Ćwiczenie B
Linearyzacja półmostka przez zmianę prądu zasilania
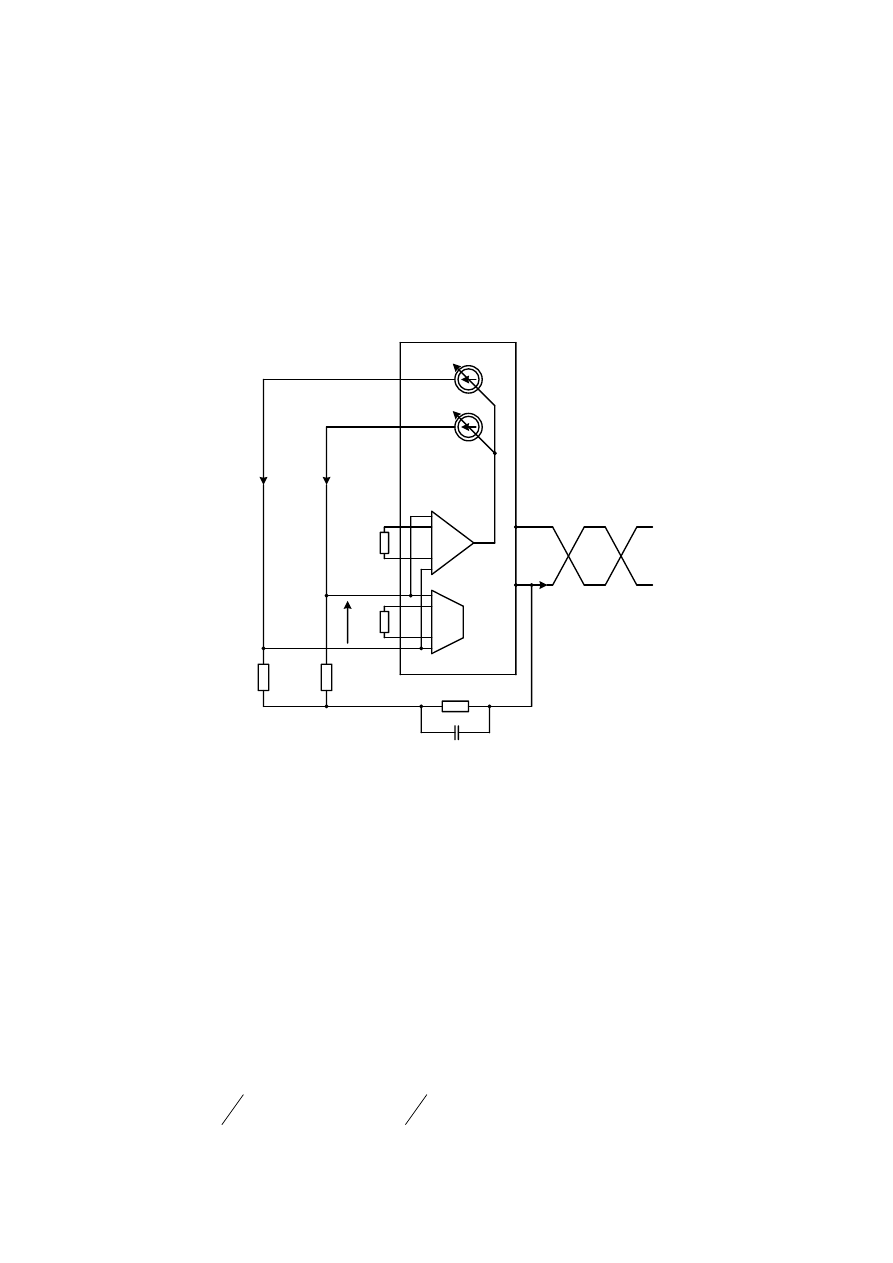
Linearyzacja półmostka, zawierającego czujnik rezystor platynowy PT 100, przez zmianę
prądu zasilania przedstawiono na rysunku . Rozwiązanie to zastosowano w układzie XTR
103, opracowanym przez firmę Burr-Brown.
R
LIN
R
G
-
+
-
+
R
o
R
pT
R
CM
I
R
I
R
E
o
XTR 103
mA
)
20
4
(
Rys. 38.6. Linearyzacja półmostka przez zmianę prądu zasilana
R
G
– rezystor wzmacniacza, R
LIN
– rezystor układu linearyzującego
Napięcie
0
E
, będące różnicą napięć występujących na rezystorach platynowym
PT
R
(PT 100) i odniesienia
0
R jest podawane na wejście układu
.
0
0
R
PT
I
R
R
E
(1)
Rezystancja rezystora platynowego zmienia się w zależności od temperatury zgodnie z wy-
rażeniem
,
1
2
0
0
0
t
t
B
t
t
A
R
R
PT
(2)
gdzie: A i B współczynniki temperaturowe platyny,
,
1
10
908
,
3
0
3
C
A
.
1
10
5802
,
0
2
0
6
C
B
Prąd
R
I w układzie XTR 103 jest powiązany z napięciem
0
E relacją
,
0
0
LIN
R
R
K
E
I
I
(3)
gdzie:
0
I - znamionowy wymuszony prąd płynący przez półmostek
,
8
,
0
0
LIN
R
gdy
mA
I
K
– stała układu XTR 103,
,
5
,
0
K
LIN
R
- rezystor układu linearyzującego.
Podstawiając podane zależności do równania (1) praz przyjmując, że tor pomiarowy będzie
stosowany do pomiarów temperatur w przedziale od
C
t
0
0
0
do
max
t
t
otrzymano
.
1
0
0
0
2
0
0
LIN
R
K
E
I
R
Bt
At
R
E
(4)
Po przekształceniu uzyskano
.
1
0
0
2
0
2
0
R
I
Bt
At
R
K
R
Bt
At
E
LIN
(5)
Napięcie
0
E będzie liniowo zależne od mierzonej temperatury
t
gdy zostanie spełniony
warunek
At
Bt
At
R
K
R
Bt
At
LIN
2
0
2
1
.
(6)
Po przekształceniu tej relacji otrzymano
.
1
2
2
0
Bt
At
Bt
At
R
K
R
At
LIN
(7)
Stąd wyrażenie określające rezystancję
LIN
R
układu linearyzującego
.
0
Bt
A
B
A
KR
R
LIN
(8)
Optymalną rezystancję rezystora
LIN
R
otrzymuje się po wywzorcowaniu układu. Po speł-
nieniu tego warunku napięcie liniowe półmostka
At
I
R
E
0
0
0
(9)
jest liniowo zależne od temperatury otoczenia PT 100.
Precyzyjne przetwarzanie sygnałów zgodnie z powyższym równaniem jest ściśle realizo-
wane tylko w wąskich trzech przedziałach, w środkowym przedziale temperatur i dla skraj-
nych wartości obszaru pomiarowego. Powodem są przyjęte uproszczenia w obliczeniach oraz
to, że linearyzator ma charakterystykę opisaną równaniem drugiego rzędu i nie uwzględnia
parametrów rezystora platynowego opisanych wyrażeniem Ct
3
. Mimo tych założeń uprasz-
czających konstrukcję linearyzatora, linearyzator charakteryzuje się bardzo dobrymi parame-
trami i przy starannym doborze rezystorów R
G
i R
LIN
błąd linearyzacji nie przekracza
0,1%.
Odnosząc tę wartość do parametrów rezystora PT 100 pracującego w przedziale temperatur od
0 do 800
o
C o błędzie nieliniowości –11,88%, wynika, że stosując układ XTR 103 zmniej-
szamy przeszło 100 razy błąd nieliniowości toru pomiarowego.
Rezystancję
G
R wzmacniacza określono ze wzoru opisującego układ XTR 103
,
4
40
016
,
0
6
0
R
E
I
L
(10)
przy czym :
L
I - prąd wyjściowy , prąd w pętli prądowej w mA,
E
- napięcie na wyjściu półmostka w mV,
G
R - w
.
Podstawiając do powyższej zależności relację (9) i przekształcając ją otrzymano
.
016
,
0
4
40
0
0
At
I
R
I
R
L
G
(11)
Wzór ten umożliwia określenie rezystancji
G
R wzmacniacza .
Przykład
Wyznaczyć wartości rezystorów układu XTR 103 wzmacniacza
G
R i linearyzatora
LIN
R
jeżeli czujnik , rezystor PT 100 współpracuje z systemem pomiarowym przeznaczonym do
pomiaru temperatury w przedziale od
C
0
0
0
t
do
C
800
0
max
t
t
.
Rezystancję
LIN
R
układu linearyzującego wyznaczamy ze wzoru (8) podstawiając
C
t
t
0
max
800
8
,
1139
800
10
5802
,
0
10
908
,
3
10
5802
,
0
10
908
,
3
100
5
,
0
6
3
6
3
max
0
t
B
A
B
A
R
K
R
LIN

Rezystancję
G
R wzmacniacza toru pomiarowego określamy z zależności (11), podstawiając
za
C
t
t
0
max
800
i przyjmując , że odpowiadający tej temperaturze prąd wyjściowy
.
20mA
I
L
8
,
833
016
,
0
800
10
908
,
3
8
,
0
100
4
20
40
016
,
0
4
40
3
max
0
0
t
A
I
R
I
R
L
G
8
,
833
G
R
Firma Burr-Brown w tabeli 1dla błędu linearyzacji 1% podaje wartości
,
860
G
R
a
.
1089
LIN
R
W ćwiczeniu laboratoryjnym wartości te zostaną określone eksperymentalnie za pomocą
potencjometrów wieloobrotowych i odpowiedniej procedury pomiarowej. Proces ten umożli-
wia zmniejszenie błędu linearyzacji do wartości 0,1%.
Wyszukiwarka
Podobne podstrony:
Plik acrobat Cwiczenie 4 id 630 Nieznany
Plik acrobat Cwiczenie 5 id 630 Nieznany
Plik acrobat Cwiczenie 3 id 630 Nieznany
Abolicja podatkowa id 50334 Nieznany (2)
4 LIDER MENEDZER id 37733 Nieznany (2)
katechezy MB id 233498 Nieznany
metro sciaga id 296943 Nieznany
perf id 354744 Nieznany
interbase id 92028 Nieznany
Mbaku id 289860 Nieznany
Probiotyki antybiotyki id 66316 Nieznany
miedziowanie cz 2 id 113259 Nieznany
LTC1729 id 273494 Nieznany
D11B7AOver0400 id 130434 Nieznany
analiza ryzyka bio id 61320 Nieznany
pedagogika ogolna id 353595 Nieznany
Misc3 id 302777 Nieznany
więcej podobnych podstron