdzie a, b, c, d
∈ [0,1].
]
1
,
0
[
]
1
,
0
[
]
1
,
0
[
:
T
Funkcja S
nosi także nazwę ko-normy lub normy dualnej względem
T-normy.
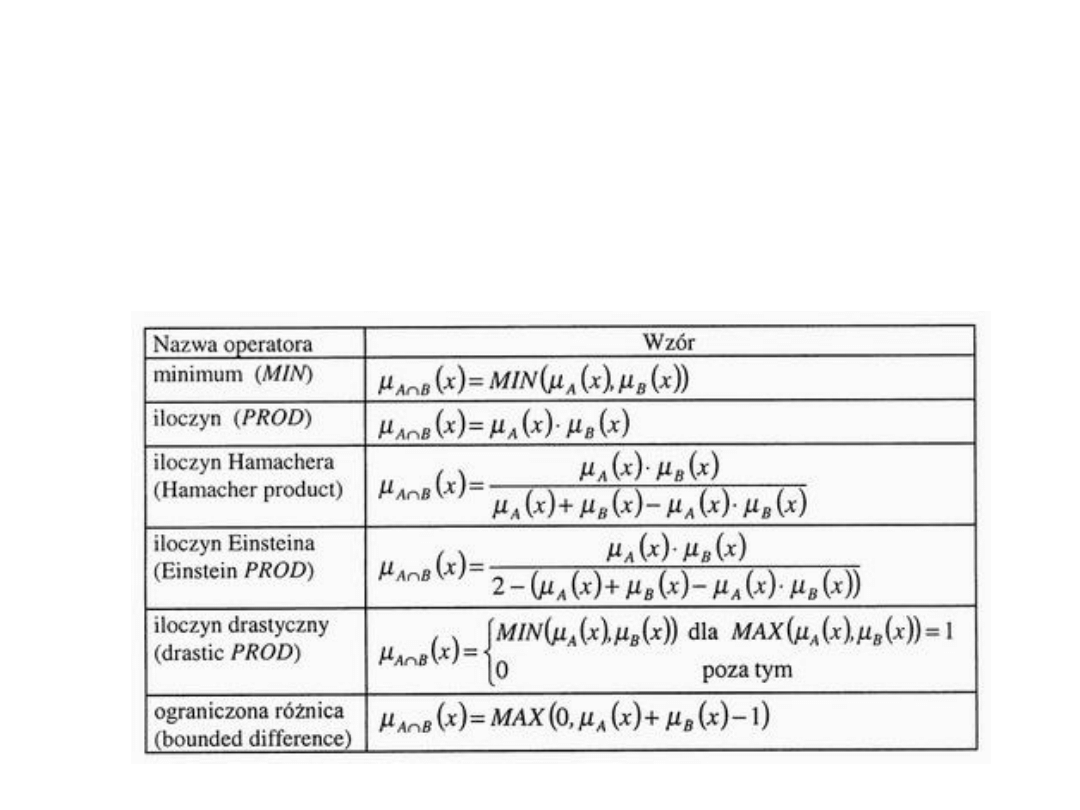
Iloczyn logiczny zbiorów rozmytych
• Dla iloczynu logicznego zbiorów rozmytych
stosowane są operatory T-normy

Negacja zbiorów rozmytych
• Negacja zbiorów rozmytych jest natomiast bardzo
zbliżona do negacji zwykłych zbiorów.
• W odróżnieniu od powyższych operacji istnieje tylko
jeden sposób otrzymywania wyniku.
• Aby go obliczyć wystarczy odjąć stopień
przynależności danego elementu od jedności.
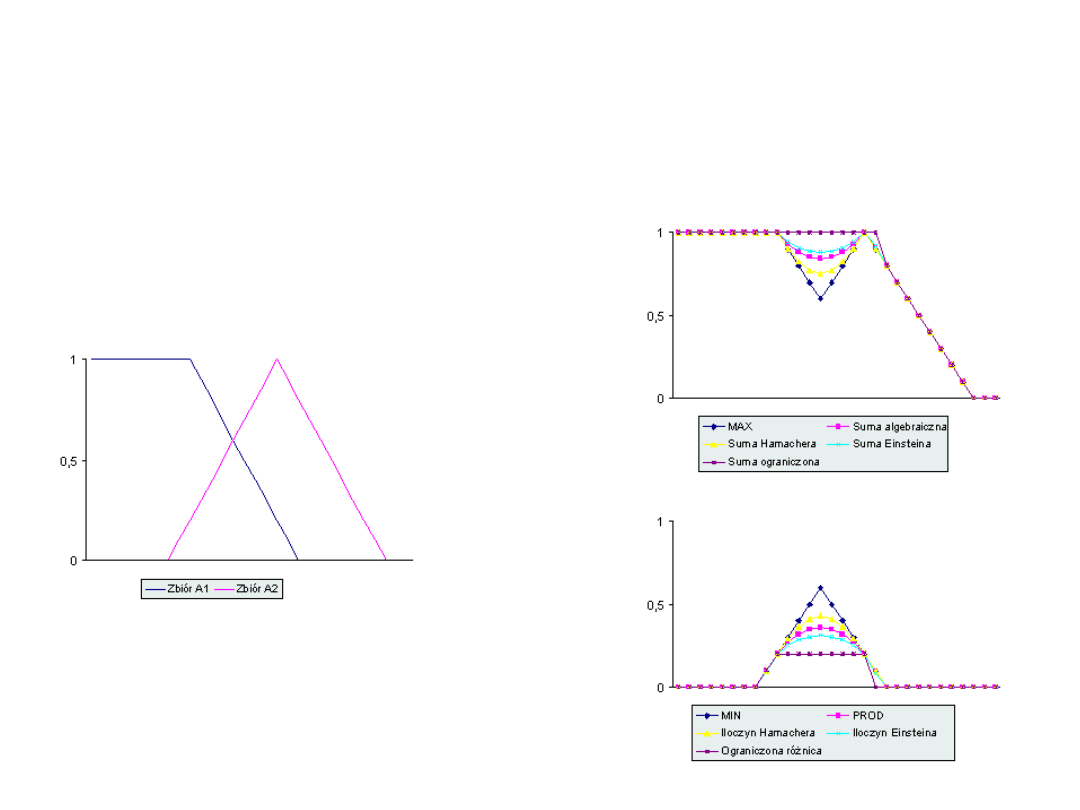
Ilustracje obliczeń sumy i iloczynu
logicznego
suma
iloczyn
Stosowanie operatorów
T-normy MIN, i S-normy MAX.
NEGACJA:
Jeżeli mamy dany podzbiór rozmyty A zbioru Y, to jego
negacją jest podzbiór Ā=Y-A. Czyli dla każdego y
należącego do A mamy Ā(y)=1-A(y)
Jeżeli A={ a/1;
b/0,4;
c/0,8;
d/0,2;
e/0 }
to Ā={ a/0;
b/0,6;
c/0,2;
d/0,8;
e/1 }
Przykład
SUMA
Jeżeli mamy dane podzbiory rozmyte A i B zbioru Y, to ich
sumą jest podzbiór C=A or B. Czyli dla każdego y
należącego do Y mamy C(y)=Max[A(y), B(y)]
A={
a/1;
b/0,3;
c/0,8;
d/0;
e/0,1 }
B={
a/0,6;
b/0,4;
c/0,9;
d/0,5;
e/0,7 }
C={
a/1;
b/0,4;
c/0,9;
d/0,5;
e/0,7 }
Przykład

ILOCZYN
Jeżeli mamy dane podzbiory rozmyte A i B zbioru Y, to ich
iloczynem jest podzbiór C=A and B. Czyli dla każdego y
należącego do Y mamy C(y)=Min[A(y), B(y)]
Przykład
A={
a/1;
b/0,3;
c/0,8;
d/0;
e/0,1 }
B={
a/0,6;
b/0,4;
c/0,9;
d/0,5;
e/0,7 }
C={
a/0,6;
b/0,3;
c/0,8;
d/0;
e/0,1 }
Przykład
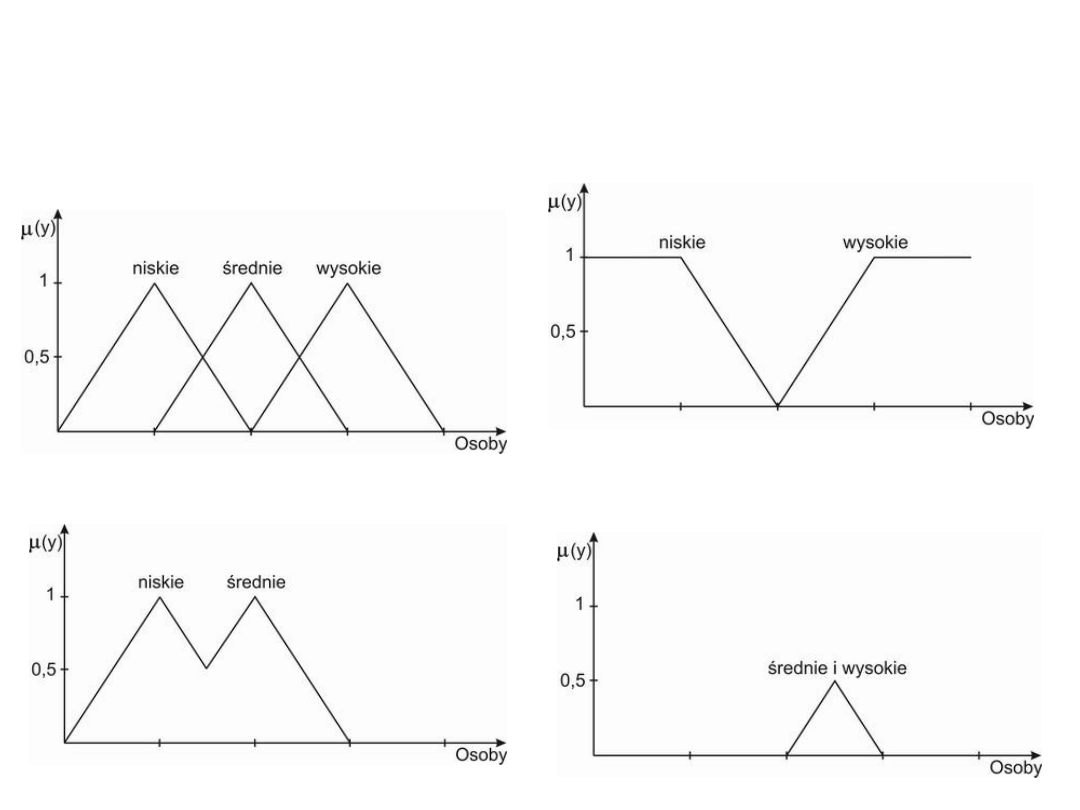
trzy podzbiory rozmyte
odpowiadające za wzrost
zbiór osób nie średnich
zbiór osób niskich lub średnich
zbiór osób zarówno średnich jaki i
wysokich

Przykład z dwoma zmiennymi
Z(y) = ( 0 wzrost < 170 cm
[Z(y) – 170]/20 170 cm > wzrost < 190 cm
1 wzrost > 190 cm )
V(y) = ( 0 wiek < 40 lat
[V(y) – 40]/20 40 lat >= wiek < 60 lat
1 wiek >= 60 lat )
Przykład z dwoma zmiennymi
Utwórzmy następujące zbiory rozmyte:
- zbiór ludzi wysokich lub starych
A = Z
LUB
V
- zbiór ludzi wysokich i starych
B = Z
I
V
Osoba Y
Wzrost
Wiek
Stopień
Przynależności
do Z
Stopień
Przynależności
do V
A
B
Darek
193
18
1
0
1
0
Kamil
139
53
0
0,82
0,82
0
Zbyszek
128
25
0
0,1
0,1
0
Sławek
182
74
0,6
1
1
0,6
Karol
175
35
0,25
0,36
0,36
0,25
Mariusz
179
48
0,45
0,69
0,69
0,45
Jacek
187
27
0,85
0,2
0,85
0,2
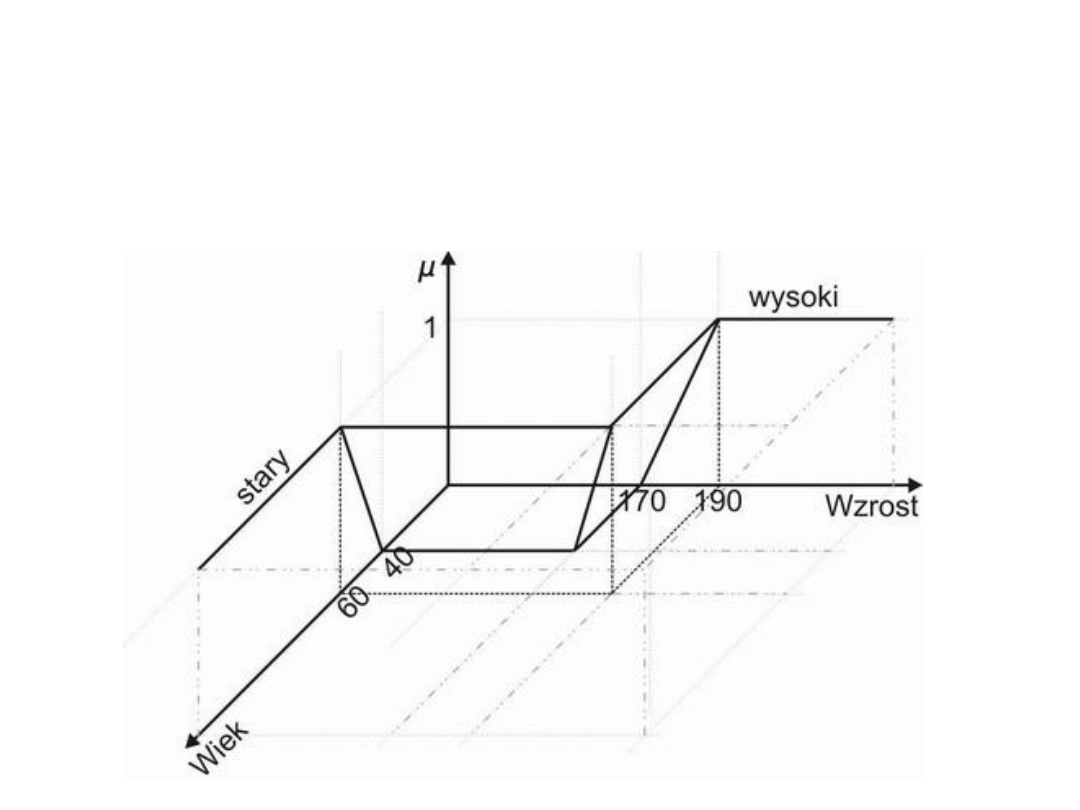
Interpretacja geometryczna
Graficzne prezentacja operacji (osoby_stare) LUB (osoby_wysokie):
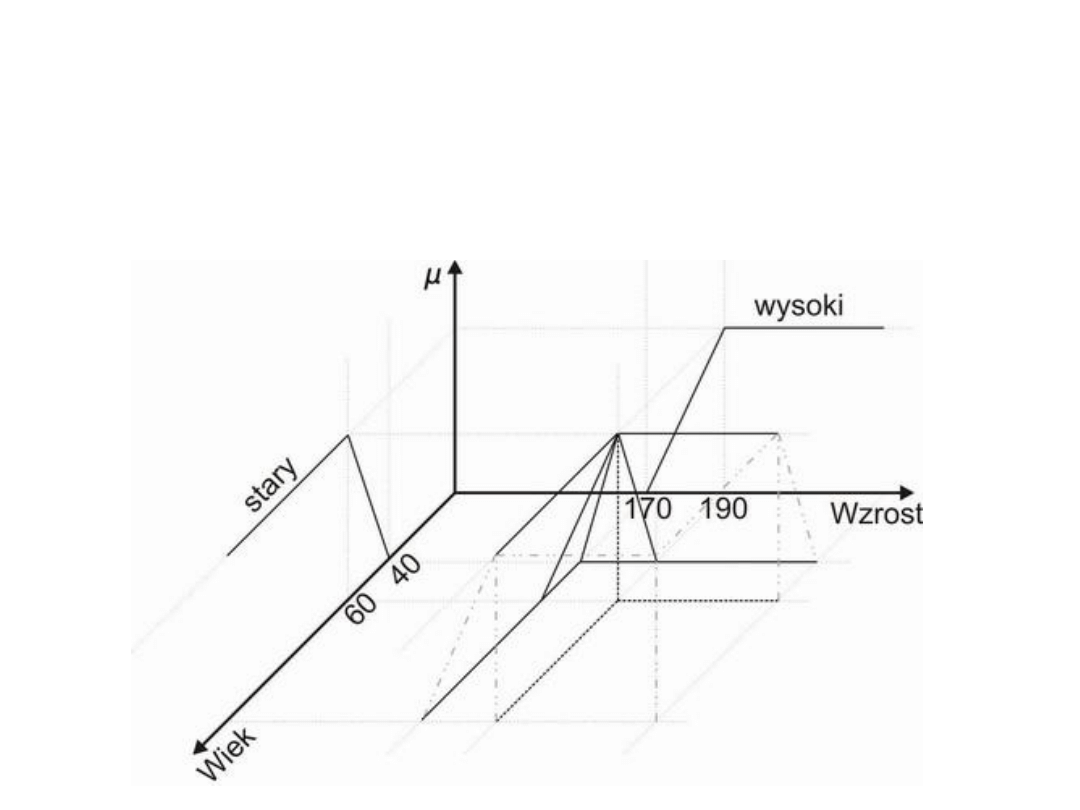
Interpretacja geometryczna
Graficzne prezentacja operacji (osoby_stare) I (osoby_wysokie):
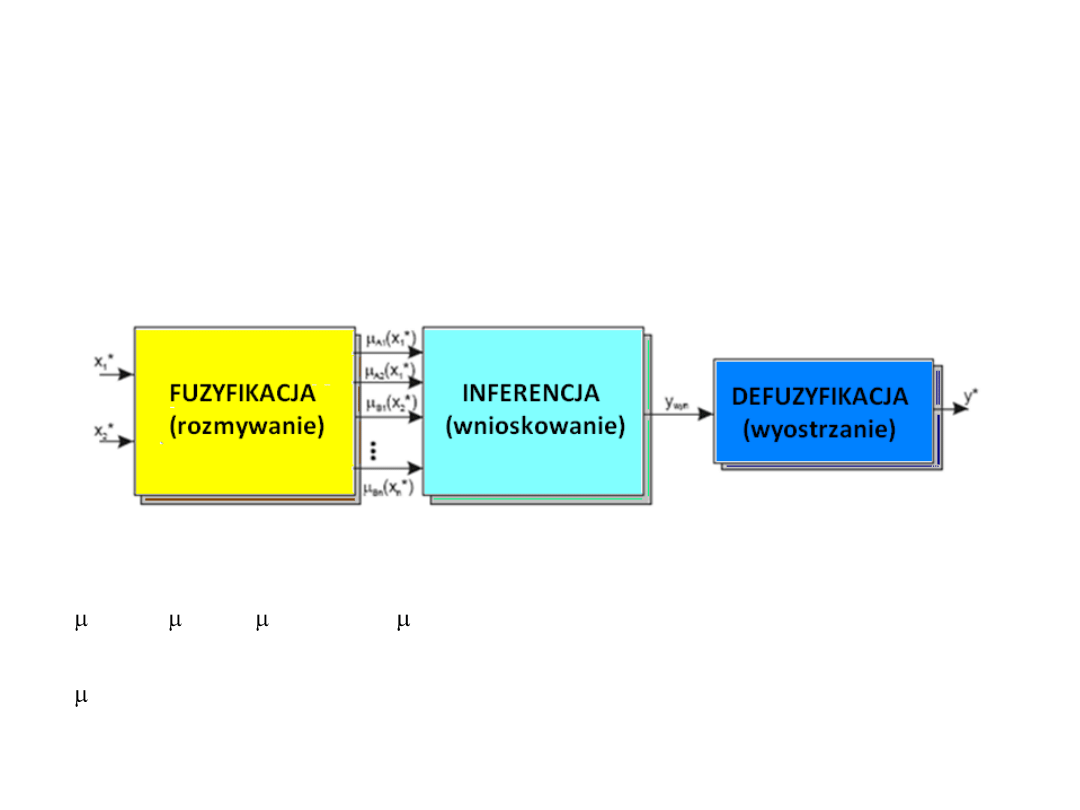
Regulatory rozmyte
Struktura przykładowego regulatora rozmytego o 2
wejściach i jednym wyjściu
X
1
*
, X
2
*
-
ostre wartości sygnałów wejściowych
A1
(X
1
*
),
A2
(X
1
*
)
B1
(X
2
*
), ... ,
Bn
(X
2
*
)
– stopnie przynależności ostrych wartości
wejściowych do odpowiednich wejściowych zbiorów rozmytych
wyn
(Y)
– wynikowa funkcja przynależności wyjścia
Y
*
-
ostra wartość sygnału wyjściowego
Fuzyfikacja
W bloku
FUZYFIKACJA
przeprowadzana jest operacja rozmywania czyli
obliczania stopnia przynależności do poszczególnych zbiorów rozmytych A
i
, B
j
wejść. Aby operację tę przeprowadzić blok
FUZYFIKACJA
musi posiadać
dokładnie zdefiniowane funkcje przynależności:
A
i
(x
1
)
,
B
j
(x
2
)
do zbiorów
rozmytych poszczególnych wejść.
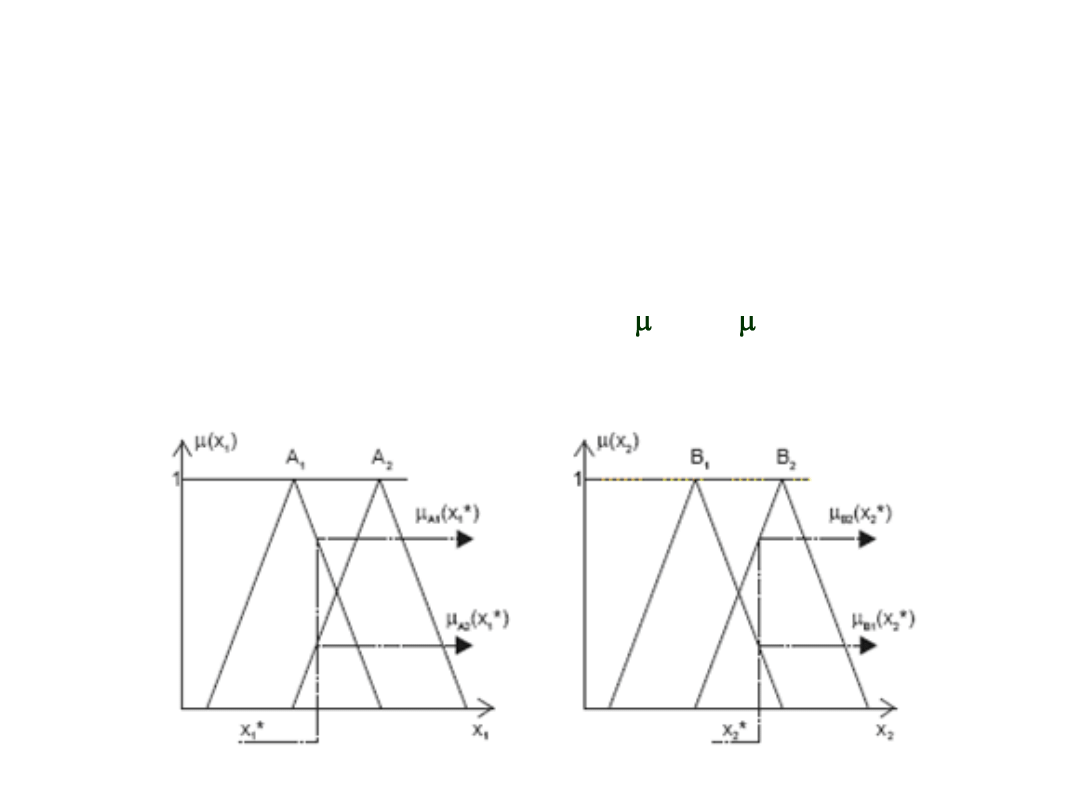
Fuzyfikacja c.d.
Obliczone i podane na wyjściu bloku FUZYFIKACJA
wartości stopni przynależności A
i
(x
1
*
), B
j
(x
2
*
) informują o
tym, jak wysoka jest przynależność ostrych wartości wejść
x
1
*
, x
2
*
do poszczególnych zbiorów rozmytych wejść, tzn. na
przykład jak bardzo wartości te są małe (A
1
, B
1
) lub duże (A
2
,
B
2
).
Inferencja
Blok INFERENCJA oblicza na podstawie wejściowych stopni
przynależności A
i
(x
1
), B
j
(x
2
) tzw. wynikową funkcję
przynależności
wyn
(y) wyjścia regulatora. Funkcja ta ma często
złożony kształt, a jej obliczanie odbywa się w drodze tzw.
Inferencji (wnioskowania), która może być matematycznie
zrealizowana na wiele sposobów. Aby przeprowadzić obliczenia
inferencyjne blok INFERENCJA musi zawierać następujące,
ściśle zdefiniowane elementy:
• bazę reguł,
• mechanizm inferencyjny,
• funkcje przynależności wyjścia y modelu.
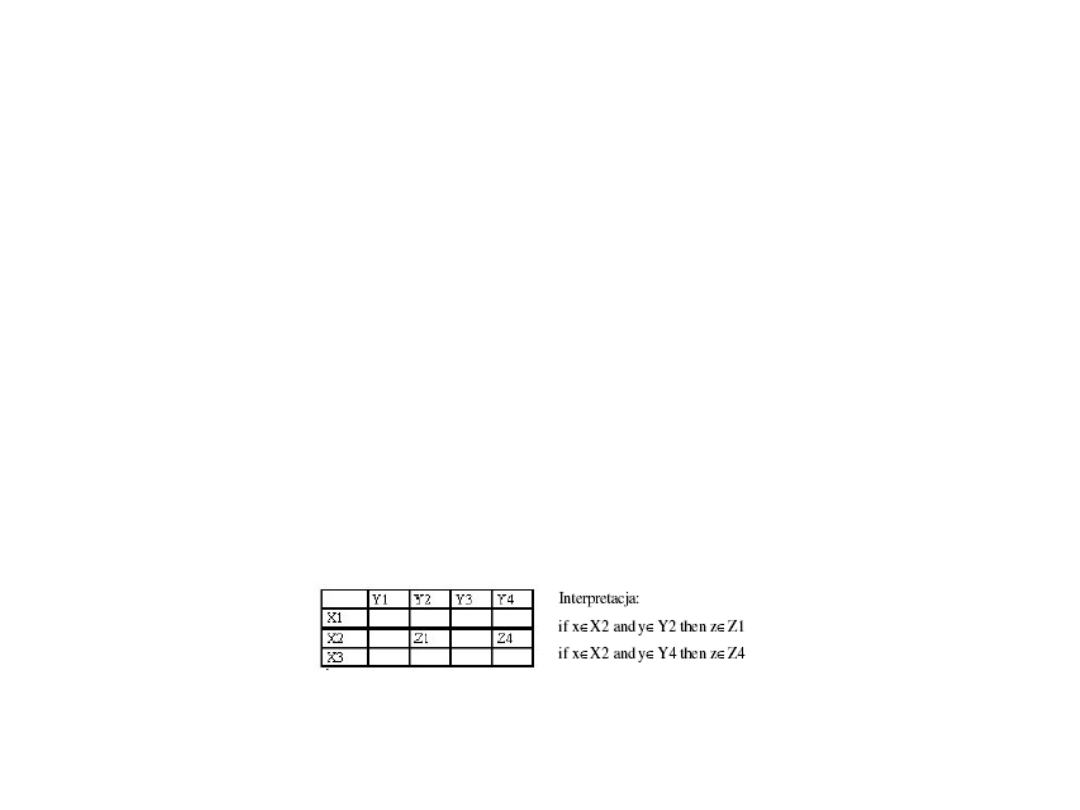
Inferencja c.d.
Baza reguł zawiera reguły logiczne określające zależności
przyczynowo-skutkowe istniejące w systemie pomiędzy
zbiorami rozmytymi wejść i wyjść.
Reguła:
JEŚLI
przesłanki
TO
konkluzja
Przesłanki mają zwykle postać funkcji logicznej.
Przykładowa baza reguł może mieć następującą postać:
reguła 1:
JEŚLI
(X
1
A
1
)
I
(X
2
B
1
)
TO
(Y C
1
)
reguła 2:
JEŚLI
(X
1
A
2
)
I
(X
2
B
1
)
TO
(Y C
2
)
reguła 1:
JEŚLI
(X
1
A
1
)
LUB
(X
2
B
2
)
TO
(Y C
2
)
przesłanki
operator
konkluzja
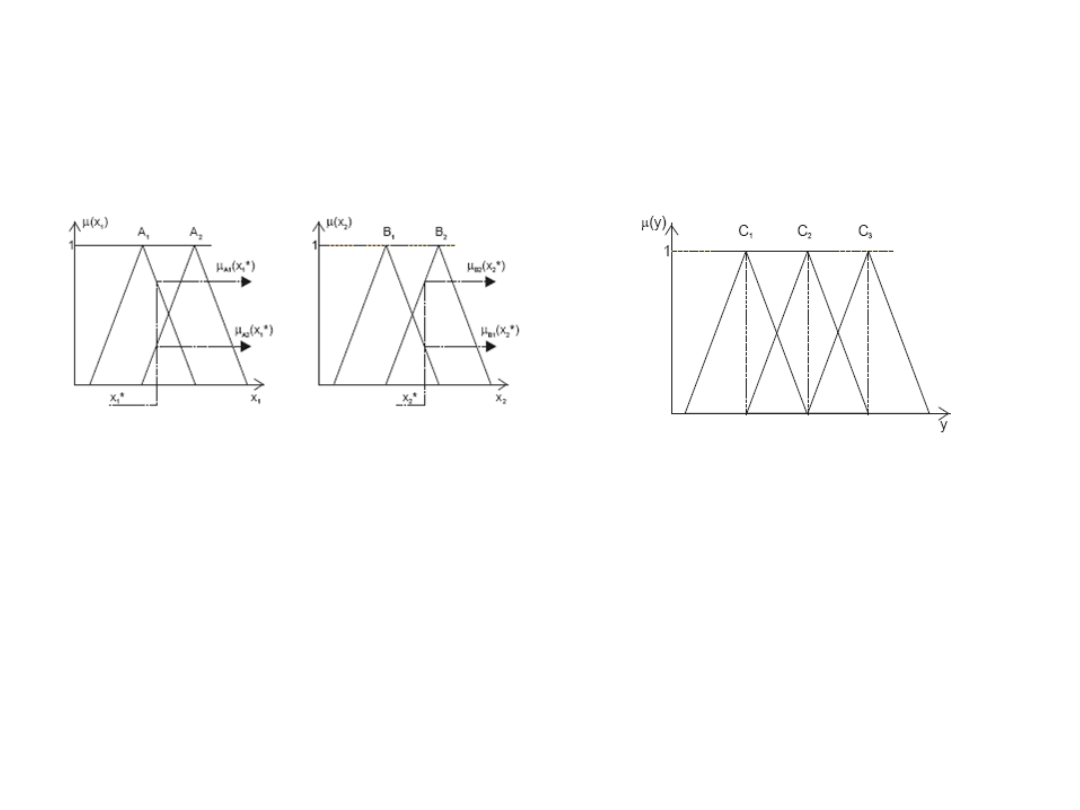
Inferencja - przykład
Mechanizm inferencyjny realizuje zadanie bloku INFERENCJA, tzn.
obliczanie wynikowej funkcji przynależności mwyn(y). Składa się on z
następujących części:
– Części, która na podstawie stopni spełnienia przesłanek poszczególnych reguł z
uwzględnieniem wykorzystywanych w nich operatorów (I albo LUB) oblicza
stopień aktywizacji konkluzji reguł.
– Części określającej wynikową postać funkcji przynależności wyjścia mwyn(y)
na podstawie stopni aktywizacji konkluzji poszczególnych reguł.
Przykładowe zbiory rozmyte wejść (A1
– mały, A2 – duży)
zbiory rozmyte wyjścia (C1 –
mały, C2 – średni, C3 – duży)
DEFUZYFIKACJA
Mając daną funkcję przynależności wyjścia mwyn(y) regulator
może obliczyć ostrą wartość wyjściową y*. Operację tę realizuje
blok DEFUZYFIKACJA.
Przez defuzyfikację zbioru rozmytego scharakteryzowanego
wyjściową funkcją przynależności
wyn
(y) uzyskaną w wyniku
inferencji należy rozumieć operację określania ostrej wartości
y*, reprezentującej ten zbiór w sposób jak najbardziej
"sensowny".

DEFUZYFIKACJA c.d.
Oczywiście mogą istnieć różne kryteria oceny sensowności
reprezentanta y* zbioru rozmytego. O ilości tych kryteriów
świadczy ilość metod defuzyfikacji, z których najbardziej
znane to:
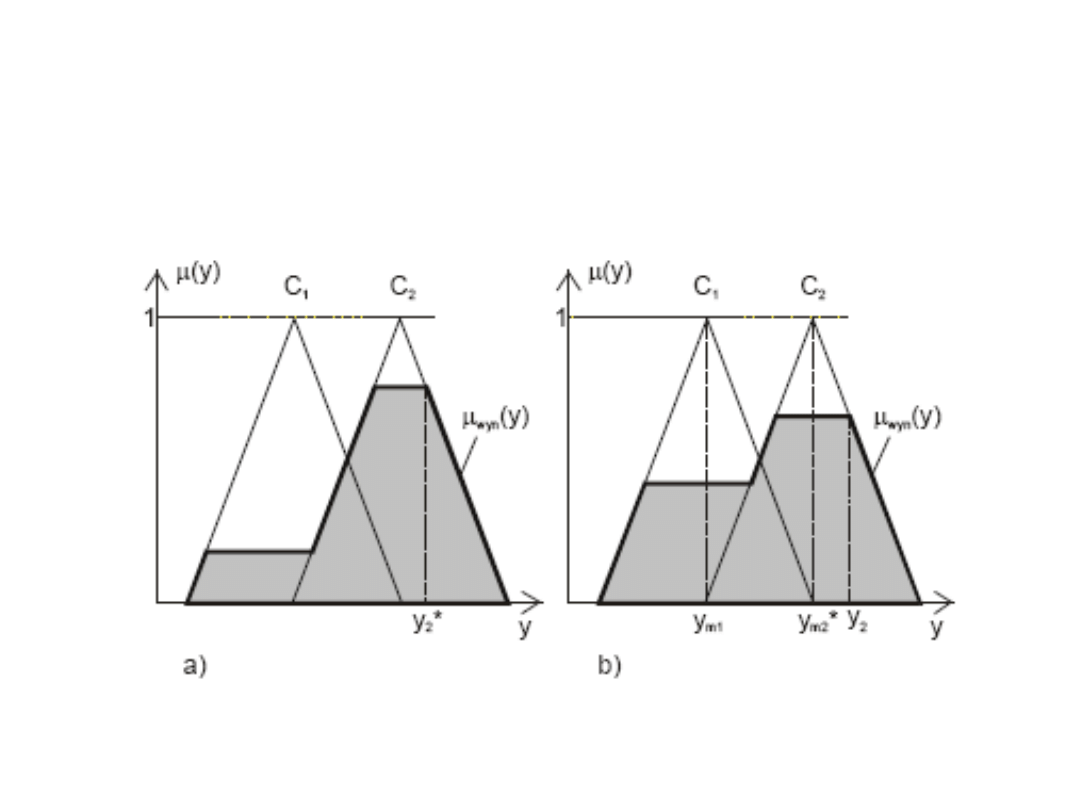
• Metoda środka maksimum (Middle of Maxima)
• Metoda pierwszego maksimum (First of Maxima)
• Metoda ostatniego maksimum (Last of Maxima)
• Metoda środka ciężkości (Center of Gravity)
• Metoda wysokości (Height Method)
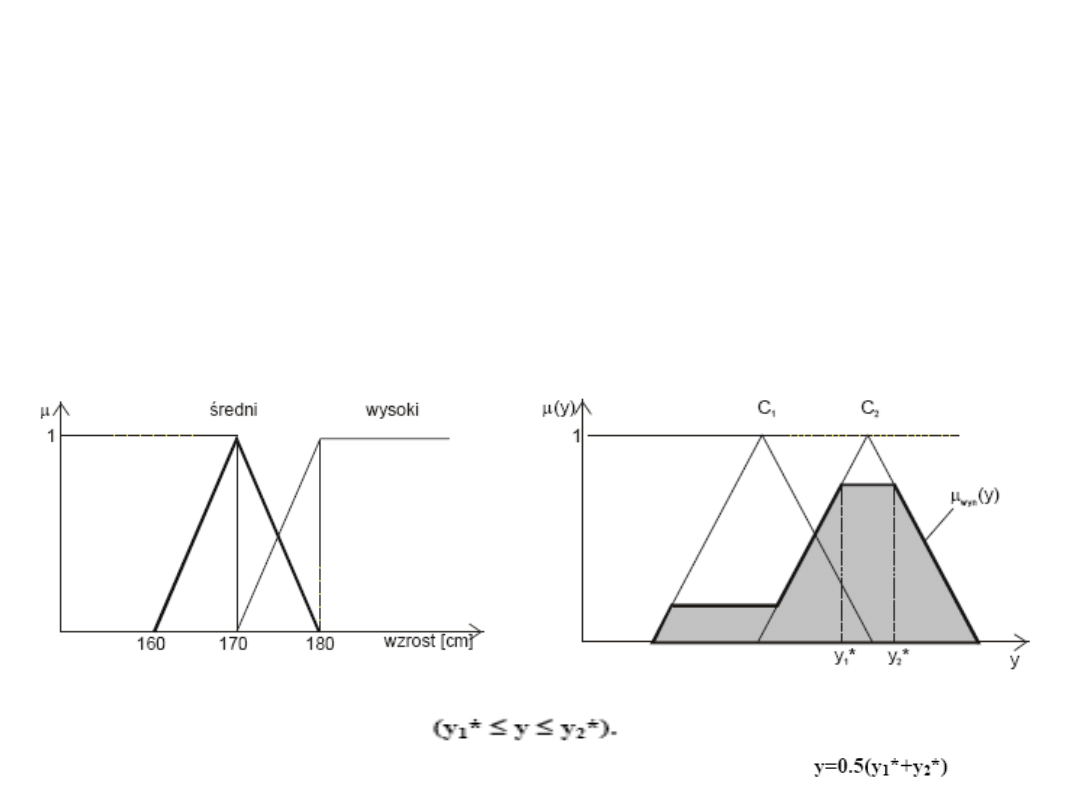
Metoda środka maksimum
Funkcję przynależności do zbioru rozmytego można rozumieć jako funkcję
informującą o podobieństwie poszczególnych elementów zbioru do elementu
najbardziej typowego dla tego zbioru.
Przykład
Wynikowa funkcja przynależności z nieskończoną ilością elementów y o najwyższej
przynależności
Metoda środka maksimum
• Zaletą metody jest prostota obliczeniowa ułatwiająca
zastosowanie tańszych elementów w układzie sterowania.
Prostota obliczeniowa okupiona jest jednak pewnymi wadami.
• Wadą metody jest to, że na wynik metody wpływa tylko ten
zbiór rozmyty, który jest najbardziej zaktywizowany. Zbiory
mniej zaktywizowane nie mają wpływu. Oznacza to również,
że na wynik w postaci ostrej wartości wyjściowej y* mają
wpływ tylko te reguły bazy reguł, które mają ten zbiór w
swojej konkluzji (często jest to tylko jedna reguła). W ten
sposób defuzyfikacja staje się "niedemokratyczna", bowiem
nie wszystkie reguły biorą udział w "głosowaniu".
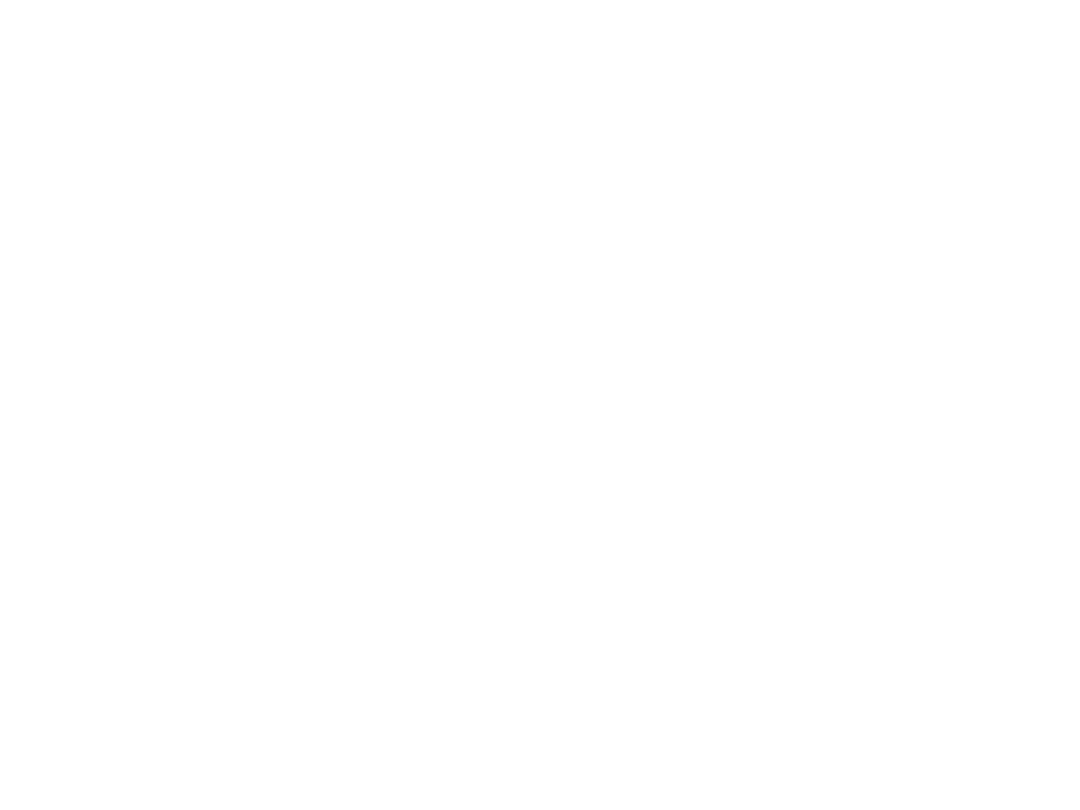
Metoda środka maksimum c.d.
Czułość metody defuzyfikacji i wynikająca stąd czułość regulatora rozmytego
można zdefiniować jako istnienie reakcji wyjścia Dy regulatora na zmiany stopni
aktywizacji zbiorów rozmytych konkluzji reguł.
Ilustracja wad metody środka maksimum (SM).
Metoda pierwszego maksimum
Zalety metody pierwszego maksimum:
· mały nakład obliczeniowy,
· większa (względem metody średniego maksimum) czułość na zmiany stopnia
aktywizacji konkluzji reguł.
Wady metody pierwszego maksimum:
· nieciągłość,
· uwzględnianie w procesie defuzyfikacji tylko jednego, najbardziej
zaktywizowanego
zbioru.
Metoda ostatniego maksimum
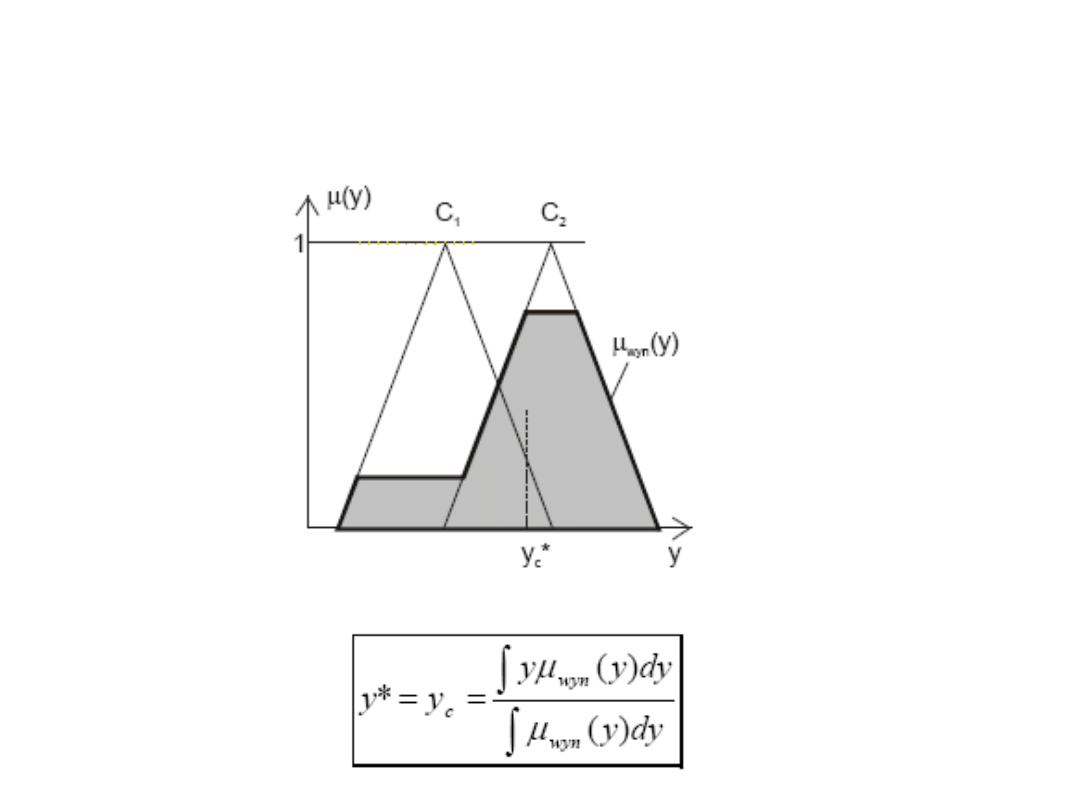
Metoda środka ciężkości

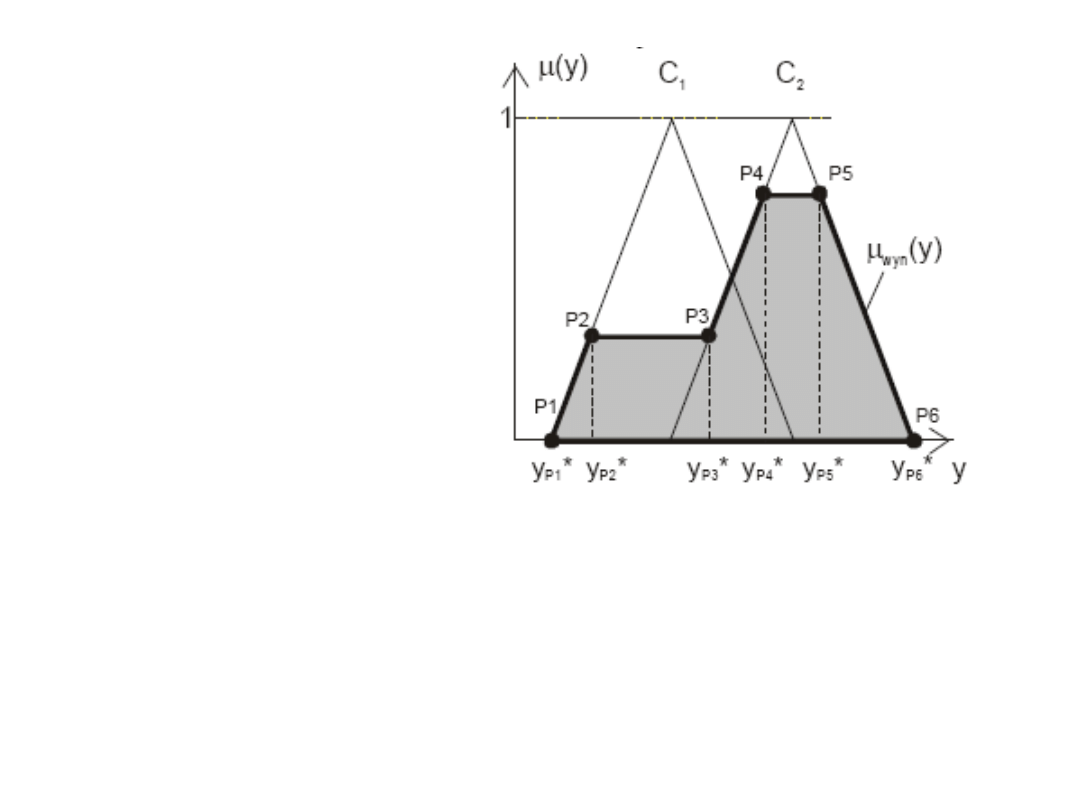
Uproszczenie metody
Uproszczenie polega na:
• zastąpieniu znaku całkowania z licznika wzoru na ostrą
wartość wyjściową znakiem sumy.
• przy sumowaniu uwzględniamy po kolei punkty
charakterystyczne wynikowej funkcji przynależności, tak jak
to przedstawia rysunek
Zalety metody środka ciężkości:
Wszystkie zaktywizowane funkcje przynależności konkluzji
(wszystkie aktywne reguły) biorą udział w procesie defuzyfikacji.
Jest ona "demokratyczna". Gwarantuje to większą niż w
przypadku poprzednio przedstawionych reguł czułość regulatora
rozmytego na zmiany jego wejść.
Metoda środka
ciężkości

Metoda środka ciężkości
Wady metody środka ciężkości
· Duża ilość skomplikowanych obliczeń, co jest związane z
całkowaniem powierzchni o nieregularnym kształcie. Istnieje
kilka metod upraszczania obliczeń dla metody środka
ciężkości, jak na przykład użycie prostokątnych funkcji
przynależności.
· Zawężenie zakresu defuzyfikacji
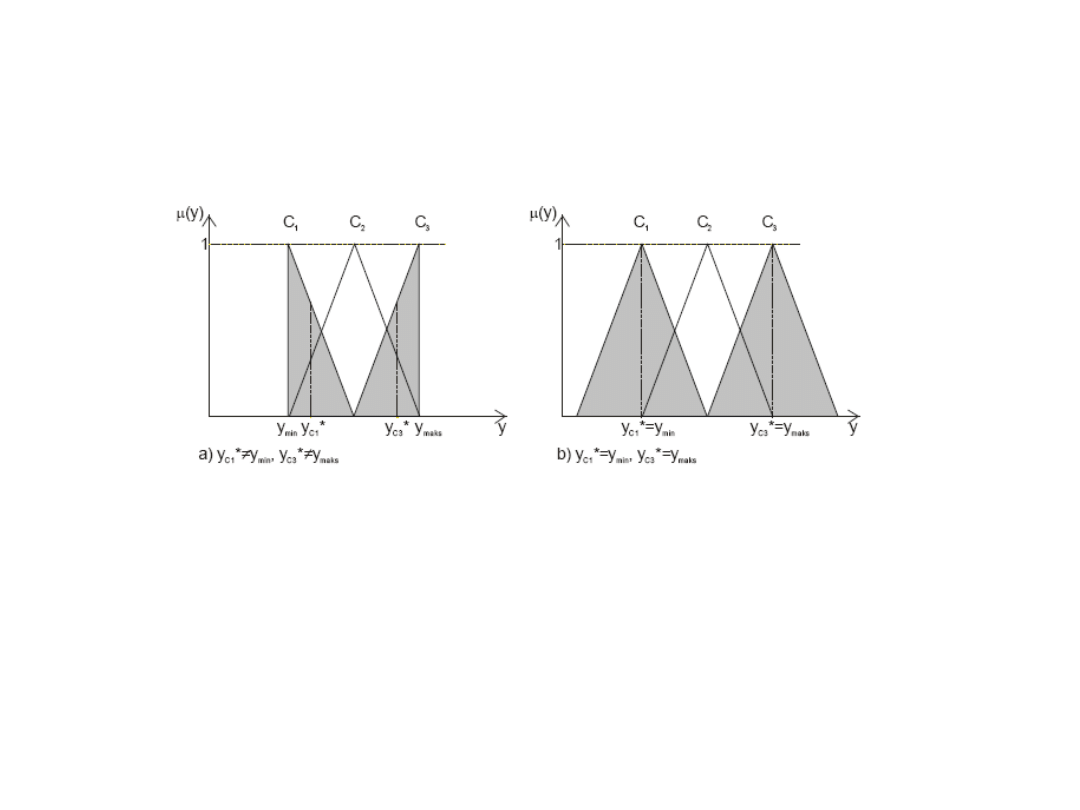
Metoda środka ciężkości -
modyfikacja
Wyjście y modelu (regulatora) rozmytego nie może osiągnąć minimalnej
(maksymalnej) wartości możliwego zakresu nastaw. Regulator nie mógłby więc
wygenerować większych sygnałów sterujących, co obniżyłoby jakość regulacji.
Wadę tę można usunąć przez rozszerzenie brzegowych zbiorów rozmytych (Patrz
rysunek b.), dzięki czemu współrzędne środka ciężkości tych zbiorów pokrywają
się z granicami zakresu działania ymin, ymax.
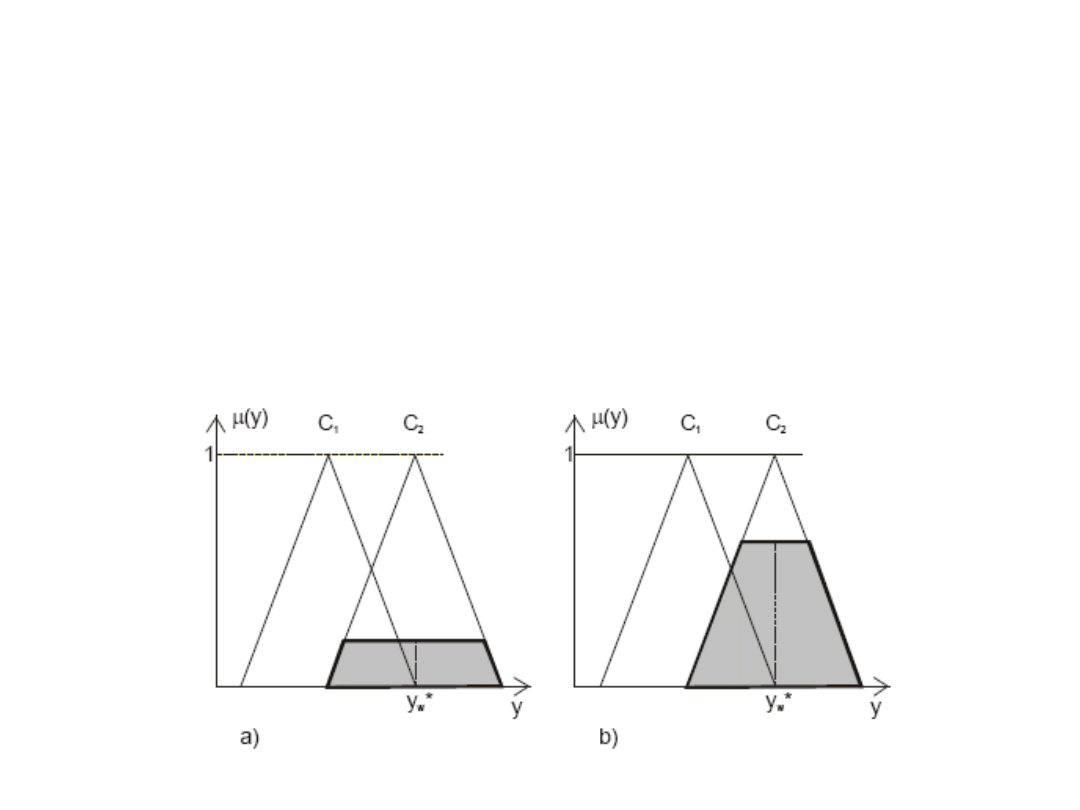
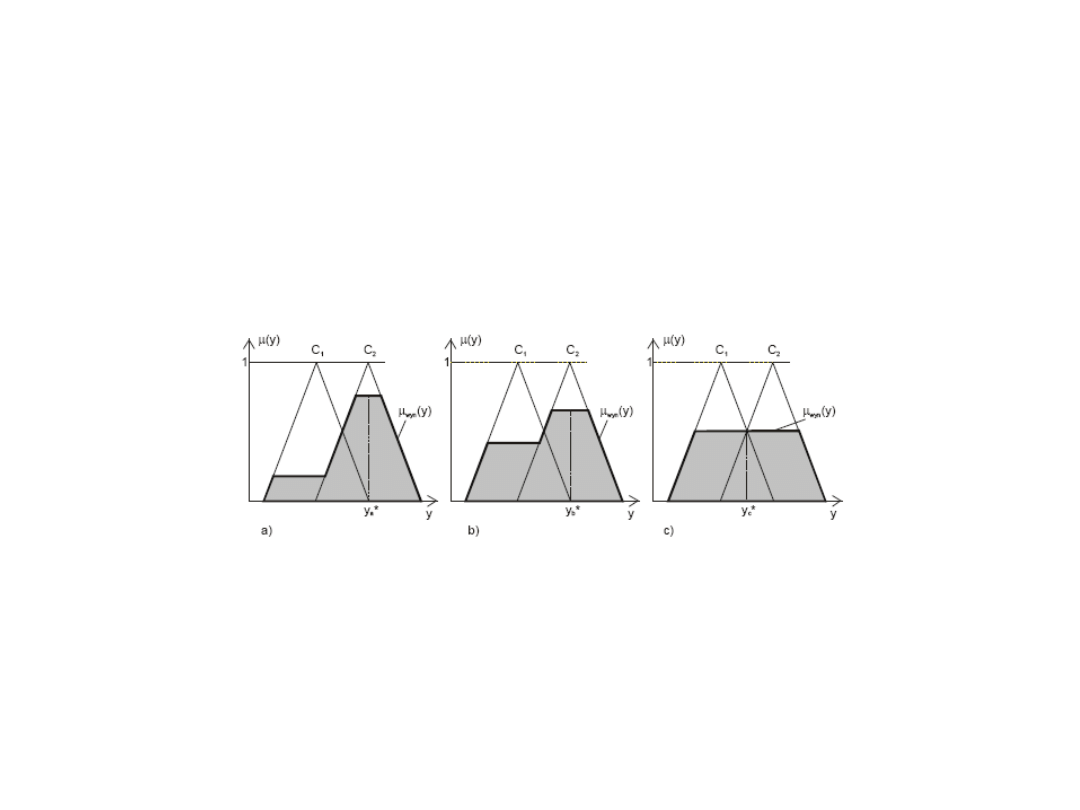
Metoda środka ciężkości – wady c.d.
• Nieczułość metody w przypadku aktywizacji tylko jednej funkcji przynależności
wyjścia. Jeżeli kilka reguł ma identyczną konkluzję lub aktywizowana jest tylko
jedna reguła (patrz rysunek), to mimo zmiany stopnia aktywizacji zbioru
wynikowego, współrzędna środka ciężkości yw nie zmienia się. Oznacza to
nieczułość metody na zmiany wejścia.
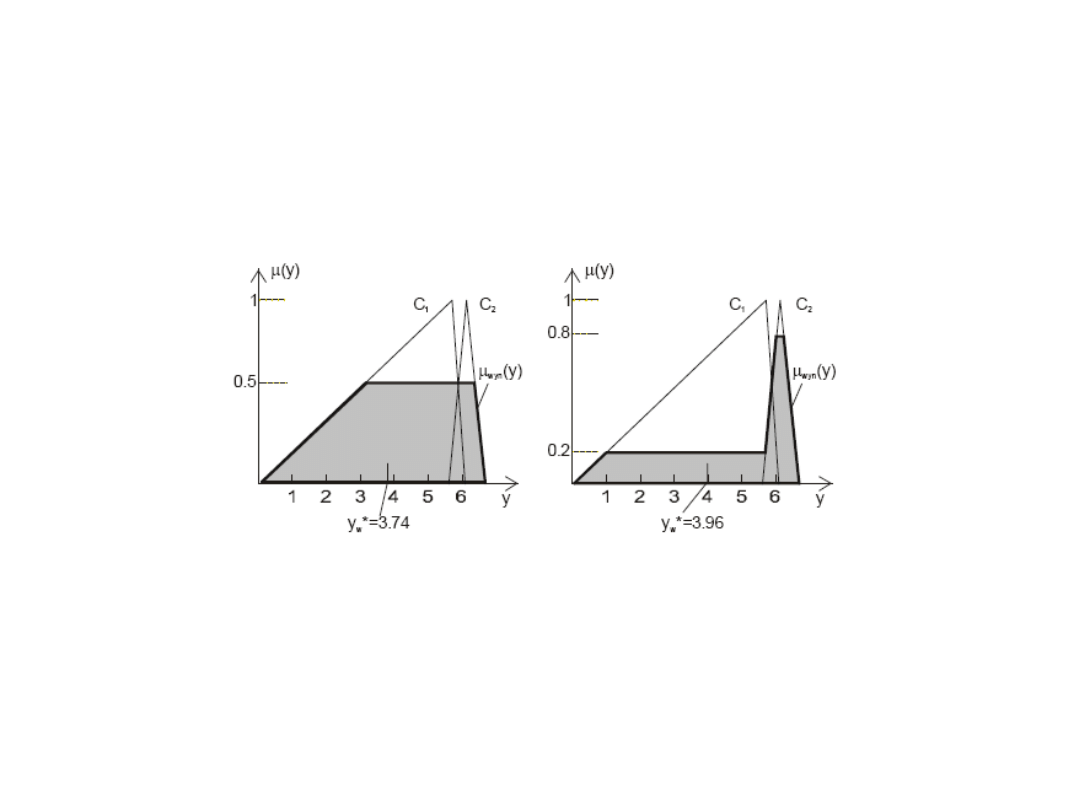
Metoda środka ciężkości – wady c.d.
Zmniejszenie czułości metody środka ciężkości przy dużym zróżnicowaniu
wielkości nośników zbiorów wyjściowych.
Duża zmiana stopnia aktywacji zbiorów składowych (ma: 0.5 – 0.2, mb: 0.5 – 0.8)
powoduje minimalne przesunięcie współrzędnej środka ciężkości (y*=yc: 3.74 –
3.96). Powodem tego jest duże zróżnicowanie powierzchni zbiorów składowych C1
i C2. Aby uzyskać większy wpływ zmiany stopni aktywizacji ma(y) i mb(y) na
zmianę wartości yc nośniki obu zbiorów powinny być podobne. Warunkiem
wysokiej czułości metody jest więc małe zróżnicowanie wielkości poszczególnych
zbiorów wynikowych reguł.
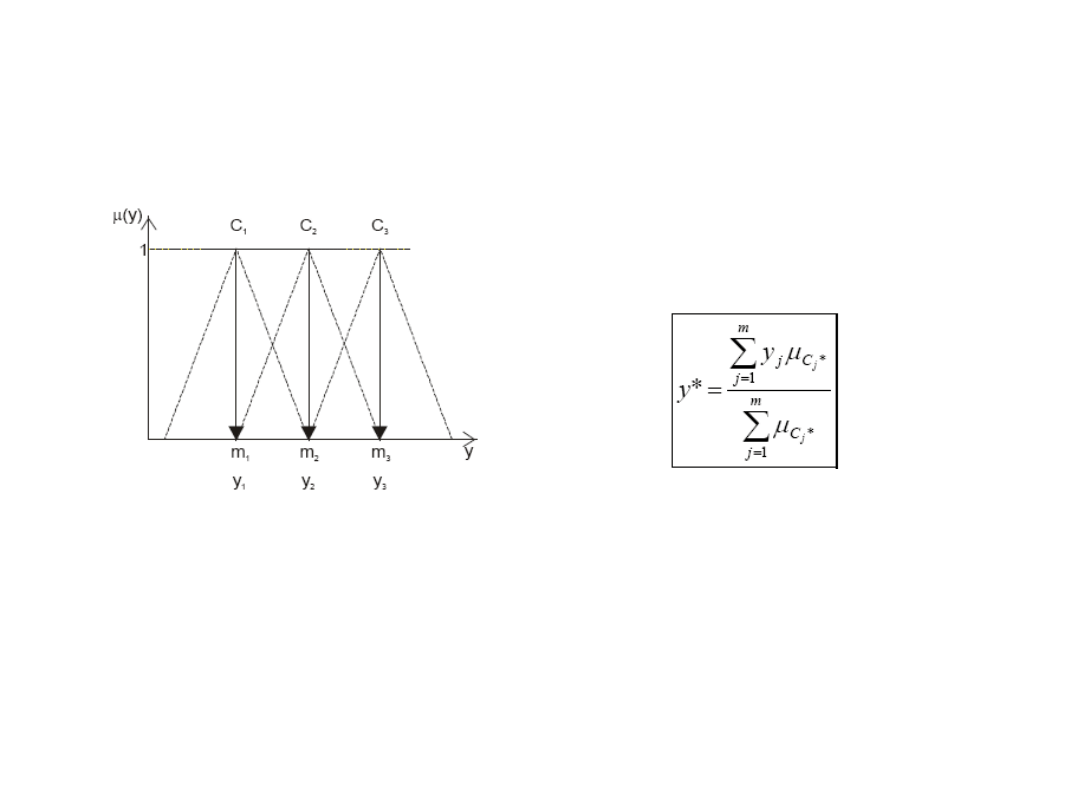
Metoda wysokości
Zastępowanie zbiorów rozmytych zbiorami jednoelementowymi.
Do obliczania wyjścia modelu y* (wyniku
defuzyfikacji) stosujemy wzór:
Zalety metody wysokości:
• znaczne zmniejszenie ilości obliczeń w porównaniu z metodą środka ciężkości,
• ciągłość,
• duża czułość.

Zastosowanie regulatora rozmytego
do sterowania suwnicą
przenoszącą kontenery
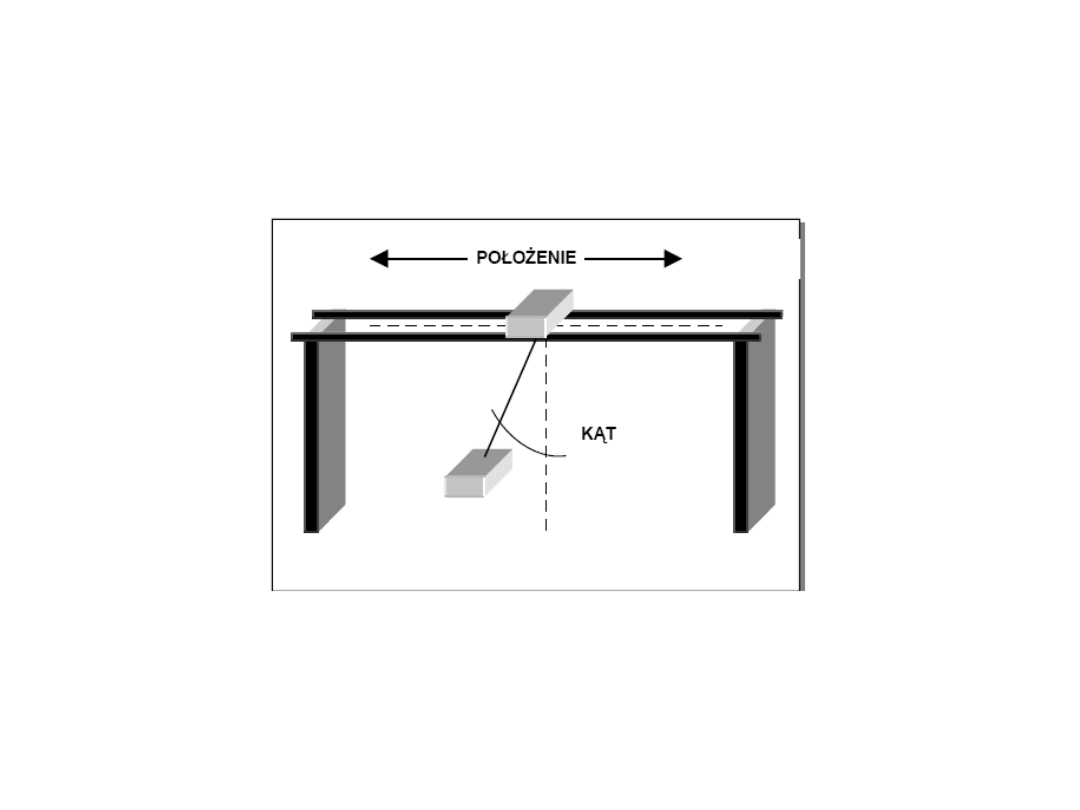
Model suwnicy
Sygnały wejściowe wykorzystywane w procesie sterowania to:
d
– odległość wózka z kontenerem od zadanej pozycji docelowej,
Q -
kąt wychylenia liny z kontenerem od pionu.

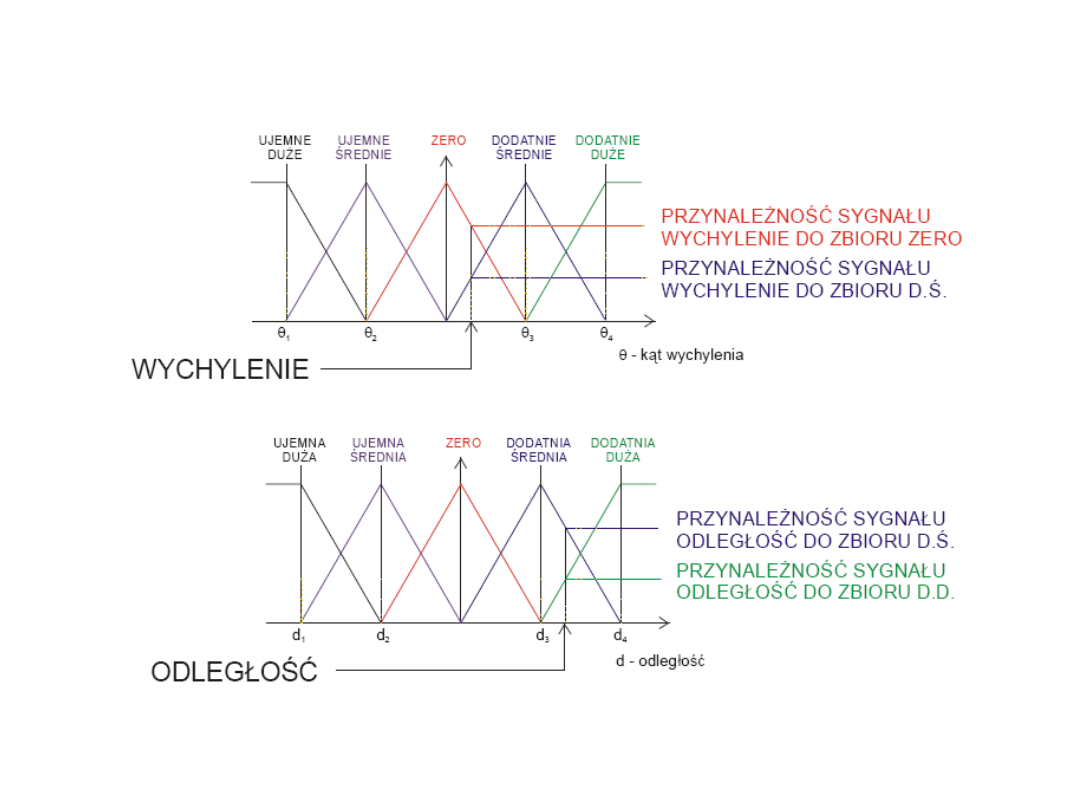
Fuzyfikacja
Jak zostało to opisane w części teoretycznej fuzyfikacja jest procesem rozmywania
ostrych wartości wejściowych czyli określania ich stopnia przynależności do
właściwych zbiorów rozmytych wejścia. W przypadku modelu suwnicy mamy do
czynienia z następującymi wejściowymi zbiorami rozmytymi:
• dla sygnału "odległość od miejsca docelowego" zbiory:
UJEMNA DUŻA,
UJEMNA MAŁA, ZERO, DODATNIA DUŻA, DODATNIA MAŁA
,
• dla sygnału "kąt wychylenia" zbiory:
UJEMNY DUŻY, UJEMNY MAŁY, ZERO,
DODATNI MAŁY, DODATNI DUŻY
.

Inferencja
Zadaniem bloku INFERENCJA jest zbudowanie tzw. wynikowej funkcji
przynależności mwyn(y) wyjścia regulatora.
Właściwe sterownie mają nam zapewnić odpowiednio dobrane reguły:
R1: JEŚLI (d = duża) TO (P = duża)
R2: JEŚLI (d = mała) I (kąt = ujemny duży) TO (P = dodatnia średnia)
R3: JEŚLI (d = mała) I (kąt = ujemny mały LUB zero LUB dodatni mały) TO (P =
dodatnia średnia)
R4: JEŚLI (d = mała) I (kąt = dodatni duży) TO (P = ujemna średnia)
R5: JEŚLI (d = zero) I (kąt = dodatni duży LUB mały) TO (P = ujemna średnia)
R6: JEŚLI (d = zero) I (kąt = zero) TO (P = zero)
R7: JEŚLI (d = zero) I (kąt = ujemny mały) TO (P = dodatnia średnia)
R8: JEŚLI (d = zero) I (kąt = ujemny duży) TO (P = dodatnia duża)
gdzie: d
– odległość od celu, P – moc
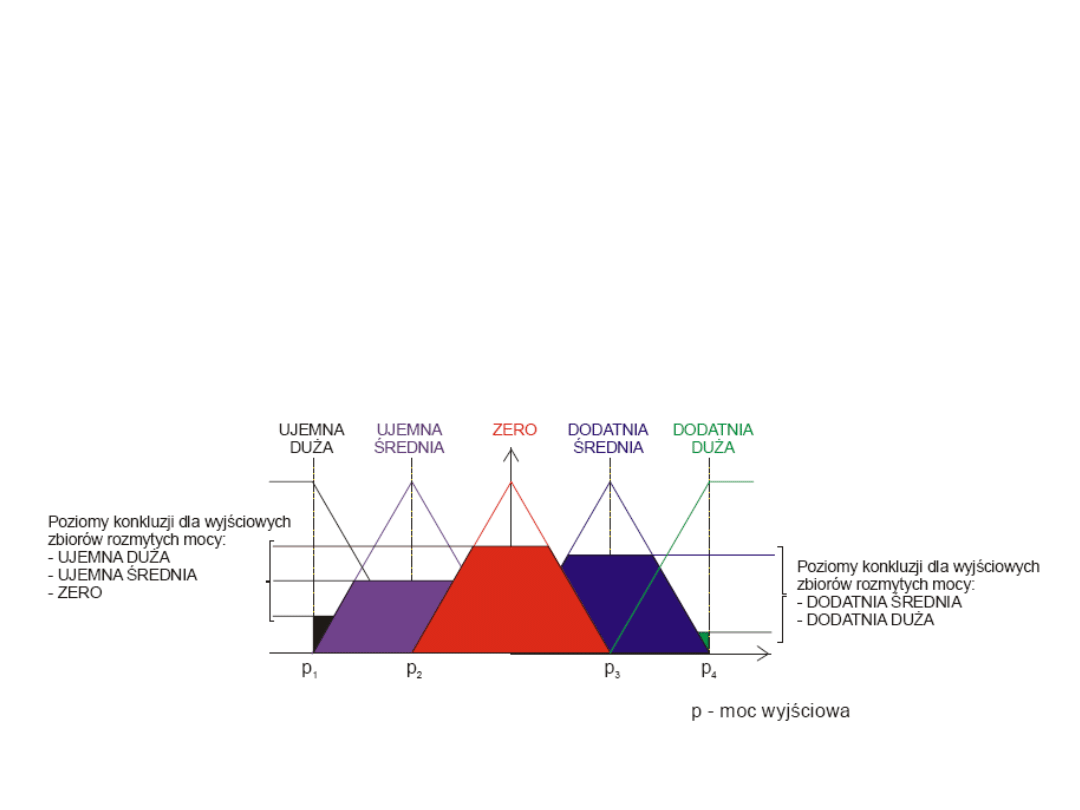
Ilustracja wyznaczania wynikowej funkcji
przynależności na podstawie wyliczonych
przez bazę reguł stopni aktywacji konkluzji
poszczególnych reguł oraz wyjściowych zbiorów
rozmytych.
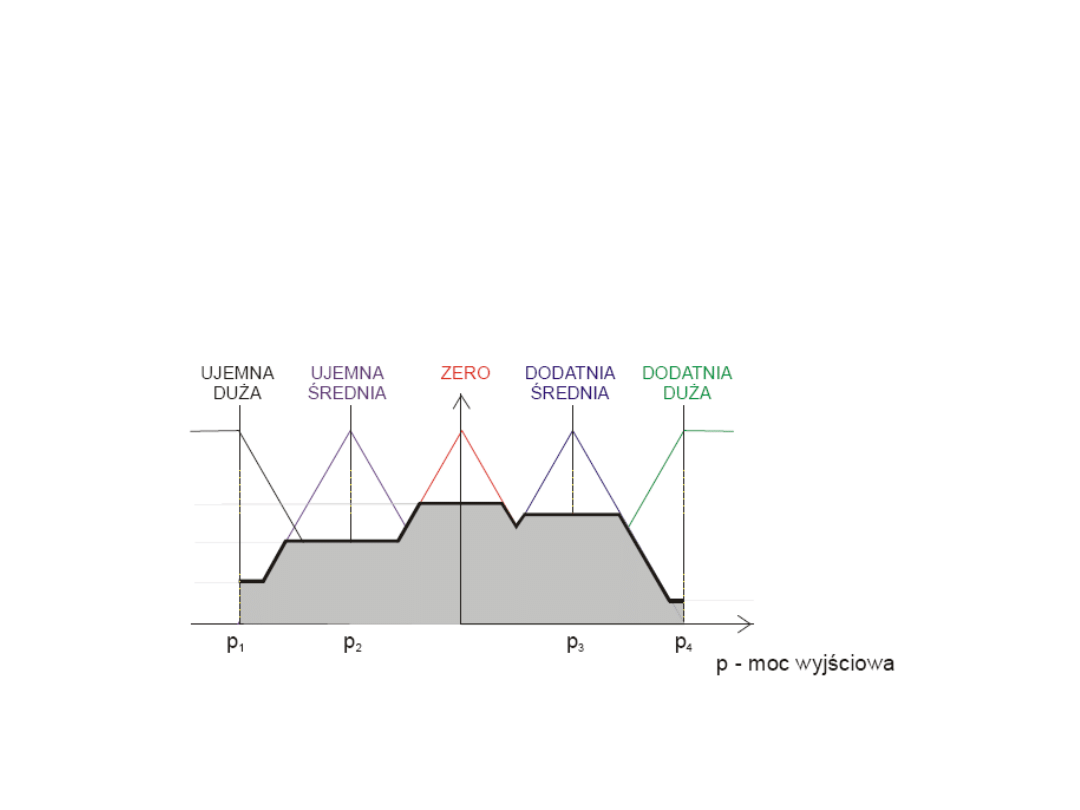
Ostateczny kształt wynikowej
funkcji przynależności m
wyn
(y)

Zastosowanie sieci neuronowych
w zbiorach rozmytych
Sieci neuronowe rozmyte
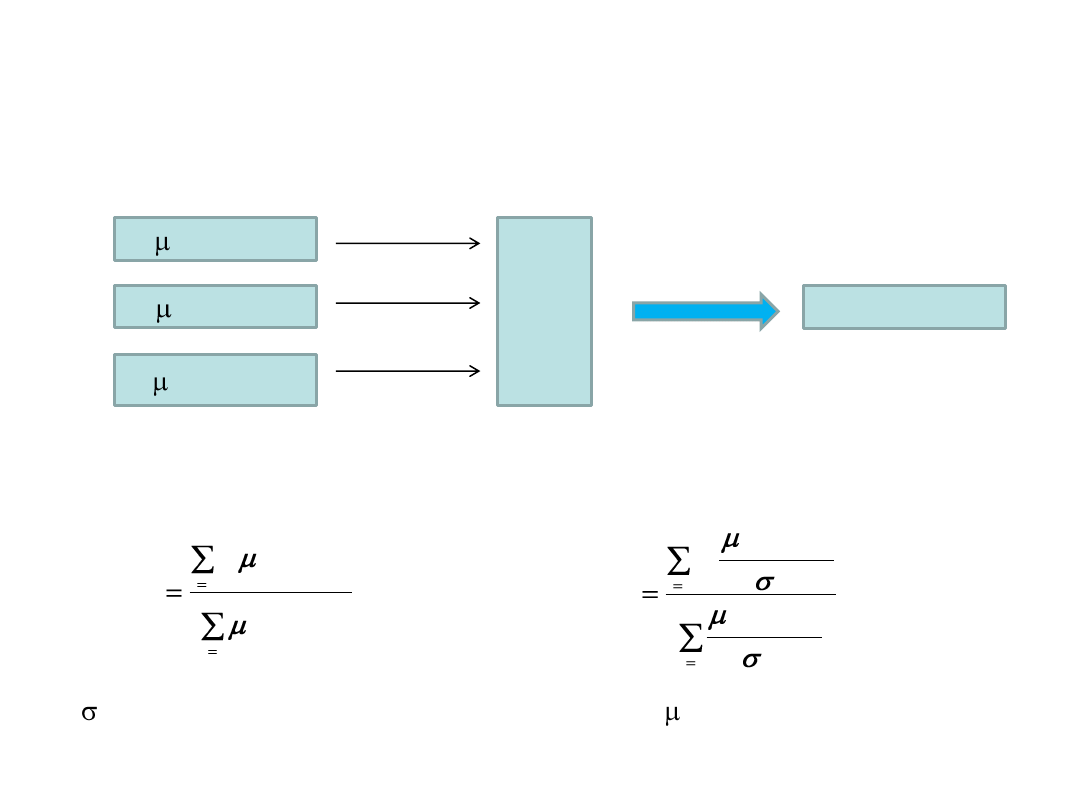
Defuzyfikator
Rodzaje defuzyfikatorów:
a) według średnich wartości centrów b) według ważonych średnich wartości centrów
M
l
l
F
M
l
l
F
l
x
x
c
y
l
l
1
)
(
1
)
(
)
(
)
(
)
(
)
(
M
l
l
l
F
M
l
l
l
F
l
x
x
c
y
l
l
1
)
(
)
(
1
)
(
)
(
)
(
)
(
)
(
)
(
c
l
,
(l)
– centrum (dyspersja) zbioru rozmytego G(l);
F(l)
– funkcja przynależności
zbiorów rozmytych F
(l)
odpowiadających danemu wektorowi wejściowemu
... konwertuje wartości „rozmyte ” do dziedziny wartości „ostrych”.
N
(x) = 0.0
S
(x) = 0.2
W
(x) = 0.9
De
fu
zy
fi
ka
tot
y= ‘wysoki’
Defuzyfikator
Korzystając z opisów defuzyfikatora dowolną funkcją ciągłą f(x) o n elementowym
wektorze x można opisać przy wykorzystaniu pojęć logiki rozmytej. Stosując
interpretację iloczynową funkcji przynależności:
M
l
N
i
l
i
F
M
l
N
i
l
i
F
l
x
x
c
y
l
i
l
i
1
1
)
(
1
1
)
(
)
(
(
)
)
(
(
)
(
)
(
)
(
)...
(
)
(
)
(
2
1
x
y
x
x
n
F
F
F
A
otrzymuje się dla defuzyfikatora
a) średnich wartości centrów b) ważonych średnich wartości centrów
M
l
l
N
i
l
i
F
M
l
l
N
i
l
i
F
l
x
x
c
y
l
i
l
i
1
)
(
1
)
(
1
)
(
1
)
(
)
(
(
)
)
(
(
)
(
)
(
gdzie l=1,2,.., M
oznacza kolejną regułę logiczną.

Sieci neuronowe o logice rozmytej
• Możliwość reprezentacji dowolnej funkcji nieliniowej wielu zmiennych za
pomocą sumy funkcji rozmytych scharakteryzowanych przez funkcje
przynależności uzasadnia możliwość zastosowania funkcji rozmytych do
odwzorowania dowolnych procesów nieliniowych i stanowi alternatywne
podejście do klasycznych sieci neuronowych jednokierunkowych
• Postać funkcji f(x) umożliwia jej implementację jako równoległej struktury
wielowarstwowej, podobnie jak w przypadku sieci sigmoidalnych i
radialnych
Sieci neuronowe o logice rozmytej
2
)
(
)
(
)
(
l
i
l
i
i
c
x
l
i
e
Przyjmując gaussowską postać funkcji przynależności dla i-tej zmiennej
x
i
odpowiadającej l-tej regule w postaci:
funkcja aproksymująca f(x) wyrażoną przez średnie wartości centrów
można zapisać jako:
w której W
l
jest centrum zbioru rozmytego zmiennej wyjściowej.
M
l
N
i
c
x
M
l
N
i
c
x
l
M
l
N
i
l
i
M
l
N
i
l
i
l
l
i
l
i
i
l
i
l
i
i
e
e
W
W
x
f
1
1
1
1
1
1
)
(
1
1
)
(
2
)
(
)
(
2
)
(
)
(
)
(
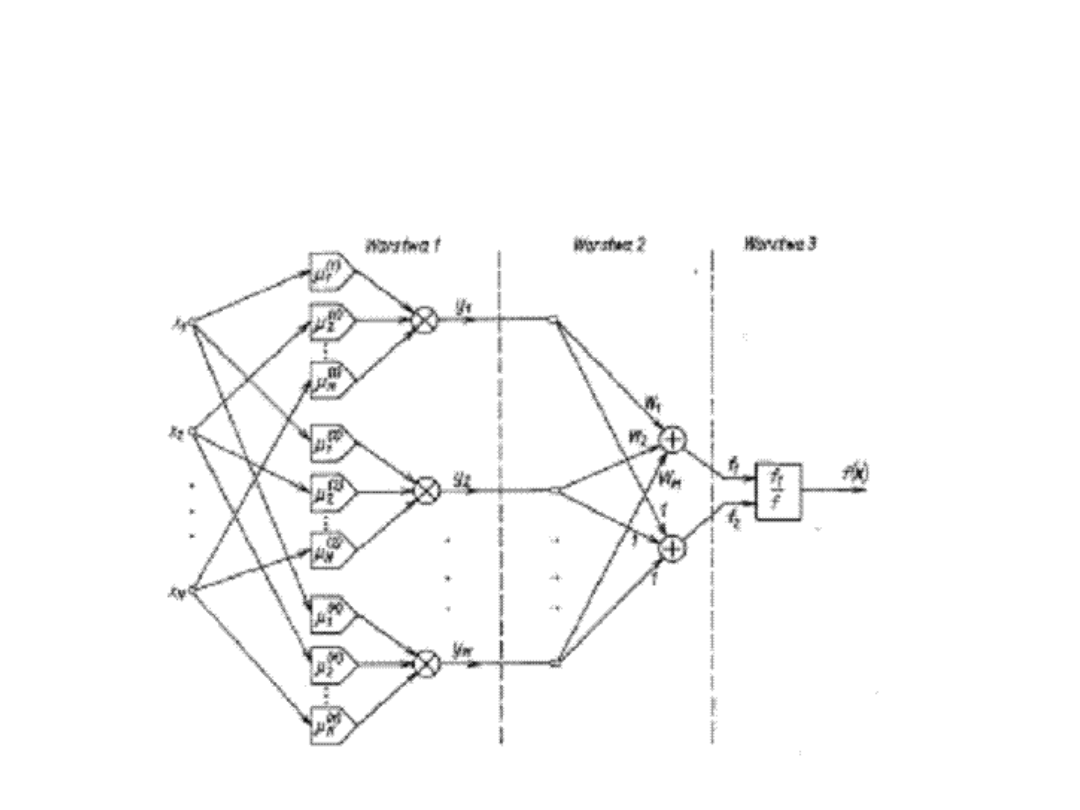
Sieci neuronowe o logice rozmytej –
schemat
Metoda gradientowa
• Zadaniem sieci jest odwzorowanie par danych wejście-wyjście (x,d) w taki
sposób, aby wartość żądana d stanowiąca pożądaną odpowiedź systemu,
była odwzorowana przez funkcję f(x).
• Uczenie sieci polega na doborze parametrów W
l
, c
i
(l)
oraz
i
(l)
(i=1,2,...N,
l=1,2,...,M).
• Uczenie przeprowadza się przez minimalizacją błędu kwadratowego
między wartością żądaną d a jej odwzorowaniem f(x):
2
]
)
(
[
2
1
d
x
f
E
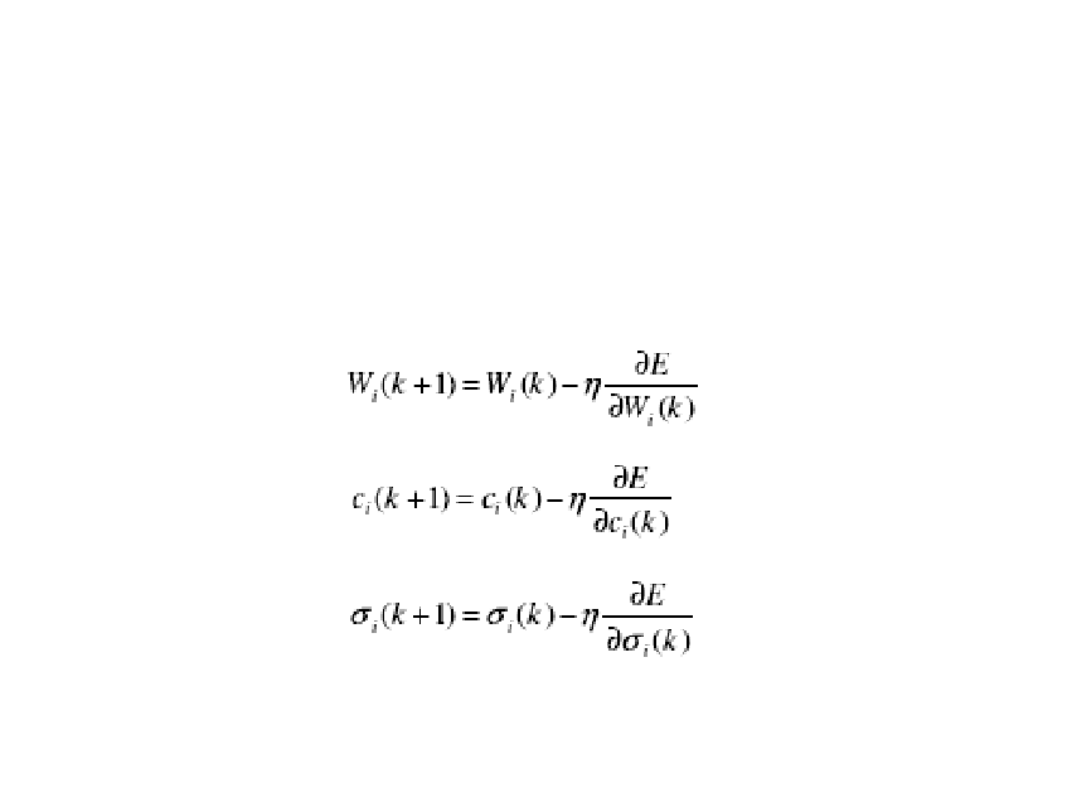
Metoda gradientowa
(Algorytm wstecznej propagacji błędu)
Stosując do minimalizacji metodę największego spadku otrzymujemy w k-tym
kroku uczącym następujące wartości parametrów:
Metoda gradientowa
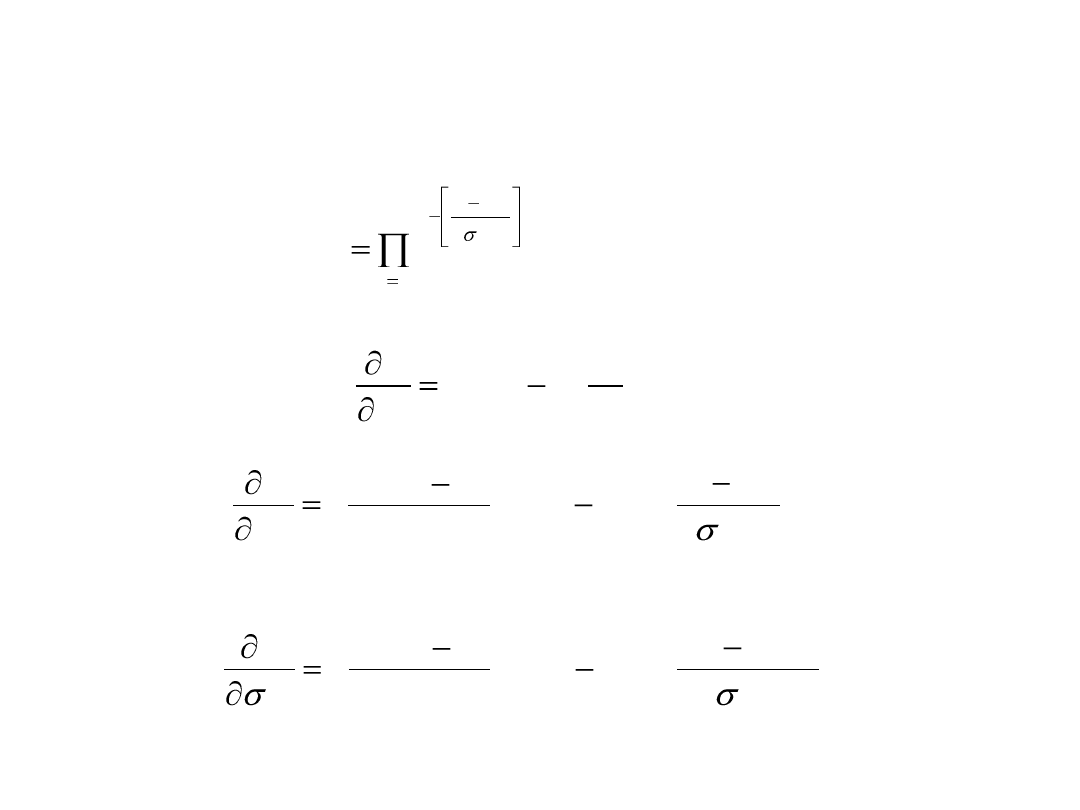
Przyjmując:
2
)
(
)
(
1
l
i
l
i
i
c
x
N
i
l
e
y
otrzymujemy:
2
)
)
(
(
f
y
d
x
f
W
E
l
l
2
)
(
)
(
2
)
(
]
[
)]
(
[
)
)
(
(
2
l
i
l
i
i
l
l
l
i
c
x
x
f
W
y
f
d
x
f
c
E
3
)
(
2
)
(
2
)
(
]
[
)
(
)]
(
[
)
)
(
(
2
l
i
l
i
i
l
l
l
i
c
x
x
f
W
y
f
d
x
f
E
Fazy algorytmu propagacji wstecznej
• podanie na wejście sieci sygnałów wejściowych tworzących wektor x i
określenie wszystkich sygnałów wewnętrznych oraz wyjściowych sieci,
występujących w wyrażeniu określającym gradient;
• określenie wartości funkcji błędu na wyjściu sieci i przez jego propagację w
kierunku wejścia wyznaczenie wszystkich składowych wektora gradientu;
• adaptacja parametrów sieci odbywa się z kroku na krok według wybranej
metody gradientowej z krokiem uczenia
stałym bądź zmiennym.
Cechy charakterystyczne
Mimo podobieństwa funkcji aproksymującej z funkcjami radialnymi istnieją
różnice:
• charakterystyczna interpretacja parametrów funkcji, wynikająca z faktu,
że postać funkcji f(x) jest odzwierciedleniem zasady wnioskowania
logicznego w zbiorach rozmytych zawierającą część warunkową
„jeśli...” oraz część wynikową „to...”:
– parametry c
i
(l)
oraz
i
(l)
są odpowiednio centrami i szerokościami części
„jeśli”
– wagi W
i
odpowiadają ściśle centrom części „to”
• możliwość włączenia w proces uczenia informacji lingwistycznej,
zawierającej się we wnioskowaniu logicznym. Wiedza eksperta
równolegle do danych pomiarowych może zostać wprzęgnięta w proces
uczenia, szczególnie na etapie wstępnym przy doborze początkowych
wartości parametrów optymalizacyjnych.
Uczenie samoorganizujące się sieci
rozmytych
p
l
x
x
p
l
x
x
l
l
l
e
e
d
x
f
1
1
)
(
2
)
(
2
)
(
)
(
Zakładamy, że mamy p par uczących, przy czym każda z par jest
reprezentantem reguły logicznej l: (x
(l)
;d
(l)
). Zakładając, że M=p otrzymujemy:
gdzie wartość parametru s, taka sama dla każdej reguły rozmytej, decyduje o
gładkości odwzorowania. Im mniejsza wartość tym lepsze dopasowanie w
danym punkcie i jednocześnie gorsza gładkość funkcji.
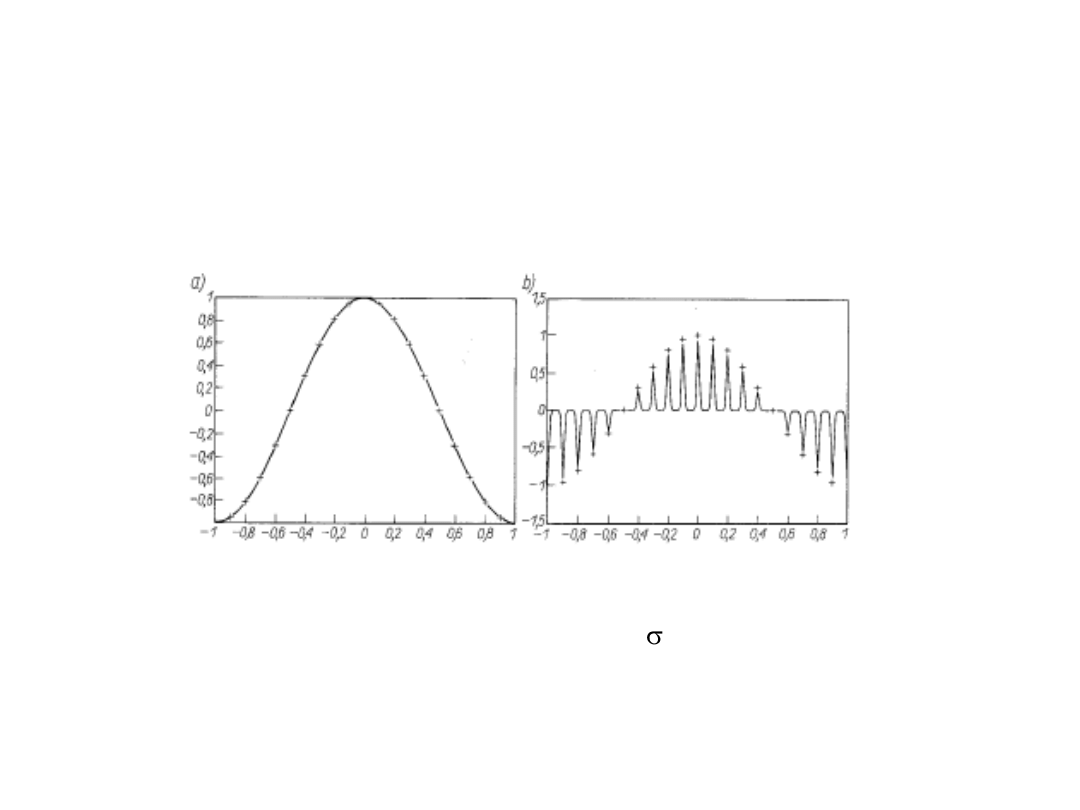
Uczenie samoorganizujące się sieci
rozmytych
Dobór a) właściwego, b) niewłaściwego parametru funkcji rozmytej

Uczenie samoorganizujące się sieci
rozmytych
• Gdy liczba p jest duża przyjęcie M = p jest niepraktyczne. Dane
wówczas mogą być reprezentowane przez M<p klastrów.
• Algorytm automatycznego podziału przestrzeni danych na klastry
(odmiana algorytmu K-
średnich):
– Startując z pierwszej pary danych (x
(1)
, d
(1)
) jest tworzony pierwszy
klaster o centrum c
(1)
=x
(1)
. Zakłada się W
(1)
=d
(1)
oraz liczność zbioru
L
(1)
=1. Niech r będzie oznaczać odległość wektora cech x od centrum,
poniżej której dane będą traktowane jako należące do danego
klastera. (Zakładamy, że w chwili startu istnieje M klastrów).
– Po wczytaniu k-tej pary uczącej (x
(k)
, d
(k)
) następuje wyznaczenie
odległości ||x
(k)
-c
(l)
|| l=1,2,..., M. Określono, że najbliższym centrum jest
c
(z)
.
• jeżeli ||x
(k)
-c
(z)
|| > r zakłada się nowy klaster i ustala odpowiednio jego
parametry (patrz pkt. 1)
Uczenie samoorganizujące się sieci
rozmytych
• jeżeli ||x
(k)
-c
(z)
|| < r uaktualniane są parametry klastra z:
– W
(z)
(k)=W
(z)
(k-1)+d
(k)
– L
(z)
(k)=L
(z)
(k-1)+1
– c
(z)
(k)=[c
(z)
(k-1)L
(z)
(k-1)+x
(k)
] / L
(z)
(k)
Przeprowadzając powyższe kroki do k=p otrzymujemy podział obszaru
danych na M klastrów (odpowiednio dla przyjętej wartości r). Liczebność
każdego z nich jest określona przez L
(l)
(k), centrum przez c
(l)
(k); wartość
skumulowanej funkcji przez W
(l)
(k).
Postać funkcji aproksymującej
p
l
k
c
x
l
p
l
k
c
x
l
l
l
e
k
L
e
k
W
x
f
1
)
(
)
(
1
)
(
)
(
2
)
(
2
)
(
)
(
)
(
)
(
Uczenie na podstawie tabeli przejść
• Etapy uczenia:
– Podział przestrzeni danych wejściowych i wyjściowych na podzbiory rozmyte z
przyporządkowaną odpowiednią funkcją przynależności
– Generowanie reguł rozmytych na podstawie danych uczących i ich podziału na
zbiory rozmyte
– Hierarchizacja reguł - powiązanie z każdą regułą jej stopnia w hierarchii.
W przypadku sprzeczności za obowiązującą przyjmuje się regułę o
największym stopniu
– Określenie tabeli reguł wynikowych podejmowania decyzji:
– Defuzyfikacja
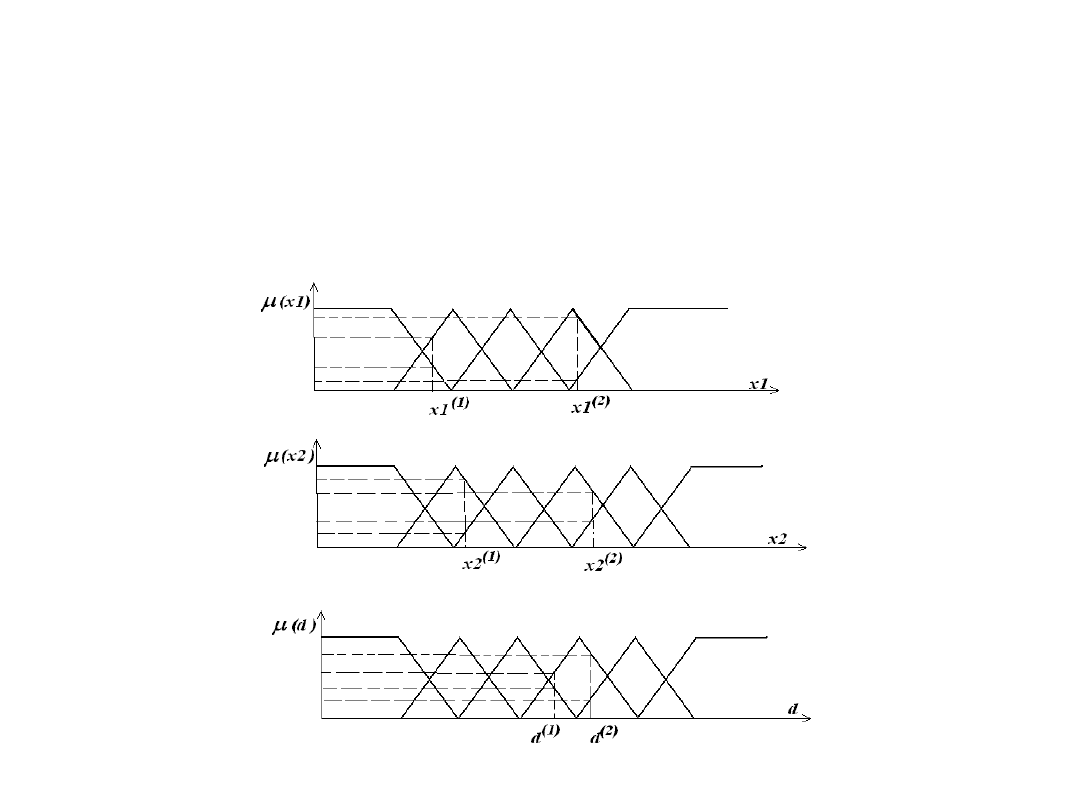
Podział przestrzeni danych wejściowych i
wyjściowych na podzbiory rozmyte
Strategia defuzyfikacji
W celu określenia konkretnej wartości y odpowiadającej wymuszeniu
opisanemu wektorem x
(i)
(i=1,2,...,M) podanemu na wejście układu o
logice rozmytej stosuje się następujące etapy:
• określenie wartości kombinowanej funkcji przynależności wektora x
(i)
do różnych stref zmiennej wyjściowej
)
(
)
(
)
(
)
(
)
(
)
(
3
)
(
2
)
(
1
)
(
3
2
1
)
(
N
I
I
I
I
i
y
x
x
x
x
i
N
i
i
i
i
przy czym y
(i)
oznacza zakres zmiennej wyjściowej odpowiadającej i-
tej regule, a I
j
(i)
– zakres zmiennej wejściowej x
j
odpowiadający i-tej
regule.
• Wyznaczenie wartości zmiennej wyjściowej y odpowiadającej zbiorom
wektorów x(i) według reguły uśrednionych centrów
Strategia defuzyfikacji
M
l
i
y
M
l
i
y
i
i
i
d
y
1
)
(
1
)
(
)
(
)
(
)
(
przy czym d
(i)
oznacza wartość centralną i-tego zakresu zmiennej
wyjściowej, a zatem wartość d, przy której funkcja przynależności jest
równa 1. M jest liczbą reguł logicznych zastosowanych do określenia
odpowiedzi układu (liczba różnych wartości wektora wejściowego x).
•
Przy większej liczbie wyjść układu postępuje się identycznie dla każdej
zmiennej wyjściowej.
Wyszukiwarka
Podobne podstrony:
Materiały do definicji i podziału logicznego, ADMINISTRACJA, I rok II semestr, Podstawy logiki prakt
1 Filozoficzne podstawy logiki
Algorytmy logiki rozmytej kuniszyk
Materiały do wnioskowań niededukcyjnych, ADMINISTRACJA, I rok II semestr, Podstawy logiki praktyczne
Materiały do wnioskowań prawniczych, ADMINISTRACJA, I rok II semestr, Podstawy logiki praktycznej
Podstawy logiki - przystępne opracowanie, Socjologia, Logika, Logika, teoria poznania
podstawy logiki praktycznej
01 b Wstep do logiki rozmytej
Logika i teoria mnogości, podstawy logiki teorii mnogosci
Podstawy logiki i teorii mnogos Nieznany
Tadeusz Batóg Podstawy logiki (11 20)
podstawy logiki i teorii mnogosci
Notatki z logiki na podstawie slajdów
logika rozmyta podstawy T2S7PQMXQRIVWT2MZWHXHR
Podstawowe zagadnienia kursu Logiki dla prawnikÄ lw i interpretacji prawa dla studentÄ lw EWSPA[1] 1
więcej podobnych podstron